超声波功率驱动与测量装置设计
超声波电源驱动电路的设计
超声波换能器驱动电路的设计
EXB841芯片简介
Uce由二极管V7检测.当IGBT开通时,若发生负载短路等产生大电流的故障,Uce值大幅 上升,使二极管V7截止,EXB841的6脚“悬空”,B点和C点电位开始由约8 V 上升,当 上升至13 V 时,Vs1被击穿,V3导通,C4通过R7和V3放电,E点的电压逐渐下降,V6导 通,从而使IGBT的GE间电压Uge下降,实现缓关断,完成EXB841对IGBT的保护.
va9为8v稳压管超声波换能器驱动电路的设计在做这个项目的设计过程中我们遇到了很多问题和困难但在xxxxxx教授的指导和电信学院xxxxxx实验室同窗好友们的帮助下最终完成了本项目的设计工作并且已经在一家相关的企业中做最后的测试工作
超声波电源驱动电路的设计
演讲目录
目 录
超声波换能器驱动电路的设计
引言
超声波换能器驱动电路的设计
壹
针对过流产生时,设计的软件和硬件电路双重封锁PWM信号。
创新点:
解释:
12 3
硬件电路上双重控制PWM 信号。当没有过流发生时, EXB841的5引脚不输出故 障信号,此时5引脚输出 的是高电平,三极管VA0 不导通,此时,与门1引 脚为高电平,由单片机产 生的PWM使三极管VA1导 通,此时,与门2引脚为 高电平,与门输出高
超声波换能器驱动电路的设计
项目创新亮点简介
壹
针对过流现象产生时,设计的软件和硬件电路双重控制PWM信号。
贰
针对EXB841芯片内部提供的-5V负偏压不足重新设计的电路。
超声波换能器驱动电路的设计壹 Nhomakorabea针对过流产生时,设计的软件和硬件电路双重封锁PWM信号。
创新点:
解释:
基于单片机控制的超声波测距系统的设计

基于单片机控制的超声波测距系统的设计一、概述。
超声波测距技术是一种广泛应用的测距技术,它能够非常精确地测量物体到传感器的距离。
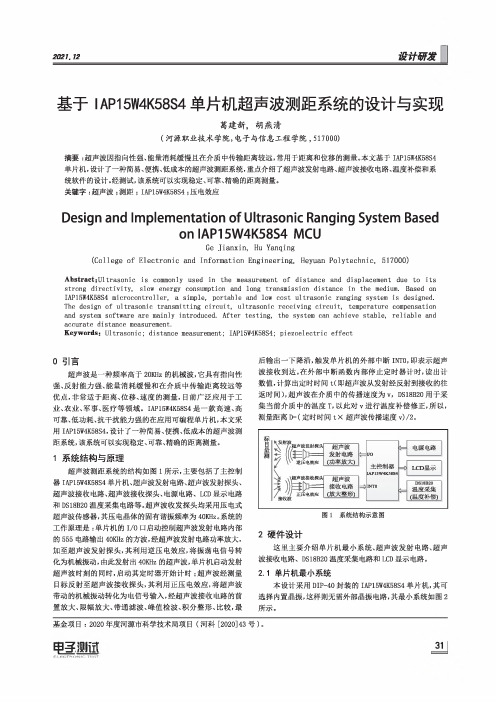
本文介绍的基于单片机控制的超声波测距系统主要由控制模块、信号处理模块和驱动模块三部分组成。
其中,控制模块主要实现超声波信号的发射与接收,信号处理模块主要实现对测量结果的处理和计算,驱动模块主要实现对LED灯的控制。
二、硬件设计。
1.超声波发射模块:采用 SR04 超声波发射传感器,并通过单片机的PWM 输出控制 SR04 的 trig 引脚实现超声波信号的发射。
2.超声波接收模块:采用SR04超声波接收传感器,通过单片机的外部中断实现对超声波信号的接收。
3.控制模块:采用STM32F103单片机,通过PWM输出控制超声波发射信号,并通过外部中断接收超声波接收信号。
4.信号处理模块:采用MAX232接口芯片,将单片机的串口输出转换成RS232信号,通过串口与上位机进行通信实现测量结果的处理和计算。
5.驱动模块:采用LED灯,通过单片机的GPIO输出控制LED灯的亮灭。
三、软件设计。
1.控制模块:编写程序实现超声波信号的发射与接收。
其中,超声波发射信号的周期为 10us,超声波接收信号的周期为 25ms。
超声波接收信号的处理过程如下:(1)当 trig 引脚置高时,等待 10us。
(2)当 trig 引脚置低时,等待 echo 引脚为高电平,即等待超声波信号的回波。
(3)当 echo 引脚为高电平时,开始计时,直到 echo 引脚为低电平时,停止计时。
(4)根据计时结果计算物体到传感器的距离,将结果通过串口输出。
2.信号处理模块:编写程序实现接收计算结果,并将结果通过串口与上位机进行通信。
具体步骤如下:(1)等待串口接收数据。
(2)当接收到数据时,将数据转换成浮点数格式。
(3)根据测量结果控制LED灯的亮灭。
以上就是基于单片机控制的超声波测距系统的设计。
该系统能够通过精确测量物体到传感器的距离并对测量结果进行处理和计算,能够广泛应用于各种实际场合。
超声波电源的设计
超声波电源的设计超声波设备通常需要稳定的直流电源来驱动超声波发生器和传感器。
因此,超声波电源的设计需要满足以下要求:1.工作电压和电流:根据超声波设备的工作需求,确定适当的工作电压和电流。
一般来说,超声波设备的工作电压在10V到100V之间,电流在0.1A到1A之间。
2.稳定性:超声波电源需要提供稳定的电压和电流输出,以确保超声波设备的正常工作。
为了实现稳定性,可以采用电压稳压器、电流稳流器等电路设计。
3.过载和短路保护:超声波设备可能会遇到过载和短路情况,因此超声波电源需要具备过载和短路保护功能。
这通常可以通过采用过载保护电路和短路保护电路来实现。
4.效率:为了提高超声波电源的效率,可以采用高效率的功率变换器来降低能耗。
常用的功率变换器包括开关电源和开关模式电源等。
5.纹波和噪声:超声波电源需要降低输出电压和电流的纹波和噪声水平,以确保超声波设备的正常工作。
可以采用滤波器等电路设计来降低纹波和噪声。
6.温度保护:超声波电源需要具备温度保护功能,以防止过热损坏。
可以采取过温保护电路设计来实现温度保护。
1.分析超声波设备的工作需求,确定电源的工作电压、电流和其他特性。
2.设计电源的基本电路,包括整流电路、滤波电路、稳压电路和保护电路等。
3.选择适当的元器件,包括整流器、滤波电容、稳压器、保护元件等。
在选择元器件时,需要考虑其工作电压、电流以及供应商的信誉度。
4.进行电路仿真和优化,以确保电源设计的稳定性、效率和可靠性。
5.进行实验验证,测试电源的性能和可靠性。
6.优化设计并进行样机制作,最终完成超声波电源的设计。
总之,超声波电源的设计需要综合考虑超声波设备的工作需求,通过合理的电路设计和元器件选择,以实现稳定、高效、可靠的电源供应。
超声波测距系统的设计

超声波测距系统的设计引言:一、硬件设计:1.选择传感器:超声波传感器是测距系统的核心部件,通常采用脉冲法进行测量。
在选择传感器时,应考虑工作频率、测量范围、精度和稳定性等参数,并根据实际需求进行选择。
2.驱动电路设计:超声波传感器需要高频信号进行激励,设计驱动电路时需要根据传感器的工作要求来设计合适的电路,保证信号稳定且能够满足传感器的工作需求。
3.接收电路设计:超声波传感器产生的脉冲回波需要经过接收电路进行信号放大和滤波处理,设计接收电路时需要考虑信号放大的增益、滤波器的截止频率以及抗干扰能力等因素。
4.控制板设计:控制板是超声波测距系统中的核心控制器,负责控制测距过程、数据处理以及通信等功能。
在设计控制板时,应根据系统的要求选择合适的微控制器或单片机,并设计合理的电路布局和电源电路。
二、软件编程:1.驱动程序开发:根据传感器的规格书和数据手册,编写相应的驱动程序,实现对超声波传感器的激励和接收。
2.距离计算算法开发:通过测量超声波的往返时间来计算距离,根据声速和时间的关系进行距离计算,并根据实际情况对计算结果进行修正。
3.数据处理和显示:根据实际需求,对测量得到的距离进行处理,并将结果显示在合适的显示设备上,如LCD屏幕或计算机等。
4.数据通信:如果需要将测量结果传输至其他设备或系统,则需要编写相应的数据通信程序,实现数据的传输和接收。
三、系统测试与优化:1.测试传感器性能:测试测距系统的稳定性、精度和灵敏度等性能指标,根据测试结果对系统参数进行优化和调整。
2.系统校准:超声波测距系统可能受到环境温度、湿度和声速等因素的影响,需要进行校准以提高测量精度。
3.系统集成与实际应用:将超声波测距系统与实际应用场景进行集成,进行实际测试和验证。
总结:超声波测距系统的设计包括硬件设计和软件编程两个方面,其中硬件设计主要包括传感器选择、驱动电路设计和接收电路设计等;软件编程主要包括驱动程序开发、距离计算算法开发、数据处理和显示以及数据通信等。
课程设计实验报告-超声波测距仪的设计

超声波测距仪的设计一、设计目的本设计利用超声波传输中距离与时间的关系,采用STC51单片机进行控制和数据处理,设计出能够精确测量两点间距离的超声波测距仪。
同时了解单片机各脚的功能,工作方式,计数/定时,I/O口的相关原理,并稳固学习单片机的相关内容知识。
二、设计要求1.设计一个超声波测距仪,能够用四段数码管准确显示所测距离2.精度小于1CM,测量距离大于200CM三、设计器材元器件数量STC51单片机 1个超声波测距模块URF-04 1个电阻〔1K 200 4.7K〕 3 个晶振〔12MHz〕 1 个共阳极四位数码管 1 个极性电容〔33pF〕 2 个非极性电容〔22uF〕 1 个四、超声波测距系统原理331.45米/秒,由单片机负责计时,单片机使用12.0M晶振,所以此系统的测量精度理论上可以到达毫米级。
超声波测距的算法设计: 超声波在空气中传播速度为每秒钟340米〔15℃时〕。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2-X1=0.03S,那么有340m×0.03S=10.2m。
由于在这10.2m 的时间里,超声波发出到遇到返射物返回的距离如下:图1 测距原理超声波测距器的系统框图如下列图所示:图2 系统框图五、设计方案及分析〔包含设计电路图〕4.1硬件电路设计4.1.1 单片机最小系统控制模块设计与比拟方案二:采用STC51单片机控制。
STC51单片机是一种低功耗、高性能CMOS8位微控制器,具有 8KB的系统可编程Flash 存储器。
AT89S52具有以下标准功能: 8k字节Flash,256字节RAM, 32 位I/O 口线,看门狗定时器,2 个数据指针,三个16 位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振及时钟电路,能够满足题目设计的所有要求,而且我们对STC51单片机也比拟熟悉,因此我们选择方案二。
最小系统电路图如图3所示图3 单片机最小系统显示模块设计采用四位共阳极数码管显示,连接电路简单,显示电路连接图如图4所示图4 数码管显示电路超声波测距模块a.本系统采用超声波模块URF04进行测距,该模块使用直流5V供电,理想条件下测距可达500cm,广泛应用于超声波测距领域,模块性能稳定,测度距离精确,盲区〔2cm〕超近。
基于PLC和超声波传感器的工件高度检测装置设计

雷声 勇 莫振 栋 许 梅 艳 ( 柳州铁道职业技术学院电子工程 系, 广西 柳州 550 ) 4 07
摘 要
采 用 超 声 波传 感 器设 计 了一 种 非接 触 式 生 产 线 工件 高度 检 测 装 置 。 以 S — 0 L 为控 制 器 , 计 了超 声 波 传 感 器 720PC 设 与 控 制 器 的硬 件 电路 , 成 了 系统 的 软 件 设 计 和触 摸 屏 上 住 机 通信 。 完 实验 结 果 表 明 : 装 置 智 能化 与测 量 精 度 较 高 , 该 可靠 性
au o a i p o c i i e tm t c r du t on l . n
Ke wors:las nc wa e s s r ,ei deecin, —2 PL a t m a i o c i l e y d ut o i v en o sh ght r t t o S7 00 C,u o t pr du t c on i n
件 , 依靠 传 感 器 的位 移 量 转 换 为 电信 号 由控 制 器 进 行 处 理 , 它 这
种 检 测 方 法 属 于接 触 式 检 测 , 系统 控 制 要 求 相 对 复 杂 , 且 容 易 而 损 坏 工 件 。 因 此 以超 声 波 传 感 器 为 代 表 的 非 接 触 式 检 测 方 式 逐 渐 成 为 主 导 地 位 。在 控 制器 上 , 有相 关 的文 献 [— ] 绍 了以 单 2 5介 片 机 、 P等 为 控 制 核 心 的 系统 方 案 , 统 体 积 小 , 本 低 , DS 系 成 但
好 。 较好 地 应 用 于 自动 化 生产 线 中非 接 触 式 工件 高度 的检 测 。 可
关键词 : 声波传感器, 超 高度 检 测 ,7 20 P C, S — 0 L 自动 化 生n on— n a t - t c worpi e egh deec i de ie n n co k ec h i t t t on vc i idusr l odu t l e ti pr a ci on i usn ulas c n ig t oni wa e en or i de r v s s s s — sgn d. i s sem t es i e Ths y t ak S7-2 0PL 0 C a t e onr l ,esgn t h r s h c tol d i s he a dwar ci i f l a o c er e r t ut s ni wa e en or a c — cu o r v s s s nd on tol ,o pl e te r l c m ets h sot r de i a d t c s ee c er f wa e sgn n ou h cr n om munc t .h ia i T e e pe i ntl es l s o on x rme a r ut h w tat h devc h s s h te ie a
一种高频超声波换能器驱动电路的设计
一种高频超声波换能器驱动电路的设计
高频超声波换能器驱动电路的设计主要包括以下几个方面:
1. 选择合适的驱动器件:高频超声波换能器通常采用压电陶瓷材料制成,因此需要选择适合驱动压电陶瓷的驱动器件,常见的有MOSFET、IGBT等。
2. 驱动信号发生电路:设计一个能够产生高频驱动信号的电路,通常采用谐振电路或者多谐振电路来产生高频信号。
谐振电路可以根据超声波换能器的谐振频率进行设计,多谐振电路可以产生多个频率的信号,以适应不同的工作模式。
3. 驱动信号放大电路:由于超声波换能器的驱动信号幅度较小,需要通过放大电路将信号放大到足够的幅度。
放大电路可以采用功率放大器或者运放放大器等。
4. 驱动信号保护电路:由于高频超声波换能器在工作过程中会产生较高的功率,需要设计相应的保护电路来保护驱动器件和超声波换能器,如过电流保护、过温保护等。
5. 驱动电源设计:为了提供稳定的驱动电流和电压,需要设计一个合适的电源电路,可以采用直流电源或者交流电源,根据具体的需求选择。
6. 控制电路设计:为了实现对超声波换能器的控制,可以设计一个
控制电路,可以根据需要调节驱动信号的频率、幅度等参数。
高频超声波换能器驱动电路的设计需要考虑到驱动器件的选择、驱动信号的发生、放大和保护,以及电源和控制等方面,需要根据具体的需求进行设计。
用51单片机设计超声波测距系统的设计原理及电路(附源程序)
基于51单片机的超声波测距仪说明书引言超声波测距仪,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
利用超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制。
一、性能要求该超声波测距仪,要求测量范围在0.08-3.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
二、工作原理及方案论证超声波传感器及其测距原理超声波是指频率高于20KHz的机械波。
用超声波传感器产生超声波和接收超声波,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器.超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(timeofflight)。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离。
根据要求并综合各方面因素,采用AT89C52单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距仪的系统框图如下图所示:图1 超声波测距仪系统设计框图三、系统硬件部分硬件部分主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。
1.单片机系统及显示电路单片机采用AT89C52来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。
单片机通过P1.1引脚发射脉冲控制超声波的发送,然后单片机不停的检测外中断0口INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管驱动。
双模态超声波电机小波驱动的测量与控制
文章编号 : 2 58 9 (0 8 0 -190 0 5 -27 2 0 )20 9 -5
双 模 态 超 声 波 电 机 小 波 驱 动 的 测 量 与 控 制
徐从 余晓 裕, 芬
( 合肥工业大学 仪器科学 与光 电工程学 院 , 安徽 合肥 200 ) 309
摘
一
要: 针对 双模 态 U M在微纳米测控领域 中的应用特点 , S 设计单 一的小波驱 动模 式代替现 有的组合 驱动模式. 个小波驱动波 由 8个 3 . H 9 6k z的正弦 电压驱动 波组成 , 其最 高触发频 率为 5k z小 波驱 动模式 实现 了双模 态 H.
mo ea d t eDC a tain mo e hsp p rp o o e o e ige w v lta tain p t r fbmo a S , d h cu t d .T i a e rp ssa n v lsn l a ee cu t at n o i d U M n o o e l
Abta t tpee t i d l ao i m t U M)印pi olredsl e n cபைடு நூலகம்t na d n nme r src :A rsn,bmoa ut snc oo l r r( S l d t ag i a metata o n a o t e pc i e
sn o d lv la ewa e f3 6 k ius i a ot g v s o 9. Hz,wh s xmum rg e i r q n y i p t Hz n a p sto i g c n r l o e ma i tig rngfe ue c su o5 k .I o iin n o to
驱动分辨率和定位精度.
基于IAP15W4K58S4单片机超声波测距系统的设计与实现
[3] 赵小强,赵连玉.超声波测距系统中的温度补偿[J].组合 机床与自动化加工技术.2008(12):62-64.
(上接第30页)
[6] 王书洋,杨冠鲁.一种智能节能型多功能水龙头的设计[J], 科技创新导报,2017,14(25):102- 103.
収列起插2・20
峰值检波器,输出成近似平滑的水平信号,
3脚接检波器的检波电容,再经积分整形, 输出成倾斜信号,6脚接积分电容,最后经 比较器7脚输出一下降沿信号,触发单片机
的外部中断处理。
2.4 DS18B20温度采集电路和LCD显示
电路
以超声波在空气中传播为例,常温下超
声波速度v为340m/s,但其易受到空气中
与温度的拟合公式:v=331. 5+0. 607T,需按此式对波速进行
C1,具体表达式为 f=l/[ln2X (R1+2(R2+RW1)) XC1]O调节电
温度修正。
位器RW1,使输出方波的频率为40KHz,等于超声波发射探头
内压电晶片的固有谐振频率,以使压电晶片达到共振,产生
超声波。超声波发射控制端INC(接单片机控制10 口)输出低
Abstract:Ultrasonic is commonly used in the measurement of distance and displacement due to its strong directivity, slow energy consumption and long transmission distance in the medium. Based on IAP15W4K58S4 microcontroller, a simple, portable and low cost ultrasonic ranging system is designed. The design of ultrasonic transmitting circuit, ultrasonic receiving circuit, temperature compensation and system software are mainly introduced. After testing, the system can achieve stable, reliable and accurate distance measurement. Keywords; Ultrasonic; distance measurement; IAP15W4K58S4; piezoelectrie effect
毕业设计-超声波多普勒效应测速仪的设计
毕业设计-超声波多普勒效应测速仪的设计嘉应学院物理与光信息科技学院超声波多普勒效应测速仪一、题目分析本设计为本次实验设计大赛基础题,其设计的原理基于多普勒效应。
题目的任务为:设计与多普勒效应相关的实验,观测其物理现象,基于实验测量数据分析被测对象的物理过程(物理量)。
要求:(1)突出实验的物理原理;(2)体现作品的物理创新思想;(3)进行不确定度分析;(4)操作简易、可用于实验教学;(5)性价比高。
从题目命题来看,目的非常明确,就是设计一个实验使之能观测多普勒效应并能测定相关物理量。
实现这个基本点的基础上,要求体现作品的物理创新思想与实用性。
再者,实验装置成本低,性能好。
创新的一个基本认识是:通过创造或引入新的技术、知识、观念或创意创造出新的产品、服务、组织、制度等新事物并将其应用于社会,以实现其价值的过程。
价值包括其经济价值、社会价值、学术价值和艺术价值等。
这里要求设计能够体现物理创新思想,即意味着设计需要另辟蹊径,走一条新路子。
至少要避开实验室已有的传统的实验设计方案。
实用性明确:操作简易,可用于实验教学。
这就要求设计人性化,易于交互,原理明确,测量准确。
性价比指标则要求控制成本,在实现同样的功能前提下其成本更加低廉。
为此首先必须正确理解多普勒效应。
多普勒效应描述的是波源或观察者,或者两者同时相对于介质有相对运动时,观察者接收到的波的频率与波源的振动频率不同,即发生了频移。
由此可知,这一实验设计的基本任务必须立足几点:(1)波源选择。
多普勒效应是一切波动过程的共同特征,它适用的对象是波。
机械波与电磁波(光波)均可作为本次实验设计的分析对象。
水波、声波、光等都可以作为波源。
波源选择不同,其对应的检测方法不同,难度也不一样。
(2)设置合适的接收装置,便于观测和定量分析。
1 学生实践与科技创新中心嘉应学院物理与光信息科技学院(3)测量对象。
利用多普勒效应可以测量物体的运动速度、液体的黏度[1]等。
超声波电源驱动电路的设计

超声波电源驱动电路的设计1.确定系统需求:首先需要确定超声波电源需要工作的额定频率、输出电压和输出电流等参数。
这些参数将决定后续电路设计的具体方案。
2.选取功率器件:根据系统需求选择合适的功率器件,通常可以选择MOSFET或IGBT作为功率管。
考虑到超声波电源需要驱动较高频率的超声波换能器,因此功率器件需要具备快速开关特性和低开关损耗。
3.设计驱动电路:超声波电源的驱动电路一般采用半桥或全桥拓扑。
在半桥拓扑中,一个高侧和一个低侧功率管分别连接到超声波换能器的两端。
在全桥拓扑中,两个高侧功率管和两个低侧功率管都连接到超声波换能器的两端。
这两种拓扑各有优劣,选择时需要根据具体应用需求和功率管的成本来确定。
驱动电路的设计需要考虑到对功率器件的驱动信号的控制,保证合适的开关特性和工作频率。
4.设计保护电路:超声波电源在工作过程中可能会面临过电流、过温和短路等问题,因此需要设计相应的保护电路。
一般情况下,可以通过电流传感器和温度传感器等元件来实现对超声波电源的保护。
5.设计反馈控制回路:为了使超声波电源能够稳定输出设计的电压和电流,需要设计反馈控制回路。
该回路可以通过采集输出端的电压和电流信号,并调整驱动信号来实现对输出的精确控制,实现工作参数的稳定性和精度。
6.电路仿真和优化:在设计完成后,进行电路仿真和优化以确保电路的性能和可靠性。
常用的电路仿真软件有SPICE和PSIM等。
通过仿真可以评估电路的性能指标,并对电路参数进行调整和优化。
7.PCB设计和制作:根据最终确定的电路设计方案,进行PCB板的设计和制作。
在PCB设计中需要考虑电路布局、信号传输和电磁兼容性等问题,以确保电路的稳定性和可靠性。
8.电路测试:完成PCB制作后,对电路进行测试和调试,包括输出电压、输出电流、开关频率等参数的测试。
根据测试结果可以对电路进行调整和优化。
总结:超声波电源驱动电路的设计涉及到系统需求确定、功率器件选择、驱动电路设计、保护电路设计、反馈控制回路设计、电路仿真和优化、PCB设计和制作以及电路测试等多个步骤。
基于单片机的超声波测距系统设计

基于单片机的超声波测距系统设计一、本文概述随着科技的飞速发展,超声波测距技术以其非接触、高精度、实时性强等优点,在众多领域如机器人导航、自动驾驶、工业控制、安防监控等中得到了广泛应用。
单片机作为一种集成度高、控制灵活、成本较低的微控制器,是实现超声波测距系统的理想选择。
本文旨在探讨基于单片机的超声波测距系统的设计原理、硬件构成、软件编程及实际应用,以期为相关领域的科研人员和技术人员提供参考。
本文将首先介绍超声波测距的基本原理和关键技术,包括超声波的传播特性、测量原理及误差分析。
接着,详细阐述基于单片机的超声波测距系统的硬件设计,包括单片机的选型、超声波收发模块的选择与连接、信号处理电路的设计等。
在此基础上,本文将介绍系统的软件设计,包括超声波发射与接收的时序控制、距离数据的处理与显示等。
还将讨论系统的低功耗设计、抗干扰措施以及在实际应用中的优化策略。
本文将通过具体实例,展示基于单片机的超声波测距系统在机器人定位、障碍物检测等场景中的应用,以验证系统的可行性和实用性。
本文期望能为相关领域的研究提供有益的参考,推动超声波测距技术的进一步发展和应用。
二、超声波测距原理超声波测距系统主要基于超声波在空气中的传播速度以及反射原理进行设计。
超声波是一种频率高于20kHz的声波,其传播速度在标准大气条件下约为343米/秒。
在超声波测距系统中,超声波发射器向目标物体发射超声波,当超声波遇到目标物体后,会发生反射,反射的超声波被超声波接收器接收。
测距的原理在于测量超声波从发射到接收的时间差。
设超声波发射器发射超声波的时间为t1,接收器接收到反射波的时间为t2,则超声波从发射到接收所经历的时间为Δt = t2 - t1。
由于超声波在空气中的传播速度是已知的,所以可以通过测量时间差Δt来计算目标物体与测距系统之间的距离D。
距离D的计算公式为:D = V * Δt / 2,其中V为超声波在空气中的传播速度。
在实际应用中,为了确保测量的准确性,通常会采用一些技术手段来减少误差。
《超声波测距仪电路设计》

《超声波测距仪电路设计》超声波测距仪电路设计超声波测距仪是一种常见的测距装置,它利用超声波的传播特性来测量目标物体与测距仪之间的距离。
其基本原理是利用超声波的发射和接收来计算目标物体与设备之间的距离。
超声波测距仪的电路设计包括发射电路和接收电路两部分。
1.发射电路设计超声波测距仪的发射电路主要包括发射器、脉冲发生电路和驱动电路。
发射器是将电能转换为声能的装置,一般采用压电陶瓷材料。
脉冲发生电路是用来产生发送的超声波脉冲信号的电路,常用的是555定时器芯片,通过设置合适的频率和占空比,可以实现超声波脉冲的产生。
驱动电路主要是将脉冲信号放大,并提供足够的电流和电压来驱动发射器。
2.接收电路设计超声波测距仪的接收电路主要包括接收器、放大电路和信号处理电路。
接收器是将接收到的声波信号转换为电信号的装置,常用的是压电陶瓷材料。
放大电路主要是将接收到的微弱信号放大到合适的电平,以便后续的信号处理。
信号处理电路包括滤波器和放大器,滤波器用于滤除杂散信号,放大器用于放大清晰的接收信号。
3.其他设计考虑除了发射电路和接收电路,还需要考虑一些其他设计因素。
第一,为了减小测量误差,需要加入合适的校准电路来对测量系统进行校准。
第二,为了方便使用,可以加入显示电路,将测量结果以数字或者模拟形式显示出来。
第三,为了提高抗干扰能力,可以加入滤波器和抗干扰电路来滤除干扰信号。
总之,超声波测距仪电路设计需要考虑发射电路、接收电路以及其他设计因素,合理配置各个部分的电路参数,并利用合适的元器件和电路拓扑结构,以提高测距仪的精度和稳定性。
在实际设计中,还需要考虑功耗、成本和尺寸等因素,以满足具体应用的要求。
超声波电源驱动电路的设计

结果的讨论与改进
结果讨论
在实验结果的基础上,我们对超声波电源驱动电路的性能进行了深入的讨论, 并探讨了可能影响电路性能的各种因素。
改进方案
根据实验结果和讨论,我们提出了一些改进方案,例如优化电路设计、选用更 高性能的元件、加强散热等,以提高超声波电源驱动电路的性能。
05
结论
工作总结
01
完成了超声波电源驱动电路的原理设计,实现了电 路的基本功能。
3
可以进一步拓展该电路的应用领域,例如在医疗、 环保、工业等领域中发挥更大的作用。
感谢观看
THANKS
可靠性
指超声波电源驱动电路的稳定性和寿命,是 评价电路质量的重要指标。
03
超声波电源驱动电路的设计
电路拓扑结构的选择
1 2
线性电源
输出电压与输入电压成正比,适用于对电压精度 要求高的场合。
开关电源
通过开关管控制能量传输,效率高,适用于大功 率应用。
3
脉冲宽度调制(PWM)电源 通过调节脉冲宽度来控制输出电压,具有较好的 调节性能。
优化目标
以效率、稳定性、体积和成本等为目标进行优 化。
优化方法
采用遗传算法、粒子群算法等智能优化算法进行优化。
04
实验与测试
实验设备与测试方法
实验设备
超声波电源驱动电路、超声波换能器 、信号发生器、示波器、万用表等。
测试方法
对超声波电源驱动电路进行性能测试 ,包括输出电压、电流、频率等参数 的测量,以及电路的效率、稳定性等 方面的评估。实 Nhomakorabea结果与分析
实验结果
在实验中,我们得到了超声波电源驱动电路的输出电压、电 流、频率等参数的测量结果,以及电路的效率、稳定性等方 面的评估数据。
基于UCC3895的行波型超声波电机驱动器设计
第 2期
宋人权 , : 等 基于 U C 8 5的行波型超声波电机驱动器设计 C 39
・1 3 ・ 9
运动 的 。从 驱 动 原理 上 和 压 电 陶瓷 性 能可 知 , 动 行 驱 波 型 超 声 波 电机 , 须 需要 两 路 有 一定 相 位差 的正 弦 必 交 流 电压 输入 …。其 原 理框 图如 图 l 所示 。
机 的驱动 器通 用性 。
功率放大 电路 的输 出应满足压 电陶瓷的正常工 作范 围 , 6 m波 电机为例 , 以 0 m 则输 出应能保证在
10V 6 0V( 0 ~ 0 峰峰 值 ) 。 除频 率调 节 调速 外 , 声 波 电机 如 要 实 现正 反 转 超
限于控制难度较大和电路过 于复杂等原 因, 难以实际
() 2
从 式 ( )可 以看 出 ,1R最小步进 为 1 2 TP ,若取
T P = 0 , : I R 30 0 则
图 1 超 声 波 电机 驱 动 器 原 理 图
图 1中所 示 为 目前 较 为 成 熟 的行 波 型超 声 波 驱
a :× 6 f 51 器 1 = 00 一 川z
S ONG R n q a e — u n,W ANG Ja ,GUO J— e g in i fn
( o e eo lc i l n ier g Z e a gU iesy H n zo 0 7 C ia C l g f et c g ei , h j n nvri , a gh u3 2 , hn ) l E raE n n i t 1 0
d i r a ein db sd o i M S a v n e h s h us i hmo ua o ( WM) o t l r C 3 9 . h lv n crut a d r e s s e ae nB C O d a c d p aes i p l w d d lt n P v w d g t f e t i c nr l C 8 5 T er e a t i i n oe U e c s
超声波测距仪的设计方案

超声波测距仪的设计方案一、引言超声波测距仪广泛应用于工业领域中的距离测量需求。
本文将介绍一种超声波测距仪的设计方案,以满足高精度、稳定性和可靠性的要求。
二、设计原理超声波测距仪的设计基于超声波测距原理,即通过发送超声波信号到目标物体,并测量回波信号的时间差来计算距离。
具体设计方案如下。
1. 发射装置为保证发射的超声波信号稳定且具有较高的频率精度,我们选用一种高品质的压电陶瓷振荡器作为发射装置。
该振荡器能够提供稳定的超声波信号,并具有快速响应和较低的失真率。
2. 接收装置为捕获和处理回波信号,我们采用一个高灵敏度的超声波接收器。
该接收器能够有效接收和放大回波信号,并通过滤波和放大电路将其转化为数字信号。
3. 信号处理为了准确计算距离,我们使用微处理器进行信号处理。
微处理器通过测量发射与接收之间的时间差,并根据声速来计算出距离。
三、主要模块设计为确保超声波测距仪的可靠性和性能,我们将其设计分为以下几个主要模块。
1. 信号发射模块该模块由压电陶瓷振荡器和驱动电路组成。
振荡器负责产生高频稳定的超声波信号,驱动电路用于提供所需的电源和信号放大。
2. 信号接收模块该模块包括超声波接收器、放大电路和滤波电路。
超声波接收器接收回波信号,并将其放大后传递给滤波电路,以去除噪声和杂散信号。
3. 信号处理模块该模块由微处理器和相关电路组成。
微处理器负责计算距离,并将结果显示在相关显示装置上。
四、性能优化与安全保障为提高超声波测距仪的性能并确保使用过程中的安全可靠,我们采取以下措施。
1. 信号干扰处理在设计中加入了信号滤波电路和抗干扰电路,以防止外界干扰对测距精度的影响。
2. 电源管理采用高质量的电源管理模块,以确保供电稳定并防止电源的波动对测距仪的正常工作产生影响。
3. 结构设计在外壳设计中考虑到机械强度和防水性能,以保证超声波测距仪在各种环境下的可靠性和耐用性。
五、应用场景超声波测距仪的设计方案可以广泛应用于以下情景:1. 无人驾驶超声波测距仪可用于无人驾驶汽车中的障碍物检测和距离测量,以确保行驶安全。
一种高频超声波换能器驱动电路的设计 -回复

一种高频超声波换能器驱动电路的设计-回复高频超声波换能器驱动电路是一种常用于医学诊断、工业应用和科学研究的装置。
它能将电能转化成超声波能量,实现超声波的产生和控制。
本文将详细介绍一种设计高频超声波换能器驱动电路的步骤和过程,以供读者参考和学习。
第一步:了解超声波换能器驱动电路的基本原理在设计之前,我们需要先了解超声波换能器驱动电路的基本原理。
换能器是将电能转化为机械振动或声能的设备。
而超声波换能器则是将电能转化为超声波能量的换能器。
超声波是频率高于人耳可听到范围(20kHz)的声波,具有穿透力强、分辨率高等特点,因此在医疗、工业和科学领域得到广泛应用。
第二步:确定工作频率和输出功率需求在设计高频超声波换能器驱动电路之前,需要确定工作频率和输出功率的需求。
超声波换能器的工作频率通常在多兆赫范围内,不同应用场景对频率和输出功率的需求有所差异。
例如,在医疗领域,常用的工作频率为1-20MHz,而输出功率则取决于具体应用要求。
第三步:选择合适的换能器和驱动电路元件根据工作频率和输出功率的需求,选择合适的超声波换能器和驱动电路元件。
换能器的选择要考虑其频率响应特性、灵敏度等因素,而驱动电路元件的选择要考虑其工作可靠性、效率等因素。
常用的超声波换能器包括压电换能器、磁致伸缩换能器等。
第四步:设计驱动电路的基本结构设计驱动电路的基本结构包括发生器、放大器和保护电路。
发生器用于产生高频信号,放大器将发生器输出的信号放大到足够的电压和电流水平以驱动换能器,而保护电路则用于保护换能器和电路免受过电压和过电流等因素的损害。
第五步:细化驱动电路的设计细节在设计驱动电路的过程中,需要注意以下几个关键问题:1. 发生器的选型和设计,包括选用合适的振荡电路和频率调节方式;2. 放大器的选型和设计,包括选用合适的功率放大器和放大方式;3. 保护电路的设计,包括过电压保护、过电流保护和温度保护等;4. 电路布线和连接方式的设计,包括尽可能减小导线的阻抗、降低干扰和提高信号传输质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6 实验与结论 利用所设计的原理样机在试验室进行实验得到的波形,样机的预定指标为:发射端驱动传感器电压的峰峰值>36 V;接收端可以检测到峰峰值>2 V的电压。
图8(a)为全桥逆变电路中通过DSP内部软件程序的编写,实现的死区控制的驱动波形,死区时间设定为0.8 μs;图8(b)为发射端的驱动传感器的波形,频率为40 kHz,峰峰值为51.3 V;图8(c)为接收端未经过处理的波形,电压峰峰值为226.1 mV;图8(d)为接收端经过处理的波形,电压峰峰值为9.9 V。 最终的结果都达到了预期的目标,实现了相应的功能,且长时间工作电路中所有元件均无过热现象。
在火力发电厂的锅炉运行中,一次风煤粉的准确测量对锅炉的安全经济运行起着重要的作用。缺乏可靠的一次风煤粉浓度的监测手段,锅炉极易发生火焰中心偏斜、燃烧不稳等情况,从而导致锅炉局部结焦、高温腐蚀,锅炉热效率下降,严重时直接引起锅炉灭火事故[1-3]。煤粉颗粒在一次风中的运动过程是非常复杂的气固两相流动,煤粉浓度的测量一直是工程上的前沿问题之一,也是工程技术人员致力解决的难题[2,4]。因此,研究一次风煤粉浓度测量技术,寻求适合电厂锅炉在线测量煤粉浓度的方法,有着十分重要的意义。从已经发表的文献来看[5],应用计算机对煤粉锅炉风粉系统进行在线监测的技术改造已经非常普遍,在监测对象和流量测量方式上各有特色,但是主要集中在各个支路的风量的准确测量和监测系统的数字化,对煤粉浓度准确测量和煤粉浓度在线测量系统的研究开发比较少。 本文将电力电子技术与计算机控制技术相结合,设计了一种超声波收发装置的测量系统。该装置的发射电路以型号为TMS320F2812的DSP为核心控制芯片,采用单相全桥逆变电路,发射端的频率可以精确控制,采用Boost升压电路使发射端的驱动电压灵活可调,接收电路使用四阶有源模拟滤波器,抗干扰能力强。1 测量原理 声速法是利用不同固相浓度条件下具有不同声速来完成相浓度测量。与现有的各种方法相比,它具有一些特殊的优点,如测量结果与固相成分、颗粒的粒度分布以及当地流速无关;自清洁作用可防止传感器污染;没有堵塞问题等。2 超声波收发装置的总体结构 超声波发射与接收电路的硬件框图。DSP芯片TMS320F2812是整个系统的核心控制部件,用来产生40 kHz的超声波信号源,并控制相应的电路对所发出的超声波形进行调节控制,超声波接收传感器接收到的信号被放大器放大后,经过四阶有源带通滤波器,使接收的信号更加稳定可靠。
超声波传感器接收到的微弱信号经过放大器放大后,为了提高信噪比,通常要对信号进行滤波处理。本接收电路采用MAX275有源带通滤波器来实现滤波功能,减小温漂、零漂和直流偏置,提高信噪比,从而满足接收电路高精度和高稳定性的要求。 为获得阻带内的最大衰减,提高Q值,采用四阶滤波器设计,可通过将MAX275内部的两个二阶滤波器级联实现,即A部分的输出接B部分的输入,电路图。更为方便的设计方法是使用MAXIM274/275有源滤波器设计软件(在MAXIM网站上可免费下载),根据滤波器的性能指标,如中心频率f0、带内最大衰减、阻带内最小衰减、通带宽度、阻带宽度、Q值等,软件就会执行相关命令,程序会分析结果,自动装入数据,并显示各级的实际连接框图和外接电阻的阻值,该带通滤波电路的中心频率为40 kHz,Q值为10,带通增益为8 dB。
发射电路的功能是在外接的压电式超声传感器上施加40 kHz的交流电压,进而发射出超声波;接收电路的功能是对压电式传感器输出的微弱感应电动势进行调理输出。3 超声波发射装置 发射电路由单相全桥逆变电路和Boost电路组成,整体由DSP芯片进行控制。单相全桥逆变电路使发射频率可以精确控制,Boost电路使得驱动传感器的电压灵活可调。 图2为单相全桥硬件电路设计图,图中Q1~Q4选用的是MOSFET管 IRF630,它能承受200 V电压,25℃时承受电流9.0 A,90℃时承受电流5.7 A,满足设计要求,栅极和源极之间的驱动电压在10 V~20 V之间,而且其关断与开通电压的时间都在17 ns左右,相比设计中超声波的周期25 μs(频率40 kHz)已经足够快了,能够满足设计要求。这四只管子构成了单相全桥电路的两个桥臂,,此时的输出电压Uo为+Ud;当开关Q2、Q3闭合,Q1、Q4断开时,单相全桥电路之间又出现一个回路,此时的输出电压Uo为-Ud,这样就把直流电变成了交流电,改变两组开关的切换频率,即可改变输出交流电的频率;改变桥臂两端的电压就可以改变输出交流电压的峰峰值的大小,基于这样的原理就可以产生所需要的超声波传感器发生端所需要的交流电[6]。
5 系统软件设计 该软件的设计主要是完成以下两个功能:完成单相全桥逆变器的控制,使之能够产生40 kHz的超声波传感器的驱动交流电;通过外部中断控制Boost电路中开关管的占空比,实现超声波驱动电压的可调。 图6为40 kHz的超声波发生程序流程图,首先配置相应系统寄存器,通过计数寄存器的值与设定比较寄存的值相比较,当两者相等时GP定时器产生下溢中断,波形完成一次跳变,这样如此循环即可产生40 kHz的超声波;图7为改变Boost电路两端电压的程序流程图,首先在主程序最前面进行外部中断函数的申明,完成相应寄存器的配置,设定下降沿有效,当接收到下降沿信号时,改变相应寄存器的值,使得控制Boost电路中开关管的占空比发生改变,完成调压功能。
超声波功率驱动与测量装置设计
摘 要: 在超声波法测量的理论基础上开发设计了一次风煤粉浓度测量系统。测量系统的硬件部分主要包括超声波传感器驱动电路、超声波接收电路和控制电路部分。驱动电路的主要拓扑结构为单相全桥逆变电路,接收电路主要由两级放大电路和滤波电路实现。控制芯片选择TI公司的TMS320F2812型号的DSP芯片,其内部程序在CCS3.3环境下编写。关键词: 超声波; 单相全桥; 功率变换; DSP; 带通滤波
为了增强DSP芯片GPIO口的驱动能力,防止后面电路的电压或电流对DSP芯片造成损坏,在连接驱动电路时给驱动芯片的接口加上一个非门74LS04。驱动芯片选择IR2103来实现,电源电压为+12 V的电压,自举电容为0.01 μF。 为了防止同一桥臂的上下两个管子同时导通造成短路现象,在DSP芯片里面设置了死区时间,PWM1和PWM2是带有死区时间且互补的两路PWM信号,频率为40 kHz。 图2中的单相全桥桥臂两端的电压Ud由Boost电路提供,Boost电路硬件电路图。
当开关管Q导通时,二极管接Ui的负极,承受反压而截止。电容C向负载R供电,极性上正下负。电源电压Ui全部加到电感两端UL=Ui,在该电压的作用下电感
由式(8)可知Dc是一个小于1的数,因此输出电压与输入电压的比值始终大于等于1,即输出电压高于输入电压,在电源输入电压Ui不变的情况下,输出电压Uo随着PWM波形占空比的变化而变化。 图3中的PWM驱动信号和图2中的原理一样,二极管D选用快恢复的肖特基二极管IN4148,为了使电感上的电流连续,纹波在1%,并考虑一定的裕量,这里选择铁氧体材质的功率电感150 μH,考虑到纹波以及电压大小容量的问题,电容选择两个47 μF耐压值为100 V的电容并联,为了防止电阻两端的电压过高时电阻烧坏,选择功率为2 W的1 kΩ电阻。4 超声波接收装置 接收电路的作用就是将接收换能器输出的微小电信号经过充分放大而得到足够大的信号,以便处理器能够识别处理。发射接收电路的原始接收信号数量级为毫伏甚至微伏。,在电路中采用以TLC2272为核心的放大电路,TLC2272是单芯片双运放放大器,与其他CMOS型放大器相比,具有高输入阻抗、低噪声、低输入偏置电流、低功耗的优点,并且具有轨对轨的输出特性,因此其动态应用范围大,可以提供2 MHz的带宽和3 V/μs的摆率。,R1是作为接收时的匹配电阻,该电阻阻值影响放大后正弦波的波形质量,其放大倍数由R3与R2的比值决定。