基于移动最小二乘法的列车牵引特性曲线拟合
基才BP神经网络的数字式涡流传感器特性曲线拟合的实现
电 涡流 传 感 器 的 等 效 阻抗 可表 示 为 :- z R+i
B P算 法 是一 种 监督 式 的 学 习算 法 。 P神 经 网络 算 法 的主 B
要 思 想是 : 假设 输 入 样 本 为 J , 2… , , P 尸 , 只 目标 样本 为 , , , l …
R l = + 丽oM2 J 2
…
当神 经 元 有 多个 输 入 毛 ( 12 i , ,… , = m)和 单 个 输 出 时 , 入 和输 出 的关 系 如 ( ) 所 示 : 输 6式
、● 1
求解 () 1 式所 示 方 程 组 , 可得 电 涡流 传 感 器 的 等 效 阻抗 如
竹=
f =l
W 托一I 6 )
过 铁 心 的 磁 通 是 随 着 电 流 做 周 期 性 变 化 的 , 以 在 这 些 闭合 所
但 是 在 实 际 中利 用 涡 流 传 感 器 进 行 位 移 测 量 时 . 入 输 和 输 出 特 性 曲线 存 在 较 为 严 重 的 非 线 性 关 系 , 响 到 传 感 影 器 的 测 量 精 度 . 了 提 高 传 感 器 的 测 量 精 度 , 际 中 经 常 为 实 通 过 计 算 机 利 用 最 小 二 乘 法 、 表 法 、 性 插 值 等 方 法 解 查 线
() 3
,
网络 的输 出为 A。 , , , … A 。当输 出与 目标 样本 产 生误 差 之 A:
后 , 用误 差 反 向传 播 回 去进 行 调 整 权 值 , 可 能 使 输 出 A , 利 尽 A , , 与 目标 样 本 , , , 相 近 , 误 差达 到最 小 值 , … A … 使 权
与 现 有 最 小二 乘 法 进 行 对 比 。仿 真 结果 表 明 , 于 B 基 P算 法 所 得 拟 合 曲 线误 差很 小 、 收敛 速 度 快 且 具 有 更 高的 拟 合 精
波尔共振等实验的改进方法及其Matlab实现-数据处理
波尔共振等实验的改进方法及其Matlab实现数据处理-论文网论文摘要:本文首先分析大学基础物理实验“用波尔共振仪研究受迫振动”所采用的测量方法的不足,接着具体阐述为尽可能提高精度而利用Matlab处理该实验时,所应用的“初步线性回归-结合具体情况改进线性回归-原模型回归”这一依次回归的方法和相关原理与技巧,并进行了检验。
进而以此为参考,将本文方法推广应用于其他可能的物理实验中以得到数据处理甚至测量方法上的改进。
论文关键词:波尔共振,依次回归法,数据处理,测量方法1引言在大学基础物理实验中,有许多实验可以利用计算机借助应用方便且可视化功能强大的数学软件Matlab,通过一定的具体方法来进行测量方法的改进和数据处理的精确化与可视化,从而提高实验的精度。
本文以波尔共振实验为例,结合具体情况阐述将该软件应用于有关物理实验时,为了取得上述效果而应遵循的处理方法及应用的有关原理与技巧,使原实验得到相关改进。
2实际中原实验方法的不足由于仪器制造工艺及材料性能等的影响,通过实际中多次的实验可知,在摆轮振动过程中,振幅不同时系统的固有频率在小范围内变化。
由相关的理论推导和实际试验皆可以知道,阻尼系数的测量值和系统固有频率的具体值有关,的不确定性会影响测量精度,尤其是在变化范围相对于不可忽略的情况下。
再者,很重要的一点,对特性曲线的描绘,进行原实验时采取的是人为对离散数据作图,利用坐标确定点的位置、把有限的离散点连成曲线时都会人为造成一定误差。
若再对幅频特性曲线峰值的进行求取点,找出对应的横坐标,则更会带来许多偶然误差。
并且由于随机取点作图的缘故而无法对结果的不确定度进行定量判断。
3利用Matlab进行相关改进为了避免原实验方法中以上所述问题的出现,采用与计算机结合的方式,采取能够避免上述弊端的新的方法求解所需物理量,同时对曲线进行精确描绘。
利用Matlab软件结合具体实验情况,采取一定的方法,能使结果同时到达上述效果。
带插值条件的移动最小二乘曲线拟合

带插值条件的移动最小二乘曲线拟合在数据拟合中,最小二乘法是一种广泛使用的方法。
它通过最小化误差的平方和来确定模型的参数。
但是,在许多实际场景中,数据可能包含噪声或坏点,最小二乘法无法准确地拟合这些数据。
在这种情况下,可以使用带插值条件的移动最小二乘曲线拟合。
移动最小二乘法是一种在数据上实现局部拟合的方法。
通过选择一个移动窗口大小来限制拟合曲线的局部性质,移动最小二乘法可以在每个位置上生成一个近似曲线。
然而,在某些情况下,通过简单的移动最小二乘法拟合曲线可能会过于平滑或过于不光滑,因此不适合应用于某些情况下。
在这种情况下,可以使用带插值条件的移动最小二乘曲线拟合。
这种方法引入了插值条件,以控制拟合曲线的平滑程度。
所谓插值条件,是指在拟合的每个位置上,将拟合曲线与原始数据的值相匹配。
这使得生成的曲线不会跳跃或突变,从而实现更顺滑的过渡。
根据带插值条件的移动最小二乘曲线拟合的过程,可以将其划分为以下步骤:1. 定义拟合窗口大小和拟合阶数在整个数据集中选择一个拟合窗口,将其定义为每个位置需要拟合的数据点的数量。
这个窗口大小可以随着数据间隔的大小而变化,并且可以根据拟合任务的特殊性质进行自定义。
另外,需要选择一个拟合阶数,该阶数定义了用于生成拟合曲线的多项式的次数。
2. 计算每个位置上的拟合参数对于每个移动窗口,可以使用最小二乘法计算多项式系数(即拟合参数),以生成一组拟合曲线。
这些拟合参数是通过求解以下矩阵方程组来获得的:$ \sum_{i=0}^{n} \sum_{j=0}^{m} w_i(x_j-x)^2a_{i+j}=\sum_{i=0}^{n}w_iy_i(x_i-x)^k$在这个方程组中,为了控制拟合的局部性质,只需要考虑在窗口内的数据。
同时,通过加权最小二乘法可以保证使用拟合参数产生的拟合数据与原始数据契合得更好。
在上述方程组中,$x$ 是当前拟合位置,$x_i$ 是在拟合窗口范围内的数据点的位置, $y_i$ 是数据点的值,$w_i$ 是加权系数, $m$ 是拟合阶数, $n$ 是窗口大小。
最小二乘法 曲线拟合
最小二乘法曲线拟合
最小二乘法是一种数学优化技术,它通过最小化预测值与实际观测值之间的平方误差的总和来寻找数据的最佳函数匹配。
在曲线拟合中,最小二乘法被广泛用于拟合一组数据到一个数学模型上,使得这组数据与模型之间的误差的平方和最小。
最小二乘法的核心思想是通过最小化误差的平方和来找到最佳拟合曲线。
具体来说,给定一组数据点 (x1, y1), (x2, y2), ..., (xn, yn),我们需要找到一条曲线 y = f(x),使得所有数据点到曲线的垂直距离的平方和最小。
最小二乘法的应用非常广泛,包括统计学、回归分析、时间序列分析、机器学习和数据挖掘等领域。
通过最小二乘法,我们可以找到最佳拟合曲线,从而更好地理解数据的内在规律和趋势,并进行预测和决策。
在实现最小二乘法时,通常需要选择合适的数学模型和参数,并使用迭代或优化算法来求解最小化问题。
同时,还需要考虑数据的噪声和异常值对拟合结果的影响,以及模型的泛化能力。
基于最小二乘支持向量机的励磁特性曲线拟合
第38卷第11期电力系统保护与控制Vol.38 No.11 2010年6月1日 Power System Protection and Control Jun. 1, 2010 基于最小二乘支持向量机的励磁特性曲线拟合尉军军,全力,彭桂雪,胡海斌(江苏大学电气学院,江苏 镇江 212013)摘要:针对传统支持向量机在电流互感器铁心励磁特性曲线拟合时样本数目较大出现的训练速度慢、占用内存大的问题,提出了一种新的基于最小二乘支持向量机算法。
该算法将实测数据由径向基函数把非线性逼近问题转化为线性逼近问题,依据最小二乘法的思想,利用Matlab7.0求一个线性方程组的解,得到拟合曲线的近似表达式。
实验结果表明,新算法训练速度快,误差小、拟合精度高。
关键词:电流互感器;最小二乘支持向量机;非线性;径向基函数;曲线拟合Curve fitting of excitation characteristics based on the least squares support vector machineWEI Jun-jun,QUAN Li,PENG Gui-xue,HU Hai-bin(Institute of Electric Engineering,Jiangsu University,Zhenjiang 212013,China)Abstract:Aimed at the problems of slow training speed and large memory consumption,which occurs when the traditional support vector machine chooses a larger number of training samples in the excitation characteristics curve-fitting of the iron core of the current transformer,a new algorithm is put forward based on the least squares support vector machine.The algorthm makes the nonlinear approximation problem transform into a linear approximation problem with the radial basis function. Based on the least square principle and by using Matlab7.0 to solve linear equations,approximate expressions can be gotten.The experiment result shows that this new algorithm can improve the speed of training and the accuracy of fitting and reduce the error.Key words:current transformer;LS-SVM;nonlinear;RBF;curve fitting中图分类号:TM771 A文献标识码:文章编号: 1674-3415(2010)11-0015-030 引言关于电流互感器(current transformer,CT)铁心的磁化曲线拟合问题,国内外学者提出了多种方法,较常用的有拉格朗日插值法,最小二乘拟合法、分段线性插值法。
最小二乘曲线拟合
显然, 显然,三种初等变换都是可逆 三种初等变换都是可逆的 可逆的,且其变换是 同一类型的初等变换。 同一类型的初等变换。变换ri↔rj的逆变换就是本 身;变换 rj×k 的逆变换为 rj÷k ;变换 ri+krj 的逆 变换为ri− k rj。 如果 A 经过有限次 经过有限次初等变换变为矩阵 有限次初等变换变为矩阵 B,称矩 阵 A与 B是等价的, 是等价的,记为A~B 。 矩阵的等价关系有如下性质: 矩阵的等价关系有如下性质: 反身性: 反身性: A~ A 对称性: 对称性: A~B ,则B ~ A 传递性: 传递性: A~B, B ~ C,则A ~ C
− x3 = 4 wmw x 1 x2 − x3 = 3 x4 = −3 0=0
(1) r3 − 2×r4 1 (2) r4 ↔ r3 0 ~ 0 (3) 0 (4)
1 1 0 0
−2 −1 0 0
0 0 1 0
1 1 1 0
4 0 −3 0
(1) − (2) − (3) (2) − (3)
(1) ↔ (2) (3) ÷ 2
x1 + x2 − 2 x3 + x4 2 x1 − x2 − x3 + x4 ~ 2 x1 − 3 x2 + x3 − x4 3 x1 + 6 x2 − 9 x3 + 7 x4
x1 + x2 − 2 x3 + x4 −3 x2 + 3 x3 − x4 −2 x + 2 x − 2 x 2 3 4 3 x2 − 3 x3 + 4 x4
ˆ = b1ϕ1 ( x) + b2ϕ 2 ( x) + ⋯ bl ϕl ( x) ) (更一般地, 更一般地,可设 y
汽车驱动力及发动机转矩曲线在python中拟合

汽车驱动力及发动机转矩曲线在python 中拟合确定汽车的动力性就必须掌握沿汽车行驶方向的作用于汽车的各种外力,即驱动力和行驶阻力,今天我们一起学习一下汽车的驱动力。
汽车的驱动力是由汽车发动机产生的转矩,经由传动系传至驱动轮上产生的。
汽车行驶时,作用于驱动轮上的转矩t T 产生一个对地面的圆周力0F ,地面对驱动轮的反作用力t F 即是驱动汽车的外力,称为汽车的驱动力,如下图所示。
rT t t =F公式中,t T 为作用于驱动轮的转矩,r 为车轮半径。
作用于驱动轮上的转矩t T 是由发动机产生的转矩经传动系传至驱动轮的,所以可以得到r i i T T 0g tq t η=F公式中tq T 表示发动机转矩,g i 表示变速器的传动比,0i 表示主减速器的传动比,T η表示传动系的机械功率。
在加速过程的不稳定工况下,发动机所能提供的功率比稳定工况时稍有下降,电喷汽油机比化油器汽油机要下降得更多些。
在进行动力性评估师,一般沿用稳态工况时发动里台架试验所得到的使用外特性中的功率和转矩曲线。
为了便于计算,常采用多项式来描述由试验台测得的,接近于抛物线的发动机转矩曲线。
主要是由最小二乘法来对数据进行拟合,拟合阶数K 随特性曲线而异,一般取值在2至5之间。
下面举一个例子,使用python 进行数据处理。
一款车,试验测得的转矩特性如下: 转速n1000 1500 2000 2500 3000 3500 3800 4000 转矩tq T 135 147 153 157 147 138 133 126 在python 中输入以下代码:import numpy as npimport matplotlib.pyplot as pltnum1= [1000,1500,2000,2500,3000,3500,3800,4000]x = np.array(num1)print('x is :\n',x)num2 = [135,147,153,157,147,138,134,126]y = np.array(num2)print('y is :\n',y)f1 = np.polyfit(x, y, 5)print('f1 is :\n',f1)p1=np.poly1d(f1)print("p1 is :\n",p1)xnew=np.arange(1000,4000,1)ynew=p1(xnew)plot1=plt.plot(x,y,'r*',label='original values')plot2=plt.plot(xnew,ynew,'b',label='polyfit values') plt.xlabel('n')plt.ylabel('Ttq')plt.title('engeneer')plt.legend()plt.show()按F5运行后即可得到以下输出:输出结果就包括了发动机转矩曲线拟合图像及拟合多项式的系数值。
直流伺服电机实验报告_3

直流电机的特性测试一、实验要求在实验台上测试直流电机机械特性、工作特性、调速特性(空载)和动态特性, 其中测试机械特性时分别测试电压、电流、转速和扭矩四个参数, 根据测试结果拟合转速—转矩特性(机械特性), 并以X轴为电流, 拟合电流—电压特性、电流—转速特性、电流—转矩特性, 绘制电机输入功率、输出功率和效率曲线, 即绘制电机综合特性曲线。
然后在空载情况下测试电机的调速特性, 即最低稳定转速和额定电压下的最高转速, 即调速特性;最后测试不同负载和不同转速阶跃下电机的动态特性。
二、实验原理图三、实验操作步骤1.测量直流电机的机械特性和动态特性①首先将负载旋钮逆时针拧至最小, 然后将实验设备面板上的直流电机的电枢电压和电枢电流信号引出, 分别接至计算机的采集数据端口上, 打开计算机中的测试软件, 进入测试界面, 设定每个通道的测量范围。
②系统上电。
③用计算机给定电机的电枢电压信号, 逐渐增加负载(顺时针转动负载旋钮), 选择记录下此过程中的20组数据, 每组数据包括测量电枢电压、测量电枢电流、电机转速和电磁转矩值。
④计算机停止给定电机的电枢电压信号, 系统电源关闭。
2.测量直流电机的调速特性本实验要求测量的是空载下的调速特性, 测量额定电压下的最高转速和最低稳定转速。
步骤如下:①首先将负载旋钮逆时针拧至最小, 然后将实验设备面板上的直流电机的电枢电压信号引出, 接至计算机的采集数据端口上, 打开计算机中的测试软件, 进入测试界面, 设定通道的测量范围。
②利用式(1-7)计算电机额定电压(3V)对应的测量电压值, 为5.16V。
电机实际电压=(前面板测量电压-0.76)*2.75-0.1③系统上电。
④不断改变计算机输出的电机电压信号, 直至测量电压信号的值为5.16V。
记录下此时的转速值, 即为额定电压下的最高稳定转速。
⑤不断减小计算机输出地电机电压信号, 观察转速逐渐减小和稳定的情况, 记录下最低稳定转速值。
基于移动最小二乘法的曲线曲面拟合
基于移动最小二乘法的曲线曲面拟合示例文章篇一:哎呀呀,这题目可把我这个小学生难住啦!什么是移动最小二乘法呀?曲线曲面拟合又是什么东西?我一点儿都不明白!老师在课堂上讲这些的时候,我就像在听天书一样。
我看看周围的同学,有的皱着眉头,有的一脸迷茫,估计和我差不多。
我心里忍不住想:“这东西怎么这么难呀,难道是要故意为难我们吗?”我回家问爸爸妈妈,他们看着我,也是一脸无奈。
爸爸说:“孩子,这对爸爸来说也太复杂啦!”妈妈接着说:“宝贝,妈妈也搞不懂呢。
”后来在学校,我和同桌小明一起讨论。
我问他:“小明,你懂移动最小二乘法的曲线曲面拟合吗?”小明摇摇头说:“不懂,感觉像外星语言。
” 我们俩你看看我,我看看你,都忍不住笑了。
我就一直在想,这就好像是一个超级大的迷宫,我们怎么都找不到出口。
数学的世界有时候真的好奇怪呀,一会儿是简单的加减乘除,一会儿又冒出这么难的东西。
这移动最小二乘法的曲线曲面拟合,难道是数学王国里的大怪兽,专门来拦住我们前进的路?老师为了让我们明白,在黑板上画了好多图,讲了好多遍。
可我还是似懂非懂的。
我多希望能有一把神奇的钥匙,一下子就能打开这个知识的大门,让我清楚地看到里面到底是怎么回事。
我又去问班上的数学小天才小刚,我说:“小刚,你给我讲讲呗。
”小刚很耐心地跟我说:“其实吧,就是用一种特别的方法去把一些曲线和曲面弄明白。
” 我着急地问:“那到底怎么弄明白呀?”小刚挠挠头说:“哎呀,我也说不太清楚。
”我觉得吧,学习这个就像爬山,我们一直在努力往上爬,可这座山好高好高,爬得好累呀!但我可不会轻易放弃,我一定要弄明白这个移动最小二乘法的曲线曲面拟合到底是怎么回事!我相信,只要我一直努力,总有一天能征服这座知识的大山!示例文章篇二:哎呀呀,这题目可把我难住啦!什么是移动最小二乘法的曲线曲面拟合呀?对于我这个小学生来说,简直就像是外太空的神秘语言!老师在课堂上讲这个的时候,我看好多同学都一脸懵。
我心里就在想:“这东西难道比孙悟空的七十二变还难?” 我瞪大眼睛,努力想听明白,可那些复杂的公式和概念就像调皮的小猴子,在我脑子里上蹿下跳,就是不让我抓住它们。
列车牵引与制动
引言 - 列车牵引计算学
列车牵引计算的作用
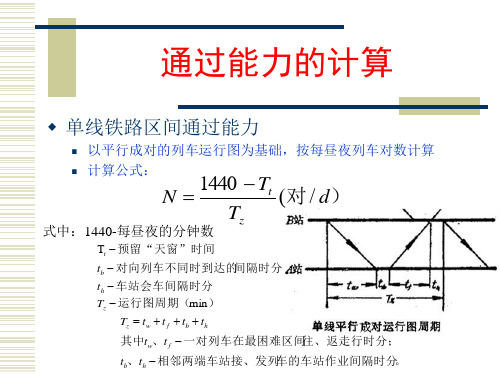
铁路新线设计与既有线加强设计所必须掌握的基础知识之一 为计算铁路运输能力和运输成本,分析和研究提高运输质量,保证行车
安全以及为机车车辆的设计和改善工作性能提供相关资料
列车牵引计算学
一门不断完善充实的铁路应用科学
研究对象 作用于列车上的力 力与列车运动的关系 研究和解决一系列实际问题,如牵引质量计算、列车运行速度与运行 时分计算、能耗计算以及解决制动问题和其他铁路设计问题
1988年停产,仅在次要线路和地方铁路上使用
牵引动力的发展方向
采用大功率的内燃、电力机车牵引
机车类型
铁路线路设计的主要技术标准之一
机车类型
电力机车 特点 热效率高、功率大、速度高、起动快、不污染环境、乘务 条件好 无需燃料供应,整备一次作业运行距离长,机车利用率高 需要供电设备、工程投资大、机车独立性稍差 适用范围 高速铁路、快速铁路、运煤专线、繁忙干线挤长大坡道、 长隧道、高海拔地区等线路 常见型号
其中,A、B、C为试验测定的常数。
基本阻力的表达方法
试验分析
大量试验表明,作用在机车、车辆上的阻力与其质量有关 (成正比)
牵引计算中采用由试验得出的单位阻力的计算公式
基本阻力 单位基本阻力
基本阻力的表达方法
机车单位基本阻力 牵引运行 w0
不考虑机械阻力
惰力运行 w0 d
包括机械阻力
电力机车 受牵引电动机工作性能限制的轮周牵引力 受轮轨间粘着作用限制的轮周牵引力
内燃机车 受柴油机功率限制的轮周牵引力 受传动装置工作性能限制的轮周牵引力(电传动装置/液力传动 装置) 受轮轨间粘着作用限制的轮周牵引力
应用
提供不同速度(工况)下的牵引力大小
智慧职教牵引运用课程设计考试网课答案
5 摩擦制动分为制动、制动和电磁轨道制动。 填空一
闸瓦 填空二
盘形 参考答案: 填空 一
闸瓦 填空 二 闸片
1.(10 分) 单选题
10 我国目前各型车辆的闸瓦压力的加权平均值约为()。 A 20N/kN B 25N/kN C 30N/kN D 35N/kN 参考答案: B 解析: 想看答案的同学,你们想多了! 2.(10 分) 单选题
21.5 填空二
121 参考答案: 填空 一 21.5 填空 二 21 解析: 这里只有解析,或者什么也没有,想看答案么? 10.(10 分)填空题(客观)
5 列车换算制动率 ϑh 是列车与列车之比。 填空一
列车总换算闸瓦压力 填空二
重力 参考答案: 填空 一 总换算闸瓦压力 填空 二 重力 解析: 答对了?恭喜你,还有几个题
1.(10 分) 单选题
10 解算列车进站制动时,列车换算制动率一般取全值的 ()。 A 0.4 B 0.5 C 0.6 D 0.7 参考答案: B 解析: 想看答案的同学,你们想多了!
2.(10 分) 单选题
10 依靠机车的动力机械通过传动装置产生的制动力称为()制动力。 A 液力 B 常用 C 机械 D 动力 参考答案: D 解析: 这都不会,没好好看 PPT 吧 3.(10 分) 单选题
10 在用换算法计算制动力时,不需要将各型车辆的实际闸瓦压力换算成换算闸瓦压力。 A) 正确 B) 错误 参考答案: B 解析: 由于实际运行中的列车是由各种类型的车辆混编而成的,不同类型的车辆实际闸瓦压力不
同,在用换算法计算制动力时,还需要先将各型车辆的实际闸瓦压力换算成换算闸瓦压 力 8.(10 分)判断题
基于移动最小二乘法的曲线曲面拟合_曾清红
收稿日期:2002-10-21 基金项目:国家自然科学基金资助项目(10102020) ;国家 973 资助项目(G1999032805) 作者简介:曾清红(1978-) ,男,湖南长沙人,硕士生,主要研究领域为大规模科学计算及科学计算可视化。
第 1 期 曾清红等:基于移动最小二乘法的曲线曲面拟合 ・85・
x 的 函 数 。
待 求 系 数 , 它 是 坐 标
p( x ) = [ p1 ( x ), p2 ( x ),Λ , pm ( x )]T 称为基函数, 它
是一个 k 阶完备的多项式,m 是基函数的项数。例 如,对于二维问题, 线性基
需要注意的是即使基函数 p(x)为多项式,式 ( 9 )中的 f (x) 也不再是多项式。如果基函数
第 1 期 曾清红等:基于移动最小二乘法的曲线曲面拟合 ・87・
2.0
16 14
1.5
12
拟合曲线 拟合 曲 线
0.0 0.2 0.4 0.6 0.8 1.0
权函数 权函数
10 8 6 4 2
1.0
0.5
0.0 0 0.0 0.2 0.4 0.6 0.8 1.0
x
smax
权函数
X
图1
影响区域
图2
三次样条权函数
2 移动最小二乘拟合流程
使用移动最小二乘法进行曲线曲面拟合的基 本思想是先将拟合区域网格化,然后利用公式(9)
表1
求出网格点上节点值, 最后连接网格节点形成拟合 曲线(曲面)。表 1 给出了使用移动最小二乘法进行 曲线曲面拟合的程序设计流程。
基于移动最小二乘法的曲线曲面拟合程序设计流程
p ∈ C r , 权 函 数 w∈Cs , f ∈ C min( r , s ) 。Fra bibliotek1.2 权函数
机车牵引力与牵引特性—电力机车牵引力与牵引特性

机车牵引力与牵引
牵引特性曲线示例
特性曲线
调压控制方式的SS3型电力机车;恒流准恒速控制方式的SS8、 SS7E型电力机车。
机车牵引力与牵引
二、现阶段我国机车牵引特性曲线基本形式和包含信息
特性曲线
我国现有机车牵引特
性曲线大致可分为两类,
主要由机车特性决定。
机车牵引力与牵引
电力机车。
其轮周牵引力与运行速度之间的关
系分为两为机车达到其转折速度的
斜线段,即准恒速控制段。
机车牵引力与牵引
按上下行方向列车数目不同
特性曲线
采用“恒流准恒速”的调速方式,其牵引特
性曲线图是直线加折线构成。
一般情况下,其上所标“级位”数字乘以
10,就是该级位所要控制的“目标速度”。
搞清楚这一点,能够提前预知机车要达到的目
标速度,对机车操纵是很有帮助的。
例如:SS8型机车,手柄放在10位,司机就
可知其目标速度最终达到100km/h。其他机
车也同样能预知其目标速度。
将机车牵引力和黏着牵引力与速度的关系绘在一张图上,构成机车牵引特性曲
线。机车的牵引特性曲线一般由专门试验得出。未经试验的新造机车,可参考由生
产厂家提供的通过理论计算得出的“预期特性”曲线。
教材 图1-6 和 图1-7 是“预期特性”曲线。图1-12 至 图1-37 分别是由《牵
规》公布的各型电力机车牵引特性曲线(这些特性曲线是通过型式试验得到的,有
其牵引特性曲线图上所标的级位是“名义级
位”。实际上级位是连续(无级)的。
机车牵引力与牵引
特性曲线应用
目录
CONTENTS
01
机车牵引特性与牵引特性曲线
最小二乘法求作拟合直线_解同信
收稿日期:2006-05-22作者简介:解同信(1949-),男,山西矿业学院煤矿机械化专业毕业,高级工程师,副教授。
最小二乘法求作拟合直线解同信(北京工业职业技术学院,北京100042)摘 要:静态测试中,检测系统可以在一定的区间内用一个线性函数表达测试数据的变化规律,确定此线性函数即拟合直线的方法常采用最小二乘法。
机械工程中,通过对应变测试可以分析与研究零件或结构的受力状况以及工作状态。
根据实验输入输出测试数据,用最小二乘法求解拟合直线方程,以此计算的测量误差,均未超出测试数据的极限偏差。
关键词:最小二乘法;拟合直线;输入输出特性;检测系统中图分类号:TH123 文献标识码:B 文章编号:1671-6558(2006)03-05-03Straight Line Fitted by Minimum Two MultiplicationsXie Tongxin(Beijing Vocational &T echnical Institute of Industry,Beijing 100042,China)Abstract:The linear function can ex press the transformation rule of test data in a definite range in check system.T he method of fitting the straight line or experience formula is usually the minimum two multiplications.T he enduring and w orking state of the parts and its structure can be analyzed and researched by testing in mechanical eng ineering.T he ex periments can input and output testing data and we can get the result of the beeline equation by the m inim um tw o multiplications.T he deviation calculated this w ay does not overstep the limit w indage of testing data.Key words:minimum two multiplication;fitting straight line;input &output characteristics;examination sys -tem0引言许多工程问题,常常需要根据两个变量的几组实验数据,找出这两个变量的函数关系式,将这样得到的近似表达式称为经验公式。
《电力机车牵引计算》填空题与简答题

《电力机车牵引计算》填空题与简答题一、填空题:1、《列车牵引计算》是专门研究铁路列车在外力的作用下,沿轨道运行及其相关问题的实用学科。
它是以力学为基础,以科学实验和先进操纵经验为依据,分析列车运行过程中的各种现象和原理,并以此解算铁路运营和设计上的一些主要技术问题和技术经济问题。
2、机车牵引力(轮周牵引力)不得大于机车粘着牵引力,否则,车轮将发生空转。
3、机车牵引特性曲线是反映了机车的牵引力和速度之间的关系。
在一定功率下,机车运行速度越低,机车牵引力越大。
4、列车运行阻力可分为基本阻力和附加阻力。
(基本附加)5、列车附加阻力可分为坡道附加阻力、曲线附加阻力和隧道空气附加阻力。
6、列车在6‰坡道上上坡运行时,则列车的单位坡道附加阻力为6N/kN7、列车在2‰坡道上下坡运行时,则列车的单位坡道附加阻力为-2N/KN 。
8、在计算列车的基本阻力时,当货车装载货物不足标记载重50%的车辆按空车计算;当达到标记载重50%的车辆按重车计算。
9、列车制动力是由制动装置引起的与列车运行方向相反的外力,它的大小可由司机控制,其作用是调节列车速度或使列车停车。
10、轮对的制动力不得大于轮轨间的粘着力,否则,就会发生闸瓦和车轮“抱死”滑行现象。
11、目前,我国机车、车辆上多数使用高磷闸瓦闸瓦。
12、列车制动一般分为紧急制动和常用制动。
13、列车制动力是由列车中各制动轮对产生的制动力的总和。
14、列车单位合力曲线是由牵引运行、惰性运行和制动运行三种曲线组成。
15、作用于列车上的合力的大小和方向,决定着列车的运动状态。
在某种工况下,当合力大于零时,列车加速运行;当合力小于零时,列车减速运行;当合力等于零时,列车匀速运行。
16、加算坡道阻力与列车运行速度无关。
(无关)17、列车运行时间的长短取决于列车运行速度和作用在列车上单位合力的大小。
18、在某工况下,当列车所受单位合力为零时对应的运行速度,为列车的均衡速度。
列车将匀速运行。
串补电容线路中故障位置识别新方法
串补电容线路中故障位置识别新方法作者:毕洁廷来源:《数字技术与应用》2011年第07期摘要:本文首先指出串补电容给输电系统带来巨大好处,同时增加了距离保护系统判断故障位置的难度与复杂性,为了准确判断故障位置,本文在输电线路R-L参数模型的基础上,列出故障线路电压方程组,应用最小二乘法原理,估计出方程组中相应的参数值,依据此参数值确定故障位置,原理分析和EMTP仿真表明,此方法不受串补电容在输电线路中的位置及其补偿度的影响,具有较高的可靠性和实际应用价值。
关键词:串补电容输电线路最小二乘法 R-L模型 EMTP仿真中图分类号: TM773 文献标识码:A 文章编号:1007-9416(2011)07-0095-02由于交流输电线路的阻抗特性呈感性,在线路上增加串补电容以后,利用串联电容器的容性特性,补偿输电线路的部分感性阻抗,从而相当于缩短了输电线路的电气距离,进而提高输电系统的传输容量,提高网络实际输送能力。
应用于长距离大容量输电线路除能够扩大线路输送容量和提高线路潮流输送能力外,还能够增加输电线路稳定裕度,改善联网负荷分配,改善系统稳定性[1]。
但是,串联电容在输电线路上的应用所带来的问题同样不容忽视,如电压和电流的反向问题,引入暂态分量(高频和低频分量),次同步谐振等[2]从而增加了继电保护系统尤其是距离保护系统判断故障的难度与复杂性[3]。
原有的距离保护系统在串补线路及其相邻线路上是否适用,还需要重新论证和实践证明。
在距离保护中,串补电容安装位置的不同、补偿度的不同以及故障点和串补电容相对位置的不同都将对其产生进一步的影响,甚至原有输电线路距离保护的动作判据已不适用于串补电容线路,需要重新论证和实践证明。
下面将给出一种故障位置识别新方法,此方法应用最小二乘法原理[4,5],构造出含有若干个参数的方程组,其中参数x即为故障位置,然后用EMPT进行仿真验证。
1、基于R-L线路模型的故障位置识别由于串补电容一般安装在输电线路中间,所以本文以串补电容安装在线路中间位置且以单相接地短路故障为例(如图2-1)。
第二章 牵引计算

滚动轴承:w0”=(0.92+0.0048V+0.000125V2)g
列车基本阻力与列车平均单位基本阻力 列车基本阻力W0为机车基本阻力W0’和车辆基本阻力W0”之和,即:
内燃机车牵引力受内燃机功率、 传动装臵及轮轨间粘着力的限 制。 电传动内燃机车牵引特性曲线 粘着牵引力 机车柴油机和传统装臵的牵 引力 机车牵引力修正:
FX F h p s
——周围空气温度修正、海拔修 正、隧道修正。
二、列车运行阻力
列车阻力是机车阻力和车辆阻力之和。 试验表明:作用在机车、车辆上的阻力与其质量成正 比,故在牵引计算中采用单位阻力(单位机车或车辆 质量所受的阻力)来计算总阻力。 按阻力性质分为三类: 1、基本阻力:列车在空旷地段,沿平直轨道运行时遇 到的阻力。(在列车运行中总是存在) 2、附加阻力:列车在线路上运行时受到的额外阻力, 如坡道阻力、曲线阻力、隧道阻力等。(平纵断面决 定,具体情况具体计算) 3、起动阻力:列车起动时的阻力。
4、起动阻力
机车、车辆停留时,轴颈与轴承之间润滑油被挤出, 油膜减薄;同时,轴箱内温度降低,油的黏度增大, 故启动时,轴颈与轴承的摩擦阻力增大。此外,车轮 压在钢轨上产生的凹形变形比运行时大,增加了滚动 阻力。同时,列车起动时,要求有较大的加速力以克 服列车的静态惯性力。 ' wq 5 g ( N / t ) 机车单位起动阻力 货车单位起动阻力 " wq 3.5g ( N / t ) 滚动轴承货车 " 滑动轴承货车 wq 3 0.4iq g ( N / t )
基于移动最小二乘法的列车牵引特性曲线拟合
科研探索知识创新与109——科协论坛・2013年第01期(下)——基于移动最小二乘法的列车牵引特性曲线拟合□赵笑龙徐中伟朱龙(同济大学上海201804)摘要:为了精确地得到列车运行时产生的牵引力,需对列车牵引特性曲线进行拟合。
详细阐述移动最小二乘法的基本原理,并以6K 型电力机车为例,分别使用分段最小二乘法和移动最小二乘法进行列车牵引特性曲线的拟合,并将拟合的结果进行对比,通过分析误差的大小及曲线的平滑性,表明该方法的优越性和有效性。
关键词:移动最小二乘法牵引特性曲线曲线拟合中图分类号:O241.5文献标识码:A文章编号:1007-3973(2013)001-109-031引言曲线拟合在工程设计、计算机图形等方面有着广泛的应用。
城市轨道列车牵引力的计算一般分为图解法和分析法,分析法是直接根据物理公式进行计算,求出牵引力,而图解法是通过对牵引特性曲线的拟合,来得到牵引力。
由于关于列车牵引力计算的大量公式都是通过经验得来的,因此用公式计算法并不比用图解法得到的结果精确度高。
所以我们经常通过图解法来得到列车的牵引力。
可以通过测量得到一组关于速度与牵引力的数据点(),i =1,2…n ,由于不知道牵引特性曲线的原型函数f (x ),而且测量数据点也必然会有误差,因此可以根据离散数据点作出拟合曲线。
曲线拟合方法中多使用传统的最小二乘法,即求解一个方程组,使得曲线的误差平方和最小。
通过求解该方程组,即可得到期望的拟合曲线。
但是传统最小二乘法在拟合的过程中有着较大的计算量,并且在数据量比较大的时候,由于形状比较复杂,可能需要分段拟合,这样会造成拟合曲线的不连续。
为了克服上述缺点,本文将使用移动最小二乘法(MLS )来拟合列车牵引曲线。
2移动最小二乘法(MLS )的逼近原理本节主要介绍移动最小二乘法(MLS )的基本原理及其数学表达,以任一计算点处拟合系数的计算为例,来解释移动最小二乘法(MLS )的处理方式及思想。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
科研探索知识创新与109——科协论坛・2013年第01期(下)——基于移动最小二乘法的列车牵引特性曲线拟合□赵笑龙徐中伟朱龙(同济大学上海201804)摘要:为了精确地得到列车运行时产生的牵引力,需对列车牵引特性曲线进行拟合。
详细阐述移动最小二乘法的基本原理,并以6K 型电力机车为例,分别使用分段最小二乘法和移动最小二乘法进行列车牵引特性曲线的拟合,并将拟合的结果进行对比,通过分析误差的大小及曲线的平滑性,表明该方法的优越性和有效性。
关键词:移动最小二乘法牵引特性曲线曲线拟合中图分类号:O241.5文献标识码:A文章编号:1007-3973(2013)001-109-031引言曲线拟合在工程设计、计算机图形等方面有着广泛的应用。
城市轨道列车牵引力的计算一般分为图解法和分析法,分析法是直接根据物理公式进行计算,求出牵引力,而图解法是通过对牵引特性曲线的拟合,来得到牵引力。
由于关于列车牵引力计算的大量公式都是通过经验得来的,因此用公式计算法并不比用图解法得到的结果精确度高。
所以我们经常通过图解法来得到列车的牵引力。
可以通过测量得到一组关于速度与牵引力的数据点(),i =1,2…n ,由于不知道牵引特性曲线的原型函数f (x ),而且测量数据点也必然会有误差,因此可以根据离散数据点作出拟合曲线。
曲线拟合方法中多使用传统的最小二乘法,即求解一个方程组,使得曲线的误差平方和最小。
通过求解该方程组,即可得到期望的拟合曲线。
但是传统最小二乘法在拟合的过程中有着较大的计算量,并且在数据量比较大的时候,由于形状比较复杂,可能需要分段拟合,这样会造成拟合曲线的不连续。
为了克服上述缺点,本文将使用移动最小二乘法(MLS )来拟合列车牵引曲线。
2移动最小二乘法(MLS )的逼近原理本节主要介绍移动最小二乘法(MLS )的基本原理及其数学表达,以任一计算点处拟合系数的计算为例,来解释移动最小二乘法(MLS )的处理方式及思想。
设全局近似函数为(x ),则它在点x 的局部近似为(1)其中:(x )(i =1,2,…,m )是m 次完备单项式基函数,是相应的系数,这些系数是空间坐标x 的函数。
基函数(x )常取单项式,在一维问题中:线性基:()=[1],=2(2)二次基:()=[12],=3(3)为了体现不同节点对计算点的影响,引入了权函数,它是一个紧支撑函数,只和以i 为中心的有效区域内的结点值相关,并与节点到计算点的距离有关。
其中,高斯型、紧支撑径向基函数、样条函数和指数型是常用的权函数。
在移动最小二乘法(MLS )的中,的选取使近似函数在计算点x 领域内对待求函数f (x )的局部逼近误差最小。
定义(4)令J 取最小值,则(5)由此可得(6)将式(4)写为矩阵形式,可以得到()=1()()(7)其中(8)()=[(-1)(1),(-2)(2),…,(-)()(9)=[(1),(2),…,()](10)()=1(),2(),…,()(11)可见,点x 处的系数有两方面决定:一是该节点值,二是它的权函数。
对不同的节点,随着权函数的变化,系数也跟着不停地变化,相应的近似函数表示为()=()()=()1()()(o )(12)将移动最小二乘法(MLS )和分段最小二乘法的拟合进行对比,可以发现:分段拟合是将节点域分成了若干段,这就等于对分段的节点分别加权;并且在每个分段内,各节点对拟合系数有着相同的影响,即加权函数取为矩形。
而在移动最小二乘法(MLS )中,通过引入紧支撑权函数,对每个计算点附近的节点进行加权,计算点即为中心点,权函数的支撑域即为对中心点有影响的点的范围,随着计算点的改变,权函数的支撑域不断地移动;同时,在每个权函数内,各节点对于计算点的影响与权函数取值有关,因此权函数可以发挥一个软分段的作用。
3移动最小二乘法(MLS )的实施方案在进行移动最小二乘法(MLS )拟合时,根据具体情况的不同,主要要考虑两方面的因素:(1)基函数的选择:基函数可以分为线性基、二次基和高次基。
通常,拟合曲线的平滑性会随着基函数次数的增高越来越好,但是,它会造成就计算量的急剧增大,并且还有可能会出现拟合方程组病态的情况。
因此,在拟合过程中,最多取三次基。
本文将选择二次基进行实验仿真。
(2)权函数的选择:在移动二乘法中,权函数起着至关重要的作用。
移动二乘法中的权函数需要满足以下条件:1)在支撑域内,(-)>0;与((-||的单调递减函数;5)连续可导的函数。
指数型、高斯型和紧支撑径向基函数是常用的权函数。
本文将采用较为常见的高斯型函数为例进行说明,该函数的表达式为(13)其中,是距离相对量,=||ÿ¸ö½ÚµãµÄȨº¯ÊýµÄ×÷Óð뾶¡£È¨º¯ÊýÓÐÁ½¸öÖ÷ÒªµÄ²ÎÊý£ºÒ»¸öÊÇÖ§³ÅÓòµÄ°ë¾¶£¬ÁíÒ»¸öÊǺ¯ÊýµÄÐÎ̬¡£Ò»°ãÀ´Ëµ£¬(·´Ó³È¨º¯ÊýµÄÐÔ̬£¬Ò²ÌåÏÖÁËÖ§³ÅÓòÄÚ¸÷½Úµã¶Ô¼ÆËã½ÚµãµÄÓ°Ïì³Ì¶È£¬Ôö¼Ó((=4,科研探索知识创新与111——科协论坛・2013年第01期(下)——因此可以推广到其他领域数据拟合中。
(基金项目:国家自然科学基金项目(2011BAG01B00))参考文献:[1]刘晓娟,张雁鹏,汤自安.城市轨道交通智能控制系统[M ].北京:中国铁道出版社,2008.[2]郭凤鸣,张水英.分块最小二乘群面拟合通用程序[J ].电脑学习,1990(1):40-41.[3]吴汉麒.城市轨道交通信号与通信系统[M ].北京:中国铁道出版社,2001.[4]乔立山,王玉兰,曾锦光.实验数据处理中曲线拟合方法探讨[J ].成都理工大学学报,2004,31(1):91-95.[5]Marcos Vanella.A moving least s quares reconstruction for embedded-boundary formulations [J ].Journal of Comput at-ional Physics,2009,228(18):6617-6628.[6]Rail Transit Vehicle Interface Standards Committee of the IEEE Vehicular Technology Society.IEEE Std 1474.3-2008,IEEE Recommended Practice for Communications-Based Train Control (CBTC )System Design and Functional Alloc-ations,2008.[7]Rail Transit Vehicle Interface Standards Committee of the IEEE Vehicular Technology Society.IEEE Std 1473-1999,IEEE Standard for Communications Protocol Aboard Trains,1999.在线学习算法的一致性分析□郭芹(济南大学泉城学院山东・烟台265600)摘要:对统计学习理论的研究背景和发展历史进行介绍,总结前人有关基于核的正则化学习算法的研究动态以及已取得的成果。
给出正则化在线学习算法的定义,针对不同的抽样背景得出研究正则化在线学习算法的一致性及误差界的方法。
关键词:统计学习理论正则化样本误差逼近误差中图分类号:O241.3文献标识码:A文章编号:1007-3973(2013)001-111-021统计学习理论的发展历史及数学基础统计学习理论是机器学习的一个重要分支,它为人们系统地研究小样本情况下机器学习问题提供有力的理论基础。
它的统计推理规则不仅考虑了对渐近性能的要求,而且希望在现有有限信息的条件下得到最优结果。
统计学习理论的基本内容诞生于20世纪六、七十年代,到90年代中期发展到比较成熟。
从六、七十年代开始,Vapnik 等人致力于此方面研究,90年代中期,Vapnik 等又提出了用于模式识别的支持向量机(SVM )见参考文献[1]、[2],还产生了经验风险最小化原则(Empirical Risk Minimizing ,ERM )的理论,解决不适定问题(ill-posed problem )的理论,算法复杂度的思想等,此时统计学习理论获得了最大的发展。
机器核学习的假设空间一般采用再生核Hilbert 空间。
T Evgeniou ,M Pontil 和T Poggio 说明了调控网络建构和支持向量机是解决学习问题的技巧,特别是由稀疏数据逼近多维函数的回归问题。