温度控制器调节步骤说明书
温湿度控制器的使用说明书

温湿度控制器的使用说明书使用说明书概述:感谢您选择使用我们的温湿度控制器。
本使用说明书将为您提供操作指导和详细参数说明,帮助您更好地使用该产品。
产品概述:本产品是一种具有温湿度检测与控制功能的设备,适用于室内温湿度的自动调节。
产品采用先进的传感器技术,控制精度高,性能稳定可靠,易于操作和安装,广泛应用于温室、工厂、药厂、实验室、仓库等场所。
使用方法:1.安装及接线本产品提供多种安装方式,用户可按照需要选择合适的方式进行安装。
为了保证操作安全,请先停止电源,并确认电路无电之后再进行接线。
2.操作电源启动后,本产品会自动开始检测环境温湿度,并将检测结果在屏幕上显示。
用户可通过屏幕上的按键调节目标温湿度值和工作模式。
也可通过RS485接口与计算机通信,进行实时数据采集和监测。
3.注意事项1)本产品请勿直放在阳光下或潮湿的环境中,避免受到过度照射或受潮而影响正常使用。
2)请勿随意打开产品外壳,以免影响产品性能。
3)为了保证产品性能,建议定期进行校准和维护,以确保其工作精度与可靠性。
4)本产品配有过温、过湿等保护功能,当环境温湿度超出设定范围时,控制器会自动停止工作,以避免对设备和环境的影响。
参数说明:1)功率电源:AC220V±10% 50/60HZ2)温度测量范围:-40℃~+100℃3)湿度测量范围:0%~100%RH4)温控精度:±0.5℃5)湿度控制精度:±5%RH6)安装方式:支持多种安装方式,包括嵌入式、壁挂式等。
结论:温湿度控制器是一种高性能、高精度的温湿度自动调节设备,适用于不同场合的使用需求。
本使用说明书提供了详细的产品参数和操作方法,我们相信您通过本说明书的阅读和理解,一定能更好地使用本产品。
同时,本公司也期待着您宝贵的建议和意见,以便更好地为您提供服务。
温度控制器的使用说明书
温度控制器的使用说明书一、产品简介温度控制器是一种用于调节温度的装置。
它通过感知环境温度的变化,并根据设定参数来控制加热或制冷设备的工作状态,以达到温度控制的目的。
本使用说明书旨在帮助用户正确操作和使用温度控制器,提供详细的使用指南和注意事项。
二、产品外观1. 温度控制器的外观设计简洁美观,采用灰色塑料外壳,具有良好的手感和耐用性。
2. 正面面板采用液晶显示屏,可清晰显示当前温度、设定温度以及其他相关信息。
3. 控制按钮位于正面面板下方,用户可通过按钮进行参数设置和操作。
三、使用方法1. 安装a) 在使用温度控制器之前,请先确保断电状态,并按照产品手册提供的安装步骤进行正确安装。
b) 将温度控制器固定在合适的位置,并确保其与被控制的设备连接牢固、接线正确。
2. 参数设置a) 打开温度控制器电源,系统将自动启动并显示当前温度。
b) 按下设置按钮进入参数设置模式,并使用上下按钮选择要设置的参数。
c) 通过加减按钮调节参数数值,确认后按下确认按钮保存设置并退出设置模式。
d) 确保设定的温度范围和控制模式与实际需求相匹配。
3. 运行控制a) 在参数设置完成后,温度控制器将自动开始工作。
在正常工作状态下,控制器将根据设定温度和当前温度进行判断,并控制相关设备的启停。
b) 温度控制器具备过温保护功能,当探测到温度超过设定范围时,控制器将自动切断电源,避免设备过热。
四、注意事项1. 使用前请阅读并确保理解本使用说明书的所有内容,遵循说明书提供的正确操作方法和注意事项。
2. 请勿将温度控制器暴露在恶劣的环境条件下,如强烈阳光直射、高温、潮湿或腐蚀性气体影响的场所等。
3. 温度控制器仅适用于指定的电压和电流范围,请勿使用超过规定的电源供应。
4. 如需更换温度探头,请关闭电源并按照说明书提供的步骤进行更换,以免发生触电或其他意外伤害。
5. 若长时间不使用温度控制器,请将其断电并保存在干燥通风的地方,以延长使用寿命。
温度控制仪操作规程

温度控制仪操作规程
《温度控制仪操作规程》
一、操作前准备
1. 确保温度控制仪的电源已经连接并处于开机状态。
2. 检查温度传感器是否正确连接到被控制的设备。
3. 检查控制仪的显示屏是否正常,并且显示出当前温度和设定温度。
二、设定温度
1. 按下“设定”按钮,进入设定模式。
2. 使用“上下”按钮调整设定温度值。
3. 按下“确认”按钮,保存设定温度值。
三、启动控制
1. 按下“启动”按钮,控制仪开始工作。
2. 控制仪会根据设定温度值和实际温度值进行控制操作,保持设定温度稳定。
四、停止控制
1. 在需要停止控制时,按下“停止”按钮。
2. 控制仪停止工作并显示当前温度值。
五、异常处理
1. 如果控制仪显示异常或者操作不正常,应立即停止控制并查找故障。
2. 请参考使用手册或者联系供应商进行故障处理。
六、操作注意事项
1. 操作时应注意安全,避免触碰到高温表面。
2. 操作人员应具备一定的专业知识和技能,以保证设备正常使用。
3. 定期对控制仪进行维护保养,保证设备的正常运行。
总结:本操作规程详细介绍了温度控制仪的操作步骤和注意事项,操作人员应严格按照规程执行,确保设备的安全和稳定运行。
301温度控制器操作说明书
2
5.7 定时器功能表 …………………………………………………………… 10 5.8 报警类型 ………………………………………………………………… 10 5.9 报警解除 ………………………………………………………………… 11 6 程序升温 ………………………………………………………………… 11 6.1 设定升温及保温程序 …………………………………………………… 11 7 最大功率输出设置 ……………………………………………………… 12 8 用户校准 ………………………………………………………………… 12 8.1 出厂校准 …………………………………………………………………… 12 8.2 单点校准 …………………………………………………………………… 13
温控器PID调节方法

温控器PID调节方法比例(proportion)调节:是按比例反应系统的偏差,比例(P值)越小引发同样调节的所需的偏差越小,(即同样偏差引起的调节越大,即P值与调节作用成反比)可以加快调节,减少误差,但可使系统的稳定性下降,甚至不稳定。
比例越大,所需偏差越大,系统反应越迟钝。
积分(integral)调节:是使系统消除稳态误差,提高无差度。
只要有误差,积分调节就进行,直至无差,积分调节停止。
积分作用的强弱与积分时间常数(完成一次积分所需的时间)I值成反比。
积分时间短,调节作用强。
积分时间长,动态响应慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分(differential)调节:微分反映系统偏差信号的变化率。
能预见偏差变化的趋势,产生超前的控制作用,,减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此D值太大,对系统抗干扰不利。
微分调节作用的大小与微分时间成正比。
微分作用需要与另外两种调节相结合,组成PD或PID控制器。
PID参数整定顺口溜参数整定斩乱麻,P I D 值顺序查调节作用反反正,小步试验找最佳曲线振荡很频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动摆得快,积分时间再加长,曲线振荡频率快,先把微分降下来动差大来波动慢。
微分时间应加长理想曲线两个波,前高后低4比1一看二调多分析,调节质量不会低。
比例:,加热电流与偏差(即实际值和设定值之差)成比例。
P的大小,在数量上是调节器闭环放大倍数的倒数。
P = 偏差电压∕调节器输出电压比例带越小(P越小),开始时调节电压上升越快,但易过冲。
当温差变小,实际比例越接近P,电压越小。
例如:设定温控于60度,在实际温度为20和40度时,加热的功率就不一样。
积分:如果长时间达不到设定值,积分器起作用,进行修正。
加热电流与偏差的累积(积分)成比例。
因此,只要有偏差存在,尽管偏差极微小,但经过长时间的累积,就会有足够的输出去控制炉丝加热电流,去消除偏差,减少小静态误差。
欧姆龙温度控制器中文手册

欧姆龙温度控制器中文手册1、产品介绍1.1 产品概述欧姆龙温度控制器是一种用于温度调节和监测的设备,能够实时监测目标对象的温度并通过控制输出来调节温度。
1.2 产品特点- 高精度温度监测:欧姆龙温度控制器可以提供高精度的温度监测,确保目标对象的温度得到准确测量。
- 稳定的温度控制:通过控制输出,欧姆龙温度控制器能够实现对目标对象的温度进行稳定控制,确保温度在设定范围内保持稳定。
- 多种控制模式:欧姆龙温度控制器支持多种不同的控制模式,包括PID控制、ON/OFF控制等,以满足不同的应用需求。
- 友好的用户界面:欧姆龙温度控制器具有直观的用户界面,易于操作和设置。
1.3 适用范围欧姆龙温度控制器适用于需要对温度进行调节和监测的各种应用场景,包括工业生产、实验室研究等。
2、产品安装与设置2.1 安装要求在安装欧姆龙温度控制器时,需满足以下要求:- 安装位置应远离高温、湿度、振动和腐蚀性气体等因素。
- 与电源线和信号线的布线应符合相关安全规范。
- 温度探头应与目标对象接触良好,以确保温度测量的准确性。
2.2 设置步骤以下是设置欧姆龙温度控制器的步骤:1.连接电源线和信号线:将电源线和温度探头的信号线分别连接到欧姆龙温度控制器的相应接口上。
2.打开电源:将电源线插入电源插座,并打开电源开关。
3.进入设置模式:按下欧姆龙温度控制器的设置按钮,进入设置模式。
4.设置参数:根据实际需求,设置目标温度、控制模式、控制范围等参数。
5.保存设置:设置完成后,按下保存按钮,保存设置参数。
6.开始控制:按下启动按钮,欧姆龙温度控制器开始工作。
3、产品使用说明3.1 温度调节欧姆龙温度控制器通过调节控制输出来实现对目标对象温度的调节。
根据不同的控制模式,控制输出可以采用不同的方式,比如调节加热器功率或开关状态。
3.2 温度监测欧姆龙温度控制器可以实时监测目标对象的温度,并将温度值显示在用户界面上。
用户可以通过监测结果了解目标对象的温度变化情况。
空调温度控制器使用说明
空调温度控制器使用说明一、功能介绍1.温度设定:可通过控制器上的温度调节按钮,设置室内所需的温度值。
2.开关控制:控制器上有一个开关按钮,用于打开和关闭空调。
3.显示屏幕:控制器上配有一个显示屏幕,用于显示当前设置的温度和空调的工作状态。
二、使用步骤1.开机:将空调温度控制器插入电源插座,按下开关按钮,显示屏幕上将出现相关信息并开始工作。
2.设定温度:按照实际需求,通过温度调节按钮,调整显示屏幕上的温度值,使其与所需温度相符。
3.开启空调:确认温度设定正确后,按下开关按钮,空调将开始工作,并根据设定的温度进行冷暖调节。
4.调整温度:若需调整室内温度,可再次按下温度调节按钮,逐渐增加或减小设定的温度值,直至满足需求。
5.关闭空调:当室内温度达到设定值或不再需要空调时,再次按下开关按钮,空调将停止工作。
三、注意事项1.温度设定:在设定温度时,应根据实际需求来合理设定,避免过度制冷或过度加热。
2.空调运行时间:空调的连续运行时间一般不宜过长,建议适当间隔时间,以免造成能源浪费或设备过热。
3.清洁和维护:定期清洁空调和控制器,防止灰尘堵塞和故障发生。
在清洁时,请先关闭空调和拔掉电源,并使用软布轻轻擦拭表面,不要使用任何腐蚀性物质。
4.使用环境:空调温度控制器适用于室内使用,请避免长时间暴露在潮湿、高温或直接阳光下。
四、常见问题解答1.控制器显示屏幕没有显示任何信息?-检查是否已插入电源,并确认电源是否正常工作。
-检查电源线是否已经连接到控制器。
2.设定的温度和实际室内温度有差异?-确认空调是否正常工作。
-检查是否有其他因素影响室内温度,如门窗是否关好等。
3.控制器按键无法正常操作?-可尝试重启控制器,或将电源线重新插拔一次。
五、安全提示1.使用时请遵循相关安全指导,避免因错误操作造成人员伤害或设备损坏。
M9温控表PID温度控制器调节器说明书
pid温控器说明书PID调节器使用经验:1、以被控对象特性选择控制器要获得良好控制效果,首先要正确选用PID调节器,PID调节器选型相对复杂,对于有经验的用户大多是按照自己的实践经验来确定PID调节器。
(1)常规工艺参数控制通常选用单回路PID调节器。
单回路调节器有一路信号输入,控制设定及参数修改通过仪表参数设定完成。
(2)正反转控制的电动执行机构选用的带伺服放大器阀位控制调节器。
带伺服放大器阀位控制调节器输入信号为两路(测量值和阀位反馈值),仪表将单回路PID调节器和伺服放大器功能融合在一起。
(3)如果被控对象需要不同时段以不同控制指标进行过程控制,应选用程序控制调节器。
程序控制调节器可以按时间分段设置不同的控制目标值和PID参数,轻松实现工艺控制要求。
(4)串级控制通常由一台单回路PID调节器和一台外给定调节器构成,也可以选用一台可编程序调节器。
可编程序调节器功能强大,便于实现温度、压力、流量、液位PH、酸度、浑浊度等控制项目的串级、选择、批量、交叉、比值、数学运算等复杂的连续过程控制,价格也略高。
(5)温控仪也是一种PID调节器,特别是生产过程中要求对温度按照工艺曲线变化、超调小或无超调、控温稳定性好的场合,对温控仪的控制效果就有些苛刻!在PID参数整定合理、控制方案不存在问题情况下,不同厂家固化在PID调节器芯片内的控制算法程序不同,不同品牌温控仪的温度控制效果也就存在很大差别,所以再此特别提醒:不是所有名称为“温控仪”的仪表都能将温度控制到你所期望到达的水平,选择需谨慎。
(6)所有数字调节器均P、I、D功能,但并不是所有工况都同时用到这三个功能。
2、正确选择PID调节器正反作用数字调节器的正反作用是用软件通过参数设定来选择。
调节器控制输出随被控量增加而增加,我们称调节器处于正作用状态;调节器控制输出随被控量增加而减小,我们称调节器处于反作用状态。
任何一个闭环控制系统均由变送器、调节器、执行器、被控对象四个环节组成的,应从这四个环节放大系数的乘积为负来判断PID调节器正/反作用。
OMEGA CN2000 温度控制器PID三模式调节指南说明书

Temperature ControlTuning a PID (Three Mode) ControllerTuning a temperature controller involves setting the proportional, integral, and derivative values to get the best possible control for a particular process. If the controller does not include anautotune algorithm, or if the autotune algorithm does not provide adequate control for the particular application, then the unit must be tuned using trial and error.The following is a tuning procedure for the OMEGA CN2000 controller. It can be applied to other controllers as well. There are other tuning procedures which can also be used, but they all use a similar trial and error method. Note that if the controller uses a mechanical relay (rather than a solid state relay), a longer cycle time (20 seconds) should be used when starting out.The following definitions may be needed:1) Cycle time - Also known as duty cycle; the total length of time for the controller to complete one on/off cycle. Example: with a 20 second cycle time, an on time of 10 seconds and an off time of 10 seconds represents a 50 percent power output. The controller will cycle on and off while within the proportional band.2) Proportional band - A temperature band expressed in % of full scale or degrees within which the controller‘s proportioning ac-tion takes place. The wider the proportional band, the greater the area around the setpoint in which the proportional action takes place. This is sometimes referred to as gain, which is the reciprocal of proportional band.3) Integral, also known as reset, is a function which adjusts the proportional bandwidth with respect to the setpoint to com-pensate for offset (droop) from setpoint; that is, it adjusts the controlled temperature to setpoint after the system stabilizes.4) Derivative, also known as rate, senses the rate of rise or fall of system temperature and automatically adjusts the proportional band to minimize overshoot or undershoot.A PID (three mode) controller is capable of exceptional con-trol stability when properly tuned and used. The operator can achieve the fastest response time and smallest overshoot by following these instructions carefully. The information for tuning this three mode controller may be different from other controller tuning procedures. Normally a SELF TUNE feature will eliminate the need to use this manual tuning procedure for the primary output; however, adjustments to the SELF TUNE values may be made if desired.After the controller is installed and wired:1. Apply power to the controller.2. Disable the control outputs if possible.3. For time proportional primary output, set the cycle time. Enter the following value:CYCLE TIME 15 SEC (Only appears if output is a time proportional output. A smaller cycle time may be required for systems with an extreme-ly fast response time.)Then select the following parameters:PR BAND 1 ______5% (PB)RESET 1 ________0 R/M (TURNS OFF RESET FUNCTION)RESET 2 ________0 R/MRATE 1 _________0 MIN (TURNS OFF RATE FUNCTION)RATE 2 _________0 MINNOTEOn units with dual three mode outputs, the primary and second-ary tuning parameters are independently set and must be tuned separately. The procedure used in this section is for a HEATING primary output. A similar procedure may be used for a primary COOLING output or a secondary COOLING output.A. TUNING OUTPUTS FOR HEATING CONTROL 1. Enable the OUTPUT(S) and start the process.2. The process should be run at a setpoint that will allow the temperature to stabilize with heat input required.3. With RATE and RESET turned OFF, the temperature will stabilize with a steady state deviation, or droop, between the setpoint and the actual temperature. Carefully note whether or not there are regular cycles or oscillations in this temperature by observing the measurement on the display. (An oscillation may be as long as 30 minutes.) The tuning procedure is easier to follow if you use a recorder to monitor the process temperature.Figure 1. Temperature OscillationsPRIMARY TIMEDivide PB by 2 if you observe this. TIMEThis is close to perfect tuning.TIMEMultiply PB by 2 if you observe this.4. If there are no regular oscillations in the temperature, divide the PB by 2 (see Figure 1). Allow the process to stabilize and check for temperature oscillations. If there are still no oscillations, divide the PB by 2 again. Repeat until cycles or oscillations are obtained. Proceed to Step5.If oscillations are observed immediately, multiply the PB by 2. Observe the resulting temperature for several minutes. If the oscillations continue, increase the PB by factors of 2 until the oscillations stop.5. The PB is now very near its critical setting. Carefully in-crease or decrease the PB setting until cycles or oscillations just appear in the temperature recording.If no oscillations occur in the process temperature even at the minimum PB setting of 1%, skip Steps 6 through 11 below and proceed to paragraph B.6. Read the steady-state deviation, or droop, between setpoint and actual temperature with the “critical” PB setting you have achieved. (Because the temperature is cycling a bit, use the average temperature.)7 Measure the oscillation time, in minutes, between neigh-boring peaks or valleys (see Figure 2). This is most easily accomplished with a chart recorder, but a measurement can be read at one minute intervals to obtain the timing.8. Now, increase the PB setting until the temperature devia-tion, or droop, increases 65%.The desired final temperature deviation can be calculated by multiplying the initial temperature deviation achieved with the CRITICAL PB setting by 1.65 (see Figure 3) or by use of the convenient Nomogram I (see Figure 4). Try several trial-and-error settings of the PB control until the desired final temperature deviation is achieved.9. You have now completed all the measurements necessary to obtain optimum performance from the Controller. Only two more adjustments are required - RATE and RESET.10. U sing the oscillation time measured in Step 7, calculate the value for RESET in repeats per minutes as follows: RESET = 8 x 1 __ __ 5 T OWhere T O = Oscillation Time in Minutes. OR Use Nomogram II (see Figure 5):Enter the value for RESET 1.11. A gain using the oscillation time measured in Step 7, calcu-late the value for RATE in minutes as follows: RESET = T O __ 10Where T O = Oscillation TimeOR Use Nomogram III (see Figure 6)Enter this value for Rate 1.12. I f overshoot occurred, it can be eliminated by decreasing the RESET time. When changes are made in the RESET value, a corresponding change should also be made in the RATE adjustment so that the RATE value is equal to: RATE = 1 ______________ 6 x Reset Valuei.e., if reset = 2 R/M, the RATE = 0.08 min.13. S everal setpoint changes and consequent RESET and RATE time adjustments may be required to obtain the proper balance between “RESPONSE TIME” to a system upset and “SETTLING TIME.” In general, fast response is accompanied by larger overshoot and consequently shorter time for the process to “SETTLE OUT.” Conversely, if the response is slower, the process tends to slide into the final value with little or no overshoot. The requirements of the system dictate which action is desired.14. W hen satisfactory tuning has been achieved, the cycle time should be increased to save contactor life (applies to units with time proportioning outputs only (TPRI)). Increase the cycle time as much as possible without causing oscillations in the measurement due to load cycling.15. P roceed to Section C.TEMPERA TURE CYCLE TIME IN MINUTESCORRECT RESET SETTING IN REPEA TS PER MINUTE0.120100.20.353211230.500.300.2010200.100.05300.030.02100TRMPERA TURE CYCLE TIME IN MINUTESCORRECT RA TE SETTING IN MINUTES5440503032201100.330.220.110.030.30.020.20.010.1Figure 2. Oscillation TimeFigure 3. Calculating Final Temperature Deviation3ϒFigure 4. Nomogram IFigure 6. Nomogram IIIFigure 5. Nomogram IIB. TUNING PROCEDURE WHEN NO OSCILLATIONSARE OBSERVED1. Measure the steady-state deviation, or droop, betweensetpoint and actual temperature with minimum PB setting.2. Increase the PB setting until the temperature deviation(droop) increases 65%. Nomogram I (see Figure 4)provides a convenient method of calculating the desired final temperature deviation.3. Set the RESET 1 to a high value (10 R/M). Set the RATE1 to a corresponding value (0.02 MIN). At this point, themeasurement should stabilize at the setpoint tempera-ture due to reset action.4. Since we were not able to determine a critical oscilla-tion time, the optimum settings of the reset and rateadjustments must be determined by trial and error. After the temperature has stabilized at setpoint, increase the setpoint temperature setting by 10 degrees. Observe the overshoot associated with the rise in actual temperature.Then return the setpoint setting to its original value and again observe the overshoot associated with the actual temperature change.Excessive overshoot implies that the RESET and/orRATE values are set too high. Overdamped response(no overshoot) implies that the RESET and/or RATE val-ues are set too low. Refer to Figure 7. Where improved performance is required, change one tuning parameter at a time and observe its effect on performance whenthe setpoint is changed. Make incremental changes inthe parameters until the performance is optimized.5. When satisfactory tuning has been achieved, the cycletime should be increased to save contactor life (applies to units with time proportioning outputs only (TPRI)). Increase the cycle time as much as possible without causing oscilla-tions in the measurement due to load cycling.C. TUNING THE PRIMARY OUTPUT FOR COOLINGCONTROLThe same procedure is used as for heating. The process should be run at a setpoint that requires cooling control before the temperature will stabilize.D. SIMPLIFIED TUNING PROCEDURE FOR PID CON-TROLLERSThe following procedure is a graphical technique of analyz-ing a process response curve to a step input. It is much easier with a strip chart recorder reading the process vari-able (PV).1. Starting from a cold start (PV at ambient), apply fullpower to the process without the controller in the loop,i.e., with an open loop. Record this starting time.2. After some delay (for heat to reach the sensor), the PVwill start to rise. After more delay, the PV will reach amaximum rate of change (slope). Record the time atwhich this maximum slope occurs and the PV at which it occurs. Record the maximum slope in degrees perminute. Turn off system power.3. Draw a line from the point of maximum slope back to theambient temperature axis to obtain the lumped system time delay Td (see Figure 8). The time delay may alsobe obtained by the equation:Td = time to max. slope-(PV at max. slope - Ambient)/max. slope 4. Apply the following equations to yield the PID param-eters:Pr. Band = Td x max. slope x 100/span = % of spanReset= 0.4 / Td = resets/minuteRate = 0.4 x Td = minutes5. Restart the system and bring the process to setpoint withthe controller in the loop and observe response. If theresponse has too much overshoot, or is oscillating, then the PID parameters can be changed (slightly, one at atime, and observing process response) in the following directions:Widen the proportional band, lower the Reset value, and increase the Rate value.Example: The chart recording in Figure 8 was obtained by applying full power to an oven. The chart scales are 10°F/ cm, and 5 min/cm. The controller range is 100 to 600°F, or a span of 500°F.Maximum slope = 18°F/5 minutes= 3.6˚F/minuteTime delay = Td = approximately 7 minutes.Proportional Band = 7 minutes x3.6°F/minutes x 100/500°F = 5%.Reset = 0.4/7 minutes = 0.06 resets/minuteRate = 0.4 x 7 minutes = 2.8 minuteTuning a PID Controller Cont’dORESET OR RA TE T OO HIGH RESET OR RA TE T OO LOWFigure 7. Setting RESET and/or RATEFigure 8. System Time Delay。
温控器调节方法
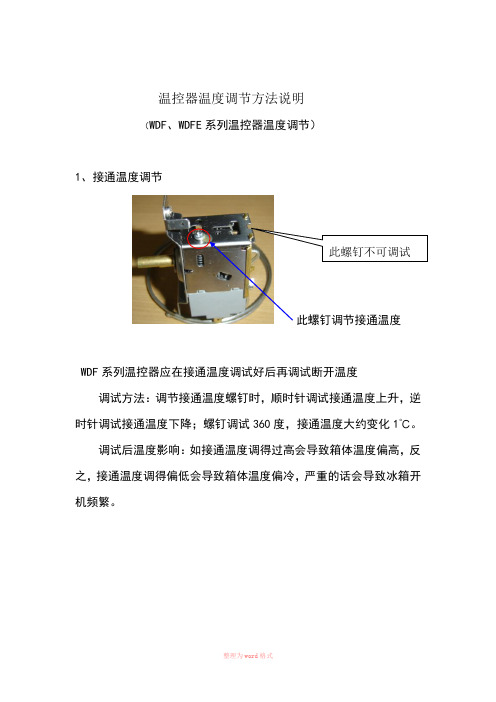
温控器温度调节方法说明(WDF、WDFE系列温控器温度调节)1、接通温度调节此螺钉不可调试此螺钉调节接通温度WDF系列温控器应在接通温度调试好后再调试断开温度调试方法:调节接通温度螺钉时,顺时针调试接通温度上升,逆时针调试接通温度下降;螺钉调试360度,接通温度大约变化1℃。
调试后温度影响:如接通温度调得过高会导致箱体温度偏高,反之,接通温度调得偏低会导致箱体温度偏冷,严重的话会导致冰箱开机频繁。
2、断开温度调节调试方法:调节断开温度螺钉时,顺时针调试断开温度下降,逆时针调试断开温度上升;螺钉调试360度,断开温度大约变化1℃。
调试后温度影响:如断开温度调得过高会导致箱体温度偏高,严重的话会导致冰箱开机频繁;反之,断开温度调得偏低会导致箱体温度偏冷,严重的话会导致冰箱不停机。
常州西玛特电器有限公司技术部2007-7-7K59型温控器是美国伦科(RANCO)公司生产的定温开机型温控器,目前我们国内电冰箱产品上所用的多为由青岛引进生产的K59(WDF)型温控器。
该温控器性能非常稳定,一般情况下不会出现损坏报废的情况。
偶尔出现开停机不正常时,都可以通过调整温控器的参数调整螺钉解决,前提是电冰箱的制冷状况必须正常或基本正常。
如果制冷太差,参数相差太大,温控器调整余量可能达不到所需要求,必须先解决制冷不足的问题。
如果制冷稍有不足,使得温控器不能按正常状况进行控制开停机,就可以通过调整温控器使其与现有的制冷状况相匹配,达到正常的开停机控制。
调整温控器时,应正确的选择调整螺丝、调整方向以及正确的掌握调整量,避免越调越乱,达不到调整效果。
我现在把这种温控器的外形、调整螺丝的位置和各个调整螺丝的性能特点通过图形标注出来,以供参考:此主题相关图片如下:K59温控器属于定温开机型温控器。
所谓定温开机,是指温控器的档位无论在那个位置,所控制的开机温度都是一个温度点,也就是说调整温控器档位时,只能改变停机温度而不会改变开机温度。
养殖温控器使用说明书
养殖温控器使用说明书
尊敬的客户,首先感谢您选用本公司的产品:
●请按照规定的额定电流使用,严禁超载。
●严格执行电工标准、准确按照接线图进行接线。
一、使用环境
●本产品专为养殖用户设计,可用于潮湿的环境,但不可浸入水中使用。
●使用时请将探头线穿入埋线管中,放置于需要测温的地方,切勿将探头直接埋入水泥砂浆。
二、技术指标
●温度设定范围:5~50℃(可定制)
●温度测量范围:0~99℃
●温控精度:±1℃
●电源电压:AC220V±20% 50Hz
●额定功率:3000W
●额定电流:16A
●外形尺寸:73mm*104mm*39mm
三、操作说明
1.开关机:按键可开机或关机。
2.温度设置:按∧或∨键,设定温度闪烁,可按∧或∨键调节目标温度,按键确认并返回,无操作20秒自动确认。
备注:温控器在加热状态下,红色指示灯亮起。
温控器在不加热状态下,指示灯不亮。
四、接线方式
红(L)黄(H)绿(N)黑蓝
负载
- 1 -
电源探头
备注:L为进电火线,H为负载火线,N为公共零线。
五、故障诊断
开机状态下,显示“1F”并闪烁,代表探头断路。
开机状态下,显示“1N”并闪烁,代表探头短路。
- 2 -。
温度控制器(KSW-6-16)使用说明书

温度控制器〔KSW-6-16)使用说明书一、简介KSW-6-16型号温度控制器为1300℃电炉的配套设备,与铂铑—铂热电偶配套使用,可对电炉内的温度进行测量、显示、控制,并可使炉膛内的温度自动保持恒温。
以硅碳棒为加热元件的高温电阻炉,其加热元件的冷态与热态时的电阻值相差较大,在长期使用中硅碳棒的电阻值将逐渐变大〔也称之为老化〕。
所以必须与调压设备配套使用,KSW-6-16型号的温度控制器具有温度控制和电压调节二种功能,该温度控制器的温度显示有数字显示和指针显示二种,其中尤以固态继电器为执行元件并配以数字显示的控制器性能更为优越。
二、结构与工作原理温度控制器的外壳由钢板冲压折制成型并采用铝合金框架结构,外壳表面采用高强度的静电喷涂,漆膜光滑牢固。
控制器的前部装有温度控制仪表、电压表、电流表和电源开关。
控制器的内部装有可控硅〔固态继电器〕、线路板与螺旋保险和接线端子等电器元件。
该温度控制系统采用了优质电子集成元件,控温灵敏、性能可靠、使用方便。
其工作原理:热电偶将电炉内部的温度转换为毫伏电压值,经过集成放大器的放大、比较后,输出移相控制信号,有效地控制可控硅的导通角,进而控制硅碳棒的平均加热功率,使炉膛内的温度保持恒温。
三、设备的安装与使用3.1 设备安装前应将电炉温度控制器放在平整的工作台上,先进行外观的检查:外观应无破损,仪表外观应完好,电源开关完好,使用说明书、合格证齐全。
安装使用前应仔细阅读产品使用说明书并按其要求进行安装与操作。
3.2 指针式温度控制仪表的设定与使用:指针式温度控制仪表应先观察仪表指针是否指在零位,如不在零位,可左右轻微地调节仪表的机械调零螺钉,使之对正即可。
根据不同的工作温度,将设定温度旋钮上的白色标记指到相应的温度上。
红灯亮表示停止加热,绿灯亮表示加热,红绿灯交替亮灭表示进入时间比例加热段或恒温段。
该仪表最高控制温度为1600℃。
3.3 数字式温度控制仪表设定与使用:数字式温度控制仪表不需要调零,将测量/设定开关拨到设定位置后,旋转设定旋钮,温控仪表显示的数字即设定的工作温度。
CH402型温度控制器使用说明书

附:CH402型温度控制器使用说明书一简介:该温度控制器利用精密的铂电阻来传递温度信号,采用先进的内部控制模块,优化了各个控制参数之间的关系,并进一步加强了自适应功能在各种条件的适应调节的功能,使之在温度控制方面表现得更为突出。
CH402的电源输入可选用工频交流电220V,直流24V;输入可以是电阻信号,也可以使用热电偶;继电器输出为24V直流电;另外CH402还具有报警输出端。
二CH402的面板1——PV 实际温度显示(绿色显示)。
2——SV 设定温度显示(桔红显示)。
3——AT 自调节功能显示(绿灯)。
OUT1 输出控制显示(绿灯)。
ALM1 报警输出显示(红灯)。
OUT1 ALM1 未扩展。
4——SET 用来选择设定各个参数的键。
5——R/S 用来改变数据位(参数设定时),控制温控器的开关。
6——用于数字的减少(参数设定时)。
7——用于数字的增加(参数设定时)。
三:CH402显示信息说明在刚接通电源的时候,CH402会显示:然后显示:随后即为正常工作显示,在设定参数时,PV会显示各种功能的代表符号,特列举在下:各符号功能列表附:表一四:参数设定说明:1、在使用SET键功能时:按一下,即SV温度可设,R/S为选择所要改动的数据位;按定SET键超过2秒钟,既出现表中所列的功能选项,再按SET键,可选择需要设定的参数项,R/S为选择所要改动的数据位。
各位数字的调节则由另外两键来调节。
2、在使用R/S的开关功能时,也需要按住R/S超过1秒后。
3、使用自动调节的功能时,外界环境与正常实验时相同,温度的变化必须是一个完整连续的过程,这样才能获得一系列比较满意的自调参数,任何的中途的关闭,断电,参数的另行设定,都会使自调节功能的失败。
4、自适应功能使用时,PID参数应设好,该功能再进行参数改变,一般情况下,可以不用。
5、自动调节功能与自适应功能不可以同时使用。
6、当温度探头所探测到的温度变化有不正常的大幅波动(突升,突降)超过了警告设定值时,则报警红灯亮。
温度控制器使用说明书
温度控制器使用说明书一、产品概述温度控制器是一种用于控制和调节温度的设备。
它可以实时监测环境温度,并按照预设的温度范围进行自动控制,以确保温度保持在设定值内。
二、产品组成1.主机:包含显示屏、按键和控制电路等组件,用于设置和监控温度控制器的工作状态。
2.传感器:用于感知环境温度的变化,并将其转化为电信号,传输给主机进行处理。
3.输出端口:用于连接外部设备,如加热器、冷却器等,以实现温度调节。
三、使用步骤1.连接电源:将温度控制器插入电源插座,并确保电源稳定。
2.连接传感器:将传感器插入温度控制器的传感器接口中,并确保连接牢固。
3.设置温度范围:按照产品说明书中的指引,通过按键设置所需的温度范围。
4.连接外部设备:根据需要,使用合适的电缆将外部设备连接至温度控制器的输出端口上。
5.开机:按下电源按钮,温度控制器将开始运行,并在显示屏上显示当前温度及工作状态。
6.调试和调节:根据实际需要,适时调整温度控制器的参数,以达到预期的温度控制效果。
四、注意事项1.请确保温度控制器在通风良好的环境中工作,避免遮挡或靠近高温的物体。
2.避免温度控制器长时间暴露在潮湿、尘土等有害环境中,以免影响正常使用寿命。
3.使用前请认真阅读产品说明书,并按照要求正确操作,以免因误操作导致设备损坏或操作失误。
4.在设置温度范围时,请合理选择上下限,避免因温度波动过大造成设备故障或无法达到所需温度。
5.如遇到温度控制器异常工作或其他问题,请及时联系售后服务中心进行咨询或维修。
五、常见问题解答1.温度控制器显示屏无法正常工作怎么办?答:请检查电源接口是否接触良好,确认电源供电充足,并检查是否有异常开关或损坏的部件。
2.温度控制器无法控制温度在设定范围内怎么办?答:请确认传感器连接是否正确,温度控制器和外部设备的连接是否稳固,并适时调整温度范围和控制参数。
3.温度控制器显示温度与实际温度不一致怎么办?答:请检查传感器的位置是否合理,避免受到外部干扰,如阳光直射或其他热源等。
温度控制器调试技巧说明书

温度控制器调试技巧说明书一、前言温度控制器是一种用来监测和调节温度的装置,广泛应用于工业生产和实验室实验等领域。
本说明书旨在帮助用户更好地了解温度控制器的调试技巧,确保其正常运行和高效性能。
二、调试前准备在开始调试温度控制器之前,我们需要做好以下准备工作:1. 检查供电:确保温度控制器已正确连接到稳定的电源,并保持供电稳定。
2. 校准传感器:检查温度传感器的准确性,并将其校准到目标温度。
3. 准备测试设备:根据实际需求,准备好用于测试的设备,如加热器或冷却器等。
三、调试步骤1. 设置目标温度:根据需要,通过操作面板或者远程控制设备,设置温度控制器的目标温度。
2. 检查温度响应:观察温度控制器对温度变化的响应速度和稳定性。
如果有任何异常,可以调整控制器的相关参数,如PID参数等。
3. 验证温度控制:逐步调整加热器或冷却器的功率,并观察温度是否能够稳定在目标温度附近。
如果控制不住温度波动,可以调整控制器的温度干扰补偿参数。
4. 测试报警功能:通过改变温度传感器的状态或超过温度范围来测试温度控制器的报警功能。
确保报警功能正常并能够及时响应。
5. 记录参数:在调试过程中,及时记录温度控制器的各项参数,包括控制方式、温度波动范围、报警设定等。
6. 性能评估:通过长时间运行和模拟实际操作环境等方式来评估温度控制器的性能。
如果有任何问题,可根据实际情况调整参数或者寻求专业支持。
四、常见问题及解决方法1. 控制不住温度波动:可能是因为PID参数设置不合理,可适当调整参数或者使用自适应控制算法。
2. 温度控制器不稳定:可能是因为供电不稳定或者传感器准确性差,可检查供电稳定性并校准传感器。
3. 报警响应慢:可能是报警参数设置不合理,可调整报警的温度范围或者报警延迟时间。
4. 温度控制器超出范围:可能是温度范围设置错误,可检查和调整温度范围设置。
五、使用注意事项1. 定期检查温度控制器的供电情况,确保电源稳定。
2. 温度控制器应该安装在干燥、通风良好的环境中,避免阳光直射或与其他热源接触。
温度控制器操作说明书

温度控制器操作说明书一、产品概述温度控制器是一种用于自动调控设备温度的智能电子仪器。
通过采集温度数据,并根据预设的温度范围进行控制,实现精确的温度控制和调节。
本操作说明书将为您详细介绍温度控制器的使用方法和注意事项。
二、产品外观和组成1. 外观描述温度控制器外观小巧精致,采用黑色塑料材质。
正面配备液晶显示屏和按键控制区域,底部有插孔用于连接传感器。
整体设计简洁大方,符合人体工学原理,易于操作。
2. 组成部件温度控制器由以下主要部件组成:(1) 显示屏:采用液晶技术,以数字方式实时显示当前温度和设定温度。
(2) 控制按键:包括上、下、确定等按键,用于设置和调节温度参数。
(3) 传感器插孔:用于插入温度传感器连接线,将温度数据输入到控制器中。
三、使用方法1. 上电及初始化将温度控制器插头与电源插座连接,按下控制器背面的电源开关,控制器即可供电并初始化显示正常。
2. 温度控制设置(1) 按下控制器上的“设定”按钮,进入温度设定模式。
(2) 使用上下按键选择您需要的温度设定值,按下“确定”按钮确认设定。
3. 温度读数显示(1) 控制器将实时显示当前温度数值,您可以通过温度单位按钮切换摄氏度或华氏度显示。
(2) 当温度达到设定值时,控制器将发出声音提示,并停止加热或制冷操作。
4. 温度报警功能(1) 温度控制器具备温度报警功能,当温度超出设定范围时,控制器将发出报警声音,并在显示屏上闪烁提示。
(2) 若出现温度超出设定范围的情况,请立即检查设备故障并采取相应措施以避免损坏。
5. 温度控制模式切换温度控制器支持手动模式和自动模式的切换。
您可以根据需要选择手动模式或自动模式进行温度控制。
(1) 手动模式:您可以通过手动设定的方式控制温度升高或降低。
(2) 自动模式:温度控制器将根据您设定的温度范围自动进行温度控制,保持设备处于所需的温度状态。
四、注意事项1. 使用环境请确保在干燥、通风良好的环境中使用温度控制器,并避免阳光直射、潮湿或过于高温的环境。
SX101温控器调节温度的说明书

SX101温控器调节温度的说明书
1、温控器是电子计量产品,其使用寿命为五年,每年需进行周期检验。
2、本温控器只能按照本公司规定的目的和方法使用。
未经授权的修改和使用非本公司所出售或推荐的零配件都有可能导致本系统出现故障,甚至损坏。
3、使用前请您详细阅读该说明书。
设计部门的工作人员请重点参阅性能指标、外形尺寸、机械安装及电气连接;安装人员请重点参阅外形尺寸、机械安装、电气连接及异常现象处理;使用人员请重点参阅基本操作及异常现象处理。
4、每台温控器在使用前应进行功能测试,以保证使用的可靠性及测量、控制的精度。
5、温控器在运输时应采用原包装,以免造成机械损坏。
6、温控器不使用时,请进行防潮处理。
7、温控器使用时应注意电源等级(无特殊说明时,一般为AC220V)。
8、当您准备使用温控器时,请仔细阅读该说明书的电气连接部分,确认连接无误后再给温控器送电!
9、为保证温控器输入信号质量,温控器正常运行前务必拧紧传感器插头。
10、在干式变压器进行耐压测试前,必须将传感器插头与温控
器分离,以避免温控器被损坏。
11、切勿用打火机等明火对传感器探头进行模拟温升试验,否则会损坏Pt100传感器。
12、避免在含有二氧化硫(SOz)或其他腐蚀性气体的环境中使用本温控器,否则会使继电器的触点失效。
DTD 系列温度控制器 说明书
րЕޘଠטጡፆү͘Ί!非常感谢您选用台达产品,请在使用前,详细阅读本使用说明书,并将手册放置于易拿处以便参考。
ڦຍְีڦຍĊᑝПᐍĊ当电源上电时,请勿触摸AC接线端,以免遭致电击。
检查输入电源时,请确认电源是关闭的。
本机为开放型装置,因此当要使用在危险的应用场合,如:会造成人员严重伤害及其它设备损坏,请确认将其安装至自动故障安全防护装置设备上。
1. 请使用适合M3螺丝的压接端子(最大宽度7.2mm),端子螺丝在锁紧时请勿过度用力。
确认配线接到正确适当的端子。
2. 如果有尘土或金属残渣掉入机身,可能会造成误动作。
请勿修改或擅自拆卸本控制器。
空余端子请勿使用。
3. 安装时离开高电压及具有强高周波噪声的地方以防止干扰。
在会发生以下情况的场所避免使用此控制器:(a) 灰尘过多及有腐蚀性气体;(b) 高湿度及高辐射;(c) 震动及冲击。
4. 实施配线时和更换温度传感器时,务必关闭电源。
5. 热电偶对的引线要延长时或有结线的场合请依热电偶对的种类务必使用补偿导线。
6. 白金测温阻抗体的引线延长时或有结线的场合,请使用阻抗体的物体。
7. 由测温体到控制器本体的配线路请用最短距离配线,为了避免噪声及诱导的影响尽可能把电源线和负载配线分开。
8. 本机器为开放型机壳,必须安装在具防尘、防潮及免于电击∕冲击的外壳配电箱内。
9. 上电前请确认电源∕信号装配是否正确,否则可能造成严重损坏。
10. 上电时请勿接触机体端子或进行维修,否则可能遭致电击。
11. 切断电源一分钟之内,线路未完全放电,请勿接触内部线路。
请使用干布清洁本机器,勿使用含有酸、碱的液体清洁。
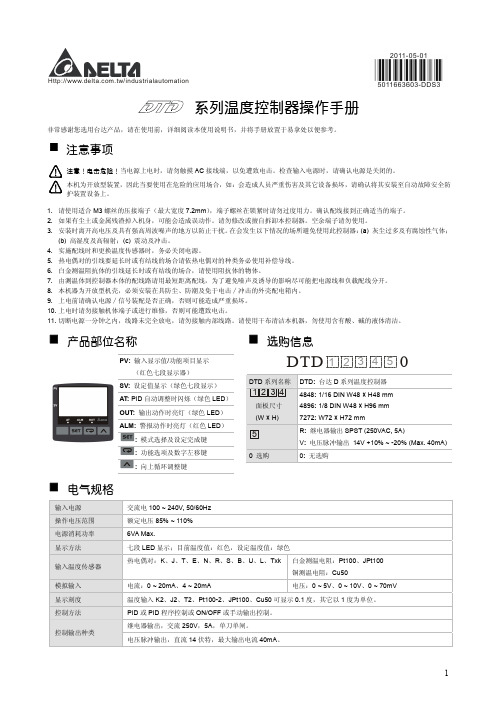
யݡొҜЩჍ!PV: 输入显示值/功能项目显示(红色七段显示器)SV: 设定值显示(绿色七段显示)AT: PID自动调整时闪烁(绿色LED)OUT: 输出动作时亮灯(绿色LED)ALM: 警报动作时亮灯(红色LED): 模式选择及设定完成键: 功能选项及数字左移键!: 向上循环调整键Ᏼᔉܫि!DTD012345ঈఢॾ输入电源交流电100 ~ 240V, 50/60Hz操作电压范围额定电压85% ~ 110%电源消耗功率 6VAMax.显示方法七段LED显示;目前温度值:红色,设定温度值:绿色输入温度传感器热电偶对:K、J、T、E、N、R、S、B、U、L、Txk白金测温电阻:Pt100、JPt100铜测温电阻:Cu50模拟输入电流:0 ~ 20mA、4 ~ 20mA 电压:0 ~ 5V、0 ~ 10V、0 ~ 70mV显示刻度温度输入K2、J2、T2、Pt100-2、JPt100、Cu50可显示0.1度,其它以1度为单位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
温度控制器调节步骤说明书
一、引言
温度控制器是一种常见的电子设备,用于精确控制温度,广泛应用于工业、农业、医疗等领域。
本文将详细介绍温度控制器调节步骤,以帮助用户正确操作和调节温度控制器。
二、准备工作
在开始温度控制器的调节之前,需要进行一些准备工作,以确保调节的准确性和安全性。
1. 检查温度控制器的电源是否已连接,并确保电源正常工作。
2. 确保温度控制器的传感器已正确安装并与被控温区连接。
3. 如果温度控制器具有外部控制接口,如继电器输出或通信接口,需要按实际需求进行连接。
三、基本操作
1. 开机和显示状况
打开温度控制器电源,观察显示屏,确保屏幕正常显示。
通常,温度控制器会显示当前温度、设定温度和控制状态等信息。
2. 设定温度
使用温度控制器上的调节按钮或旋转开关,将设定温度调整至所需
温度。
确保按照所需的温度单位(摄氏度或华氏度)进行设定,并适
当调整设定精度。
3. 控制模式选择
根据实际需要,选择合适的控制模式。
常见的控制模式包括比例控制、比例积分控制和比例积分微分控制等。
根据被控温区的特性和控
制要求,选择最合适的模式并将其设定在温度控制器中。
4. 输出控制
根据温度控制器的输出类型和被控设备的类型,设置输出控制。
一
般情况下,温度控制器的输出可分为继电器输出、模拟电压输出或模
拟电流输出等。
根据实际需要,将输出类型和控制参数进行适当设定。
5. 控制参数调整
根据被控设备和被控温区的特性,调整控制参数,以达到较好的控
制效果。
控制参数通常包括比例系数、积分时间和微分时间等。
通过
逐步调整这些参数,并结合实际反馈进行观察和优化,以实现良好的
控制性能。
四、附加功能调节
某些温度控制器可能还具有特殊的附加功能,如报警功能、自动校
正功能、通信功能等。
根据实际需求,对这些附加功能进行相应的设
置和调节。
五、调节结果验证
在完成温度控制器的调节后,需要对调节结果进行验证,以确保控
制效果满足实际要求。
1. 监控被控温区的实际温度和设定温度,观察两者之间的偏差。
2. 根据被控设备的特性和工作要求,对温度控制器进行负载测试,
以评估其响应速度和稳定性。
3. 根据验证结果,如果需要进一步优化控制效果,可以重新调整控
制参数和设定值,并进行多次验证,直至达到所需的控制效果。
六、安全注意事项
在使用温度控制器进行调节时,应注意以下安全事项,以确保人身
安全和设备正常运行。
1. 遵守电器安全操作规程,确保操作人员具备相关安全知识和技能。
2. 定期检查温度控制器的电源线和传感器线路是否存在磨损、老化
等问题,及时更换损坏的部件。
3. 禁止将温度控制器用于超出其额定参数范围的应用,以避免设备
损坏和人员伤害。
4. 在进行设备维护和检修时,应先切断温度控制器电源,并确保设
备处于安全状态。
七、总结
本文对温度控制器调节的基本步骤进行了详细介绍,希望能够帮助用户正确操作和调节温度控制器。
在实际操作过程中,用户还应结合具体设备和应用要求,对调节步骤进行相应的调整和优化,以取得更好的控制效果。
同时,操作人员应严格遵守安全操作规程,确保操作过程安全可靠。