理论力学第三章习题解析
清华大学版理论力学课后习题答案大全_____第3章静力学平衡问题习题解
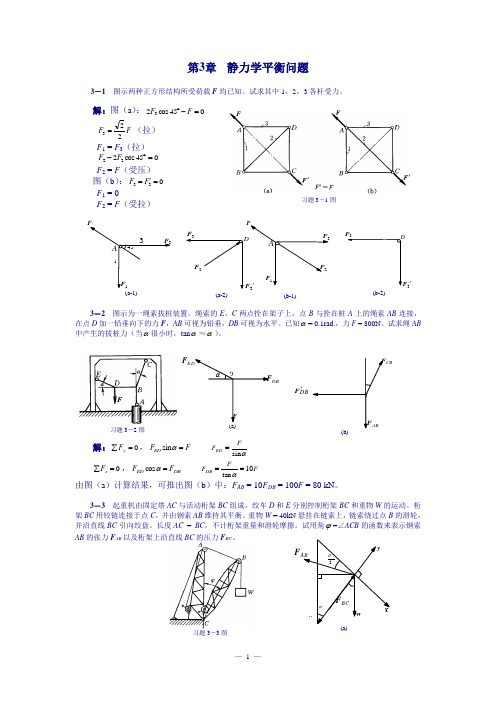
F DBCBDBF '习题3-3图第3章 静力学平衡问题3-1 图示两种正方形结构所受荷载F 均已知。
试求其中1,2,3各杆受力。
解:图(a ):045cos 23=-︒F FF F 223=(拉) F 1 = F 3(拉) 045cos 232=︒-F F F 2 = F (受压) 图(b ):033='=F F F 1 = 0F 2 = F (受拉)3-2 图示为一绳索拔桩装置。
绳索的E 、C 两点拴在架子上,点B 与拴在桩A 上的绳索AB 连接,在点D 加一铅垂向下的力F ,AB 可视为铅垂,DB 可视为水平。
已知α= 0.1rad.,力F = 800N 。
试求绳AB 中产生的拔桩力(当α很小时,tan α≈α)。
解:0=∑y F ,F F ED =αsin αs i nFF ED = 0=∑x F ,DB ED F F =αcos F FF DB 10tan ==α由图(a )计算结果,可推出图(b )中:F AB = 10F DB = 100F = 80 kN 。
3-3 起重机由固定塔AC 与活动桁架BC 组成,绞车D 和E 分别控制桁架BC 和重物W 的运动。
桁架BC 用铰链连接于点C ,并由钢索AB 维持其平衡。
重物W = 40kN 悬挂在链索上,链索绕过点B 的滑轮,并沿直线BC 引向绞盘。
长度AC = BC ,不计桁架重量和滑轮摩擦。
试用角ϕ=∠ACB 的函数来表示钢索AB 的张力F AB 以及桁架上沿直线BC 的压力F BC 。
(b-1)习题3-1图(a-1)(a-2)'3(b-2)习题3-2图F习题3-5图习题3-4图 解:图(a ):0=∑x F ,0sin 2cos=-ϕϕW F AB ,2sin2ϕW F AB =0=∑y F ,02sincos =---ϕϕAB BC F W W F即 2s i n 2c o s 2ϕϕW W W F BC ++=W W W W 2)c o s 1(c o s =-++=ϕϕ3-4 杆AB 及其两端滚子的整体重心在G 点,滚子搁置在倾斜的光滑刚性平面上,如图所示。
胡汉才编著《理论力学》课后习题答案第3章习题解答(精编文档).doc

【最新整理,下载后即可编辑】3-3在图示刚架中,已知kN/m3=mq,26=F kN,mkN10⋅=M,不计刚架自重。
求固定端A处的约束力。
mkN12kN60⋅===AAyAxMFF,,3-4杆AB及其两端滚子的整体重心在G点,滚子搁置在倾斜的光滑刚性平面上,如图所示。
对于给定的θ角,试求平衡时的β角。
Aθ3lGβGθBBFARF32lO解:解法一:AB为三力汇交平衡,如图所示ΔAOG中βsinlAO=,θ-︒=∠90AOG,β-︒=∠90OAG,βθ+=∠AGO由正弦定理:)90sin(3)sin(sinθβθβ-︒=+ll,)cos31)sin(sinθβθβ=+l即βθβθθβsincoscossincossin3+=即θβtantan2=)tan21arctan(θβ=解法二::=∑xF,0sinR=-θGF A(1)=∑yF,0cosR=-θGF B(2))(=∑F A M ,0sin )sin(3R =++-ββθl F lG B (3)解(1)、(2)、(3)联立,得)tan 21arctan(θβ=3-5 由AC 和CD 构成的组合梁通过铰链C 连接。
支承和受力如图所示。
已知均布载荷强度kN/m 10=q ,力偶矩m kN 40⋅=M ,不计梁重。
kN 15kN 5kN 40kN 15===-=D C B A F F F F ;;;解:取CD 段为研究对象,受力如图所示。
0)(=∑F C M ,024=--q M F D ;kN 15=D F 取图整体为研究对象,受力如图所示。
0)(=∑F A M ,01682=--+q M F F D B ;kN 40=B F 0=∑y F ,04=+-+D B Ay F q F F ;kN 15-=Ay F 0=∑x F ,0=Ax F3-6如图所示,组合梁由AC 和DC 两段铰接构成,起重机放在梁上。
已知起重机重P1 = 50kN ,重心在铅直线EC 上,起重载荷P2 = 10kN 。
理论力学课后习题第三章解答

理论力学课后习题第三章解答3.1解 如题3.1.1图。
均质棒受到碗的弹力分别为,棒自身重力为。
棒与水平方向的夹角为。
设棒的长度为。
由于棒处于平衡状态,所以棒沿轴和轴的和外力为零。
沿过点且与轴平行的合力矩为0。
即:①②③ 由①②③式得:④ 又由于即⑤ 将⑤代入④得:图题1.3.11N ,2N G θl x y A z 0sin 2cos 21=-=∑θθN N F x0cos 2sin 21=-+=∑G N N Fyθθ0cos 22=-=∑θlG c N M i ()θθ22cos 1cos 22-=c l ,cos 2c r =θrc 2cos =θ3.2解 如题3.2.1图所示,均质棒分别受到光滑墙的弹力,光滑棱角的弹力,及重力。
由于棒处于平衡状态,所以沿方向的合力矩为零。
即①由①②式得:所以()cr c l 2224-=o图题1.3.21N 2N G y 0cos 2=-=∑G N Fyθ0cos 22cos 2=-=∑θθlG d N M z ld=θ3cos 31arccos ⎪⎭⎫ ⎝⎛=l d θ3.3解 如题3.3.1图所示。
棒受到重力。
棒受到的重力。
设均质棒的线密度为。
由题意可知,整个均质棒沿轴方向的合力矩为零。
3.4解 如题3.4.1图。
轴竖直向下,相同的球、、互切,、切于点。
设球的重力大小图题1.3.32AB i G ag ρ=1i G bgρ=2ρz ()BH BF G OD G M z --⋅=∑21sin θ=0sin cos 2sin 2=⎪⎭⎫ ⎝⎛--θθρθρa b gb a ga aba b 2tan 22+=θ图题1.3.4Ox A B C B C D为,半径为,则对、、三个球构成的系统来说,在轴方向的合力应为零。
即:①对于球,它相对于过点与轴平行的轴的合力矩等于零。
即:②由式得:3.5解 如题3.5.1图。
梯子受到地面和墙的弹力分别为,,受地面和墙的摩擦力分别为,。
理论力学第三章题解

理论力学题解第三章 思考题3.1. 仅(4)式正确.3.2. 甲正确. 乙错在角度不可以定义为从动线指向定线.3.3. 乙的方程正确. 甲错在空气阻力亦应为yk -,y 取负值,y k -取正值. 3.4. 仅对固定方向才有动量守恒的分量形式. 径向和横向均不是空间固定方向.3.5. (1)对;(2)错.3.6. 一质点动量守恒,则对空间任一固定点角动量守恒. 质点对空间某一固定点角动量守恒,其动量不一定守恒.3.7. 质点作匀速直线运动时,其动量和角动量均守恒.3.8. 动能定理是标量方程,不可能投影而得出分量方程. 但x F mv x x d )21(d 2=是正确的.仿照动能定理的导出,用x t v x d d =乘牛顿第二定律的x 分量方程x xF tv m =d d 即可证明.第三章 习题3.1. 力为时间的函数,积分两次可得)cos(200ϕωω+++=t m eE t V X x ,其中ϕωcos 2000m eE x X -=,ϕωsin 000m eE v V +=. 3.2. 以地心O 为原点,建立x 轴经抛出点竖直向上. 质点受万有引力沿x 轴负方向. 所以2x GMm xm -= . 因为2RGMm mg =,故g R GM 2=. 故有 22xg R x -= . 做变换)2(d d d d d d d d 2x x x xx t x x x x ===,则x x gR x d )2(d 222-= . 积分并用0=t 时R x =,0v x= 定积分常数,得到 )11()(212202Rx g R v x -=- . 质点达最大高度时H R x +=,0=x,可求出12020)21(2--=Rgv g v H .三点讨论:(1)令∞=H ,对应Rg v 20=为第二宇宙速度.(2)若Rg v 220<<,则回到重力场模型所得结果.(3)题中不考虑地球自转及空气阻力,均不大合理,试进一步讨论之.3.3. 质点运动微分方程为(Oy 轴竖直向上);上升阶段22y g mk mg ym --=,下降阶段22y g mk mg ym +-=. 3.4. 可参见例题3. 令meB=ω,电子运动微分方程为 y x ω-=, (1) meEx y-= ω, (2) 0=z. (3) 对(2)式求导,利用(1)式得02=+y yω,解出)sin(αω+=t A y . 0=t 时0=y 故0=α,由t A y ωωcos =,且0=t 时m eBv Ee y 0+-= ,故BBv E A 0+-=,则t B Bv E yωsin 0+-= . 积分得)cos 1()(20t m eBeB Bv E m y -+-=. 代入(1)式积分可得t m eB eB Bv E m t B E x sin )(20--=. 3.5. (旋轮线是如图圆轮在直线AB 上作无滑滚动时P 点的轨迹,曲线上P 点切线方向即为轮上P 点速度方向. 因无滑,0P 为瞬心,故P 点切线与P P 0垂直,因此可知P 点切线与x 轴夹角为2ϕ. ) 以曲线最低点(0=ϕ)为自然坐标原点,弧长正方向与t e一致. 质点运动微分方程为2sinϕmg s m -= .对曲线参数方程求微分,得ϕϕd )cos 1(d +=a x 和ϕϕd sin d a y =,所以ϕϕd 2cos2d d d 22a y x s =+=,积分并用0=ϕ时0=s 定积分常数,得2sin 4ϕa s =. 代入质点运动微分方程消去ϕ,得到04=+s a gs ,s 作简谐振动而具有等时性. 其解为)cos(0αω+=t A s ,ag 40=ω与振幅无关.3.6. 小球运动微分方程为T F r r m -=-)(2θ , (1) 0)2(=+θθr r m , (2) a r-= . (3) 由(3)式求出at R r -=,代入(2)式求出)/(0at R t v -=θ,再由(1)式求出3220)(--=at R R mv F T .3.7. 珠子的运动微分方程为2b 2n d d N N F F tv m+-=μ, (1) n 2/N F mv =ρ, (2) mg F N -=b 0, (3)R =ρ(约束方程). (4)把(2)、(3)、(4)式代入(1)式,作变换s v t v d /)21(d d d 2=,可求出]/)ln[()2/(224020Rg g R v v R s ++=μ.3.8. 以椭圆最低点为自然坐标原点O ,弧长正方向指向小球初始位置,θ为切向与水平方向的夹角,小球的运动微分方程为θsin mg vm -= , (1) θρcos /2mg F mv N -=. (2)Oy 竖直向上,将s y d /d sin =θ代入(1)式得s y g s v v d /d d /d -=,积分可求出小球达最低点时gb v 22=. 由轨道方程22x a aby --=求出当0=x 时0='y ,2/a b y ='',由公式可求出22/32)1(1a by y ='+''=ρ. 再由(2)式求出0=θ时)/21(/cos 222a b mg mv mg F N +=+=ρθ.3.9. 11bF M x =,11aF M y -=,01=z M ,2222/b a bcF M x +=,2222/b a acF M y +-=,02=z M .3.10. 由运动学方程求出→v ,根据定义即可求出→→→→→→++--=⨯=k r m j t t t r km i t t t r km v r m L ωωωωωωω200000000)sin (cos )cos (sin ,)]cos ()sin )([(]cos )()sin ([000000),,(a t r k t r c kt m m t r c kt b t r k l m L n m l -+-----=ωωωωωω)sin cos (00200t br t ar r n m ωωωωω--+.3.11. 由对21O O 轴的角动量定理ωαωm l ml t-=)(d d2,积分可得l t /0e αωω-=,求出α/)2ln (l t =. 将角动量定理化为l /d d θαω-=,积分可以求得αωαωθπ4/)rad (2/00l l ==(圈).3.12. (1)由动能定理)(4121212222122b a mk mv mv W -=-=. (2)用曲线积分算⎰⎰+=⋅=→→2121)d d (y ym x x m r d F W ,把轨道参数方程kt b y kt a x sin ,cos ==代入,则曲线积分化为对t 的积分,可得同样结果.3.13. 珠子的动能定理为s F F mv N N d )21(d 2b 2n 2+-=μ,参见3.7提示. 3.14. 因机械能守恒,小球动能不变,因此0v v =.过O 点作z 轴竖直向上(垂直纸面向外),质点对z 轴的角动量δcos rmv L z =. 质点所受对z 轴力矩δsin N z rF M -=. 由对z 轴的角动量定理得δδsin )cos (d d0N rF rmv t-=. 由于θθθθθ ar ar t r rv a r -=-===-e d d d d 0,θθr v =. 故a v v r =-=θδtan . 将它代入角动量定理方程,得到N N arF rF rmv -=-=δtan 0 . 而δδsin sin 0v v v rr -=-== ,所以θδδδa N ar mv a r mv armv ar mv F e 11tan 1tan sin 2020220222020+=+=+==. 3.15. 当0=⨯∇→F 时势能存在,要求311332232112,,a a a a a a ===. 以原点为势能零点,则)444(21132312233222211xz a zy a xy a z a y a x a V +++++-=. 3.16. )/cos (d d d )d d (d 2r pq r F r F e r e r F r F r r θθθθθ-=+=+⋅=⋅→→→→→,故为有势场. 3.17. y ky x kx y ky ky x b x k b x k r F d 2d 2d )(d )]()([d --=--+--+-=⋅→→)](d [22y x k +-=.故势能存在. 以O 为势能零点,则)(22y x k V +=. 3.18. 根据机械能守恒定律,以椭圆弧最低点为势能零点,mgb mv =221,可知gb v 2=,参见3.8提示. 3.19. 3.20. 3.21.。
理论力学(胡运康)第三章作业答案

11
3-26 已知:M1=10kN,求FBx 、 FBy 、MB 、FAC 、 FEx 、 FEy 解: 1、整体:
∑M
∑F
MB
FBx FBy
x
B
= 0 ⇒ MB
= 0 ⇒ FBx = 0
= 0 ⇒ FBy
∑F
y
2、AB: FD
A
FEy
E
∑M
FEx
B
E
= 0 ⇒ FD
∑F
∑F
x
= 0 ⇒ FEx
= 0 ⇒ FEy
3-42 已知:q1=4kN/m , q2=2kN/m ,F =2 kN ,M=2 kN.m 。求 A、B处受力;销钉C所受的力。
F1 F2
F B FB FC1y C FC2y
C FC2y 1m
4/3 m
q 解: 1、BC: F1 = 1 ⋅ 2 = 4kN, 2
F2 =
1 q1 ⋅ ⋅ 2 = 2kN 2 2
M1 B
FE
Aቤተ መጻሕፍቲ ባይዱ
∑M
2、DC:
M2
FC
x
A
= 0, ⇒ FE
F'E
D
FE= F'E
C FCy
∑M
C
= 0, ⇒ M 2
8
3-17 求 机构平衡时力偶M1、M2的关系。
FAx FAy
A
FD F'D D
B
M1
FD= F'D
FCx
M2
C FCy
解: 1、AB: ∑ M A = 0, FD ⋅ d − M 1 = 0, ⇒ FD = M 1
2
3-3
几何法
理论力学答案第三章

《理论力学》第三章作业参考答案习题3-9解:力F在x 、y 坐标轴上的投影分别为:)(03.169100050301010222N F x =⨯++=)(09.507100050301030222N F y =⨯++=力F作用点的坐标为1500.15x m m m =-=-,(10050)0.15y mm m =+=。
所以,0.15507.090.15169.09101.4(.)Z y x M xF yF N m =-=-⨯-⨯≈-答: 力F对z 轴的力矩为-101.4Nm .习题3-11解:力F在x 、y 、z 坐标轴上的投影分别为:00cos 60cos 304x F F F ==1cos 60sin 304y F F F=-=-FF F Z 2360sin 0-=-=力F的作用点C 的坐标为1sin 302o x r r==,cos 302o y r ==,z h =。
所以,()Fr h F h F r zF yF My z X341412323-=⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫ ⎝⎛-=-=()F r h F r F h xF zF Mz x y+=⎪⎪⎭⎫ ⎝⎛--⎪⎪⎭⎫ ⎝⎛=-=4323243rF F r F r yF xF Mxy Z214323412-=⎪⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-=-=答:力F对x 、y 、z 轴的矩分别为:()134h r F -,)4h r F +,12rF-。
习题3-12解:以整个支架为研究对象。
由于各杆为二力杆,球铰链A 、B 、C 处的约束力A F 、B F 、C F 沿杆件连线汇交于D 端球铰链,与物块的重力P构成一空间汇交力系,其受力情况如图所示。
以O 为原点建立坐标系,列平衡方程,我们有⎪⎪⎩⎪⎪⎨⎧===∑∑∑000z y x F F F⎪⎩⎪⎨⎧=-++=++=-015sin 30sin 45sin 30sin 45sin 015cos 30cos 45sin 30cos 45sin 045cos 45cos 000000000000P F F F F F F F F C B A C B A B A 解之得:()()()cos1526.39()2sin 45sin 3015cos1526.39()2sin 45sin 3015cos 3033.46()sin 3015o A o o ooB o o ooC o o P F kN P F kN F P kN ⎧⎪==-⎪⎪⎪==⎨-⎪⎪⎪=-=-⎪-⎩答:铰链A 、B 的约束力均等于26.39kN ,方向与图示相同,即为压力,铰链C 的约束力等于-33.46 kN ,方向与图示相反,即为拉力。
《理论力学》第三章-受力分析试题及答案

理论力学3章作业题解
3-1 作下列指定物体的示力图。
物体重量除图上已注明者外,均略去不计。
假设接触处都是光滑的。
题2-1 附图
解答:(a) A 、B 处为光滑接触,产生法向约束力。
(b) A 处为固定铰,能产生水平和竖向约束力;B 处为活动较,产生法向约束力。
(c) A 、C 处为光滑接触,产生法向约束力。
A
B C
D
轮
(d) O 处为固定铰,BC 简化为连杆约束。
(e) A 处为固定铰,B 处为绳子约束,产生拉力。
(f) A 处为固定铰,BC 为连杆约束。
(g) A 处为固定铰;B 、D 处为连杆约束;C 处为铰链接,此处销钉约定放在某个物体上,所以要满足作用与反作用定律。
(h) A 、B 处为光滑接触,产生法向约束力; C 处为铰链接,此处销钉约定放在某个物体上,所以要满足作用与反作用定律;DE 为绳子约束。
(f)
(d)
(a)
(b)
C
(c)
(g) F
A
F (h)
(i) B 处为固定铰;AC 为连杆; C 处为铰链接,销钉约定放在轮子上;E 处为绳子约束。
3-3 试作图示刚架及ACB 部分的示力图。
A
C
q
C
q
F F F F Cy
Cx
整体
ABC 部分
F 1。
理论力学课外作业加答案解析详解
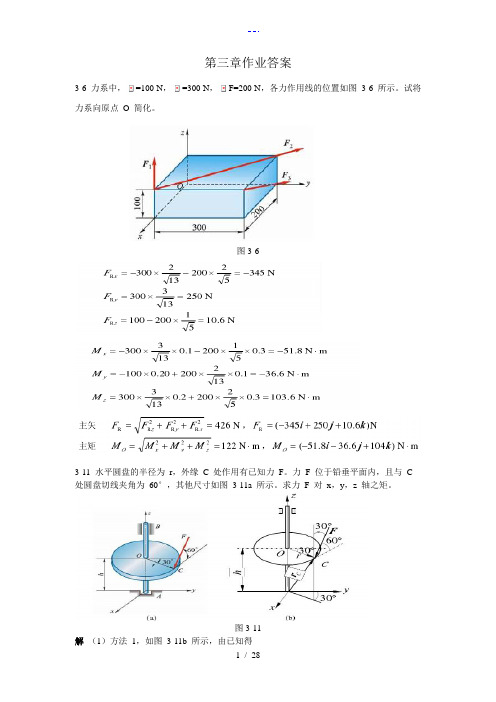
第三章作业答案3-6 力系中,=100 N,=300 N,F=200 N,各力作用线的位置如图3-6 所示。
试将力系向原点O 简化。
图3-63-11 水平圆盘的半径为r,外缘C 处作用有已知力F。
力F 位于铅垂平面内,且与C 处圆盘切线夹角为60°,其他尺寸如图3-11a 所示。
求力F 对x,y,z 轴之矩。
图3-11解(1)方法1,如图3-11b 所示,由已知得(2)方法23-14 图3-14a 所示空间桁架由杆1,2,3,4,5 和6 构成。
在节点A 上作用1 个力F,此力在矩形ABDC 平面内,且与铅直线成45°角。
ΔEAK =ΔFBM。
等腰三角形EAK,FBM和NDB 在顶点A,B 和D 处均为直角,又EC=CK=FD=DM。
若F=10 kN,求各杆的内力。
图3-14解(1) 节点 A 为研究对象,受力及坐标如图3-14b 所示(2)节点B 为研究对象,受力如图3-14b 所示3-19 图3-19a 所示6 杆支撑1 水平板,在板角处受铅直力F 作用。
设板和杆自重不计,求各杆的内力。
图3-19解截开6 根杆,取有板的部分为研究对象,受力如图3-19b 所示。
3-22 杆系由球铰连接,位于正方体的边和对角线上,如图3-22a 所示。
在节点D 沿对角线LD 方向作用力。
在节点C 沿CH 边铅直向下作用F。
如球铰B,L 和H 是固定的,杆重不计,求各杆的内力。
图3-22解(1)节点D 为研究对象,受力如图3-22b 所示(2)节点C 为研究对象,受力如图3-22b 所示3-25 工字钢截面尺寸如图3-25a 所示,求此截面的几何中心。
图3-25解把图形的对称轴作轴x,如图3-25b 所示,图形的形心C 在对称轴x 上,即第五章作业答案5-3 如图5-3 所示,半圆形凸轮以等速= 0.01m/s沿水平方向向左运动,而使活塞杆AB 沿铅直方向运动。
当运动开始时,活塞杆A 端在凸轮的最高点上。
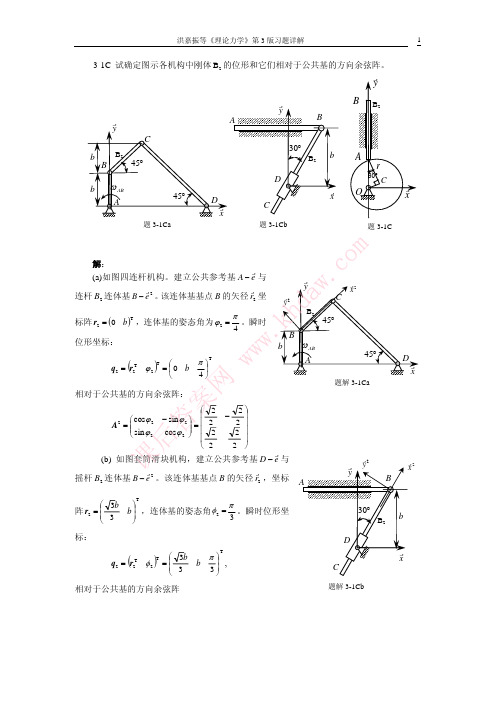
理论力学第三章习题解答

连杆 B2 :连体基基点 B 的矢径 r2 ,坐标阵 r2 = (0 b ) ,连体基的姿态角为
π ϕ 2 = 。瞬时位形坐标 q 2 = r2T 4
(
ϕ2 )
T
⎛ = ⎜0 b ⎝
π⎞ ⎟ 4⎠
T
-2-
⎛ cos ϕ 2 A2 = ⎜ ⎜ sin ϕ 2 ⎝
⎛ − sin ϕ 2 ⎞ ⎜ ⎟=⎜ cos ϕ 2 ⎟ ⎠ ⎜ ⎜ ⎝
3r 2
π⎞ ⎟ 3⎟ ⎠
T
⎛ cos ϕ 3 A3 = ⎜ ⎜ sin ϕ 3 ⎝
⎛ − sin ϕ 3 ⎞ ⎜ ⎟=⎜ cos ϕ 3 ⎟ ⎠ ⎜ ⎜ ⎝
3⎞ ⎟ 2 ⎟ 1 ⎟ ⎟ 2 ⎠
(3) 凸轮挺杆机构,其中 O 为偏心轮,AB 为挺杆。
-4-
题 3-1 图 题 3-1 答案图(3) 解:建立公共参考基 O − e ,对二个构件进行编号并建立连体基
⎛ cos ϕ 2 A2 = ⎜ ⎜ sin ϕ 2 ⎝
T 2
ϕ2 )
T
⎛ = ⎜0 ⎝
r 2
⎞ 0⎟ , ⎠
T
− sin ϕ 2 ⎞ ⎛ 1 0 ⎞ ⎟=⎜ ⎟ ⎜ ⎟ cos ϕ 2 ⎟ ⎠ ⎝0 1⎠
-7-
3-2 图示长为 0.2m 的直杆,一端沿水平线运动,方向如图所示,一端沿 铅垂线运动,分别在其端部 A 和杆件中点 C,以及在其端部 A 和 B 分别建立两 个连体基。试求两个连体基位形坐标之间的关系。
理论力学第三章习题解答理论力学习题解答理论力学课后习题答案理论力学习题理论力学习题集理论力学运动学习题理论力学习题详解理论力学习题答案理论力学课后习题理论力学复习题及答案
第三章习题解答
理论力学(机械工业出版社)第三章空间力系习题解答

3-1 在边长为a 的正六面体上作用有三个力,如图 3-26所示,已知:F i =6kN, F 2=2kN, F 3=4kN 。
试求各力在三个坐标轴上的 投影。
图 3-26所示,已知六面体尺寸为 400 mmx 300 mmx300mm 正面有力F i =100N,中间有力F 2=200N,顶面有力偶 M=20N ・m作用。
试求各力及力偶对 z 轴之矩的和。
图 3-274 M z F 1 COS 450.40.3 20 J 34 20^2-240207.125 N m3-3如图3-28所示,水平轮上 A 点作用一力F =1kN,方向与 轮面成a=60°的角,且在过A 点与轮缘相切的铅垂面内,而点 A与轮心0的连线与通过0点平行于y 轴的直线成 b=45°角,图 3-28F COS sin 1000 COS 60 sin 45250^2 N 354 NF COS COS 1000 COS 60 sin 45250 (0 N 354 NF 1x 0F 1yF 2xF 2 COS 45讨仃 4 J 3F iz 72 kNF ,6 kNF 3X F ^y — kNF ayF 2yF COS 45734巧 F^ —— kN 33F 2—33kN3-2 如图 3-27 h =r=1m 。
试求力F 在三个坐标轴上的投影和对三个坐标轴之矩。
F xF z F sin 1000 sin 60 500 866 NM x (F) |F y | h |F z | 1 r cos 354 1866 1 cos 45258 N m M y (F) |F x | h |F z | r sin 354 1 866 1sin 45966 N mM z (F)F cosr1000 cos60 1500 N m主矩。
图 3-30F R xF 1 “2 屁200^5 100(14 821 .4NF R yF 2乐150714 561 .2NF RZF 1亦 F ?L 100V 5 50^14410.7NV 14F RJ ( 821.4)2( 2561.2)2410.71076.3N3-4 曲拐手柄如图3-29所示,已知作用于手柄上的力F =100N, AB=100mm BC=400mrm CC =200mrm a=30°。
理论力学教程(第三版)第三章 周衍柏编

P
∫ yc =
θ0 ρdθR(R cosθ
−θ0
θ0 ρRdθ
− R) = −R + sinθ0
θ0
R
∫−θ0
上式中 ρ 为圆弧的线密度
l = R − sinθ0 R ② θ0
又
[ ] ∫ I =
θ0 ρR (R cosθ − R)2 + (R sinθ )2 dθ
−θ 0
=
c2 ⎜⎜⎝⎛1 −
y2 b2
⎟⎟⎠⎞
故积分
H
S(y)
=
πac⎜⎜⎝⎛1 −
y2 b2
⎟⎟⎠⎞
P∫ ∫ ∫ y2dm =
b −b
y2S(y)
⋅
ρdy
=
b −b
y2πac⎜⎜⎝⎛1 −
y2 b2
⎟⎟⎠⎞ρdy
=
4 πρab3c 15
同理可求
∫ ∫ x2dm = 4 πρa3bc, z2dm = 4 πρabc3
第三章习题解答
3.1 解 如题 3.1.1 图。
y
N1 o
N2 θ
B
θ
x
θθ
G
A
题3.1.1图
S C
I 均质棒受到碗的弹力分别为 N1 , N2, 棒自身重力为G 。棒与水平方向的夹角为
θ 。设棒的长度为 l 。
S 由于棒处于平衡状态,所以棒沿 x 轴和 y 轴的和外力为零。沿过 A 点且与
z 轴平行的合力矩为 0。即:
I
S O 为正方体中心。Ox 、Oy 、Oz 分别与正方体的边平行。由对称性可知,Ox 、
Oy 、Oz 轴就是正方体的中心惯量主轴。设正方体的边长为 a 。设为平行于轴的 一小方条的体积,则正方体绕轴的转动惯量
E420-理论力学-动力学第三章部分习题解答

动力学第三章部分习题解答3-3 取套筒B 为动点,OA 杆为动系 根据点的复合运动速度合成定理r e a v v v +=可得:l v v ω==e 0a 30cos ,l v v v BC B ω332a === 研究AD 杆,应用速度投影定理有:030cos D A v v =,l v D ω334=再取套筒D 为动点,BC 杆为动系,根据点的复合运动速度合成定理r D BC D v v v +=将上式在x 轴上投影有:r D BC D v v v +-=-,l v v v BC D D ω332r =+-=3-4 AB 构件(灰色物体)作平面运动, 已知A 点的速度s A O v A /0cm 4510==ωAB 的速度瞬心位于C ,应用速度瞬心法有:rad/s 23==AC v A AB ω BC v AB B ω=,设OB 杆的角速度为ω,则有rad/s 415==OB v B ω 设P 点是AB 构件上与齿轮I 的接触点, 该点的速度:CP v AB P ω=齿轮I 的角速度为:rad/s 61==r v PI ω a v e vr vA vDv rD v A vB P v CAB ωI ω3-6 AB 杆作平面运动,取A 为基点 根据基点法公式有:BA A B v v v +=将上式在AB 连线上投影,可得0,01==B O B v ω因此,041ωω==AB v A AB因为B 点作圆周运动,此时速度为零,因此只有切向加速度(方向如图)。
根据加速度基点法公式n t BA BAA B aaa a ++=将上式在AB 连线上投影,可得n060cos BA A B a a a +=-,r a B 205.2ω-=201231ωα-==B O a B B O (瞬时针)3-7 齿轮II 作平面运动,取A 为基点有nt BA BA A B a a a a ++= n t 1BA BA a a a a ++=将上式在x 投影有:n 1cos BA a a a -=-β由此求得:212n 2cos 2r a a r a BAII βω+==再将基点法公式在y 轴上投影有:2t2sin r a a II BA αβ==,由此求得22sin r a II βα=再研究齿轮II 上的圆心,取A 为基点n t n t2222A O AO A O O aaa aa++=+将上式在y 轴上投影有2sin 2t t 22βαa r a a II AO O ===, B vBAv A vAa Ba t BA an BA atBA anBA axyt2A Oa n 2AO a xyn 2O a t 2Oa由此解得:)(2sin 2121t 221r r a r r a OO O +=+=βα再将基点法公式在x 轴上投影有:n1n22A O O a a a -=- 由此解得:2cos 1n2a a a O -=β,又因为221n 212)(O O O r r a ω+= 由此可得:)(2cos 21121r r a a O O +-±=βω3-9 卷筒作平面运动,C 为速度瞬心, 其上D 点的速度为v ,卷筒的角速度为r R vDC v -==ω 角加速度为rR ar R v -=-== ωα 卷筒O 点的速度为:rR vRR v O -==ω O 点作直线运动,其加速度为 rR aRr R R v va O O -=-==研究卷筒,取O 为基点,求B 点的加速度。
理论力学简明教程第三章非惯性参考系课后答案
第三章 非惯性参考系不识庐山真面目,只缘身在此山中。
地球的多姿多彩,宇宙的繁荣,也许在这里可以略见一斑。
春光无限,请君且放千里目,别忘了矢量语言在此将大放益彩。
【要点分析与总结】1 相对运动t r r r '=+t t dr dr dr dr dr r dt dt dt dt dtυω'''==+=++⨯ t r υυω''=++⨯()t dv dv d v r a dt dt dtω''+⨯==+222**22()t d r d r d dr r v r dt dt dt dtωωωω'''''=++⨯+⨯+⨯+⨯()2t a a r r v ωωωω''''=++⨯+⨯⨯+⨯t c a a a '=++〈析〉仅此三式便可以使“第心说”与“日心说”归于一家。
(1) 平动非惯性系 (0ω=)t a a a '=+ 即:()t ma F ma '=+-(2) 旋转非惯性系 (0t t a υ==)()2a a r r ωωωωυ''''=+⨯+⨯⨯+⨯2 地球自转的效应(以地心为参考点)2mr F mg m r ω=--⨯写成分量形式为:2sin 2(sin cos )2cos x y z mx F m y my F m x z mz F mg m y ωλωλλωλ⎧=+⎪=-+⎨⎪=-+⎩ 〈析〉坐标系选取物质在地面上一定点O 为坐标原点,x 轴指向南方,y 轴指向东方,铅直方向为 z 轴方向。
2mr F mg m r ω=--⨯ 为旋转非惯性系 ()2F mg mr m r m r m r ωωωω-=+⨯+⨯⨯+⨯在 ,rR ωω条件下忽略 m r ω⨯与 ()m r ωω⨯⨯所得。
正因如此,地球上的物体运动均受着地球自转而带来的科氏力 2m r ω-⨯的作用,也正是它导致了气旋,反气旋,热带风暴,信风,河岸右侧冲刷严重,自由落体,傅科摆等多姿多彩的自然现象。
理论力学习题答案第三章

第三章思考题解答3.1 答:确定一质点在空间中得位置需要3个独立变量,只要确定了不共线三点的位置刚体的位置也就确定了,故须九个独立变量,但刚体不变形,此三点中人二点的连线长度不变,即有三个约束方程,所以确定刚体的一般运动不需3n 个独立变量,有6个独立变量就够了.若刚体作定点转动,只要定出任一点相对定点的运动刚体的运动就确定了,只需3个独立变量;确定作平面平行运动刚体的代表平面在空间中的方位需一个独立变量,确定任一点在平面上的位置需二个独立变量,共需三个独立变量;知道了定轴转动刚体绕转动轴的转角,刚体的位置也就定了,只需一个独立变量;刚体的平动可用一个点的运动代表其运动,故需三个独立变量。
3.2 答物体上各质点所受重力的合力作用点即为物体的重心。
当物体的大小远小于地球的线度时物体上各质点所在点的重力加速度都相等,且方向彼此平行即重力场为均匀场,此时质心与重心重合。
事实上但物体的线度很大时各质点所在处g 的大小是严格相等,且各质点的重力都指向地心,不是彼此平行的,重心与质心不和。
答 当物体为均质时,几何中心与质心重合;当物体的大小远小于地球的线度时,质心与重心重合;当物体为均质且大小远小于地球的线度时,三者都重合。
3.4 答 主矢F 是力系各力的矢量和,他完全取决于力系中各力的大小和方向,故主矢不随简化中心的位置而改变,故而也称之为力系的主矢;简化中心的位置不同,各力对简化中心的位矢i r 也就不同则各力对简化中心的力矩也就不同,故主矩随简化中心的位置而变,被称之为力系对简化中心的主矩。
分别取O 和O '为简化中心,第i 个力i F 对O 和O '的位矢分别为i r 和i r ',则i r =i r '+O O ',故()()iii ii i O F O O r F r M ⨯'-'=⨯'=∑∑'()∑∑⨯'-⨯'=ii ii i F O O F r ∑⨯'+=ii o F O O M即o o M M ≠'主矢不变,表明刚体的平动效应不变,主矩随简化中心的位置改变,表明力系的作用对刚体上不同点有不同的转动效应,但不改变整个刚体的转动规律或者说不影响刚体绕质心的转动。
理论力学3章

习 题3-1 台阶形鼓轮装在水平轴上,小头重量为2Q ,大头重量为1Q ,半径分别为2r 和1r ,分别挂一重物,物体A 重为2P ,物体重B 为1P ,且12P P >。
如3-1题图所示,求鼓轮的角加速度。
解:本题有明显的转轴o ,因而可以用角动量定理求解。
系统只有一个转轴,求运动而不求内力,所以取质心为研究对象。
因重力12,P P对轴o 的力矩不为零,可得:01122()L PQ PQ k =-质心系的动量距为:21202OQ OP OP k J J J J =+++2212121212211()22Q Q p p r r v v r k g g g gωωω=+++ 另外还有运动学补充方程:1122v r v r ωω==所以22220112211221(22)2J Q r Q r Pr P r k gω=+++应用角动量定理由 0i d J L dt =∑得 222211*********(22)2d Q r Q r Pr P r Pr g dtω+++=+11Pr 又 d dt ωε= 则有 11222222112211222()22Pr P r g Q r Q r Pr P r ε-=⋅+++答案:()12112222221122122d d 22Pr -P r g t Q r +Q r +Pr +P r ω=。
3-2 如图所示,两根等长等重的均匀细杆AC 和BC ,在C 点用光滑铰链连接,铅直放在光滑水平面上,设两杆由初速度为零开始运动。
试求C 点着地时的速度。
解: 系统在水平方向上受力为零,角动量守恒有2211222h mv m ω+⨯2(I )=2g其中 002/2vv l l ω==0v 为C 点着地时A 点速度002c v v v ===答案:c v =3-3 半径为a ,质量为M 的薄圆片,绕垂直于圆片并通过圆心的竖直轴以匀角速度ω转动,求绕此轴的角动量。
3-2题图3-1题图解 由题意作图 如图所示由某一质点组对某个固定轴的动量矩1ni i i i J r m v==⨯∑20adm rd dr rdr d πρθρθ==⎰⎰其中2Ma ρπ=故 223001()2a J r dmv d r dr Ma πθρωω=⨯==⎰⎰⎰⎰答案:212J Ma ω=3-4 一半径为r ,重量为P 的水平台,以初角速度0ω绕一通过中心o 的铅直轴旋转;一重量为Q 的人A 沿半径B o 行走,在开始时,A 在平台中心。
理论力学第三章习题解答.ppt

量出FR的长度为161N 和水平方向的夹角为
FR FR2x FR2y 802 1402 161.2N
和水平方向(x轴)的夹角的余弦为
其余弦值为0.496
cos(FR,i ) Fx / FR 80 /161.2=0.496
2-3
解:
因为滑轮的大小忽略不计,且容易看出 AB和BC杆均为二力杆,容易得到B点的 受力如图所示:
Fx 0 FAx 0
FAy FB
Fy 0 FAy FB F 0
MA 0 FB 2a M F 3a 0
解得:
FAx 0
FAy
M Fa 2a
FB
M
3Fa 2a
3-6 (b)解:
AB杆的受力如图所示 显然,AB杆受一平面任意力
FAx
FAy
系作用,有平衡方程
Fx 0 FAx 0
FAx
FAy
系作用,有平衡方程
FB
Fx 0 FAx 0 Fy 0 FAy FB P1 P2 P 0
MA 0 FB (l1 l2) P1(l1 a) P2(l1 b) P(l1 l) 0
代入数值,解得:
FAx 0
FAy 33.23kN
FB 96.77kN
3-7
当成一整体,其受力如图所示
列平衡方程,有
FAx
FAy
Fx 0 FAx FT FBC cos 0
Fy 0 FAy FBC sin W 0
MB 0 FT r W(BD r) FAy (AD DB) 0
又因为 FT W
代入数值,解得
FAx 2400N FAy 1200N FBC 848.53N
A
x F1
FBD
B
60o
理论力学第三版课后答案第3章
r 由式(1)在 τ 向的坐标式,可得点 B 的速度 r τ : vB = vO + rω = 2rω
aw .
re vω B r vO
r n
(1)
co
τ
r
m
固定圆弧纯滚动由点 O′ 到点O,有 AD = AD′ ,即 r (φ + θ ) = Rθ ,得 rφ = (R − r )θ ,两边对时
∩
∩
题解 3-3Ca
课
r 平动参考基 e s 。 由图可知, 当连杆 B3 转过角 φ 3 ,齿轮 B2 转过角ψ 2 。
后 答
r r 基为动基 e 3 ,齿轮 B2 的连体基为动基 e 2 。过O2建立一
r x3
r x2
r y3
O1
r xs
根据啮合条件有 ψ 2 R2 = φ3 R1 。由图可知,齿轮 B2 的相
φ3
r x
得
q1 = (x A
课
y A = l sin (α − φ1 ) + l cos α sin φ1 = l sin α cos φ1 r1 连体基 e 的位形坐标阵为 y A φ1 ) = (l cos α cos φ1 l sin α cos φ1 φ1 )
T T
x A = l cos α cos φ1
r (2)对于公共基 e ,以三个连体基分别写出刚
r r r
B
r x1
α
r x2 r x3
r y3
C
体的位形坐标阵。 解:
r x
r 基 e 1 的位形为
r (1)如图 3-2Ca 所示,连体基 e 2 相对于与连体
T ρ1 0 ) , θ 2 = 2π − α B = (− l cos α
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章习题( 3.1;3.6;3.7;3.9;3.10;3.12;3.13;3.20;3.21,3.22)3.1 半径为r 的光滑半球形碗,固定在水平面上。
一均质棒斜靠在碗缘,一端在碗内,一端则在碗外,在碗内的长度为c ,试证棒的全长为()cr c 2224-3.1解 如题3.1.1图。
图题1.3.1均质棒受到碗的弹力分别为1N ,,2N 棒自身重力为G 。
棒与水平方向的夹角为θ。
设棒的长度为l 。
由于棒处于平衡状态,所以棒沿x 轴和y 轴的和外力为零。
沿过A 点且与z 轴平行的合力矩为0。
即:0sin 2cos 21=-=∑θθN N F x① 0cos 2sin 21=-+=∑G N N F yθθ②0cos 22=-=∑θlG c N M i ③由①②③式得:()θθ22cos 1cos 22-=c l ④ 又由于,cos 2c r =θ即rc 2cos =θ⑤将⑤代入④得:()cr c l 2224-=3.6把分子看作相互间距离不变的质点组,试决定以下两种情况下分子的中心主转动惯量:()a 二原子分子。
它们的质量是1m ,2m ,距离是l 。
()b 形状为等腰三角形的三原子分子,三角形的高是h ,底边的长度为a 。
底边上两个原子的质量为1m ,顶点上的为2m 。
∙Cx yha1m 2m 1m 第3.6(b)题图3.6解 (a )取二原子的连线为x 轴,而y 轴与z 轴通过质心。
O 为质心,则Ox ,Oy ,Oz 轴即为中心惯量主轴。
设1m 、2m 的坐标为()()0,0,,0,0,21l l ,因为O 为质心(如题3.6.2图)故02211=+l m l m ①且l l l =-12 ②由①②得21122121,m m lm l m m l m l +=+-=所以中心惯量主轴:()0221=+=∑i i i z y m I()22121222l m m m m x z m I i i i +=+=∑()22121223l m m m m y x m I i i i +=+=∑(b )如题3.6.3图所示,图题3.6.3该原子由A 、B 、D 三个原子构成。
C 为三个原子分子的质心。
由对称性可知,图中Cx 、Cy 、Cz 轴即为中心惯量主轴。
设A 、B 、D 三原子的坐标分别为()0,,0A y ,⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛-0,,2,0,,2D B y a y a 因为C 为分子的质心。
所以DB A DD B B A A C m m m y m y m y m y ++++==0112112=++++m m m y m y m y m DB A ①又由于DB y y =②h y y B A =-③由①②③得:2122112.22m m h m y y m m h m y D B A +-==+=故该分子的中心主转动惯量()()D B A i h m m m m z y m I i i i ,,2222121221=+=+=∑()()D B A i am x z m I i i i ,,221222==+=∑()()D B A i am h m m m m y x m I i i i ,,2222122121223=++=+=∑3.7如椭球方程为1222222=++c z b y a x 试求此椭球绕其三个中心主轴转动时的中心主转动惯量。
设此椭球的质量为m ,并且密度ρ是常数。
3.7解 如题3.7.1图所示。
沿y 轴平行于Oxy 平切椭球得切面为一椭圆,则该椭圆方程为:11122222222=⎪⎪⎭⎫ ⎝⎛-+⎪⎪⎭⎫ ⎝⎛-b y c z b y a x可求该切面的面积()⎪⎪⎭⎫ ⎝⎛-=221b y ac S y π 故积分()c ab dy b y ac y dy S y dm y bb bb y 3222221541πρρπρ=⎪⎪⎭⎫ ⎝⎛-=⋅=⎰⎰⎰-- 同理可求,15432bc a dm x πρ=⎰32154abcdm z πρ=⎰故中心主转动惯量:()()22221154c b abc dm z y I +=+=⎰πρ()()22222154c a abc dm z x I +=+=⎰πρ()()22223154b a abc dm y x I +=+=⎰πρ又由于椭球体积()abc dy b y ac dy S V bb bb y ππ34122=⎪⎪⎭⎫ ⎝⎛-==⎰⎰-- 故abcmV m πρ43==将ρ代入321,,I I I 得:()22151c b m I +=()22251c a m I += ()22351b a m I +=3.9立方体绕其对角线转动时的回转半径为23d k =试证明之。
式中d 为对角线的长度。
3.9解 如题3.9.1图所示Oxyz 坐标系。
图题1.9.3O 为正方体中心。
Ox 、Oy 、Oz 分别与正方体的边平行。
由对称性可知,Ox 、Oy 、Oz 轴就是正方体的中心惯量主轴。
设正方体的边长为a 。
设为平行于轴的一小方条的体积,则正方体绕轴的转动惯量()22222226am dydz z y a I a a a a xx =+=⎰⎰--ρ根据对称性得26a m I I I xxzz yy === 易求正方体的对角线与Ox 、Oy 、Oz 轴的夹角都为θ。
且31cos =θ故正方体绕对角线的转动惯量22226cos cos cos am I I I I zz yy xx ====θθθ①又由于ad 3=②绕对角线的回转半径mI k =③由①②③得23d k =3.10一均质圆盘,半径为a ,放在粗糙水平桌上,绕通过其中心的竖直轴转动,开始时的角速度为0ω。
已知圆盘与桌面的摩擦系数为μ,问经过多少时间后盘将静止?3.10解 如题3.10.1图。
图题1.3.10z 轴过O 点垂直纸面向外。
均质圆盘的密度为ρ。
设盘沿顺时针转动,则沿z 的方向有z zM dtdI = 即z z M I =ω① I 为转盘绕z 轴的转动惯量:221ma I =(m 为盘的质量), ωω-=z ②(ω为盘转动的角频率,负号因为规定顺时针转动)320232a g dr d r g M az ρμπθρμπ==⎰⎰=()232a m ma g πρρμ=③由①②③得ag 34μω-= 又因为(),00ωω=故()tag t 340μωω-=所以(),0=t ω得ga t μω430=3.12矩形均质薄片ABCD ,边长为a 与b ,重为mg ,绕竖直轴AB 以初角速0ω转动。
此时薄片的每一部分均受到空气的阻力,其方向垂直与薄片的平面,其量值与面积及速度平方成正比,比例系数为k 。
问经过多少时间后,薄片的角速减为初角速的一半?CDb第3.12题图3.12解 如题3.12.1图,第3.12.1图坐标Oxyz 与薄片固连,则沿z 轴方向有: ① 且现取如图阴影部分的小区域 ,该区域受到的阻力df 对z 轴的力矩所以zz dJ M dt=z zM I ω=22d d d ()z f k sv kb y y ω==23d d d z z M f y kb y yω=-⋅=-d d s b y=②又薄片对轴的转动惯量()ab m ma bdy y dm y I aaρρ====⎰⎰202231③由①②③得:()21431ωω+=t m b ka t z当()2ωω=t z 时,234ωb ka mt =3.13一段半径R 为已知的均质圆弧,绕通过弧线垂直的轴线摆动。
求其作微振动时的周期。
3.13解 如题3.13.1图所示,图题1.3.13坐标系Oxyz 的原点位于圆弧最顶点。
设圆弧平衡时,质心c 的坐标为()0,,0l c -。
如图所示圆弧偏离平衡位置一小角度θ,则θ满足微分方程θθ I mgl =-sin I 为圆弧相对于Oz 轴的转动惯量。
当θ很小时,θθ≈sin ,代入上式得:0=+θθImgl ①圆弧上对应转角为θ的一小段圆弧的坐标为()0,cos ,sin R R R -θθ质心c 的纵坐标()R R Rd R R R d y csin cos 0θθθρθθρθθθθ+-=-=⎰⎰--上式中ρ为圆弧的线密度R R l 0sin θθ-= ②又()()[]θθθρθθd R R R R I ⎰-+-=022sin cos ⎪⎪⎭⎫ ⎝⎛-=002sin 12θθmR ③其中02θρR m =,将②③代入①得02=+θθRg ④解④式得通解()⎪⎪⎭⎫⎝⎛+=ϕθt R g A t 2cos 微振动周期g R RgT 2222ππ==3.20质量为M 半径为r 的均质圆柱体放在粗糙水平面上。
柱的外面绕有轻绳,绳子跨过一个很轻的滑轮,并悬挂一质量为m 的物体。
设圆柱体只滚不滑,并且圆柱体与滑轮间的绳子是水平的。
求圆柱体质心的加速度1a ,物体的加速度2a 及绳中张力T 。
m第3.20题图3.20解 如题3.20.1图,题3.20.1图'm设圆柱体的转动角速度为k ωω-=,设它受到地面的摩擦力为f ,由动量定理和动量矩定理知:1a M x M f T F c x ∑==+= ① ∑-=+-=ω 221Mr fr Tr M z②对于滑块。
由动量定理知:③又无滑滚动条件:ωr xc =两边对时间求导:ω r xa c ==1④ 以C 为基点:r a a Ax ω+=1 假设绳不可拉伸。
则2a a Ax =。
故r a a ω+=12⑤ 由①②③④⑤解得:mM mMgT m M mg a m M mg a 833,838,83421+=+=+=3.21一飞轮有一半径为r 的杆轴。
飞轮及杆轴对于转动轴的总转动惯量为I 。
在杆轴上绕有细而轻的绳子,绳子的另一端挂一质量为m 的重物。
如飞轮受到阻尼力矩G 的作用,求飞轮的角加速度。
若飞轮转过θ角后,绳子与杆轴脱离,并再转过ϕ角后,飞轮停止转动,求飞轮所受到的阻尼力矩的量值。
第3.21题图2y FT mg myma =-==-∑3.21解 (1)如题3.21.1图。
题3.21.1图设z 轴过O 点垂直纸面向外。
绳子上的弹力为T 。
对于飞轮,根据动量矩定理,在z 轴方向:∑=-=ωI G Tr Mz① maT mg =-②a 为物块下落的加速度。
因为物块的加速度应与A 点加速度一样大小,故r a ω= ③由①②③解得:2mrI Gmgr +-=ω(2)假若飞轮受到的阻尼力矩为G 的话,由(1)问知,飞轮的角加速度2mrI Gmgr +-=ω 。
现在来求绳子脱落以后飞轮的角加速度ω' 。
同样根据动量矩,在z轴方向:IG G I -='-='ωω可以证明:类似于位移、加速度、初速度和末速度之间的关系式as v v t2202=-。