自动控制原理课程设计最终版,重庆邮电大学移通学院
自动控制原理课程设计
自动控制原理课程设计一、设计任务书题 目:同时提高机器人转动关节的稳定性和操作性能,始终是一个具有挑战性的问题。
提高增益可以满足对稳定性的要求,但随之而来的是无法接受过大的超调量。
用于转动控制的电-液压系统的框图如下,其中,手臂转动的传动函数为)150/6400/(100)(2++=s s s G s试设计一个合适的校正网络,使系统的速度误差系数20=v K ,阶跃响应的超调量小于%10。
二、设计过程(一)人工设计过程解:根据初始条件,调整开环传递函数:G(s)=)1506400(1002++s s s要求kv=20,σp≤10%未加补偿时的开环放大系数K=100/s ,校正后K =kv=20/s,因此需要一个k1=51的比例环节,增加此环节后的幅值穿越频率变为20rad/s.计算相位裕度: 由20lg100-20lg80=60lgωc =3210080⨯=86.2rad/sγ0=180-+-18090arctan 16.172.1=-34<0因此系统不稳定先计算相位裕度,判断不稳定由bode 图知系统低频段已满足要求。
待补偿系统在希望的幅值穿越频率ωc附近的中频段的开环对数幅频特性的斜率是-20Db/dec,但该频段20lgG>0Db.因此考虑用滞后补偿。
技术指标为σp=10%,利用教材上的经验公式已无法达到要求。
在另一本教材(《自动控制原理》(第2版)),吴麒主编,清华大学出版社,有另一经验公式σp=γ2000-20利用此公式,得相位裕度γ>67% 技术指标对幅值穿越没有要求。
技术指标对幅值穿越频率ωc没有要求。
20lg G中ω<20时斜率为-20dB/dec ,拟将这部分作为中频段,取ωc=16rad/s在0dB 线上取ωc=16的点B过B 作-20dB/dec 直线至ω=80rad/s 处点C 。
延长CF 至点D ,点D 的角频率就是滞后补偿网络的转折频率ω1。
自动控制原理课程设计
一、设计目的1. 了解控制系统设计的一般方法、步骤。
2. 掌握对系统进行稳定性的分析、稳态误差分析以及动态特性分析的方法。
3. 掌握利用MA TLAB 对控制理论内容进行分析和研究的能力。
4. 提高分析问题解决问题的能力。
二、设计内容与要求设计内容1. 阅读有关资料。
2. 对系统进行稳定性分析、稳态误差分析以及动态特性分析。
3. 绘制根轨迹图、Bode 图、Nyquist 图。
4. 设计校正系统,满足工作要求。
设计要求1. 能用MA TLAB 解复杂的自动控制理论题目。
2. 能用MA TLAB 设计控制系统以满足具体的性能指标。
3. 能灵活应用MA TLAB 的CONTROL SYSTEM 工具箱和SIMULINK 仿真软件,分析系统的性能。
试验设备、环境装有MA TLAB 软件的计算机一台。
三、设计步骤已知开环传递函数为40()(0.21)(0.06251)G S S S S =++1. 利用MATLAB 函数求根,并判断系统稳定性。
程序如下所示: >> num=[40];>> den=[0.0125 0.2625 1 0] den =0.0125 0.2625 1.0000 0 >> g=tf(num,den) ; >> sys=feedback(g,1); >> pzmap(g); >> num=[40];>> den=[0.0125 0.2625 1 40] den =0.0125 0.2625 1.0000 40.0000 >> t=tf(num,den); >> pzmap(t);>> [p,z]=pzmap(g); >> p1=p;z1=z;>> disp('开环极点');开环极点>> disp(p1);-16-5>> disp('开环零点')开环零点>> disp(z1);>> den=sys.den{1};>> r=roots(den);>> disp('闭环极点')闭环极点>> disp(r)-23.41871.2094 +11.6267i1.2094 -11.6267i图1 开环零极点分布图图2 闭环零极点分布图由开环零极点图可知,系统有极点在虚轴上,故系统开环临界稳定;由闭环零极点图可知,系统有极点在右半平面,故系统闭环不稳定。
重庆大学 自动控制原理课程设计
目录1 实验背景 (2)2 实验介绍 (3)3 微分方程和传递函数 (6)1 实验背景在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用。
自动控制原理是相对于人工控制概念而言的,自动控制是指在没有人直接参与的情况下,利用外加的设备或装置(称控制装置或控制器),使机器,设备或生产过程(统称被控对象)的某个工作状态或参数(即被控制量)自动地按照预定的规律运行。
在自动控制原理【1】中提出,20世纪50年代末60年代初,由于空间技术发展的需要,对自动控制的精密性和经济指标,提出了极其严格的要求;同时,由于数字计算机,特别是微型机的迅速发展,为控制理论的发展提供了有力的工具。
在他们的推动下,控制理论有了重大发展,如庞特里亚金的极大值原理,贝尔曼的动态规划理论。
卡尔曼的能控性能观测性和最优滤波理论等,这些都标志着控制理论已从经典控制理论发展到现代控制理论的阶段。
现代控制理论的特点。
是采用状态空间法(时域方法),研究“多输入-多输出”控制系统、时变和非线性控制系统的分析和设计。
现在,随着技术革命和大规模复杂系统的发展,已促使控制理论开始向第三个发展阶段即第三代控制理论——大系统理论和智能控制理论发展。
在其他文献中也有所述及(如下):至今自动控制已经经历了五代的发展:第一代过程控制体系是150年前基于5-13psi的气动信号标准(气动控制系统PCS,Pneumatic Control System)。
简单的就地操作模式,控制理论初步形成,尚未有控制室的概念。
第二代过程控制体系(模拟式或ACS,Analog Control System)是基于0-10mA或4-20mA 的电流模拟信号,这一明显的进步,在整整25年内牢牢地统治了整个自动控制领域。
它标志了电气自动控制时代的到来。
控制理论有了重大发展,三大控制论的确立奠定了现代控制的基础;控制室的设立,控制功能分离的模式一直沿用至今。
第三代过程控制体系(CCS,Computer Control System).70年代开始了数字计算机的应用,产生了巨大的技术优势,人们在测量,模拟和逻辑控制领域率先使用,从而产生了第三代过程控制体系(CCS,Computer Control System)。
自动控制理论课程设计
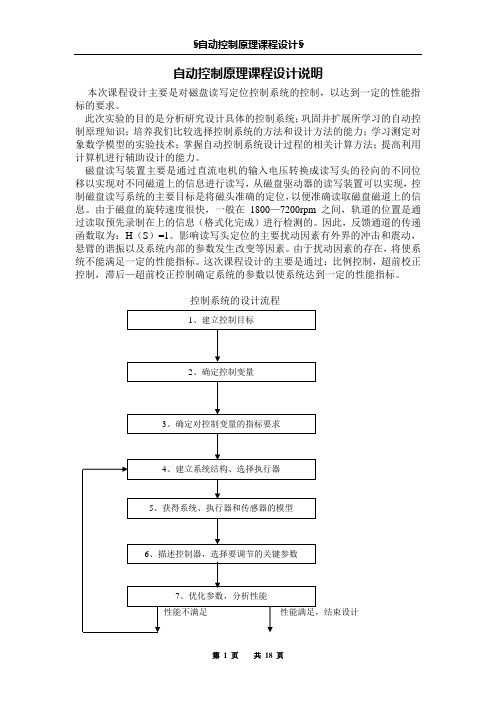
自动控制原理课程设计说明本次课程设计主要是对磁盘读写定位控制系统的控制,以达到一定的性能指标的要求。
此次实验的目的是分析研究设计具体的控制系统;巩固并扩展所学习的自动控制原理知识;培养我们比较选择控制系统的方法和设计方法的能力;学习测定对象数学模型的实验技术;掌握自动控制系统设计过程的相关计算方法;提高利用计算机进行辅助设计的能力。
磁盘读写装置主要是通过直流电机的输入电压转换成读写头的径向的不同位移以实现对不同磁道上的信息进行读写,从磁盘驱动器的读写装置可以实现,控制磁盘读写系统的主要目标是将磁头准确的定位,以便准确读取磁盘磁道上的信息。
由于磁盘的旋转速度很快,一般在1800—7200rpm之间,轨道的位置是通过读取预先录制在上的信息(格式化完成)进行检测的。
因此,反馈通道的传递函数取为:H(S)=1。
影响读写头定位的主要扰动因素有外界的冲击和震动,悬臂的谐振以及系统内部的参数发生改变等因素。
由于扰动因素的存在,将使系统不能满足一定的性能指标。
这次课程设计的主要是通过:比例控制,超前校正控制,滞后—超前校正控制确定系统的参数以使系统达到一定的性能指标。
控制系统的设计流程一、利用实验数据建立对象数学模型(考虑读写头与悬臂刚性连接)1、实验原理图:2、下表有采样曲线得到加以处理了数据:3、各环节及系统的传递函数分别为:G1(s)=1001265.0148.2+sG2(s)=ss +2^001408.01最终的开环传递函数:G(s)=ss s ++2^002671.03^000001778.0148.2二、采用比例控制1:表(2)系统性能指标要求Root LocusReal AxisI m a g i n a r y A x i s-2500-2000-1500-1000-500500-2000-1500-1000-500500100015002000相关程序:d1=[0.001265 1]; d2=[0.001406 1]; d3=[1 0];den1=conv(d1,d2); den=conv(den1,d3); num=[2.148]; rlocus(num,den) grid on3、在保证系统未定的前提下,折中选出比例增益在保证系统稳定的前提下,比例增益变化的最大值为809。
自动控制原理课程设计位置随动系统

,从而拖动负载运动。
~5~
重庆邮电大学自动化学院自动控制原理课程设计
直流电动机:微分方程式为 :
Tm
d M dt
m K mua K c M c
式中 Tm , K m , K c 及 M c 是考虑减速器和负载后,折算到电动机轴上的等效值。
测速发电机
是用于测量角速度并且将角速度转换成电压量的装置, 本设计中是永磁式直流测速 发电机。测速发电机的转子与带测量的轴相连接,在点电枢两端输出与转子角速度成正 比的直流电压,即 U T KT , 式中 K T 是测速发电机的比例系数。是测速发电机的输 出斜率,表示单位角速度的输出电压。
重庆邮电大学自动化学院自动控制原理课程设计
目录
一、设计题目 ....................................................................................................................... 2 1.1 设计目的 ............................................................................................................ 2 1.2 设计内容与任务 ............................................................................................... 2 二、报告正文 ....................................................................................................................... 3 2.1 任务一的分析与求解 ........................................................................................ 4 2.1.1 系统原理图 ..................................................................................................... 4 2.1.2 系统工作原理 ................................................................................................. 4 2.1.3 系统结构框图 ................................................................................................. 4 2.1.4 系统各环节传递函数..................................................................................... 5 2.2 任务二的分析与求解 ........................................................................................ 7 2.2.1 时域分析 ......................................................................................................... 7 2.2.2 频域分析 ....................................................................................................... 10 2.3 任务三的分析及求解 ...................................................................................... 11 2.3.1 校正要求 ...................................................................................................... 11 2.3.2 校正系统的函数的求解 ............................................................................... 12 2.3.3 通过 Matlab 仿真得到校正后传递函数的频域曲线特性 ............................ 12 三、设计总结及体会 .......................................................................................................... 15 3.1 总结 ................................................................................................................ 15 3.2 体会 ................................................................................................................. 15 四、参考文献: ................................................................................................................. 16 五、附录 ............................................................................................................................. 17 MATLAB 仿真函数 ............................................................................................... 17
重庆邮电大学移通学院毕业设计 (论文)教学档案1
重庆邮电大学移通学院毕业设计(论文)教学档案题目火灾报警-CAN中继器的设计系别自动化系专业名称电气自动化技术班级 1 班学生学号学生姓名赵文思指导教师(职称) 杜李苹(助教)完成时间最终评定成绩重庆邮电大学移通学院教务处制年月目录1.重庆邮电大学移通学院毕业设计(论文)任务书错误!未定义书签。
2.重庆邮电大学移通学院毕业设计 (论文)开题报告错误!未定义书签。
3.重庆邮电大学移通学院毕业设计(论文)教师指导记录错误!未定义书签。
4.重庆邮电大学移通学院毕业设计(论文) 基本情况错误!未定义书签。
5.重庆邮电大学移通学院毕业设计(论文) 指导教师评语表错误!未定义书签。
6.重庆邮电大学移通学院毕业设计(论文) 评阅意见表错误!未定义书签。
7.重庆邮电大学移通学院毕业设计(论文) 答辩记录表错误!未定义书签。
8.重庆邮电大学移通学院毕业设计(论文)答辩委员会意见错误!未定义书签。
重庆邮电大学移通学院毕业设计(论文)任务书设计(论文)题目火灾报警-CAN中继器的设计学生姓名赵文思系别自动化系专业电气自动化技术班级 1班指导教师杜李苹职称助教联系电话指导教师所在单位重庆邮电大学移通学院主要研究内容、方法和要求进度计1划主要参考文献指导教师签字:年月日教研室主任签字:年月日备注:此任务书于第一学期第十六周前各系发放给指导教师,指导教师填写完整后于下学期第一周内交回各系,由各系进行统计并组织学生于第二周进行选题,确定选题后,交至辅导员于第三周发放给学生。
毕业设计于第四周开始进行。
重庆邮电大学移通学院毕业设计 (论文)开题报告设计(论文)题目火灾报警—CAN中继器的设计学生姓名赵文思系别自动化系专业电气自动化技术班级 1班研究基本内容、拟解决的主要问题研究方法、步骤及措施研究进度计划学生意见学生签字年月日指导教师意见指导教师签字:年月日备注:此报告应根据下达的毕业设计(论文)任务书,在指导教师的指导下由学生独立撰写,并于毕业设计(论文)开始后一周内完成。
自动控制原理课程设计
自动控制原理课程设计课程编号j1630102课程名称自动控制原理课程设计学生姓名所在班级联系电话实施地点起止时间2012.12.24--2012.12.28指导教师职称副教授一、课程设计的意义:1.学习和掌握典型高阶系统动静态性能指标的测试方法。
2.分析典型高阶系统参数对系统稳定性和动静态性能的影响。
3.掌握典型系统的电路模拟和数字仿真研究方法。
二、课程设计的主要内容:典型三阶系统的结构方框图如图1所示:其开环传递函数为)1)(1()(21021++=S T S T S T K K S G ,本实验在此开环传递函数基础上做如下实验内容:1.典型三阶系统电路模拟研究;2.运用Simulink 对该典型三阶系统进行数字仿真研究。
; 3.分析比较电路模拟和数字仿真研究结果。
三、课程设计的实验步骤1、熟悉实验流程,设计并连接由一个积分环节和两个惯性环节组成的三阶闭环系统的模拟电路;2、利用Multisum 仿真模拟电路并观测的阶跃特性,并测出其超调量,调节时间和稳态误差;3、改变三阶系统模拟电路的参数,观测参数改变对系统稳定性与动态指标的影响。
4、调用上机软件Matlab 仿真程序,观测三阶系统模拟电路的阶跃特性,并测出其超调量,调节时间和稳态误差;5、改变三阶系统传递函数的参数,观测参数改变对系统稳定性与动态指标的影响。
6、完成三阶系统的动态性能研究,并与模拟电路的研究结果比较,分析实验结果。
四、课程实验数据记录图1 典型三阶系统结构方框图图1 典型三阶系统的结构方框图1、三阶系统模拟电路2、改变参数K的值观察三阶系统模拟电路的阶跃特性(1)(1)K=7.5, T0=1,T l=0.1, T2=0.5σ %=0.71, Ts=14.6s , ess=0 (2)K=10, T0=1,T l=0.1, T2=0.5σ %=0.848, Ts=28.4s , ess=0(3)K=12, T0=1,T l=0.1, T2=0.5σ %=0.98, Ts= 无法计算 , ess=不存在(4)K=15, T0=1,T l=0.1, T2=0.53、改变时间常数观察三阶系统模拟电路的阶跃特性(1)K =15,T0=0.55,T l=0.25,T2=0.25(2)K =15,T0=0.55,T l=0.25,T2=0.554、K=10,参数T0,T1,T2的值都减少(1)K =10,T 0=0.55,T l =0.25,T2=0.055σ %=0.838, Ts=16.5s , ess=05、设计的数字模型及数字仿真结果 仿真图:该系统开环传递函数为12120120121()(1)*()*()*()11(1)(1)K K K K G S T S T S T S T S T S T S =----=++++其中T 0=10u *100k=1S ;T 1=1u *100k=0.1S ;T 2=1u *500k=0.5S ;K 1=100k /100k=1;K 2=500/R x ;即)15.0)(11.0()1)(1()(21021++=++=S S S KS T S T S T K K S G 其中,K =500/R x ,R x 的单位为k。
自动控制原理毕业设计

自动控制原理毕业设计篇一:自动控制原理课程设计报告自动控制原理课程设计专业:设计题目:控制系统的综合设计班级:自动化0943学生姓名:XXX学号:指导教师:分院院长: XXX教研室主任: XX电气工程学院目录第一章课程设计内容与要求分析 ................................................ . (1)1.1设计内容................................................. ...................................................11.2 设计要求 ................................................ (1)1.3 Matlab软件 ................................................ . (2)1.3.1基本功能 ................................................ .. (2)1.3.2应用 ................................................ (3)第二章控制系统程序设计................................................. .. (4)2.1 校正装置计算方法................................................. (4)2.2 课程设计要求计算................................................. (4)第三章利用Matlab仿真软件进行辅助分析................................................. . (6)3.1校正系统的传递函数 ................................................ . (6)3.2用Matlab仿真 ................................................ . (6)3.3利用Matlab/Simulink求系统单位阶跃响应 (10)3.2.1原系统单位阶跃响应................................................. (10)3.2.2校正后系统单位阶跃响应................................................. .. (11)3.2.3校正前、后系统单位阶跃响应比较 ................................................123.4硬件设计................................................. . (13)3.4.1在计算机上运行出硬件仿真波形图 ................................................14课程设计心得体会 ................................................ . (16)参考文献 ................................................ ................................................... (18)第一章课程设计内容与要求分析1.1设计内容针对二阶系统W(s)?Ks(s?1),利用有源串联超前校正网络(如图所示)进行系统校正。
重庆邮电大学自动化学院自动控制原理课程设计报告柔性手臂控制详解

指导教师评定成绩:审定成绩:重庆邮电大学自动化学院自动控制原理课程设计报告设计题目:柔性手臂控制学院:自动化学院姓名:专业:班级:学号:指导教师:设计时间:2013年12月重庆邮电大学自动化学院制目录目录一、设计题目 (1)二、设计报告正文 (2)摘要 (2)(一)系统分析、建立数学模型 (3)1.1 物理量分析 (3)1.2数学模型的建立 (3)(二)系统性能分析 (4)2.1输出传递函数的分析 (4)2.2误差传递函数的分析 (7)(三)输出传递函数和误差传递函数的校正 (8)3.1 输出传递函数的校正 (8)3.2误差传递函数的校正 (10)三、设计总结 (11)四、参考文献 (12)一、设计题目传统的工业机器人为了保证可控性及刚度,机器臂作得比较粗大,为了降低质量,提高控制速度,可以采用柔性机器臂,为了使其响应又快又准,需要对其进行控制,已知m为球体,m=2KG,,绕重心的转动惯量T0=0.15,半径为0.04m,传动系统惯性矩I=1kg.m s2,传动比为5,;手臂为长L=0.2m,设手臂纵向弹性系数为E,截面惯性矩为I1,则E*I1=0.9KG/m2,设电机时间常数非常小,可以近似为比例环节(输入电压,输出为力矩),分析系统的性能,并校正。
图1、控制系统示意图二、设计报告正文摘要随着人类科技水平的不断进步,在人们生活以及工业生产等诸多领域经常涉及到机器人的使用。
传统的机器人为了保证可控性及刚度,机器臂作得比较粗大,将机器人视为刚体系统的分析与设计方法已显得愈加不适用。
而新一代机器人已向着高速化、精密化和轻型化的方向飞速发展,柔性机械臂作为柔性多体系统动力学分析与控制理论研究最直接的应用对象,由于其具有简明的物理模型以及易于计算机和实物模型试验实现的特点,已成为发展新一代机器人关键性课题。
与刚性机械臂相比较,柔性机械臂具有结构轻、操作灵活、性能稳定、载重自重比高等特性,因而具有较低的能耗、较大的操作空同和很高的效率,其响应快速而准确,有着很多潜在的优点。
自动控制理论课程设计(最终版)

专业电气工程及其自动化班级电力122学生XXX学号 XXXXXXXXXX 指导教师杨晓萍2014——2015 年 2 学期一、题目设计及要求题目037已知单位负反馈系统被控对象的传递函数为)2)(1()(0++=s s ks G ,试对系统进行串联校正设计。
使之满足:①相位裕量γ≥50°;②截止频率c ω保持不变;③稳态误差ss e =0.1.二、实验目的1、课程设计仿真环境MATLAB 软件为控制系统的设计与仿真提供了强有力的工具,使用该软件可提高控制系统的设计和分析水平。
因此本课程设计要求每一位学生掌握MATLAB 软件的使用方法,并将其用于自动控制系统地分析与设计中。
2、设计内容1)熟悉MATLAB 在经典控制系统分析中常用命令,进行控制系统地分析。
2)应用MATLAB 仿真软件进行控制系统辅助设计。
三、校正前分析由于题目没有说明稳态误差是在什么输入下产生的,这里设用单位阶跃输入进行计算。
单位阶跃输入时kk s s s s s s H s G ss sE s s s ss +=+++++=+==→→→22)2)(1()2)(1(lim 1)()(11lim )(lim e 00=0.1k=18此时开环传递函数为)2)(1(18)(0++=s s s G1.绘制闭环单位阶跃响应程序如下 num=18; den=[1,3,20];step(tf(num,den))%阶跃响应 运行结果超调量%σ=32.7、上升时间r T =0.307、调节时间s T =2.48、峰值时间p T =1.19, 0型系统的稳态误差ss e =)(lim 0s s sE →=18)2)(1()2)(1(lims +++++→s s s s =0.1Time (seconds)00.51 1.52 2.53 3.54 4.5程序如下 num=18; den=[1,3,2];rlocus(num,den)%求根轨迹 运行结果-2.5-2-1.5-1-0.500.5-0.8-0.6-0.4-0.200.20.40.60.8Root LocusReal Axis (seconds -1)I m a g i n a r y A x i s (s e c o n d s -1)程序如下 num=18; den=[1,3,2];nyquist(tf(num,den)) 运行结果由奈氏图知道N=0,系统稳定Nyquist DiagramReal AxisI m a g i n a r y A x i s-20246810-6-4-22464.绘制开环伯德图程序如下 num=[18]; den=[1,3,2]; G=tf(num,den); margin(G)[kg,pm,wg,wc]=margin(G) 运行结果kg=Inf pm=41.1085 wg=Infwc=3.9449即幅值裕量=kg=Inf>1,相位裕量为γ=41.1085°>0,原系统稳定。
重庆邮电大学移通学院毕业设计(论文)格式模板
毕 业 设 计 (论 文)设计(论文)题目:_______ ______________________________________________________单 位(系别):______________________ 学 生 姓 名:______________________ 专 业:______________________ 班 级:______________________ 学 号:______________________ 指 导 教 师:______________________ 答辩组负责人:______________________填表时间: 20 年 月 重庆邮电大学移通学院教务处制编 号:____________审定成绩:____________重庆邮电大学移通学院毕业设计(论文)任务书设计(论文)题目学生姓名系别专业班级指导教师职称联系电话教师单位下任务日期__ ____年____月____日ABSTRACTNetwork quality of service continuesrace forsubscribers. ……………….. ……………….【Key words 】GSM录12第一节移动通信系统发展历史及趋势 (2)一、发展历史 (2)二、 22 第二节GSM 3一、GSM 系统的基本特点 (3)二、 4 第三节 5 第二章GSM .6 第一节移动网络及优化 (6)第二节本章小结 (9)第三章GSM 网络覆盖优化 (10) (15)第四章GSM 无线网络切换性能优化 (30)第五章36 结论0 致谢 23 附 44471 四、源程序 (55)GSM 标准得到不断验证,而且稳步发展。
现在的核心问题就是数据通信,包括承载业务和115kbit/s 的分组交换数据业务,另外,GSM 将成为最复杂的移动电话系统——覆盖整个地球的卫星系统的基础。
GSM 正在不断进入新的应用领域,如开发微蜂窝、微微蜂窝基站,为室内商业环境提供无缝无线接入。
自动控制理论课程设计

一、课程设计的目的与要求本课程为《自动控制原理》的课程设计,是课堂的深化。
设置《自动控制原理》课程设计的目的是使MATLAB 成为学生的基本技能,熟悉MATLAB 这一解决具体工程问题的标准软件,能熟练地应用MATLAB 软件解决控制理论中的复杂和工程实际问题,并给以后的模糊控制理论、最优控制理论和多变量控制理论等奠定基础。
使相关专业的本科学生学会应用这一强大的工具,并掌握利用MATLAB 对控制理论内容进行分析和研究的技能,以达到加深对课堂上所讲内容理解的目的。
通过使用这一软件工具把学生从繁琐枯燥的计算负担中解脱出来,而把更多的精力用到思考本质问题和研究解决实际生产问题上去。
通过此次计算机辅助设计,学生应达到以下的基本要求: 1.能用MATLAB 软件分析复杂和实际的控制系统。
2.能用MATLAB 软件设计控制系统以满足具体的性能指标要求。
3.能灵活应用MATLAB 的CONTROL SYSTEM 工具箱和SIMULINK 仿真软件,分析系统的性能。
二、设计正文1.控制系统的数学建模相关知识:研究一个自动控制系统,单是分析系统的作用原理及其大致的运动过程是不够的,必须同时进行定量的分析,才能作到深入地研究并将其有效地应用到实际工程上去。
这就需要把输出输入之间的数学表达式找到,然后把它们归类,这样就可以定量地研究和分析控制系统了。
1.有理函数模型线性系统的传递函数模型可一般地表示为: mn a s a sa sb s b sb sb s G nn n n m m m m≥++⋅⋅⋅++++⋅⋅⋅++=--+- )(1111121 (1)将系统的分子和分母多项式的系数按降幂的方式以向量的形式输入给两个变量num 和den ,就可以轻易地将传递函数模型输入到MATLAB 环境中。
命令格式为:],,,,[121+⋅⋅⋅=m m b b b b num ; (2) ],,,,,1[121n n a a a a den -⋅⋅⋅=;(3)在MATLAB 控制系统工具箱中,定义了tf() 函数,它可由传递函数分子分母给出的变量构造出单个的传递函数对象。
自动控制原理课程设计
指导教师评定成绩:审定成绩:重庆邮电大学移通学院自动控制原理课程设计报告系部:学生姓名:专业:班级:学号:指导教师:设计时间: 2013 年 12月《自动控制原理》课程设计(简明)任务书——引言:《自动控制原理》课程设计是该课程的一个重要教学环节,既有别于毕业设计,更不同于课堂教学。
它主要是培养学生统筹运用自动控制原理课程中所学的理论知识,掌握反馈控制系统的基本理论和基本方法,对工程实际系统进行完整的全面分析和综合。
一、设计题目:I型二阶系统的典型分析与综合设计二、系统说明:该I型系统物理模拟结构如下图所示。
其中:R1=1MΩ;C1=1uF;R2=1MΩ; C2=0.2uF;R f为线性滑动电位器,可调范围为:10-4R1~10-1R1 。
设计过程中可忽略各种干扰,比如:运算放大器的零点漂移,环节间的负载效应,外界强力电力设备产生的电磁干扰等。
三、系统参量:系统输入信号:x(t);系统输出信号:y(t)。
四、设计指标:用串联校正的频率域方法对系统进行串联校正设计,使系统满足以下动态及静态性能指标:(1)在单位斜坡信号x(t)=t作用下,系统的稳态误差K v≥100;(2)开环截止频率30w;>cγ;(3)相位裕度︒>20c五、基本要求:建立系统数学模型——传递函数;◆利用频率特性法分析系统:+(1)根据要求的稳态品质指标,求系统的开环增益值;(2)根据求得的值,画出校正前系统的Bode图,并计算出幅值穿越频率、相位裕量,以检验性能指标是否满足要求。
若不满足要求,则进行系统校正。
◆利用频域特性法综合系统:画出串联校正结构图,分析并选择串联校正的类型(超前、滞后和滞后-超前校正);(1)确定校正装置传递函数的参数;(2)画出校正后的系统的Bode图,并校验系统性能指标。
若不满足,则重新确定校正装置的参数。
◆完成系统综合前后的有源物理模拟(验证)实验:实现校正前、后系统,并得到校正前后系统的阶跃响应。
重庆邮电大学移通学院课程设计
.供配电技术课程设计课题:重庆市某超市小区供电系统设计姓名:李文玉专业:电气工程及其自动化学号: 0511110506指导教师:徐辉重庆邮电大学移通学院本科学生课程设计任务书课程设计题目重庆市中区某超市小区供电系统设计5学院重庆邮电大学移通学院专业电气工程及其自动化年级2011已知参数和设计要求:小区供电系统如附录图,已知电力系统出口处的短路容量在系统最大运行方式下为S K=200MV.A.试求图中标注处短路时相关短路电流并列出短路计算表。
已知有一电机负荷30kw,cosφ=0.80距低压配电柜50m.试选择电机用电缆。
设低压母线长度6m.要求:1 选择高压断路器并校验。
2 选择高压限流熔断器(保护变压器用)。
3 选择低压断路器(进、出线)并校验。
4 选择高压电流互感器并校验。
5 选择母线规格并校验。
6本设计、计算、报告、图纸打印采用A4纸,设计任务书放在第一页。
学生应完成的工作:1提交课程设计说明书一份。
内容包括系统设计说明,详细计算过程,设备选型材料计算。
2参考教科书相关部分画出相关表格3 阅读相关资料3篇,写出课程设计心得体会。
当前资料收集情况(含指定参考资料):1、供电工程第2版主编:翁双安2、民用建筑电气设计规范 JGJ/T75-19943、建筑电气设备手册(上下)4、刘介才主编. 工厂供电简明设计手册. 北京: 机械工业出版社, 19935、刘介才主编. 供电工程师技术手册. 北京: 机械工业出版社, 1998课程设计的工作计划:1下达任务书、提出要求。
--------0.5天2 理论计算、绘制图表。
--------- 3.0天3 论文写作----------------------4.0天4 打印设计书、出图。
------------0.5天任务下达日期 2014 年 6 月日完成日期 2014年 6月日指导教师(签名)学生(签名)说明:1、学院、专业、年级均填全称,如:光电工程学院、测控技术、2003。
自动控制原理课程设计
自动控制原理课程设计一、设计目的:(1) 掌握用频域法对系统进行超前串联设计校正的方法。
(2)学会用Matlab 进行系统仿真,进一步掌握Matlab 的使用。
二、设计要求:已知单位反馈水箱流量控制系统,系统的开环传递函数为()(0.11)(0.0011)o k G s s s =++, 试用Bode 图设计法对系统进行超前串联校正设计,使系统满足:(1)系统在单位斜坡信号作用下,系统的稳态误差0.001ss e ≤(2)系统校正后,系统的相角裕量4050γ≤≤三、设计思想:在设计、分析控制系统时,最常用的方法是频率法。
应用频率法对系统进行校正,其目的是改变频率特性的形状,使校正后的系统的频率特性具有合适的低频、中频和高频特性及足够的稳态裕量,从而满足系统所要求的性能指标。
频率法设计校正装置主要是通过对数频率特性(Bode 图)来进行。
开环对数频率特性的低频段决定系统的稳态误差,根据稳态性能指标确定低频段的斜率和高度。
为保证系统具有足够的稳态裕量,开环对数频率特性在剪切频率c ω附近的斜率应为20/dB dec -,而且应具有足够的中频宽度。
为抑制高频干扰的影响,高频段应尽可能迅速衰减 。
频率法进行校正设计时,常采用分析法和综合法。
分析法也称为试探法,该方法首先分析原系统的动态和静态特性,同时考虑系统性能指标要求,装置形式,然后确定校正装置参数,最后校验性能指标,如果满足要求,设计完成。
如不满足,重新选择参数,再设计。
综合法是根据系统性能指标的要求,确定系统期望的对数幅频特性,再和原系统特性相比较,确定校正方式、校正装置形式和参数。
本设计是为了完成对水箱流量控制系统校正装置的设计,有题目所给出的稳态误差及相角裕量的要求,又要求用超前校正网络装置来完成设计要求。
而串联超前校正正是利用超前校正网络的正相角来增加系统的相角裕量,以改善系统的动态特性。
因此,校正时应使校正装置的最大超前相角出现在系统的开环剪切频率处。
PLC课程设计重庆邮电大学移通学院
成绩 _______重庆邮电大学移通学院自动化系可编程逻辑控制器课程设计报告题目全自动洗衣机的PLC控制系别自动化系专业名称电气工程与自动化班级 051315202学号 2012212732姓名何凯祥指导教师于群重庆邮电大学移通学院自动化系制2015年 6月目录摘要 (2)《可编程逻辑控制器》课程设计任务书 (3)全自动洗衣机的PLC控制 (3)1、概述 (3)2、设计任务和要求 (3)3、设计方案提示 (4)一、绪论 (6)1、设计目的 (6)2、设计内容 (7)3、要实现的目标 (7)二、系统分析及硬件设计 (8)1、系统工作说明 (8)2、系统I/O分配 (8)3、PLC外围接线 (10)三、系统软件设计 (11)1、系统流程图 (11)2、系统程序设计 (12)总结 (16)参考文献 (16)附录 (18)一、语句表 (18)二、其他图表 (20)摘要随着科学技术不断进步和社会飞速发展,洗衣机成为人民日常生活息息相关的家用电器产品。
洗衣机的全自动化、多功能化、智能化是其发展方向。
本文首先介绍了洗衣机的发展,然后重点介绍了洗衣机的设计,对程序流程图及编程软件进行了说明,最后对系统进行了仿真。
本次设计采用步进顺控指令编程,根据工艺要求编程简单、可允许双线圈使用,PLC采样按钮及限位开关外部输入信号的变化,执行相应的程序,然后输出控制电机正反转及脱水处理。
最后就本课题所做的工作进行了总结,并对进一步的研究提出了自己的看法。
本次设计的全自动洗衣机工艺要求有待改善,不可以单独脱水及洗衣时间的设置;由于时间有限,没做进一步的改善。
基于全自动洗衣机在日常生活中广泛运用,本设计具有广泛的推广价值。
With the continuous progress of science and technology and the rapid development of society, washing into people's everyday life, household products. Fully automatic washing machines, multi-functional and intelligent direction of its development. This paper describes the development of washing machines, washing machine and then focuses on the design and programming software, the program flow chart are described, and finally the system is simulated. The design uses a step sequence programming instructions, according to process requirements of simple programming, which allows dual coils, PLC sampling buttons and limit switch changes the external input signal, perform the appropriate procedure, and then reversing the motor output control and dehydration treatment.关键词:洗衣机全自动化智能化 PLC《可编程逻辑控制器》课程设计任务书——供级电气工程及其自动化专业学生用引言:《可编程逻辑控制器》课程设计是该课程的一个重要教学环节,既有别于毕业设计,又不同于课堂教学。
自动控制原理课程设计
目录一、绪论 (1)二、原系统分析 (1)2.1原系统的单位阶跃响应曲线 (2)2.2 原系统的Bode图 (2)2.3 原系统的Nyquist曲线 (3)2.4 原系统的根轨迹 (3)三、校正装置设计 (4)3.1 校正装置参数的确定 (4)3.2 校正装置的Bode图 (4)四、校正后系统的分析 (4)4.1校正后系统的单位阶跃响应曲线 (5)4.2 校正后系统的Bode图 (5)4.3 校正后系统的Nyquist曲线 (5)4.4 校正后系统的根轨迹 (6)五.总结 (6)六. 参考文献 (6)七、附图 (7)一、绪论在科技日益进步的今天,随着电子计算机技术的应用和发展,在众多高新技术领域中,自动控制技术具有特别重要的作用。
自动控制技术的研究有利于将人类从复杂、危险、繁琐的劳动环境中解放出来并大大提高控制效率。
自动控制是指在没有人直接参与的情况下,利用外加的设备或装置,使机器,设备或生产过程的某个工作状态或参数自动地按照预定的规律运行。
本次课程设计采用串联超前校正装置来对已有系统进行校正。
串联超前校正的实质是利用超前网络或PD 控制器的相位超前特性,只要正确地将超前网络的交接频率1/aT 和1/T 选在待校正系统截止频率的两旁,并适当选择a 和T ,就可以使已经校正系统的截止频率和相角裕度满足性能指标的要求,从而改善闭环系统的动态性能。
闭环系统的稳态性能要求,可通过选择已校正系统的开环增益来保证。
当系统稳态性能较好而动态性能不符合要求时,可采用超前校正。
超前校正的特点是:主要对未校正系统的中频段进行校正,使校正后的中频区斜率为—20dB/dec ,且有足够大的相角裕度,动态过程超调量下降。
超前校正会使系统的响应速度变快,带宽增大,但是系统抗高频噪声的能力变差。
有些情况下采用串联超前校正是无效的,它受到以下两个因素的限制: 1.闭环宽带要求。
若待校正系统不稳定的话,为了得到规定的相角裕度,需要超前网络提供很大的相角超前量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实用文档成绩 _______重庆邮电大学移通学院自动化系自动控制原理课程设计报告题目Ⅰ型三阶系统的典型分析与综合设计系别自动化系专业名称电气工程与自动化班级学号姓名孙猜胜指导教师重庆邮电大学移通学院自动化系制2014 年 12 月摘要在控制系统中,对于一个设计者来说,在进行控制系统校正之前,首先应确信已对被控对象进行了尽可能的改善,即通过调整控制器的各项参数仍然无法满足系统性能指标的要求。
这时必须在系统中引入一些附加装置来改善系统的稳态和瞬态性能,使其全面满足性能指标要求。
本次课程设计研究的是Ⅰ型三阶系统,要求满足给定的期望指标。
对于这个系统,需要在频域中建立原系统的数学模型。
根据传递函数进行绘制bode图,从图中得出不满足各项指标时,则通过期望的指标设计出bode图,得到校正装置的传递函数,从而得到校正后的传递函数。
然后需Simulink仿真看是否达到所希望的指标,以及设计出校正后的系统模拟图,通过实验里的设备搭建实物电路,在输入阶跃响应时,观察示波器上波形,并进行与仿真对照。
本系统单纯采用超前校正或滞后校正均只能改善系统暂态或稳态一个方面的性能,并且要求的性能都比较高,宜采用了串联滞后-超前校正装置。
【关键字】校正性能指标校正装置AbstractIn the control system, for a designer, before adjustment for control system, First, the accused should have been identified for possible improvement of the object, by adjusting the parameters of the controller is still unable to meet the requirements of system performance index.Then you must introduce some additional devices in the system to improve steady-state and transient performance of the system, so that,It fully meet the performance requirements.The curriculum design is the study of the Ⅰ third-order system, Required to meet the expectations of a given index.For this system, Need to establish a mathematical model of the original system in the frequency domain. Bode charting based on transfer function,When the results from the figure does not meet the targets, by the desired index designed bode diagram, get the calibration device of transfer function, thereby obtaining the transfer function of the corrected.You then need to see if the Simulink simulation to achieve the desired targets, and design a correction after system simulation diagram, Build physical circuit through experiment equipment, When entering the step response, observed on an oscilloscope waveform, and control and simulation.The system uses a simple correction or lag correction ahead are transient or steady-state system can only improve one aspect of performance, And performance requirements are high, should adopt a series lag - lead correction device.Keywords: correction performance index correcting device目录《自动控制原理》课程设计(简明)任务书 (6)一、系统说明(概述) (7)1.1.设计目的 (7)1.2.系统原理(简介) (7)1.3.各环节的性能、功能特性说明 (7)1.4.设计基本要求 (8)1.5.设计指标 (8)二、系统建模 (9)2.1.各个环节模型 (9)2.2 原系统方框图 (10)2.3.系统模拟电路图 (11)三、系统分析 (12)3.1. 稳定性分析 (12)3.2.频域分析 (12)3.3.MATLAB绘制原系统bode图 (13)3.4绘制原系统bode图(手绘) (13)四、系统综合 (14)4.1.利用期望指标绘制Bode图 (手绘) (14)4.2.确定参考模型 (14)4.3 验算是否满足性能指标 (16)4.4校正装置的选取 (16)4.5.校正装置 (18)4.6.参数的选择 (18)4.7.系统综合过程表达(Bode图上) (18)五、系统物理模拟图 (20)5.1.原系统模拟图 (20)5.2.原系统单位阶跃响应曲线 (20)5.3.综合后系统模拟图 (21)5.4.综合后系统的单位阶跃响应曲线 (21)5.6Simulink仿真 (22)六、实验室模拟 (23)6.1.原系统阶跃响应 (23)6.2.校正系统阶跃响应 (23)七、总结 (24)7.1课程总结 (24)7.2心得体会 (24)参考文献: (25)《自动控制原理》课程设计(简明)任务书一、 设计题目:I型三阶系统的典型分析与综合设计二、 系统说明: 设单位反馈系统开环传递函数为0()(10.1)(10.02)k G S s s s =++,试设计串联校正装置,使系统满足70,1,%40%V s K t σ≥≤≤三、 基本要求:1.用频率法分析系统:(1) 作原系统的Bode 图;(2) 分析原系统的性能,当原系统的性能不满足设计要求时,则进行系统校正。
2.利用频率法综合系统:(1)画出串联校正结构图,分析并选择串联校正的类型(微分、积分或微分-积分校正);(2)确定校正装置传递函数的参数;(3)画出校正后的系统的Bode 图,并校验系统性能;若不满足,则重新确定校正装置的参数。
(4)完成系统综合前后的有源物理模拟(验证)实验;四、 课程设计报告:(1)课程设计计算说明书一份;(2)原系统组成结构原理图一张(自绘);(3)系统分析,综合用bode 图一张;(4)系统综合前后的模拟图各一张(附实验结果图);(5)封面装帧成册;指导教师:马冬梅2014-12-12一、系统说明(概述)1.1.设计目的(1)掌握自动控制原理课程中所学的理论知识,提高分析和解决问题能力(2)掌握反馈系统的基本理论和方法,对工程系统进行进行全面分析(3)掌握控制系统的设计与校正方法(4)掌握使用mathtype,visio,matlab中的Simulink的使用方法1.2.系统原理(简介)开环传递函数:0(S)S(1+0.1S)(1+0.02S)KG该传递函数可由一个积分环节、两个惯性环节组成。
方块图:图1-1Ⅰ型三阶系统的方框图1.3.各环节的性能、功能特性说明(1)比较环节将输入信号与输出反馈回的信号进行比较,以改善放大器的静态和动态性能;(2)积分环节输出量与输入量成积分关系的环节,称为积分环节。
特点:输出量与输入量的积分成正比例,当输入消失,输出保持不变,具有记忆功能;积分环节受到扰动自身无法达到稳定。
(3)惯性环节一阶惯性环节的微分方程是一阶的,且输出响应需要一定时间后才能达到稳态值,因此称为一阶惯性环节。
特点:输出信号对输入信号的响应存在惯性(输入信号阶跃加入后,输出信号不能突然变化,只能随时间增加逐渐变化)。
(4)反馈环节:根据输入与输出在广义上是否相等来调节系统使之误差减小。
1.4.设计基本要求1.利用频率法分析系统:(1)作原系统的Bode 图;(2)分析原系统性能,当原系统的性能不满足设计要求时,则进行系统校正。
2、利用频率法综合系统:(1)画出串联校正结构图,分析并选择串联校正的类型(微分、积分或微分-积分校正);(2)确定校正装置传递函数的参数;(3)画出校正后的系统的Bode 图,并校验系统性能;若不满足,则重新确定校正装置的参数。
3、完成系统综合前后的有源物理模拟(验证)实验;1.5.设计指标用串联校正的频率域方法对系统进行串联校正设计,使系统满足以下动态及静态性能指标:静态速度误差系数:v 70K ≥ ;调节时间:s t 1≤ ;超调量:σ%40≤% ;二、系统建模2.1.各个环节模型(1)比较器图 2-1比较器(2)积分环节C图 2-2 积分模拟图结构方框图:图2-3输入:0(s)U输出:1(s)U)(1s X 输入:)(s Y 输出:)()()(21s X s X s Y -=11011U G U C RS S==-=- (3)惯性环节图2-4 惯性环节模拟图结构方框图:图2-5输入:1U 输出:2U22f12121/R 11110.1f U K R G U T s R CS S====+++ 同理第三个也是一阶惯性环节,传递函数为:21333232\R 11110.02f f R U K G U T S R CS S====+++2.2 原系统方框图图2-6 原系统方框图简化框图:图2-7单位闭环传递函数框图2.3.系统模拟电路图图2-8 原系统物理模拟图三、系统分析3.1. 稳定性分析闭环传递函数:32(s)(10.1S)(10.02S)K 0.0020.12K KG S S S S K==++++++特征方程:32(s)0.0020.12D S S S K =+++ 根据劳斯判据:30.002120.120.120.00210.120S S K KS S K-即:0.120.00200.12K-≥0K ≥求得:60K ≤ 即当60K ≤系统才稳定。