单行蔬菜钵体苗自动移栽机的设计—取苗装置设计
钵苗移栽机栽植机构设计

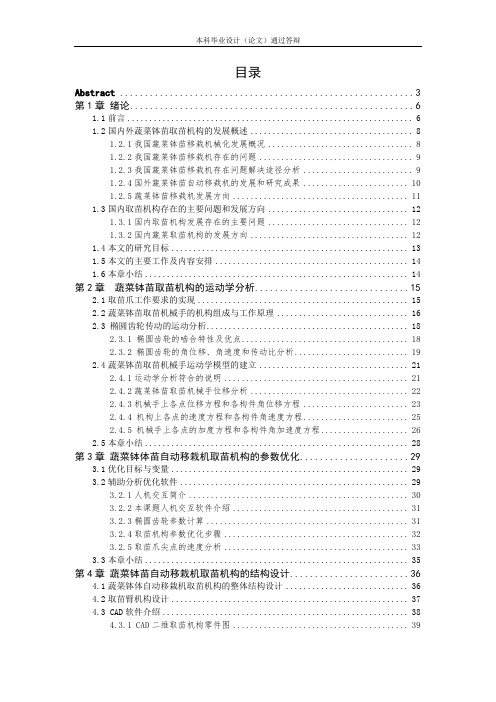
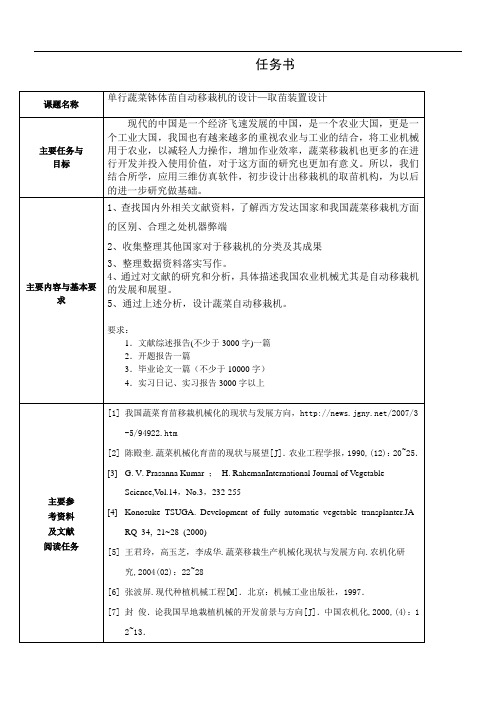
1 . 移 栽 器部 装 ; 2 . 控制爪 ; 3 . 控制板 ; 4 . 控 制 机 构
图 1 栽 植机 构简 图
f 【 V = , c 0 s £
・
( 、 2 )
3 5・
一
圆盘水平 速 度 ;
圆盘 垂直 速度 ;
当钵 苗 满 足直 立条 件 。 则 V x = V — r w s i n w t = O ;
2 . 1 圆盘 直 径 的 确 定
偿 气候 所 带 来 的不 利影 响 因素 ,在 北方 钵 苗 移 栽 技 术得 到 大力 发 展 ,移 栽机 成 为钵 苗 移 栽 技 术 应用 关 键 因 素 ,栽植 机 构作 为 移栽 机 核 心部 件. 决定 着 移栽机 实 用程度 。本 文主要 论述 了移
综 合 已知条 件得 r = l O O m m;
2 . 2 连 接 板 长 度 确 定
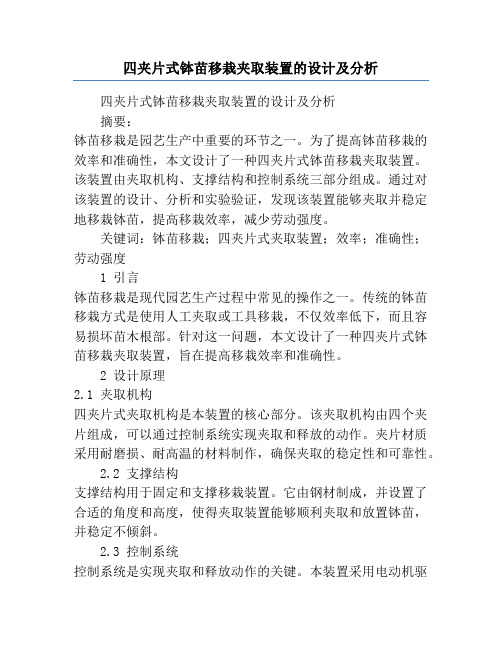
移 栽 器 在整 个移 栽 过 程 中 .必须 保 证 鸭 嘴 始 终垂 直 向下 , 这样 才能保 证 移栽质 量 。 基 于收 获机 扶 禾 原理 。设 计 平 行 四连 杆 机 构。 如 图 3所示 , 需 圆盘偏 心 距离 和连 接板 偏 心 距离 相 等 , 才 能保 证鸭 嘴 与地 面 相 对垂 直位 置 ,
深 度进 行 调整 .从 而实 现 对不 同生长 特 点作 物
进 行移 栽 。
4 结 语
本 栽 植机 构 具 有结 构 简单 、出 现故 障便 于 发现 和修 理等 优点 。经过 多次 试验 , 栽植 机构 能
d l -圆 盘 偏 心 距 离 d 2 一连 接 板 偏 心 距 离
图 3 四连杆 机构
1 . 连接板; 2 . 支撑 杆 ; 3 . 铜 套
油菜机械移栽钵体苗栽植装置设计

油菜机械移栽钵体苗栽植装置设计下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!油菜机械移栽钵体苗栽植装置设计1. 引言随着农业机械化的进步,机械移栽成为油菜等作物种植中的重要环节。
单行蔬菜钵体苗自动移栽机的设计—取苗装置设计
本科毕业设计(论文)通过答辩目录Abstract (3)第1章绪论 (6)1.1前言 (6)1.2国内外蔬菜钵苗取苗机构的发展概述 (8)1.2.1我国蔬菜钵苗移栽机械化发展概况 (8)1.2.2我国蔬菜钵苗移栽机存在的问题 (9)1.2.3我国蔬菜钵苗移栽机存在问题解决途径分析 (9)1.2.4国外蔬菜钵苗自动移栽机的发展和研究成果 (10)1.2.5蔬菜钵苗移栽机发展方向 (11)1.3国内取苗机构存在的主要问题和发展方向 (12)1.3.1国内取苗机构发展存在的主要问题 (12)1.3.2国内蔬菜取苗机构的发展方向 (12)1.4本文的研究目标 (13)1.5本文的主要工作及内容安排 (14)1.6本章小结 (14)第2章蔬菜钵苗取苗机构的运动学分析 (15)2.1取苗爪工作要求的实现 (15)2.2蔬菜钵苗取苗机械手的机构组成与工作原理 (16)2.3 椭圆齿轮传动的运动分析 (18)2.3.1 椭圆齿轮的啮合特性及优点 (18)2.3.2 椭圆齿轮的角位移、角速度和传动比分析 (19)2.4蔬菜钵苗取苗机械手运动学模型的建立 (21)2.4.1运动学分析符合的说明 (21)2.4.2蔬菜钵苗取苗机械手位移分析 (22)2.4.3机械手上各点位移方程和各构件角位移方程 (23)2.4.4 机构上各点的速度方程和各构件角速度方程 (25)2.4.5 机械手上各点的加度方程和各构件角加速度方程 (26)2.5本章小结 (28)第3章蔬菜钵体苗自动移栽机取苗机构的参数优化 (29)3.1优化目标与变量 (29)3.2辅助分析优化软件 (29)3.2.1人机交互简介 (30)3.2.2本课题人机交互软件介绍 (31)3.2.3椭圆齿轮参数计算 (31)3.2.4取苗机构参数优化步骤 (32)3.2.5取苗爪尖点的速度分析 (33)3.3本章小结 (35)第4章蔬菜钵苗自动移栽机取苗机构的结构设计 (36)4.1蔬菜钵体自动移栽机取苗机构的整体结构设计 (36)4.2取苗臂机构设计 (37)4.3 CAD软件介绍 (38)4.3.1 CAD二维取苗机构零件图 (39)浙江理工大学本科毕业设计4.4 Proe软件介绍 (40)4.4.1 三维Proe取苗机构零件图 (41)4.5总装配图 (42)4.6 本章小结 (43)第5章总结与展望 (44)5.1 总结 (44)5.2 进一步的展望 (45)致谢 (46)参考文献 (47)附录 (49)蔬菜钵体苗自动移栽机——取苗装置设计摘要移栽是蔬菜生产过程中的重要环节之一,移栽具有对气候的补偿作用和使作物生育提早的综合效益,可以充分利用光热资源,其经济效益和社会效益均非常可观。
四夹片式钵苗移栽夹取装置的设计及分析
四夹片式钵苗移栽夹取装置的设计及分析四夹片式钵苗移栽夹取装置的设计及分析摘要:钵苗移栽是园艺生产中重要的环节之一。
为了提高钵苗移栽的效率和准确性,本文设计了一种四夹片式钵苗移栽夹取装置。
该装置由夹取机构、支撑结构和控制系统三部分组成。
通过对该装置的设计、分析和实验验证,发现该装置能够夹取并稳定地移栽钵苗,提高移栽效率,减少劳动强度。
关键词:钵苗移栽;四夹片式夹取装置;效率;准确性;劳动强度1 引言钵苗移栽是现代园艺生产过程中常见的操作之一。
传统的钵苗移栽方式是使用人工夹取或工具移栽,不仅效率低下,而且容易损坏苗木根部。
针对这一问题,本文设计了一种四夹片式钵苗移栽夹取装置,旨在提高移栽效率和准确性。
2 设计原理2.1 夹取机构四夹片式夹取机构是本装置的核心部分。
该夹取机构由四个夹片组成,可以通过控制系统实现夹取和释放的动作。
夹片材质采用耐磨损、耐高温的材料制作,确保夹取的稳定性和可靠性。
2.2 支撑结构支撑结构用于固定和支撑移栽装置。
它由钢材制成,并设置了合适的角度和高度,使得夹取装置能够顺利夹取和放置钵苗,并稳定不倾斜。
2.3 控制系统控制系统是实现夹取和释放动作的关键。
本装置采用电动机驱动夹取机构,通过控制器实现夹取和释放的动作。
控制系统还可以根据具体情况调整夹取和放置的力度,保证移栽的准确性和稳定性。
3 设计步骤3.1 夹取力度的确定通过实验测量得到钵苗的平均夹取力度,以此确定夹取机构的设计参数,确保夹取力度适中,既能保持苗木的稳定性,又不会损伤苗木。
3.2 装置尺寸的确定通过对钵苗的尺寸测量得出装置的设计参数,包括夹取机构和支撑结构的尺寸,确保夹取装置能够适应不同规格的钵苗。
3.3 控制系统的设计根据实际需要设计电动机和控制器的参数,确保夹取和释放的动作能够顺利进行。
4 实验与结果分析在设计和制作完成后,我们进行了一系列的实验来验证该装置的效果。
实验结果表明,该装置能够稳定地夹取和放置钵苗,移栽效率明显提高,准确性得到了有效保证,劳动强度也得到了明显减轻。
自动移栽机取苗与栽植装置的设计与优化
自动移栽机取苗与栽植装置的设计与优化自动移栽机取苗与栽植装置的设计与优化摘要:随着农业现代化的推进,自动化设备在种植业中的应用越来越广泛。
本文以自动移栽机的取苗与栽植装置为研究对象,通过分析现有装置存在的问题和瓶颈,对设计和优化进行探讨。
设计出的自动移栽机取苗与栽植装置在实际应用中显示出良好的性能,具有较高的取苗速度和栽植准确度,为农业生产提供了便利。
关键词:自动移栽机;取苗与栽植装置;设计;优化。
一、引言近年来,随着农业生产的迅猛发展,种植业对自动化设备的需求不断增加。
自动移栽机作为一种高效、节约人力资源的设备,已经广泛应用于各种农作物的栽植过程中。
然而,在自动移栽机的取苗与栽植装置方面,仍然存在一些问题,例如取苗速度慢、栽植准确度低等。
为了提高自动移栽机的效率和性能,有必要对取苗与栽植装置进行设计与优化。
二、现有问题与瓶颈分析1. 取苗速度慢:传统的取苗装置采用机械手臂或机械爪进行取苗,操作不够灵活,动作缓慢,不能满足高效栽植的需求。
2. 栽植准确度低:由于传统装置对苗木的定位和栽植精度控制不够精确,导致栽植时苗木易受损或种植不规整。
三、自动移栽机取苗与栽植装置的设计与优化方案1. 设备重构与改进:通过对传统取苗装置的结构进行优化,将机械手臂或机械爪替换为高速取苗器。
高速取苗器采用真空吸附技术,能够快速而精确地取出苗木,提高了取苗速度和准确度。
2. 控制系统升级:采用先进的传感器和控制技术,对苗木的定位和栽植过程进行实时监测和控制。
通过精确控制苗木的位置和角度,保证苗木在栽植过程中不受损且栽植精度高。
3. 优化植物培养基:培养基是苗木生长的关键,可以通过选择合适的培养基成分和比例,提高苗木的生长速度和质量,减少栽植后的成活率。
四、实验结果与分析将设计优化后的自动移栽机取苗与栽植装置进行实验验证。
实验结果表明,该装置在取苗速度和栽植准确度方面有明显的改善。
通过对比分析,发现优化后的装置比传统装置取苗速度提高了30%,栽植准确度提高了20%。
蔬菜自动移栽机及其关键部件设计与研究
农业装备农业开发与装备 2023年第6期蔬菜自动移栽机及其关键部件设计与研究宋元萍(山西省农业机械发展中心,山西太原 030031)摘要:我国人口众多,对新鲜蔬菜有巨大需求,有必要对蔬菜种植做系统性研究。
以蔬菜移栽环节作为研究对象,简单分析蔬菜自动移栽机的工作原理,从送苗机构、苗盘推送机构、液压缸选型等方面,详细分析关键部件的功能,并研究曲柄摇杆的参数、取苗机构工作原理与运动轨迹,完善蔬菜自动移栽机的设计。
旨在为更多农业机械生产企业提供技术帮助,推动我国农业的可持续发展。
关键词:自动移栽机;机械原理;关键部件0 引言当前,主要依靠人工移栽或半自动机械设备移栽,不仅移栽效率偏低,也难以有效保证蔬菜移栽质量。
为此,有必要对自动移栽机进行设计,实现高质量、高效率的蔬菜移栽作业。
笔者在查阅大量相关资料后,设计一款结构简单、性能良好的牵引式自动移栽机。
1 自动移栽机工作原理本文设计的蔬菜自动移栽机将采用牵引式设计模式,其结构紧凑设计,可以细分为以下几个部分:承载各个机构的机架、取苗机构、放苗机构、移动地轮装置等。
苗盘横向有6个蔬菜秧苗移栽穴,纵向有12个蔬菜秧苗移栽穴。
自动移栽机的尾部设置两条输送带,运行期间,需要将苗盘放在输送带上,启动PLC(Programmable Logic Controller,可编程逻辑控制器)控制系统,输苗机构将会从等待状态进入工作状态[1]。
此时,两条输送带在预热后,以循环往复的交替方式,将苗盘运送到中间位置的推盘上。
在确认苗盘已经抵达推盘后,液压缸会通过移动推盘,将苗盘运送到步进移位输送带的预设位置。
取苗机构设计平行4连杆,通过电机驱动,采用2次的往复运动,完成蔬菜秧苗的取苗与放苗动作,并进入下一个蔬菜秧苗的取、放动作循环。
取苗机构分左、右两侧,共2组,1组拥有6个负责夹取蔬菜秧苗的苗夹,即取苗机构共设置12个苗夹,可以实现一次性进行12个蔬菜秧苗的取苗、放苗动作,极大提升蔬菜移栽效率。
移栽机整排取苗装置设计及仿真

移栽机整排取苗装置设计及仿真移栽机整排取苗装置设计及仿真摘要:移栽机整排取苗装置是农业机械中一个重要的部分,它的设计和改进对提高农田的生产效率和减轻农民劳动强度具有重要意义。
本文针对目前移栽机整排取苗装置的设计存在的问题和不足,结合仿真技术,提出了一种新的设计方案,并进行了仿真验证。
仿真结果表明,该设计方案能够更加高效地实现整排取苗,具有较好的稳定性和可行性。
文章还提出了进一步改进和优化的方向,为移栽机整排取苗装置的研发提供了参考和借鉴。
关键词:移栽机;整排取苗装置;设计;仿真一、引言移栽机是农业生产过程中不可或缺的重要机械设备之一,它通过将苗盘中的幼苗整齐地移植到农田中,实现了苗期管理的自动化和机械化,极大提高了农田的生产效率。
移栽机整排取苗装置作为移栽机的关键部件,直接影响着移栽机的工作效率和稳定性。
目前,市场上存在的移栽机整排取苗装置的设计还存在一些问题和不足:1)抓取力度不够稳定,导致苗盘中的幼苗易受损;2)整排取苗时容易发生偏移,导致移栽不准确;3)装置的尺寸和重量过大,影响移栽机的操控性和灵活性。
本文采用了仿真技术,对移栽机整排取苗装置进行了设计和改进,旨在解决上述问题和不足,提高移栽机的工作效率和稳定性。
二、设计方案1. 整排取苗机构设计对于移栽机整排取苗装置的抓取力度不够稳定的问题,我们设计了一种新型机构。
该机构由气动缸、机械手爪和力控装置组成。
利用气动缸控制机械手爪的开合,力控装置实时感知机械手爪的抓取力度,根据设定的力度范围对气动缸施加调节力,保证机械手爪的抓取力度稳定。
2. 整排取苗控制系统设计为了解决整排取苗时的偏移问题,我们设计了一种新的整排取苗控制系统。
该系统由摄像头、图像处理器和运动控制器组成。
摄像头实时拍摄移栽机行走时的苗盘图像,图像处理器对图像进行处理,提取苗盘中的苗和背景信息,通过运动控制器对移栽机的行走路径进行调整,实现整排取苗的准确性和稳定性。
三、仿真验证为了验证设计方案的可行性和效果,我们采用了SolidWorks仿真软件进行仿真模拟。
单行蔬菜钵体苗自动移栽机的设计—取苗装置设计
任务书课题名称单行蔬菜钵体苗自动移栽机的设计—取苗装置设计主要任务与目标现代的中国是一个经济飞速发展的中国,是一个农业大国,更是一个工业大国,我国也有越来越多的重视农业与工业的结合,将工业机械用于农业,以减轻人力操作,增加作业效率,蔬菜移栽机也更多的在进行开发并投入使用价值,对于这方面的研究也更加有意义。
所以,我们结合所学,应用三维仿真软件,初步设计出移栽机的取苗机构,为以后的进一步研究做基础。
主要内容与基本要求1、查找国内外相关文献资料,了解西方发达国家和我国蔬菜移栽机方面的区别、合理之处机器弊端2、收集整理其他国家对于移栽机的分类及其成果3、整理数据资料落实写作。
4、通过对文献的研究和分析,具体描述我国农业机械尤其是自动移栽机的发展和展望。
5、通过上述分析,设计蔬菜自动移栽机。
要求:1.文献综述报告(不少于3000字)一篇2.开题报告一篇3.毕业论文一篇(不少于10000字)4.实习日记、实习报告3000字以上主要参考资料及文献阅读任务[1]我国蔬菜育苗移栽机械化的现状与发展方向,/2007/3-5/94922.htm[2]陈殿奎.蔬菜机械化育苗的现状与展望[J].农业工程学报,1990,(12):20~25.[3]G. V. Prasanna Kumar ;H. RahemanInternational Journal of VegetableScience,V ol.14,No.3,232-255[4]Konosuke TSUGA. Development of fully automatic vegetable transplanter.JARQ 34, 21~28 (2000)[5]王君玲,高玉芝,李成华.蔬菜移栽生产机械化现状与发展方向.农机化研究,2004(02):22~28[6]张波屏.现代种植机械工程[M].北京:机械工业出版社,1997.[7]封俊.论我国早地栽植机械的开发前景与方向[J].中国农机化,2000,(4):12~13.[8]俞高红,陈志威,赵匀,孙良,叶秉良椭圆一不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究DoI:10.390l,JME.2012.13.032[9]毛君, 毕长飞.基于Pro/Engineer 采煤机的三维动态仿真与优化设计[J].煤矿机械,2006,27(6) : 990-994.外文翻译任务(见外文翻译)计划进度:起止时间内容2013.01.07~2013.01.12 调研、信息汇总,文献查阅分析2013.01.13~2013.01.30 外文翻译、文献综述、开题报告,并熟悉理论力学、机械原理等相关知识2013.01.31 ~2013.03.01 提交开题报告、文献综述及外文翻译2013.03.02~2013.03.08 开题答辩2013.03.09~2013.03.16 蔬菜移栽机整体方案设计2013.03.17~2013.03.30 取苗机构设计及零部件设计2013.03.31~2013.04.11 三维CAD建模、装配2013.04.12~2013.04.24 三维运动学分析仿真2013.04.25~2013.05.02 结构改进设计及毕业论文撰写2013.05.03~2013.05.10 完成并提交毕业论文2013.05.11~2013.05.24 整理材料准备答辩2013.05.25~2013.05.29 论文答辩实习地点指导教师签名年月日系意见系主任签名:年月日学院盖章主管院长签名:年月日文献综述报告班级姓名课题名称单行蔬菜钵苗自动移栽机的设计—取苗装置设计文献综述目录1前言2国外蔬菜自动移栽机的发展和研究成果3国内蔬菜自动移栽机发展和研究成果4国内外蔬菜自动移栽机动态与趋势5总结参考文献(报告全文附后)指导教师审批意见签名:年月日单行蔬菜钵苗自动移栽机的设计—取苗装置设计1前言据FAO统计,2006年中国已成为世界上最大的蔬菜生产国,蔬菜产量约占世界总产量的49.6%[1]。
蔬菜穴盘钵苗取苗机构设计——基于PLC控制和虚拟样机技术

蔬菜穴盘钵苗取苗机构设计——基于PLC控制和虚拟样机技术姜岩蕾;韩艳赞【摘要】蔬菜穴盘钵苗是目前最常用的育苗方式之一,其工作方式为人工取苗后,再由机械进行栽苗操作的半自动化移栽,但这种方式的种植效率受到人工取苗效率的限制,达不到高效移栽的目的.为此,设计了一种新的自动取苗装置,并提出了5个椭圆齿轮组成行星取苗机构,利用PLC控制系统,可以实现取苗的连续自动化操作,并配备了远程控制和闭环调节环节,大大提高了穴盘育苗的机械效率和作业精度.利用虚拟样机仿真测试的方法对取苗机构进行了优化设计,使用UG软件建立了取苗机构的模型,将模型导入到ADMAS软件中进行了动力学仿真,将虚拟仿真得到的取苗片尖点运动轨迹结果和实验测试结果进行了对比,验证了其一致性.【期刊名称】《农机化研究》【年(卷),期】2017(039)001【总页数】5页(P222-226)【关键词】穴盘育苗;虚拟样机;PLC控制;闭环调节;ADMAS仿真【作者】姜岩蕾;韩艳赞【作者单位】河南工业职业技术学院,河南南阳473000;河南工业职业技术学院,河南南阳473000【正文语种】中文【中图分类】S223.94目前,半自动蔬菜钵苗移栽机是穴盘育苗移栽过程中使用的主要机械,该机械利用人工取苗和放苗,降低了工作效率。
随着移栽机构转速的增加,露苗速度也会加快,因此需要研究一种集自动送苗、取苗、植苗等多种功能于一体的全自动蔬菜钵苗移栽机,以提高穴盘育苗提高工作效率。
取苗机主要结构为自动化取苗机构,但目前国内外研究的自动取苗装置结构复杂,不易大规模生产和制造,只有设计出合理简单的取苗结构,才能降低设计和制造成本,加快全自动移栽机械的发展速度。
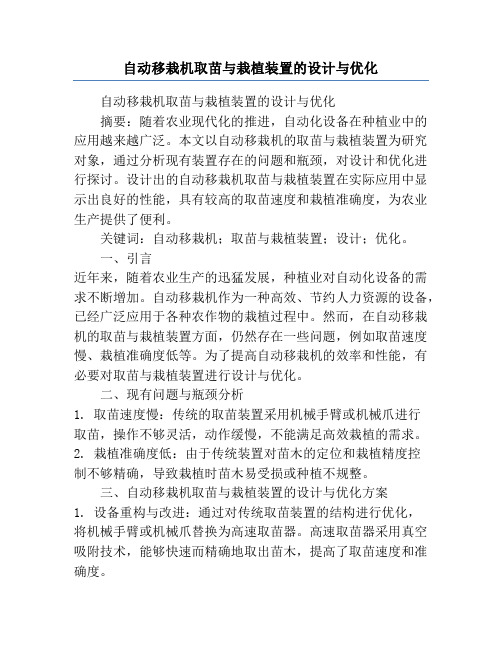
目前,育苗最广泛使用的3种方式为穴盘育苗、苗床育苗及营养育苗,穴盘育苗是将营养土壤放置于穴孔中,将种子种在穴盘中,待秧苗长成后将秧苗取出,进行种植,这种育苗方式利于机械移栽。
钵苗盘的结构如图1所示。
当秧苗长成之后,实现秧苗的顺利移栽是实现穴盘育苗种植的关键。
蔬菜钵苗自动移栽机送苗装置的设计与分析
蔬菜钵苗自动移栽机在农业机械领 域得到了一定程度的应用,其应用主要 形式包括钳夹式、链夹式、导苗管式、 挠性圆盘式和吊杯式 5 种,在具体送苗 过程中,半自动的移栽机需要人工取苗 和喂苗,这对于移栽机应用效率产生了 较大的影响。传统的移栽机受到人工喂 苗 速 度 影 响, 移 栽 效 率 在 30 ~ 40 株 / min。 随着我国蔬菜移栽技术的快速发展, 对半自动移栽机进行改进,提升移栽机 送苗效率,成为近年来农业机械发展关 注的一个热门话题。现就这一问题从蔬 菜钵苗自动移栽机的特征入手,分析其 送苗、取苗的实际情况,有针对性地进 行设备改进,提升送苗速度。 一、蔬菜钵苗自动移栽机装置结构 与工作原理 (一)蔬菜钵苗自动移栽机装置结构 蔬菜钵苗自动移栽机装置结构主要 涉及机械、取苗机构的连接轴、滑轨、 秧板、支架、方向轮、双螺旋轴机构和 取苗爪支座等装置。通过各个装置之间 的协调合作,实现蔬菜钵苗自动移栽机 的工作目标。 (二)工作原理 蔬菜钵苗自动移栽机工作过程中, 秧板、 秧箱支架、 连接轴实现装置的工作。 移栽机的电机为其工作提供动力,并且 由链轮带动连接轴,实现秧板、滑轨等 机械设备的工作。穴盘位于秧板上面, 链条向前移动时,链轮与棘轮的联动, 实现纵向简洁送苗的目标。横向结构方 面,分割器和双螺旋轴机构是实现蔬菜 钵苗自动移栽机工作的主要部分。在这 一过程中, 电机为分割器提供动力支撑, 双螺旋轴是主要输出部分,双螺旋轴的
滑块部分会控制双螺旋轴上的秧箱进行 移动从而实现送苗功能。同时,在取苗 设计过程中,通过利用取苗机构,可以 实现送苗工作和取苗工作的自动化发展。 二、蔬菜钵苗自动移栽机送苗装置 的设计 在进行蔬菜钵苗自动移栽机送苗装 置设计过程中,考虑其自动化水平,需要 保证送苗装置具有横向送苗和纵向送苗 能力,并对取苗机构和壮苗位置进行有 效设计。具体设计情况如下:钵苗盘规 格选择上,纵向 16 穴,横向 8 穴,穴口 大小为 32 mm×32 mm,深度为 42 mm, 中心间距为 35 mm, 中心孔距离为 36 mm。 蔬菜取苗机构设计过程中,采取旋转式设 计方法,保证送苗装置工作具有较高的自 动化水平。送苗装置设计过程中,配备 2 个取苗爪,能够保证移栽机进行较好的协 调作业,提升工作效率。 蔬菜钵苗自动移栽机整体方案设计 过程中,要注重对取苗机构进行固定, 并且横向取苗装置设计时,应采取往复 间歇式的送苗作业方式。纵向取苗装置 设计时,采取纵向间歇式的设计方式, 实现纵向送苗作业。这一过程中,钵苗 盘位置选择时,根据钵苗盘的选型,8 穴为横向,16 穴为纵向。结合设计方案 来看,送苗装置的设计要求需要对以下 内容予以考虑。第一,秧箱以横向进行 往复运动,间隔距离为 36 mm,秧箱完 成 2 次移动后,取苗爪旋转一周。秧箱 运动到取苗位置后停止,保证取苗爪能 够抓取秧苗,并且保证取苗爪和秧箱的 运动是相互独立的,避免二者之间出现 干扰, 影响到工作质量和工作效率。 第二, 钵苗盘运动过程中,采取了纵向间歇作
自动移栽机械取苗机构及植苗机构研究

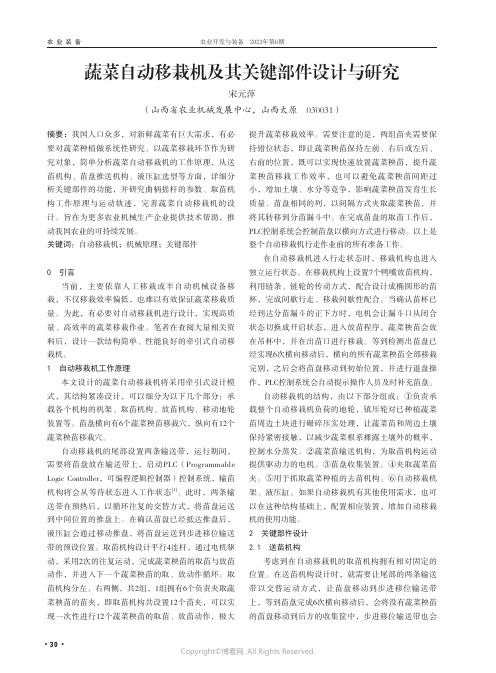
通过动力盘(槽形凸轮)的旋转,实现夹指的张开和闭合
浙江大学设计的取苗机构
采用两个成一定倾斜角的气缸实现夹持。针式手指取苗成 功率较低,经过改进,采用铲式手指,成功率可达到82.5%。
美国Williames等提出的取苗方式
输送器伸入到苗内,通过一顶杆把钵苗顶到输送器内,当输 送器内装好钵苗后,旋转90°,然后把苗落入到导苗管内,进行 移栽。
• 原理与四杆机构相 似,优点是栽植时 相比四杆机构更稳 定,适合于高速栽 植,但是缺少与之 对应的高速自动喂 苗装置。 • 缺点是单栽植臂栽 植株距比较大,需 要通过调节栽植臂 的数量或者机构杆 长来调节株距。
六杆机构
4 3 5 6 2 1
由斯蒂芬斯六杆机构变换得到。选取杆件4作为机架,6为
国内
分类 发明单位或个人 机型 优点 缺点
钳夹式移栽 1979年山西省运城 2zMB一2型钵苗 栽植机械结构简 作业速度低 机 地区农机所 移栽机 单,株距和栽植 深度稳定
吊篮式移栽 1997年黑龙江省八 2ZB-6型钵苗栽 可栽植多种蔬菜, 机 五零农场 植机 钵苗直立率达96%
导苗管式移 1995年北京农业大 2Z-4型栽植样机 对秧苗没有特殊 直立度不高 栽机 学 的要求 ,适应性 强 圆盘式栽植 1999年吉林工业大 2ZT型栽植机 机 学 单独秧夹 伤苗率小于5%
关键机构
移-取苗机构 取苗机构是将穴盘 苗夹取并最终释放 至植苗机构的工作 部件
栽-植苗机构 植苗机构是将取苗机 构释放的穴盘苗进行 接取并移栽至大田的 工作部件
2
取苗机构研究
研究现状
取苗机构用于夹取幼苗,并投放到植苗器中。
目前国内移栽机仍普遍采用人工投苗方式,自动 取苗机构仍处于探索阶段。
钵苗移栽机取苗装置的设计与试验
钵苗移栽机取苗装置的设计与试验
刘存祥;刘恩光;赵戬;金聪;李慧琴
【期刊名称】《农机化研究》
【年(卷),期】2024(46)10
【摘要】设计了一种钵苗移栽机取苗装置,并对夹苗和松苗两种状态下的末端执行器进行运动仿真,从而选择合适行程的气缸或推杆作为原动件。
选用凸轮机构用于
顶苗,根据凸轮各阶段工作规律设计出合理的轮廓线,利用仿真验证出满足设计要求。
试验结果表明:设计的取苗装置未取出率平均值为8.22%,取苗成功率平均值为
91.78%,达到了设计目标。
【总页数】8页(P66-72)
【作者】刘存祥;刘恩光;赵戬;金聪;李慧琴
【作者单位】河南农业大学机电工程学院
【正文语种】中文
【中图分类】S223.92;S220.3
【相关文献】
1.蔬菜钵苗自动移栽机送苗装置的设计与试验
2.蔬菜钵苗移栽机取苗臂凸轮机构的设计与试验
3.水稻钵苗移栽机整排多株夹取式取苗机构的研究与设计
4.番茄钵苗
移栽机自动取苗装置作业参数优化与试验5.蔬菜钵苗密植移栽机多行取苗机构设
计与试验
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计(论文)通过答辩目录Abstract (3)第1章绪论 (6)1.1前言 (6)1.2国内外蔬菜钵苗取苗机构的发展概述 (8)1.2.1我国蔬菜钵苗移栽机械化发展概况 (8)1.2.2我国蔬菜钵苗移栽机存在的问题 (9)1.2.3我国蔬菜钵苗移栽机存在问题解决途径分析 (9)1.2.4国外蔬菜钵苗自动移栽机的发展和研究成果 (10)1.2.5蔬菜钵苗移栽机发展方向 (11)1.3国内取苗机构存在的主要问题和发展方向 (12)1.3.1国内取苗机构发展存在的主要问题 (12)1.3.2国内蔬菜取苗机构的发展方向 (12)1.4本文的研究目标 (13)1.5本文的主要工作及内容安排 (14)1.6本章小结 (14)第2章蔬菜钵苗取苗机构的运动学分析 (15)2.1取苗爪工作要求的实现 (15)2.2蔬菜钵苗取苗机械手的机构组成与工作原理 (16)2.3 椭圆齿轮传动的运动分析 (18)2.3.1 椭圆齿轮的啮合特性及优点 (18)2.3.2 椭圆齿轮的角位移、角速度和传动比分析 (19)2.4蔬菜钵苗取苗机械手运动学模型的建立 (21)2.4.1运动学分析符合的说明 (21)2.4.2蔬菜钵苗取苗机械手位移分析 (22)2.4.3机械手上各点位移方程和各构件角位移方程 (23)2.4.4 机构上各点的速度方程和各构件角速度方程 (25)2.4.5 机械手上各点的加度方程和各构件角加速度方程 (26)2.5本章小结 (28)第3章蔬菜钵体苗自动移栽机取苗机构的参数优化 (29)3.1优化目标与变量 (29)3.2辅助分析优化软件 (29)3.2.1人机交互简介 (30)3.2.2本课题人机交互软件介绍 (31)3.2.3椭圆齿轮参数计算 (31)3.2.4取苗机构参数优化步骤 (32)3.2.5取苗爪尖点的速度分析 (33)3.3本章小结 (35)第4章蔬菜钵苗自动移栽机取苗机构的结构设计 (36)4.1蔬菜钵体自动移栽机取苗机构的整体结构设计 (36)4.2取苗臂机构设计 (37)4.3 CAD软件介绍 (38)4.3.1 CAD二维取苗机构零件图 (39)浙江理工大学本科毕业设计4.4 Proe软件介绍 (40)4.4.1 三维Proe取苗机构零件图 (41)4.5总装配图 (42)4.6 本章小结 (43)第5章总结与展望 (44)5.1 总结 (44)5.2 进一步的展望 (45)致谢 (46)参考文献 (47)附录 (49)蔬菜钵体苗自动移栽机——取苗装置设计摘要移栽是蔬菜生产过程中的重要环节之一,移栽具有对气候的补偿作用和使作物生育提早的综合效益,可以充分利用光热资源,其经济效益和社会效益均非常可观。
目前,国内正在应用的移栽机械多为半自动移植机,半自动移栽机靠手工送苗,效率低,劳动强度大,而国内自动移栽机的研究刚刚起步,自动移栽机从取苗到植苗都由机械自动完成,效率高。
国外虽有一些自动移栽机应用于生产,但还处于不断研究与推广阶段。
而取苗机构是制约自动移栽机发展的“瓶颈”,也是制约蔬菜大规模种植的关键问题之一。
因此设计一种新型的取苗机构替代手工取苗,已成为我国蔬菜种植业发展的迫切需要。
本文总结吸收了国内外各种取苗机构的优缺点,在实验室已有研究成果的基础上,设计了一种新型蔬菜钵苗取苗机构,该机构可以单独作为取苗机构,实现自动取苗;或通过改进部分结构参数,可以集栽取功能于一体,即取苗和栽植苗动作都由该套机构完成。
该蔬菜钵苗取苗机构结构简单,工作可靠,取苗效率高。
本文主要的研究内容如下:1.根据蔬菜钵苗取苗的技术特点和农艺要求,模拟人工取苗的轨迹、动作和姿态要求,发明蔬菜钵苗取苗机构,满足机械取苗特殊的工作轨迹要求,比现有的蔬菜取苗机构工作效率高,并且工作平稳。
2.论述了该取苗机构的工作原理和结构特点,建立取苗机构的运动学模型。
3.以建立的运动学模型为基础,基于可视化开发平台VB6.0,通过其软件分析蔬菜钵苗取苗机构辅助分析与优化软件(软件登记号:2011SR030044),介绍了该软件的人机交互界面及功能,基于该软件,解决了该机构运动学多目标优化的难点。
4.根据蔬菜取苗农艺要求,提出蔬菜钵苗取苗机构参数优化的目标和优化方法,分析各参数变化对取苗机构运动特性的影响,利用自主开发软件,采用人机交互的优化方法,优化出取苗机构的结构参数,满足蔬菜钵苗取苗的工作要求。
5.按照优化得到的结构参数,进行蔬菜钵苗取苗机构的总体设计,讨论了设计中应该注意的问题,最后在ProE、CAD下完成装配图和各零件的设计。
6.建立取苗机构的三维实体模型,对其进行虚拟装配。
关键词:蔬菜钵苗;取苗机构;工作机理;参数优化;试验研究浙江理工大学本科毕业设计Optimal and Design of Vegetable Plug Seedling Pick-upMechanism of Planetary Gear Train with Ellipse Gears andIncomplete Non-circular GearAbstractTransplanting is an important process of vegetable procreating, which has the function of compensating varying climate and shifting the procreating of plants to an earlier time. It helps the plants to use the source of light and temperature sufficiently, which will make considerable economical and social benefits. At present, most transplanting machines are semi-automatic transplanting machines ,they need pick up plug seedling by man ,which have high work intensity and low work efficiency ,and domestic research on automatic transplanting machine is just beginning . Automatic transplanting machine can pick up plug seedling and transplanting plug seedling by themselves ,which have low work intensity and high work efficiency. The overseas have automatic transplanting machine be applied in production,but the application and research on automatic transplanting machine is developing.Thus the pick up plug seedling machine is the key issues,which restricted the development of automatic transplanting machine and at same time ,which is also restricted the development of the plants of vegetable . So it's a pressing requirement to design a new kind of pick up plug seedling machine.This paper concludes the merits and demerits of several kinds of transplanting machines from both domestic and abroad. Based on the achieved research result, a new vegetable plug seedling pick-up mechanism of planetary gear train with ellipse gears and incomplete non-circular gear has been designed. This vegetable plug seedling pick-up can be used as seedling fetching mechanism lonely to realize fetching seedlings automatically. Besides, if the mechanism parameters of this mechanism have been optimized properly, the motion of fetching seedlings and transplanting seedlings can both be realized by this mechanism. This vegetable plug蔬菜钵体苗自动移栽机——取苗装置设计seedling pick-up mechanism has simple structure and reliable performance. The main content of this paper is listed as bellow:1. According to the technological characteristics and agricultural requirements, imitate the requirements of trajectory, motion and attitude of manual pick up plug seedling, invent the vegetable plug seedling pick-up mechanism, which can satisfy the special working trajectory requirements of fetching and pick up plug seedlings automatically. This new vegetable plug seedling pick-up mechanism has higher working efficiency, steadier transmission and less vibration than existing mechanism.2. The working principle and structural features of this automatic vegetable plug seedling pick-up mechanism has been discussed and the kinematic mathematical model of this mechanism has been established.3.Based on the established kinematic mathematical model and Visual Basic 6.0, develop the kinematic aided analytical and optimal software of this vegetable plug seedling pick-up mechanism (Register Number: 2011SR030044). Introduce the human-computer interactive interface and functions of this software. By this software, the difficulty of optimization with multiple kinematic objects of this mechanism can be solved.4. According to the agricultural requirements in our country, put forward the parametric optimal objects and methods of the vegetable plug seedling pick-up mechanism. Analyze the influence of parameter vitiation on kinematic characteristics of this vegetable plug seedling pick-up mechanism. Take advantage of the developed software, use the optimization method of human-computer interactive, and obtain the structural parameters which can satisfy the working requirements of automatic vegetable pot seedling transplanting.5. In accordance with the obtained structural parameters, design the ensemble of the vegetable plug seedling pick-up mechanism; discuss the problems which should be noticed in the process of designing. Finally finish the design of parts and the assembly drawing basing on ProE and CAD.6. Establish the solid model of all parts of this vegetable plug seedling pick-up mechanism in UG6.0 and then carry out the virtual assemble.浙江理工大学本科毕业设计Keywords:Vegetable plug seedling; Pick-up mechanism; Work principle; Parameters optimization; Test study蔬菜钵体苗自动移栽机——取苗装置设计第1章绪论1.1前言据FAO统计,2006年中国已成为世界上最大的蔬菜生产国,蔬菜产量约占世界总产量的49.6%[1]。