全国青少年机器人技术等级考试二级模拟试题
全国青少年机器人技术等级考试二级理论模拟题(B)卷(直接打印)

全国青少年机器人技术等级考试二级理论模拟题(B)卷(直接打印)--全国青少年机器人等级考试二级理论考试( B 卷)(满分 100 分)一、单选题(每题 2 分,共 30 题)1.下列人物中,哪位发现了电流?()A. 富兰克林B. 伽利略C. 牛顿D. 喜羊羊2.首届机器人世界杯在哪年举办?()A. 1992B. 1995C. 1997D. 19993.关于机器人比赛,以下说法正确的是?()A. 有时需要人为干预。
B. 有时不需要人干预。
C. 有时需要两个机器人配合。
D. 以上说法都正确。
4.下面说法正确的是?()A.力是改变物体运动状态的原因。
B.力是维持物体平衡状态的原因。
C.力是改变物体位置的原因。
D.力是物体产生速度的原因。
5.我国最早的机器人是在什么时候?()A. 唐朝。
B. 内清朝后期。
C. 解放后。
D. 西周时期。
6.机器人手臂或手部安装点所能达到的所有空间区域称为?()A. 工作空间。
B. 最大空间。
C. 自由度。
D. 危险空间。
7.关于力和运动的关系,下列说法正确的是?()A.物体的速度不断增大,表示物体必定受力。
B.物体的位移不断增大,表示物体必定受力作用。
C.物体朝什么方向运动,则这个方向上物体必定受力。
D.物体的速度大小不变,则物体必定不受力作用。
8.1959 年,第一台工业机器人诞生于()。
A. 德国B. 美国C. 英国D. 日本9.关于机器人“恐怖谷理论”,下面说法正确的是?()A. 由美国机器人专家提出。
B. 人类不喜欢机器人。
C. 机器人不喜欢人类。
D.随着机器人的拟人程度增加,人类对它的好感度就会改变。
10.在凸轮机构中,按凸轮形状不同,()凸轮结构简单,应用最广泛,常用于行程较短的场合。
A. 盘形凸轮。
B. 移动凸轮。
C. 圆柱凸轮。
D. 圆锥凸轮。
1--。
全国青少年机器人技术等级考试二级模拟试题
全国青少年机器人技术等级考试二级模拟试题以下人物中,哪位创造了电灯?A.牛顿B.熊大C爱迪生D.爱因斯坦题型: 单项选择题答案:C分数:1首届机器人世界杯足球赛在哪里举办?A.日本B.荷兰C美国D.意大利题型: 单项选择题答案:A分数:1机器人控制系统从根本原理和系统结构上可以分成哪两类?A.非伺服型系统和伺服型系统。
B. Windows 系统和苹果系统。
C.非仿真型系统和非仿真型系统。
D.大系统和小系统。
题型: 单项选择题答案:A分数:1以下说法正确的选项是?A.凸轮机构一般有凸轮、从动件和机架三个构件组成。
B.凸轮机构一般有凸轮、主动从件和机架三个构件组成。
C.凸轮机构一般有凸轮、从动件和主动件三个构件组成。
D.凸轮机构一般有圆轮、从动件和主动件三个构件组成。
题型: 单项选择题答案:A 分数:1以下事物中,有曲柄装置的是?A.自行车B.自动晾衣架C.电视机D.以上都有题型: 单项选择题答案:A分数:1一个人在匀速直线行驶的火车里向上跳起,发现仍落回原地,这是因为?A.人跳起厚,车厢内空气推着他向前运动。
B.人跳起到落地时间过短,偏后的距离看不出来。
C.人跳起到落地,在水平方向上人与车有相同的速度。
D.人跳起瞬间,地板给人一个向前的力,推着他一起向前运动。
题型: 单项选择题答案:C分数:1在机器人历史上,被称为“工业机器人之父〞的是?A.阿西莫夫B.英格伯格C.诺伯特D.弗里茨题型: 单项选择题答案:B分数:1下面哪个不是机器人系统的根本结构?A.机械本体B.人C计算机控制系统D.传感系统题型: 单项选择题答案:B分数:1工业机器人出现是在〔〕世纪。
A.18B.19C.20D.21题型: 单项选择题答案:C分数:1〔〕决定了从动件预定的运动规律。
A.凸轮转速B.凸轮大小C.凸轮轮廓曲线D.凸轮形状题型 : 单项选择题答案 :C分数 :1一节普通干电池电压是多少伏?A. 0.8B. 1.0C. 1.5D. 2.0 题型: 单项选择题答案 :C分数 :1机器人三定律由谁提出? A.美国科幻家艾萨克 B.乔?B ?德沃尔 C 意大利作家卡洛 D.捷克剧作家卡尔 题型: 单项选择题 答案 :A分数 :1 以下用到凸轮结构的是?A.发动机B.跷跷板 C 显示器 D.拉杆箱 题型: 单项选择题答案 :A分数 :1机器人的英文单词是? A. BoterB. RebotC. RobotD. Botre 题型: 单项选择题答案 :C分数 :1 随着电子技术的开展,想实现机器人精密控制,对电机的要求是?A.体积大B.体积小、高速高精度C.价格昂贵D.没什么要求题型: 单项选择题答案 :B分数 :1以下做法正确的选项是??洛伦A.用湿手触摸电器。
全国青少年机器人技术等级考试二级模拟试题
全国青少年机器人技术等级考试二级模拟试题示例文章篇一:《有趣的机器人技术等级考试》嘿,同学们!你们知道全国青少年机器人技术等级考试吗?我跟你们说呀,这可太有意思啦!前几天,老师告诉我们要参加这个考试的模拟测试,我当时心里就像揣了只小兔子,怦怦直跳。
这会是啥样的考试呢?难不难呀?模拟考试那天,我早早来到了教室。
一进门,就看到好多小伙伴们都已经坐在那里,一个个表情严肃,好像要上战场一样。
我心里暗暗想:“大家都这么紧张,这考试肯定不简单!”老师开始发试卷了,我的手心里都出汗啦!拿到试卷一看,哇,好多题目都是关于机器人的搭建和编程的。
有一道题问:“如果要让机器人按照特定的路线行走,应该怎么编程?”这可把我难住了,我抓耳挠腮,脑袋里一片空白,就像有一团乱麻。
我忍不住小声嘀咕:“这可咋办呀?”我偷偷看了看旁边的小明,只见他眉头紧皱,咬着笔杆,一副苦思冥想的样子。
我心想:“难道他也不会?”于是我轻轻碰了碰他,小声问:“小明,这道题你会吗?”小明白了我一眼,没好气地说:“别打扰我,我正想呢!”哎呀,碰了一鼻子灰!再看看前面的小红,她倒是一脸淡定,不停地在试卷上写着答案。
我羡慕极了,心里想:“她怎么这么厉害呀?难道她是机器人小天才?”时间一分一秒地过去,我急得像热锅上的蚂蚁。
这时候,老师走过来,看到我着急的样子,轻声说:“别着急,慢慢想,你平时学得不错,要相信自己!”老师的话就像一阵春风,吹走了我心里的焦虑。
终于,考试结束了。
大家都松了一口气,开始七嘴八舌地讨论起来。
“哎呀,这次考试太难了!”小刚抱怨道。
“就是就是,我好多题都不会。
”小亮也跟着附和。
“我觉得还好啦,只要平时多练习,也没那么难。
”学习委员小芳自信地说。
我在心里默默地想:“这次考试虽然难,但是也让我发现了自己的不足。
我一定要更加努力学习,下次一定要考个好成绩!”同学们,你们说这全国青少年机器人技术等级考试是不是很有挑战性?难道我们会被这点困难吓倒吗?当然不会!我相信只要我们努力,就一定能在这个神奇的机器人世界里畅游!示例文章篇二:《参加全国青少年机器人技术等级考试二级模拟试题,我有话说!》嘿,小伙伴们!你们知道吗?最近我参加了全国青少年机器人技术等级考试二级的模拟试题,那可真是一次超级有趣又充满挑战的经历!那天,我早早地就来到了考试的地方,心里像揣了只小兔子似的,“砰砰”直跳。
全国青少年机器人技术等级考试二级考试题库与答案
全国青少年机器人技术等级考试二级考试题库与答案一、选择题1. 机器人技术属于哪一类技术?A. 计算机技术B. 自动化技术C. 电子技术D. 信息技术答案:B2. 以下哪个不是机器人技术的应用领域?A. 工业制造B. 医疗健康C. 农业生产D. 人工智能答案:D3. 机器人编程语言中,以下哪个是图形化编程语言?A. PythonB. C++C. LabVIEWD. Scratch答案:D二、填空题1. 机器人的三大基本组成部分是________、________和________。
答案:控制器、驱动器、传感器2. 以下属于伺服电机的是________、________和________。
答案:步进电机、伺服电机、舵机3. 机器人编程中,循环结构的关键字是________,条件结构的关键字是________。
答案:while,if三、判断题1. 机器人的驱动器可以分为电动驱动器、气动驱动器和液压驱动器三种类型。
()答案:正确2. 传感器是机器人的“眼睛”,用于获取外部环境信息。
()答案:正确3. 在机器人编程中,顺序结构、循环结构和条件结构是三种基本的结构。
()答案:正确四、简答题1. 请简述机器人的发展历程。
答案:机器人的发展历程可以分为四个阶段:第一阶段,诞生阶段,以1959年美国英格伯格和德沃尔制造的世界上第一台工业机器人为标志;第二阶段,技术积累阶段,20世纪70年代,机器人技术逐渐成熟;第三阶段,广泛应用阶段,20世纪80年代,机器人开始在各个领域得到广泛应用;第四阶段,智能化阶段,21世纪初,机器人技术向智能化方向发展。
2. 请简述机器人的主要应用领域。
答案:机器人的主要应用领域包括:工业制造、医疗健康、农业生产、航空航天、国防军事、服务机器人等。
3. 请简述机器人编程的基本步骤。
答案:机器人编程的基本步骤包括:分析问题、设计算法、编写程序、调试程序、优化程序。
五、编程题1. 编写一个程序,实现以下功能:当机器人传感器检测到前方有障碍物时,停止前进;当传感器检测到前方无障碍物时,继续前进。
全国青少年机器人技术等级考试二级试题(2022.12)

全国青少年机器人技术等级考试二级试题(2022.12)1.“机器人三原则”是由谁提出的?A.美国人艾萨克·阿西莫夫B.日本人森昌弘C.美国人乔治·德沃尔D.中国人苏颂2.张衡发明“记里鼓车”用来?A.计算车行驶路程B表演击打乐器C.运输军用物资D.指示方位3.智能机器人是第几代机器人?A.第一代B.第二代C.第三代D.第四代4.下图为飞机起飞时的机翼示意图,说法正确的是?A.整个机翼受到向下的力B.机翼上侧气流速度快C.机翼上侧所受的压力为0D.机翼下侧所受的压力为05.人体最大安全电压是?A.1.5VB.2VC.36VD.220V6.关于重力下列说法正确的是?A重力大小与物体的质量有关B.一个物体的重力与它的形状有关C.一个物体的重力与它的颜色有关D.一个物体在地球和月球的重力相等7.如图木块没有受到的力是?A.重力B.下滑力摩擦力CD.支持力8.如图向两张纸之间吹气,那么这两张纸如何变化?A.相互靠近B.相互远离C.不动D.任意摆动9.如图鞋底之所以有花纹是为了?A.增大鞋底与地面的摩擦力B.减小鞋底与地面的摩擦力c.更加美观D.使脚部舒适10.一个机器小车,用左右两个电机分别控制左右车轮左侧电机转速是100rpm,右侧电机转速是50rpm,则此机器人? ()A.向前直走B.向左前方转向C.向右前方转向D.原地不动11.关于前轮驱动小汽车说法错误的是?A.发动机一般放在小汽车前部B起步加速比后轮驱动小汽车更好c.因为传动轴短,效率比后轮驱动小汽车高12.D.前轮既要作为驱动轮,还要控制方向行走的机械腿一般采用的机构是?A.凸轮机构B.齿轮机构C.棘轮机构D.连杆机构13.如图该机构为?A.双曲柄机构B.曲柄滑块机构c.双摇杆机构D.棘轮机构14.如图该凸轮机构采用的锁合方式为?A.弹力锁合B.重力锁合C.几何锁合D.摩擦力锁合15.如图该机构为?A.双曲柄机构B.双摇杆机构C.曲柄滑块机构D.曲柄摇杆机构16.凸轮机构中通过弹董来锁合凸轮与从动件的方式叫做?()A.几何锁合B.弹力锁合c.拉力锁合D.重力锁合17.如图该机构为双动式单向棘轮机构,其中棘轮是?A.aB.bC.cD.d18.如图该机构为?A.摩擦式棘轮机构B单动式棘轮机构C.双动式棘轮机构D.外啮合棘轮机构19.在曲柄滑块机构中,滑块做什么动作?A.左右摇摆B绕固定点转动C.沿既定的轨道滑动D.无规律20.如图挖掘机的机械臂主要应用了什么机构?A.连杆机构B.凸轮机构棘轮机构D.槽轮机构21.下图中哪个是移动型凸轮机构?A.aB.bC.cD.d22.如图关于该机构说法正确的是?A.a是主动件B.这是不完全齿轮机构c.这槽轮机构D.这是全齿齿轮啮合的机构23.滑杆机构中回转体做什么动作?A.回转运动B.上下直动C.左右摇摆D.沿轨道滑动24.如图该机构动作时,a杆等速回转,b杆左右摇摆,则该机构是?()A.双曲柄机构B.曲柄摇杆机构曲柄滑块机构D.双摇杆机构25.如图该机构中主动摆杆是指?A.aB.bC.cD.d26.以下不属于滑杆机构的部件是?A.滑块和滑杆B.滑轮C.回转体D.机体27.以下适合远距离传动的机构为?A.平行啮合的齿轮B.垂直啮合的齿轮C.链传动机构D.蜗轮蜗杆机构28.如图下列哪个是该传动方式的特点?A.只能在同一平面内连接B.容易打滑C.适合远距离传动D.动力传递精准29.如图关于该机构说法正确的是?A.这是齿轮平行啮合B.这是链传动C.这是皮带传动D.a是主动件30.自行车主要采用了哪种传动方式?A.皮带平行传动B.链传动C.皮带交又传动D.皮带半交叉传动多选题31.产生滑动摩擦力的条件有哪些?A.物体之间相互接触B.物体之间不接触C.物体之间有相对运动的趋势,但没有相对运动D.物体之间有相对运动32.关于曲柄摇杆机构各部件说法正确的是?A.曲柄做回转运动B.连杆起连接作用C.摇杆左右摇摆D.基座固定不动33.如图关于该机构说法正确的是?Aa是主动件B.b是从动件C.a是从动件D.这是槽轮机构34.如图关于该传动方式说法正确的是?A.这是链传动B该传动方式无法精确传递动力C.这是皮带平行传动D.这是皮带交又传动35.下列会产生滑动摩擦力的是?A.小朋友推地面上的箱子,箱子没有动B.一个物体在斜面上下滑C.一个物体静止在斜面上D.车开的太快,踩刹车后,车又往前移动了一段距离判断题36.美国人约瑟夫·恩格尔伯格被誉为“机器人之父”()37.两个不接触的物体之间也有可能产生滑动摩擦力。
全国青少年机器人技术等级考试试卷(二级)模拟题

20180917全国青少年机器人技术等级考试试卷(二级)试卷编号:866111试卷录入者:机器人包老师试卷总分:100出卷时间:2018-12-25 13:17 答题时间:30分钟分数:100题数:45一、单选题(共30题,每题2分,共60分)1.链传动相比齿轮传动的优点是?[2分]A.更适合远距离传动B.轮转速更快C.动力更大D.链轮安装可以不在同一平面内2.诸葛亮发明了一种运送军粮的机器人称为?[2分]A.木牛流马B.指南车C.记里鼓车D.运粮车3.一辆六轮车,左侧三个轮转速100rpm,右侧三个轮转速200rpm则此车会?[2分]A.向前直走B.向前走并向左转C.向后退D.原地不动4.以下关于前轮驱动和后轮驱动说法正确的是?[2分]A.前轮驱动因省去了通往后轮的驱动轴和后差动器等零件,内部空间更大B.前轮驱动容易转向过度,后轮驱动转向不足C.前轮驱动零件更多,重量更大D.前轮驱动零件多成本更高5.关于电动机的能量转化说法正确的是?[2分]A.机械能转化为电能B.电能转化为机械能C.动能转化为势能D.势能转化为动能6.以下最适合制造公转自转模型的机械结构是?[2分]A.行星齿轮B.连杆C.曲柄摇杆D.曲柄滑块7.以下哪一项是皮带传动的优点?[2分]A.结构简单,适用于两轴中心距较大的传动场合B.使用寿命短C.传动效率慢D.传动平稳,噪声大8.关于皮带传动说法错误的是?[2分]A.皮带轮旋转方向可能相同B.皮带轮旋转方向一定相反C.皮带轮旋转方向可能相反D.交叉传动时,皮带轮旋转方向相反9.两个相互接触的物体,当其接触表面之间有相对滑动的趋势,但尚保持相对静止时,两者之间会产生?[2分]A.静摩擦力B.滚动摩擦力C.滑动摩擦力D.推动摩擦力10.下列情况产生静摩擦力的是?[2分]A.一个物体在地面上拖动,物体和地面之间的摩擦力B.车轮在地上滚动,车轮和地面之间的摩擦力C.静止在斜面上的物体,物体和斜面之间的摩擦力D.物体从斜面上下滑,物体和斜面之间的摩擦力11.关于飞机升降原理说法正确的是?[2分]A.机翼上方的曲线弧度大于下侧,起飞时上侧气流速度快B.机翼上方的曲线弧度大于下侧,起飞时上侧气流速度慢C.机翼上方的曲线弧度小于下侧,起飞时上侧气流速度快D.机翼上方的曲线弧度小于下侧,起飞时上侧气流速度慢12.在机器人史上,提出“机器人三定律”的是?[2分]A.英格伯特B.阿西莫夫C.马文明斯基D.弗利茨13.中国家用电压一般为?[2分]A.110VB.220VC.50VD.10V14.下列装置中,有曲柄机构的有?[2分]A.缝纫机B.电动机C.扫地机D.洗衣机参考答案:A15.下列哪位科学家发明了蒸汽机?[2分]A.瓦特B.牛顿C.爱因斯坦D.玻尔16.目前正在发展的智能机器人为第几代机器人?[2分]A.第一代机器人B.第二代机器人C.第三代机器人D.第四代机器人17.有的鱼线轮即使松开摇把,鱼线也不会被拉出,这是因为鱼线轮中有?[2分]A.棘轮机构B.凸轮机构C.曲柄机构D.连杆机构18.关于“恐怖谷理论”说法错误的是?[2分]A.提出者是日本的森昌弘B.是指机器人与人过于相似,人们会对之产生恐惧心理C.是指机器人本身会有害怕人类的心理活动D.恐怖谷理论产生于20世纪60年代19.为了减小摩擦力,一般会把摩擦力转化为()[2分]A.滑动摩擦B.滚动摩擦C.运动摩擦D.静摩擦20.下列哪个机构能够实现单向运动?[2分]A.凸轮B.棘轮C.曲柄滑块D.滑轮组二、多选题(共5题,每题4分,共20分)21.关于机器人的发展史说法正确的是?[4分]A.第一代机器人为示教再现型机器人B.第二代机器人为感知型机器人C.第三代机器人为智能型机器人D.第四代机器人为家用机器人22.两物体之间产生摩擦力必须具备哪些条件?[4分]A.两物体相互接触B.两物体有相对运动趋势或发生相对运动C.两物体需要有同一颜色D.两个物体大小需一致23.下列说法正确的是?[4分]A.面向地铁站立,如太靠近,地铁进站时会感觉到“吸力”,容易发生危险B.飞机机翼的外形设计使下侧气压大于上侧,所以能够上升C.风扇能降温是因为吹出的风一定是冷风D.我们用的瓶起子相当于费力杠杆24.下面哪种机构能实现间歇运动?[4分]A.槽轮机构B.棘轮机构C.链式传动机构D.不完全齿轮机构三、判断题(共10题,每题2分,共20分)25.凸轮机构一般由凸轮、从动件和机架三个构件组成。
2023年12月青少年机器人技术等级考试理论综合试卷二级真题及答案
2023年12月青少年机器人技术等级考试理论综合试卷二级真题(含答案)分数:100 题数:45一、单选题(共30题,共60分)。
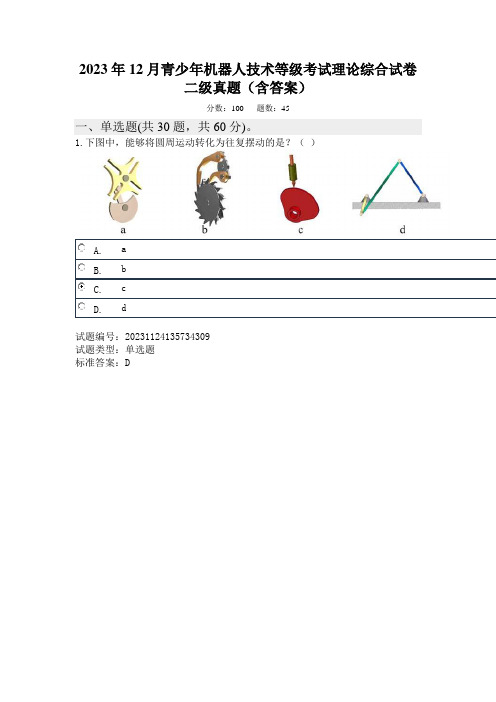
1.下图中,能够将圆周运动转化为往复摆动的是?()A. aB. bC. cD. d试题编号:20231124135734309试题类型:单选题标准答案:D2.如图,该机械结构可实现的运动方式为?()A. 往复摆动B. 单向持续转动C. 单向间歇性运动D. 双向持续转动试题编号:20231124135735913试题类型:单选题标准答案:C试题编号:20231124135707188试题类型:单选题标准答案:C4.下列选项使用了摆动型从动件的是?()A. aB. bC. cD. d试题编号:20231124135732718试题类型:单选题标准答案:D试题编号:20231124135700374试题类型:单选题标准答案:C6.如图,关于该机构说法正确的是?()A. 这是反向双曲柄机构B. a和b的旋转方向相同C. 这是棘轮机构D. 这是滑杆机构试题编号:20231124135718301试题类型:单选题标准答案:A7.如图,关于该机构说法正确的是?()A. 属于外啮合棘轮试题编号:20231124135736119 试题类型:单选题标准答案:D试题编号:20231124135716167 试题类型:单选题标准答案:C试题编号:20231124135718883 试题类型:单选题标准答案:D试题编号:20231124135728165 试题类型:单选题标准答案:D11.如图,该机构为?()A. 曲柄滑块机构B. 滑杆机构C. 曲柄摇杆D. 双摇杆机构试题编号:20231124135719048 试题类型:单选题标准答案:A试题编号:20231124135736460 试题类型:单选题标准答案:A13.该机构属于哪种棘轮机构?()A. 摩擦式棘轮机构B. 外啮合棘轮机构C. 内啮合棘轮机构D. 双动式棘轮机构试题编号:20231124135734434试题类型:单选题标准答案:C试题编号:20231124135731146试题类型:单选题标准答案:C15.如图,向两张纸中间吹风,说法正确的是?()A. 两张纸向外分离B. 两张纸向中间并拢C. 两张纸静止不动D. 两张纸都左右摆动试题编号:20231124135700546试题类型:单选题标准答案:B试题编号:20231124135733919试题类型:单选题标准答案:C试题编号:20231124135738664 试题类型:单选题标准答案:A试题编号:20231124135717035 试题类型:单选题标准答案:D试题编号:20231124135715556 试题类型:单选题标准答案:D试题编号:202311241357315746 试题类型:单选题标准答案:A试题编号:20231124135727106 试题类型:单选题标准答案:D试题编号:20231124135718751 试题类型:单选题标准答案:B试题编号:20231124135707592 试题类型:单选题标准答案:C试题编号:20231124135736303 试题类型:单选题标准答案:D25.下图中哪个是皮带交叉传动?()A. aB. bC. cD. d试题编号:20231124135733155试题类型:单选题标准答案:C试题编号:20231124135701537 试题类型:单选题标准答案:A试题编号:20231124135747750 试题类型:单选题标准答案:B试题编号:20231124135716378 试题类型:单选题标准答案:A试题编号:20231124135716056 试题类型:单选题标准答案:C试题编号:20231124135700954试题类型:单选题标准答案:D二、多选题(共5题,共20分)试题编号:20231124135718551试题类型:多选题标准答案:A|B|C|D试题编号:20231124135707662 试题类型:多选题标准答案:A|B|C试题编号:20231124135728480 试题类型:多选题标准答案:A|B|C34.下列图片是间歇运动机构的有哪些?()A. aB. bC. cD. d试题编号:20231124135715947试题类型:多选题标准答案:A|B|D35.如图,关于飞机机翼的截面图,说法正确的有哪些?()A. 机翼上侧气流速度快B. 机翼下侧气流速度快C. 机翼上侧气压低D. 机翼下侧气压低试题编号:20231124135700593试题类型:多选题标准答案:A|C三、判断题(共10题,共20分)试题编号:20231124135715994试题类型:判断题标准答案:正确试题编号:20231124135717441试题类型:判断题标准答案:错误试题编号:20231124135718723 试题类型:判断题标准答案:错误试题编号:20231124135706678 试题类型:判断题标准答案:错误试题编号:20231124135738789 试题类型:判断题标准答案:正确试题编号:20231124135735107 试题类型:判断题标准答案:正确试题编号:20231124135736322 试题类型:判断题标准答案:错误试题编号:20231124135716135 试题类型:判断题标准答案:正确试题编号:20231124135719490 试题类型:判断题标准答案:错误试题编号:20231124135706946 试题类型:判断题标准答案:正确。
全国青少年机器人技术等级考试试卷(二级)
精心整理
精心整理
全国青少年机器人技术等级
考试试卷(二级)
一、实操模型样例(70分)
评分标准:
(1) 模型框架(15分)
1.2.答案:(1)皮带传递动力:皮带可以远距离传递动力;在传递动力过程中会有能量的损失;齿轮相比传递动
力不够精准。
(5分)
(2)减速装置:电机上的小滑轮与轴上的大滑轮通过皮带连接构成了一个减速装置,减速装置可以获得更大的动力。
(5分)
(3)凸轮装置:由两个大齿轮和一个长螺丝构成了一个凸轮装置,它的作用是使得舂米机的舂头可以上下移动。
(10分)。
全国青少年机器人技术二级考试模拟卷2套(5-6)
全国青少年机器人技术二级考试模拟卷5号卷一、单选题(共30题,共60分)1.以下传动方式主动轮与从动轮转动方向不同的是?( )A.两齿轮平行啮合B.皮带开口传动C.链传动D.皮带平行传动2.( )发明了测量路程用的“计里鼓车”,每走1里,击鼓1次,每走10里击钟一次。
A.东汉张衡B.蜀国诸葛亮C.春秋墨子D.黄帝3.以下不是连杆机构特点的是?A.低副接触耐磨损B.设计比较复杂C.制造简单易于获得较高的制造精度D.可以实现复杂的运动规律4.两艘船近距离并排航行着,两船中间的水流速度高于外侧,以下说法正确的是?( )A.两艘船正常航行B.两艘船逐渐靠近C.两艘船逐渐远离D.无法判断5.水力发电机是将( )能转化为( )能。
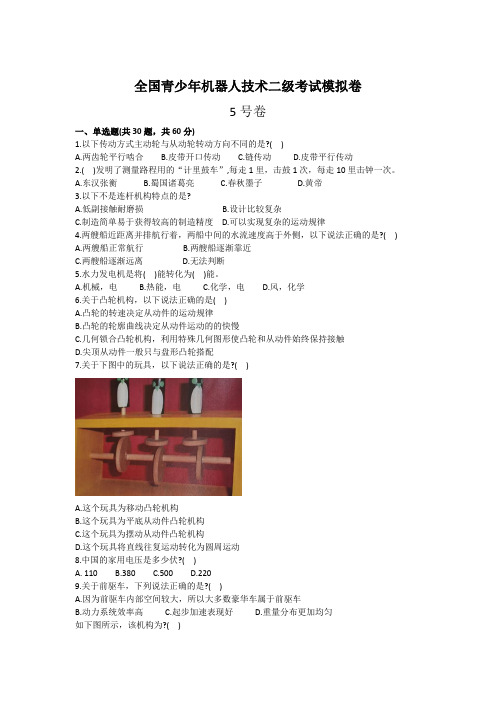
A.机械,电B.热能,电C.化学,电D.风,化学6.关于凸轮机构,以下说法正确的是( )A.凸轮的转速决定从动件的运动规律B.凸轮的轮廓曲线决定从动件运动的的快慢C.几何锁合凸轮机构,利用特殊几何图形使凸轮和从动件始终保持接触D.尖顶从动件一般只与盘形凸轮搭配7.关于下图中的玩具,以下说法正确的是?( )A.这个玩具为移动凸轮机构B.这个玩具为平底从动件凸轮机构C.这个玩具为摆动从动件凸轮机构D.这个玩具将直线往复运动转化为圆周运动8.中国的家用电压是多少伏?( )A. 110B.380C.500D.2209.关于前驱车,下列说法正确的是?( )A.因为前驱车内部空间较大,所以大多数豪华车属于前驱车B.动力系统效率高C.起步加速表现好D.重量分布更加均匀如下图所示,该机构为?( )A.单动式棘轮机构B.双动式棘轮机构C.双向式棘轮机构D.内啮合棘轮机构11.关于连杆机构,下列说法错误的是?( )A.汽车发动机含有连杆机构B.剪叉式升降机采用连杆机构C.挖掘机机械臂采用连杆机构D.骑自行车时大腿、小腿与自行车曲柄构成曲柄滑块机构12.关于曲柄摇杆及曲柄滑块,下列说法正确的是?( )A.曲柄滑块机构只由曲柄及滑块两部分组成B.曲柄滑块机构只能将直线往复运动转化为圆周运动C.曲柄摇杆机构与曲柄滑块机构都包含连杆机构D.曲柄摇杆机构只能将圆周运动转化为往复摆动18.静止在水平地面上的一台汽车,轮胎与地面产先种( )A.静摩擦力B.滚动摩擦力C.滑动摩擦力D.不产生摩擦力14.、下列是选项中,不属于间歇运动机构的是?( )A.槽轮机构B.凸轮机构C.棘轮机构D.齿轮机构15.以下不是皮带传动缺点的是?( )A.传递动力有延迟B.无法精确传递动力C.不适合远距离传动D.皮带速度过大或者突然加速会导致皮带断裂或打滑16.感知型机器属于第几代机器人?( )A.第一代B.第二代C.第三代D.第四代17.平面连杆机构构件之间的运动副是下列哪一种?( )A.高副B.低副C.中副D.无法判断18.如下图所示,该机构为?( )A.双动式棘轮机构B.摩擦式棘轮机构C.滑轮D.凸轮机构19.关于“伯努利效应”,下列说法不正确的具。
全国青少年机器人技术等级考试-二级理论模拟题(A卷)

全国青少年机器人技术等级考试-二级理论模拟题(A卷)着他一起向前运动。
1.( B )被称为“工业机器人之父”。
A. 阿西莫夫B. 英格伯格C. 诺伯特D. 弗里茨2.下面哪个不是机器人系统的基本结构?(B)(基本结构有:机械本体、驱动伺服单元、计算机控制系统、传感器系统、输出输出系统接口)A. 机械本体。
B. 人。
C. 计算机控制系统。
D. 传感系统。
3.工业机器人出现是在(C)世纪。
A. 18B. 19C. 20D. 214.( C )决定了从动件预定的运动规律。
A. 凸轮转速。
B. 凸轮大小。
C. 凸轮轮廓曲线。
D. 凸轮形状。
5.一节普通干电池电压是多少伏?(C. 1.5V)A. 0.8B. 1.0C. 1.5D. 2.06.机器人三定律由谁提出?(美国科幻作家艾萨克•阿西莫夫)A. 美国科幻家艾萨克•阿西莫夫。
(在《环舞》短篇小说中提出机器人三定律)B. 乔治•德沃尔。
(工业机器人先驱,创造世界第一台可编程机器人--尤尼梅特)C. 意大利作家卡洛•洛伦齐尼。
(写出《匹诺曹》)D. 捷克剧作家卡尔•恰佩克。
(在戏剧创造出“机器人”一词)7.下列哪个用到凸轮结构?(A)A. 发动机。
B. 跷跷板。
C. 显示器。
D. 拉杆箱。
8.机器人的英文单词是?(C)A. BoterB. RebotC. RobotD. Botre9.中国在哪年首次举办机器人世界杯?(2008年6月)A. 1999B. 2004C. 2006D.200810.随着电子电力的发展,机器人也越来越多样化,想实现机器人精密控制,对电机的要求有。
(B)A. 体积大。
B. 体积小、高速高精度。
C. 价格昂贵。
D. 没什么要求。
11.下列做法正确的是?(B)A. 用湿手触摸电器。
B. 家用通电电线有裸露的线头,不能用手碰。
C. 用湿布擦拭电器。
D. 发现漏电后立即拿水泼。
12.1831年,谁发现了电磁感应原理,奠定了发电机的理论基础。
全国青少年机器人技术等级考试试卷(二级)

全国青少年机器人技术等级考试试卷(二级)1. 1. 以下哪项是平底从动件凸轮机构特征? *A. 凸轮只能是外凸的B. 凸轮只能是内凹的C. 凸轮的形状没有限制(正确答案)D. 凸轮必须是圆柱凸轮2. 2. 飞机可以飞上天空主要是因为? [单选题] *A. 起飞时机翼下方气压比上方气压大(正确答案)B. 起飞时机翼上方气压比下方气压大C. 飞机外形像鸟D. 飞机机身不重3. 3. 以下关于皮带交叉传动说法正确的是? [单选题] *A. 两带轮转向相同B. 两带轮转向相反(正确答案)C. 带轮转向关系不能确定D. 是指带轮旋转中心轴交叉4. 4. 中国家用电压为? [单选题] *A.22VB.50VC.110VD.220V(正确答案)5. 5. 我们在用鱼线轮回收鱼线时,松开手鱼线也不会被拉出,是因为? [单选题] *A. 鱼线被卡死了,不能动B. 因为水里的鱼也不动C. 鱼线用完了D. 线轮上有棘轮,阻止了一个方向的转动(正确答案)6. 6. 机械尺蠖只能往前走不能后退,是因为它安装了()。
[单选题] *A. 棘轮机构(正确答案)B.凸轮机构C. 槽轮机构D. 滑轮7. 7. 如图,关于该机构说法正确的是? [单选题] *A. 它是外啮合棘轮机构B. 棘爪在棘轮的外侧C. 它是内啮合棘轮机构(正确答案)D. 它是齿式棘轮机构8. 8. 如图,像两张纸中间吹起,两张纸会怎么变化?[单选题] *A. 两张纸相互分离B. 两张纸相互吸引(正确答案)C. 没有变化D. 纸张颜色变化9. 9. 诸葛亮制造的木牛流马的作用是? [单选题] *A. 灌溉农田B. 运动军粮(正确答案)C. 测量行驶距离D. 观测天象10. 10. 汽车车轮上都有很深的花纹主要目的是? [单选题] *A. 美观B. 行驶时增大与地面的摩擦力(正确答案)C. 提高速度D. 能够减小车轮重量11. 11. 关于差速运动控制说法正确的是? [单选题] *A. 是我们用来调整机器人转向的常用方法(正确答案)B. 只能适用于机械小车C. 是指机器人两侧“脚”的运动快慢一样的时候,他可以转向D. 机器人“左脚电机”转速比“右脚电机”快时,机器人会原地不动。
最新全国青少年机器人技术等级考试-二级理论模拟题(A卷)
最新全国青少年机器人技术等级考试-二级理论模拟题(A卷)最新全国青少年机器人技术等级考试-二级理论模拟题(A卷)机器人二级理论考试模拟题(A卷)(满分100分)一、单选题(每题2分,共30题)1.下列人物中,哪位发明了电灯?(C.爱迪生)A. 牛顿B. 熊大C. 爱迪生D. 爱因斯坦2.首届机器人世界杯在哪举办?(日本名古屋)A. 法国B. 日本C. 美国D. 英国3.机器人控制系统从基本原理和系统结构上可以分成哪两类?(A)A. 非伺服型系统和伺服型系统。
B. Windows系统和苹果系统。
C. 仿真型系统和非仿真型系统。
D. 大系统和小系统。
4.下列说法正确的是?(A)A. 凸轮机构一般有凸轮、从动件和机架三个构件组成。
B. 凸轮机构一般有凸轮、主动从件和机架三个构件组成。
C. 凸轮机构一般有凸轮、从动件和主动件三个构件组成。
D. 凸轮机构一般有圆轮、从动件和主动件三个构件组成。
5.下列事物中,有曲柄装置的是(A)A. 自行车B. 自动晾衣架C. 电视机D. 以上都有6.火车在长直的轨道上匀速行驶,门窗紧闭的车厢内有一人向上跳起,发现仍落回原地,这是因为?(C)A. 人跳起厚,车厢内空气推着他向前运动。
B. 人跳起到落地时间过短,偏后的距离看不出来。
C. 人跳起到落地,在水平方向上人与车有相同的速度。
D. 人跳起瞬间,地板给人一个向前的力,推着他一起向前运动。
7.(B )被称为“工业机器人之父”。
A. 阿西莫夫B. 英格伯格C. 诺伯特D. 弗里茨8.下面哪个不是机器人系统的基本结构?(B)(基本结构有:机械本体、驱动伺服单元、计算机控制系统、传感器系统、输出输出系统接口)A. 机械本体。
B. 人。
C. 计算机控制系统。
D. 传感系统。
9.工业机器人出现是在(C)世纪。
A. 18B. 19C. 20D. 2110.(C )决定了从动件预定的运动规律。
A. 凸轮转速。
B. 凸轮大小。
C. 凸轮轮廓曲线。
最新全国青少年机器人技术等级考试-二级理论模拟题(B卷)

最新全国青少年机器人技术等级考试-二级理论模拟题(B卷)机器人二级理论考试模拟题(B卷)(满分100分)一、单选题(每题2分,共30题)1.下列人物中,哪位发现了电流?(A.富兰克林)A. 富兰克林B. 伽利略C. 牛顿D. 喜羊羊2.首届机器人世界杯在哪年举办?(1997年8月)A. 1992B. 1995C. 1997D. 19993.关于机器人比赛,以下说法正确的是?(D)A. 有时需要人为干预。
B. 有时不需要人干预。
C. 有时需要两个机器人配合。
D. 以上说法都正确。
4.下面说法正确的是?(A)A.力是改变物体运动状态的原因。
B.力是维持物体平衡状态的原因。
C.力是改变物体位置的原因。
D.力是物体产生速度的原因。
5.我国最早的机器人是在什么时候?(D.西周时期)A. 唐朝。
B. 内清朝后期。
C. 解放后。
D. 西周时期。
6.机器人手臂或手部安装点所能达到的所有空间区域称为?(A)A. 工作空间。
B. 最大空间。
C. 自由度。
D. 危险空间。
7.关于力和运动的关系,下列说法正确的是?(A)A. 物体的速度不断增大,表示物体必定受力。
B. 物体的位移不断增大,表示物体必定受力作用。
C. 物体朝什么方向运动,则这个方向上物体必定受力。
D. 物体的速度大小不变,则物体必定不受力作用。
8.1959年,第一台工业机器人诞生于(B.美国)。
A. 德国B. 美国C. 英国D. 日本9.关于机器人“恐怖谷理论”,下面说法正确的是?(D)A. 由美国机器人专家提出。
B. 人类不喜欢机器人。
C. 机器人不喜欢人类。
D. 随着机器人的拟人程度增加,人类对它的好感度就会改变。
10.在凸轮机构中,按凸轮形状不同,(A)凸轮结构简单,应用最广泛,常用于行程较短的场合。
A. 盘形凸轮。
B. 移动凸轮。
C. 圆柱凸轮。
D. 圆锥凸轮。
11.在两张纸之间吹气,如图所示,会有怎样的效果?(B)A. 无任何反应。
B. 两张纸往里合。
2023年3月青少年机器人技术等级考试理论综合试卷二级真题(含答案)
2023年3月青少年机器人技术等级考试理论综合试卷二级真题(含答案)分数:100 题数:45一、单选题(共30题,共60分)。
1.关于后轮驱动车说法正确的是?()A.发动机放在车的后部B.起步加速比前轮驱动车更好C.传动效率比前轮驱动车高D.与前轮驱动车比转向不足标准答案:B。
2.下图中哪个是反向双曲柄机构?()A.aB.bC.cD.d标准答案:C。
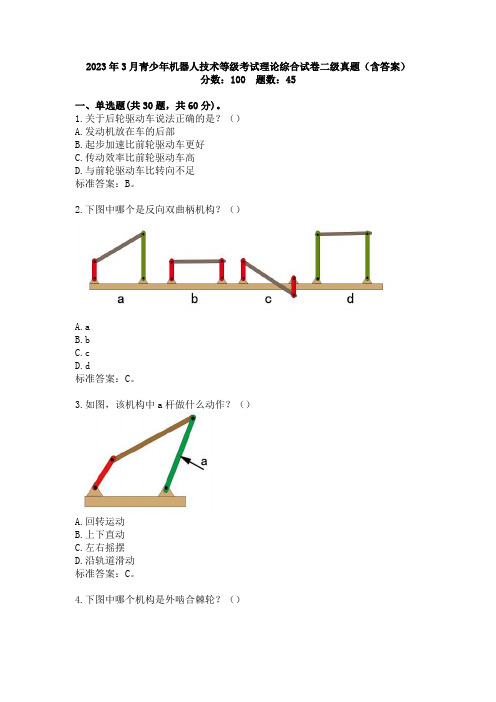
3.如图,该机构中a杆做什么动作?()A.回转运动B.上下直动C.左右摇摆D.沿轨道滑动标准答案:C。
4.下图中哪个机构是外啮合棘轮?()A.aB.bC.cD.d标准答案:B。
5.“木牛流马”是谁发明的?()A.张衡B.祖冲之C.诸葛亮D.曹雪芹标准答案:C。
6.下图中哪个机构采用了平底从动件?()A.aB.bC.cD.d标准答案:C。
7.放置在同一水平地面上的下列常见物品,重力最大的是?()A.一粒芝麻B.一个苹果C.一个西瓜D.一块橡皮标准答案:C。
8.下列属于棘轮机构的零件是?()A.凸轮B.主动棘爪C.带槽的部件D.带圆销的部件标准答案:B。
9.关于蜗轮蜗杆机构说法正确的是?()A.容易打滑B.传动比无法计算C.适合远距离传动D.蜗杆是主动件标准答案:D。
10.下图中哪个凸轮机构用了摆动型从动件?()A.aB.bC.cD.d标准答案:D。
11.如图该机构运转时回转体的动作是?()A.在轨道内滑动B.来回摇摆C.等速回转D.静止不动标准答案:C。
12.下图为飞机准备起飞时的机翼示意图,说法正确的是?()A.机翼上侧曲线弧度小于下侧B.机翼上侧气流速度比下侧慢C.机翼上侧所受的气压为0D.机翼上侧所受的气压小于下侧标准答案:D。
13.下图中哪个是单动式棘轮机构?()A.aB.bC.cD.d标准答案:C。
14.如图,关于自行车说法错误的是?()A.a处采用三角形框架来增加结构稳定B.b处是轮轴的变形C.c处有花纹是为了减小与地面的摩擦D.d处采用了链传动标准答案:C。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全国青少年机器人技术等级考试二级模拟试题下列人物中,哪位发明了电灯?A.牛顿B.熊大C.爱迪生D.爱因斯坦题型:单选题答案:C分数:1首届机器人世界杯足球赛在哪里举办?A.日本B.荷兰C.美国D.意大利题型:单选题答案:A分数:1机器人控制系统从基本原理和系统结构上可以分成哪两类?A.非伺服型系统和伺服型系统。
B. Windows系统和苹果系统。
C.非仿真型系统和非仿真型系统。
D.大系统和小系统。
题型:单选题答案:A分数:1下列说法正确的是?A.凸轮机构一般有凸轮、从动件和机架三个构件组成。
B.凸轮机构一般有凸轮、主动从件和机架三个构件组成。
C.凸轮机构一般有凸轮、从动件和主动件三个构件组成。
D.凸轮机构一般有圆轮、从动件和主动件三个构件组成。
题型:单选题答案:A分数:1下列事物中,有曲柄装置的是?A.自行车B.自动晾衣架C.电视机D.以上都有题型:单选题答案:A分数:1一个人在匀速直线行驶的火车里向上跳起,发现仍落回原地,这是因为?A.人跳起厚,车厢内空气推着他向前运动。
B.人跳起到落地时间过短,偏后的距离看不出来。
C.人跳起到落地,在水平方向上人与车有相同的速度。
D.人跳起瞬间,地板给人一个向前的力,推着他一起向前运动。
题型:单选题答案:C分数:1在机器人历史上,被称为“工业机器人之父”的是?A.阿西莫夫B.英格伯格C.诺伯特D.弗里茨题型:单选题答案:B分数:1下面哪个不是机器人系统的基本结构?A.机械本体B.人C.计算机控制系统D.传感系统题型:单选题答案:B分数:1工业机器人出现是在()世纪。
A. 18B. 19C. 20D. 21题型:单选题答案:C分数:1()决定了从动件预定的运动规律。
A.凸轮转速B.凸轮大小C.凸轮轮廓曲线D.凸轮形状题型:单选题答案:C分数:1一节普通干电池电压是多少伏?A. 0.8B. 1.0C. 1.5D. 2.0题型:单选题答案:C分数:1机器人三定律由谁提出?A.美国科幻家艾萨克?阿西莫夫B.乔治?德沃尔C.意大利作家卡洛?洛伦齐尼D.捷克剧作家卡尔?恰佩克题型:单选题答案:A分数:1下列用到凸轮结构的是?A.发动机B.跷跷板C.显示器D.拉杆箱题型:单选题答案:A分数:1机器人的英文单词是?A. BoterB. RebotC. RobotD. Botre题型:单选题答案:C分数:1随着电子技术的发展,想实现机器人精密控制,对电机的要求是?A.体积大B.体积小、高速高精度C.价格昂贵D.没什么要求题型:单选题答案:B分数:1下列做法正确的是?A.用湿手触摸电器。
B.家用通电电线有裸露的线头,不能用手碰。
C.用湿布擦拭电器。
D.发现漏电后立即拿水泼。
题型:单选题答案:B分数:11831年,谁发现了电磁感应原理,奠定了发电机的理论基础。
A.爱迪生B.牛顿C.法拉第D.爱因斯坦题型:单选题答案:C分数:1成年人人体安全电压是多少伏?A. 12VB. 24VC. 36VD. 48V题型:单选题答案:C分数:1中国在什么时候开始对现代机器人开展研究?A. 20世纪60年代B. 20世纪70年代C. 20世纪80年代D. 20世纪90年代题型:单选题答案:B分数:1关于电流形成的说法,正确的是?A.电荷的运动形成了电流。
B.电荷的定向运动形成了电流。
C.电荷的杂乱无章运动形成了电流。
D.电荷静止不动形成了电流。
题型:单选题答案:B分数:1步行机器人的行走机构多为?A.连杆机构B.齿轮机构C.履带D.以上说法都不正确题型:单选题答案:A分数:11966年谢克机器人诞生,关于谢克机器人下面说法正确的是?A.是第一台潜水机器人。
B.是第一台飞行机器人。
C.是第一防水机器人。
D.是第一台移动机器人。
题型:单选题答案:D分数:1关于机器人“恐怖谷理论”,下面说法正确的是?A.由美国机器人专家提出。
B.人类不喜欢机器人。
C.机器人不喜欢人类。
D.随着机器人的拟人程度增加,人类对它的好感度就会改变。
题型:单选题答案:A分数:1我国最早的机器人出现在什么时候?A.唐朝B.清朝后期C.解放后D.西周时期题型:单选题答案:D分数:1机器人手臂或手部安装点所能达到的所有空间区域称为?A.工作空间B.最大空间C.自由度D.危险空间题型:单选题答案:A分数:1世界上第一台工业机器人诞生于:A.德国B.英国C.美国D.日本题型:单选题答案:C分数:1中国家用电压是多少伏?A. 110B. 150C. 200D. 220题型:单选题答案:D分数:1下列描述正确的是?A.同一种材质在不同的状态下可以是导体,也可以是绝缘体。
B.绝缘体在任何情况下都不可以转变为导体。
C.导体在任何情况下都不可以转变为绝缘体。
D.导体和绝缘体都是绝对的,不可转变。
题型:单选题答案:A分数:1我们能够在地面上行走是因为?A.因为我们穿了鞋。
B.因为我们与地面接触面存在摩擦力。
C.因为陆地不会动。
D.因为这是我们天生就有的能力。
题型:单选题答案:B分数:1机器人语言是由()表示的“0”和“1”组成的字串机器码。
A.二进制B.八进制C.十进制D.十六进制题型:单选题答案:A分数:1世界上第一台计算机由谁发明的?A.爱迪生B.牛顿C.冯诺依曼D.法拉第题型:单选题答案:C分数:1下列图片中,能够帮助我们完成家务的是哪个?A.B.C.D.题型:单选题答案:A分数:1机器人由哪些重要组成部分构成?A.输入设备B.输出设备C.主控制器D.以上都是题型:单选题答案:D分数:1下列描述错误的是A.机器人的输入设备是用来获取数据的B.机器人的主控是用来传递指令的C.机器人的输出设备是用来执行指令的D.输入设备、输出设备、主控制器对于机器人来说缺一不可题型:单选题答案:B分数:1下列选项中,使用了凸轮的是A.B.C.D.题型:单选题答案:C分数:1下列图片是棘轮的是:A.B.C.D.题型:单选题答案:A分数:1以下选项中运用了连杆结构的是A.雨刷器B.挖掘机C.椭圆规D.以上都是题型:单选题答案:D分数:1在我们做过山车时,为什么要系安全带A.因为在高速的曲线运动中,人体受到离心力的作用,会被甩出去B.怕快速运动,风太大把人吹下去C.为了能够把人固定在座椅上,坐的更舒服D.没用,只是为了装饰题型:单选题答案:A分数:1塔吊的吊钩上会有很多股绳子,以下说明正确的是A.使用定滑轮来拉起重物B.利用动滑轮来拉起重物C.利用动滑轮组,绳子往返越多,越省力D.利用更多的绳子可以吊起的距离越高题型:单选题答案:C分数:12015年,在中国哪个城市举办了世界机器人大会?A.上海B.广州C.深圳D.北京题型:单选题答案:D分数:1下面哪些是机器人三定律?A.机器人不得伤害人类,或坐视人类受到伤害。
B.除非违背第一法则,机器人必须服从人类的命令。
C.在不违背第一及第二法则下,机器人必须保护自己。
D.机器人可以偶尔伤害人类。
题型:多选题答案:ABC分数:2以下对于家用机器人描述正确的是A.主要用于服务人类B.能够解决生活问题C.具有大型化、复杂化D.可以与工业机器人通用题型:多选题答案:AB分数:2下列有关凸轮特点说法正确的是?A.凸轮的外廓形状取决于从动件的运动规律。
B.凸轮机构能高速启动,动作准确可靠。
C.凸轮机构属性低富接触,传动力不宜过大。
D.容易磨损,不能保持良好发润滑。
题型:多选题答案:ABD分数:2典型棘轮机构由哪些构件组成?A.棘轮B.摆杆C.止回棘爪D.驱动棘爪答案:ABCD分数:2下列图片中使用连杆机构的是A.B.C.D.答案:ABCD分数:2曲柄连杆机构主要由哪些组成?A.圆环组B.机体组C.活塞连杆组D.曲轴飞轮组题型:多选题答案:BCD分数:22004年初,美国两架火星探测车成功登录,包括下面哪个?A.神奇号B.机遇号C.勇气号D.好奇号题型:多选题答案:BC分数:2下列关于滑杆运动方式的说法正确的是?A.回转体作回转运动B.滑块从动C.滑杆绕固定轴转动D.滑杆翻转运动题型:多选题答案:ABC分数:2服务机器人主要从事工作有?A.清洁B.焊接C.监护D.保安题型:多选题答案:ACD分数:2凸轮一般按外形可为三类,主要有哪些?A.盘形凸轮B.移动凸轮C.椭圆凸轮D.圆柱凸轮题型:多选题答案:ABD分数:2现代机器人综合哪些学科的成果?A.微电子B.自动化控制C.机械学D.计算机题型:多选题答案:ABCD分数:2工业机器人具有哪些特点?A.对工作环境有很强适应能力,能代替人在有害场所从事危险工作。
B.动作准确性高,可保证产品质量的稳定性。
C.能高强度地在环境中从事单调重复的劳动。
D.具有很广泛的通用性。
题型:多选题答案:ABCD分数:2机器人的出现对于人类的意义是A.可以完全解放人类,从此不需要人类工作了。
B.机器人可以帮助我们完成一些危险的工作。
C.微型机器人在医学领域对人类的帮助很大。
D.大型工业机器人可以帮助人类完成很多沉重的工作。
题型:多选题答案:BCD分数:2以下使用了棘轮结构的是A.B.C.D.题型:多选题答案:AB分数:2以下那些属于电子组件?A.CPUB.轮子C.触碰传感器D.外壳题型:多选题答案:AC分数:2一只凸轮只有一种预定的运动规律。
题型:判断题答案:正确分数:2第十二届机器人世界杯在中国举办。
题型:判断题答案:正确分数:2机械手不能称为机器人。
题型:判断题答案:错误分数:2凸轮转速的高低,影响从动杆的运动规律。
题型:判断题答案:错误分数:2曲柄摇杆机构能使整周回转运动变为往复摆动,但不能把往复摆动变为整周回转运动。
题型:判断题答案:错误分数:2机器人一定是人型的。
题型:判断题答案:错误分数:2世界第一台可编程机器人叫“尤尼梅特”。
题型:判断题答案:正确分数:2古时候的花轿用到了滑杆原理。
题型:判断题答案:正确分数:2凸轮在机构中经常是主动件。
题型:判断题答案:正确分数:2棘轮机构按结构形式分类可分为齿式棘轮机构和摩擦式棘轮机构。
题型:判断题答案:正确分数:2自行车没有曲柄结构。
题型:判断题答案:错误分数:2凸轮机构和棘轮机构都不能实现间歇运动。
题型:判断题答案:错误分数:2一个物体,不受到任何外力,那么该物体一定是静止的。
题型:判断题答案:错误分数:2机器人的定义是“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统”()题型:判断题答案:正确分数:2机器人最常采用的基本传感器有视觉传感器、力觉传感器、触觉传感器、位移传感器、速度传感器、加速度传感器等。
题型:判断题答案:正确分数:2。