PID技术在变频控制系统中的应用
模糊PID算法在空调控制系统中的应用

模糊PID算法在空调控制系统中的应用【摘要】空调控制系统是一种非线性设备,系统控制复杂,并且由于其干扰严重,参数耦合性强及时变性等特点,使得变频控制系统控制尤为复杂。
对于这样一个非线性的温度控制系统,简单的PID算法无法对其进行控制到非常好的效果。
将PID算法和模糊控制算法相结合形成模糊PID控制算法,该算法集成了PID算法和模糊控制算法的优势,包括比例、模糊、比例积分控制等。
使用模糊PID控制算法的空调控制系统具有更快的反应速度和更强的鲁棒性,更高的精度和稳态。
仿真实验证明,模糊PID控制能有效降低系统误差,保证系统具有良好的特性,达到变频空调的理想控制效果。
【关键词】PID 模糊控制变频空调引言随着科学技术的进步和计算机控制系统发展,通信数据中心机房也得到了大力的发展。
具统计,在典型的通信数据中心机房投资时,空调制冷设备占投资的6%,但是其空调设备在后期的电费支出却占整个机房的电费支出的40%以上,因此大型机房的空调设备节能问题是目前一个继续解决的重点难题。
空调系统设备不仅要保证工作人员的一个舒适的理想工作环境,更要创造一个各种设备能稳定运行的环境,由于信息化专用机房内各种程控交换机及电子计算机属于高精度设备,对工作环境有着特殊的要求,对机房环境的湿度、温度、净化空调送风方式都有很高的要求,这就对机房的空调控制系统提出了高要求。
空调系统设备属于非线性设备,具有滞后性、参数时变性和受环境影响大的特点,目前市场上大多数空调设备都是采用的控制方法都比较单一,很难对性能进行大幅度的提升。
但是采用模糊PID控制,可以实现优越的控制性能,主要是因为模糊PID控制根据空调的数学模型和实际测量结果对目标进行控制,非常适用于无法建立精确模型和模型变化的情况。
1 模型建立空调房是一个多变的目标体,比较复杂,实际的空调房的动态特征是一个高阶微分方程[2],由于高阶微分方程计算非常复杂,不便于模型的建立,因此本文采用响应曲线的方法对空调房的室内温度的特性进行分析。
基于PLC的PID控制变频恒压供水系统
基于PLC的PID控制变频恒压供水系统摘要基于PLC的PID控制的变频恒压控制是现代供水控制系统的主要方式,利用PLC(可编程控制器)、PID调节器、压力检测传感器、压力变送器、电气控制设备、变频器及水泵机组组成闭环控制系统,使供水管网压力保持恒定。
关键词PLC;PID控制;变频器;闭环控制在实际生产生活中,用户用水的多少是经常变动的,因此供水不足或供水过剩的情况时有发生。
而用水和供水之间的不平衡集中反映在供水的压力上,即用水多而供水少,则压力低;用水少而供水多,则压力过大。
因此,保持供水压力的恒定,可使供水和用水之间保持平衡,即用水多时供水也多,用水少时供水也少,从而提高了供水的质量。
恒压供水是指在供水网中用水量变化时,出水口压力保持恒定不变的供水方式。
1恒压供水的基本原理1.1变频恒压供水系统的组成及原理变频恒压供水系统压力控制主要有PID调节器、变频器、水泵、压力传感器和变送器、PLC可编程控制器等组成。
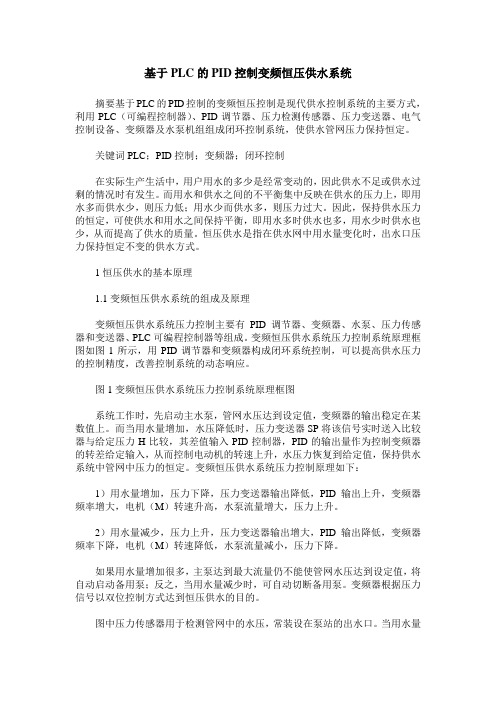
变频恒压供水系统压力控制系统原理框图如图1所示,用PID调节器和变频器构成闭环系统控制,可以提高供水压力的控制精度,改善控制系统的动态响应。
图1变频恒压供水系统压力控制系统原理框图系统工作时,先启动主水泵,管网水压达到设定值,变频器的输出稳定在某数值上。
而当用水量增加,水压降低时,压力变送器SP将该信号实时送入比较器与给定压力H比较,其差值输入PID控制器,PID的输出量作为控制变频器的转差给定输入,从而控制电动机的转速上升,水压力恢复到给定值,保持供水系统中管网中压力的恒定。
变频恒压供水系统压力控制原理如下:1)用水量增加,压力下降,压力变送器输出降低,PID输出上升,变频器频率增大,电机(M)转速升高,水泵流量增大,压力上升。
2)用水量减少,压力上升,压力变送器输出增大,PID输出降低,变频器频率下降,电机(M)转速降低,水泵流量减小,压力下降。
如果用水量增加很多,主泵达到最大流量仍不能使管网水压达到设定值,将自动启动备用泵;反之,当用水量减少时,可自动切断备用泵。
PID技术在变频控制系统中的应用
PID技术在变频控制系统中的应用发表时间:2018-11-02T22:28:50.247Z 来源:《电力设备》2018年第17期作者:邓凯[导读] 摘要:目前我国随着城市规模发展,居民生活用水,工业生产用水量逐步增大,城镇自来水厂及污水处理厂的建设占市政建设的比重也越来越大。
(武汉市排水发展有限公司黄家湖污水处理厂湖北省武汉市)摘要:目前我国随着城市规模发展,居民生活用水,工业生产用水量逐步增大,城镇自来水厂及污水处理厂的建设占市政建设的比重也越来越大。
在污水处理厂中,由于每座污水处理厂都有收集污水的泵站,而提升泵又是收集污水的主要工艺设备,其耗电量占厂内总耗电量很大的比重,所以提升泵运控制过程好坏对于污水设备管理有着重要的意义。
目前我国大多数污水处理厂对于提升泵的运行管理还是采用的是人工调频,及定频后通过高液位关、低液位开的自动控制方式。
这两重方式很大成度上都存在这各自的不足。
为了解决这个问题我们采用PID控制方式,PID(比例积分微分)英文全称为Proportion Integration Differentiation,它是一个数学物理术语。
目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器、传感器、变送器、执行机构、输入输出接口。
控制器的输出经过输出接口、执行机构,加到被控系统上;控制系统的被控量,经过传感器,变送器,通过输入接口送到控制器。
不同的控制系统,其传感器、变送器、执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的能实现PID控制功能的可编程控制器(PLC)。
可编程控制器(PLC) 是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与ControlNet相连,如Rockwell的PLC-5等。
运用PID与变频器实现恒压供水控制方案

运用PID与变频器实现恒压供水控制方案2008-01-20 19:58一:PID概念1. PID解释:即由比例(Proportion)+积分(Integral)+微分(Differential coefficient)组合而成。
2. 比例P控制:调节量按误差成比例输出,纯比例时误差不会为零。
即一对一的对应关系。
3. 积分I控制:调节量按误差的积分输出,误差为零时,输出恒定。
既有一定的延迟。
4. 微分D控制:调节量按误差的微分输出,误差突变时,能及时控制。
既快速反应。
5. PI控制动作:所谓PI控制就是将比例控制P和积分控制I结合起来,根据偏差及时间变化,产生一个操作变量。
二:运用PI控制系统方框图运用于PID可实现压力负反馈单闭环控制。
控制理论与算法。
1. PID配合变频器与压力传感器实现单泵闭环恒压供水控制系统。
2. 通常压力传感器分电流型与电压型两种。
PID有内置变频器与单独的外置两种。
三:设定任何一个控制系统都需要经过反复地调试后方可达到最佳性能,没有调试的系统是不能工作或不能良好地运行。
下面举例AMB-G7系列单泵恒压供水调试方法。
A. 首先必须知道控制对象的参数。
对象特征、需要的最大供水压力、需要给定用户的恒定压力、供水最小压力、上限压力、下限压力等。
B. 假设对一小区进行恒压供水改造,其要求管道最大供水压力为(A)11Kpa ,对应传感器输出电流为20mA , 要求最小供水压力为(B)1Kpa,对应输出的电流为4mA , 用户要求恒定的供水压力为(C)5Kpa 。
根据以上三个参数可以确定PID的设定值,既:(必须保证在最大供水压力时对应于压力传感器电流输出最大,反之亦然,可求出用户要求供水压力时的传感器电流)C. 传感器给定电流(Iset)正比于用户所需的恒定供水压力。
(假设压力传感器输出电流为4~20mA)既:Iset/(Imax-Imin)=C/(A-B)→Iset/(20mA-4mA)=5/(11-1)→Iset/16=5/10→Iset=16*0.5=8mA(5 0%电流)其中Imax=最大电流 Imin=最小电流 Iset=需要给定的电流值D. 而G7系列F84设定电压也正比与设定电流。
PID控制技术在鼓风机变频调速系统中的应用
PID控制技术在鼓风机变频调速系统中的应用
PID控制技术是一种常用的控制算法,也是鼓风机变频调速系统中最常用的控制算法之一。
PID控制技术通过测量系统输出值与期望值之间的偏差,并根据该偏差调整控制器输出,从而使系统输出值逼近期望值。
鼓风机变频调速系统是通过改变鼓风机的转速来控制气体流量和风压的系统。
在这个系统中,PID控制器的输入为系统输出值与期望值之间的偏差,输出为调整后的转速命令信号,用于控制变频器的频率。
在鼓风机变频调速系统中,PID控制器通常分为三个部分:比例(Proportional)、积分(Integral)和微分(Derivative)。
首先是比例部分,比例控制器根据系统输出值与期望值之间的偏差进行比例放大,并输出相应的控制信号。
比例控制器的作用是根据偏差的大小,快速响应系统的变化。
过小的比例增益会导致系统的响应速度较慢,而过大的比例增益会引起系统的震荡。
PID控制器通过综合比例、积分和微分部分的控制信号,实现系统输出值与期望值之间的精确控制。
在鼓风机变频调速系统中,PID控制技术可以调整鼓风机的转速,从而实现对气体流量和风压的精确控制。
根据实际需求,可以通过调整PID控制器的参数来优化系统的性能,如提高响应速度、减小稳态误差等。
一种基于变频器PID功能的PLC控制恒压供水系统

PID PLC1.前言恒压供水系统是目前市场上运用最为广泛的供水系统之一。
变频器PID 控制系统是整个恒压供水系统的控制核心。
通过PLC (可编程逻辑控制器)对整个系统进行可靠的控制,不仅提高了水压的稳定性,同时也提高了系统运行效率,降低了能源消耗。
2. 恒压供水系统概述恒压供水系统是指在不同供水流率和负荷状态下,系统所维持的压力都是恒定的。
相比较其他常见的供水系统,恒压供水系统可以满足一些特殊的供水需求,比如公寓、办公楼、酒店、医院等高层建筑物的供水。
恒压供水系统一般可以分为两类:一类是调速泵房恒压供水系统,另一类是变频器恒压供水系统。
调速泵房恒压供水系统采用调速泵进行水压控制,系统通过加减泵数来维持恒定的工作水压。
这种方式适合较小规模的恒压供水系统。
变频器恒压供水系统则采用变频器控制泵的转速,通过控制水泵的转速来保持一定的供水压力。
对于大规模的高楼、大型公共建筑物等供水系统,采用变频器恒压供水系统更为常见。
3. 变频器PID 功能PID 控制是一种最广泛应用的控制方法之一,在变频器控制系统中,同样可以采用PID 控制算法来控制水泵的输出,实现恒压供水系统的控制。
PID 控制器的核心算法为比例(P)、积分(I)和微分(D)三部分,分别调节系统的稳定性、抗干扰性和响应速度。
在恒压供水系统中,通过调整PID 控制器的参数,可以实现快速反馈,实时调整水泵的输出,保持系统稳定性。
4. PLC 控制恒压供水系统PLC 是一种专门用于工业自动化的可编程电子控制器。
PLC 芯片可以通过编程实现对数字信号的处理、控制逻辑、数据存储和通信等功能。
在恒压供水系统中,PLC 的主要任务是控制变频器PID 控制器的输入和输出,采集水泵和供水系统的运行数据。
PLC 控制系统的核心模块为CPU (核心处理单元)和I/O 模块(输入输出模块)。
对于PLC 恒压供水系统的实现,可以通过编写PLC 程序来实现PID 控制器的参数调整、水泵的开关控制、水压监测和数据传输等任务。
基于一个PID控制两台变频器的方法及应用

第41卷第5期2019年10月甘㊀肃㊀冶㊀金GANSU㊀METALLURGYVol.41No.5Oct.ꎬ2019文章编号:1672 ̄4461(2019)05 ̄0103 ̄04基于一个PID控制两台变频器的方法及应用陈兰芳ꎬ柴㊀山ꎬ王义顺(酒钢(集团)宏兴钢铁股份有限责任公司ꎬ甘肃㊀嘉峪关㊀735100)摘㊀要:介绍了一个PID控制两台变频器的方法及应用ꎬ该方法用一个PID控制1336PLUS 和Powerflex700系列变频器ꎬ实现远程对变频器的监控功能ꎬ通过该方法的实施ꎬ对不同型号变频器的控制提供了一种方法ꎬ此方法对变频器升级改造有推广意义ꎮ关键字:PIDꎻ1336PLUS 和Powerflex700系列变频器ꎻ监控功能中图分类号:TP273.5㊀㊀㊀㊀㊀文献标识码:BMethodandApplicationofControllingTwoFrequencyConvertersBasedonOnePIDCHENLan ̄fangꎬCHAIShanꎬWANGYi ̄shun(Jiugang(Group)HongxingIronandSteelCo.Ltd.ꎬJiayuguan735100ꎬChina)Abstract:Thispaperintroducesthemethodandapplicationoftwoinverterscontrolledbypid.Themethodusesapidtocontrol1336plusandpowerflex700seriesinverterstorealizethefunctionoflong ̄distancemonitoringandcontrolofthein ̄vertersꎬandthroughtheimplementationofthismethodꎬthispaperprovidesamethodforthecontrolofdifferenttypesofin ̄vertersꎬandthismethodisofgreatsignificancetotheupgradingoftheinverter.KeyWords:PIDꎻ1336PLUSandPowerflex700seriesinverterꎻmonitoringfunction1㊀工艺和控制系统设备简介2003年选矿综合自动化项目对一段球磨给矿电振采用变频控制ꎬ变频器采用DeviceNet(设备网)控制ꎬ见图1ꎮDeviceNet(设备网)控制精度高㊁节能㊁稳定ꎬ在选矿广泛应用ꎮ选矿一段球磨给矿电振有四台弹联振动给料机组成ꎬ1#(1和3为一组)㊁2#(2和4为一组)采用斜对角给料ꎬ每组给矿电振用一台变频器控制两台弹联振动给料机ꎬ在电气回路中对两组给矿电振变频器进行互锁ꎮ原设计采用ControlLogix5000控制系统ꎬ系统包括机架电源㊁处理器㊁通讯模块1756-DNB㊁AI/AO模板及DI/DO模板ꎮ用1个PID控制1#和2#给矿电振频率给定ꎮ目前ꎬ1336PLUS 变频器属于落后产品ꎬ部分已被用PowerFlex700变频器替代ꎮ为了降低成本和故障率ꎬ1#给矿电振采用1336PLUS 变频器[1]ꎬ2#给矿电振采用PowerFlex700变频器[2]ꎮ用1个PID控制1#和2#给矿电振时ꎬ2#电振的PowerFlex700变频器出现频率给定超限ꎬ造成变频器故障[3]㊁2#给矿电振停机ꎬ球磨给矿出现断料现象ꎬ致使球磨机衬板砸坏ꎬ造成球磨机停机而影响生产ꎮ图1㊀DviceNet网络图㊀㊀为了满足球磨给矿稳定㊁均匀ꎬ既不影响生产又能顺利完成变频器升级改造工作ꎬ对PID控制采用智能自动控制ꎬ准确控制变频器频率达到球磨给矿稳定㊁均匀的目的ꎬ用一个PID控制两台变频器的方法及应用ꎮ2㊀技术措施要确保一段球磨给矿稳定㊁均匀用一个PID控制两台不同型号变频器的方法ꎻ通过解决上述现象ꎬ在不影响生产㊁完成变频器升级改造ꎬ包括以下步骤:⑴对1#给矿电振1336PLUS 变频器ꎬ2#给矿电振PowerFlex700变频器ꎬ使用RSNetWroxforDe ̄viceNet组态软件对通讯模块1756-DNB进行参数配置[4]ꎮ⑵1#给矿电振1336PLUS 变频器3输入字Local:2:I.Data[0]~Local:2:I.Data[3]㊁输出字Lo ̄cal:2:O.Data[0]~Local:2:O.Data[3]保持不变ꎮ⑶2#给矿电振1336PLUS 变频器输入字Lo ̄cal:2:I.Data[4]~Local:2:I.Data[7]改变成Power ̄Flex700变频器4输入字Local:2:I.Data[4]~Local:2:I.Data[6]ꎻ2#给矿电振1336PLUS 变频器输出字Local:2:O.Data[4]~Local:2:O.Data[7]改变成PowerFlex700变频器4输出字Local:2:O.Data[4]~Local:2:O.Data[6]ꎮ⑷1#给矿电振1336PLUS 变频器3控制变量最大值32767ꎬ1Hz对应单位值655ꎬ最小频率10Hz对应最小值6550ꎻ2#给矿电振PowerFlex700变频器4控制变量最大值27306ꎬ1Hz对应单位值546ꎬ最小频率10Hz对应最小值5460ꎮ⑸PID指令PIDGK8ꎻ过程变量(反馈值)WT_RC8ꎻ控制变量PLGD8ꎻinhold值(设定值)WT_801aꎻ手动频率设置GK8_HZꎻPID手自动转换PIDGK8.SWMꎻ设置输出PIDGK8.SOꎻ最大控制变量值PIDGK8.MAXCVꎻ单位频率值XL8JD1ꎮ⑹1336PLUS 变频器3㊁PowerFlex700变频器4智能自动控制过程(图2)ꎮ1336PLUS 变频器3在使能㊁自动㊁互锁及非故障状态下ꎬ启动1336PLUS 变频器3ꎬ将最大值32767赋值到最大控制变量值PIDGK8.MAXCVꎬ单位值655赋值到单位频率值XL8JD1ꎮPID指令PIDGK8在手动状态时ꎬ手动频率设置GK8_HZˑ2ꎬ运算结果赋值到设置输出PIDGK8.SO(手动㊁自动转换平滑过渡)㊁手动频率设置GK8_HZˑ单位频率值XL8JD1ꎬ运算结果赋值到控制变量PLGD8ꎬ执行PID指令手动调节ꎻPID指令PIDGK8在自动状态时ꎬinhold值(设定值)WT_801a与过程变量(反馈值)WT_RC8比较执行PID指令形成闭环控制ꎬ运算结果由控制变量PLGD8输出ꎻ所述1336PLUS 变频器3运行ꎬ控制变量PLGD8小于最小值6550时ꎬ将最小值6550赋值Local:2:O.Data[1]ꎻ控制变量PLGD8大于最大值32767时ꎬ将最大值32767赋值Local:2:O.Data[1]ꎻ控制变量PLGD8不满足上述条件时ꎬ将控制变量PLGD8赋值Local:2:O.Data[1]ꎮPowerFlex700变频器4在使能㊁自动㊁互锁及非故障状态下ꎬ启动PowerFlex700变频器4ꎬ将最大值27306赋值到最大控制变量值PIDGK8.MAXCVꎬ单位值546赋值到单位频率值XL8JD1ꎮ在PID指令PIDGK8手动状态时ꎬ手动频率设置GK8_HZˑ2ꎬ运算结果赋值到设置输出PIDGK8.SO(手动㊁自动转换平滑过渡)㊁手动频率设置GK8_HZˑ单位频率值XL8JD1ꎬ运算结果赋值到控制变量PLGD8ꎬ执行PID指令手动调节ꎻPID指令PIDGK8在自动状态时ꎬinhold值(设定值)WT_801a与过程变量(反馈值)WT_RC8比较执行PID指令形成闭环控制ꎬ运算结果由控制变量PLGD8输出ꎻPowerFlex700变频器4运行ꎬ控制变量PLGD8小于最小值5460时ꎬ将最小值5460赋值Local:2:O.Data[4]高16位ꎻ控制变量PLGD8大于最大值27306时ꎬ将最大值27306赋值Local:2:O.Data[4]高16位ꎻ控制变量PLGD8不满足上述条件时ꎬ将控制变量PLGD8赋值Local:2:O.Data[4]高16位ꎮ该方法主要对原控制策略进行优化ꎬ将固定参数控制改变成智能参数自动控制ꎬ通过智能参数自动控制选择最大控制变量值PIDGK8.MAXCVꎬ此方法适用于不同型号的变频器ꎮ3㊀项目实施步骤用一个PID控制两台不同型号变频器的方法ꎬ包括以下步骤ꎮ⑴在ControlLogix5000控制系统1中ꎬ增加处理器模块㊁设备网通讯模块ꎬ用DeviceNet网络2将ControlLogix5000控制系统1㊁1336PLUS 变频器3㊁PowerFlex700变频器4连接[4](图1)ꎬ使用RSNetWroxforDeviceNet组态软件对通讯模块1756-DNB进行参数配置(表1㊁表2)ꎮ⑵1#给矿电振1336PLUS 变频器3参数控制变量最大值32767ꎬ1Hz对应单位值655ꎬ最小频率10Hz对应最小值6550ꎻ2#给矿电振PowerFlex700变频器4参数控制变量最大值27306ꎬ1Hz对应单位值546ꎬ最小频率10Hz对应最小值5460ꎮ401㊀㊀㊀㊀㊀㊀㊀㊀㊀甘㊀肃㊀冶㊀金㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第41卷图2 一个PID控制两台不同型号变频器流程图㊀㊀⑶PID指令PIDGK8ꎻ过程变量(反馈值)WT_RC8ꎻ控制变量PLGD8ꎻinhold值(设定值)WT_801aꎻ手动频率设置GK8_HZꎻPID手自动转换PIDGK8.SWMꎻ设置输出PIDGK8.SOꎻ最大控制变量值PIDGK8.MAXCVꎻ单位频率值XL8JD1ꎮ⑷1336PLUS 变频器3㊁PowerFlex700变频器4智能自动控制过程(图2)ꎮ①1336PLUS 变频器3上电㊁使能Local:2:I.Data[0].0置1㊁自动Local:2:I.Data[2].0置1㊁互锁PowerFlex700变频器4Local:2:I.Data[4].1置0㊁故障Local:2:I.Data[0].7置0状态下ꎬ启动1336PLUS 变频器3将Local:2:I.Data[0].1置1ꎬ将最大值32767赋值到最大控制变量值PIDGK8.MAX ̄CVꎬ单位值655赋值到单位频率值XL8JD1ꎮ②PID指令PIDGK8在手动状态下ꎬPID手自动转换PIDGK8.SWM置1时ꎬ手动频率设置GK8_HZˑ2ꎬ运算结果赋值到设置输出PIDGK8.SO(手动㊁自动转换平滑过渡)㊁手动频率设置GK8_HZˑ单位频率值XL8JD1ꎬ运算结果赋值到控制变量PL ̄GD8ꎬ执行PID指令手动调节ꎻPID指令PIDGK8在自动状态下ꎬPID手自动转换PIDGK8.SWM置0时ꎬinhold值(设定值)WT_801a与过程变量(反馈501第5期㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀陈兰芳ꎬ等:基于一个PID控制两台变频器的方法及应用㊀㊀㊀㊀㊀㊀值)WT_RC8比较执行PID指令形成闭环控制ꎬ运算结果由控制变量PLGD8输出ꎮ表1㊀1336PLUS 变频器3㊁PowerFlex700变频器4应用字功能介绍名称输入字功能输出字功能1336PLUS 变频器3Local:2:I.Data[0]低16位逻辑状态字反馈高16位速度反馈Local:2:O.Data[0]命令字Local:2:I.Data[1]低16位电流反馈高16位功率反馈Local:2:O.Data[1]频率给定Local:2:I.Data[2]低16位变频器状态反馈高16位变频器故障反馈Local:2:O.Data[2]Local:2:I.Data[3]Local:2:O.Data[3]PowerFlex700变频器4Local:2:I.Data[4]低16位逻辑状态字反馈高16位速度反馈Local:2:O.Data[4]低16位命令字高16位频率给定Local:2:I.Data[5]电流反馈Local:2:O.Data[5]Local:2:I.Data[6]功率反馈Local:2:O.Data[6]表2㊀1336PLUS 变频器3㊁PowerFlex700变频器4逻辑状态字及命令字名称变频器使能变频器自动变频器故障变频器运行变频器停止变频器启动1336PLUS 变频器3Local:2:I.Data[0].0Local:2:I.Data[2].0Local:2:I.Data[0].7Local:2:I.Data[0].1Local:2:O.Data[0].0Local:2:O.Data[0].1PowerFlex700变频器4Local:2:I.Data[4].0Local:2:I.Data[4].12Local:2:I.Data[4].7Local:2:I.Data[4].1Local:2:O.Data[4].0Local:2:O.Data[4].1㊀㊀③1336PLUS 变频器3运行Local:2:I.Data[0].1置1ꎬ控制变量PLGD8小于最小值6550时ꎬ将最小值6550赋值到Local:2:O.Data[1]ꎻ控制变量PLGD8大于最大值32767时ꎬ将最大值32767赋值到Local:2:O.Data[1]ꎻ控制变量PLGD8不满足上述条件时ꎬ将控制变量PLGD8赋值到Local:2:O.Data[1]ꎮ④PowerFlex700变频器4上电㊁使能Local:2:I.Data[4].0置1㊁自动Local:2:I.Data[4].12置1㊁互锁1336PLUS 变频器3Local:2:I.Data[0].1置0㊁故障Local:2:I.Data[4].7置0状态下ꎬ启动Power ̄Flex700变频器4ꎬ将最大值27306赋值到最大控制变量值PIDGK8.MAXCVꎬ单位值546赋值到单位频率值XL8JD1ꎮ在PID指令PIDGK8手动状态下ꎬPID手自动转换PIDGK8.SWM置1时ꎬ手动频率设置GK8_HZˑ2ꎬ运算结果赋值到设置输出PIDGK8.SO(手动㊁自动转换平滑过渡)㊁手动频率设置GK8_HZˑ单位频率值XL8JD1ꎬ运算结果赋值到控制变量PLGD8ꎬ执行PID指令手动调节ꎻ所述PID指令PIDGK8在自动状态下ꎬPID手自动转换PIDGK8.SWM置0时ꎬinhold值(设定值)WT_801a与过程变量(反馈值)WT_RC8比较执行PID指令形成闭环控制ꎬ运算结果由控制变量PLGD8输出ꎻPower ̄Flex700变频器4运行Local:2:I.Data[4].1置1ꎬ控制变量PLGD8小于最小值5460时ꎬ将最小值5460赋值到Local:2:O.Data[4]高16位ꎻ控制变量PLGD8大于最大值27306时ꎬ将最大值27306赋值到Local:2:O.Data[4]高16位ꎻ控制变量PLGD8不满足上述条件时ꎬ将控制变量PLGD8赋值到Lo ̄cal:2:O.Data[4]高16位ꎮ4㊀推广应用⑴变频器升级改造后智能自动控制保持原控制方式ꎬ降低操作风险ꎮ⑵采用智能自动控制将复杂控制简单化ꎬ利于项目的改造㊁降低检修成本ꎮ⑶通过此项目改造成功应用ꎬ可以推广到Com ̄pactlogix控制系统和ABPowerFlex755变频器中应用[5]ꎮ参考文献:[1]㊀1336PLUSꎬAdjustableFrequencyACDrive[M].UserManual.[2]㊀Powerflex700高性能交流变频器Phase[M].控制用户手册.[3]㊀柴㊀山ꎬ陈兰芳ꎬ曹怡梅.基于控制系统的变频器故障诊断技术在实际生产中的应用[J].自动化与仪器仪表ꎬ2015(10).[4]㊀陈兰芳ꎬ柴㊀山ꎬ孔彦虎.基于AB_ControlLogix控制器实现不同网络控制变频器的方法[J].甘肃冶金ꎬ2015(03).[5]㊀孔彦虎ꎬ陈兰芳ꎬ柴㊀山ꎬ等.基于DeviceNet网络实现ABPowerFlex755变频器自动控制方法研究[J].自动化与仪器仪表ꎬ2017(03).收稿日期:2019 ̄03 ̄22作者简介:陈兰芳(1965 ̄)ꎬ女ꎬ甘肃省嘉峪关市人ꎬ大学ꎬ高级工程师ꎮ主要从事工业自动化系统的应用开发与变频器维护工作ꎮ601㊀㊀㊀㊀㊀㊀㊀㊀㊀甘㊀肃㊀冶㊀金㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第41卷。
变频器的PID控制运行操作

变频器的PID控制运行操作一、背景介绍变频器是一种能够控制电机转速的调节装置,通过改变电源的频率来改变电机的转速。
PID控制是一种常用的自动控制方法,可以对变频器进行精确的转速控制。
PID控制器由比例(P)、积分(I)和微分(D)三个控制参数组成,通过对这些参数的调整可以实现准确的速度控制。
二、PID控制的原理PID控制器通过测量物理过程的输出(变频器的转速)与期望的输入(设定的转速)之间的误差来调整输出信号,从而使物理过程的输出尽可能地接近期望的输入。
具体来说,PID控制器实时计算输出信号,其计算公式为:输出信号=Kp×误差+Ki×积分(误差)+Kd×微分(误差)其中,Kp、Ki和Kd分别为比例、积分和微分参数,需要根据具体的应用进行调整。
三、PID控制在变频器中的实现1.设定转速:首先需要通过变频器的控制面板或者计算机软件设定期望的转速,将该值作为PID控制的目标输入。
2.传感器测量:使用传感器实时测量变频器的转速,将测量值作为PID控制的实际输出。
3.计算误差:将目标输入与实际输出进行比较,计算出PID控制需要的误差值。
4.控制器计算输出信号:根据PID控制的公式,通过调整参数Kp、Ki和Kd计算出控制器的输出信号。
5.输出信号传递:将控制器的输出信号传递给变频器,用于调节电源的频率,从而实现转速的控制。
6.参数调整:根据实际应用的需要,对PID控制器的参数进行调整,以提高控制的稳定性和精度。
7.循环控制:PID控制器会根据实时的误差值进行不断的计算和调整,以实现持续的转速控制。
四、PID控制在变频器中的优势1.高精度稳定性:PID控制器能够根据实时的误差值进行精确的调整,从而实现高精度的转速控制,提高了系统的稳定性。
2.快速响应:PID控制器能够快速地根据实时的误差值进行调整,从而具有快速的控制响应能力,适用于需要实时控制的场景。
3.鲁棒性:PID控制器具有较强的鲁棒性,对系统参数的变化和外部扰动具有一定的适应能力,能够保持较好的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PID技术在变频控制系统中的应用摘要:目前我国随着城市规模发展,居民生活用水,工业生产用水量逐步增大,城镇自来水厂及污水处理厂的建设占市政建设的比重也越来越大。
在污水处理厂中,由于每座污水处理厂都有收集污水的泵站,而提升泵又是收集污水的主要工艺设备,其耗电量占厂内总耗电量很大的比重,所以提升泵运控制过程好坏对于污水设备管理有着重要的意义。
目前我国大多数污水处理厂对于提升泵的运行管理还是采用的是人工调频,及定频后通过高液位关、低液位开的自动控制方式。
这两重方式很大成度上都存在这各自的不足。
为了解决这个问题我们采用PID控制方式,PID(比例积分微分)英文全称为Proportion Integration Differentiation,它是一个数学物理术语。
目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器、传感器、变送器、执行机构、输入输出接口。
控制器的输出经过输出接口、执行机构,加到被控系统上;控制系统的被控量,经过传感器,变送器,通过输入接口送到控制器。
不同的控制系统,其传感器、变送器、执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的能实现PID控制功能的可编程控制器(PLC)。
可编程控制器(PLC) 是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与ControlNet相连,如Rockwell的PLC-5等。
还有可以实现 PID控制功能的控制器,如Rockwell 的Logix产品系列,它可以直接与ControlNet相连,利用网络来实现其远程控制功能。
关键词:提升泵;PID;变频器;液位计;流量计;水量;水位;PLC;梯形图一:前言泵在工作原理上可分为容积式泵和叶轮式泵,和其它类型泵。
容积泵是靠工作部件的运动造成工作容积周期性地增大和缩小而吸排液体,并靠工作部件的挤压而直接使液体的压力能增加。
根据运动部件运动方式的不同又分为:往复泵和回转泵两类。
根据运动部件结构不同有:活塞泵和柱塞泵,有齿轮泵、螺杆泵、叶片泵和水环泵。
叶轮式泵是靠叶轮带动液体高速回转而把机械能传递给所输送的液体。
根据泵的叶轮和流道结构特点的不同叶轮式又可分为:1)离心泵(centrifugal pump)2)轴流泵(axial pump)3)混流泵(mixed-flow pump)4)旋涡泵(peripheral pump)在水厂及污水处理厂提升泵主要以叶轮泵为主,泵性能参数主要有流量和扬程。
所以提升泵的控制对于流量及水位的控制就尤为重要。
在水泵的电气控制系统中,主要以软启动及变频起动为主。
软启动器是一种集电机软起动、软停车、轻载节能和多种保护功能于一体的新颖电机控制装置。
它的主要构成是串接于电源与被控电机之间的三相反并联闸管及其电子控制电路。
运用不同的方法,控制三相反并联闸管的导通角,使被控电机的输入电压按不同的要求而变化,就可实现不同的启动功能。
变频器是应用变频技术与微电子技术,通过改变电机工作电源的频率和幅度的方式来控制交流电动机的电力。
软起动器和变频器是两种完全不同用途的产品。
变频器是用于需要调速的地方,其输出不但改变电压而且同时改变频率;软起动器实际上是个调压器,用于电机起动时,输出只改变电压并没有改变频率。
变频器具备所有软起动器功能,但它的价格比软起动器贵得多,结构也复杂得多。
在我国的大部分污水处理厂提升泵都采用的是以上两种启动及运行方式,由于全国各个污水处理厂工艺情况,及构筑物构成不同,现以武汉市黄家湖污水处理厂为例来进行论述。
黄家湖污水处理厂位于洪山区青菱乡。
其服务范围由蛇山南旧城区、晒湖地区、南湖地区、白沙洲地区、野芷湖地区五个部分组成,投入使用的泵站有一个。
厂区提升泵组由一台独立变频155KW潜水泵,一台独立软启动75KW潜水泵。
及2台一拖二变频/软启动潜水泵组成。
跟据运行人员经验一般情况开一台大泵就足够,在进水水量增大时需再加开一台75KW小泵,再当发生特殊紧急情况时才需增开第三台泵。
运行人员在提升泵控制方式上主要采用的是根据液位或水量,然后将变频器调整到一个固定频率。
当外来水量发生变化,导致水量增大,或液位增高时,再根据经验调整频率设定值。
这种控制方式在很多时侯都是十分有效的,但是在很多时侯也暴露出了不少问题。
在污水处理工艺构筑物中,例如沉砂池及氧化沟中,当提升泵抽水量过大,水力负荷过重,构筑物水位升高,会导致构筑物不均衡重力沉降及构筑物中电气设备严重受损。
另外还有在很多时候都要控制提升泵房的水位,当外来水量突然增大时,提升泵房水位增高,提升泵抽水效率会大幅,提高抽水量也会增大。
这时运行人员也需要适当的降低频率,但当降低频率后水量减小,水位又会降低,这时提升泵抽水量又会变小,此刻,又要增加频率。
这时运行人员又要调整,找到一个新的经验参数,而当有暴雨时,水量猛涨,这时运行人员控制水量就会反复调整变频器,使得控制十分麻烦。
所以变频器的控制发生就出现以下几个问题:1:稳定液位2:控制流量3:智能调节为解决以上问题,过国内外已有科研部门对多种控制系统进行研究,其中最主要的有开环控制系统及闭环控制系统。
1、开环控制系统开环控制系统(open-loop control system)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
2、闭环控制系统闭环控制系统(closed-loop control system)的特点是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。
闭环控制系统有正反馈和负反馈,若反馈信号与系统给定值信号相反,则称为负反馈( Negative Feedback),若极性相同,则称为正反馈,一般闭环控制系统均采用负反馈,又称负反馈控制系统。
每个厂区环境不同,调试方法无法达成统一的标准,现以黄家湖污水处理厂提升泵控制系统改造为科研课题进行研究,由于厂区内水位及流量对于厂区工艺构筑物影响极大,所以需选用PID闭环控制,希望能作为同类型的厂一个PID智能调节的案例,有不足之处,敬请指出。
二、稳定液位及其对策厂内提升泵房的变频器采用日产富士变频器,其有良好的变频性能,而海斯特提升泵也均能达到变频控制要求,最重要的就是PLC部分了。
厂区使用的是罗克韦尔公司(又称“AB”公司)的controllogix5000系列PLC,网络为EtherNET/IP(以太网)。
上位机软机选用RSVIEW,整个系统采用星形和环形的混合结构的拓扑网络。
自控系统分为2部分:第一部分由中心控制室上位机、PC终端、PLC主站、以太网以环形网络结构组成。
第二部分由PLC主站、现场以太网通信模块、I/O模块以星形网络结构组成。
各主站通过工业以太网与中控室进行实时数据交换及各模块之件的数据采集。
低压配电室的仪表信号则通过MODBUS通信模块采集数据信号,以实现MODBUS 通信网络与ControlLogix控制器之间的通信。
其自动化控制示意图如下:厂区1号提升泵变频器频率信号是通过进水泵房PLC1-1配电柜中1794-OE4模拟量输出模块,1794-IE8模拟量输入模块来实现变频器频率的输出与反馈的。
开关量状态及控制信号是通过1794-IB32开关量输入模块、1794-OB32开关量输出模块采集及控制。
而提升泵房液位信号通过1794-IE8模拟量输入模块来采集。
在具备了上述条件后,PID闭环控制基本能完成,PID控制几个基本变量:过程变量:液位(m),由1794-IE8模拟量输入模块采集控制变量:频率(HZ),由1794-OE4模拟量输出模块输出控制控制变量反馈量:频率(HZ),由1794-IE8模拟量输入模块采集另外,在PID控制中。
(1)比例(P)控制比例控制是一种最简单的控制方式。
其控制器的输出与输入误差信号成比例关系。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
(2)积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制器中必须引入“积分项”。
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。
这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
(3)微分(D)控制在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。
其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。
解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。
这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。
所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。
在调整PID时要注意以下一些问题1.直接计算法和增量计算法,增量计算法就是相对于标准计算法相邻两次运算之差,得到的结果就是增量,在上一次的控制量基础上需要增加(负值意位减少)控制量,对与液位控制而言就是要增加(或减少)频率的比例,根据具体的应用适当选择算法,但控制原理是一样的,直接计算得到的是当前需要的控制量,相邻两次控制量的差就是增量。
2.基本偏差e(t):表示当前值与设定值之差,设定目标是被减数,结果可正可负,在液位控制例程中,设定控制水位为5米,而实际水位为6米,当前值就是6米设定水位,设定值就是5米控制水位。
3.累计偏差:∑e(t)=e(t)+e(t-1)+e(t-2)+e(t-3)+.....+e(t-n)这个是我们每次测量偏差值之和。
通过在上位机软件LOGIX5000对PLC进行组态,编程。
调出LOGIX5000中的PID模块,再相应的做好对应的地址标签,将液位信号做为过程变量,再将输出频率做为控制变量,由于现场子站到总站PLC传输距离问题,导致模拟量4-20MA电流在线路上有损耗。