西门子300PLC与库卡机器人的硬件组态
西门子S7300网络组态
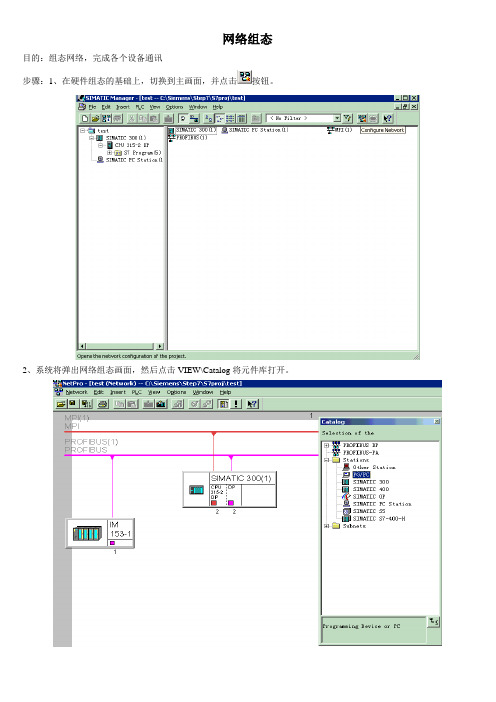
网络组态
目的:组态网络,完成各个设备通讯
步骤:1、在硬件组态的基础上,切换到主画面,并点击按钮。
2、系统将弹出网络组态画面,然后点击VIEW\Catalog将元件库打开。
3、将STA TION下面的PG/PC拖入组态画面中,然后双击PG/PC,弹出PG/PC组态画面,然后点开INTERFACES 页。
点击NEW,选择MPI interface,点OK键。
4、然后弹出MPI组态窗口,将MPI地址设置为0,并将SUBNET中的MPI(1)选中,点击确定。
5、点开Assignment页,选中MPI INTERFACE(1)和PC ADAPTER(MPI);然后点击ASSIGN,再点击‘确定’按钮。
PG/PC组态完成。
6、组态PC STA TION ,将PC –STATION拖入组态画面,将其双击,进入PC-STATION组态画面,
(1),点击确定。
然后点击SA VE AND COMPILE,将组态存盘和编译。
8、点击STA TION\Properties,打开PC STATION 属性画面,点开CONFIGURATION 页。
在中间的框中是PC STA TION 的组态文件的文件夹地址和名称。
我们可以用该文件配置PC机的CP5611网卡。
西门子plc硬件组态设置步骤

西门子plc硬件组态设置步骤西门子plc硬件组态设置步骤S7-300的MPI端口需要组态设置或采用默认设置。
相关的设置:1. MPI。
在WinCC flexible中的“通讯”--“连接”,选择S7-300/400作为驱动,通讯协议选择MPI,通讯速率为187.5K,plc站2,机架号0,扩展槽2;这里的地址和速率要和S7-300硬件组态的MPI端口的地址和速率一致。
2. DP。
在WinCC flexible中的“通讯”--“连接”,选择S7-300/400作为驱动,通讯协议选择DP,通讯速率为1.5M,PLC站2,机架号0,扩展槽2;这里的地址和速率要和S7-300硬件组态的DP 端口的地址和速率一致。
硬件组态步骤:1、双击SIMATICManager图标,打开S;2、点击FILE\NEW,按照图例输入文件名称(;系统将自动生成TEST项目;3、点亮TEST 项目名称,点击右键,选中Inse;将生成一个S7-300的项目,如果项目CPU是S;4、TEST左面的+点开,选中SIMATIC30;即可打开!;5、双击SIMATI步骤: STEP7 系列培训课程——硬件组态目的:生成一个新项目,完成系统硬件配置文件并将其下载,完成系统配置1、双击SIMATIC Manager图标,打开STEP7 主画面2、点击FILE \ NEW,按照图例输入文件名称(TEST)和文件夹地址,然后点击OK;系统将自动生成TEST项目3、点亮TEST项目名称,点击右键,选中Insert new object,点击SIMATIC 300 STATION将生成一个S7-300的项目,如果项目CPU是S7-400,那么选中SIMATIC 400 STATION即可。
4、TEST左面的+点开,选中SIMATIC 300(1),然后选中Hardware并双击/或右键点OPEN OBJECT,硬件组态画面即可打开!5、双击SIMATIC 300\RACK-300,然后将Rail 拖入到左边空白处。
西门子PLC组态方法
西门子PLC组态方法硬件连接软件组态1、在桌面打开S7tgtopx Manager软件2、点击“File”中的“New”新建文件3、输入新建文件的“名称”(如“zourz”)4、右击“zourz”选择“Insert New Object”中的“SIMATIC 400 Station”5、双击“Hardware”6、PLC组态选择“背板”展开“SIMA TIC 400”选择“BACK-400”,在“BACK-400”中选择与背板相对应的编号“6ES7-400-1JA01-0AA0”即“BACK-400”中的“UR2”,双击“UR2”再点击“OK”完成“背板”选择7、选择“PS-400”展开“SIMATIC 400”选择“PS-400”中的“Standard PS-400”,在“Standard PS-400”中选择编号为“6ES7-407-0KA02-0AA0”即“Standard PS-400”中的“PS 407 10A”,双击“PS 407 10A”再点击“OK”完成“PS-400”选择8、选择“CPU”展开“SIMATIC 400”选择“CPU-400”中的“CPU 416-3 PN/DP”,在“CPU 416-3 PN/DP”中选择“V5.3”双击,在弹出的对话框中可以修改IP地址新建“PN网络”点击“New”在弹出的对话框中可以重命名“PN网络”名称,然后点击“OK”,“OK”再点击对话框中的“OK”完成“CPU-400”选择9、选择“CP”展开“SIMATIC 400”选择“CP-400”中的“CP 443-1 Advanced-IT”,在“CP 443-1 Advanced-IT”中选择“6GK7 443-1GX20-0EX0”中的“V2.0”双击,在弹出的对话框中直接点击“OK”完成“CP”选择10、选择“DI”展开“SIMATIC 400”选择“SM-400”中的“DI-400”,在“DI-400”中选择“DI16xDC24VInterrupt”双击,在弹出的对话框中直接点击“OK”完成“DI”选择11、选择“DO”展开“SIMATIC 400”选择“SM-400”中的“DO-400”,在“DO-400”中选择“DO16xDC24V 、2A”双击,在弹出的对话框中直接点击“OK”完成“DO”选择12、选择“AI”展开“SIMATIC 400”选择“SM-400”中的“AI-400”,在“AI-400”中选择“AI16x16Bit”双击,在弹出的对话框中直接点击“OK”完成“AI”选择13、选择“AO”展开“SIMATIC 400”选择“SM-400”中的“AO-400”,在“AO-400”中选择“AO8x13Bit”双击,在弹出的对话框中直接点击“OK”完成“AO”选择14、对组态完的PLC进行“编译”点击“编译”在弹出的对话框中点击“OK”15、对PLC进行“下载”点击“下载”在弹出的对话框中点击“OK”在弹出的对话框中点击“View”在弹出的对话框中选择MAC号位“00-0E-8C-A7-9F-82”的PLC(选择PLC),然后点击“OK”在弹出的三个对话框中都点击“OK”,然后“硬启动”PLC看状态是否正常。
西门子s7-300系列plc硬件组态
可变编址
2x
SIMATIC® S7
Siemens AG 2003. All rights reserved.
Date: File:
2016/4/23 HWConfig.10
SITRAIN Training for
Automation and Drives
硬件组态: 编辑符号名, 监视/修改变量
单击右键
120.0 to 123.7
124.0 to 127.7
PS 机架 2
IM
(接收)
64.0 to 67.7
68.0 to 70.7
72.0 to 75.7
76.0 to 79.7
80.0 to 83.7
84.0 to 87.7
88.0 to 91.7
92.0 to 95.7
PS
机架 1
IM
(接收)
32.0 to 35.7
SIMATIC® S7
Siemens AG 2003. All rights reserved.
Date: File:
2016/4/23 HWConfig.11
SITRAIN Training for
Automation and Drives
CPU 属性:循环 / 时钟存储器
双击
时钟存储器位 频率 (Hz) 周期 (s)
S7-300™模块编址
槽号 1 2 4 5 6 7 8 9 10 11
模块
PS
CPU
SM
SM
SM
SM
SM
SM
SM
SM
地址 0.0 地址 0.7 地址 1.0 地址 1.7
SIMATIC® S7
Siemens AG 2003. All rights reserved.
西门子PLC组态方法

西门子PLC组态方法硬件连接软件组态1、在桌面打开S7tgtopx Manager软件2、点击“File”中的“New”新建文件3、输入新建文件的“名称”(如“zourz”)4、右击“zourz”选择“Insert New Object”中的“SIMATIC 400 Station”5、双击“Hardware”6、PLC组态选择“背板”展开“SIMA TIC 400”选择“BACK-400”,在“BACK-400”中选择与背板相对应的编号“6ES7-400-1JA01-0AA0”即“BACK-400”中的“UR2”,双击“UR2”再点击“OK”完成“背板”选择7、选择“PS-400”展开“SIMATIC 400”选择“PS-400”中的“Standard PS-400”,在“Standard PS-400”中选择编号为“6ES7-407-0KA02-0AA0”即“Standard PS-400”中的“PS 407 10A”,双击“PS 407 10A”再点击“OK”完成“PS-400”选择8、选择“CPU”展开“SIMATIC 400”选择“CPU-400”中的“CPU 416-3 PN/DP”,在“CPU 416-3 PN/DP”中选择“V5.3”双击,在弹出的对话框中可以修改IP地址点击“New”在弹出的对话框中可以重命名“PN网络”名称,然后点击“OK”,“OK”9、选择“CP”展开“SIMATIC 400”选择“CP-400”中的“CP 443-1 Advanced-IT”,在“CP 443-1 Advanced-IT”中选择“6GK7 443-1GX20-0EX0”中的“V2.0”双击,在弹出的对话框中直接点击“OK”完成“CP”选择10、选择“DI”展开“SIMATIC 400”选择“SM-400”中的“DI-400”,在“DI-400”中选择“DI16xDC24V11、选择“DO”展开“SIMATIC 400”选择“SM-400”中的“DO-400”,在“DO-400”中选择“DO16xDC24V 、2A”双击,在弹出的对话框中直接点击“OK”完成“DO”选择12、选择“AI”展开“SIMATIC 400”选择“SM-400”中的“AI-400”,在“AI-400”中选择“AI16x16Bit”双击,在弹出的对话框中直接点击“OK”完成“AI”选择13、选择“AO”展开“SIMATIC 400”选择“SM-400”中的“AO-400”,在“AO-400”中选择“AO8x13Bit”双击,在弹出的对话框中直接点击“OK”完成“AO”选择点击“编译”在弹出的对话框中点击“OK”点击“下载”在弹出的对话框中点击“OK”在弹出的对话框中点击“View”在弹出的对话框中选择MAC号位“00-0E-8C-A7-9F-82”的PLC(选择PLC),然后点击“OK”在弹出的三个对话框中都点击“OK”,然后“硬启动”PLC看状态是否正常。
KUKA工业机器人与S7-1200PLC实现Profinet通讯步骤详解
KUKA工业机器人与S7-1200PLC实现Profinet通讯步骤详
解
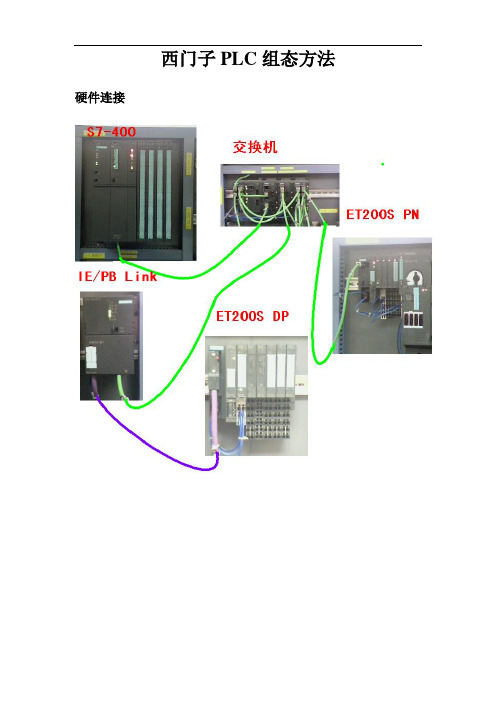
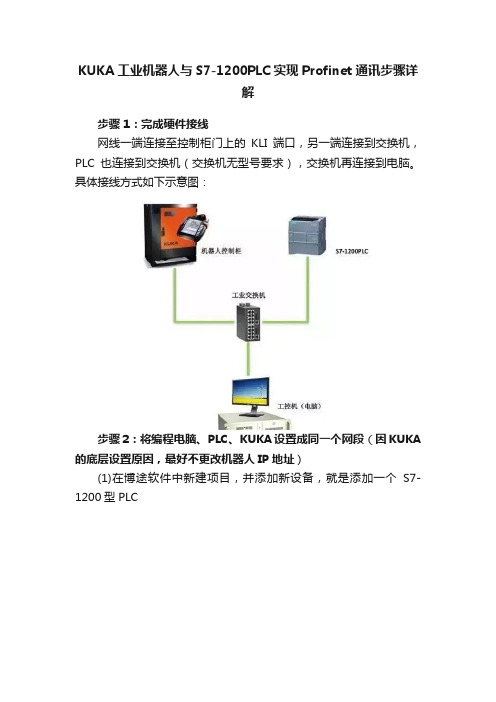
步骤1:完成硬件接线
网线一端连接至控制柜门上的KLI端口,另一端连接到交换机,PLC也连接到交换机(交换机无型号要求),交换机再连接到电脑。
具体接线方式如下示意图:
步骤2:将编程电脑、PLC、KUKA设置成同一个网段(因KUKA 的底层设置原因,最好不更改机器人IP地址)
(1)在博途软件中新建项目,并添加新设备,就是添加一个S7-1200型PLC
(2)点击选项—添加设备描述文件—导入KUKA机器人的GSD文件,这个GSD文件可以在KUKA机器人的示教器存储目录中找到,也可以私信找电气技术微课堂小编索要。
(3)安装GSD,并把KUKA设备进行组态
(4)设置好以上后(包括PLC地址),接下来就可以编译下载到
PLC。
下载完成后PLC会报红灯,是因为下一级组件存在故障,即还没有设置机器人端,连接不到下一级组件,所以报错。
也可以使用此方法判断是否连接成功。
步骤3:WorkVisual对KUKA进行设置
步骤4:激活、添加Profinet、DTM选择Profinet,详细设置过程如下图
步骤5:双击Profinet进行设置
步骤6:进行信号映射
首先生成代码,再下载到控制器,注意在控制器上做好确认工作
步骤7:机器人侧的信号确认:
器人侧即为映射时的IN(..),PLC侧则是在博图里对KUKA设备设置时的IO地址。
kuka机器人与西门子PLC通讯

通过机器人示教器的配置/网络配置将IP地址修改到与PLC同一网段,本例程中的地址为 192.168.0.2。
6、W二o、rkWVorikVsisuuaall中配通讯置配置
第二步:连接机器人
打开WorkVisual—搜索—更新,即可看到机器人项目。 网络连接检测方法:Win+R打开运行表—输入CMD—在打开的页面中输入PING 192.168.0.2
6、W二o、rkWVorikVsisuuaall中配通讯置配置
第三步:通讯配置
右击总线结构—添加—PROFINET—OK 双击项目结构中的PROFINET,弹出PROFINET设置对话框 注意:DeviceName中的名字需要与上位机中的名字一致
勾选Activate对话框,表示激活PROFINET 不使用Safe I/Os时,数量填0 PROFINET Version版本需与上位机种对应 设置完成后依次点击Apply—OK
6、W二o、rkWVorikVsisuuaall中配通讯置配置
编第辑四项步:目关联变量
WorkVisual中单击编辑器中的输入输出接线,打开如下图
1中选择现场总线—PROFINET
2中选择KRC输入/输出端
3中显示所有信号可在此处关联
4中查看已关联变量或者取消关联
6、W二o、rkWVorikVsisuuaall中配通讯Βιβλιοθήκη 配置下第载五项步:目编译下载
将机器人权限更改为专家或以上模式,WorkVisual中单击工具中的安装,弹出窗口中点击完成, 示教器询问中连续点击“是”即可。
镜像网络配置后出现一个急停样式的图标表示使用安全IO,但通常情况下未使用,只需双击设备在弹出的设 备视图中删除安全IO即可。 删除安全IO后
西门子PLC与ABB机器人是如何通讯的?

西门子PLC与ABB机器人是如何通讯的?【ABB机器人有那些通讯方式?】针对工业机器人,我们一般会关注两个方面:运动性能,直接决定了机器人是否能够用于特定的工艺,比如精度和速度;通信方式,直接决定了机器人能否集成到系统中,以及支持的控制复杂度。
通常,ABB机器人支持的通信方式有:(1)普通IO:a)Signalb)Group signal(2)总线:a)Profinetb)Profibusc)DeviceNetd)EthernetIP等(3)网络:a)Socketb)PC SDKc)RWS(robot web service)d)OPCe)RMQ(robot message queue)(4)其他:confidential接下来,我就重点介绍一下西门子博途中S7-300的PLC是如果通过DP与ABB机器人进行通讯的。
1博途TIA的配置在博途软件中新建项目,本案例选取西门子S7-300PLC,其型号为CPU 313C-2DP,该PLC 为集成式的PLC,自带PROFIBUS-DP口,可以作为主站也可以作为从站,在本案例中,PLC作为主站。
在博途软件里,依次点击“选项”、“管理通用站描述文件”如下图:选中GSD文件,并点击安装,安装因电脑而已,可能需要一点时间。
做到这里,PLC与机器人的硬件组态就已经结束,为了保证正确率,我们需要检查主站与从站的地址,默认的情况下,PLC作为主站,其地址为2,Slave_1也就是机器人端默认的地址是3,如下所示:2机器人端设置展开Industrial Network,并确保系统里存在PROFIBUS_Anybus,如下图所示:如果没有出现,则添加,如下图所示:其中,Name位置填入名称,Input Size(bytes)和Output Size(bytes)填入相应的通讯容量,其中最多支持512位,也就是64的字节。
其余内容无需更改,添加完毕后,点击确定。
3PLC侧通讯程序的编写PLC侧的通讯程序较为简单,只需要将对应的位值移动到相应的地址即可,在本案例中,PLC与机器人没从通讯输入输出一个字节。
两个西门子300CPU之间DP通信硬件组态详细过程
接着选择“组态”。。。如图,选择第一行,点”编辑“
出现如图所示页面,设置参数
参数如图所示。。。确定
接着选择第二行,编辑
参数设置如图,,,确定
接着出现如图,确认无误后,确定
接着保存,下载。。。到此,主站建立完毕。。。
主从站设置完成后如下图所示。。。
DP
如图。
设置完成后如图所示。单击确定。
设置完成后如图所示。。。可以看到PROFIBUSDP总线了。
接下来双击DP,如图。。。
然后选择“工作模式”,勾选“DP从站”。。。如图所示。
接下来选择“组态”,,如图。。
出现如图所示界面。。。
然后设置一些参数,如图所示。。确定。
继续点击”新建”,如图
继续设置参数,如图,”确定“下一步。。。
完成后出现如图所示。。。到此,从站建立完毕,“确定”,下一步建立主 站。
再次插入一个300新站点,如图。
单击DP时把地址改成3,如图。然后选择“工作模式”
在“工作模式”下选择“DP主站”。。确定。
在硬件目录中找到CPU 31X。。。拖到DP线上
如图,单击“连接”。。人人网仅提供信息存储空间仅对用户上传内容的表现方式做保护处理对用户上传分享的文档内容本身不做任何修改或编辑并不能对任何下载内容负责
主 题
两个S7-300之间DP网络 组态
序 言
本任务的解决需要使用两个S7-300 作为主从站,连接到PROFIBUSDP通信网络中。 小组成员:鲁成凤 曹礼超 刘启南 孟凡洋。
1.
打开S7-300
2.新建一个文件夹
Байду номын сангаас 3.输入新建文件名称并选择存储的位置
5.现在开始对300的从站进行组态。
工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯引言当今的工业生产领域,工业机器人和可编程控制器(PLC)已经成为了不可或缺的设备。
工业机器人主要用于在生产线上执行重复的、精确的任务,而可编程控制器则用于控制和监控生产线上的各种设备和工艺。
在实际生产中,工业机器人通常需要与可编程控制器进行通讯,以便实现对机器人的控制和监控。
西门子是工业控制领域的知名厂商,其PLC产品在全球范围内得到了广泛的应用。
本文将重点讨论工业机器人与西门子PLC的通讯技术。
工业机器人与PLC的通讯方式工业机器人与PLC的通讯方式主要有两种:以太网通讯和现场总线通讯。
以太网通讯是目前最为流行的通讯方式,它使用工业以太网协议进行数据传输,通常采用TCP/IP协议栈。
现场总线通讯则是基于现场总线技术的通讯方式,主要用于工业设备间的实时数据交换。
以太网通讯以太网通讯是一种高速、可靠的通讯方式,适用于工业机器人与PLC之间的数据交换。
以太网通讯可以实现实时数据传输,能够满足工业生产中对数据传输速度和可靠性的要求,因此被广泛应用于工业自动化领域。
以太网通讯通常采用TCP/IP协议栈,数据传输速度快,通讯稳定可靠。
目前,绝大多数工业机器人和PLC产品都支持以太网通讯,因此工业机器人与PLC之间的通讯多采用以太网通讯方式。
现场总线通讯现场总线通讯是一种针对工业自动化应用的通讯方式,它主要用于连接控制系统和现场设备,实现数据的实时传输和控制。
现场总线通讯能够减少系统的线缆数量,简化系统的安装和维护,提高系统的可靠性和稳定性。
在工业生产中,现场总线通讯通常用于连接传感器、执行器、PLC等设备,实现数据的实时交换和控制。
在一些特定的工业机器人与PLC的通讯场景中,现场总线通讯也被广泛应用。
工业机器人与西门子PLC的通讯方法工业机器人与西门子PLC的通讯方法通常采用以太网通讯方式。
以太网通讯主要包括以太网TCP/IP通讯和PROFINET通讯两种方式。
S7-300硬件组态方法
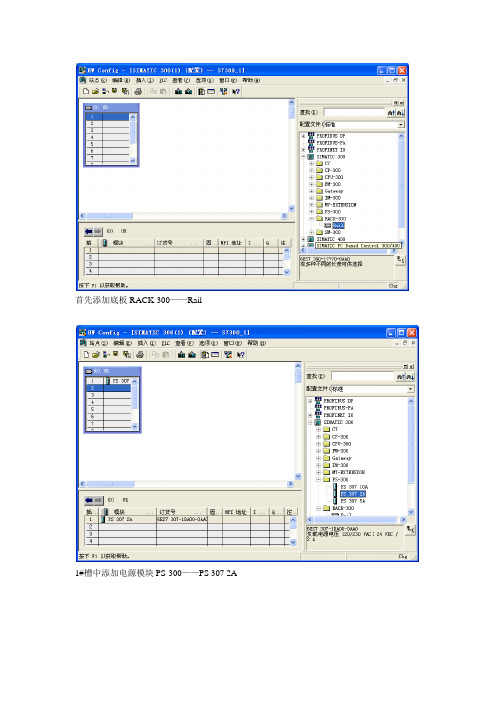
首先添加底板RACK-300——Rail1#槽中添加电源模块PS-300——PS 307 2A根据实训台上实际的CPU系列号添加cpu模块,在PROFIBUS 接口DP 对话框中“新建”一个新的子网,主站默认地址为2。
按“确定”完成。
CPU的I、Q address 默认从124开始,按照试题卷上CPU的输入输出地址要求进行更改。
添加CP 340 RS232串口通讯模块CP 340 RS232C,(系列号为1AH02),插入CP340后双击底板的4号槽位(cp340位置),跳出串口属性设置对话框单击“参数”按钮,出现参数设置对话框:将Protocal 3964(R)改为ACSII。
双击窗口中蓝色的Protocol方块,在Protocol对话框中,将Parit下拉框中的Even修改为None。
关闭对话框并保存更改。
单击OK结束设置。
5#槽中根据实际模块的系列号(1EX20固件版本号为V1.3选V1.1;或1EX21固件版本号为V1.0)添加以太网模块CP 343-1,“新建”一个新的以太网子网,设置IP地址:10.163.227.* 子网掩码:255.255.224.0,按OK完成。
其中*表示是电脑的IP地址加上10。
在挂从站之前,先在“选项”下选择菜单命令“安装GSD 文件”先后安装VIPA和MM440的GSD文件。
点击“浏览”找出GSD文件所在路径,选中存放GSD文件的最终文件夹后“确定”:选中窗口中*.gsd文件后单击“安装”,然后单击“是”完成MM440的GSD文件安装:再次单击“浏览”选中VIPA的GSD文件所在最终文件夹:选中*.gsd文件单击“安装“完成VIPA的GSD文件安装:添加ET 200M Profibus从站。
模块位置:PROFIBUS DP——ET 200M——IM153-1(系列号为1AA03),将153-1模块拖曳到Profibus DP总线上。
在窗口中设置从站站号Address=1,(必须与硬件设置的地址相一致)。
工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯工业机器人是现代制造业中的重要设备,主要用于自动化生产过程中的操作、装配、搬运和包装等环节。
而可编程控制器(PLC)是现代自动化控制系统的核心部件,通过它可以实现对设备和工艺的精细控制和管理。
在现代工业生产过程中,工业机器人和PLC通常需要进行通讯,以实现精细控制和交互信息。
下面将介绍工业机器人与西门子PLC的通讯方法和流程。
1、硬件连接:工业机器人和PLC之间通常采用以太网或串口连接方式进行通讯。
以太网通讯方式速度快,数据传输稳定,通讯距离远,支持多连接。
串口通讯方式连接简单,通讯速率较慢,但距离短。
2、通讯协议:根据不同的工业机器人和PLC品牌,需要对应相应的通讯协议进行通讯。
目前较为流行的协议有西门子S7通讯协议、Modbus协议、Profibus协议、Ethernet/IP协议等。
3、通讯方式:PLC与工业机器人之间的通讯方式通常包括主从方式和点对点方式。
主从方式是指PLC作为主机,在通讯过程中发起通讯请求,工业机器人作为从机,接受请求并返回数据。
这种通讯方式适用于对工业机器人进行指令控制和数据采集。
点对点方式是指PLC与工业机器人之间的通讯是平等的,两者可以相互发送数据和指令。
这种通讯方式更加灵活,数据传输速度快,在工业机器人任务调度和性能优化方面更加方便。
1、PLC与工业机器人连接需要先确定PLC和工业机器人之间的连接方式和通讯协议,设置好通讯参数和硬件连接。
一般需要根据具体情况进行调试和测试。
在主从式通讯模式下,PLC会向工业机器人发送读取数据请求,工业机器人在接受到请求后会将数据发送至PLC。
在点对点通讯模式下,PLC可以主动向工业机器人发送数据请求,也可以接收工业机器人发送的数据。
在每次数据收发后需要对数据进行处理和解析,以便PLC能够正确地控制工业机器人。
在点对点通讯模式下,PLC和工业机器人之间可以建立一个工作协议,在协议中规定指令的格式和执行方式。
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤

KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤本次内容来简单谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤。
步骤1:完成硬件接线
网线一端连接至控制柜门上的KLI端口,另一端连接到交换机,PLC也连接到交换机(交换机无型号要求),交换机再连接到电脑。
具体接线方式如下示意图:
步骤2:将编程电脑、PLC、KUKA设置成同一个网段(因KUKA的底层设置原因,最好不更改机器人IP地址)
(1)在博途软件中新建项目,并添加新设备,就是添加一个S7-1200型PLC
(2)点击选项—添加设备描述文件—导入KUKA机器人的GSD文件,这个GSD文件可以在KUKA机器人的示教器存储目录中找到,也可以私信找电气技术微课堂小编索要。
(3)安装GSD,并把KUKA设备进行组态
(4)设置好以上后(包括PLC地址),接下来就可以编译下载到PLC。
下载完成后PLC 会报红灯,是因为下一级组件存在故障,即还没有设置机器人端,连接不到下一级组件,所以报错。
也可以使用此方法判断是否连接成功。
步骤3:WorkVisual对KUKA进行设置
步骤4:激活、添加Profinet、DTM选择Profinet,详细设置过程如下图
步骤5:双击Profinet进行设置。
西门子300PLC连接组态王KingSCADA实现ModbusTCP通信
西门⼦300PLC连接组态王KingSCADA实现ModbusTCP通信西门⼦300PLC连接组态王KingSCADA实现ModbusTCP通信
西门⼦300系列PLC 本案例⽤PLC的是315-2DP,此型号PLC有两个通信接⼝分别是MPI、DP⼝。
⾸先把300PLC连接兴达易控PLC转以太⽹模块CHNet-S7300MD通过ModbusTCP或者是S7TCP 与上位机组态软件通信
1. 新建⼯程并打开⼯程,右击“IOServer 应⽤组”,选择“添加新 IOServer 应⽤组”。
2. 在弹出的对话框中,填⼊“应⽤名称”,点击“确定”。
3. 选择“设备”,在右边空⽩区域,点击⿏标右键,选择“新建”。
4. 在“设备名称”处输⼊⼀个名称,点击“下⼀步”。
5. “采集驱动”选择“S7_TCP”;“链路类型”选择“以太⽹”,点击“下⼀步”。
6. “链路逻辑名”默认即可,点击“下⼀步”。
7. “设备系列”选择“S7-300(TCP)”,“设备地址”的格式为:CHNet-S7MPI 的 IP 地址:0:2,这⾥CHNet-S7MPI 的 IP 地址为
192.168.1.188,点击“下⼀步”。
8. 其他参数默认,直⾄完成。
西门子 S7-300 以太网模块连接组态王方法

西门子S7-300与组态王进行以太网通讯的解决方案借助远创智控MPI转以太网模块
MPI-ETH-YC01以太网模块支持和市面上所有的SCADA 监控组态软件以太网通讯,例如:组态王、易控、WINCC、IFIX、MCGS、INTOUCH、力控、LABVIEW杰控等。
远创智控转以太网模块,型号MPI-ETH-YC01适用于西门子S7-200/S7-300/S7-400程序上下载、上位监控、设备联网和数据采集。
不占用PLC 编程口,即编程软件/上位机软件通过以太网对PLC数据监控和采集的同时,触摸屏可以通过扩展RS485口与PLC进行通讯。
西门子S7-300与组态王进行以太网通讯方法如下
用MPI-ETH-YC01模块插上西门子S7-300/400的9针口上,拓展出来的网口可以与组态王进行以太网通讯,可以采用:S7TCP驱动。
1、打开组态王工程浏览器——设备(COM1),双击右侧“新建”
2、选择西门子 S7-300 系列 TCP 驱动,点击【下一步】;
3、填入设备名称;
4、填入模块的 IP 地址:CPU 机架号:CPU 槽号(默认为 3);
5、完成参数设置。
工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯随着工业自动化技术的发展,工业机器人在生产线上扮演着越来越重要的角色。
而作为工业自动化系统的关键组成部分之一,可编程控制器(PLC)也在控制和监控工业机器人的运行中发挥着至关重要的作用。
工业机器人与PLC之间的通讯问题成为了自动化行业中的一个热点话题。
本文将就工业机器人与西门子PLC之间的通讯进行探讨,以及如何实现二者之间的高效稳定的通讯。
在工业自动化行业中,西门子PLC是一个非常知名的品牌,其在自动化控制领域有着非常丰富的经验和成熟的控制技术。
而工业机器人也有不同的品牌和型号,其中包括ABB、克番、发那科等。
这些工业机器人通常都具备各自的通讯接口和通讯协议。
要实现工业机器人与西门子PLC之间的通讯,需要采用合适的通讯方式和协议。
一般来说,西门子PLC与工业机器人之间的通讯方式主要有以下几种:1. 以太网通讯2. 串口通讯3. Profibus通讯4. Profinet通讯以太网通讯是目前较为流行的通讯方式之一,其具有高速、稳定的特点,可以满足工业机器人实时控制和数据传输的要求。
而串口通讯则是传统的通讯方式,虽然速度较慢,但其稳定性好,使用也较为方便。
而Profibus和Profinet是由西门子公司开发的两种通讯协议,可以实现不同品牌的设备之间的通讯。
对于工业机器人与西门子PLC之间的通讯,可以根据具体的实际情况选择合适的通讯方式和协议。
1. 选择合适的通讯方式和协议首先要根据具体的应用场景和设备要求,选择合适的通讯方式和协议。
对于有较高实时性和数据传输速度要求的应用场景,可以选择以太网通讯;而对于一些对实时性要求不太高但需要稳定性的控制场景,可以选择串口通讯。
要根据具体的设备来选择合适的通讯协议,以实现设备之间的兼容和互联。
2. 配置合适的通讯参数在实施工业机器人与PLC通讯时,需要正确配置通讯参数,包括设备的IP地址、端口号、通讯速率等。
这些参数的设置直接影响着通讯的稳定性和数据传输的可靠性,因此需要仔细调整和配置,确保通讯的正常运行。
西门子软PLC与组态软件如何通

西门子软PLC与组态软件如何通1. 使用OPC协议通信:OPC(Ole for Process Control,过程控制对象连接)是一种用于将数据从PLC传输到组态软件的开放标准协议。
西门子软PLC可以通过支持OPC协议的驱动程序与组态软件进行通信。
组态软件通过OPC客户端访问PLC上的数据,实现数据读取和写入功能。
2. 使用Modbus通信:Modbus是一种常用的开放通讯协议,支持串口和以太网等多种通信方式。
西门子软PLC可以通过添加Modbus通信模块或使用内置的Modbus功能与组态软件进行通信。
组态软件作为Modbus主站访问PLC上的数据,实现数据读取和写入功能。
3.使用TCP/IP通信:西门子软PLC和组态软件可以通过TCP/IP协议进行通信。
西门子软PLC作为服务器,组态软件作为客户端,通过TCP/IP网络连接进行数据交换。
组态软件可以通过读取和写入PLC的寄存器来获取和设置PLC上的数据。
4.使用数据库通信:西门子软PLC可以通过支持数据库连接的驱动程序与组态软件进行通信。
PLC通过将数据写入数据库或从数据库读取数据,实现与组态软件之间的数据交换。
组态软件可以通过访问数据库来获取PLC的数据。
需要注意的是,通信方式的选择应根据具体需求和硬件条件来决定。
比如,如果PLC和组态软件在同一台计算机上运行,可以选择使用本地通信方式(如OPC或TCP/IP);如果PLC和组态软件在不同的地理位置,可以选择使用Internet通信方式(如Modbus或TCP/IP)。
此外,需要确保PLC和组态软件之间的通信参数设置正确,例如PLC的IP地址、端口号、协议类型等。
同时,也需确保PLC程序正确编写,提供正确的数据格式和访问权限,以便组态软件能够正确地读取和写入数据。
总的来说,西门子软PLC与组态软件的通信可以通过OPC、Modbus、TCP/IP和数据库等方式实现,具体选择取决于实际应用需求和硬件条件。
西门子S7300、S7400plc和组态王通讯常用的几种方式
西门子S7300、S7400PLC和组态王通讯常用的几种方式说明文档北京亚控科技发展有限公司2009年7月目录1. MPI电缆通讯方式 (1)2. MPI通讯卡方式 (1)3. 以太网通讯方式 (1)4. Profibus –DP通过方式 (2)5. Profibus –S7通过方式 (3)1. MPI电缆通讯方式硬件连接:此种方式使用s7300、s7400 PLC上的MPI编程口,使用西门子标准编程电缆链接到计算机串口上;适用场合:一般适用于一个PLC和一台PC进行直接串口通讯的场合,PLC和PC 机之间距离较近,小于15米;组态王对应驱动:在组态王中对应的设备定义向导为:PLCÆ西门子ÆS7-300系列ÆMPI(电缆) 或者PLCÆ西门子ÆS7-400系列ÆMPI(电缆) 。
特殊软件需求:组态王所在的计算机必须安装STEP7编程软件。
需要Set PG/PC Interface 的支持,具体配置按照组态王对应驱动帮助执行即可。
2. MPI通讯卡方式硬件连接:此种方式使用PLC上的MPI编程口,计算机上插一块西门子公司的CP5611(或CP5613等MPI通讯卡――具体根据带PLC类型和数量,由西门子公司确定使用何种通讯卡),通讯卡和PLC之间一般使用西门子提供的标准转换接头和通讯电缆实现硬件连接;适用场合:一般适用于一台PC和多个PLC进行通讯的场合;或者多台PLC和多台PC进行链接(MPI为多点接口协议,支持多个上位PC进行MPI通讯,具体能够支持的最多上位PC数量建议和西门子公司具体确定。
), PLC和PC机之间距离较远,大于15米;组态王对应驱动:在组态王中对应的设备定义向导为:PLCÆ西门子ÆS7-300系列ÆS7-300MPI(通讯卡) 或者PLCÆ西门子ÆS7-400系列Æ S7-400MPI(通讯卡) 。
工业机器人与可编程控制器(西门子PLC)的通讯
工业机器人与可编程控制器(西门子PLC)的通讯工业机器人和可编程控制器(PLC)在现代制造业中发挥着重要作用,它们之间的通讯是保证生产线顺利运行的关键环节。
本文将重点探讨工业机器人与西门子PLC之间的通讯技术。
工业机器人是一种能够自动完成各种生产任务的机械设备,它可以代替人工进行重复性、精细度高的作业,提高生产效率并降低人力成本。
而PLC是一种专门用于工业自动化控制的可编程控制器,它可以根据预先编写的程序对生产设备进行精确的控制和调度。
在现代制造业中,工业机器人通常需要与多台设备进行联动操作,其中包括PLC控制的设备。
为了实现机器人与PLC之间的通讯,通常采用以下几种方式:1. 以太网通讯:以太网是一种高速、可靠的通讯协议,它可以实现机器人与PLC之间的实时数据传输。
通常采用TCP/IP协议进行通讯,在网络配置方面也比较灵活,可以根据具体的生产环境进行定制。
2. 串行通讯:串行通讯是一种较为传统的通讯方式,通常采用RS-232、RS-485或者RS-422等协议进行通讯。
虽然速度不如以太网快,但在一些特殊的生产场景下,串行通讯仍然是一种可行的选择。
3. 专用通讯协议:有些机器人厂商和PLC厂商会提供专门的通讯模块或协议,通过这些专用的通讯方式可以实现机器人与PLC之间的高效通讯。
这种方式通常需要根据厂商提供的文档进行相应的配置和编程。
在实际的工程应用中,为了实现工业机器人与PLC之间的通讯,需要有一套完善的通讯协议和通讯接口。
西门子作为世界知名的工业自动化厂商,其PLC产品在全球范围内得到了广泛应用。
以下将重点介绍工业机器人与西门子PLC之间的通讯技术。
1. 以太网通讯:当工业机器人与西门子PLC之间采用以太网进行通讯时,通常需要在PLC端配置相应的通讯模块,同时在机器人的控制系统中也需要进行相应的网络配置。
在西门子的PLC产品中,常用的以太网通讯模块包括CP343-1 Lean、CP443-1等,这些模块可以实现与机器人之间的稳定、高速的数据通讯。
PLC现场硬件组态和软件调试步骤

PLC现场硬件组态和软件调试步骤系统的规划首先,必须深入了解系统所需求的功能,并调查可能的控制方法,同时与用户或设计院共同探讨最正确之操作程序,根据所归纳之结论来拟定系统规划,决定所采行的plc系统架构、所需之I/O点数与I/O模块型式。
I/O模块选择与地址设定当I/O模块选妥后,依据所规划之I/O点使用情形,由PLC的CPU系统自动设定I/O地址,或由使用者自定I/O 模块的地址。
梯形图程序的编写与系统配线在确定好实际的I/O地址之后,依据系统需求的功能,开始着手梯形图程序的编写。
同时,I/O之地址已设定妥当,故系统之配线亦可着手开展。
梯形图程序的仿真与修改在梯形图程序撰写完成后,将程序写入PLC,便可先行在PC与OpenPLC系统做在线连接,以执行在线仿真作业。
倘若程序执行功能有误,则必须开展除错,并修改梯形图程序。
系统试车与实际运转在线上程序仿真作业下,若梯形图程序执行功能正确无误,且系统配线亦完成后,便可使系统纳入实际运转,项目计划亦告完成。
程序注释和归档为确保日后维修的便利,要将试车无误可供实际运转的梯形图程序做批注,并加以整理归档,方能缩短日后维修与查阅程序之时间。
这是职业工程师的良好习惯,无论对今后自己开展维护,或者移交用户,这都会带来极大的便利,而且是你的职业水准的一个表达。
这里要强调一个问题,是十分简单但却几乎每个项目都会发生的,那就是对PLC的接线。
这往往是经验缺陷的工程师常常忽略的一个问题。
其实,现场调试大部分的问题和工作量都是在接线方面。
有经验的工程师首先应当检查现场的接线。
通常,如果现场接线是由用户或者其它的施工人员完成的,则通过看其接线图和接线的外观,就可以对接线的质量有个大致的判断。
然后要对所有的接线开展一次完整而认真的检查。
现场由于接线错误而导致PLC被烧坏的情况屡次发生,在开展真正的调试之前,一定要认真地检查。
即便接线不是你的工作,检查接线也是你的义务和责任,而且,可以省去你后面大量的时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
从右边的配置文件中找到安装的 EL6731模块,按着左键不放,将 鼠标移动到箭头所示,此时鼠标 下方有个“+”即可松开,就出 现属性对话框了,地址的选择没 有2,是因为不能和主站的DP地 址重复。
添加完模块后,根据实际所能用 到的最大数据长度,来配置 EL6731下的输入输出,这里选择 10个字的长度,注意这边第一 插槽是从出主进,第二插槽是从 进主出,要和WrokVisual中配置 的相同,否则将无法传输数据。
点击“文件”, 选择“新建向导”
选取对应的CPU型 号
设置项目名称, 只能是英文字母 和数字组合
点击“SIMATIC 300 站点”,出现右边的 “硬件和CPU”,再双击“硬件”
硬件配置的界面,CPU是新建项目 时自动生成的,接下来是配置DP主 站系统和I/O模块
实际使用中,采用BACKOFF的 EL6731模块作为DP通讯的载体, 西门子自带的配置文件中是没 有,此时需要到BACKOFF官网 上自行下载该模块的GSD配置 文件。
上图中插槽的I/Q地址是从256~275 个字,需要设置过程映像区的大 小,否则无法传输数据。
有了GSD文件后,点击“选项”下的 “安装GSD文件”
配置文件有两种语言,英语和德语, 为了使用方便,一般选择“英语”。
下面开始配置I/O模块,根据所需要的模块, 按订货号查找,按照实际模块的配置顺序, 一一配置好。配置好后的状态如下。
右击“DP”,“添加主站系统”
地址可以默认,但 要注意不能和从站 的地址重复。选择 “新建”,选择传 输率为1.5Mbps的 DP网络。