MOTION CPU实模式控制方法
虚拟化性能调优之cpu篇
虚拟化性能调优之cpu篇CPU优化分析主要是两个阶段,虚拟化层和宿主机层。
前期主要怀疑是虚拟化层的影响,主要的怀疑点包括:1.超线程的影响关闭超线程之后单核性能有略微提升,但多核性能反而更差,排除超线程的因素2.NUMA架构和核迁移的影响按理说如果不按照NUMA的架构来做核绑定,由于缓存和迁移的影响,或造成较大的性能损失,通过绑定物理核测试发现并没有大的提升,排除该因素3.CPU模式的影响,包括指令集和缓存分析与vmware的差异,发现我们的指令集和cpu缓存与真实物理机不一致,通过cpu-passthrough和替换qemu版本将host cpu的特性透传仍然无法提升cpu性能排除了虚拟化层的影响,后来测试发现宿主机本身才是cpu性能的关键,部署了一个redhat对比环境发现宿主机跑分和redhat未经调优过系统差距很大。
分析了内核配置参数差异(sysctl)和编译参数差异,没有发现可疑的地方。
决定内核行为的并且用户可以干预的只剩下启动参数了,对比发现系统关闭了intel的cstate功能。
写了一个简单的死循环测试对比两个系统的表现,发现redhat内核有负载的cpu频率可以提高到3.1GHz,而当前host机只能达到2.6GHz,即使调整了cpufreq的模式为performance也无法让cpu达到更高的主频。
所以基本可以确认是这个参数导致的。
打开系统中cstate功能,跑speccpu可以达到和redhat类似的性能分数。
解决措施:目前发现cstate功能和调频功能有耦合,需要使能cstate 来解决cpu性能问题,去掉启动参数intel_idle.max_cstate=0 idle=pollintel cpu调频和节能相关的几个机制简介:cpufreq:提供频率调节功能,可以让cpu根据不同负载使用不同的频率,达到性能和功耗的动态可调整,服务器一般配置为performance,个人pc可以配置为ondemand或者powersave模式cstate:cpu深度睡眠节能模式,根据cpu睡眠器件,定义了多种睡眠状态,提供不同程度的节能选择,睡眠模式越高,唤醒代价越大。
联想 电脑 说明书
2.1 软件介绍 ........................................................................... 15 2.2 一键恢复 ........................................................................... 16 2.3 杀毒软件 ........................................................................... 20
第 4 章 系统及驱动安装 ..................................................... 36
4.1 Windows XP 系统的安装 ................................................ 36 4.2 驱动安装 ........................................................................... 38
锋行系列用户手册 3
部分机型的后面板接口如图所示,请根据您的实际配置参考。
220V 电源接口:用于向主机供电 液晶显示器电源接口:用于向本机配套液晶显示器供电 鼠标接口:用于接 PS/2 接口的鼠标 键盘接口:用于接 PS/2 接口的键盘 串行口:用于接串行接口设备 并行口:用于接并行接口设备 显示器信号线接口:用于输出显示器的信号 (VGA 信号 ),接显示器的信号线 ( 有外插显 卡的时候,此接口的 VGA 信号被屏蔽 ) 网卡接口:可以连接局域网或用于连接宽带上网设备 USB 接口:用于接 USB 接口设备,如 USB 接口打印机 麦克风接口:接麦克风,可以将麦克风接收到的声音输入电脑 音箱 / 耳机接口:接音箱或者耳机,需要接耳机时,将音箱的接头拔下,换上耳机接头 音频输入口:用于将立体声的声音输入电脑 外插显示卡输出信号接口:用于连线显示器信号线 ( 部分机型有此接口 ) 调制解调器接口:接墙上电话口接出来的电话线 ( 部分机型配置调制解调器 )
Gx Works2 入门指南(结构化工程篇)

[ 设计注意事项 ]
警告
● 应在可编程控制器的外部设置互锁电路,以便在通过个人计算机对运行中的可编程控制器进行数据变更、程序变更、状态控制 时,能够确保整个系统的安全。 此外,通过个人计算机对可编程控制器 CPU 进行在线操作时,应预先确定由于电缆连接不良等导致发生通信异常时的系统处理 方法。
[ 启动、维护时的注意事项 ]
3 - 2
程序的动作 ........................................................................ 3 - 2 创建的程序 ........................................................................ 3 - 2 3 - 3
注意
● 将个人计算机连接到运行中的可编程控制器 CPU 上进行在线操作 ( 可编程控制器 CPU 运行中的程序变更、强制输入输出操作、 RUN-STOP 等运行状态的变更、远程操作 ) 时,应在熟读手册并充分确认安全的基础上执行。 此外,在对运行中的可编程控制器 CPU 进行程序变更时,根据操作条件有可能发生程序损坏等的问题。请在充分理解 GX Works2 Version 1 操作手册 (公共篇)中记载的注意事项的基础上使用。 ● 在 QD75/LD75 型定位模块中使用原点回归、JOG 运行、寸动运行、定位数据测试等的定位测试功能时,应在熟读手册并确认充 分安全的基础上,将可编程控制器 CPU 置为 STOP 后执行。特别是在网络系统中使用时,操作人员有可能无法对机械动作进行 确认,因此应在确认充分安全后执行。如果操作失误有可能导致机械损坏或引发事故。
䄺ਞ ⊼ᛣ
㸼冫䫭䇃᪡ৃ㛑䗴៤ॅ䰽ৢᵰˈᇐ㟈⅏ѵ䞡ӸџᬙDŽ
MITSUBISHI CC-Link数字模拟变换模块 用户说明书
! 危险
表示错误操作可能造成灾难性后果 引起死亡或重伤事故
! 小心
表示错误操作可能造成危险后果 引起人员轻伤 中度伤害或财产 损失
注意根据情况不同 ! 小心这一级也能引发严重后果 因此一定要遵守以上两级对人员安全非常重要的注意事项
请仔细保管本手册 把它放在最终使用者易于取阅的地方
[设计注意事项]
! 危险
[接线注意事项] ! 小心
在开始安装 接线或其它工作之前 必须断开外部所有相的电源 不这样做可能会损坏产品或出现故障 必须把 FG 端子接到保护接地导线上再接地 不这样做可能导致故障 在确认了产品的额定电压和端子接线正确无误之后再为模块正确接线 不这样做可能导致火灾或失效 一定要在规定扭矩范围内紧固端子螺钉 如果没有拧紧可能导致短路或故障 如果拧得过紧可能由于损坏螺钉或模块而导致短路或故障 一定不要让异物 如碎片或接线头 进入模块 异物进入模块可能导致火灾 失效或故障
在符合本手册中规定的一般操作环境规格下使用 PLC 在不符合本手册中规定的一般操作环境规格下使用 PLC 时 可能会引起电击 火灾 故障 并 会损坏模块 或使模块性能变差 把模块紧固到 DIN 导轨上 或用安装螺钉紧固 但要在规定扭矩范围内拧紧安装螺钉 如果没有拧紧可能导致跌落或故障 如果拧得过紧可能由于损坏螺钉或模块而导致跌落或故障 不要触摸模块的导电区或电器部件 这样做可能导致模块故障或断裂
ቤተ መጻሕፍቲ ባይዱ
本手册阐述了MELSECNET/10网络系统(PC-to-PC网络)的系统配置,特点,功能,设置和
编程。
MELSECNET/10网络系统(远程I/O网络)
SH(NA)-080214C
本手册阐述了MELSECNET/10网络系统的配置,操作特性,功能,设置和编程。
PLC编程说明书
本说明书将安全注意事项划分为, ,
危险
警告
注意
3 个级别。
危险
如果进行了错误操作,一定会对使用者造成死亡或重伤 等危害的情况下采用危险提示
警告
如果进行了错误操作,可能会对使用者造成死亡或重伤 等危害的情况下采用警告提示
注意
如果进行了错误操作,可能会对使用者造成伤害 或损坏机床的情况下采用注意提示
由于具体状况不同, 甚至提示 本说明书记载的内容。
请按照地方法规处理使用过的电池。
目录
1.前言 ................................................................................................................................................ 1 2.DASEN-16i 的特点 ......................................................................................................................... 1 3.DASEN-16i 程序构成 ..................................................................................................................... 2 3.1 并列处理任务 .......................................................................................................................
ARM Cortex-M3处理器简介

ARM 白皮书
——ARM Cortex-M3 处理器简介 Shyam Sadasivan October 2006
广州周立功单片机发展有限公司 地址:广州市天河北路 689 号光大银行大厦 15 楼 F1
ARM 白皮书
目录
目录
第 1 章 简介 ....................................................................................................................................1 1.1 通过提高效率来提高性能................................................................................................1 1.2 快速有效的应用程序开发源于简易的使用方法 ............................................................1 1.3 针对敏感市场降低成本和功耗........................................................................................1 1.4 集成的调试和跟踪功能推进上市的步伐........................................................................2 1.5 从ARM7TM升级为Cortex-M3 可获取更佳的性能和功效 ..............................................2
第 5 章 针对无线网络实现了更低的功耗...................................................................................15 5.1 时钟门控和内置睡眠模式可以降低功耗......................................................................15 5.2 通过灵活的工作方式来增加处于睡眠模式的时间 ......................................................15 5.3 真正实现省电..................................................................................................................16
Intel Z590 系列 BIOS 用户指南说明书

Memory Configuration(高级内存设置) ................................................................ - Over Voltage Configuration(高级电压设置) ......................................................... - ADVANCED(高级模式)................................................................................. - Advance(高级) ..................................................................................................... - -
进入 BIOS ...................................................................................................................- BIOS 设置程序主界面..................................................................................................- BIOS 控制方式 ............................................................................................................- BIOS 功能键................................................................................................................ - BIOS 语言设置 ............................................................................................................- 启动项设置......................................................................................................- XMP 设置........................................................................................................ - -
最全面的三菱伺服试培训教材

三菱伺服培训教材第一章概要1.1运动控制器的特点1.2.1实模式概略1.2.2实模式框图1.3.1虚模式概略1.3.2虚模式框图1.4系统建立步骤1.5小结1.1运动控制器的特点1、QPLC CPU和多CPU系统复杂的伺服控制由Q MOTION CPU模块进行处理,其他的机械控制,过程控制由QPLC CPU负责2、符合多用途的产品Q172CPU1~8轴的多轴定位功能Q173CPU1~32轴的多轴定位功能3、可与伺服放大器进行高速的串行通讯通过SSCNET网络进行高速通讯,可进行伺服数据收集、参数变更、伺服测试、伺服监控、机械言程序监控。
4、可实现绝对位置系统通过带有绝对位置编码器的伺服马达可以实现绝对位置定位。
5、操作系统(OS)可变更根据不同的工艺控制要求,可以选择对应适用的OS版本•SV13用于搬运及组装。
如搬运机、注塑机、涂装机等•SV22用于自动机。
如同步控制,食品、包装等•SV43用于机床行业•SV51用于机械手6、凸轮软件(仅用于SV22)将机械机构中常用的凸轮机构以伺服马达控制,变换为虚拟模式的凸轮输出。
7、机械支持语言(仅用于SV22)将运动从原来的机械性的整合解放出来,通过软件对机械机构的运动控制器进行处理,从而执行伺服马达的控制,可以提高定位控制的功能和性能,通过电气化的方式减少机械结构上的制约,达到更合理的设计效果。
减少系统成本。
1.5小结第二章功能说明2.1运动控制器规格2.2运动控制器的系统配置2.2.1Q173CPU2.2.2Q172CPU2.2.3Q172LX/EX2.2.4Q173PX2.3小结2.3小结本章主要说明的Q运动控制器系统的硬件组成、Q172/Q173CPU之间的功能比较以及运动控制器专用模块的功能说明第三章多CPU系统3.1多CPU系统概述3.2多CPU的安装位置3.2.1多CPU输入输出编号3.3共享存储器的自动刷新3.4多CPU运动控制器专用指令3.4.1SFC程序启动命令SFCS3.4.2SFC程序启动命令SVST3.4.3值变更命令CHGA/CHGV/CHGT3.4.4软元件读取/写入DDWR/DDRD3.5小结3.1多CPU系统概述多CPU系统将多台(最多4台)QPLC CPU/Q Motion CPU安装在基板上,由各QPLC CPU/Q Motion CPU对输入输出模块,智能模块进行控制的系统。
迈信电气EP3使用说明

海天注塑机器操作说明书

电脑全自动塑料注射成型机操作说明书型号: TT-160B(配弘讯A62I5Color电脑)中国北方工业集团总公司北京泰坦塑料机械有限公司地址:北京市通县半壁店街北口一号香港泰坦塑料机械有限公司地址:香港荃湾白田霸街5-21号,嘉力工业中心,A座16楼24室BTT北京泰坦塑料机械有限公司TT-160C(A62I5Color)2言前感谢阁下使用泰坦注塑机!泰坦系列电脑全自动塑料注射成型机,用于热塑性塑料的成型加工,其工艺过程是用一整套专用的塑料成型模具安装在注塑机锁模部分的定模板与动模板之间,经过高压锁模后,由射台部分注入高压的经加热、塑化过的塑料,经过快速冷却后形成塑料制品。
泰坦注塑机外形美观、操作方便、维修简单、生产效率高能很好地满足贵公司的生产要求。
为协助贵公司能更快、更好地使用我们产品的先进功能,本说明书将向您提供非常详细的技术资料。
贵公司如对我们的产品有任何不解之处,我们非常愿意为阁下一一解答。
祝阁下生意兴隆!出厂编号:出厂日期:2007年5月BTT北京泰坦塑料机械有限公司TT-160C(A62I5Color)3目录1安全性说明 (1)1.1 1.2 1.3 1.4不安全的因素........................................................................ . (1)安全规则........................................................................ (1)本机所具备的安全设施........................................................................ (2)警告标志说明........................................................................ . (2)2技术参数 (3)2.1 2.2 2.3 2.4代号说明........................................................................ (3)动力及其它部分........................................................................ (3)锁模部分........................................................................ (3)射台部分........................................................................ (3)3机器的安装 (4)3.1 3.2 3.3机器的起吊........................................................................ .. (4)机器的安装地基图........................................................................ (4)校水平及机身清理........................................................................ .. (5)BTT 北京泰坦塑料机械有限公司 TT-160C(A62I5Color) 43.43.53.63.73.8 电源接线......................................................................................................... 5 冷却水............................................................................................................. 5 注油及润滑..................................................................................................... 6 机器的操作空间 (7)机器运行的自然环境和条件......................................................................... 7 4 操作机器的一般常识 .. (8)4.1 机器的启动和停止 (8)4.1.1 4.1.24.1.3 启动前的工作 ........................................................................................................8 机器的启动 ............................................................................................................8 机器的停止 (8)4.24.34.4 动作循环顺序表............................................................................................. 8 机器自动模式的操作说明............................................................................. 9 可预见性误用............................................................................................... 10 5 电脑控制系统的调试 (11)5.15.2 操作画面的说明 (12)画面的选择...................................................................................................... 13 5.3 主机画面的设定 (14)5.3.1 5.3.2 如何设定开关模 ..................................................................................................14 如何设定托模 (15)BTT 北京泰坦塑料机械有限公司 TT-160C(A62I5Color) 55.3.35.3.45.3.55.3.65.3.75.3.85.3.9 如何设定射出 ......................................................................................................16 如何设定射出储料功能 ......................................................................................17 如何设定中子 ......................................................................................................18 如何设定温度 ......................................................................................................20 如何进行其它设定 ..............................................................................................21 如何使用监测 ......................................................................................................22 如何显示纪录 (24) (26)如何设定参数 (34)如何设定模具资料 (37)版本信息 (40)5.4 参数表........................................................................................................... 43 5.4.1 5.4.25.4.3 参数一 (43)参数二 ..................................................................................................................46 参数三 (48)5.5 警报说明及故障排除........................................................................................50 6 机器的保养 (53)6.16.26.3 机器的例行检查........................................................................................... 53 压力油........................................................................................................... 53 机器的保养................................................................................................... 53 7 液压系统的维修....................................................................................54 7.1 液压系统的概况........................................................................ (54)BTT北京泰坦塑料机械有限公司TT-160C(A62I5Color)67.2 7.3 7.4液压系统的工作循环表........................................................................ . (54)液压系统原理图........................................................................ (55)液压阀块介绍........................................................................ .. (56)8电器系统的维修 (57)8.1 8.2 8.3电器控制系统的一般说明........................................................................ (57)行程开关位置及作用........................................................................ (58)AC控制原理图 (59)9液压系统零件清单 (60)BTT北京泰坦塑料机械有限公司TT-160C(A62I5Color)1 1 安全性说明1.1 1.不安全的因素动模板与定模板之间,是最大的风险区,由于动模板的移动速度快;互相间夹持的力量大,操作者经常进入此风险区拿取制品,所以很容易造成剪切,挤压等危险。
五轴工业机器人控制系统设计

五轴工业机器人整体结构设计摘要五轴工业机器人是一种工业上的关节机器人,其广泛应用于世界的工业自动化领域,在世界上,我国的五轴工业机器人技术相比于国外发达国家无论是从时间还是技术方面都比较落后,并且很多零部件以及芯片都离不开外货进口。
五轴工业机器人控制系统是五轴工业机器人智能化和人工化的核心系统之一,因此控制系统的功能强度,性能的好坏直接影响着五轴工业机器的整体控制性能以及工作状态。
本文将对五轴工业机器人的控制系统进行硬件系统的设计、软件的选择以及程序的编写,并对它运动轨迹进行规划,对伺服控制系统的电机进行选择、对运作位置进行设计。
关键词:五轴工业机器人;软硬件控制;电机的选择;控制系统设计Design of five-axis Industrial Robot Control SystemAbstractFive-axis industrial robot is an industrial joint robot widely.It is used in the world's industrial automation field. Compared with developed countries, Chinese five-axis industrial robot technology is relatively backward in terms of time and technology, and many parts and chips cannot be separated from foreign imports. Five-axis industrial robot control system is one of the intelligent and artificial core systems of five-axis industrial robot. The function of the control system,whose strength and performance is good or bad directly affect the overall control performance of five-axis industrial robot and the stability of the working state.This design will carry out hardware system design, software selection and program preparation for the control system of the five-axis industrial robot, and planing it’s motion trajectory, selectting the motor of the servo control system, and designing the operation position.Key words:Five-axis industrial robot,hardware and software controlling,Motor selection,control system designing.目录1 前言 (1)1.1本设计的目的、内容及意义 (1)1.2本设计在国内外的发展概况 (3)1.2.1国外研究现状 (3)1.2.2国内研究现状 (3)1.3本设计应解决的主要问题 (4)1.4 研究的基本思路和方法 (4)2对于五轴工业机器人工作的原理分析 (5)2.1五轴工业机器人运作原理 (6)2.2五轴工业机器人控制系统的综合评述 (6)2.2.1五轴工业机器人控制系统的特点 (6)2.2.2五轴工业机器人的贴标工艺 (6)3五轴工业机器人硬件控制系统的设计 (7)3.1控制原理的分析 (7)3.2硬件控制系统组成与内部选择 (7)3.2.1硬件控制系统的组成部分 (7)3.2.2硬件控制系统的内部选择 (8)3.3CPU硬件控制系统的设计 (9)3.3.1CPU硬件控制系统构架设计 (9)3.3.2CPU的控制器的外部电路的设计 (10)3.3.3 JTAG接口线路的设计 (12)3.3.4总控制芯片最小系统设计 (13)3.3.5 FPGA逻辑处理单元设计 (15)3.4伺服电机及伺服驱动器的选择 (17)3.5控制柜的设计 (19)3.5.1控制柜内部电源设计 (19)3.5.2变压器的设计 (21)3.5.3中间继电器的选择 (21)3.5.4急停按钮与指示灯的选择 (22)3.5.5 PLC的选择 (24)3.5.6 I/O板的设计 (26)3.5.7 工控机的选择 (27)3.5.7 导线的选择 (28)3.5.8 控制柜的设计 (29)4.五轴工业机器人的轨迹规划 (30)4.1轨迹规划应考虑的问题 (30)4.2五轴工业机器人的轨迹规划 (31)4.2.2圆弧轨迹规划 (32)5软件的选择与电机的仿真 (33)5.1软件的选择 (33)5.1.1 DEV C++软件界面的介绍 (33)致谢 ...................................................................................................................错误!未定义书签。
FOXBORO电磁流量计使用说明书
MI 021-390 2002 年 4 月
I/A 系列电磁流量变送器 型号 IMT25 带 FOXCOM 通讯
本机面板/显示操作、组态与标定
内容
MI 021-390
图 ............................................................ iv 表格 ........................................................... v
校验设置........................................................ 32 流量计系数.................................................... 32 模拟输出校验.................................................. 32 预设定输出.................................................... 33
特征设置........................................................ 29 密码设置...................................................... 29 变送器设置.................................................... 30 变送器工作模式................................................ 30 电源频率...................................................... 30 流向.......................................................... 30 触点输入 1 与触点输入 2 ........................................ 31 噪音降低...................................................... 31 空管检测...................................................... 31
合信技术CTSC-200运动控制CPU 用户手册V1.10

注意事项
CTSC-200 系列运动控制的安装、操作、维护工作仅限于合格人员执行。对于使用本资料所引 发的任何后果,合信概不负责。 在尝试使用本设备之前,请仔细阅读设备相关注意事项,务必遵守安装调试安全预防措施和操 作程序。对错误使用本设备而可能带来的危害和损害程度见下述符号说明。
警告
该标记表示 “由于没有按要求操作造成的危险,可能导致人身伤亡”
IV
5
位置控制............................................................................................................................. 20 5.1 5.2
6
速度控制............................................................................................................................. 23 6.1 6.2
9.2 9.3 9.4 10
安装规格................................................................................................................... 33 通信口规格............................................................................................................... 34 接线规格................................................................................................................... 35
SIMATIC S7-1500 ET 200MP 自动化系统 系统手册说明书

SIMATICS7-1500/ET 200MP 自动化系统系统手册01/2023A5E03461186-AKSiemens AG Digital Industries Postfach 48 48 90026 NÜRNBERG 德国Ⓟ 02/2023 本公司保留更改的权利Copyright © Siemens AG 2013 - 2023.保留所有权利法律资讯警告提示系统为了您的人身安全以及避免财产损失,必须注意本手册中的提示。
人身安全的提示用一个警告三角表示,仅与财产损失有关的提示不带警告三角。
警告提示根据危险等级由高到低如下表示。
危险表示如果不采取相应的小心措施,将会导致死亡或者严重的人身伤害。
警告表示如果不采取相应的小心措施,可能导致死亡或者严重的人身伤害。
小心表示如果不采取相应的小心措施,可能导致轻微的人身伤害。
注意表示如果不采取相应的小心措施,可能导致财产损失。
当出现多个危险等级的情况下,每次总是使用最高等级的警告提示。
如果在某个警告提示中带有警告可能导致人身伤害的警告三角,则可能在该警告提示中另外还附带有可能导致财产损失的警告。
合格的专业人员本文件所属的产品/系统只允许由符合各项工作要求的合格人员进行操作。
其操作必须遵照各自附带的文件说明,特别是其中的安全及警告提示。
由于具备相关培训及经验,合格人员可以察觉本产品/系统的风险,并避免可能的危险。
按规定使用 Siemens 产品请注意下列说明:警告Siemens 产品只允许用于目录和相关技术文件中规定的使用情况。
如果要使用其他公司的产品和组件,必须得到 Siemens 推荐和允许。
正确的运输、储存、组装、装配、安装、调试、操作和维护是产品安全、正常运行的前提。
必须保证允许的环境条件。
必须注意相关文件中的提示。
商标所有带有标记符号 ® 的都是 Siemens AG 的注册商标。
本印刷品中的其他符号可能是一些其他商标。
EN8F202_v1.3

EN8F202
用户参考手册 Version1.4 July 1, 2015
The Information provided by ENROO Electronics is believed to be accurate and reliable. However, ENROO Electronics assumes no responsibility, for possible errors or omissions, or for any consequences resulting from the use of the information contained herein. ENROO Electronics reserves the right to change this documentation without prior notice.
4. 特殊功能寄存器..................................................................................................................................9
4.1. STATUS-状态寄存器:(03H)............................................................................................................................. 9 4.2. OPTION-选项寄存器:(N/A)......................................................................................................................... 10 4.3. GPIO-端口寄存器:(06H)............................................................................................................................... 11 4.4. PBPH-上拉控制寄存器:(05H)........................................................................................................................11 4.5. CPIO-I/O 端口寄存器:(06H).......................................................................................................................11 4.6. SCKR-系统时钟以及看门狗配置项:(07H).................................................................................................. 11
vmotion
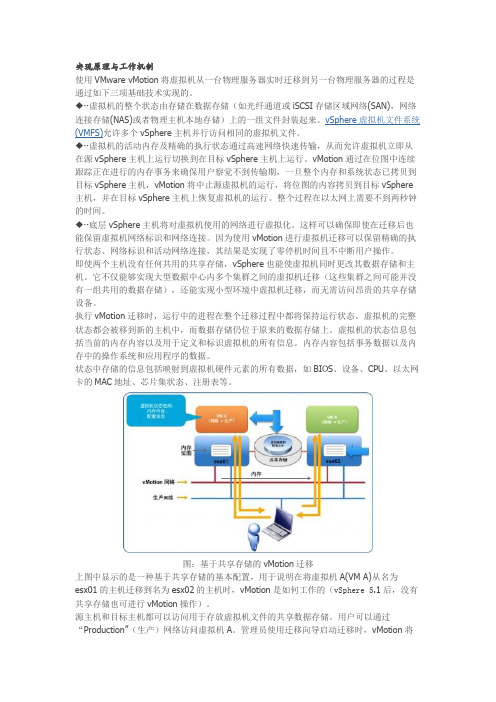
实现原理与工作机制使用VMware vMotion将虚拟机从一台物理服务器实时迁移到另一台物理服务器的过程是通过如下三项基础技术实现的。
◆∙∙虚拟机的整个状态由存储在数据存储(如光纤通道或iSCSI存储区域网络(SAN),网络连接存储(NAS)或者物理主机本地存储)上的一组文件封装起来。
vSphere虚拟机文件系统(VMFS)允许多个vSphere主机并行访问相同的虚拟机文件。
◆∙∙虚拟机的活动内存及精确的执行状态通过高速网络快速传输,从而允许虚拟机立即从在源vSphere主机上运行切换到在目标vSphere主机上运行。
vMotion通过在位图中连续跟踪正在进行的内存事务来确保用户察觉不到传输期,一旦整个内存和系统状态已拷贝到目标vSphere主机,vMotion将中止源虚拟机的运行,将位图的内容拷贝到目标vSphere主机,并在目标vSphere主机上恢复虚拟机的运行。
整个过程在以太网上需要不到两秒钟的时间。
◆∙∙底层vSphere主机将对虚拟机使用的网络进行虚拟化。
这样可以确保即使在迁移后也能保留虚拟机网络标识和网络连接。
因为使用vMotion进行虚拟机迁移可以保留精确的执行状态、网络标识和活动网络连接,其结果是实现了零停机时间且不中断用户操作。
即使两个主机没有任何共用的共享存储,vSphere也能使虚拟机同时更改其数据存储和主机。
它不仅能够实现大型数据中心内多个集群之间的虚拟机迁移(这些集群之间可能并没有一组共用的数据存储),还能实现小型环境中虚拟机迁移,而无需访问昂贵的共享存储设备。
执行vMotion迁移时,运行中的进程在整个迁移过程中都将保持运行状态。
虚拟机的完整状态都会被移到新的主机中,而数据存储仍位于原来的数据存储上。
虚拟机的状态信息包括当前的内存内容以及用于定义和标识虚拟机的所有信息。
内存内容包括事务数据以及内存中的操作系统和应用程序的数据。
状态中存储的信息包括映射到虚拟机硬件元素的所有数据,如BIOS、设备、CPU、以太网卡的MAC地址、芯片集状态、注册表等。
OMRONPLCEView触摸屏编程使用说明书
OMRONPLCEView触摸屏编程使用说明书DMP-300F型中小型水电站触摸式机组自动化屏(OMRON PLC +EView 触摸屏)编程使用讲明书文件编号:HN/QF.13-0002-004版本号: A发放编号:持册人:长沙华能自控集团有限公司目录1.OMRON CJ1M系列PLC介绍 (3)1.1.CPU单元(使用CJ1M-CPU13) (3)1.2.通信单元(使用CJ1W-SCU41) (8)1.3.I/O单元 (8)1.4.模块安装及地址分配 (9)2.OMRON PLC常用编程指令 (9)2.1.梯形图指令 (9)2.2.位元(B IT)操纵指令 (9)2.3.终止指令(END) (10)2.4.定时器和计数器指令 (10)2.5.数据移位元元元指令 (11)2.6.数据传送指令 (11)2.7.数据比较指令 (13)2.8.数据转换指令 (14)2.9.BCD码运算指令 (14)2.10.二进制元运算指令 (17)2.11.逻辑指令 (17)2.12.子程序和中断操纵指令 (18)2.13.串行通信指令(PMCR) (19)3.OMRON PLC程序编辑软件 (20)3.1.CX-P ROGRAMMER中对PLC的初始化设置 (20)3.2.PLC设定 (20)3.3.CX-P ROGRAMMER中对PLC的联机操作 (21)3.4.程序中各个子程序的用途定义 (21)4.OMRON PLC通信程序编辑软件 (22)4.1.与PLC通信单元箱地址设定 (22)4.2.4-2PLC协议编制软件(CX-P ROTOCOL)通信口设定 (23)4.3.PLC协议编制软件使用简单讲明 (23)4.4.PLC与单元箱通信协议注意事项: (24)5.EASYVIEW触摸屏程序编辑软件 (24)5.1.与OMRON PLC连接参数设定 (24)5.2.一样参数设定(通过“编辑――系统参数的一样页进行设定) (24)5.3.组件功能讲明 (25)5.4.触摸屏程序的下载 (28)5.5.触摸屏程序调试 (28)6.水机屏PLC程序资料寄存器分配 (29)6.1.PLC内部时钟存放区(D0~D6) (29)6.2.PLC事故资料中转区(D10~D19) (29)6.3.发生的水机操作、故障、事故报警个数存放区(D20): (29)6.4.水机状态(遥信量)存放区(D21~D30): (29)6.5.PLC事故存放区:(D4000~D5999)共存放200条事故资料 (30)6.6.PLC与单元箱通信辅助中间寄存器: (30)6.7.PLC与单元通信中断判定辅助寄存器: (30)6.8.PLC与HMI(触摸屏)间固定使用寄存器: (31)6.9.触摸屏及后台操作定义(无专门要求) (32)7.触摸屏模拟量显示设定 (32)8.OMRON PLC通信协议 (34)8.1.PLC使用 (34)8.2.对时使用 (35)8.3.单元箱使用 (35)8.4.PLC通信协议接线图 (39)1.OMRON CJ1M系列PLC介绍当前水机自动化屏大多使用OMRON CJ1M系列PLC,这种PLC为模块式,而且没有底板。
三菱QCPU(Q系列) QnACPU编程手册(PID控制指令篇)

© 1999 三菱电机
A-3
前言
非常感谢您选购了三菱通用可编程控制器的 MELSEC-Q/QnA 系列。 请在使用之前熟读本书,在充分理解-Q 系列可编程控制器的功能、性能的基础上正确地加以使用。 应确保将本手册交给最终用户。
安全注意事项 ...........................................................................A - 1 修订记录 ...............................................................................A - 3 目录 ...................................................................................A - 4 关于本手册 .............................................................................A - 6
需要了解的多核CPU运行模式
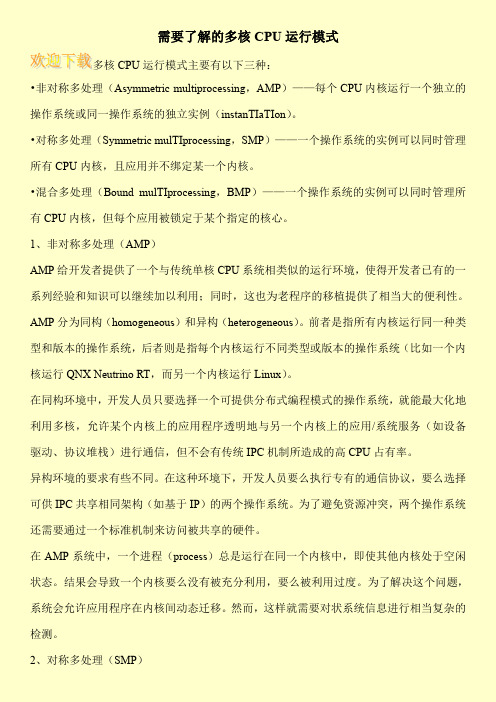
需要了解的多核CPU运行模式多核CPU运行模式主要有以下三种:•非对称多处理(Asymmetric multiprocessing,AMP)——每个CPU内核运行一个独立的操作系统或同一操作系统的独立实例(instanTIaTIon)。
•对称多处理(Symmetric mulTIprocessing,SMP)——一个操作系统的实例可以同时管理所有CPU内核,且应用并不绑定某一个内核。
•混合多处理(Bound mulTIprocessing,BMP)——一个操作系统的实例可以同时管理所有CPU内核,但每个应用被锁定于某个指定的核心。
1、非对称多处理(AMP)AMP给开发者提供了一个与传统单核CPU系统相类似的运行环境,使得开发者已有的一系列经验和知识可以继续加以利用;同时,这也为老程序的移植提供了相当大的便利性。
AMP分为同构(homogeneous)和异构(heterogeneous)。
前者是指所有内核运行同一种类型和版本的操作系统,后者则是指每个内核运行不同类型或版本的操作系统(比如一个内核运行QNX Neutrino RT,而另一个内核运行Linux)。
在同构环境中,开发人员只要选择一个可提供分布式编程模式的操作系统,就能最大化地利用多核,允许某个内核上的应用程序透明地与另一个内核上的应用/系统服务(如设备驱动、协议堆栈)进行通信,但不会有传统IPC机制所造成的高CPU占有率。
异构环境的要求有些不同。
在这种环境下,开发人员要么执行专有的通信协议,要么选择可供IPC共享相同架构(如基于IP)的两个操作系统。
为了避免资源冲突,两个操作系统还需要通过一个标准机制来访问被共享的硬件。
在AMP系统中,一个进程(process)总是运行在同一个内核中,即使其他内核处于空闲状态。
结果会导致一个内核要么没有被充分利用,要么被利用过度。
为了解决这个问题,系统会允许应用程序在内核间动态迁移。
然而,这样就需要对状系统信息进行相当复杂的检测。
VMware是什么
目录VMware是什么 (2)认识VMware (2)VMware产品: (2)VMware工作站(VMware Workstation) (2)VMware Player (3)VMware服务器(VMware Server,旧称为VMware GSX Server) (3)VMware ESX服务器 (3)VMware ESXi 服务器 (4)VMware vSphere(Former VMware Infrastructure) (4)数据中心 (4)其它产品 (4)描述 (4)实现 (5)特点 (6)VMware虚拟机入门知识 (6)一、VMware 的特点 (6)二、VMware的运行原理 (7)三、vmware的系统要求: (8)四、主机的系统要求: (8)VMware是什么VMware是一家来自美国的虚拟软件提供商,也是全球最为著名的虚拟机软件公司,目前为EMC公司的全资子公司,成立于1998年,公司总部位于美国加州帕罗奥多Hillview大道3401号。
VMware所拥有的产品包括:VMware Workstation(VMware工作站)、VMware Player、VMware服务器、VMware ESX服务器、VMware ESXi 服务器、VMware vSphere、、虚拟中心(VirtualCenter)等等。
我们最为熟悉和了解的即VMware Workstation,或称VMware虚拟机,目前最新版本为VMware 7.0。
认识VMware相信不少网友已经使用VMware虚拟机不短的时间了,尤其是VMware Workstation,这款易用且强大的软件给我们在软件测试以及病毒测试等方面带来了很多的方便。
今天就从wiki转来VMware的详细介绍,让网友更好的了解这款强大的软件。
VMware公司成立于1998年,总部位于美国加州帕罗奥多Hillview大道3401号,属于上市公司。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1,三菱Q系列PLC CPU与Q173可组成多CPU系统,Q173是三菱公司开发的控制多轴伺服电机的专用CPU。
该CPU只用使用三菱网络型的伺服电机,网络模式:SSCNETⅠ;SSCNET
Ⅱ;SSCNETⅢ
2,Q173 CPU,Q172 CPU又被称为MOTION CPU;Q173CPU最多可控制32轴的伺服;Q172CPU 最多可控制8轴;(以下都称MOTION CPU)
3,Motion CPU是单独的控制单元;可独立构成系统;与PLC CPU组成多CPU系统时,可设置一个互相刷新的数据区域。
MOTION CPU的控制方式分为实模式和虚模式,以下方法是适合实模式。
关于虚模式以后文档再行讲述
4,构建多CPU系统,需要GX-Devoeloper与MT-Devoeloper区同设置;下面介绍GX-Devolper 端的介绍,GX-Devoeloper的软件版本必需要为8.52以上
5,在刷新设置里面可以具体的去配置,数据刷新的点数和数据区域;如下图:是PLC CPU 的刷新区;
6,
7,这些数据区域对应的Motion CPU里的地址名称
M10000-M10799共800个BIT;对应MOTION CPU#1的M3200-M3999; M14000-M14799对应MOTION CPU#2的M3200-M3999
R1900-R1999共100WORD对应MOTION CPU#1 D640-D739;R13900-R13999对应MOTION CPU#2的D640-D739
R0-R1599共1600个WORD对应MOTION CPU#1的D2000-D3599;R12000-R13599对应MOTION CPU#2的D2000-D3599
M12000-M12799共800bit 对应MOTION CPU#1的M6000-M6799;M16000-M16799对应MOTION CPU#2的M6000-M6799
下图是MOTION CPU#2端设置截图:
8,PLC CPU与3号CPU的数据刷新截图
9,PLC CPU M14800-M15439共640点对应MOTION CPU#2的M2400-M3199
10,设置好PLC CPU与MOTION CPU后来看MOTION CPU的特殊寄存器;
制伺服马达,当然在控制前请先在MR-Configurator里设置好伺服的运行参数,如(如刚性,增益);另外还需要在MT-Developer里设置好电子齿轮比,回原点方式,单位等等参数)此处不再详呈。
下面着重介绍MOTION CPU里的SFC程序和PLC程序来控制伺服电机的启动和停止,以及JOG等等程序的写法。
1,在MOTION CPU里面,回原点就是直接可以在SEVRO PRAGAMER里面写一条ZERO AXIS 1就可以对轴1进行回原点,回原点的方式,需要在MT DEVELOPER 里面另行设置。
回原点的程序也需在MOTION SFC里面写
2,MOTION CPU,需要控制第1轴执行位置模式,至1个POSITION.SFC程序如下:
说明:前面F202,是初使化,用作将条件复位。
在该例子里,F202是复位M6800,M6802,M6804
G200这一竖例是第1个位置的定位;G200是第1个位置启动的条件;G200里的内容是M2001闭点,M2407闭点,M2408闭点,M6000开点,M6002的闭点,如下图:
再往下K1,K50.
K1是回原点的M代码;也就是是述条件达到,轴1开始回原点。
轴1回到原点后执行
下例程序:
F200,将M6800置位!G202如果M6000断开,则跳转下一步:
如下图:所有完成,复位6800,然后结束跳回第1步!
G205这一竖例则是一个位置定位的指令;G205同样是条件,K50则是指定了伺服电机的位置,速度,加减速时间,和M代码,以及加减速方法,伺服电机的定位模式,如下图:
上述讲述了MOTION CPU里的SFC的写法。
下面,则对应的PLC CPU里如何写。
该例子,我是选用了MOTION CPU#2的第1个轴。
所以我们要把需的寄存器先对应过来;注:(学习MOTION CPU一定要注意,MOTION CPU里面的寄存器与PLC CPU里面的寄存器是不一样的,是完全独立的。
比如说PLC CPU里的M2400和MOTION CPU#1,MOTION CPU#2的M2400是不同的地址,这点千万不能搞混。
)
3,按照上述对应关系,PLC CPU 的M14000对应了MOTION CPU#2的第1轴的停止指令M3200.
那么在PLC里面如果要停止该轴。
则需将M14000置为ON,如下图:
依次类推:如果需要JOG,则需要对M14002,M14003进行置为ON .
4,如果要执行定位指令,则需要注意,MOTION CPU SFC有两种运行方法;一种是自动运行方法,一种是手动运行方法。
方法不同PLC写程序的方法也不同。
如下图,MOTION SFC的截图,AUTO MODE全部设为NO。
所以这里PLC写程序就应该按照手动运行的方法去写
PLC手动运行MOTION SFC程序如下:
需要写DP.SFCS H3E2 K1 M565 D10101这样一条指令来对应MOTION CPU的手动运行模式,如果设置为了自动模式。
则只需要将M16000置位就可以运行定位了!
本次MOTION CPU与PLC CPU 组成多系统作了一个简单的描述。
通过实例来说明了程序的写法。