气动阀门定位器工作原理..
气动阀门定位器工作原理
气动阀门定位器工作原理
首先,当输入气动信号进入定位装置时,它会经过一个阀门控制单元
进行处理。
这个单元可以根据输入的信号来控制气体流量和压力,从而控
制最终的阀门位置。
然后,处理好的气动信号进入气动执行器,这是一个装有活塞和弹簧
的设备。
当气动信号进入气动执行器时,气体通过进气口进入活塞腔体。
如果气动信号是一个正常工作信号,那么活塞会根据进入的气体压力产生
相应的推力来改变阀门的位置。
当气动信号增大时,活塞腔体内的气压也会随之增加,并且活塞会受
到这些增加的压力的作用而向下移动,推动阀门开启。
相反,当气动信号
减小时,气腔中的气压也会减小,活塞会受到减小的压力的作用而向上移动,使阀门关闭。
同时,为了确保阀门的稳定性和精确度,气动执行器还配备了一个弹簧。
这个弹簧的作用是在气动信号不存在或异常时,提供一个恢复力来保
持阀门的关闭或开启状态。
最后,在气动执行器的底部还配备了一个阻尼装置,可以提供额外的
稳定性和减少震动。
这个阻尼装置是通过控制气腔中的气体流动来实现的,它可以使气动执行器的运动更加平滑和稳定。
综上所述,气动阀门定位器的工作原理是通过将输入的气动信号转化
为机械力来控制阀门的开闭程度。
它通过气动执行器和定位调节装置的配合,可以精确控制阀门的位置,从而实现对流体的准确控制。
气动阀门定位器的工作结构原理说明 定位器工作原理

气动阀门定位器的工作结构原理说明定位器工作原理(一)工作原理气动阀门定位器是气动调整阀的紧要附件和配件之一,起阀门定位作用。
气动阀门定位器是按力矩平衡原理工作的,当通入波纹管的信号压力加添时,使主杠杆绕支点转动,使喷嘴挡板靠近喷嘴,喷嘴背压经单向放大器放大后,通入到执行机构薄膜室的压力加添,使阀杆向下移动。
并带动反馈杆绕支点转动,反馈凸轮也随之作逆时针方向转动,通过滚轮使副杠杆绕支点转动,并将反馈弹簧拉伸,弹簧对主杠杆的拉力与信号压力用在波纹管上的力达到力矩平衡时,仪表达到平衡状态。
执行机构的阀位维持在确定的开度上,确定的信号压力就对应于确定的阀位开度。
以上作用方式为正作用,若要更改作用方式,只要将凸轮翻转,A向变成B 向等,即可。
所谓正作用定位器,就是信号压力加添,输出压力亦加添;所谓反作用定位器,就是信号压力加添,输出压力则削减。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
(二)结构原理气动阀门定位器接收来自掌控器或掌控系统中4~20mA等弱电信号,并向气动执行机构输送空气信号来掌控阀门位置的装置。
其与气动调整阀配套使用,构成闭环掌控回路。
把掌控系统给出的直流电流信号转换成驱动调整阀的气信号,掌控调整阀的动作。
同时依据调整阀的开度进行反馈,使阀门位置能够按系统输出的掌控信号进行正确定位。
(三)紧要功能气动阀门定位器与气动执行机构共同构成自控单元和各种调整阀连接经过调试安装后,组合成气动调整阀。
用于各种工业自动化过程掌控领域当中。
定位器的安装怎样?智能阀门定位器为环路供电设备,能够驱动线性和90、旋转气动阀门。
4—20mA输入信号确定阀门的设定点。
精准明确的掌控通过阀位反馈实现—自动更改空气输出压力以克服阀杆摩擦力和流体的力的作用,维持所需要的阀位。
阀位通过连续的行程%数字显示。
阀位反馈通过基于霍尔效应的非接触技术获得。
气动阀定位器工作原理
气动阀定位器工作原理
气动阀定位器是一种用于控制气动阀门开度的设备,它通过感知气动阀门的位置并发送相应的控制信号,从而实现对阀门的精确控制。
气动阀定位器的工作原理如下:
1. 传感器检测:气动阀定位器通常搭载了一个位置传感器,用于检测阀门的实际位置。
传感器可以是接近开关、线性位移传感器或编码器等。
当阀门开度发生变化时,传感器会相应地感知到位置变化。
2. 反馈信号:传感器检测到的位置信息会被转化为电信号,并传送到控制系统中。
这个反馈信号告诉控制系统当前阀门的开度情况,方便后续控制操作。
3. 控制信号:控制系统根据所设定的阀门开度目标值,与传感器反馈的实际开度进行比较。
如果实际开度与目标值不一致,控制系统会生成相应的控制信号。
4. 气动执行器:控制信号将被传送到气动执行器中,从而驱动阀门的位置调整。
气动执行器通常是一个气动活塞,根据控制信号的不同,活塞会向前或向后运动,以改变阀门的开度。
5. 定位调节:通过不断生成控制信号,控制系统将持续地调整气动执行器的动作,直至阀门的实际开度与目标值一致。
这样就实现了精确的阀门定位控制。
综上所述,气动阀定位器通过传感器感知阀门位置,控制系统生成相应的控制信号,驱动气动执行器调整阀门位置,实现对阀门开度的精确控制。
这种工作原理可以广泛应用于工业自动化系统中的流体控制过程。
阀门定位器的工作原理

阀门定位器的工作原理
阀门定位器是一种用于确定阀门开闭状态的设备,其工作原理如下:
1. 传感器感知:阀门定位器通过内置的传感器,感知阀门是否处于开启或关闭状态。
传感器可以是物理接触式的,也可以是非接触式的,如光电传感器或磁力传感器。
2. 信号传输:一旦传感器感知到阀门状态的变化,它会将相应的信号传输给阀门定位器的控制单元。
这些信号可以是电信号、光信号或其他类型的信号,取决于传感器的类型和设备的设计。
3. 数据分析:控制单元接收到传感器发送的信号后,会对信号进行数据分析和处理。
它会判断阀门是处于正常开启状态、正常关闭状态还是在中间位置,即半开或半关状态。
4. 显示和输出:一旦控制单元完成数据分析,它会将结果显示在设备的显示屏上,以便操作员准确了解阀门的开闭状态。
此外,阀门定位器还可以通过电子输出信号,将阀门状态信息传输给其他控制系统或记录设备,以实现进一步的处理或监控。
总的来说,阀门定位器通过传感器感知阀门的开闭状态,将信号传输给控制单元进行数据分析和处理,然后将结果显示或输出,帮助操作员准确了解和控制阀门的位置。
气动阀门定位器的工作原理

气动阀门定位器的工作原理
气动阀门定位器是按力平衡原理工作的,实现由输入的4~20mA电流信号控制气动阀门由0~100%的开启度。
其工作原理如下(见图1】。
当需要增加阀门开启度,计算机控制系统的输出电流信号就会上升,力矩马达1产生电磁场,挡
板②受电磁场力远离喷嘴③。
喷嘴③和挡板②间距变大,排出放大器④内部的线轴⑤上方气压。
受其影响线轴⑤向右边移动,推动挡住底座⑦的阀芯⑧,气压通过底座⑦输入到执行机构⑩。
随着执行机构气室11 内部压力增加,执行机构推杆12下降,通过反馈杆13把执行机构推杆
12的位移变化传达到滑板14。
这个位移变化又传达到量程15反馈杆,拉动量程弹簧16。
当量程弹簧16和力矩马达①的力保持平衡时,挡板②回到原位,减小与喷嘴③间距。
随着通过喷嘴③排出空气量的减小,线轴⑤上方气压增加。
线轴⑤回到原位,阀芯⑧重新堵住底座⑦,停止气压输入到执行机构⑩。
当执行机构⑩的运动停止时,定位器保持稳定状态。
几种阀门定位器工作原理的介绍
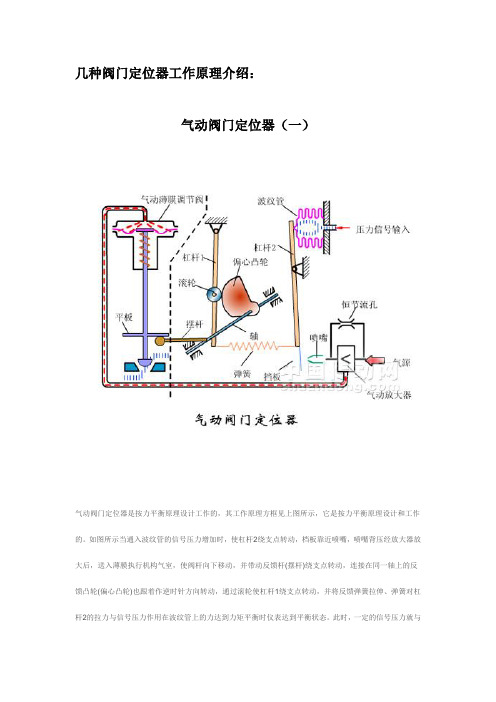
几种阀门定位器工作原理介绍:气动阀门定位器(一)气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。
如图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。
此时,一定的信号压力就与一定的阀门位置相对应。
以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。
所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
气动阀门定位器(二)气动阀门定位器是一种将电气信号转换成压力信号的转换装置,以压缩空气或氮气为工作气源来控制工业炉调节阀的开度大小。
普遍用于工业炉温度自动控制系统中对气动阀门执行机构的连续控制。
气动阀门定位器是按力平衡原理工作的,实现由输入的4~20mA电流信号控制气动阀门由0~100%的开启度。
其工作原理如下图。
当需要增加阀门开启度,计算机控制系统的输出电流信号就会上升,力矩马达①产生电磁场,挡板②受电磁场力远离喷嘴③。
喷嘴③和挡板②间距变大,排出放大器④内部的线轴⑤上方气压。
受其影响线轴⑤向右边移动,推动挡住底座⑦的阀芯⑨,气压通过底座⑦输入到执行机构⑩。
随着执行机构气室⑩内部压力增加,执行机构推杆⑥下降,通过反馈杆⑩把执行机构推杆@的位移变化传达到滑板⑩。
这个位移变化又传达到量程④反馈杆,拉动量程弹簧16。
当量程弹簧16和力矩马达①的力保持平衡时,挡板②回到原位,减小与喷嘴③间距。
阀门定位器工作原理及作用 定位器技术指标

阀门定位器工作原理及作用定位器技术指标电气阀门定位器是气动调整阀紧要附件之一,通常与气动调整阀配套使用,它接受调整器的输出信号,然后以它的输出信号去掌控气动调整阀,当调整阀动作后,阀杆的位移又通过机械装置反馈到阀门定位器,阀位情形通过电信号传给上位系统。
电气阀门定位器工作原理电气阀门定位器是掌控阀的紧要附件。
它将阀杆位移信号作为输入的反馈测量信号,以掌控器输出信号作为设定信号,进行比较,当两者有偏差时,更改其到执行机构的输出信号,使执行机构动作,从而建立阀杆位移与掌控器输出信号之间的对应关系。
因此,阀门定位器构成以阀杆位移为测量信号,以掌控器输出为设定信号的反馈掌控系统。
该掌控系统的操纵变量是阀门定位器去执行机构的输出信号。
电气阀门定位器作用1、用于对调整质量要求高的紧要调整系统,以提高调整阀的定位精准明确及牢靠性。
2、用于阀门两端压差大(△p》1MPa)的场合。
通过提高气源压力增大执行机构的输出力,以克服液体对阀芯产生的不平衡力,减小行程误差。
3、当被调介质为高温、高压、低温、有毒、易燃、易爆时,为了防止对外泄漏,往往将填料压得很紧,因此阀杆与填料间的摩擦力较大,此时用定位器可克服时滞。
4、被调介质为粘性流体或含有固体悬浮物时,用定位器可以克服介质对阀杆移动的阻力。
5、用于大口径(Dg》100mm)的调整阀,以增大执行机构的输出推力。
6、当调整器与执行器距离在60m以上时,用定位器可克服掌控信号的传递滞后,改善阀门的动作反应速度。
7、用来改善调整阀的流量特性。
8、一个调整器掌控两个执行器实行分程掌控时,可用两个定位器,分别接受低输入信号和高输入信号,则一个执行器低程动作,另一个高程动作,即构成了分程调整。
阀门定位器的详情介绍阀门定位器按结构分:气动阀门定位器、电气阀门定位器及智能阀门定位器,是调整阀的紧要附件,通常与气动调整阀配套使用,它接受调整器的输出信号,然后以它的输出信号去掌控气动调整阀,当调整阀动作后,阀杆的位移又通过机械装置反馈到阀门定位器,阀位情形通过电信号传给上位系统。
常见阀门定位器你必须掌握的工作原理!

常见阀门定位器你必须掌握的工作原理!阀门定位器是一种用于控制阀门的自动调节装置。
它能够通过与阀门连动,实现对阀门位置的自动调节,保证阀门处于设定的位置。
一、工作原理阀门定位器的工作原理主要包括以下几个方面:1.位置传感器:阀门定位器通过安装在阀门上的位置传感器来感知阀门的位置。
常见的位置传感器有行程开关、霍尔传感器等。
位置传感器可以感知阀门的位置,并将信号传输给控制系统。
2.控制系统:阀门定位器通过控制系统对阀门位置进行控制。
控制系统可以通过接收来自位置传感器的信号来判断阀门的位置,并通过比较设定的位置与实际位置的差异来控制阀门的运动。
3.驱动装置:阀门定位器通过驱动装置来实现对阀门的控制。
常见的驱动装置有电动装置、气动装置等。
驱动装置可以根据控制系统的指令,将电力或气力转化为机械运动,从而使阀门调节到指定的位置。
4.力矩装置:阀门定位器通过力矩装置来提供足够的力矩以克服阀门的摩擦力和液体流体的压力差等因素。
力矩装置可以根据控制系统的指令调整输出的力矩,以确保阀门的调节精度和稳定性。
5.控制算法:阀门定位器通过控制算法来实现对阀门位置的精确控制。
常见的控制算法有PID控制算法、模糊控制算法等。
控制算法可以根据阀门的实际位置和设定位置之间的差异来计算出控制信号,并将信号传输给驱动装置,以实现对阀门位置的调节。
二、常见阀门定位器的工作原理1.电动定位器:电动定位器是使用电动装置作为驱动装置的阀门定位器。
当控制系统接收到位置传感器的信号后,会将信号转化为电信号,并通过控制算法计算出控制信号。
然后,控制信号会传输给驱动装置,驱动装置会将电能转化为机械运动,从而实现对阀门位置的调节。
2.气动定位器:气动定位器是使用气压作为驱动装置的阀门定位器。
当控制系统接收到位置传感器的信号后,会将信号转化为气压信号,并通过控制算法计算出控制信号。
然后,控制信号会传输给驱动装置,驱动装置会根据控制信号控制气压的大小和流向,从而实现对阀门位置的调节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
气动阀门定位器工作原理气动阀门定位器是按力平衡原理设计工作的,其工作原理方框见上图所示,它是按力平衡原理设计和工作的。
如图上图所示当通入波纹管的信号压力增加时,使杠杆2绕支点转动,档板靠近喷嘴,喷嘴背压经放大器放大后,送入薄膜执行机构气室,使阀杆向下移动,并带动反馈杆(摆杆)绕支点转动,连接在同一轴上的反馈凸轮(偏心凸轮)也跟着作逆时针方向转动,通过滚轮使杠杆1绕支点转动,并将反馈弹簧拉伸、弹簧对杠杆2的拉力与信号压力作用在波纹管上的力达到力矩平衡时仪表达到平衡状态。
此时,一定的信号压力就与一定的阀门位置相对应。
以上作用方式为正作用,若要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。
所谓正作用定位器,就是信号压力增加,输出压力亦增加;所谓反作用定位器,就是信号压力增加,输出压力则减少。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作;相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
ZPD-2000系列电气阀门定位器ZPD-2000系列电气阀门定位器是根据国际先进的同类型产品,集多年成功的专业制造经验和先进的应用技术,经过消化吸收和针对(老产品)ZPD-2000 型系列电气阀门定位器加以综合改进的产品,并积极贯彻ISO9001质量保证体系,具有一定的先进性,符合国际标准要求的一种新型定位器。
一、产品的功能用途和适应范围:1、产品的功能用途: ZPD-2000系列电气阀门定位器是各种气动执行器的主要配套仪表。
它与气动调节阀配套使用,构成闭环控制回路。
用以提高调节阀的控制精度。
克服填料函与阀杆的磨擦力,克服介质压差对调节阀阀芯不平衡力。
提高阀门动作速度,可实现分程控制(段幅信号)。
可改变阀的作用方式,可控制非标操作压力的各类型气动执行机构。
2、 适应范围: ZPD-2000系列是自动化控制装备中的控制器,它广泛应用于石油。
化工、电站、冶金、轻工等工业部门。
二、产品型号规格及主要技术指标ZPD-2000系列定位器型号规格基本对照表 型号 防爆 型式 输入信号 mA.DC 气源压力 Mpa 输出压力Mpa(标准状态) 执行机构 输出行程和范围 耗气量 (标准状态) 类似型号Z P D -2111d 隔爆4-20 0.14 0.02-0.1 气动薄膜式 450L/h ZPD-1111 ZPD-1112 -2112 0.25 0.04-0.2 -2113 0.30;0.34 0.08-0.2ZPD-2000系列定位器型号规格基本对照表?Z ?P ?D -2121 e 增安 4-12 12-20 0.14 0.02-0.1 气动薄膜式 直行程 10-100mm 或 角行程 0-90°等 (直连式) 450L/h ZPD-1121 -2122 0.25 0.04-0.2 ZPD-1122例:1 ZPD-2111d:表示配气动薄膜式、输入信号 4-20 mA.DC、输入压力(信号):0.02-0.1Mpa, 防爆等级d: 隔爆型d Ⅱ BT6,兼容老防爆等级标准B3d、直行程、单作用电气阀门定位器。
例:2 ZPD-2211i: 表示配气动活塞(气缸)式、输入信号: 4-20 mA.DC、输出压力(信号):0-05Mpa、防爆等级i, 本质安全型:is Ⅱ CT6,兼容老防爆等级标准H Ⅲ e、双作用电气阀门定位器。
1. 主要技术指标(1)基本误差:±1%(单作用);±2%(双作用)(2)回差:1%(单作用);2%(双作用)(3)死区:0.4%(单作用);0.8%(双作用)(4)额定行程:0-(10-100)mm.「角行程(转行程)0-(50°、75°、90°)」(5)气源压力:0.14-0.55Mpa(6)输入信号:4-20mA.DC(标准型、常规产品)(4-12mA.DC、12-20 mA.DC)、0-10A.〔变型产品〕(0-5 mA.DC、5-10mA.DC)(7)输出压力:0.02-0.5Mpa(8)耗气量:单作用执行器450L/h(供气0.14Mpa);双作用执行器3600L/h(供气0.55Mpa)(9)输出特性:线性常规性;(等百分比,非线性特殊型)(10)环境温度:-35~+60℃(本质安全型为-20~+60℃)(11)相对湿度:5%-100%(12)防爆(防护)型式(等级):隔爆型d (dⅡ B T6);曾安型e(e Ⅱ T6);本质安全型I (ia Ⅱ CT6)(13)输入阻抗:4-20mA.DC/300±10∩(20℃时);0-10 mA.DC/1000±30∩(20℃时)(14)气源接口:M10×1,联接铜管为Φ6×1(标准型)(15)电源接口:M22×1.5,电源接头口M22×1.5壹只(16)外壳材料:铝合金喷涂工艺处理(17)外形尺寸:203×160×105(mm)(长×宽×高),安装尺寸为中心距50mm的两只M8螺孔。
(18)重量:2.8kg三、工作原理3.1 ZPD-2000系列电气阀门定位器是按力平衡原理设计工作的,其工作原理方框见(图一)图中:△1:输入电流△P背:喷咀挡板背压增加 M1:电磁力矩△P出:输出压力增加 M2:反馈力矩△h行:阀门行程增加△M:电磁力矩增加△Q反馈转角增加3.2 ZPD-200系列基本工作原理如图二所示当从电动调节器来的电流信号,输入到力矩马达组件的线圈(1)时,在例句马达的气隙中产生一个磁场,它与永久磁铁产生的磁场共同作用,使衔铁(2)产生一个向左的力,主杠杆(衔铁)(2)绕支点(15)转动,挡板(13)靠近喷嘴(14),喷嘴背压经放大器(16)放大后,送入薄膜执行机构气室(8),使阀杆向下移动,并带动反馈杆(9)绕支点(4)转动,连接在同一轴上的反馈凸轮(5)作逆时针方向转动,通过滚轮(10)使付杠杆(6)绕支点(7)转动,并将反馈弹簧(11)拉仲、弹簧(11)对主杠杆(2)的拉力与力矩马达作用在主杠杆上的力矩相等时,杠杆系统达到平衡状态。
此时,一定的信号电流就与一定的阀门位置相对应。
弹簧(12)是作调整零位用的。
以上作用式为正作用,弱要改变作用方式,只要将凸轮翻转,A向变成B向等,即可。
所谓正作用定位器,就是信号电流增加,输出压力亦增加;所谓反作用定位器,就是信号电流增加,输出压力侧减少。
一台正作用执行机构只要装上反作用定位器,就能实现反作用执行机构的动作:相反,一台反作用执行机构只要装上反作用定位器,就能实现正作用执行机构的动作。
四、机械结构ZPD-2000系列电气阀门定位器的整体结构,如(图例)所示。
主要由壳体、气路板、接线盒、力矩马达、气动放大器(单作用、双作用)、喷咀、挡板、反馈弹簧臂、量程调节、内部零部件、外调零部件及反馈部件等零部件组成。
五、防爆型及防爆措施1. 防爆型式(d)隔爆型:防爆(Ex)标志d d Ⅱ BT6 (老标志B3d)(e) 增安型:防爆(Ex)标志e e Ⅱ T6 (老标志Aoe)(i) 本安型:防爆(Ex)标志I ia Ⅱ CT6 (老标志H Ⅲ e)2. 防爆措施(a)防爆型电气阀门定位器符合GB3836.1-83《爆炸性环境用防爆用气设备通用要求》及GB3836.2-83《爆炸性环境用防爆电气设备隔爆型电气设备“d”》有关规定要求。
从设计、结构、制造上保证电气设备内部规定的爆炸性气体混合物爆炸时不能点燃设备周围同一爆炸性气体混合物。
(b)本安型电气阀门定位器,符合GB3836.1-83《爆炸性环境用防爆用气设备通用要求》及GB3836.4-83《爆炸性环境用防爆电气爆电气设备本质安全电路和电气设备“i”》有关规定要求.在设计结构电气线路上采取防爆措施,使用电路在正常工作和规定故障状态下产生的电火花和热效应均不能点燃规定的爆炸性混合物。
(c)隔爆型、增安型、本安型电气阀门定位器经国家级仪器仪表防爆安全监督检验颁发有关防爆合格证书。
(d)本质安全型电气阀门定位器防爆保护措施如(图三)所示:3.保护措施(a)本安型定位器必须与关联设备齐纳安全栅LB828、LB815、LB840、LB878、LJ9201、ISB5362-3006、ISB5362-4006、ISB5362-5006、EKZ231B-0-13(调节器发射极输出)配套使用,组成本质安全防爆系统。
b)定位器力矩马达中的线圈为高储能元件,线圈中并联的两只齐内二极管D1及D2为保护性元件。
如(图三)所示,在正常工作时,线圈通过4-20 mA.DC 电流时D1、D2处于截止状态,当处于故障状态下(突然断电、电路开路、短路或接地)储能线圈中的能量将通过D1及D2与线圈构成的回路释放能量,不能点燃设备周围爆炸性气体混合物。
故D1及D2称之为保护元件。
(c)本质安全电路中串联有D3 二极管,用于输入信号单向导通。
如若定位器信号加不到线圈中去,定位器不能工作,否则将失去保护元件应有的作用。
六、安装使用及调整1.安装阀门定位器与执行机构安装正确与否,直接影响阀门定位器的使用效果。
合理安装就是将固定在安装联板上的定位器与连接在执行机构上的定位器安装附件合理的连成一体。
特殊安装方式可与供应芳进行联系,进行技术服务指导。
(1)首先将定位器与安装联板固定在一起,方法是用两个M8×15螺钉将定位器装在安装联板上进行紧固连接。
(或与过渡联接按装板连接)。
(2)将定位器的反馈部件与执行机构连接。
将调节阀上阀杆螺帽松开,将反馈部件中支板插在指示器与连接螺母之间固紧(3)将装在定位的安装联板与执行机构支架两螺孔有M10×15螺钉按所需位置固定好。
(4)将反馈部件中的反馈联接板上的连接销插入定位器凸轮反馈杆开口槽中所对应的指示行程位置(10、16、25、40、60‘100mm).(5)不同型式的执行机构都应保证当阀位在50%时,凸轮反馈杆应处于水平位置。
(6)将安装连接的各部位调整好后,固定锁紧。
(7)电气阀门定位器,外壳可靠接地,断电源后开盖;定位器电源接口为M22×1.5,电缆布线接头,钢管布线接头(M22×1.5),接头要紧拧压紧接口。
(8)本安型电气阀门定位器,外壳可靠接地,断电源后开盖,引起电缆为屏蔽电缆要在安全场所与安全栅汇流条相连,关联设备装于安全场所,电缆允许分布电容≤0.08üF。
允许分布电感为2mH。
2. 调整(1)零位及行程调整先输入50%信号,用调零旋钮将输出位移调整到50%位置。
然后将输入信号由0%分别调到100%,观察行程与信号对应与否,可用量程旋钮调整行程在规定的位置上。