EPS助力模式切换及其控制方法
EPS助力补偿控制策略的研究

EPS助力补偿控制策略的研究姜平;祖春胜;赵林峰【摘要】文章分析了电动助力转向(electric power steering,EPS)系统各部分的动力学模型,并由此搭建了其Simulink仿真模型;对于时变性、非线性较强的EPS系统,采用了单神经元自适应PID(single neuron self-adaptive PID,SNPID)控制算法;针对一般助力特性曲线下EPS系统动态响应特性较差的问题,提出了在转矩传感器检测的转矩之中加入相位超前补偿、应对路面冲击的转矩微分补偿、减轻转向系统摩擦对系统影响的摩擦补偿、改善快速转向或换向时电机助力的迟钝和驾驶员"顿挫"感的惯性及阻尼补偿;并在上述补偿的基础上,针对原地撒手抖动问题提出了基于转矩变化率的助力死区增大控制方案.仿真和实车试验结果表明,加入补偿控制的EPS助力策略的动态响应特性和转向轻便性均得到了改善.%The dynamic models of electric power steering(EPS) system components are analyzed, with which the simulation model based on Simulink is established.For EPS system with stronger time-varying and nonlinear characteristics, the single neuron self-adaptive PID(SNPID) control algorithm is adopted.Concerning the poor dynamic response characteristic of the EPS system under general assist characteristic curve, compensatory torques are added to the detected torque of the torque sensor including the phase-lead compensation, the differential compensation which is used to deal with road shocks, the friction compensation which is used to reduce the impact on system from the friction of steering system and the inertia and damping compensation which is used to improve the insensitive performance of motor and the lock feeling of driver when fast turning orreversing.On the basis of the compensation above, in order to solve jitter in situ after relinquishing hands on steering wheel, a control scheme of enlarging the assist dead zone based on rate of torque change is put forward.The results of simulation and vehicle experiment show that the dynamic response characteristic is improved and the steering behavior is easier when the compensation control is contained in EPS assistance strategy.【期刊名称】《合肥工业大学学报(自然科学版)》【年(卷),期】2017(040)001【总页数】7页(P12-17,30)【关键词】电动助力转向(EPS);单神经元自适应PID控制;助力补偿;转向轻便性;路感【作者】姜平;祖春胜;赵林峰【作者单位】合肥工业大学机械工程学院,安徽合肥 230009;合肥工业大学机械工程学院,安徽合肥 230009;合肥工业大学机械工程学院,安徽合肥 230009【正文语种】中文【中图分类】U463.44电动助力转向(electric power steering,EPS)是世界汽车技术发展的研究热点和前沿技术之一[1],它能够保证汽车的安全性和稳定性,因此受到越来越多汽车厂商的青睐。
eps 助力控制策略和测试研究分析

车辆工程技术9车辆技术EPS 助力控制策略和测试研究分析段金萍(长城汽车股份有限公司,河北 保定 071000)摘 要:伴随汽车行业的日益发展,人们对转向功能的要求日益增高。
EPS 系统油耗低、运作时间短,凭借可控的助力系统性能日益受到人们的关注。
笔者探讨了EPS 系统的控制策略,根据常规PID、电机补偿机制、扭转力矩变化率等策略,并根据与样车的对比测试,得出该策略符合行业标准,顺应了汽车行业的发展大趋势。
关键词:EPS 助力控制;测试研究分析;大趋势0 引言 近年来,我国汽车需求量不断增加,汽车行业也正处于迅猛发展的态势,在需求量不断上升的同时,消费者也对汽车的质量提出了更高的要求,驾车体验也逐渐要求汽车的能耗低,性价比高,性能强。
最近一段时间,我国新能源汽车行业发展迅速,传统意义上的转向系统包括机械和液压都已无法满足现阶段消费者的需求。
在如此背景之下,EPS 即电子助力转向系统应运而生。
1 电子助力转向系统(EPS)概述 所谓EPS,其实是英文Electric Power Steering 的缩写,即电子助力转向系统。
汽车的发展历史上,转向系统从最初的机械到液压再到电控液压,最后来到了电子助力转向系统。
相比于传统的动力转向系统,电子助力转向的特征优势体现于以下两个方面: (1)油耗低,运作时间短。
通常的液压助力转向系统,无论汽车是否在行进过程中出现转向,它都在运作,都会消耗发动机动力,然而电子助力转向系统则不会这样,它只会在转向时运作,非转向时不消耗动力。
因此,可以有效降低汽车燃油消耗。
(2)驾车时适应性强,助力大小可控。
传统的液压助力转向系统,其所提供的转向助力无法随车速的变化而变化。
换句话说,如果当驾驶员在高速公路上行进时,转向动力小,就会出现转向困难,车辆的整体稳定性不强,驾驶员也缺少安全感。
然而,在电子助力转向系统下,车辆的转向适应性更强,车辆低速时,转向助力较大,车辆高速时,转向助力小,更有利于驾驶员的把控,提升车辆稳定性。
EPS的控制(特许公报)

EPS的控制译自特许公报(日)昭 61-2750581986年12月5日转向回正时,电机在轮胎自动回正转矩的作用下,即在外面逆向转矩的作用下,使电机电枢反转,处于发电状态。
此时电机的电磁力矩变成回正转矩的阻尼,影响了车轮的回正性,使转向盘回正迟缓。
特别是在转向盘快速回正时,电机的转速越高,发电的作用越大,阻尼越大,转向盘的回正越不平滑。
其次在车辆高速行驶快速回正时,往往需要电机正向驱动来减少转向盘回到中间位置的超调量,故而存在应该对电机提供多大电流的问题本文的目的是当电机的输出转矩无需加在操舵力上时,使电机的电流变为最小,即限制向电机提供电流,借此改善回正性,提高响应性。
转向操作时,控制器根据输入转矩和车速的电压信号,对电机进行输出助力转矩的控制,限制向电机输入最大电流,即最大输出助力转矩。
当转向盘上施加大操舵力时,控制器向电机输入大电压,电机输出的助力转矩也大;而操舵力小时,输入小电压,助力转矩也小。
电机以输入转矩为驱动条件,无转矩输入时,即当转向盘没有施加操舵力时,电机的输出助力转矩为零。
按此方法,控制器在变换回路中进行电信号的处理。
所以,由车轮自动回正转矩进行回正时,没有必要在转向盘上施加操舵力。
转向盘在撒手状态下,输入转矩近似于零,故电机的输入电压为零,输出的助力转矩也是零。
此时,电机在外力的作用下,可以自由地旋转,从而改善了回正时的响应性,提高了操纵性和稳定性。
图1是本文提出的电机控制流程框图。
它由检测控制物理量的检测回路100,将物理量变为电信号的变换回路110和输出控制电机信号的驱动回路80所组成。
转向操作时的输入转矩,由设置在转向轴上的转矩传感器20测出,并输送至转矩信号处理器回路0。
转矩处理信号30,如图2(a)所示,按输入转矩的比例变换成电压信号V1,再输入到连续函数发生回路40。
3一般EPS的补助力值,反映在驾驶员的操舵上,不限于和输入转矩成比例。
因此为了获得最佳操舵感的补助力,把从转矩信号处理回路20输出的电压信号V1变换成V3,如图2(b)所示。
汽车电子与控制技术-5底盘电控系统(eps)

在实际EPS系统上应用设计的控制算法,并进行实验验证。通过实验数据的分析和处理,可以进一步 评估控制算法的实际效果和性能表现。同时,实验结果也可以为算法的改进和优化提供有价值的参考 信息。
05 EPS系统性能评价与优化 方向
性能评价指标体系建立
操控稳定性
EPS系统应能够提供稳定的操控 性能,包括转向灵敏度、回正 性能和路感传递等。
排除故障实践案例分享
01
02
03
案例一
一辆汽车出现转向沉重故 障,经过检查发现EPS电 机损坏,更换电机后故障 排除。
案例二
一辆汽车出现转向异响故 障,经过检查发现转向机 构磨损严重,更换转向机 构后故障排除。
案例三
一辆汽车出现转向失灵故 障,经过检查发现EPS控 制模块内部故障,更换控 制模块后故障排除。
07 总结与展望
本次项目成果回顾
实现了底盘电控系统的基本功能
01
在本次项目中,我们成功实现了底盘电控系统(EPS)的基本功
能,包括转向助力控制、稳定性控制、节能控制等。
优化了系统性能
02
通过对EPS系统的优化,提高了系统的响应速度、控制精度和稳
定性,进一步提升了车辆的操控性和安全性。
完成了实验验证
转向异响故障
可能原因有转向机构磨 损、电机轴承磨损、控 制模块内部故障等,导 致转向时产生异常噪音。
转向失灵故障
EPS系统完全失效,方 向盘变得非常沉重且无 法转动,可能原因包括 电机损坏、控制模块故 障、电源故障等。
故障诊断流程和方法介绍
故障诊断流程
首先进行初步检查,包括检查EPS系统电源、保险丝、连接器等是否正常;然后进行系 统自诊断,利用专用诊断仪读取故障代码和数据流;最后根据故障代码和数据流进行故
EPS控制策略研究

电动助力转向系统控制策略研究商研院底盘部转向室2009330摘要:针对汽车电动助力转向系统(EPS),建立其运动方程和控制目标(转向助力参考曲线), 介绍了PID控制、阻尼控制、模糊控制、神经网络控制等几种典型的和先进的控制策略,并对其控制算法和优缺点进行了分析。
关键词:EPS运动方程转向助力曲线控制策略1 引言随着微电子技术的发展及其在汽车领域的广泛应用,电动助力转向系统越来越成为世界汽车技术研究的重点及热点。
本文研究了EPS的助力特性,该系统根据转向盘转矩信号和车速信号确定助力电机的目标转矩,并通过一定的控制策略使得电机施加在转向轴上的助力转矩能快速跟随目标转矩,达到转向助力的目的。
2 EPS动力学数学模型的建立2.1 EPS系统运动分析和模型建立EPS系统的建立是研究其控制策略的一个重要环节。
只有在建立EPS数学模型的基础上,才有可能对其控制策略仿真。
EPS转向系统主要由以下几个部分构成:电子控制单元(ECU)、扭矩传感器、伺服电动机、变速机构、转向管柱。
通过对EPS系统的动力学运动分析,根据牛顿力学原理,建立EPS系统的数学模型。
对管柱输入轴建立运动方程为:Is '^1 - Ks Cs 已二Tf - % 冃(式1)对管柱输出轴建立运动方程为:I z ^2 K^^2 C z 6 二G T d T f 壬(式2)传感器模型[2]T f 二© (」2)式3)电动机模型为【5]U — KR eT d =9.55K e(圧)(式4)R式中:9i :管柱扭杆变形量;T f :传感器检测到的驾驶员输入力矩;K a :传感器比例系数;帰u :管柱上芯轴摩擦系数;I s :管柱扭杆的转动惯量;K s :管柱扭杆的刚度系数;C s :管柱扭杆的阻尼系数;伍:转向机扭杆变形量:I z :转向机扭杆的转动惯量;K z :转向机扭杆的刚度系数;C z :转向机扭杆的阻尼系数;T d :电动机输出转矩;G:减速器减速比;⑷d :管柱下传动轴摩擦系数;U :电机电压;R :电枢电阻;K e :反电势系数; & :电机转速;根据系统速度匹配可得:& =G02。
EPS系统助力控制算法研究与仿真

EPS系统助力控制算法研究与仿真首先对EPS系统助力控制过程进行了介绍;然后根据助力曲线特性设计了模糊控制器;研究了电动机目标电流模糊自适应PID控制算法;最后在MATLAB/SIMULINK中建立EPS的仿真模型,并进行了结果验证和分析。
标签:助力曲线;模糊控制器;仿真模型doi:10.19311/ki.16723198.2017.02.090随着现代汽车技术的飞速发展及人们生活水平的提高,人们对汽车转向的操纵性能提出了更高的要求。
汽车转向系统作为重要的组成部分,其性能的好坏直接关系驾驶员驾驶过程中的舒适性、安全性及操纵稳定性。
电动助力转向(EPS),就是在机械转向系统的基础上,以车载蓄电池作为能源,以助力电机为动力,以方向盘转矩和车速为输入信号,通过电子控制单元(ECU)控制,协助人力转向获得最佳转向力的伺服系统。
助力控制是在转向过程中为减轻转向盘的操纵力,通过减速结构把电机产生的转矩作用到机械转向系上的一种控制模式。
助力控制主要作用是為减轻驾驶员的操纵力,助力的大小主要取决于所采取的助力特性曲线及助力控制算法。
1 EPS系统助力控制按照汽车转向行驶的不同情况,EPS系统主要有助力控制、回正控制和阻尼模式三种控制模式。
本文主要针对助力控制这种控制模式进行研究。
图1为EPS 系统的助力控制过程,EPS控制单元实时采集方向盘扭矩信号和车速信号,通过内置的助力特性曲线确定电机目标电流,经驱动电路输出PWM控制电机转动,同时ECU采集电机反馈电流,经控制算法对PWM波占空比进行调节后实现对系统的闭环控制。
2 模糊控制器设计通过比较助力曲线的优缺点,采用模糊控制的方法确定助力特性曲线,即建立一个以转向盘力矩Td和车速V为输入,以助力电流Im为输出的模糊控制器来表征助力特性曲线。
该方法易调整、实时性好,下面对助力特性的模糊控制器进行设计。
模糊控制器的建立是为了表述助力特性,所以模糊控制器的输入为转向盘力矩Td和车速V,输出为助力电流Im,模糊控制器包括输入量模糊化、模糊规则推理及输出量反模糊化三步。
P-Eps(PinionElectricPowerSteering)齿轮式电动助力转向系统
P-Eps (Pinion Electric Power Steering) 齿轮式电动助力转向系统EPS,电动助力转向。
也可以叫EPAS。
其最大优点是可以随速控制助力,在低速时提供较大助力,保证轻便转向;在高速时减小助力,提供驾驶员足够的路感。
EPS只在转向时发挥作用,因此不像液压转向会一直对发动机造成额外负担,从而减小油耗,同时没有不可回收件,更加绿色,从各方面满足环保的需求。
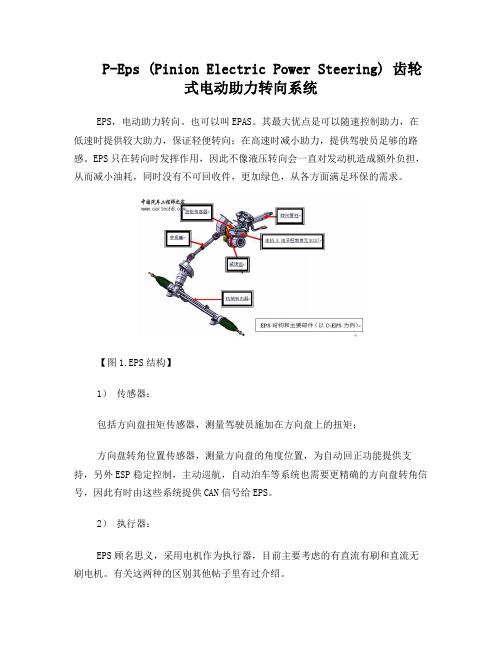
【图1.EPS结构】1)传感器:包括方向盘扭矩传感器,测量驾驶员施加在方向盘上的扭矩;方向盘转角位置传感器,测量方向盘的角度位置,为自动回正功能提供支持,另外ESP稳定控制,主动巡航,自动泊车等系统也需要更精确的方向盘转角信号,因此有时由这些系统提供CAN信号给EPS。
2)执行器:EPS顾名思义,采用电机作为执行器,目前主要考虑的有直流有刷和直流无刷电机。
有关这两种的区别其他帖子里有过介绍。
3)减速机构:电机输出的扭矩经过减速机构加载到转向系统上。
形式有蜗轮蜗杆式,循环球式,差动轮系和摇臂机构等等,前两者比较常见,也跟EPS的形式有关(参见EPS分类)。
4)电子控制单元:EPS的电子控制单元可以跟车上其他部件通信,处理传感器信号,通过程序计算出需要的助力大小,并转换成控制信号输出给驱动电路,驱动电动机输出扭矩。
5)转向机构:跟常规转向机构类似。
EPS的分类:主要分3大类,根据电机在转向机构中耦合位置和方式的不同。
1) C-EPS转向柱式(Column Electric Power Steering):直接在转向柱上安装,可以从常规转向改进而来,简单,成本低;缺点是噪音大,振动不好控制,会直接传到方向盘上,传递扭矩也较小。
2) P-EPS小齿轮式(Pinion Electric Power Steering):结构较紧凑,且提高了系统的刚度;但电子部分工作环境差(安装位置距离前桥近),要求耐温,防水,抗干扰等性能高,提高了成本。
【03】4-2-1电动助力转向系统的控制策略
电动汽车在不同车速下转向时,EPS的控制部件能够通过对助力电机 电流的控制,提供合适的转向助力,这样既减轻了驾驶员的操纵负
担,又能保持一定的路感,同时还可以兼顾车辆低速时的操纵轻便 性和高速时的操纵稳定性,也即是在转向轻便性和路感之间找到1个 合适的平衡点。EPS系统的控制策略和控制算法是EPS系统控制性能 的关键,根据汽车不同转向行驶的状态,助力转回正控制。在车辆原地转向和低速
行驶时,以助力控制为主;车辆中低速行驶时以助力和回正控制为 主;
在车辆高速行驶时,以阻尼控制为主,防止车辆转向过快导致侧滑 和翻车现象的发生。按不同的控制方式,中央处理单元ECU作为EPS 系统的核心部件,将所有的控制策略和算法以软件与数据的形式存 储在微处理器的存储器中。
电动转向助力EPS使用说明书

7.1 诊断故障代码(DTC)的显示 1) 将诊断端子 B2 与电源(蓄电池)负极端子用维修导线连接。 2) 用木楔楔住左右车轮(轮胎),拉起停车制动。 3) 起动发动机(发动机未起动,将显示 DTC22)。 4) EPS 指示灯开始显示所有故障代码,故障代码(DTC)总是从最小的代 码号开始依次显示,每种代码显示 3 次。
2.1.5 方向盘转动速度:10 周/分 ~ 15 周/分
2.2 总成机械性能
2.2.1 动摩擦力矩:≤1.0 N·m
2.2.2 动摩擦力矩波动: ≤0.85N·m
2.3 输入力矩-输出力矩特性(零车速)
测试项目
合格值
评价标准
1.输入力矩-电机电流特性(图 1) (5.9±0.7)N·m-25A 符合合格值;
正常状况下浮空,接电源负极有效 正常状况下浮空,接电源负极有效 电压为 12VDC 的电平信号,高电平有效 峰峰值为 12V 的方波信号或脉冲信号 峰峰值为 12V 的方波信号 电压为 12VDC 的电平信号,高电平有效 电压为 12VDC 的持续供电电源(蓄电池)正 极
B8 电源-
输入
电压为 12VDC 的持续供电电源(蓄电池)负 极
点火线圈上的信号(或电喷 ECU 上的信号),作为发动机转速信号,通过 抑躁器(或其它的电子部件)被传递到 EPS 控制器。 1.5 汽车电动助力转向器有如下优点:
1)效率高。传统液压助力转向系统为机械和液压连接,效率低,一般为 60%~70%;而电动助力转向系统为机械与电机连接,效率较高,可达 90%以上。
-3-
株洲易力达机电有限公司
的旋转方向产生角向位移,使滑块在轴向方向产生移动。这些偏差使滑块在轴 向移动,这些轴向的移动转换为电位器的旋转角度,通过电位器再将旋转角度 信号转变为电压信号并传递到 P/S 控制器。控制器即可接受到方向盘上操作力 大小和方向的信号。 1.3 VSS(汽车速度传感器)
EPS高级功能学习

EPS高级功能学习高级功能也叫ADAS,advanced driving assistance system,里面包含了很多功能,我主要了解了五个,LDW(Lane departure warning)车道偏移预警,LKA(Lane keep assistance)车道保持辅助,APC(Automatic parking control)自动泊车控制,DSR (driver steering recommendation)主动转向干预,DMS(driver model switch)驾驶模式切换。
不过在学习具体的高级功能之前,需要了解作为高级功能的执行器的EPS,(electronic power steering)电动助力转向。
如上图所示,在我的理解中,它是方向盘和轮子之间复杂的传动机构,辅以电动机助力,同时需要一个ECU作为控制单元。
从控制的角度讲,分为转矩控制和转角控制。
要说清楚这个,首先要明白控制的本质,或者说自动控制的本质,它是一种偏差控制,控制的目的是消除偏差,控制的效果可以从响应时间,超调量,稳态误差这三个角度去分析。
具体到eps上面来说就是,输入轴和输出轴之间的旋转方向出现偏差,ECU根据此时的车速信号和发动机转速,以及助力特性曲线的要求,输出pwm波来控制电机电压从而调节电机转速,通过皮带传动到蜗杆上,实现助力。
这里忍不住想多说一句话,我本科毕设做的就是SVPWM,空间矢量脉宽调制,题目是轨道交通用直线电机的开绕组控制,当时为了抑制所谓的零序电流,我整了一套非常复杂的开关顺序,现在看来并没有啥意义,但是对于理解很多概念还是有帮助的。
借用知乎上面的图。
在这个基础上,我开始了高级功能的学习。
ldw的功能通过状态机的状态切换来实现切换,激活还是不激活,暂时故障还是永久故障。
ldw请求信号来自上位机,激活条件主要是去检测车速和手力,当驾驶员的手力超过一定值的时候就会立即退出ldw,在这个基础上还有一种策略,对于超过手力的持续时间进行检测。
商用车EPS助力控制策略的研究

商用车EPS助力控制策略的研究作者:孟彬来源:《科技信息·下旬刊》2018年第09期摘要:电动助力转向系统(electric power steering,EPS)已被广泛应用于乘用车上。
与液压助力转向系统相比,EPS 具有助力特性可调、转向跟随性好、燃油消耗低和无污染等优点,故已逐渐进入商用车领域。
但由于商用车具有总质量大、质心高、转向桥载荷大,转向系统多采用循环球式转向器等特点,因而商用车与乘用车的EPS 在结构和性能上有很大区别,应根据商用车的特点设计其EPS 的参数和控制策略。
关键词:商用车;EPS助力;控制策略电动助力转向系统(EPS)是在机械式转向系统的基础上加装电机驱动单元构成的,其主要目的是提供助力、改善汽车转向性能、协助驾驶员完成转向操作。
EPS 系统相对于传统的液压助力转向(HPS)系统有能耗小、污染少、节油、省空间等一系列优点,应用日益广泛。
一、概述目前电动助力转向系统主要应用于齿轮齿条式转向器,而轻中型商用汽车采用循环球式转向器,乘用车所用的通用助力方式不适用于轻中型商用汽车,需要针对轻中型商用汽车的循环球式转向机设计新型的电机助力传动耦合机构。
这种机构在轻量、简单的基础上可稳定、可靠、持续的传递电机助力到转向轮;同时要考虑双前轮转向时运动及助力的协调配合。
根据这种助力方式,可以对传动耦合机构进行结构设计。
设计助力传动耦合机构的基本原理是减小转向功,考虑到转向功是转向力和转向角之积,因此,减小转向功可分两种途径:一是减小转向力;二是减小转向角。
前者的原理是通过提供一个转向助力来直接减小转向力,可采用蜗轮蜗杆助力传动机构方案;后者的原理是通过提供另外一个运动,此运动与转向运动合成后可减小转向角度,可采用差动轮系助力机构方案。
关于转向助力特性曲线,可能出于技术保密要求,国内外还没有文献专门对此进行研究,只在控制系统设计中附带提及。
对商用汽车电动助力转向系统中助力特性曲线的研究基本处于空白:(1)商用汽车在不同载荷、不同车速下的转向特性,特别是双前桥转向系统的转向特性是当前商用汽车性能研究的空白区域;(2)车速对助力增益的影响不清楚;(3)助力特性曲线确定的理论依据不明确,没有明确指出所采用的助力特性曲线到底对汽车的转向路感、操纵稳定性有没有影响;(4)如何根据转向轻便性、转向路感综合确定转向助力特性曲线还没有研究过。
EPS转向手感模式切换及其控制方法

本 田公 司 曾 提供 了 一 种 电动 动 力 转 向装 置 , 控 制 装置 在切 换 控 制 模 式 时 ,从 基 于 与 以前 的控 制模 式对 应 的 映 射 的控 制 值 ,向 基 于 与 新 的控 制 模 式 对应 的 映射 的控 制值 逐 渐 转移 。奇瑞 汽 车 提出了一种变角传动 比的方法 ,当进行转 向操作 时 ,转 向控 制 中央 ECU从 CAN总线上 提取算 , 确定角传动比 J。现代起亚提 出了一种转 向系统 及其 控制 方法 ,所述转 向系统包 括 :运 动模式选 择/释放 开关 、转 向控 制 部 分 ,转 向控 制 部 分 响 应 于来 自运动模式选择/释放开关的信号而改变存 储在 转 向模 式 映射表 中的转 向模 式 j。
【关键词 】 EPS 转 向手感
doi:10.3969/j.issn.1007-4554.2016.07.10
0 引 言
电动助 力转 向系统 EPS具有 节 能 、环 保 、助 力 随速可调等优点 ,正在逐渐取 代传统液压转 向系 统 ,当前市场上部分车型 已将 EPS作为标配 。大 多数 的 EPS仅能提供一种转 向手感 ,而广大驾驶 员的转 向手感需求 却存在较大差异 。例如 ,女性 驾驶员普遍臂力较小 ,希望车辆转 向时 EPS提供 的助 力 多一 点 ;然而 男 性 客 户 开 同一 辆 车 时 ,若 手 上转 向感 觉 太 轻 ,他 们 会 觉 得 方 向盘 轻 飘 飘 ,车 辆 操纵 感 缺 失 。停 车 工 况 下 ,驾 驶 员 需 要 在 车 辆 低 速状态倒车入 库或靠边停 车 ,由于低 速状态转 向 时路 面与轮胎 间的摩擦力 大 ,导致 驾驶员所需 的 力矩 大 ,因此 很 多 客 户 希 望 停 车 转 向 过 程 中手 感 轻一 点 ,行驶 过 程 中 能稳 重 一 点 保 持操 纵 感 觉 ,因 此单 一 的 EPS转 向手 感 已无 法 满足 广 大 客户 的需 求 ,需 要 EPS支 持 转 向手 感模 式 可选 ,由驾 驶 员 自 主选择转向手感模式来解决此问题 _1 ]。
EPS控制技术 施国标

齿轮齿条式转向器
与其它ECU进行信号传递 CAN/LIN总线、K线
电动助力转向控制器硬件组成
微处理器(MCU):单片机(8位/16位/32位)、DSP 外部信号接口电路:转向盘转矩/转角、车速、发动机转速等 内部信号检测电路:电动机的电流/电压 电源电路:信号电源、功率电源 驱动电路:继电器驱动、状态灯驱动、电机驱动
直线型助力特性助力特性曲线族的确定步骤
第一步: 确定助力增 益系数
第二步: 确定典型车 速的车速感 应系数
第三步: 拟合车速感 应系数方程
第四步: 确定助力特 性曲线族
满足 转向轻便性
满足 路感的要求
助力特性的理论设计
方法一
第一步:应用大型多体商用软件 建立整车动力学模型 转向系统模型 前悬架模型 后悬架模型 轮胎模型 传动系模型
直线型助力特性的函数表达式
⎧0 ⎪ I m = ⎨ K v (V ) ⋅ K ai ⋅ (Td − Td 0 ) ⎪I ⎩ max 0 ≤ Td < Td 0 Td 0 ≤ Td < Td max Td ≥ Td max
I max I/A
V=0
V=V max T d0 T d/ N·m Tdmax
助力特性的理论设计
电动助力转向的助力控制
转向盘扭矩Td 相位 补偿
Tdc
基本助力 摩擦补偿
车速V 惯性补偿
Icmd
e
电流 控制器
u
电动机
Tm
Im
电动机转速Vm(估算) 阻尼补偿
助力控制是EPS基本控制模式,主要解决转向轻便性和路感问题。包括基 本助力控制和补偿控制。 基本助力控制不考虑转向时的动态因素,只根据转向盘转矩信号和车速 信号,从事先制定好的基本助力特性表中查取相应的目标助力电流,然后 利用下层控制策略实现对目标电流的跟踪控制。 补偿控制的目的是为了改善汽车转向的动态效果。补偿控制主要包括惯 性补偿控制、转向盘转速补偿控制和摩擦补偿控制。
《EPS系统基本助力控制策略设计案例综述3300字》

EPS系统基本助力控制策略设计案例综述目录EPS系统基本助力控制策略设计案例综述 (1)1.1 EPS系统基本助力控制策略设计 (1)1.2 转矩控制环设计 (2)1.2.1 助力特性曲线 (2)1.2.2 转矩前馈控制器设计 (3)1.3 电流控制换设计 (5)1.3.1 永磁同步电机的矢量控制 (5)1.1.2 永磁同步电机的矢量控制 (7)在第三章建立的EPS系统模型的基础上,设计了基本助力控制策略。
在EPS 系统中,基础助力控制策略决定了系统的整体性能。
EPS系统的最佳控制策略是实现基本的动力转向功能,以满足低速轻转向和高速平稳转向的要求;同时,EPS系统具有较高的响应速度和较强的转向抖动抑制性能。
提供更舒适、更精确、更具操控性和路感的驾驶体验。
1.1 EPS系统基本助力控制策略设计按照模块化控制的设计思想,设计了EPS系统控制策略,其中包括图1.1中所示的转矩型控制环、电流型控制环。
二大控制环对被控对象构成闭环控制。
这些优秀的转矩控制环设计能够保证系统快速、准确地跟踪驾驶员的转向力矩,从而达到助力的基本要求。
EPS 系统可以有效地抑制EPS 系统的转矩波动,从而减小对驾驶员手感的不利影响,从而使EPS 系统具有良好的路感跟踪性能;优良的电流控制环设计可以提高助力电机的响应速度,减小助力电机的转矩波动。
图1.1 EPS 系统控制策略示意图从图1.1可以看出,转矩控制环的主要输入为速度信号和转矩传感器信号se T 输出为目标转矩信号cmd T 。
其中,电流控制环的主要输入为目标电流,输出为实时马达电流和马达助力力矩ref m T ,其中,实时马达电流meas i 用于电流控制环中的电流反馈控制。
下面将深入研究转矩控制环的设计与优化,它对系统稳定性和转矩波动有很大的影响。
1.2 转矩控制环设计1.2.1 助力特性曲线助力器特征描述的是电机助力转矩随转矩传感器的转矩和速度的变化规律。
为获得良好的转向操纵性能,对助力特性的要求如下:当车速提高时,电动机助力转矩应逐渐减小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引言 现 代 汽车 普 遍配 置电 动 助 力 转 向 系 统 (EPS)或液压 转 向 系 统 (HPS) 二者相比,E P S 转向系统具有节能、环 保 、良好的驾驶性能(原地转向轻盈,方向盘手力随车速增 加 )等优 点,正在逐渐取代传统液压转向系统,当前新上市 车 型 把 E P S作 为 标准 配 置 已 经 占 比 8 5 % 以上。E P S助力 性能应满足以下二个基本要求:一方面是能够在低速时提 供大助力以转向轻便性为主要目标;另一方面在车辆中高 速 行 驶 时 ,应提供小助力或者根本不提供助力,以行驶稳 定和安全性为主要目标[|]。E P S助力曲线从传统的直线型 发展 到折线形,最 终到曲线 型;控制逻辑也分写加入了车 速 、车重、回正、阻尼等控制参数P、3、4、5!。 目前在售车辆上配置的EPS绝大多数只提供一种转 向力,而广大驾驶员的转向力的需求却存在较大差异。在驾 驶同一辆车时,女性驾驶员普遍希望车辆转向力轻一些,然 而男性客户驾驶时,若手上转向力太小,他们会觉得车辆操 纵稳定性差,驾驶信心不足。 因此单一的E P S转向力已无 法满足广大客户的需求,需 要 E P S支持助力模式可选,由 驾驶员根据需求自主选择转向助力式来解决此问题。 本田公司曾提供了一种电动动力转向装置,控制装置 在 切 换 控 制 模 式 时 ,从 基 于 与 以 前 的 控 制 模 式 对 应 的 映 射 的控制值,向基于与新的控制模式对应的映射的控制值逐 渐转移[7]。奇瑞汽车提出了一种在转向管柱上增加可变传 动 比 机 构 来 改 变 角 传 动 比 的 方 法 ,来 实 现 原 地 、中 速 、高速 转 向 力 的 改 变 。当 进 行 转 向 操 作 时 ,转 向 控 制 中 央 E C U 从 CAN总线上提取横摆角速度信号、方向盘转角信号和车 速 信 号 进 行 计 算 ,确 定 角 传 动 比 [8]。现代起亚提 出 了 一 种 转 向 系 统 及 其 控 制 方 法 ,所 述 转 向 系 统 包 括 :运 动 模 式 选 择 / 释 放 开 关 、转 向 控 制 部 分 ,转 向 控 制 部 分 响 应 于 来 自 运 动 模式选择/释放开关的信号而改变存储在转向模式映射表 中的转向模式[9]。 本பைடு நூலகம்文 提 出了 一种 E P S 转向助力模式通过中控大屏的 切 换及其控制方法,并对助力模式切换的总体方案、控制 策 略 、安 全 策 略 及 整 车 标 定 测 试 进 行 了 全 面 介 绍 ,并在凯 翼 X3 实车上进行了 EPS三种模式调教和主客观评价测 试。实现了不同驾驶员在同一辆凯翼X3 自主选择转向助 力 模 式,满足不同驾驶员在驾驶整车时的转向力需求。
图 1 助力模式切换系统原理图 中控信息娱乐系统交互界面示意图如图2 所 示 ,界面 中 设 置 了 三 个 控 件 :舒 适 、经 济 、运 动 。具体 助 力 模 式 驾 驶 员选择任意一个助力模块(默 认 为 经 济 )后信息娱乐系统 发出对应的模式切 换指令,E P S发出当 前模 式状 态 信息 , 娱乐系统根据EPS发出的信息进行对应模式标示显示。
1 E P S 助力模式切换方案 E P S 转向助力模式切换输入方式一般有两种:物理按 键和虚拟按键。物理按键通过一个按键进行助力模式切换 循环控制或多个按键分别控制,本文中介绍的助力模式切 换通过虚拟按键进行控制。E P S助力模式切换系统原理图 如 图 1 所示。凯 翼 X3E P S助力模式切换方案为:在 EPS控 制器中集成转向助力模式判别和执行模块,在中控信息娱 乐系统中开发助力模式切换人机交互界面,E P S 系统和中 控 信 息 娱 乐 系 统 之 间 采 用 C A N 网 络 进 行 通 讯 ,驾驶员在 中控大屏上按照个人需求进行转向助力模式切换。中控信 息娱乐系统界面中设置助力模式切换控件,当驾驶员选中 某 一 模 式 ,中 控 娱 乐 系 统 发 出 模 式 切 换 指 令 至 C A N 网 络 , E P S接收到模式切换指令,综合判断整车状态后切换ECU 内 部 助 力 参 数 ,给 驾 驶 员 提 供 对 应 模 式 的 转 向 助 力 ,同时 E P S发出切换成功信息至CAN网络,中控信息娱乐系统 接 收 E P S信 息 后 ,在界面中显 示对应E P S 转向助力模式 执行标识和切换成功字样3 秒钟。
舒适 转向力轻盈。适用于喜好方向盘力较小
轻
和女性客户。
相 同 工况下E P S 提供的助力相对适中,
2
经济 转 向 力适中。 满足一般用户的日常驾驶
中
需 求 ,该 模 式 为 默 认 模 式 。
相 同 工况下E P S 提供的助力相对较小,
作者简介:郭廷(1979-),男,硕士,工程师,现就职于奇瑞商用车 (安徽)有限公司工程研究院,从事转向系统技术开发 工作。
图 2 中控信息娱乐系统人机交互界面
Internal Combustion Engine & Parts
表 1 转向助力模式定义
序号 助力模式
助力模式定义
方向盘力
相 同 工况下E P S 提供的助力相对较大,
•4 •
内燃机与配件
E P S 助力模式切换及其控制方法
; 郭 廷 黄 巨 成 ;卜万里;张海源
(奇 瑞 商 用 车 (安 徽 )有 限 公 司 商 用 车 研 究 院 ,芜 湖 241009 )
摘要:通 过 在 车 载 娱 乐 信 息 系 统 人 机 交 互 模 块 增 加 E P S 助 力 模 式 切 换 控 制 子 模 块 和 E P S 控 制 器 中 预 置 三 种 助 力 特 性 曲 线 ,实现
了 驾 驶 员 在 三 种 不 同 模 式 的 驾 驶 力 切 换 功 能 ,满 足 不 同 驾 车 人 群 的 驾 驶 感 觉 。 同 时 为 了 驾 驶 安 全 考 虑 ,增 加 了 安 全 控 制 模 块 ,避免驾
驶员随意切换助力模式导致的安全事故。
关键词:E P S ; 多 助 力 模 式 ;切 换