工业控制--串口通讯方法(精)
工业控制中上位机的串口通信设计与实现

【 y rssrac mmu iain, utt ra ig, Iu n to Ke wo d ] il o e nc to m l h e dn AP f cin i
前 言
本 文 中 使 用 的 W i o API 数 是 nd ws 函
B OOL S tp mm( eu Co HA F l. N DL E h i e
接 口 在 设 置 通 信 配 置 和 发 送 错 误 敏 感 、 无 时 间 限 制 的 数 据 时 尤 其 有 用 。 通 过 一 个 实 例 程 序 介 绍 串 口 通 信 程 序 的 编 制 方 法 。 这 个程 序用于调试 下位机 与上位机 的通讯 ,
可 以 根 据 不 同 的 下 位 机 设 置 和 不 同 的 通 信
DW ORD w0u Ou u //输 出 缓 冲 区 d t ee
的 大 小 ) ;
要写 的字节数 目
LP DW 0RD p I Numb Of e W rte / er Byts itn,
取 得 指 定 通 信 端 口的 当前 控 制 设 置 填 充 端 口 控 制 块
B00L Ge Co m S a e t m t t(
1 1 打开 和 配 置 串 口 .
/已 经 写 的 字 节 的数 目
LP 0VE RLAP E I Ov r a p d / P D p e lp e /指
向 一 个 0VERIAP D 结 构 , 异 步 读 取 时 PE 更 新 此 结 构 。; ) 它 的 返 回值 等 和 读 串 口 函数 相 同 。
协 议 对 下 位 机 进 行 实 时 检 测 , 把 采 集 的 数 据 显 示 出 来 ,送 出 测 试 信 号 。
一种面向工业控制的串口通信控制技术

・
1 ・ 4
梅 山科 技
20 0 6年 设备增 刊
一
种面向工业控制的串 口通信控制技术
董 刚 周 明 华 ( 山钢铁 公 司设备部 南 京 梅 2 03 ) 1 0 9
摘 要 : 绍 了 串口通 信 的接 口定义 、 线标 准 、 介 接 通信 协 议 和梅 钢 热 轧喷 印控 制 系统 使 用
运输 区喷 印 点时 , 喷印 机能够 及 时定位 , 钢卷 的 在
顶端 和侧 端 喷印 钢卷 号 。
1 梅钢 热轧 喷 印系统 组态及 原理
梅钢热轧喷印系统采用三层网络通信架构实
现 , teNe 网 络 层 、 G 网 络 层 和 G Nis网 E hr t E D e u 络层 。具 体组 态方 式见 图 1 。
采用 。在 串行 通 讯 时 , 求通 讯 双 方 都 采用 一 个 要 标 准接 口, 不 同 的设 备 可 以方 便 地 连接 起来 进 使 行通信。 梅 钢热 轧主轧 线 喷 印系统使 用 串 口及 串 口通 信 控制 程序 , GE 系统 的 喷 印 数 据 和 喷 印控 制 将 数 据传输 给 三菱 A&M L P C系统 , 旦 钢卷到 达 一
所 谓通信协 议是 指通信 双方 的一种 约定 。约
定包 括 对 数据 格 式 、 同步方式 、 送 速 度 、 传 传送 步 骤、 检纠 错 方式 以及 控 制字 符定 义 等 问题 做 出统
一
备 ) D E( 据 通 信 设 备 ) 间 的 一 个 接 口, 和 C 数 之 D TE包括计 算 机 、 端 、 口打 印机 等 设 备 。通 终 串
董 刚 周 明华 一种 面向工 业控制 的 串口通信控 制技 术
plc怎么和网口串口通讯

plc怎么和网口串口通讯PLC如何与网口和串口进行通讯导语:在现代工业自动化领域,PLC(可编程逻辑控制器)是非常常见的控制设备。
而与外部设备进行通讯是PLC的重要功能之一。
本文将介绍PLC如何与网口和串口实现通讯,并探讨其应用领域和优势。
一、PLC与网口通讯PLC与网口的通讯称为以太网通讯,采用网络协议进行数据交换,能够实现设备之间的高速传输。
PLC通过网口与上位机、其他设备等进行数据通讯,实现监控、数据采集、远程操作等功能。
1. 硬件连接PLC需通过网线连接到网络交换机或路由器,确保网络通畅。
一般来说,PLC具有内置的以太网接口,只需要将网线连接到PLC的以太网口即可开始通讯。
2. 配置参数PLC与网口通讯前需要进行一些参数配置。
首先,配置IP地址、子网掩码和网关。
IP地址是PLC在网络中的身份标识,子网掩码用于指定与PLC相连的设备是否属于同一网络,网关则指定网络中的出口。
其次,配置PLC的MAC地址,以保证能够正确寻址和传输数据。
最后,配置通讯协议和端口号,确定与上位机进行通讯时所需的规则和端口。
3. 通讯协议通讯协议是PLC与上位机之间进行数据交换的规则,常用的有Modbus TCP、Ethernet/IP、PROFINET等。
根据实际需求选择合适的通讯协议,并在PLC和上位机之间进行相应的配置和参数设置。
同时,在通讯过程中确定数据传输格式、数据长度、起始地址等,以确保数据的准确传输。
二、PLC与串口通讯与网口不同,串口通讯是PLC与其他设备进行点对点的数据交换,适用于距离较远、数据传输量较小的场景。
串口通讯有多种类型,常见的有RS-232和RS-485。
1. 硬件连接PLC与串口设备通过串口线连接,RS-232通常使用DB9接口,RS-485通常使用RJ45接口。
将PLC和串口设备的串口线正确连接后,可以开始进行串口通讯。
2. 配置参数串口通讯的参数配置包括波特率、数据位、停止位和校验位等。
串口通讯协议
串口通讯协议串口通讯协议是一种用于在计算机和外部设备之间进行数据传输的通信协议。
它是通过串行通信接口(串口)将数据以逐位的方式传输。
串口通讯协议通常用于连接计算机和各种外设,如打印机、调制解调器、传感器等。
1. 什么是串口通讯协议?串口通讯协议是一种规定了数据传输格式和通信规则的协议。
它定义了数据帧的结构、数据的编码和解码方式、数据的传输速率等。
串口通讯协议通常由硬件和软件两部分组成。
硬件部分包括串口接口的物理连接、电气特性以及数据线的连接方式。
串口通常包括发送线(TX)、接收线(RX)和地线(GND)。
这些线路通过串口线连接计算机和外设。
软件部分涉及到数据的传输和解析。
在串口通讯中,数据被分为连续的字节,并通过串行方式逐个传输。
发送方将字节一位一位地发送到接收方,接收方则按照事先约定好的规则解析和处理数据。
2. 常见的串口通讯协议2.1 RS-232RS-232是一种常见的串口通讯协议,它定义了串口的物理接口和电气特性。
RS-232通常使用DB9或DB25连接器,并且规定了数据线的连接方式、电平范围等。
2.2 UARTUART(Universal Asynchronous Receiver/Transmitter)是一种通用的异步收发器。
它是实现串口通讯的重要组件,负责将数据从并行格式转换为串行格式,并在发送和接收之间进行时序控制。
UART可以通过调整参数来适应不同的通信需求,如波特率、数据位、停止位和校验位等。
2.3 SPISPI(Serial Peripheral Interface)是一种同步串行通信协议,常用于连接微控制器和外部设备。
SPI使用4条线进行通信,包括时钟线、数据线、主从选择线和片选线。
SPI具有高速传输和多设备连接的优势。
2.4 I2CI2C(Inter-Integrated Circuit)是一种串行通信协议,用于连接集成电路芯片之间的通信。
I2C使用两条线进行通信,一条是时钟线(SCL),另一条是数据线(SDA)。
PLC与单片机之间的串行通信实现方法探讨

PLC与单片机之间的串行通信实现方法探讨随着工业自动化的不断发展,PLC(Programmable Logic Controller,可编程逻辑控制器)和单片机作为常用的控制设备,扮演着越来越重要的角色。
在实际的工业生产中,PLC和单片机往往需要进行数据的交互和通信,以实现对工艺过程的控制和监测。
而在这种通信中,串行通信被广泛应用。
本文将探讨PLC和单片机之间的串行通信实现方法,以期为实际应用提供一些参考。
一、串行通信概述串行通信是指在数据传输中,比特按照一定的顺序进行传送,也就是每次只传送一个比特位。
与之相对应的是并行通信,其数据在传输时多个比特同时传送。
在实际工业控制系统中,串行通信由于线缆布置简单、传输距离远和干扰小等特点而得到了广泛的应用。
串行通信包含同步和异步两种方式。
在同步串行通信中,发送和接收设备通过一个时钟信号实现同步传输。
而在异步串行通信中,传输的数据通过起始位和停止位的表示来进行同步。
在工业控制系统中,由于同步通信受到时钟信号的限制,一般采用异步串行通信的方式。
二、PLC与单片机之间的串行通信现在让我们来讨论PLC与单片机之间的串行通信。
PLC作为工业控制中的核心设备,通常负责控制和监测生产过程。
而单片机则常用于硬件控制和数据的采集。
在工业控制系统中,PLC和单片机之间需要进行数据的交互和通信,以实现工艺过程的控制和监测。
在实际的应用中,PLC与单片机之间的串行通信一般采用RS-232、RS-485、Modbus等通信协议。
RS-232是一种传统的串行通信标准,其传输距离较短,一般在15米左右。
RS-485则是一种适用于远距离传输的串行通信标准,其传输距离可以达到1200米。
而Modbus是一种通信协议,广泛应用于工业控制系统中,其采用主从架构,支持点对点和多点通信。
1、使用串口通信模块在实际应用中,我们可以在PLC和单片机上分别搭载串口通信模块,通过串口通信模块实现两者之间的数据交互。
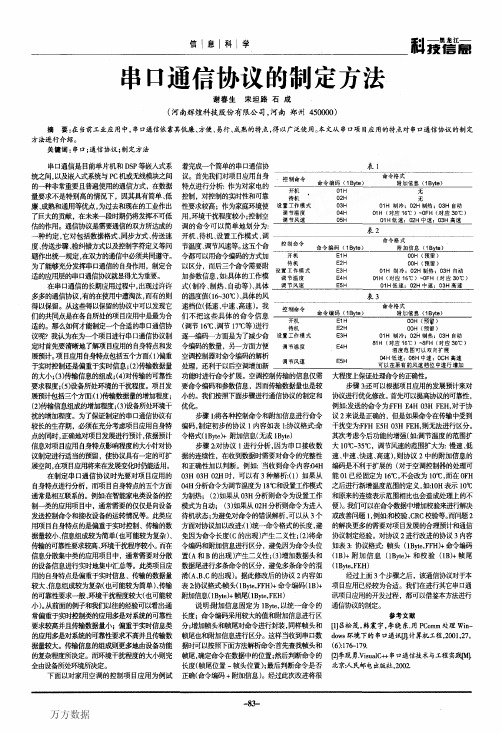
串口通信协议的制定方法
帧尾也和附加信息进行区分。这样当收到串口数 dows环境下的串口通讯叨计算机工程,2001,27,
据时可以按照下面方法解析命令:首先查找帧头和 (6):176—179.
帧尾,确定命令在数据中的位置;然后判断命令的 长度(帧尾位置一帧头位置);最后判断命令是否 正确(命令编码+附加信息)。经过此次改进将很
信1息l科【学
科 技信总 ——黑龙江——
串口通信协议的制定方法
谢春生宋坦路石成
(河南辉煌科技股份有限公司,河南郑州450000)
摘要:在当前工业应用中,串口通信依靠其低廉、方便、易行、成熟的特点,得以广泛使用。本文从串口项目应用的特点对串口通信协议的制定 方法进行介绍。
关键词:串口;通信协议;制定方法
在信息技术和网络技术高速发展的21世纪,作为社会重要的基础信息设施之一的Internet的建立需要各类网络设备的支持,然而,传统的网络管理 系统只能通过网络对具有联网功能的设备进行监控、管理和维护,而当这些设备产生故障断开网络时,或当其他的无联网功能的串口设备出现故障时 ,就需要技术人员到现场去进行维护,从而浪费了大量的人力、物力。
串口通信——精选推荐

串⼝通信概念通信(Serial Communications)的概念⾮常简单,串⼝按位(bit)发送和接收。
与串⾏通信相对的是并⾏通信。
数据传输⼀般都是以字节传输的,⼀个字节8个位。
拿⼀个并⾏通信举例来说,也就是会有8根线,每⼀根线代表⼀个位。
⼀次传输就可以传⼀个字节,⽽串⼝通信,就是传数据只有⼀根线传输,⼀次只能传⼀个位,要传⼀个字节就需要传8次。
就像⼩虎队那⾸歌⼀样,把你的⼼,我的⼼,串⼀串,再烤⼀烤。
串⼝通信就是把数据串在⼀根线上传输,所以就叫串⼝吧。
通信⽅式⼀般情况下,设备之间的通信⽅式可以分成并⾏通信和串⾏通信两种。
它们的区别是:串⾏通信分类1、按照数据传送⽅向分为:单⼯:数据传输只⽀持数据在⼀个⽅向上传输;半双⼯:允许数据在两个⽅向上传输。
但是,在某⼀时刻,只允许数据在⼀个⽅向上传输,它实际上是⼀种切换⽅向的单⼯通信;它不需要独⽴的接收端和发送端,两者可以合并⼀起使⽤⼀个端⼝。
全双⼯:允许数据同时在两个⽅向上传输。
因此,全双⼯通信是两个单⼯通信⽅式的结合,需要独⽴的接收端和发送端。
2、按照通信⽅式分为:同步通信:带时钟同步信号传输。
⽐如:SPI,IIC通信接⼝。
异步通信:不带时钟同步信号。
⽐如:UART(通⽤异步收发器),单总线。
异步通信的两个关键:第⼀,数据单元——帧,它是双⽅约定好的数据格式;第⼆,波特率,它决定了‘帧’⾥每⼀位的时间长度。
异步通信的特点:不要求收发双⽅时钟的严格⼀致,实现容易,设备开销较⼩,但每个字符要附加2~3位⽤于起⽌位,各帧之间还有间隔,因此传输效率不⾼。
在同步通讯中,收发设备上⽅会使⽤⼀根信号线传输信号,在时钟信号的驱动下双⽅进⾏协调,同步数据。
例如,通讯中通常双⽅会统⼀规定在时钟信号的上升沿或者下降沿对数据线进⾏采样。
在异步通讯中不使⽤时钟信号进⾏数据同步,它们直接在数据信号中穿插⼀些⽤于同步的信号位,或者将主题数据进⾏打包,以数据帧的格式传输数据。
通讯中还需要双⽅规约好数据的传输速率(也就是波特率)等,以便更好地同步。
串口通讯方法的三种实现
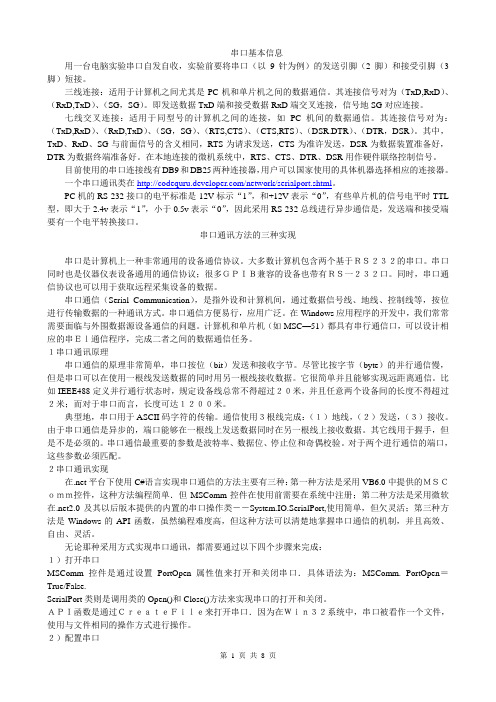
串口基本信息用一台电脑实验串口自发自收,实验前要将串口(以9针为例)的发送引脚(2脚)和接受引脚(3脚)短接。
三线连接:适用于计算机之间尤其是PC机和单片机之间的数据通信。
其连接信号对为(TxD,RxD)、(RxD,TxD)、(SG,SG)。
即发送数据TxD端和接受数据RxD端交叉连接,信号地SG对应连接。
七线交叉连接:适用于同型号的计算机之间的连接,如PC机间的数据通信。
其连接信号对为:(TxD,RxD)、(RxD,TxD)、(SG,SG)、(RTS,CTS)、(CTS,RTS)、(DSR.DTR)、(DTR,DSR)。
其中,TxD、RxD、SG与前面信号的含义相同,RTS为请求发送,CTS为准许发送,DSR为数据装置准备好,DTR为数据终端准备好。
在本地连接的微机系统中,RTS、CTS、DTR、DSR用作硬件联络控制信号。
目前使用的串口连接线有DB9和DB25两种连接器,用户可以国家使用的具体机器选择相应的连接器。
一个串口通讯类在/network/serialport.shtml。
PC机的RS-232接口的电平标准是-12V标示“1”,和+12V表示“0”,有些单片机的信号电平时TTL 型,即大于2.4v表示“1”,小于0.5v表示“0”,因此采用RS-232总线进行异步通信是,发送端和接受端要有一个电平转换接口。
串口通讯方法的三种实现串口是计算机上一种非常通用的设备通信协议。
大多数计算机包含两个基于RS232的串口。
串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS一232口。
同时,串口通信协议也可以用于获取远程采集设备的数据。
串口通信(Serial Communication),是指外设和计算机间,通过数据信号线、地线、控制线等,按位进行传输数据的一种通讯方式。
串口通信方便易行,应用广泛。
在Windows应用程序的开发中,我们常常需要面临与外围数据源设备通信的问题。
PMAC和工控机通讯设置方法

PMAC和工控机通讯设置方法PMAC(Programmable Multi-Axis Controller)是一种用于工控系统的可编程多轴控制器,用于控制和运动控制。
工控机(Industrial PC)则是一种专门用于工厂自动化控制的计算机设备。
在工业自动化领域,PMAC和工控机通常需要进行通讯以实现数据的传输和控制的交互。
下面将详细介绍PMAC和工控机的通讯设置方法。
1.PMAC与工控机连接配置:1.1串口通信:PMAC和工控机可以通过串口进行通信。
首先,将PMAC的串口连接线连接到工控机的可用串口上。
然后,通过工控机的设备管理器或串口调试助手软件,确定所使用的串口号和通信参数(如波特率、数据位、停止位、校验等)。
1.2以太网通信:PMAC和工控机也可以通过以太网进行通信。
首先,将PMAC的以太网电缆连接到工控机的以太网接口上。
然后,通过工控机的网络设置界面,配置IP地址和子网掩码等网络参数。
确保PMAC和工控机处于同一局域网内。
2.PMAC通讯驱动程序安装:2.1 如果使用串口通信,确保工控机上安装了相应的串口驱动程序。
在Windows操作系统上,可以通过设备管理器检查是否存在串口设备,并确保该设备的驱动程序已正确安装。
2.2如果使用以太网通信,确保工控机上安装了以太网卡驱动程序,并且网络连接正常。
可以通过查看网络适配器设置来确认网络连接状态。
3.PMAC和工控机通讯参数配置:3.1如果使用串口通信,打开串口调试助手软件,在配置界面中选择所使用的串口号,并设置正确的波特率、数据位、停止位、校验等通信参数。
这些参数应与PMAC端口设置一致。
3.2如果使用以太网通信,打开工控机的网络设置界面,配置正确的IP地址和子网掩码。
确保PMAC的IP地址和子网掩码与工控机在同一网络段上,并没有冲突。
4.PMAC驱动软件安装和配置:4.1在工控机上安装相应的PMAC驱动软件。
这些软件通常由PMAC供应商提供,并具有相应的文档和安装指南。
串口通讯方法的三种实现
串口基本信息用一台电脑实验串口自发自收,实验前要将串口(以9针为例)的发送引脚(2脚)和接受引脚(3脚)短接。
三线连接:适用于计算机之间尤其是PC机和单片机之间的数据通信。
其连接信号对为(TxD,RxD)、(RxD,TxD)、(SG,SG)。
即发送数据TxD端和接受数据RxD端交叉连接,信号地SG对应连接。
七线交叉连接:适用于同型号的计算机之间的连接,如PC机间的数据通信。
其连接信号对为:(TxD,RxD)、(RxD,TxD)、(SG,SG)、(RTS,CTS)、(CTS,RTS)、(DSR.DTR)、(DTR,DSR)。
其中,TxD、RxD、SG与前面信号的含义相同,RTS为请求发送,CTS为准许发送,DSR为数据装置准备好,DTR为数据终端准备好。
在本地连接的微机系统中,RTS、CTS、DTR、DSR用作硬件联络控制信号。
目前使用的串口连接线有DB9和DB25两种连接器,用户可以国家使用的具体机器选择相应的连接器。
一个串口通讯类在/network/serialport.shtml。
PC机的RS-232接口的电平标准是-12V标示“1”,和+12V表示“0”,有些单片机的信号电平时TTL 型,即大于2.4v表示“1”,小于0.5v表示“0”,因此采用RS-232总线进行异步通信是,发送端和接受端要有一个电平转换接口。
串口通讯方法的三种实现串口是计算机上一种非常通用的设备通信协议。
大多数计算机包含两个基于RS232的串口。
串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS一232口。
同时,串口通信协议也可以用于获取远程采集设备的数据。
串口通信(Serial Communication),是指外设和计算机间,通过数据信号线、地线、控制线等,按位进行传输数据的一种通讯方式。
串口通信方便易行,应用广泛。
在Windows应用程序的开发中,我们常常需要面临与外围数据源设备通信的问题。
串口通信基本接线方法
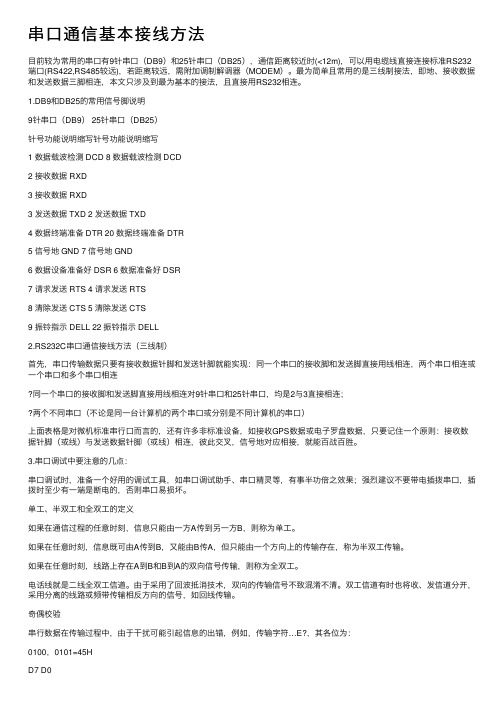
串⼝通信基本接线⽅法⽬前较为常⽤的串⼝有9针串⼝(DB9)和25针串⼝(DB25),通信距离较近时(<12m),可以⽤电缆线直接连接标准RS232端⼝(RS422,RS485较远),若距离较远,需附加调制解调器(MODEM)。
最为简单且常⽤的是三线制接法,即地、接收数据和发送数据三脚相连,本⽂只涉及到最为基本的接法,且直接⽤RS232相连。
1.DB9和DB25的常⽤信号脚说明9针串⼝(DB9) 25针串⼝(DB25)针号功能说明缩写针号功能说明缩写1 数据载波检测 DCD 8 数据载波检测 DCD2 接收数据 RXD3 接收数据 RXD3 发送数据 TXD 2 发送数据 TXD4 数据终端准备 DTR 20 数据终端准备 DTR5 信号地 GND 7 信号地 GND6 数据设备准备好 DSR 6 数据准备好 DSR7 请求发送 RTS 4 请求发送 RTS8 清除发送 CTS 5 清除发送 CTS9 振铃指⽰ DELL 22 振铃指⽰ DELL2.RS232C串⼝通信接线⽅法(三线制)⾸先,串⼝传输数据只要有接收数据针脚和发送针脚就能实现:同⼀个串⼝的接收脚和发送脚直接⽤线相连,两个串⼝相连或⼀个串⼝和多个串⼝相连同⼀个串⼝的接收脚和发送脚直接⽤线相连对9针串⼝和25针串⼝,均是2与3直接相连;两个不同串⼝(不论是同⼀台计算机的两个串⼝或分别是不同计算机的串⼝)上⾯表格是对微机标准串⾏⼝⽽⾔的,还有许多⾮标准设备,如接收GPS数据或电⼦罗盘数据,只要记住⼀个原则:接收数据针脚(或线)与发送数据针脚(或线)相连,彼此交叉,信号地对应相接,就能百战百胜。
3.串⼝调试中要注意的⼏点:串⼝调试时,准备⼀个好⽤的调试⼯具,如串⼝调试助⼿、串⼝精灵等,有事半功倍之效果;强烈建议不要带电插拨串⼝,插拨时⾄少有⼀端是断电的,否则串⼝易损坏。
单⼯、半双⼯和全双⼯的定义如果在通信过程的任意时刻,信息只能由⼀⽅A传到另⼀⽅B,则称为单⼯。
串口通信原理及操作流程

2.3 RS-485接口
RS-485是RS-422A的变型 :RS-422A用于全双工,而 RS-485则还可用于半双工。 RS-485是一种多发送器标准 ,在通信线路上最多可以使用 32 对差分驱动器/接收器。 RS-485的信号传输采用 两线间的电压来表示逻辑1和逻 辑0。由于发送方需要两根传输 线,接收方也需要两根传输线 。传输线采用差动信道,所以 它的干扰抑制性极好,又因为 它的阻抗低,无接地问题,所 以传输距离可达1200米,传 输速率可达1Mbps。
典型应用: PC + 直连电缆 + Modem
TXD 计 RXD 算 机 甲
TXD RXD 计 算 机 乙
计 算 机 甲
TXD RXD 4 5 6 20
TXD RXD 4 计 5 算 6 机 20 乙
近程通信连接
RS-232C接口存在的问题
1
2
3
传输距离短 ,传输速率 低
有电平偏移
抗干扰能力 差
第六讲串口通信原理及操作流程
曾铁军
主要内容
1 2
串行通信基础知识
串行通信总线标准及其接口
3 4
MCS-51的串行接口
51单片机串口应用举例
实例1
信息编码:文字 信息载体:文字、 纸张 信息传送方式: 邮递员
实例2
第一步 第二步 提问 说出同学A的名字或学号
课堂上老师先让同学A、 再让同学B回答问题的 过程?
串行通信 通信距离 远
并行通信 近
抗干扰能力
传输速度 成本
高
慢 低
低
快 高
异步通信与同步通信
1.异步通信 异步通信是指通信的发送与接收设备使 用各自的时钟控制数据的发送和接收过程。 为使双方的收发协调,要求发送和接收设 备的时钟尽可能一致。
PLC与单片机之间的串行通信实现方法探讨

PLC与单片机之间的串行通信实现方法探讨PLC(可编程逻辑控制器)和单片机是现代工业自动化中常见的控制设备,它们通常被用于监控和控制工厂中的设备和生产线。
在实际应用中,很多情况下需要PLC和单片机之间进行通信,以便实现数据传输和控制指令的交互。
本文将探讨PLC与单片机之间的串行通信实现方法,为工程师在实际应用中提供一些参考。
一、PLC与单片机之间的通信方式PLC与单片机之间的通信方式主要包括串行通信和网络通信。
在工业控制系统中,串行通信是最常用的一种通信方式,它可以简单地通过串口连接实现设备之间的数据传输。
PLC和单片机都支持串行通信,因此在实际应用中可以选择串行通信方式进行通讯。
二、串行通信的基本原理串行通信是将数据一位一位地按照一定的时间间隔发送出去,接收端再按照相同的时间间隔接收数据。
串行通信有两种方式:同步串行通信和异步串行通信。
在工业控制系统中,异步串行通信方式更常见,因此本文将重点介绍异步串行通信的实现方法。
异步串行通信是将数据分为帧进行传输,每一帧包括起始位、数据位、校验位和停止位。
起始位和停止位用来标识一帧数据的开始和结束,数据位用来传输实际的数据,校验位用来检测数据传输过程中是否发生错误。
在实际应用中,可以通过串口模块来实现异步串行通信。
1. 使用串口模块在实际应用中,可以在PLC和单片机上分别连接串口模块,通过串口模块来实现两者之间的串行通信。
串口模块可以实现串口转换和数据传输,它能够将串行数据转换为并行数据,方便单片机和PLC进行数据交换。
2. 使用Modbus协议Modbus是一种常用的工业通信协议,它可以在串行通信中实现设备之间的数据传输。
在实际应用中,可以使用Modbus协议来实现PLC和单片机之间的通信。
单片机可以通过Modbus协议向PLC发送控制指令,PLC可以通过Modbus协议向单片机发送传感器数据,从而实现数据交换和控制指令的传输。
3. 使用RS485通信以一个简单的例子来说明PLC与单片机之间的串行通信实现方法。
固高工业机器人使用说明书之通讯(TCP、串口)
目录版权声明 (1)声明 (1)联系我们 (1)第1章TCPIP通讯 (3)1.1通信设置 (3)1.2指令说明 (5)1.2.1打开通讯 (5)1.2.2关闭通讯 (5)1.2.3接收数据 (5)1.2.4发送数据 (6)1.3示教程序 (6)第2章RS232串口通信 (7)2.1通信设置 (7)2.2指令说明 (9)2.2.1 打开串口端口 (9)2.2.2 关闭串口端口 (9)2.2.3接收数据 (9)2.2.4发送数据 (9)2.3示教程序 (10)第3章字符串处理指令 (13)3.1指令说明 (13)3.1.1 整型转字符串 (13)3.1.2 位置型转字符串 (13)3.1.3 实数型转字符串 (13)3.1.4 字符串转整型 (13)3.1.5 字符串转位置点 (13)3.1.6 字符串转实数 (13)3.1.7 字符串连接 (14)3.1.8 字符串拆分 (14)3.1.9 字符串比较 (14)3.1.10 计算字符串长度 (14)3.1.11 字符串取左 (14)3.1.12 字符串取右 (14)3.1.13 取字符串中间的部分字符 (14)TCPIP通讯TCPIP 通讯(即SOCKET通讯)是通过网线将服务器Server端与客户机Client端进行连接,在遵循类似ISO/OSI模型的四层层级架构的基础上通过TCP/IP协议建立的通讯。
控制器可以设置为服务器端或者客户端。
1.1 通信设置按下手持操作示教器上的【上移】或者【下移】使主菜单下。
按下手持操作示教器上的【右移】【上移】或者【下移】使主菜。
按下手持操作示教器上的【右移】的通讯功能可以同时开通,你可以点击通路选择下面的向左或者向右按每次改变或者设置新的通路选择参才出按服务器地址:即服务器端的IP地址,当机器人控制器作为客户端时,则需要填入服务器IP地址;当机器人控制器作为服务器端,则可以不填该参数。
端口:服务器端口又是本地端口号,前者是对于控制器作为客户端而言,后者是对于控制器作为服务器端而言。
第六讲串口通信原理及操作流程

第六讲串口通信原理及操作流程串口通信是一种通过串行数据传输的方式进行通讯的技术。
它广泛应用于计算机与外部设备之间的连接,例如打印机、模块等。
本文将介绍串口通信的原理及操作流程。
一、串口通信原理:串口通信使用串行通信方式,将数据一位一位地传输。
串行通信有两种常见的数据传输标准,即RS-232和RS-485、RS-232是一种点对点的连接方式,它使用一个传输线和一个接收线进行数据传输。
RS-485是一种多点连接方式,它使用一条传输线和多条接收线进行数据传输。
在串口通信中,数据被分为多个字节进行传输。
每个字节由起始位、数据位、校验位和停止位组成。
起始位用于标识数据传输的开始,停止位用于标识数据传输的结束。
数据位用来存储要传输的数据,校验位用于检验数据的正确性。
二、串口通信的操作流程:1.打开串口:首先需要打开串口,即建立与外部设备的连接。
在Windows系统中,可以使用CreateFile函数来打开串口。
该函数需要指定串口的名称和访问权限。
2.配置串口参数:打开串口后,需要配置串口参数。
应根据外部设备的要求设置波特率、数据位、校验位和停止位等参数。
可以使用DCB结构体来配置串口参数。
3.读取数据:配置串口参数后,可以通过ReadFile函数来读取串口接收缓冲区中的数据。
该函数需要指定串口句柄、接收缓冲区和读取的字节数。
4.发送数据:发送数据时,需要将要发送的数据写入串口发送缓冲区。
可以使用WriteFile函数来发送数据。
该函数需要指定串口句柄、发送缓冲区和发送的字节数。
5.关闭串口:在使用完串口后,需要关闭串口以释放资源。
可以使用CloseHandle 函数来关闭串口。
三、串口通信的应用场景:串口通信由于有传输距离长、抗干扰能力强、线路简单等优点,被广泛应用于各个领域。
以下是一些常见的串口通信应用场景:1.打印机:计算机与打印机之间通过串口通信来传输打印任务。
2.模块:许多外部设备(如传感器、Wi-Fi模块等)都通过串口与计算机进行通信。
工业串口通信之如何使用S7-1200的CM1241模块

工业串口通信之如何使用S7-1200的CM1241模块工控行业的小伙伴们都知道以前在中低端PLC市场西门子有S7-200系列产品,但是细心的你也许早就发现,S7-200系列PLC在组态编程上都与S7-300/400系列有很大的不同。
S7-300/400系列PLC 用Step7(或博途)组态和编程,而S7-200用Step7 Micro/Win组态和编程,这几乎就是一个全新的平台,对于Step7很熟悉的人也需要从新开始学习。
同样是西门子的产品,差别怎么就这么大呢?这是因为S7-200系列PLC是西门子收购了一家美国公司开发的产品,从S7-200 的编程模式可以看到一些美日式PLC的影子。
虽然西门子在中高端PLC市场做的风生水起,但是没有自己的中低端PLC 产品一直是西门子的一个心病。
终于,S7-1200系列PLC面世了。
与S7-200系列不同,S7-1200是纯德国血统,可以用西门子的通用软件平台博途(TIA)组态和编程。
S7-1200支持经典的编程语言:梯形图(LADDER)和方框图(FDB),同时还支持SCL,熟悉计算机高级语言的人可以很快上手。
S7-1200支持布尔量,字节,字,整形,双字,日期时间类型,用户自定义类型等数据类型,很少见到一个中低端的PLC支持这么多数据类型;S7-1200支持PID调节,集成HMI显示,集成ProfiNet网络,支持Profibus-DP网络,支持第三方通信。
还有一点很重要,颜值很高,如下图:S7-1200系列PLC性价比高,完全能胜任很多中小型的生产线,个人认为将在中小规模的自动化市场有不错的应用前景。
S7-1200可以通过CM(Communication Module)1241和CB(Communication Board)来进行串口的通信。
CM只能安装在CPU 的左侧或者另一个CM的左侧,S7-1200最多支持三个CM模块,加上CB模板,总共最多支持四个通信接口。
串口通信基本接线方法

串口通信基本接线方法龚建伟2001.6.20目次:1.DB9和DB25的常用信号脚说明2.RS232C串口通信接线方法3.串口调试中要注意的几点目前较为常用的串口有9针串口(DB9)和25针串口(DB25),通信距离较近时(<12m),可以用电缆线直接连接标准RS232端口(RS422,RS485较远),若距离较远,需附加调制解调器(MODEM)。
最为简单且常用的是三线制接法,即地、接收数据和发送数据三脚相连,本文只涉及到最为基本的接法,且直接用RS232相连,以回答前段网友的咨询。
1.DB9和DB25的常用信号脚说明9针串口(DB9)25针串口(DB25)针号功能说明缩写针号功能说明缩写1数据载波检测DCD8数据载波检测DCD2接收数据RXD3接收数据RXD3发送数据TXD2发送数据TXD4数据终端准备DTR20数据终端准备DTR5信号地GND7信号地GND6数据设备准备好DSR6数据准备好DSR7请求发送RTS4请求发送RTS8清除发送CTS5清除发送CTS9振铃指示DELL22振铃指示DELL2.RS232C串口通信接线方法(三线制)首先,串口传输数据只要有接收数据针脚和发送针脚就能实现:同一个串口的接收脚和发送脚直接用线相连,两个串口相连或一个串口和多个串口相连•同一个串口的接收脚和发送脚直接用线相连对9针串口和25针串口,均是2与3直接相连;•两个不同串口(不论是同一台计算机的两个串口或分别是不同计算机的串口)9针-9针25针-25针9针-25针233222上面表格是对微机标准串行口而言的,还有许多非标准设备,如接收GPS数据或电子罗盘数据,只要记住一个原则:接收数据针脚(或线)与发送数据针脚(或线)相连,彼些交叉,信号地对应相接,就能百战百胜。
3.串口调试中要注意的几点:•不同编码机制不能混接,如RS232C不能直接与RS422接口相连,市面上专门的各种转换器卖,必须通过转换器才能连接;•线路焊接要牢固,不然程序没问题,却因为接线问题误事;•串口调试时,准备一个好用的调试工具,如串口调试助手、串口精灵等,有事半功倍之效果;•强烈建议不要带电插拨串口,插拨时至少有一端是断电的,否则串口易损坏。
PLC与工控机的串口通信设计

PLC与工控机的串口通信设计摘要随着计算机技术,自动控制技术及网络技术的迅速发展,在工业领域中对控制系统的要求逐渐增高。
在众多的工业控制系统中,分布式控制系统应用最为广泛。
在分布式控制系统中,PLC作为现场控制设备,被用于数据采集与控制。
而PLC 又由工业控制计算机进行编程从而实现两者的数据交换。
PLC与工控机的结合,提供了一种可靠、经济和开发周期短的分布式控制系统构建方案。
本文主要以PLC作为硬件基础,结合工控机编程软件实现两者间的串口通信。
串口通信的实现是工业控制系统的关键,它作为一种灵活、方便、可靠的数据传输方式,在工业现场得到了越来越多的应用。
本文中使用的是三菱PLC与工控机进行通信。
通过了解PLC的基本结构、工作原理、功能及特点、内部运作方式和扫描周期,以及三菱PLC的工作模式与网络通信结构,确定PLC与工控机的连接通过标准RS-232通信电缆实现。
PLC与工控机利用标准RS-232通信电缆连接后,首先要设置上下位机的通信格式,具体为数据长度、奇偶校验、停止位、波特率、标题、终结符、控制线、和校验、协议等内容的设置;继而还要设置通信控制协议格式。
最后由工控机软件进行编程,编程软件由VC++6.0实现,在软件平台内采用通信空间MSComm空间进行工控机与PLC的通信。
将PLC与工控机连接后进行了通信验证,可以证明该程序可以实现PLC与工控机的串口通信。
关键词:PLC、工控机、串口通信、VC++6.0AbstractWith the rapid development of the computer technology, the automaticcontrol technology and the network communication, the demand presented by the industry and mining enterprise to the control system is higher and higher. In the multitudinous industrial control system, the distributed control system’s application is most widespread. In the distributed control system, they usually select PLCas the control device, using in the data acquisition and control. By the industrial control computer, PLC can be programmed to realize the data exchange. The combination of PLC and industrial controlling provides a reliable, economic and short development cycle to build distributed control system. Based on the hardware of the PLC ,the pape combined with software to realize the serial communication between industrial control programming.The implementation of serial communication is the key to the industrial control system, as a flexible, convenient and reliable way of data transmission, is becoming more and more popular in the industrial field of application. The paper use a mitsubishi PLC and industrial computer to realize the communicate. Through understanding the basic structure, working principle, functions and characteristics, internal operation and scan cycle of PLC. And the operation mode of the Mitsubishi PLC and network communication structure, determine the PLC and industrial PC connected via a standard RS - 232 communication cables.PLC and industrial PC using a standard RS-232 communication cable connection, the first to set up the upper and lower position machine communication format, specific to the data length, baud rate, parity, stop bits, and title, terminator, the line of control, and calibration, agreement, etc. Set of content; then set the communication control protocol format. Finally conducted by the industrial computer software programming, the programming software by VC++ 6.0 to realize, in the software platform USES the communication space MSComm space carries on the industrial PC and PLCcommunications. After connect the PLC and industrial control communication verification, to prove the program can realize serial communication of PLC and industrial control.Key word: PLC,industrial control computer, serial port communication, VC++6.0目录第1章绪论1.1 课题研究背景及意义 (25)1.2 国内外发展现状 (26)1.2.1 PCI国内外发展现状 (26)1.2.2 工控机的国内外发展现状 (27)1.3串口通信介绍 (29)1.4本课题主要研究的内容 (30)第2章可编程控制器与工控机的概述2.1PLC的工作原理及功能特点 (32)2.1.1 PLC的基本结构 (32)2.1.2 PLC的主要功能及特点 (33)2.1.3 PLC的工作原理 ............................ 错误!未定义书签。
利用组态王实现串口通信控制.

学习情境二利用组态王实现串口通信控制工作任务一 组态王使用简介及板卡的安装【学习目标】1.了解组态王监控软件,能够应用组态王软件进行简单完整的工程开发。
2.了解工控机、数据采集板卡及其安装过程。
【技能目标】学生能够独立在计算机上安装完整的监控组态软件KingView6.5,了解组态王软件的功能和基本操作步骤。
掌握数据采集板卡的安装方法。
【所需设备、工具和材料】序号 名称 规格型号 数量1 PC机 12 PCI-1710HG多功能板卡 PCI-1710 13 PCL-10168数据线缆 PCL-10168 14 组态王软件 Kingview6.53 1【相关知识】知识一. 组态王使用简介一. 组态王通用版人机界面软件Kingview系列运行于Microsoft Windows XP/NT(SP6)/2000(SP4)中文平台建议配置:CPU:1G内存:256M显存:64M硬盘:20G(视实际存储情况)二. 组态王通用版软件的结构“组态王6.5”是运行于Microsoft Windows XP/NT/2000中文平台上的全中文界面的人机界面软件(HMI),窗体框架结构,界面直观易学易用。
采用了多线程、COM组件等新技术,实现了实时多任务且软件运行稳定可靠。
“组态王6.5”软件包由工程管理器ProjManager、工程浏览器TouchExplorer、画面开发系统TouchMak(内嵌于工程浏览器)和运行系统TouchVew四部分组成。
工程管理器用于新工程的创建和已有工程的管理,在工程浏览器中我们可以查看、配置工程的各个组成部分,画面的开发和运行由工程浏览器调用画面制作系统TouchMak和工程运行系统TouchVew 来完成的。
工程管理器ProjManager是计算机内的所有应用工程的统一管理环境。
ProjManager具有很强的管理功能,可用于新工程的创建及删除,并能对已有工程进行搜索、备份及有效恢复,实现数据词典的导入和导出等功能。
串口通讯线束抑制emi

串口通讯线束抑制emi串口通讯线束抑制EMI随着现代工业和科技的不断发展,我们对于电子设备的要求越来越高,同时对于电磁兼容性(EMC)的要求也越来越高。
在工业控制领域,串口通讯是一种广泛应用的通讯方式,但同时也会产生较强的电磁干扰(EMI)。
为了控制这种干扰,本文介绍了一种通过线束抑制EMI 的方法。
1. EMI的来源与危害在工业控制过程中,电子设备之间的通讯是必不可少的。
串口通讯是一种常用的通讯方式,但是由于通讯线中的电流和电压会产生电磁场,这种电磁场会对周围的电子设备产生干扰,从而影响电子设备的正常工作。
这种干扰就是所谓的电磁干扰(EMI)。
EMI不仅会对工业控制过程中的电子设备产生影响,还可能会对其他电子设备、通讯系统、无线电接收机等产生干扰。
因此,控制EMI是非常必要的。
2. 线束抑制EMI的原理线束抑制EMI是一种有效的方法,它的原理是通过将串口通讯线束紧密地包裹在一起,形成一种屏蔽,从而阻止电磁辐射的产生。
这种方法可以有效地降低EMI的产生,提高电子设备的抗干扰能力。
线束抑制EMI的具体实现方法是将串口通讯线束分成若干个部分,并且将每个部分内部的线束绞在一起,形成一个紧密的线束。
同时,还需要在线束的外面加上一层金属网,形成一种屏蔽。
这种屏蔽可以有效地阻止电磁辐射的产生,从而降低EMI的干扰水平。
3. 线束抑制EMI的应用线束抑制EMI是一种非常实用的方法,它可以广泛应用于各种电子设备中。
在工业控制过程中,线束抑制EMI可以应用于各种串口通讯设备中,如PLC、变频器、传感器、电机控制器等。
同时,这种方法还可以应用于其他电子设备中,如计算机、通讯设备、医疗设备等。
4. 线束抑制EMI的优势相比于其他抑制EMI的方法,线束抑制EMI具有以下几个优势:(1) 成本较低:线束抑制EMI的成本相对较低,因为它只需要在线束上加上一层金属网即可。
(2) 有效性高:线束抑制EMI的有效性非常高,因为它可以将线束紧密地包裹在一起,形成一种屏蔽,从而阻止电磁辐射的产生。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业控制--串口通讯方法(WINAPI实现)介绍介绍工业控制领域利用串口和外围设备进行通讯。
正文前言:总所周之,利用串口进行数据通讯在在通讯通讯领域重占有着重要的地位。
利用RS232-RS485进行数据信号的采集和传递是VC编程的又一大热点。
串口通讯在通讯软件重有着十分广泛的应用。
如电话、传真、视频和各种控制等。
在各种开发工具中间,VC由于功能强大和灵活,同时也得到了Microsoft的最大支持,所以在一般进行涉及硬件操作的通讯编程重,大都推荐使用VC作为开发工具。
然而工业控制串口通讯这个又不同于一般的串口通讯程序,因为控制外围设备传送的大都是十六进制数据(BYTE类型),所以,为了提高程序的运行稳定性,我们在编写程序进行通讯时可以不考虑传送BYTE类型数据的工作。
串口通讯目前流行的方法大概有两种:一是利用Microsoft提供的CMSCOMM控件进行通讯,不过现在很多程序员都觉应该放弃这种方式。
二是利用WINAPI函数进行编程,这种编程的难度最高,要求你要掌握很多的API函数。
三是利用现在网络上面提供的一些串口通讯控件进行编写,比如CSerial类等。
程序实现:我在经过许多的项目的开发和实践中发现,采用WIN API函数进行串口的开发能够给程序员很大的控件,并且程序运也很稳定。
所以我将与串口接触的函数进行封装,然后在各个工程中进行调用,效果还是比较好的,现将各个函数和调用方法列举出来,希望对各位有所帮助。
一、设置串口相关工作 #define MAXBLOCK 2048 #define XON 0x11 #define XOFF 0x13 BOOL SetCom(HANDLE &m_hCom, const char *m_sPort, int BaudRate, int Databit, CString parity, CString stopbit { COMMTIMEOUTS TimeOuts; ///串口输出时间超时设置 DCB dcb; ///与端口匹配的设备 m_hCom=CreateFile(m_sPort, GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL |FILE_FLAG_OVERLAPPED, NULL; // 以重叠方式打开串口if(m_hCom==INVALID_HANDLE_VALUE { AfxMessageBox("设置串口部分,串口打开失败"; /////重叠方式异步通信(INVALID_HANDLE_VALUE)函数失败。
return FALSE; } SetupComm(m_hCom,MAXBLOCK,MAXBLOCK; //设置缓冲区memset(&TimeOuts,0,sizeof(TimeOuts; TimeOuts.ReadIntervalTimeout=MAXDWORD; // 把间隔超时设为最大,把总超时设为0将导致ReadFile立即返回并完成操作TimeOuts.ReadTotalTimeoutMultiplier=0; //读时间系数TimeOuts.ReadTotalTimeoutConstant=0; //读时间常量TimeOuts.WriteTotalTimeoutMultiplier=50; //总超时=时间系数*要求读/写的字符数+时间常量 TimeOuts.WriteTotalTimeoutConstant=2000; //设置写超时以指定WriteComm成员函数中的SetCommTimeouts(m_hCom, &TimeOuts; //GetOverlappedResult函数的等待时间*/ if(!GetCommState(m_hCom, &dcb ////串口打开方式、端口、波特率与端口匹配的设备 { AfxMessageBox("GetCommState Failed"; return FALSE; } dcb.fParity=TRUE; //允许奇偶校验 dcb.fBinary=TRUE; if(parity=="NONE" dcb.Parity=NOPARITY;if(parity=="ODD" dcb.Parity=ODDPARITY; if(parity=="EVEN"dcb.Parity=EVENPARITY; if(stopbit=="1"//设置波特率 dcb.StopBits=ONESTOPBIT; //if(stopbit=="0"//设置波特率 // dcb.StopBits=NONESTOPBIT; if(stopbit=="2"//设置波特率 dcb.StopBits=TWOSTOPBITS; BOOL m_bEcho=FALSE; /// intm_nFlowCtrl=0; BOOL m_bNewLine=FALSE; /// dcb.BaudRate=BaudRate; // 波特率dcb.ByteSize=Databit; // 每字节位数 // 硬件流控制设置dcb.fOutxCtsFlow=m_nFlowCtrl==1;dcb.fRtsControl=m_nFlowCtrl==1 ?RTS_CONTROL_HANDSHAKE:RTS_CONTROL _ENABLE; // XON/XOFF流控制设置(软件流控制!)dcb.fInX=dcb.fOutX=m_nFlowCtrl==2; dcb.XonChar=XON; dcb.XoffChar=XOFF; dcb.XonLim=50; dcb.XoffLim=50; if(SetCommState(m_hCom, &dcb return TRUE;////com的通讯口设置 else { AfxMessageBox("串口已打开,设置失败"; return FALSE; } } 二、读串口操作: int ReadCom(HANDLE hComm, BYTE inbuff[], DWORD &nBytesRead, int ReadTime { DWORD lrc; ///纵向冗余校验 DWORD endtime; /////////jiesuo static OVERLAPPED ol; int ReadNumber=0; int numCount=0 ; //控制读取的数目 DWORD dwErrorMask,nToRead; COMSTAT comstat; ol.Offset=0; ///相对文件开始的字节偏移量 ol.OffsetHigh=0; ///开始传送数据的字节偏移量的高位字,管道和通信时调用进程可忽略。
ol.hEvent=NULL; ///标识事件,数据传送完成时设为信号状态 ol.hEvent=CreateEvent(NULL,TRUE,FALSE,NULL;endtime=GetTickCount(+ReadTime;//GetTickCount(取回系统开始至此所用的时间(毫秒 for(int i=0;i<2000;i++ inbuff[i]=0; Sleep(ReadTime;ClearCommError(hComm,&dwErrorMask,&comstat;nToRead=min(2000,comstat.cbInQue; if(int(nToRead<2 goto Loop;if(!ReadFile(hComm,inbuff,nToRead,&nBytesRead,&ol{ if((lrc=GetLastError(==ERROR_IO_PENDING { ///////////////////endtime=GetTickCount(+ReadTime;//GetTickCount(取回系统开始至此所用的时间(毫秒 while(!GetOverlappedResult(hComm,&ol,&nBytesRead,FALSE//该函数取回重叠操作的结果 { if(GetTickCount(>endtime break;} } } return 1; Loop: return 0; } 三、写串口命令 int WriteCom(HANDLE hComm, BYTE Outbuff[], int size, int bWrite[] { DWORD nBytesWrite,endtime,lrc; static OVERLAPPED ol; DWORD dwErrorMask,dwError; COMSTAT comstat;ol.hEvent=CreateEvent(NULL,TRUE,FALSE,NULL; ol.Offset=0; ol.OffsetHigh=0; ol.hEvent=NULL; ///标识事件,数据传送完成时,将它设为信号状态ClearCommError(hComm,&dwErrorMask,&comstat;if(!WriteFile(hComm,Outbuff,size,&nBytesWrite,&ol{ if((lrc=GetLastError(==ERROR_IO_PENDING { endtime=GetTickCount(+1000; while(!GetOverlappedResult(hComm,&ol,&nBytesWrite,FALSE{ dwError=GetLastError(; if(GetTickCount(>endtime { AfxMessageBox("写串口时间过长,目前串口发送缓冲区中的数据数目为空"; break; }if(dwError=ERROR_IO_INCOMPLETE continue; //未完全读完时的正常返回结果else { // 发生错误,尝试恢复! ClearCommError(hComm,&dwError,&comstat; break; } } } } FlushFileBuffers(hComm; PurgeComm(hComm,PURGE_TXCLEAR; bWrite=0; return 1; } 四、调用方法很简单,只需要将你的串口参数进行简单的设置就可以了。