NBU物理带库机械手配置方法(AIX)
NBU设备管理之AIX篇

NBU设备管理之AIX篇在备份软件的使用过程中,对于磁盘、磁带的管理一般会花费存储管理员很大比例的时间和精力。
因此,对于设备的管理的方便程度,是衡量一个备份软件好坏的重要的标准。
NBU作为业界最为知名的备份软件之一,能够为用户提供最为方便的设备管理操作。
虽然NBU在不同的操作系统上提供了统一的管理界面,但是由于操作系统的差异,使得系统管理员不得不自己配置新购置的磁盘阵列和磁带库,使得其能够被NBU识别和有效利用。
本文介绍的重点在AIX上面的设备管理,使得NBU可以能够正确的识别AIX操作系统上的磁盘阵列、机械手和磁带库等设备。
具体的NBU中如何使用已经识别的设备的内容,在各个操作系统是没有差异的,它们将会在后面的文章中予以介绍。
一,检查NBU软件的兼容性列表用户在配置设备时,第一需要注意的事情是检查该软件的兼容性列表,检查该软件是否支持用户当前正在使用的操作系统版本和磁盘、磁带等设备。
一般来说,使用主流的操作系统和应用广泛的设备,都不会有什么问题。
但是如果用户使用的是比较特殊的应用环境,那么就需要提前检查一下兼容性列表了,以免在使用过程中出现错误,一般来说这种错误都不容易诊断出来。
二,NBU驱动的安装NBU是操作系统之上运行的软件,那么如果用户需要利用NBU来管理存储设备、保存备份信息,那么就需要首先确保操作系统能够正确的识别相应的存储设备。
笔者在论坛上经常看到有人询问关于存储设备无法使用的故障,其实都是由于光纤/SCSI网络的损坏导致操作系统无法正常使用引起的。
为了简化各个操作系统管理存储设备的差异,NBU在不同操作系统的/usr/openv/volmgr/bin/driver目录下分别放置了针对该平台的设备驱动程序,能够发送SCSI PASSTHRU命令来管理设备。
该驱动程序可以有效的增强备份环境的性能。
在AIX 环境中NBU使用的SCSI PASSTHRU驱动程序叫ovpass,用户可以在/usr/openv/volmgr/bin/driver目录下看到其相关的内容。
机械手操作指导

机械手操作指导机械手在安装后,AAC已经对内部参数进行了必要的设定,在以后的使用中,只需要更改程序的位置和I/O,就可以适应不同的模具进行生产。
新装的机械手中使用:1.开机打开机械手的电源开关(主电源开关行程为90度),机械手会自动启动,进入机械手控制程序,这时可以在手动页面或选项页面打开机械手的伺服电源2.校零机械手在启动后,需要确认各个轴的零点位置。
当机械手的伺服电源打开后,在手动页面或选项页面按下校零按钮,机械手自动执行校零程序,当校零完成时,机械手会发出警报提示操作者机械手已经完成校零。
3.编程机械手在重新开电校零后,无论是使用以前的程序还是要编新的程序,操作者都要重新确认每一步的位置。
操作者根据生产的需求,在编程前先构思程序的整个流程(六个工序的具体位置,I/O的控制),然后在设置菜单中添加或删除图标。
在程序编完后,重新检查程序的每一步的位置和I/O以防止因粗心而造成的失误。
机械手的程序主要分为六步工序,分别是:准备工序(Prestage)、取出工序(Tackout)、卸货工序(Unload)、丢弃工序(Reject)、复位工序(Home1,Home2)准备工序:机械手做一些注塑前的准备工作,如从工作台拾取Label,拾取螺钉,以便于在取出工序中将其放入模内注塑.取出工序:将产品和水口从模具内取出,有时也会放一些Insert在模内.卸货工序:将产品放到传送带或采用托盘程序将产品直接装箱.丢弃工序:机械手可以根据SPI信号和本机的设定来执行丢弃工序,将不合格的产品放到废品箱,以便于同良品分开.复位工序:复位工序包括模内复位工序(Home1)、模外复位工序(home2).在按下READY 按钮后,机械手会根据设定的Tie bar值来判断机械手是执行模内复位工序还是模外复位工序.这两个工序确保机械手无论处于何地,都能安全的回到准备位置,开始下一轮全自动生产.4.生产确保机械手同注塑机联机,在编程完成后,就可以进入自动菜单运行全自动生产。
IAI机械手手册

1.前言打招呼由我和我为你服务多谢您购买本公司产品。
SA系列产品使用容易.体积小,可以自在控制传动装置与外围设备。
除此之外,使用SEL语言还可实现简单的高度控制梦想。
请仔细详读『操作说明书』。
2.安全上的应注意事项请详读下列内容,充分留意安全对策。
本产品以自动化机械等的驱动零组件开发而成,因此在自动化机器驱动源的转矩或速度方面,有请勿超乎标准以外的限制。
为了防止发生事故,请严守下列事项。
并请务必参照「安全规则」。
1.本书没有记载的操作方法,原则上请以「不可操作」解释。
对于本书内容如有不明之处,请与本公司联络。
2.传动装置与控制器之间的配线,请务必使用指定之正品。
3.当机械在运动状态,或者可运动状态(打开控制器电源状态)时,请勿站立在机械的运动范围。
另外也请在周围设置栅栏,以防止外人接近机械。
4.执行机械之安装调整作业,或者维修检查作业时,请务必关闭控制器电源。
并请将「作业中」铭板放置在明显的场所。
另外,请勿缠绕电线,也避免插入来路不明的电源插座里。
5.当复数人同时作业时,必须采取一个对应方法,以确认彼此安全作业。
特别是不论开.关电源,或驱动.手动马达等移动轴的作业,都必须发出声音确定安全后再进行作业。
6.当使用者(客户)需要延长配线时,因错误配线有可能会导致错误动作,因此请充分检查配线后,并确认正确配线方式后再打开电源。
附录「安全规则」关于产业用自动装置安全的JIS规格----「产业用自动装置之安全通则」(JIS B8433)于1983年3月1日制定,另外由劳动省于同年7月1日修改一部分的「劳动安全卫生规则」,以实施产业用自动装置之定义或,安全对策等规则。
在此所介绍的是,参考「劳动安全卫生规则」之产业用自动装置安全对策上的重要规则。
●特别教育(第36条第31号,第32号)第36条第31号操纵装置及记忆装置(包含可变序列控制装置及固定序列控制装置。
),以记忆装置信息为基础之操纵装置之伸缩.屈伸.上下移动.左右移动,或者旋转动作或复合动作等,均可自动执行之机械(除了研究开发中之其它劳动大臣所制定之装置以外。
工业用机器人的配置及调试方法

工业用机器人的配置及调试方法1. 引言工业用机器人在现代制造业中扮演着重要的角色。
为了确保机器人能够正常运行并达到预期的性能,正确的配置和调试方法是至关重要的。
本文将介绍工业用机器人的配置和调试方法,帮助您顺利完成机器人的部署和调试工作。
2. 配置方法2.1 硬件配置工业用机器人的硬件配置包括选择适当的机器人型号、安装工作站、连接传感器和执行器等。
在进行硬件配置时,应考虑以下几个方面:- 机器人型号:根据实际需求选择适当的机器人型号,包括机械臂的长度、负载能力等参数。
- 工作站安装:将工作站安装在合适的位置,确保机器人可以自由移动而不受限制。
- 传感器和执行器连接:根据需要连接传感器和执行器,如视觉传感器、力传感器等,以提供更精确的控制和反馈。
2.2 软件配置工业用机器人的软件配置包括安装和设置机器人控制系统、编写机器人控制程序等。
在进行软件配置时,应注意以下几点:- 机器人控制系统安装:根据机器人型号和厂商提供的指南,正确安装机器人控制系统,并进行初始化设置。
- 控制程序编写:根据实际需求编写机器人的控制程序,包括轨迹规划、碰撞检测等功能,以实现所需的工作任务。
3. 调试方法3.1 硬件调试在完成机器人的配置后,需要进行硬件调试以确保机器人能够正常工作。
硬件调试的主要步骤包括:- 运动测试:通过控制机器人执行简单的运动任务,如抓取物体、移动到指定位置等,检查机器人的运动是否正常。
- 传感器测试:测试连接的传感器是否能够正常工作,并获取准确的反馈数据。
- 执行器测试:测试执行器的性能和准确性,如执行器的速度、负载能力等。
3.2 软件调试软件调试是确保机器人控制程序正确运行的关键步骤。
以下是软件调试的一些常见方法:- 轨迹规划调试:检查机器人的轨迹规划算法是否正确,并进行必要的调整以实现精确的运动控制。
- 碰撞检测调试:测试机器人的碰撞检测功能,确保机器人在遇到障碍物时能够正确停止或避开。
- 控制程序逻辑调试:通过对控制程序的逻辑进行测试和调试,确保机器人能够按照预期执行各项任务。
机械手操作说明书

操作说明机械手 操 作 说 明 书操作说明一, 简介:本设备主体部包括以下机构: 1, 上下伺服机械臂:1.5KW 三菱伺服;气动抓胎器;横走气缸; 2, 输送线:400W 三菱变频器及电机两台;检测用对射光电;定中气缸; 3,主要电气部件品牌及明细表:主要电气部件明细:序号 材料名称 1 PLC 2 触摸屏 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 伺服电机 伺服驱动器 输送电机用变频器 三相智能伺服变压器 开关电源 小型断路器 小型断路器 小型断路器 小型断路器 交流接触器 接近开关 电源滤波器 继电器 继电器端子座 超声波传感器 对射光电 材料规格 FX3U-48MT-001 DOP-B05S100 HF-SP152B MR-J3-200A FR-E740-0.4-CHT IST-C-045 NES-150-24 DZ47-60/3P/D16A DZ47-60/2P/D6A DZ47-60/2P/D10A DZ47-60/3P/D25A LC1-D1810M5C RN05-N(17*17) 3 米 PNF221-G-2A RJ2S-CL-D24 RJ2S-05B UB800-18GM40-E4-V1 PZ-G52N 用量 1 1 1 1 2 1 1 1 1 2 2 1 5 1 8 8 1 4 单位 台 个 品牌 三菱 台达 三菱 三菱 三菱 三诺科技 台湾明纬 正泰 正泰 正泰 正泰 施耐德 台湾 RIKO 埃德 idec idec 倍加福 基恩士台 台 台台 台 个 个 个 个 个 个 个 个 个 个 对二, 操作说明: 2.1 操作前注意事项:机械手运行范围内不要有人员站立. 确认抓手用输入气源是否打开且压力达到 0.5MPa 及以上。
2.2 操作说明:2.2.1,简要说明:操作说明1,本系统人机操作画面,支持中英文两种语言方式。
操作者可以在进入系统后的初 始开机画面,选择指定的操作语言。
机械手实用操作教材

一、机械手自动运行、生产1、检查压缩空气气压。
(如图1-1-1)图1-1-1机械手进口压力要求大于0.6MPa。
2、检查、确认无人处于机械手周围的防护区内。
3、确认主电源开关处于打开状态。
(如图1-3-1)图1-3-14、将操作模式选择器置于手动减速模式。
(如图1-4-1)图1-4-15、操作并确认机械手处于homepos。
具体操作见“五、机械手回原点”。
6、确认转台控制柜电源开关处于打开状态,模式选择为“手动”。
7、 打开程序窗口,调入喷涂程序。
① 打开程序窗口,按下File 菜单并选择 1 Open ...选项。
(如图1-7-1)图1-7-1② 按照所需用喷涂程序的路径查找程序。
(如图1-7-2)图1-7-2 ③ 调入程序。
将光标移至将要运行的程序上,按OK 功能键或回车键调入程序。
(如图1-7-3)图1-7-38、 将操作模式选择器置于自动模式。
(如图1-8-1)程序运行指针(PP )图1-8-19、示教器显示屏出现自动生产确认信息。
(如图1-9-1)图1-9-110、按下OK功能键进入生产窗口。
(如图1-10-1)图1-10-111、按下控制面板上的“MOTOR ON”按钮,令马达上电。
(如图1-11-1)图1-11-112、按下Start功能键开始运行程序。
13、等待机械手将一些先前程序及初始数据加载完毕,确定有无任何错误信息跳出。
(如图1-13-1)图1-13-1如有错误信息跳出,先将操作模式选择器置于手动减速模式,然后重新从第4步开始。
二、生产过程中喷涂的流量、雾化、扇面的调节1、打开生产信息界面。
(如图1-13-1)①在自动状态下生产,开始运行程序后,自动跳入生产信息界面。
如“一、机械手自动运行、生产”中第13步所示。
②当前窗口未在其它窗口,或是当前窗口为其它窗口,但未在生产信息界面时。
按下键打开其它窗口,并将光标移至Production,按回车键进入生产信息界面。
(如图2-1-1)图2-1-12、按下Paint菜单,选择 2 Brush Factors ...选项。
NBU_AIX安装配置手册
NBU_AIX安装配置⼿册NBU for AIX安装配置⼿册Service Delivery Center 2011年5⽉23⽇Document Control⽬录安装篇 (4)⼀、NBU客户端安装配置 (4)配置篇 (7)⼀、NBU 客户端脚本配置 (7)⼆、NBU⽬录库备份设置 (15)三、NBU oracle备份作业设置 (19)安装篇⼀、NBU客户端安装配置1、先设置客户端的hosts⽂件,包括备份服务器的hosts也要对应双向解析。
training:/#vi /etc/hosts 127.0.0.1 loopback localhost # loopback (lo0) name/addres s192.168.88.17 training #NBU Client--local192.168.88.57 p57192.168.88.58 ibm58192.168.88.68 NBUTEST #NBU Server2、解压安装程序3、执⾏安装,输⼊NBU服务器主机名安装结束后⾃动退出4、修改客户端oracle数据库为归档模式training:/home/oradev#su - oracletraining:/home/oradev#sqlplus "/as sysdba"SQL*Plus: Release 10.2.0.4.0 - Production on Fri Feb 25 15:48:48 2011 Copyright (c) 1982, 2007, Oracle. All Rights Reserved.Connected to:Oracle Database 10g Enterprise Edition Release 10.2.0.4.0 - 64bit Production With the Partitioning, OLAP, Data Mining and Real Application Testing options SQL> archive log list;Database log mode No Archive ModeAutomatic archival DisabledArchive destination USE_DB_RECOVERY_FILE_DESTOldest online log sequence 7Next log sequence to archive 9Current log sequence 9SQL> shutdown immediateDatabase closed.Database dismounted.ORACLE instance shut down.SQL> startup mount;ORACLE instance started.Total System Global Area 1610612736 bytesFixed Size 2084400 bytesVariable Size 436208080 bytesDatabase Buffers 1157627904 bytesRedo Buffers 14692352 bytesDatabase mounted.SQL> alter database archivelog;Database altered.SQL> alter database open;Database altered.SQL> archive log list;Database log mode Archive ModeAutomatic archival EnabledArchive destination USE_DB_RECOVERY_FILE_DESTOldest online log sequence 7Next log sequence to archive 9Current log sequence 9SQL> create pfile from spfile;File created.5、oracle⽤户执⾏备份软件NBU和oracle数据库连接库程序oracle_link training:/#su - oracle training:/home/oradev#cd /usr/openv/netbackup/bintraining:/usr/openv/netbackup/bin#./oracle_link配置篇⼀、NBU 客户端脚本配置1、先创建相关⽬录和⽂件training:/#cd /usr/openvtraining:/usr/openv#mkdir controlfiletraining:/usr/openv#mkdir orascriptstraining:/usr/openv#cd controlfiletraining:/usr/openv#touch control.oratraining:/usr/openv/controlfile#cd ..training:/usr/openv#cd orascriptstraining:/usr/openv/orascripts#touch ora_full.sh2、相关⽬录和⽂件赋予属主和权限training:/usr/openv/orascripts#cd ..training:/usr/openv#ls -lrttotal 80drwxr-xr-x 2 root bin 256 Jan 05 2010 share-r--r--r-- 1 root bin 5435 Jan 05 2010 swidtag.xmldrwxr-xr-x 2 root bin 256 Jan 05 2010 msgdrwxr-xr-x 2 root bin 4096 Jan 05 2010 resourcesdrwxr-xr-x 5 root bin 256 May 23 14:09 vardrwxr-xr-x 7 root bin 8192 May 23 14:10 libdrwxr-xr-x 5 root bin 4096 May 23 14:14 javadrwxr-xr-x 9 root bin 4096 May 23 14:14 netbackup-r--r--r-- 1 root bin 5435 May 23 14:15 /doc/8da9755e48d7c1c709a14503.html .symantec,Enterprise_netbackup-7.0.0.0_2.swidtagdrwxr-xr-x 15 root system 4096 May 23 14:15 logsdrwxr-xr-x 2 root bin 256 May 23 14:16 tmpdrwxr-xr-x 2 root system 256 May 23 14:35 controlfiledrwxr-xr-x 2 root system 256 May 23 14:36 orascripts training:/usr/openv# chown -R oradev:dba controlfiletraining:/usr/openv# chmod -R 777 controlfiletraining:/usr/openv# chown -R oradev:dba orascriptstraining:/usr/openv# chmod -R 777 orascriptstraining:/usr/openv#ls -lrttotal 80drwxr-xr-x 2 root bin 256 Jan 05 2010 share-r--r--r-- 1 root bin 5435 Jan 05 2010 swidtag.xmldrwxr-xr-x 2 root bin 256 Jan 05 2010 msgdrwxr-xr-x 2 root bin 4096 Jan 05 2010 resourcesdrwxr-xr-x 5 root bin 256 May 23 14:09 vardrwxr-xr-x 7 root bin 8192 May 23 14:10 libdrwxr-xr-x 5 root bin 4096 May 23 14:14 javadrwxr-xr-x 9 root bin 4096 May 23 14:14 netbackup-r--r--r-- 1 root bin 5435 May 23 14:15/doc/8da9755e48d7c1c709a14503.html .symantec,Enterprise_netbackup-7.0.0.0_2.swidtagdrwxr-xr-x 15 root system 4096 May 23 14:15 logsdrwxr-xr-x 2 root bin 256 May 23 14:16 tmpdrwxrwxrwx 2 oradev dba 256 May 23 14:35 controlfile drwxrwxrwx 2 oradev dba 256 May 23 14:36 orascripts3、编辑NBU备份数据库的rman脚本ora_full.shtraining:/usr/openv/orascripts#vi ora_full.sh粘贴如下内容(完全备份oracle数据库和归档⽇志,并删除备份好的归档⽇志,注意修改实例名oracle_sid和oracle_home和实际环境⼀致)=================================================================#!/bin/sh# $Header: hot_database_backup.sh,v 1.9 2002/02/06 16:48:56 lstrub Stab $##bcpyrght#******************************************************************** *******#* $VRTScprght: Copyright 1993 - 2002 VERITAS Software Corporation, All Rights Reserved $ *#******************************************************************** *******#ecpyrght## ---------------------------------------------------------------------------# hot_database_backup.sh# ---------------------------------------------------------------------------# This script uses Recovery Manager to take a hot (inconsistent) database# backup. A hot backup is inconsistent because portions of the database are# being modified and written to the disk while the backup is progressing.# You must run your database in ARCHIVELOG mode to make hot backups. It is# assumed that this script will be executed by user root. In order for RMAN# to work properly we switch user (su -) to the oracle dba account before# execution. If this script runs under a user account that has Oracle dba# privilege, it will be executed using this user's account.# ---------------------------------------------------------------------------# ---------------------------------------------------------------------------# Determine the user which is executing this script.# ---------------------------------------------------------------------------CUSER=`id |cut -d"(" -f2 | cut -d ")" -f1`# ---------------------------------------------------------------------------# Put output in .out. Change as desired.# Note: output directory requires write permission.# ---------------------------------------------------------------------------RMAN_LOG_FILE=${0}.`date +%Y%m%d%H%M%S`.out# ---------------------------------------------------------------------------# You may want to delete the output file so that backup information does # not accumulate. If not, delete the following lines. # ---------------------------------------------------------------------------if [ -f "$RMAN_LOG_FILE" ]thenrm -f "$RMAN_LOG_FILE"fi# -----------------------------------------------------------------# Initialize the log file.# -----------------------------------------------------------------echo >> $RMAN_LOG_FILEchmod 666 $RMAN_LOG_FILE# ---------------------------------------------------------------------------# Log the start of this script.# ---------------------------------------------------------------------------echo Script $0 >> $RMAN_LOG_FILEecho ==== started on `date` ==== >> $RMAN_LOG_FILEecho >> $RMAN_LOG_FILE# ---------------------------------------------------------------------------# Replace /db/oracle/product/ora81, below, with the Oracle home path. # ---------------------------------------------------------------------------ORACLE_HOME=/oracle/product/10.2.0export ORACLE_HOME# ---------------------------------------------------------------------------# Replace ora81, below, with the Oracle SID of the target database. # ---------------------------------------------------------------------------ORACLE_SID=orcdevexport ORACLE_SID# ---------------------------------------------------------------------------# Replace ora81, below, with the Oracle DBA user id (account).# --------------------------------------------------------------------------- ORACLE_USER=oracle# ---------------------------------------------------------------------------# Set the target connect string.# Replace "sys/manager", below, with the target connect string.# --------------------------------------------------------------------------- TARGET_CONNECT_STR= /# ---------------------------------------------------------------------------# Set the Oracle Recovery Manager name.# --------------------------------------------------------------------------- RMAN=$ORACLE_HOME/bin/rman# ---------------------------------------------------------------------------# Print out the value of the variables set by this script.# ---------------------------------------------------------------------------echo >> $RMAN_LOG_FILEecho "RMAN: $RMAN" >> $RMAN_LOG_FILEecho "ORACLE_SID: $ORACLE_SID" >> $RMAN_LOG_FILEecho "ORACLE_USER: $ORACLE_USER" >> $RMAN_LOG_FILE echo "ORACLE_HOME: $ORACLE_HOME" >> $RMAN_LOG_FILE # ---------------------------------------------------------------------------# Print out the value of the variables set by bphdb.# ---------------------------------------------------------------------------echo >> $RMAN_LOG_FILEecho "NB_ORA_FULL: $NB_ORA_FULL" >> $RMAN_LOG_FILE echo "NB_ORA_INCR: $NB_ORA_INCR" >>$RMAN_LOG_FILE echo "NB_ORA_CINC: $NB_ORA_CINC" >> $RMAN_LOG_FILE echo "NB_ORA_SERV:$NB_ORA_SERV" >> $RMAN_LOG_FILEecho "NB_ORA_POLICY: $NB_ORA_POLICY" >> $RMAN_LOG_FILE# ---------------------------------------------------------------------------# NOTE: This script assumes that the database is properly opened. If desired, # this would be the place to verify that.# ---------------------------------------------------------------------------echo >> $RMAN_LOG_FILE# ---------------------------------------------------------------------------# If this script is executed from a NetBackup schedule, NetBackup# sets an NB_ORA environment variable based on the schedule type.# The NB_ORA variable is then used to dynamically set BACKUP_TYPE# For example, when:# schedule type is BACKUP_TYPE is# ---------------- --------------# Automatic Full INCREMENTAL LEVEL=0# Automatic Differential Incremental INCREMENTAL LEVEL=1# Automatic Cumulative Incremental INCREMENTAL LEVEL=1 CUMULATIVE ## For user initiated backups, BACKUP_TYPE defaults to incremental# level 0 (full). To change the default for a user initiated# backup to incremental or incremental cumulative, uncomment# one of the following two lines.# BACKUP_TYPE="INCREMENTAL LEVEL=1"# BACKUP_TYPE="INCREMENTAL LEVEL=1 CUMULATIVE"## Note that we use incremental level 0 to specify full backups.# That is because, although they are identical in content, only# the incremental level 0 backup can have incremental backups of# level > 0 applied to it.# ---------------------------------------------------------------------------if [ "$NB_ORA_FULL" = "1" ]thenecho "Full backup requested" >> $RMAN_LOG_FILEBACKUP_TYPE="INCREMENTAL LEVEL=0"elif [ "$NB_ORA_INCR" = "1" ]thenecho "Differential incremental backup requested" >> $RMAN_LOG_FILE BACKUP_TYPE="INCREMENTAL LEVEL=1"elif [ "$NB_ORA_CINC" = "1" ]thenecho "Cumulative incremental backup requested" >> $RMAN_LOG_FILE BACKUP_TYPE="INCREMENTAL LEVEL=1 CUMULATIVE"elif [ "$BACKUP_TYPE" = "" ]thenecho "Default - Full backup requested" >> $RMAN_LOG_FILEBACKUP_TYPE="INCREMENTAL LEVEL=0"fi# ---------------------------------------------------------------------------# Call Recovery Manager to initiate the backup. This example does not use a # Recovery Catalog. If you choose to use one, replace the option 'nocatalog' # from the rman command line below with the# 'rcvcat /@' statement.## Note: Any environment variables needed at run time by RMAN# must be set and exported within the switch user (su) command.# ---------------------------------------------------------------------------# Backs up the whole database. This backup is part of the incremental# strategy (this means it can have incremental backups of levels > 0# applied to it).## We do not need to explicitly request the control file to be included# in this backup, as it is automatically included each time file 1 of# the system tablespace is backed up (the inference: as it is a whole# database backup, file 1 of the system tablespace will be backed up,# hence the controlfile will also be included automatically).## Typically, a level 0 backup would be done at least once a week.## The scenario assumes:# o you are backing your database up to two tape drives# o you want each backup set to include a maximum of 5 files# o you wish to include offline datafiles, and read-only tablespaces,# in the backup# o you want the backup to continue if any files are inaccessible.# o you are not using a Recovery Catalog# o you are explicitly backing up the control file. Since you are# specifying nocatalog, the controlfile backup that occurs# automatically as the result of backing up the system file is# not sufficient; it will not contain records for the backup that# is currently in progress.# o you want to archive the current log, back up all the# archive logs using two channels, putting a maximum of 20 logs# in a backup set, and deleting them once the backup is complete.## Note that the format string is constructed to guarantee uniqueness and# to enhance NetBackup for Oracle backup and restore performance.### NOTE WHEN USING TNS ALIAS: When connecting to a database# using a TNS alias, you must use a send command or a parms operand to# specify environment variables. In other words, when accessing a database # through a listener, the environment variables set at the system level are not # visible when RMAN is running. For more information on the environment # variables, please refer to the NetBackup for Oracle Admin. Guide.## ---------------------------------------------------------------------------CMD_STR="ORACLE_HOME=$ORACLE_HOMEexport ORACLE_HOMEORACLE_SID=$ORACLE_SIDexport ORACLE_SID$RMAN target / nocatalog msglog $RMAN_LOG_FILE append << EOFRUN {ALLOCATE CHANNEL ch00 TYPE 'SBT_TAPE';SEND 'NB_ORA_POLICY=aix_ora_full';BACKUP$BACKUP_TYPESKIP INACCESSIBLETAG hot_db_bk_level0FILESPERSET 30# recommended formatFORMAT 'bk_%s_%p_%t'DATABASE;sql 'alter system archive log current';RELEASE CHANNEL ch00;# backup all archive logsALLOCATE CHANNEL ch00 TYPE 'SBT_TAPE';SEND 'NB_ORA_POLICY=aix_ora_full';BACKUPfilesperset 20FORMAT 'al_%s_%p_%t'ARCHIVELOG ALL DELETE INPUT;RELEASE CHANNEL ch00;## Note: During the process of backing up the database, RMAN also backs up the # control file. This version of the control file does not contain the# information about the current backup because "nocatalog" has been specified. # Too include the information about the current backup, the control file should# be backed up as the last step of the RMAN section. This step would not be# necessary if we were using a recovery catalog.#ALLOCATE CHANNEL ch00 TYPE 'SBT_TAPE';BACKUP# recommended formatFORMAT 'cntrl_%s_%p_%t'CURRENT CONTROLFILE;RELEASE CHANNEL ch00;ALLOCATE CHANNEL ch00 TYPE DISK ;COPYCURRENT CONTROLFILE to '/usr/openv/controlfile/control.ora';RELEASE CHANNEL ch00;}EOF"# Initiate the command stringif [ "$CUSER" = "root" ]thensu - $ORACLE_USER -c "$CMD_STR" >> $RMAN_LOG_FILERSTAT=$?else/usr/bin/sh -c "$CMD_STR" >> $RMAN_LOG_FILERSTAT=$?fi# ---------------------------------------------------------------------------# Log the completion of this script.# ---------------------------------------------------------------------------if [ "$RSTAT" = "0" ]thenLOGMSG="ended successfully"/usr/openv/netbackup/bin/bpbackup -p oracle_control_file -s user -t 0 /usr/openv/controlfile/control.oraelseLOGMSG="ended in error"fiecho >> $RMAN_LOG_FILEecho Script $0 >> $RMAN_LOG_FILEecho ==== $LOGMSG on `date` ==== >> $RMAN_LOG_FILEecho >> $RMAN_LOG_FILEexit $RSTAT================================================================== training:/usr/openv/orascripts#ls -rlt total 24-rw-r--r-- 1 oradev dba 11832 May 23 14:42 ora_full.sh⼆、NBU⽬录库备份设置NBU安装后需要设置⼀个catalog⽬录备份作业,已保证NBU备份内部数据库损坏可以还原。
nbu实施
Mirage磁带化磁盘库安装须知―――For VERITAS NBU存储管理软件―――1. Mirage磁带化磁盘库模拟设备说明Mirage 模拟的磁带驱动器制式为IBM LTO2,单个Mirage控制器可模拟1-4个磁带驱动器(具体由用户设置)。
Mirage 模拟的机械手为Sony LIB-81。
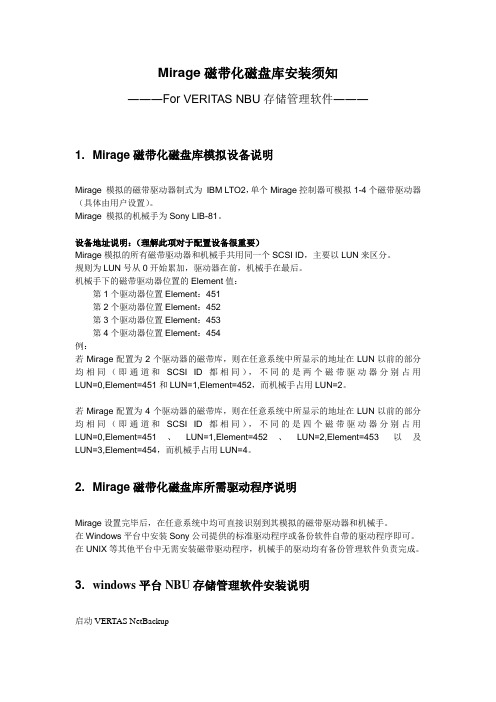
设备地址说明:(理解此项对于配置设备很重要)Mirage模拟的所有磁带驱动器和机械手共用同一个SCSI ID,主要以LUN来区分。
规则为LUN号从0开始累加,驱动器在前,机械手在最后。
机械手下的磁带驱动器位置的Element值:第1个驱动器位置Element:451第2个驱动器位置Element:452第3个驱动器位置Element:453第4个驱动器位置Element:454例:若Mirage配置为2个驱动器的磁带库,则在任意系统中所显示的地址在LUN以前的部分均相同(即通道和SCSI ID都相同),不同的是两个磁带驱动器分别占用LUN=0,Element=451和LUN=1,Element=452,而机械手占用LUN=2。
若Mirage配置为4个驱动器的磁带库,则在任意系统中所显示的地址在LUN以前的部分均相同(即通道和SCSI ID都相同),不同的是四个磁带驱动器分别占用LUN=0,Element=451、LUN=1,Element=452、LUN=2,Element=453以及LUN=3,Element=454,而机械手占用LUN=4。
2. Mirage磁带化磁盘库所需驱动程序说明Mirage设置完毕后,在任意系统中均可直接识别到其模拟的磁带驱动器和机械手。
在Windows平台中安装Sony公司提供的标准驱动程序或备份软件自带的驱动程序即可。
在UNIX等其他平台中无需安装磁带驱动程序,机械手的驱动均有备份管理软件负责完成。
3. windows平台NBU存储管理软件安装说明启动VERTAS NetBackup通过configure storage devices配置设备,点击下一步点击下一步,软件scan到设备,,点击下一步软件扫描到的设备类型:机械手为sony-lib81,驱动器类型为lto2,直接下一步不选该项storage unit,点击下一步点击左侧devices选项,再点击右侧下方的robots,右击机械手,选择change选项,在robot type中将机械手类型(tl8)改为tld点击drivers,右击驱动器,选change项,将驱动器加到机械手再通过configure storage unit配置设备,驱动器已加到机械手,点击下一步选择此项storage unit,点击下一步,完成向导右键robots选项下的机械手(TLD0)进行robot inventory点击左侧policies,根据需要创建备份策略(注意storage unit)右键所选策略,运行maual backup开始策略进行备份4. Solaris平台VERITAS NetBackup存储管理软件安装说明首先要确认安装了NBU存储管理软件。
NBU磁带库备份系统的安装步骤
软件安装软件安装主要包括MasterServer、MediaServer、软件的安装。
在备份系统中,选择hp做为MasterServer,同时充当MediaServer的角色。
为便于管理,确定MasterServer作备份系统的Global Database Host,用于存放所有的配置和备份信息。
下面逐一介绍每一种软件的安装过程,软件安装列表见附件三。
2.4.1 NetBackup DataCenter MasterServer Installition安装前作如下准备工作,在MediaServer安装时也要作同样的准备:·连接硬件所有MediaServer/MasterServer以及带库、磁带机均连接到一台SAN光纤交换机。
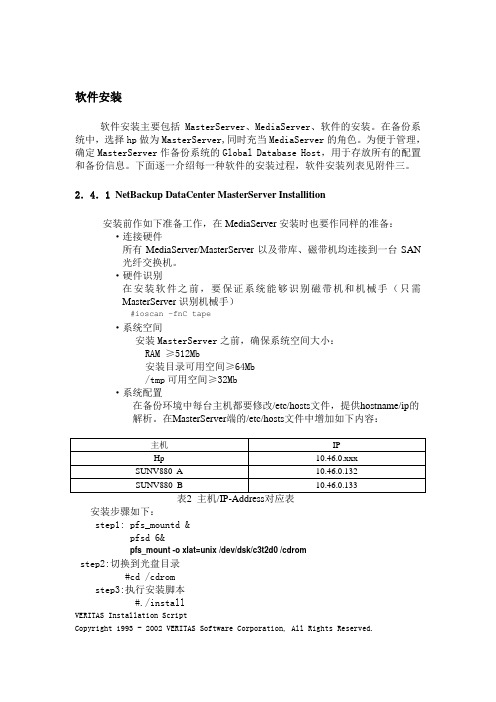
·硬件识别在安装软件之前,要保证系统能够识别磁带机和机械手(只需MasterServer识别机械手)#ioscan –fnC tape·系统空间安装MasterServer之前,确保系统空间大小:RAM ≥512Mb安装目录可用空间≥64Mb/tmp可用空间≥32Mb·系统配置在备份环境中每台主机都要修改/etc/hosts文件,提供hostname/ip的解析。
在MasterServer端的/etc/hosts文件中增加如下内容:安装步骤如下:step1: pfs_mountd &pfsd 6&pfs_mount -o xlat=unix /dev/dsk/c3t2d0 /cdromstep2:切换到光盘目录#cd /cdromstep3:执行安装脚本#./installVERITAS Installation ScriptCopyright 1993 - 2002 VERITAS Software Corporation, All Rights Reserved.Installation Options1 NetBackup2 NetBackup Client Software3 NetBackup Client Java Softwareq To quit from this scriptChoose an option [default: q]: 1/*选则1,安装Server,同时也安装mediaserver 软件The NetBackup and Media Manager software is built for use on hp hardware.Do you want to install NetBackup and Media Manager files? (y/n) [y] yNetBackup is normally installed in /usr/openv/netbackup.Is it OK to install in /usr/openv/netbackup? (y/n) [y] y/*确定Netbackup安装目录Media Manager is normally installed in /usr/openv/volmgr.Is it OK to install in /usr/openv/volmgr? (y/n) [y] y/*确定MediaManager安装目录The hp clients will be loaded.Do you want to load any other NetBackup clients onto the server? (y/n) [y] n/*确定是否安装其他client,server本身已包含client软件,所以选择“n”……Enter license key: /*输入NetBackup DataCenter Base license AJX6-OPWD-IC6K-3N36-383P-NCNP-PNNR-PPP:NetBackup DataCenter Base product with the following features enabled: Core Frozen Image ServicesOpen Transaction Managerhas been registered.All additional keys should be added at this time.Do you want to add additional license keys now? (y/n) [y] y /*输入其他相关license,也可在安装完软件后再输入其他licenseLicense Key Utility-------------------A) Add a License KeyD) Delete a License KeyF) List Active License KeysL) List Registered License KeysH) Helpq) Quit License Key UtilityEnter a letter:Installing NetBackup DataCenter version: 4.5GAIs backupserver the master server? (y/n) [y] y /*设置主机backupserver作masterserver Do you have any media (slave) servers? (y/n) [n] y/*设置其他主机作mediaserver Enter the fully qualified name of a media (slave) server (q to quit)? SUNV880_AEnter the fully qualified name of a media (slave) server (q to quit)? SUNV880_B Enter the fully qualified name of a media (slave) server (q to quit)? qChecking for a bpcd entry in /etc/inetd.conf: Adding bpcd entry.Original /etc/inetd.conf saved as /etc/inetd.conf.NBU_061103.10:25:08.Checking for a vnetd entry in /etc/inetd.conf: Adding vnetd entry.Checking for a vopied entry in /etc/inetd.conf: Adding vopied entry.Checking for a bpjava-msvc entry in /etc/inetd.conf: Adding bpjava-msvc entry.Checking /etc/services for the needed NetBackup and Media Manager services.Copying original /etc/services file to /etc/services.NBU_061103.10:31:32/etc/services to update NetBackup and Media Manager services./etc/services will be updated to add the following entries for NetBackup/Media Manager.bprd 13720/tcp bprdbpcd 13782/tcp bpcdbpdbm 13721/tcp bpdbmvnetd 13724/tcp vnetdvopied 13783/tcp vopiedbpjobd 13723/tcp bpjobdnbdbd 13784/tcp nbdbdvisd 9284/tcp visdbpjava-msvc 13722/tcp bpjava-msvcvmd 13701/tcp vmdacsd 13702/tcp acsdtl8cd 13705/tcp tl8cdtldcd 13711/tcp tldcdts8d 13709/tcp ts8dodld 13706/tcp odldtl4d 13713/tcp tl4dtsdd 13714/tcp tsddtshd 13715/tcp tshdtlmd 13716/tcp tlmdtlhcd 13717/tcp tlhcdlmfcd 13718/tcp lmfcdrsmd 13719/tcp rsmdTo change these entries modify the file /tmp/services.ov_edited.24848and enter <RETURN> when ready to continue:/etc/services has been updated to contain NetBackup and Media Manager services.To make NetBackup and Media Manager start up automatically when the system is restarted, the rc.veritas.aix script found in /usr/openv/netbackup/bin/goodies has been placed in the /etc directory, you must modify /etc/inittab to include it.……Enter which host will store global device information.(default: backupserver): backupserver /*设置masterserver 作全局设备信息中心To be able to install the client software the NetBackupprocesses need to be started. Do you want to start theNetBackup processes so client software can be installed? (y/n) [y] yStarting the NetBackup database manager process (bpdbm)./*启动bpdbm进程以装载client软件Do you want to create policy and schedule examples that you can view or usewhen you are configuring your own policies and schedules? (y/n) [y]n/*确定是否安装策略模板Client database indexing reduces the search time when restoringclient files, but it takes about 2% more disk space.Do you want to index the client database files? (y/n) [y] y/*确定是否采用client index 文件The default index level is 9 levels. Use the default? (y/n) [y] y /*确定 client index levelRunning index_clients process in background mode.Output from the process will be written to /tmp/index_clients.output.Do you want to start the Media Manager device daemon processes? (y/n) [y] y Starting the Media Manager device daemon processes./*确定是否启动MediaManager 进程Do you want to start the NetBackup bprd process sobackups and restores can be initiated? (y/n) [y] yStarting the NetBackup request daemon process (bprd)./*确定是否启动Netbackup 监听进程Done executing NB.instStep4 :确认安装成功#/usr/openv/netbackup/bin/goodies/bp.kill_all关闭所有已启动的NBU进程#/usr/openv/netbackup/bin/goodies/netbackup start启动NBU进程#/usr/openv/netbackup/bin/bpps –a查看NBU进程#/usr/openv/netbackup/bin/jnbSA&启动NBU的java管理界面至此,MasterServer软件安装完毕。
NBU系统配置手册大全

NBU系统配置手册1. 初始化配置 (3)1.1配置存储设备 (3)1.2配置介质 (6)1.3配置catalog (9)1.4配置备份策略 (12)2. 介质管理 (13)2.1添加介质 (13)2.1.1通过robot自动搜索 (13)2.1.2手工添加 (14)2.2修改介质属性 (15)2.3删除介质 (17)3. 查看Device状态 (18)4. 配置Host属性 (19)4.1Master属性 (19)4.2Client属性 (22)5. 设置Policy (23)5.1NT Policy (23)5.2MS SQL备份策略 (30)5.3UNIX备份策略 (31)6. 管理存储单元 (34)6.1添加存储单元 (34)6.1.1手工添加磁带存储单元 (34)6.1.2添加硬盘存储单元 (36)6.2修改存储单元 (37)7. 查看当前活动 (37)8. 常用命令 (38)9. 数据的恢复 (40)9.1恢复NT文件 (40)9.2NT/Windows 2000灾难恢复 (43)9.3MS SQL数据库恢复 (46)9.4UNIX文件系统恢复 (48)1. 初始化配置1.1配置存储设备1.安装完成后,启动NBU NetBackup Administration,系统第一次会自动启动Netbackup Assistant,如图1图12.点击下一步,Config Storage Devices,出现设备配置欢迎画面,如图2所示:图23.单击下一步,出现选择设备主机窗口,在此你可以选择连接备份设备的主机名称,也可以添加或删除主机,如图3所示:图34.单击下一步,系统会自动搜索连接到主机的存储设备,按照系统提示完成设备的配置,如图4所示:图4在上图中,如果只检测到tape driver(s)或robot(s),则可能是物理连线问题或driver没有正常工作,如果出现这种问题,可以关闭服务器和磁带库,检查SCSI连线,确认连接正常,再启动磁带库和服务器。
工业用机器人的配置及调试方法
工业用机器人的配置及调试方法简介本文档旨在介绍工业用机器人的配置和调试方法。
工业用机器人是自动化生产线中的重要组成部分,能够完成各种复杂的生产任务。
正确配置和调试机器人是确保其正常运行和高效工作的关键。
机器人配置1. 选择适当的机器人类型:根据生产需求和任务要求,选择适合的机器人类型,如SCARA、Delta、直线型等。
确保机器人的负载能力、速度和精度符合需求。
选择适当的机器人类型:根据生产需求和任务要求,选择适合的机器人类型,如SCARA、Delta、直线型等。
确保机器人的负载能力、速度和精度符合需求。
2. 确定机器人工作空间:根据生产线的布局和工艺要求,确定机器人的工作空间范围。
考虑到机器人的动作半径和安全距离,确保机器人能够自由移动和操作。
确定机器人工作空间:根据生产线的布局和工艺要求,确定机器人的工作空间范围。
考虑到机器人的动作半径和安全距离,确保机器人能够自由移动和操作。
3. 配置机器人末端工具:根据具体任务,选择适当的末端工具,如夹爪、吸盘等。
确保末端工具能够稳定可靠地完成操作,并具备适当的控制和感应功能。
配置机器人末端工具:根据具体任务,选择适当的末端工具,如夹爪、吸盘等。
确保末端工具能够稳定可靠地完成操作,并具备适当的控制和感应功能。
4. 选择合适的传感器和视觉系统:根据任务要求,选择适当的传感器和视觉系统,如力传感器、视觉传感器等。
配置传感器和视觉系统可以增强机器人的感知和控制能力,提高工作效率和安全性。
选择合适的传感器和视觉系统:根据任务要求,选择适当的传感器和视觉系统,如力传感器、视觉传感器等。
配置传感器和视觉系统可以增强机器人的感知和控制能力,提高工作效率和安全性。
机器人调试1. 检查机器人硬件连接:确保机器人的各个组件正确连接,并且电源供应正常。
检查电缆、插头和接口,确保信号传输正常。
检查机器人硬件连接:确保机器人的各个组件正确连接,并且电源供应正常。
检查电缆、插头和接口,确保信号传输正常。
nbu配置手册(oracle+informix)
Windows平台Nbu配置手册一、系统架构Master server: windows2003 hostname:nbuMedia server: windows 2003 hostname:client01Oracle:test实例运行在client01主机上rman库运行在nbu主机上二、安装nbu软件安装软件之前确定好hosts表里面对应的ip和host名1、安装master serverSolaris:首先安装NetBackup_6.5_ICS_Solaris.tar.gz, 都选第一个(PBX)。
6.0版本还需要安装一个rs的包然后再开始安装master serverWindows:将安装光盘放入光驱,选择Launch.exe双击运行NEXT,直到出现选择master server、Media server 和admin console的界面时输入license之后master server和media server变为可选状态,选择master server进行安装选择typical方式安装配置企业介质管理服务器,一般默认选择master server2、安装media server同master server 安装类似,只是在选择界面选择media server即可3、安装client 端可以将介质传到客户端进行安装,也可以通过在master server上安装同时分发到各个客户端,我们选择分发的方式进行安装。
选择install client software→select from available computers on the network/typical→输入master server,选择LAN方式然后进行安装4、安装补丁包:在NBU中远程分发客户端软件到客户端主机上面安装nbu软件client端或:step1:创建新的policy客户端总是和一个具体的备份策略(Policy)相绑定,客户端不能独立于Policy而存在.所以通过在Master Server上以”PUSH”方式向客户端分发NBU客户软件之前,必须先创建合适的Policy.(在Server上分发客户端软件,必须确保相应的客户端软件已存在于服务器上.)step2:分发客户端软件.#bpplclients (检测客户端名称及系统平台)#/usr/openv/netbackup/bin/install_client_files ftp <client> root这个过程将客户端软件传送到客户端的”/tmp/bp”目录下.step3:依次更新每个客户端的软件环境.#rsh <client_name> /tmp/bp/bin/client_configstep4:更新服务器端和所有客户端”/etc/host”文件.分别在服务器端和客户端的/etc/hosts文件中加入Master/Media Server与Client的IP地址和主机名.三、配置nbu设备1、配置机械臂和驱动器1.1、通过nbu提供的配置向导进行配置:Media and device management界面选择configure storage devices下一步,到选择管理带库的主机的界面:选择主机之后下一步,nbu会自动到指定主机上查找带库设备,成功之后会显示查找后的结果:然后一直next到确认配置:然后确认配置生效即可,之后即可在devices里面看到辨识到的机械臂和磁带驱动器1.2、手工添加在左侧的设备管理栏的devices菜单项下,有robot这个选项,点击它之后,就可以在菜单栏的action这个选项中新建机械手了;同时,如果已经有机械手存在,那么可以在右下角这个子窗口中,看到它们的状态。
AIX下配置磁带库机械臂
Atape 简介IBM AIX Atape 驱动提供对 IBM 磁带驱动器以及机械臂设备(Media Changer)的支持。
Atape 不仅可以给各种应用程序提供基本的磁带操作,例如对备份、恢复;提供基本的机械臂操作,例如载入(Mount)、载出(Unmount)磁带(Cartridges/Tapes);还为磁带管理系统提供更高级的功能。
该驱动对应用程序是透明的。
正确安装驱动以后,应用程序可以使用驱动提供的各种功能。
安装包下载:IBM Atape 安装包可以从ftp:///storage/devdrvr/AIX 下载。
从下面的网站确定你的操作系统的补丁级别是否符合要求:/tape/lto/compatibility.html下载步骤如下:# ftp Connected to .220-******************************************************************************* 220-* *220-* IBM's internal systems must only be used for conducting IBM's *220-* business or for purposes authorized by IBM management. *220-* *220-* Use is subject to audit at any time by IBM management. *220-* *220-******************************************************************************* 220-220 service FTP server (Version wu-2.6.2(5) Custom Sat May 28 01:48:31 MDT 2005) ready. Name (:root): anonymous331 Guest login ok, send any password.Password:230 Guest login ok, access restrictions apply.ftp> cd /storage/devdrvr/AIX250-Please read the file README250- it was last modified on Mon Oct 8 17:36:52 2007 - 520 days ago250 CWD command successful.ftp> ls200 PORT command successful.150 Opening ASCII mode data connection for file list.Atape.10.7.3.0.binAtape.11.3.4.0.binAtape.8.4.9.0.binAtape.9.7.5.0.binAtape.READMEAtape.fixlistREADMEatldd.5.5.1.0.binatldd.6.7.7.0.binatldd.Readmeatldd.fixlist226 Transfer complete.ftp> bin200 Type set to I.ftp> mget Atape.11.3.4.0.binmget Atape.11.3.4.0.bin? y200 PORT command successful.150 Opening BINARY mode data connection for Atape.11.3.4.0.bin (5376000 bytes). 226 Transfer complete.5376000 bytes received in 1.261 seconds (4165 Kbytes/s)local: Atape.11.3.4.0.bin remote: Atape.11.3.4.0.bin安装过程在安装新版本的设备驱动之前,建议先卸载老版本的驱动,并保证磁带设备已经上电、功能正常并已经正确连接到 AIX 系统上。
物理带库机械手配置方法 -(AIX)

AIX下机械手配置方法一、确定系统中磁带驱动器链接的HBA:# /usr/sbin/lsdev -C | grep I/Ofscsi0 Available 10-68-01 FC SCSI I/O Controller Protocol Devicefscsi1 Available 20-58-01 FC SCSI I/O Controller Protocol Device# /usr/sbin/lsdev -C -s scsi or # /usr/sbin/lsdev -C -s fcprmt0 Available 10-68-01 Other FC SCSI Tape Drivermt1 Available 10-68-01 Other FC SCSI Tape Drivermt2 Available 10-68-01 Other FC SCSI Tape Drivermt3 Available 10-68-01 Other FC SCSI Tape Drivermt4 Available 10-68-01 Other FC SCSI Tape Drivermt5 Available 10-68-01 Other FC SCSI Tape Drive所有磁带机都连接到控制器 10-68-01,其控制器名称为 fscsi0。
二、确定机械手的SCSI ID和LUN ID:要创建设备文件,必须知道 SCSI 地址,SCSI 地址由 SCSI ID 和逻辑单元号 (LUN)组成。
一个库可能有多个磁带驱动器和多个机械手控制设备。
通常 SCSI ID 标识库,而LUN 标识库中的磁带驱动器和机械手控制设备。
但是挂接光纤通道的库可能有多个SCSI ID,每个 ID 对应库上的一个物理连接(端口)。
而 LUN 则标识库的每个分区中的磁带驱动器和机械手设备。
以下信息可以帮助确定机械手设备的 SCSI ID 和 LUN ID:要确定 SCSI ID,必须首先确定磁带驱动器的 SCSI 地址。
NBU手动添加机械手
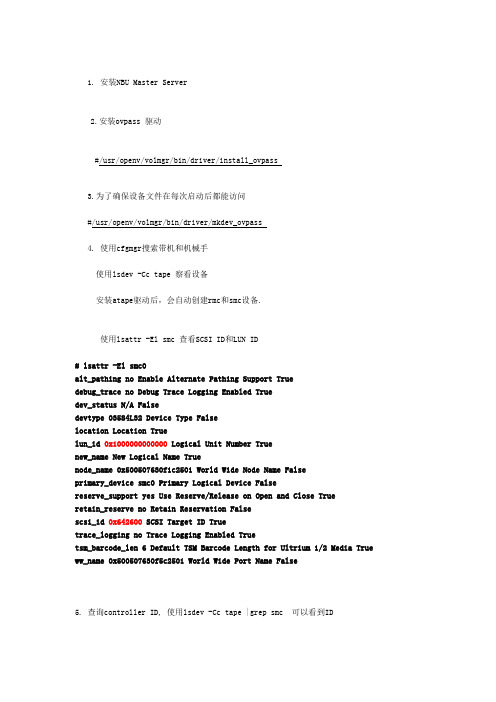
1. 安装NBU Master Server2.安装ovpass 驱动#/usr/openv/volmgr/bin/driver/install_ovpass3.为了确保设备文件在每次启动后都能访问#/usr/openv/volmgr/bin/driver/mkdev_ovpass4. 使用cfgmgr搜索带机和机械手使用lsdev -Cc tape 察看设备安装atape驱动后,会自动创建rmc和smc设备.使用lsattr -El smc 查看SCSI ID和LUN ID# lsattr -El smc0alt_pathing no Enable Alternate Pathing Support Truedebug_trace no Debug Trace Logging Enabled Truedev_status N/A Falsedevtype 03584L32 Device Type Falselocation Location Truelun_id 0x1000000000000 Logical Unit Number Truenew_name New Logical Name Truenode_name 0x500507630f1c2501 World Wide Node Name Falseprimary_device smc0 Primary Logical Device Falsereserve_support yes Use Reserve/Release on Open and Close Trueretain_reserve no Retain Reservation Falsescsi_id 0x642600 SCSI Target ID Truetrace_logging no Trace Logging Enabled Truetsm_barcode_len 6 Default TSM Barcode Length for Ultrium 1/2 Media True ww_name 0x500507630f5c2501 World Wide Port Name False5. 查询controller ID, 使用lsdev -Cc tape |grep smc 可以看到ID# lsdev -Cc tape |grep smc 0smc0 Available 00-08-01 IBM 3584 Library Medium Changer (FCP)6. 然后通过lsdev -Cc adapter就可以找到控制这个机械手的controller ,在本例中为fcs0。
机器人简单配置

机器人简单配置机器人初始化★进入系统菜单→机器人冷启动→然后按住PREV和NEXT键★选择3 Controlled Start→将菜单中的改为ENABLE→单击ENTER★选择1 Start Setup Wizard→选择Body Shop→选择Spot Welding→选择One WeldControl→选择EtherNet IP→选择Robot Held Gun→选择“YES”(伺服枪,否则选择“NO”)→选择“YES”(是否要选择伺服电机型号)→选择“1”(选择伺服电机型号)→填入枪的速比(在枪的铭牌上)→填入枪的最大压力(在枪的铭牌上)→填入枪的最大开口(在枪的铭牌上)→选择“C”&“X”型枪→选择伺服放大器(一把枪选择“2”)→选择是否有温控(根据实际情况)→选择是否有修磨机(标准配置有)→选择修磨机电机型号(根据实际情况)→选择“YES”(Tip-Dress after Cap Changing)→选择“YES”(第一次配置时Pressure Table Setup)**配置完成**★选择2 Set Cell I/O to PLC→选择EtherNet IP**配置完成**★选择5 EXIT★选择FUNCTION→选择Cold Start***机器人初始化完成***焊枪初始化★初始化设置→MENUS→UTILITES→GUNSETUP→依次按ENTER键进行一下设定[SET GUN MOTION SIGN] (设定枪的方向)→关枪→按[F5]CLOSE→按[F3]COMP[SET GUN SPACE,MASTER,GUN] (设定枪的基本参数)→在“******”处填入相应参数(在枪的铭牌上找)→关枪至零位→按[F3]COMP[AUTO TUNE] (自动计算一些参数)→按SHIFT+[F3] EXEC (运行过程中SHIFT必须一直按住)[THICKNESS CHECK CABIBRATION](◆必须在压力标定完成后再做◆)→按SHIFT+[F3] EXEC (运行过程中SHIFT必须一直按住)**设置完成**★焊枪压力标定→MENUS →Setup→Servo Gun→选择<*DETAIL*> (第二行)→ENTER (没有标定会现实INCOMP)→选择Pressure cal 后的<*DETAIL*>→ENTER→填写以下内容:[Pressuring Time (sec)] = 2.0 加压时间2"[Thickness of Gauge (mm)]压力计厚度请如实填写[Pushing Depth (mm)]压入深度,填20mm[Gun Open Value (mm)]标定时枪口每次张开的大小→尝试输入适当的扭矩值,从低扭矩开始(5%);直到到达匹配的压力→SHIFT-[F3: Pressure]→填入压力值→所有扭矩测量完毕后点击-[F3: comp]**设置完成**→运行程序TW_SETG1(宏)使本目录下Tip wear standard 为COMP★零位设置→MENUS→0→SYSTEM→GUN MASTER→BZAL→FUNCTION→0→POWER CYCLE(清除报警,否则机器人无法运动)→把焊枪上下电极杆开到相碰按下(该点即为焊枪零位)→SHIFT+EXEC(记入)**设置完成*****焊枪初始化完成***机器人通讯设置★机器人I/P地址设置→MENUS→SETUP→[FI] TYPE→下页→下页→HOST COMM→DETAIL ★焊机I/P地址设置→MENUS→I/O→[FI] TYPE→下页→ETHERNET I/P→选择WELD CONTROL→CONFIG(必须在FALSE状态下,否则把TURE改成FALSE)填入以下内容:Vendor ID: 270Device TYPE: 12Produce code: 1Inputsize: 1Outputsixe: 1RPI: 32Assembly instance(input): 100Assembly instance(input): 150★DEVICENET通讯设置→MENUS→I/O→[FI] TYPE→下页→DEVICENET→选择(82)→[F3] DIAG→[F3] BROWSE(必须在ONLINE状态下,光标移到63上,波特率为500) →机器人自动查找→QUERY→POLL→ADD-SCAN→ADD-DEF→重启★同种方式配置其他模块***机器人通讯设置完成***机器人HOME点设定★将机器人示教到相应位置★在寄存器中记入位置值→MENUS→SETUP→下页→REF POSITION→DETAIL→SHIFT+RECORD★在位置寄存器中记入位置值→MENUS→下页→DA TE→下页→POSITION REG→PR[1] →SHIFT+RECORD***机器人通讯设置完成******机器人基本配置完成,可以编制焊接程序了***。
panda机械手依赖资料

徐经理:您好!此次方案中,关于贵公司需要的资料提供如下:1、详细见CAD图:SR7400_area2、提供基本的机械手资料,包括以下:2.1 机械手规格参数表2.3 机械手配套电气规格(对应机床连接规格)通过增设IO 槽来实现与机床的连接,最大2槽/增设IO 卡(输入32点、输出32点),其中1槽是标准配置,2槽为选配, 外形图:CN1注*1第1张卡的I/O底板编号。
*2第2张卡的I/O底板编号。
使用接头:CD6137SA1G1(Cvilux)适用接头:HDCB-37P 或同等品 外壳:HDC-CTHCN21 19 20 37 请购买屏蔽线。
注*1 第1张卡的I/O 底板编号。
*2 第2张卡的I/O 底板编号。
使用接头:CD6137SA1G1(Cvilux) 适用接头:HDCB-37P 或同等品 外壳:HDC-CTH输入线路・ 光电隔离电源输入类型 ・ 输入电流55mA 以上。
输出线路・ 光电隔离电源输入类型 ・ 额定电压 DC24V・ 最大电流 500mA /1点 16点Total 2A 以下 ・ OUT_24V 额定电压 DC24V ±10% ・ OUT_24V 消耗电流 10mA (Typ ) ・ 电子保险丝跳断电流6A (Typ )1 1920 37请购买屏蔽线。
ICOM 输入NPN 类型(AD1361-0002) 输出线路输入连接举例如下。
此例中COM1连接上24V电源,作为"LOW SIDE SWITCH" 使用,COM2连接GND,作为HIGH SIDE SWITCH使用。
CN2情况,也是同样连接方式。
AD1361-002的输出连接举例如下。
CN2情况,也是同样连接方式。
2.4 机械手使用环境要求见规格参数表2.5 机械手维护、保养、安全规范1.日常维护操作前必须对机器做以下的检查。
如发现异常,必须马上维修或者采取其他必2.定期检查3年检查一次3.安全规范机器人可动范围比较大,手臂动作速度比较高,所以具有一般的机械装置不具有的危险性,进行示教等操作时需要注意。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AIX下机械手配置方法一、确定系统中磁带驱动器链接的HBA:# /usr/sbin/lsdev -C | grep I/Ofscsi0 Available 10-68-01 FC SCSI I/O Controller Protocol Devicefscsi1 Available 20-58-01 FC SCSI I/O Controller Protocol Device# /usr/sbin/lsdev -C -s scsi or # /usr/sbin/lsdev -C -s fcprmt0 Available 10-68-01 Other FC SCSI Tape Drivermt1 Available 10-68-01 Other FC SCSI Tape Drivermt2 Available 10-68-01 Other FC SCSI Tape Drivermt3 Available 10-68-01 Other FC SCSI Tape Drivermt4 Available 10-68-01 Other FC SCSI Tape Drivermt5 Available 10-68-01 Other FC SCSI Tape Drive所有磁带机都连接到控制器 10-68-01,其控制器名称为 fscsi0。
二、确定机械手的SCSI ID和LUN ID:要创建设备文件,必须知道 SCSI 地址,SCSI 地址由 SCSI ID 和逻辑单元号 (LUN)组成。
一个库可能有多个磁带驱动器和多个机械手控制设备。
通常 SCSI ID 标识库,而LUN 标识库中的磁带驱动器和机械手控制设备。
但是挂接光纤通道的库可能有多个SCSI ID,每个 ID 对应库上的一个物理连接(端口)。
而 LUN 则标识库的每个分区中的磁带驱动器和机械手设备。
以下信息可以帮助确定机械手设备的 SCSI ID 和 LUN ID:要确定 SCSI ID,必须首先确定磁带驱动器的 SCSI 地址。
然后使用磁带驱动器地址推断机械手设备的 SCSI ID。
对于有多个机械手设备的库,必须确定每个机械手设备的 SCSI ID 和 LUN ID。
要确定 LUN,请参阅供应商的文档。
库如何向其设备分配 LUN ID取决于库本身。
从磁带库管理界面中确定机械手绑定到哪个驱动器,根据此磁带机的序号从操作系统scan -tape 的输出确定对应的 rmt#设备号。
然后使用 odmget 命令显示磁带机的属性获取 scsi_id(或使用 lsattr –El rmt0 –H),lun id 则是在磁带库中定义,可以从磁带库配置中查询获得。
下列示例显示 rmt0 和 rmt3 的输出的片段:# /usr/bin/odmget -q "name=rmt0" CuAtCuAt:name = "rmt0"attribute = "scsi_id"value = "0x11400"type = "R"generic = "D"rep = "s"nls_index = 6# /usr/bin/odmget -q "name=rmt3" CuAtCuAt:name = "rmt3"attribute = "scsi_id"value = "0x11500"type = "R"generic = "D"rep = "s"nls_index = 6如果库中所有磁带驱动器的 SCSI ID 都相同,而且存在一个机械手设备,则使用该SCSI ID。
如果库中的所有磁带驱动器都具有相同的 SCSI ID,并且存在多个机械手设备,则为每个机械手设备创建一个设备文件。
对每个设备文件使用相同的 SCSI ID。
如果磁带驱动器有多个 SCSI ID,则很可能每个 SCSI ID 都存在对应的机械手设备。
则为每个 SCSI ID 创建一个设备文件。
在此示例中,rmt0 到 rmt2 有 SCSI ID 0x11400,而 rmt3 到 rmt5 有 SCSI ID 0x11500。
因为存在两个 SCSI ID,所以此库中存在两个机械手设备。
机械手的LUN ID可以通过如下方法得到:#export CFGLOG="CMD,METH,LIB,VERBOSITY:9"# cfgmgr -l fscsi0# alog -o -t cfg > /tmp/alog.txt# cfgmgr -l fscsi1# alog -o -t cfg > /tmp/blog.txt可以从上述的alog输出文件中确认机械手的 scsi ID and Lun ID:M1 753824 ...scsi_id/lun_id = 0x10600/0x0M1 753824 ...LUN = 0x0, type = 0x1M1 753824 4 luns foundM1 753824 ...LUN = 0x1000000000000, type = 0x1 M1 753824 ...LUN = 0x2000000000000, type = 0x1 M1 753824 ...LUN = 0x3000000000000, type = 0x1 M1 753824 ...LUN = 0x0, type = 0x1M1 753824 4 luns foundM1 753824 ...LUN = 0x1000000000000, type = 0x1 M1 753824 ...LUN = 0x2000000000000, type = 0x1 M1 753824 ...LUN = 0x3000000000000, type = 0x1 M1 753824 ...LUN = 0x0, type = 0x1M1 753824 4 luns foundM1 753824 ...LUN = 0x1000000000000, type = 0x1 M1 753824 ...LUN = 0x2000000000000, type = 0x1 M1 753824 ...LUN = 0x3000000000000, type = 0x1 M1 753824 ...LUN = 0x0, type = 0x0M1 753824 3 luns foundM1 868424 1 luns foundM1 868424 4 luns foundM1 868424 ...LUN = 0x1000000000000, type = 0x1 M1 868424 ...LUN = 0x2000000000000, type = 0x1 M1 868424 ...LUN = 0x3000000000000, type = 0x1 M1 868424 ...scsi_id/lun_id = 0x10600/0x0M1 868424 ...LUN = 0x0, type = 0x8M1 868424 5 luns foundM1 868424 ...LUN = 0x1000000000000, type = 0x1 M1 868424 ...LUN = 0x2000000000000, type = 0x1 M1 868424 ...LUN = 0x3000000000000, type = 0x1 M1 868424 ...LUN = 0x4000000000000, type = 0x1 M1 868424 1 luns foundM1 868424 ...LUN = 0x0, type = 0x0M1 868424 3 luns found机械手的 type : 0x8机械手的 scsi ID : 0x10600机械手的 Lun ID : 0x0三、安装 ovpass 驱动并创建ovpass设备文件:# /usr/openv/volmgr/bin/driver/install_ovpass# /usr/openv/volmgr/bin/driver/mkdev_ovpass# mkdev -c media_changer -s fcp -t ovpass -p fscsi0 -w 0x10600,0ovpass0 Available四、验证创建的ovpass设备文件是否正确:通过tpautoconf –r命令的输出结果与磁带库管理软件中看到的机械手的SN比对,判断配置是否正确。
# /usr/openv/volmgr/bin/tpautoconf -rTPAC60 ADIC Scalar i500 571G ADICA0C0609920_LLA -1 -1 -1 -1 /dev/ovpass0 - -TPAC60 ADIC Scalar i500 200G 0MJ4C00201 -1 -1 -1 -1 /dev/ovpass1 - -TPAC60 ADIC Scalar i500 200G 14N187PU00 -1 -1 -1 -1 /dev/ovpass3 - -如果配置的不正确或有多余的ovpass设备文件产生,则需要删除ovpass驱动,重新生成ovpass设备文件:# /usr/openv/volmgr/bin/driver/remove_ovpass# /usr/openv/volmgr/bin/driver/install_ovpass# /usr/openv/volmgr/bin/driver/mkdev_ovpass# mkdev -c media_changer -s fcp -t ovpass -p fscsi1 -w 0x330363,1ovpass0 Available# mkdev -c media_changer -s fcp -t ovpass -p fscsi1 -w 0x330802,0ovpass1 Available# /usr/openv/volmgr/bin/tpautoconf -rTPAC60 ADIC Scalar i500 571G ADICA0C0609920_LLA -1 -1 -1 -1 /dev/ovpass0 - -TPAC60 ADIC Scalar i500 200G 14N187PU00 -1 -1 -1 -1 /dev/ovpass1 - -# mkdev -c media_changer -s fcp -t ovpass -p fscsi1 -w 0x33003e,0ovpass2 Available# /usr/openv/volmgr/bin/tpautoconf -rTPAC60 ADIC Scalar i500 571G ADICA0C0609920_LLA -1 -1 -1 -1 /dev/ovpass0 - -TPAC60 ADIC Scalar i500 200G 14N187PU00 -1 -1 -1 -1 /dev/ovpass1 - -TPAC60 ADIC Scalar i500 200G 0MJ4C00200 -1 -1 -1 -1 /dev/ovpass2 - -如果有多条光纤链路链接到机械手,还需要对其他的链路进行配置,例如:# mkdev -c media_changer -s fcp -t ovpass -p fscsi3 -w 0x330363,1ovpass3 Available# mkdev -c media_changer -s fcp -t ovpass -p fscsi3 -w 0x330802,0ovpass4 Available# mkdev -c media_changer -s fcp -t ovpass -p fscsi3 -w 0x33003e,0ovpass5 Available# /usr/openv/volmgr/bin/tpautoconf –rTPAC60 ADIC Scalar i500 571G ADICA0C0609920_LLA -1 -1 -1 -1 /dev/ovpass0 - - TPAC60 ADIC Scalar i500 200G 14N187PU00 -1 -1 -1 -1 /dev/ovpass1 - -TPAC60 ADIC Scalar i500 200G 0MJ4C00200 -1 -1 -1 -1 /dev/ovpass2 - -TPAC60 ADIC Scalar i500 571G ADICA0C0609920_LLA -1 -1 -1 -1 /dev/ovpass3 - - TPAC60 ADIC Scalar i500 200G 14N187PU00 -1 -1 -1 -1 /dev/ovpass4 - -TPAC60 ADIC Scalar i500 200G 0MJ4C00200 -1 -1 -1 -1 /dev/ovpass5 - -。