三轴加速度传感器在智能车路径识别中的应用
一文深度了解加速度传感器的应用场景

一文深度了解加速度传感器的应用场景加速度传感器有两种:一种是角加速度传感器,是由陀螺仪改进过来的。
另一种就是线加速度传感器。
它也可以按测量轴分为单轴、双轴和三轴加速度传感器。
现在,加速度传感器广泛应用于游戏控制、手柄振动和摇晃、汽车制动启动检测、地震检测、工程测振、地质勘探、振动测试与分析以及安全保卫振动侦察等多种领域。
下面就举例几种应用场景,更好的认识加速度传感器。
三轴加速度传感器的应用1、车身安全、控制及导航系统中的应用加速度传感器已被广泛应用于汽车电子领域,主要集中在车身操控、安全系统和导航,典型的应用如汽车安全气囊(Airbag)、ABS 防抱死刹车系统、电子稳定程序(ESP)、电控悬挂系统等。
目前车身安全越来越得到人们的重视,汽车中安全气囊的数量越来越多,相应对传感器的要求也越来越严格。
整个气囊控制系统包括车身外的冲击传感器(Satellite Sensor)、安置于车门、车顶,和前后座等位置的加速度传感器(G-Sensor)、电子控制器,以及安全气囊等。
电子控制器通常为16位或32位MCU,当车身受到撞击时,冲击传感器会在几微秒内将信号发送至该电子控制器。
随后电子控制器会立即根据碰撞的强度、乘客数量及座椅/安全带的位置等参数,配合分布在整个车厢的传感器传回的数据进行计算和做出相应评估,并在最短的时间内通过电爆驱动器(Squib Driver)启动安全气囊保证乘客的生命安全。
通常仅靠ABS和牵引控制系统无法满足车辆在弯曲路段上的行车安全要求。
该场合下电子稳定性控制系统(ESC) 就能够通过修正驾驶员操作中的转向不足或过度转向,来控制车辆使其不偏离道路。
该系统通过使用一个陀螺仪来测量车辆的偏航角,同时用一个低重力加速度传感器来测量横向加速度。
将所得测量数据与通过行驶速度和车轮倾斜角两项数据计算得到的结果进行比对,从而调整车辆转向以防止发生侧滑。
除了车身安全系统这类重要应用以外,目前加速度传感器在导航系统中的也在扮演重要角色。
三轴加速度 卡尔曼滤波 姿态
三轴加速度卡尔曼滤波姿态标题:深度解析三轴加速度、卡尔曼滤波与姿态一、引言在现代科技和工程领域中,三轴加速度、卡尔曼滤波和姿态是广泛应用于传感器技术和导航系统中的重要概念和工具。
它们在智能手机、飞行器、机器人、虚拟现实和运动追踪等领域发挥着重要作用。
本文将从深度和广度两个方面对这三个主题进行全面评估和解析,以帮助读者更全面、深入地理解它们的概念和应用。
二、三轴加速度的原理和应用1. 三轴加速度的概念和定义三轴加速度是指在三个坐标轴上的加速度值,通常由X轴、Y轴和Z 轴表示,分别对应水平方向、垂直方向和前后方向。
它是通过加速度传感器测量得到的,可以用来计算物体的运动状态和姿态。
2. 三轴加速度的应用领域三轴加速度的应用非常广泛,包括但不限于智能手机的屏幕旋转、运动传感器、运动追踪设备、手势识别、虚拟现实和增强现实设备等。
它为这些设备提供了精准的姿态信息,使它们能够更加智能和灵活地响应用户操作。
三、卡尔曼滤波的原理和算法1. 卡尔曼滤波的概念和作用卡尔曼滤波是一种用于估计系统状态的算法,可以通过对已知的信息和测量值进行处理,来预测和优化系统的状态。
在三轴加速度中,卡尔曼滤波可以用来消除误差、提高测量精度和稳定性。
2. 卡尔曼滤波在姿态估计中的应用在姿态估计领域,卡尔曼滤波可以结合陀螺仪、加速度计和磁力计等传感器数据,实现对物体姿态的精准测量和预测,提高姿态估计的准确性和稳定性。
四、姿态的概念和意义1. 姿态的定义和分类姿态是指物体在空间中的方向和位置关系,通常包括欧拉角、四元数等表示方法。
在实际应用中,姿态可以分为静止姿态和动态姿态,对应于物体的静止和运动状态。
2. 姿态在导航和控制中的应用姿态在航空、航天、机器人控制、自动驾驶等领域中具有重要的应用价值,可以帮助系统实现精准的导航定位和自主控制。
五、结论与展望本文从深度和广度两个方面对三轴加速度、卡尔曼滤波和姿态进行了全面评估和解析,希望能够帮助读者更全面、深入地理解它们的概念和应用。
传感器在智能电动汽车中的应用研究
传感器在智能电动汽车中的应用研究在当今科技飞速发展的时代,智能电动汽车正逐渐成为人们出行的重要选择。
而传感器作为智能电动汽车的“眼睛”和“耳朵”,在车辆的性能优化、安全保障以及智能化驾驶等方面发挥着至关重要的作用。
首先,让我们来了解一下什么是传感器。
传感器是一种能够感知物理世界中的各种信息,并将其转换为电信号或其他可测量形式的装置。
在智能电动汽车中,常见的传感器类型包括但不限于:位置传感器、速度传感器、加速度传感器、压力传感器、温度传感器、图像传感器等等。
位置传感器对于智能电动汽车的定位和导航至关重要。
通过全球定位系统(GPS)和惯性测量单元(IMU)等位置传感器,车辆能够准确地获取自身的地理位置和行驶方向,为自动驾驶和路径规划提供基础数据。
速度传感器和加速度传感器则时刻监测车辆的运动状态。
这些传感器的数据有助于车辆控制系统实时调整动力输出和制动力度,以实现平稳的加速、减速和转向,提高驾驶的舒适性和安全性。
压力传感器在轮胎压力监测系统中发挥着关键作用。
实时监测轮胎的气压,一旦发现异常能够及时提醒驾驶员,避免因轮胎气压不足或过高而导致的安全隐患和轮胎磨损。
温度传感器广泛应用于电池管理系统和动力系统中。
电池在工作过程中会产生大量的热量,如果温度过高可能会影响电池的性能和寿命,甚至引发安全问题。
温度传感器能够及时监测电池和动力系统的温度,通过冷却系统进行有效的温度控制。
图像传感器,如摄像头,是实现智能驾驶辅助系统和自动驾驶功能的重要组成部分。
它们可以识别道路标志、交通信号灯、行人、其他车辆等,为车辆的决策和控制提供丰富的视觉信息。
在智能电动汽车的安全保障方面,传感器更是功不可没。
碰撞传感器能够在车辆发生碰撞时迅速感知并触发安全气囊的弹出,保护驾乘人员的生命安全。
距离传感器和雷达可以实时监测车辆与周围物体的距离和相对速度,当存在碰撞风险时及时发出警报并采取自动制动等措施,避免事故的发生。
此外,传感器还在智能电动汽车的能源管理方面发挥着重要作用。
传感器技术在智能电动汽车中的应用研究
传感器技术在智能电动汽车中的应用研究在当今科技飞速发展的时代,智能电动汽车逐渐成为了汽车行业的主流趋势。
传感器技术作为智能电动汽车的关键组成部分,发挥着至关重要的作用。
它就像是智能电动汽车的“眼睛”和“耳朵”,能够实时感知车辆周围的环境和自身的状态,为车辆的安全、高效运行提供了有力的保障。
智能电动汽车中的传感器种类繁多,包括但不限于激光雷达、毫米波雷达、摄像头、超声波传感器、惯性测量单元(IMU)、GPS 传感器等。
这些传感器各自具有独特的工作原理和优势,相互配合,为车辆提供了全面、准确的信息。
激光雷达是一种通过发射激光束并测量反射光来获取物体距离和形状信息的传感器。
它具有高精度、高分辨率和长探测距离的特点,能够在复杂的环境中准确地识别障碍物和道路标识。
在智能电动汽车中,激光雷达通常被安装在车顶或车头部位,用于自动驾驶系统的环境感知。
然而,激光雷达的成本较高,这在一定程度上限制了其在量产车型中的广泛应用。
毫米波雷达则是利用毫米波频段的电磁波进行探测的传感器。
它能够在恶劣天气条件下(如雨雪、雾等)正常工作,具有较好的穿透能力。
毫米波雷达主要用于测量车辆与前方障碍物的距离和相对速度,为自适应巡航控制和自动紧急制动等功能提供支持。
与激光雷达相比,毫米波雷达的成本相对较低,但精度和分辨率略逊一筹。
摄像头是智能电动汽车中最常见的传感器之一。
它可以获取丰富的图像信息,包括道路标线、交通信号灯、行人、车辆等。
通过图像处理算法,摄像头能够识别各种交通标识和物体。
不过,摄像头在光线不足或恶劣天气条件下的性能会受到一定影响,而且其对距离的测量精度不如激光雷达和毫米波雷达。
超声波传感器主要用于短距离探测,如车辆的泊车辅助系统。
它通过发射超声波并接收反射波来测量障碍物的距离,具有成本低、安装方便的优点。
但超声波传感器的探测范围较小,通常在数米以内。
惯性测量单元(IMU)用于测量车辆的加速度、角速度和姿态等信息。
它可以帮助车辆在没有 GPS 信号的情况下保持定位和导航的准确性,同时也为车辆的稳定性控制提供了重要的数据支持。
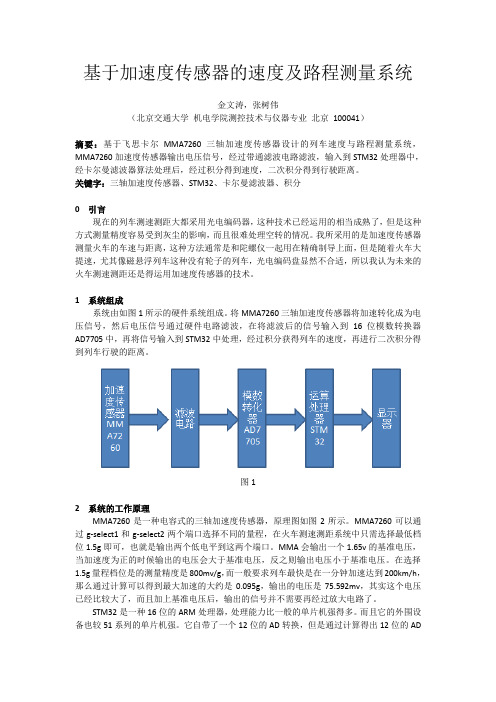
基于加速度传感器的速度及路程测量系统
Sk
h ( f ( xk ) 4 f ( x 1 ) f ( xk 1 )) k 6 2
Simpson 公式中每一个小微段用到三个点积分,所以我们积分时对每三个点进行积分从 而得到如下的公式
其中
h
是采样周期的二倍,
n
a 为采集到的加速度,n 为信息处理的周期。
n/ 2 n/ 2 h Vt Vk (a0 4 a2 k 2 a2 k 1 an ) 6 k 0 k 1 k 1
图1 2 系统的工作原理 MMA7260 是一种电容式的三轴加速度传感器,原理图如图 2 所示。MMA7260 可以通 过 g-select1 和 g-select2 两个端口选择不同的量程,在火车测速测距系统中只需选择最低档 位 1.5g 即可,也就是输出两个低电平到这两个端口。MMA 会输出一个 1.65v 的基准电压, 当加速度为正的时候输出的电压会大于基准电压,反之则输出电压小于基准电压。在选择 1.5g 量程档位是的测量精度是 800mv/g, 而一般要求列车最快是在一分钟加速达到 200km/h, 那么通过计算可以得到最大加速的大约是 0.095g,输出的电压是 75.592mv,其实这个电压 已经比较大了,而且加上基准电压后,输出的信号并不需要再经过放大电路了。 STM32 是一种 16 位的 ARM 处理器, 处理能力比一般的单片机强得多。 而且它的外围设 备也较 51 系列的单片机强。它自带了一个 12 位的 AD 转换,但是通过计算得出 12 位的 AD
图2
图3 系统软件流程图 软件系统采取的是卡尔曼滤波器对数据进行软件滤波,然后再利用辛普森公式进行积 分,软件流程图如图 4 所示。卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理 算法(optimal recursive data processing algorithm) 。对于解决很大部分的问题,他是最优, 效率最高甚至是最有用的。他的广泛应用已经超过 30 年,包括机器人导航,控制,传感器 数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处 理,例如头脸识别,图像分割,图像边缘检测等等。 现设线性时变系统的离散状态防城和观测方程为: X(k) = F(k,k-1)· X(k-1)+T(k,k-1)· U(k-1) Y(k) = H(k)· X(k)+N(k) 3 其中 X(k)和 Y(k)分别是 k 时刻的状态矢量和观测矢量 F(k,k-1)为状态转移矩阵 U(k)为 k 时刻动态噪声 T(k,k-1)为系统控制矩阵 H(k)为 k 时刻观测矩阵 N(k)为 k 时刻观测噪声 则卡尔曼滤波的算法流程为: 预估计 X(k)^= F(k,k-1)· X(k-1) 计算预估计协方差矩阵 C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)' Q(k) = U(k)×U(k)' 计算卡尔曼增益矩阵 K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1) R(k) = N(k)×N(k)' 更新估计 X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^] 计算更新后估计协防差矩阵 C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)' X(k+1) = X(k)~ C(k+1) = C(k)~ 重复以上步骤 在对加速度信号进行处理之后我们得到了一组可以积分的加速度信号。 为了获得比较 高的积分精度,我们采用了 Simpson 公式进积分 在每个小区间 xk , xk 1 使用 Simpson 公式
加速度传感器用途

加速度传感器用途加速度传感器(Accelerometer)是一种用于测量物体在三个轴上的加速度的传感器。
它广泛应用于各个领域,包括消费电子产品、汽车工业、航空航天领域、医疗设备等等。
下面将详细介绍加速度传感器的用途和工作原理。
首先,加速度传感器在消费电子产品中有着广泛的应用。
例如,智能手机中的自动旋转屏幕功能就是通过加速度传感器来实现的。
传感器可以检测到手机在水平方向的倾斜角度,从而将屏幕的显示方向调整为相应的横向或纵向。
此外,智能手表、智能手环等可穿戴设备也常常使用加速度传感器来监测人体的运动状态和睡眠质量。
其次,汽车工业是加速度传感器的另一个重要领域。
在汽车中,加速度传感器可以用来监测车辆的加速度、制动力和侧倾等信息。
这些数据对于车辆的悬挂系统、稳定性控制系统和碰撞安全系统等的设计和调整非常重要。
另外,加速度传感器还可以用于车辆的倾斜角度检测和自动驾驶系统中的姿态控制。
航空航天领域也广泛使用加速度传感器。
在飞行器中,加速度传感器可以测量飞行器的加速度和倾斜角度,对飞行的稳定性和导航控制至关重要。
此外,它还可以用于航天器的姿态控制、碰撞检测和姿态变化的记录。
医疗设备领域也是加速度传感器的重要应用领域。
例如,健身追踪器可以使用加速度传感器来监测人体的运动和步数,计算消耗的卡路里和距离。
此外,加速度传感器还可以用于医疗器械中,例如心脏起搏器或可穿戴式医疗设备,用于监测患者的身体活动和健康状况。
加速度传感器的工作原理是基于质量的惯性。
它通常由一个质量和一个弹簧组成,质量与弹簧相连,当传感器受到外部力的作用时,质量会发生位移,从而改变弹簧的形变。
通过检测弹簧的形变程度,可以精确测量物体受到的加速度。
总结起来,加速度传感器是一种用于测量物体在三个轴上的加速度的传感器。
它在消费电子产品、汽车工业、航空航天领域和医疗设备中有着广泛的应用。
无论是自动旋转屏幕、车辆稳定性控制、飞行器导航还是医疗监测,加速度传感器都发挥着重要的作用。
三轴加速度传感器

三轴加速度传感器1. 引言三轴加速度传感器是一种常见的传感器技术,用于测量物体的加速度和倾斜度。
它在许多领域中得到广泛应用,包括运动检测、姿态测量、智能手机和游戏控制器等设备。
本文将介绍三轴加速度传感器的工作原理、应用领域和未来发展趋势。
2. 工作原理三轴加速度传感器基于微机电系统(MEMS)技术。
它通常由微机械结构、压电材料和电路组成。
当物体受到加速度时,微机械结构会产生微小的位移,并将其转化为电压信号。
这个信号经过放大和滤波后被传感器读取和解析。
三轴加速度传感器通常包含X、Y、Z三个轴向,分别对应物体运动的水平、垂直和纵深方向。
通过测量三轴的加速度值,传感器可以确定物体的运动状态。
3. 应用领域3.1 运动检测三轴加速度传感器广泛应用于运动检测领域。
它可以测量用户的步数、距离、速度和活动强度,用于运动追踪和健身监测。
许多智能手环、智能手表和健身器材上都配备了三轴加速度传感器。
3.2 姿态测量三轴加速度传感器可以测量物体的倾斜度和方向,用于姿态测量和姿势跟踪。
它在虚拟现实、增强现实和航空航天等领域中得到广泛应用。
例如,游戏控制器可以通过传感器测量玩家的倾斜动作,并将其映射到游戏中的角色操作。
3.3 智能手机和平板电脑三轴加速度传感器是智能手机和平板电脑中的重要组成部分。
它可以实现自动屏幕旋转、姿势识别和步态分析等功能。
此外,多个传感器的组合使用,如加速度传感器和陀螺仪的联合使用,可以提供更精确的运动感知和定位能力。
4. 未来发展随着人工智能、物联网和移动技术的快速发展,三轴加速度传感器将在未来得到更广泛的应用。
以下是一些未来发展趋势:4.1 小尺寸化和低功耗随着智能设备更加轻薄和便携,对三轴加速度传感器的尺寸和功耗要求也越来越高。
未来的传感器将更加小巧,能够集成到更多类型的设备中,并且能够在较长时间内维持稳定的工作。
4.2 高精度和多参数测量未来的三轴加速度传感器将具备更高的精度和多参数测量能力。
三轴加速度传感器原理
三轴加速度传感器原理三轴加速度传感器是一种能够测量物体在三个方向上加速度的传感器。
它通常由微机电系统(MEMS)加速度传感器和信号处理电路组成,可以广泛应用于智能手机、平板电脑、运动追踪器、汽车安全系统等领域。
本文将介绍三轴加速度传感器的原理和工作方式。
三轴加速度传感器是基于牛顿第二定律的原理工作的。
根据牛顿第二定律,物体的加速度与作用在物体上的力成正比,与物体的质量成反比。
因此,通过测量物体所受的力,可以计算出物体的加速度。
三轴加速度传感器利用微机电系统的微小结构,在受到外部加速度作用时,微结构会产生微小的位移或应变,通过这种微小的变化,可以测量出物体在三个方向上的加速度。
三轴加速度传感器通常采用微机电系统(MEMS)技术制造。
MEMS技术是一种将微型机械结构、微型传感器、微型执行器和微型电子器件集成在一起的技术,可以实现微小尺寸、低功耗、高灵敏度的传感器。
在三轴加速度传感器中,微机电系统的微型结构会随着外部加速度的变化而发生微小的位移或应变,这种微小的变化会被传感器捕获并转换成电信号,再经过信号处理电路进行处理和放大,最终输出测量结果。
三轴加速度传感器可以测量物体在X、Y、Z三个方向上的加速度。
在静止状态下,传感器会受到重力的作用,产生一个固定的重力加速度。
当物体发生加速度运动时,重力加速度会与物体的运动加速度叠加,通过对叠加后的加速度进行分解和处理,就可以得到物体在三个方向上的加速度。
三轴加速度传感器在实际应用中具有广泛的用途。
在智能手机和平板电脑中,三轴加速度传感器可以用于屏幕旋转、姿态识别、摇晃操作等功能;在运动追踪器中,可以用于计步、睡眠监测、运动轨迹记录等功能;在汽车安全系统中,可以用于碰撞检测、车辆稳定控制等功能。
通过测量物体在三个方向上的加速度,三轴加速度传感器可以实现对物体运动状态的精确监测和控制。
总之,三轴加速度传感器是一种能够测量物体在三个方向上加速度的传感器,它利用微机电系统的微小结构和信号处理电路,可以实现对物体运动状态的精确监测和控制。
三轴加速度传感器使用说明
三轴加速度传感器使用说明
三轴加速度传感器是一种常用的传感器,可以检测物体在三个方向的加速度变化,广
泛应用于航空、航天、汽车、医疗等领域。
下面是三轴加速度传感器的使用说明。
1.传感器安装
三轴加速度传感器应安装在所测物体上,通常采用固定装置固定在物体表面上。
传感
器应尽量避免受到较大的冲击和振动,以免造成误差。
安装前应先检查传感器是否完好、
灵敏度是否正确,定期检查和校准传感器。
2.传感器读数范围和分辨率
传感器的读数范围指传感器可以测量的最大和最小加速度,超出读数范围将会导致读
数异常。
分辨率指传感器可以测量的最小加速度变化,决定了传感器精度的高低。
要根据
需要选择合适的传感器,以确保读数范围和分辨率满足测量要求。
3.传感器输出信号类型
三轴加速度传感器通常有模拟输出和数字输出两种类型。
模拟输出信号为电压或电流,直接与模数转换器相连,可输出适于特定应用的模拟信号。
数字输出信号为数字信号,通
过串行或并行接口输出,可直接与微处理器和计算机连接。
4.传感器工作原理
三轴加速度传感器工作原理基于牛顿第二定律,即对物体施加的力等于其质量乘以加
速度。
传感器内部有微机械加速度计,通过检测加速度计受到的加速度来测量被测物体的
加速度。
该加速度计一般由质量块、弹簧、压电陶瓷等组成。
5.传感器应用场景。
三轴磁场传感器的用途
三轴磁场传感器的用途三轴磁场传感器是一种用于测量和检测磁场强度的设备,广泛应用于各个领域。
它可以在三个不同的轴上分别测量磁场的强度,从而提供全方位的磁场信息。
以下将介绍三轴磁场传感器的几个常见用途。
1. 导航和定位系统三轴磁场传感器在导航和定位系统中扮演着重要的角色。
通过测量地球的磁场,三轴磁场传感器可以帮助设备确定其在空间中的方向和位置。
这对于航空航天、船舶导航、汽车导航等应用非常关键。
例如,智能手机中的电子罗盘就是利用三轴磁场传感器来实现定位和导航功能的。
2. 姿态控制和运动检测三轴磁场传感器还可以用于姿态控制和运动检测。
通过测量磁场的方向和强度变化,传感器可以检测设备的倾斜、旋转和加速度等信息。
这对于无人机、机器人、游戏控制器等设备的运动控制和动作捕捉非常重要。
例如,在虚拟现实游戏中,通过安装在游戏手柄上的三轴磁场传感器可以实时捕捉玩家的手部动作,从而实现与游戏角色的互动。
3. 环境监测和安全应用三轴磁场传感器还可以用于环境监测和安全应用。
通过测量磁场的变化,传感器可以检测到外部物体的靠近和移动。
这在安全门、防盗系统、智能家居等领域得到了广泛应用。
例如,在安防系统中,三轴磁场传感器可以用来探测门窗的开关状态,一旦有异常情况发生,系统就会发出警报。
4. 医疗设备三轴磁场传感器在医疗设备中也有着重要的作用。
例如,在磁共振成像(MRI)中,三轴磁场传感器可以用来测量磁场的强度和方向,从而帮助医生获取患者身体内部的详细结构信息。
此外,三轴磁场传感器还可以用于心脏起搏器、脑电图仪等医疗设备中,监测和记录人体的生理信号。
总结起来,三轴磁场传感器具有广泛的应用领域,包括导航和定位系统、姿态控制和运动检测、环境监测和安全应用、医疗设备等。
随着技术的不断进步和创新,三轴磁场传感器的应用领域还将不断扩展,为各行各业带来更多便利和可能性。
传感器技术在智能电动汽车中的创新应用

传感器技术在智能电动汽车中的创新应用在当今科技飞速发展的时代,智能电动汽车已经成为汽车行业的重要发展方向。
而传感器技术作为智能电动汽车的关键组成部分,其创新应用正在不断推动着汽车的智能化、安全性和性能的提升。
智能电动汽车中的传感器就如同车辆的“眼睛”和“耳朵”,它们能够实时感知车辆周围的环境、车辆自身的状态以及驾驶者的行为,为车辆的智能控制和决策提供关键的信息支持。
首先,环境感知传感器在智能电动汽车中发挥着至关重要的作用。
其中,激光雷达是一种高精度的环境感知传感器。
它通过发射激光束并测量反射回来的时间和强度,能够生成车辆周围环境的三维点云图像,从而精确地识别障碍物、道路标识和其他车辆的位置和形状。
相比传统的雷达传感器,激光雷达具有更高的分辨率和更准确的测量能力,能够在复杂的交通环境中为车辆提供更可靠的环境感知信息。
毫米波雷达也是常见的环境感知传感器之一。
它能够在恶劣天气条件下,如雨雪、雾霾等,保持较好的工作性能。
毫米波雷达可以检测到车辆前方的障碍物,并测量其距离、速度和角度等信息,为车辆的自适应巡航控制、自动紧急制动等功能提供支持。
视觉传感器,通常是摄像头,在智能电动汽车中也得到了广泛应用。
通过图像处理技术,摄像头可以识别交通信号灯、道路标线、行人、自行车等目标,并为车辆的自动驾驶系统提供丰富的视觉信息。
此外,多摄像头系统还可以实现车辆的全景环视功能,帮助驾驶者更好地了解车辆周围的情况,提高驾驶的安全性和便利性。
除了环境感知传感器,车辆自身状态传感器对于智能电动汽车的性能和安全性也至关重要。
例如,加速度传感器、陀螺仪和车轮转速传感器等可以实时监测车辆的加速度、角速度和车轮转速等参数,为车辆的稳定性控制、防抱死制动系统和牵引力控制系统提供关键数据。
电池管理系统中的传感器则负责监测电池的电压、电流、温度和内阻等参数,以确保电池的安全运行和优化电池的使用寿命。
这些传感器能够及时发现电池的异常情况,如过充、过放、过热等,并采取相应的保护措施,提高电池的可靠性和安全性。
车辆行为识别技术中的加速度传感器使用技巧

车辆行为识别技术中的加速度传感器使用技巧车辆行为识别技术是一项关键的技术,被广泛应用于智能交通系统、自动驾驶领域以及车辆安全性能分析等方面。
在这个技术中,加速度传感器扮演着重要的角色,用于感知和记录车辆的加速度、减速度和转弯等行为。
本文将介绍车辆行为识别技术中加速度传感器的使用技巧,包括传感器选型、安装位置、数据采集和处理等方面。
首先,选择合适的加速度传感器至关重要。
在车辆行为识别技术中,常用的传感器类型包括压电式传感器和微机电系统(MEMS)传感器。
压电式传感器需要外部电源供电,具有较高的灵敏度和精度,但成本较高。
而MEMS传感器则小巧、便宜,并能通过内嵌电池完成工作。
选择传感器应根据具体需求来定,包括预算、精度要求和安装空间等。
其次,安装位置对于传感器的性能和准确度有着重要的影响。
传感器应该尽可能靠近车辆重心位置,以减小位置误差对测量结果的影响。
同时,应尽量避免传感器与其他零件或装置的物理接触,以防止机械振动和冲击对传感器的干扰。
另外,在安装过程中,要确保传感器的固定牢固可靠,以防止其在行驶过程中的松动。
第三,合理的数据采集方法对于车辆行为识别技术的有效性至关重要。
传感器应以足够的采样频率进行数据采集,以捕捉车辆行为的细节和变化。
过低的采样频率会导致数据信息的缺失,影响识别算法的准确性。
而过高的采样频率则会增加计算和存储成本,不经济实用。
根据具体需求,可进行试验和优化,确定最佳的采样频率。
最后,对采集到的数据进行处理和分析是车辆行为识别技术的核心环节。
传感器所采集的原始数据需要进行滤波、校准和降噪处理,以获得准确和可靠的数据。
处理方法包括基于车辆动力学模型的数据重构、特征提取和分类等。
此外,还可以借助机器学习和人工智能算法,对大量数据进行训练和建模,提高识别算法的准确性和稳定性。
综上所述,加速度传感器在车辆行为识别技术中发挥着重要作用,其使用技巧包括合适的选型、合理的安装位置、恰当的数据采集和处理方法。
三轴加速度传感器在智能车控制与道路识别中的应用

三轴加速度传感器在智能车控制与道路识别中的应用
三轴加速度传感器MMA7260Q可以测量智能车惯性大小,选取最佳重心位置,并能准确定位智能车处于直线、弯道、坡道、漂移等运行状态;利用加速度传感器能够提前预测路径,并判断何时刹车效果最佳。
并且很好的解决了在直立行走车模的平衡与方向识别。
由此提出了一种基于三轴加速度传感器在智能车中的控制以及路径识别的设计。
该设计采用三轴加速度传感器MMA7260Q测量智能车在运动中的加速度信号,以嵌入式单片MC9S12XSl28B作为核心控制器,对加速度信号进行采样,A/D转换,再将特征数据存储在EEPROM中。
很好地解决了智能车运动路径分析的问题以及在。
实时获取小车加速度,从而更加全面的获取小车的运行状态,为控制的流畅性和更好的路况识别提供了可能。
在直立行走的车模中,应用同样的原理,选择最佳重心,可以很好地解决直立行走车模的平衡以及方向识别,从而加快车模的行车速度。
实验结果证明:结合加速度传感器具有很强的抗干扰性,提取角度信息更准确,确保了智能车在直道上能够以较高的速度行驶,在弯道则能基本不失速平滑地过弯。
传感器在智能交通中的应用

传感器在智能交通中的应用在智能交通中,传感器的应用具有重要的意义。
传感器的作用是通过感知和检测环境中的各种物理量,并将其转化为可供计算机处理的信号。
它们能够实时监测交通流量、识别车辆、控制信号灯以及提供定位等功能。
本文将就传感器在智能交通中的应用进行论述。
一、交通流量检测与监测传感器在智能交通中最常见的应用之一是交通流量检测与监测。
传感器能够通过测量车辆的数量和速度来确定道路上的交通状况,并实时将这些数据传输至交通管理中心,以帮助交通管理人员做出相应的调整。
传感器可以应用于交通磁感应器、车载传感器等,通过这些传感器的使用,可以准确地获取交通流量信息,为实时交通管理提供数据支持。
二、车辆识别与追踪传感器还可以用于车辆识别与追踪。
通过在道路上安装传感器,可以实时获取车辆的相关信息,如车型、车牌号码等。
这些信息有助于交通管理人员进行车辆追踪,以进行交通事故的调查和处理。
通过车辆识别与追踪系统,可以大大提高道路交通管理的效率和准确性,有助于改善交通安全。
三、信号灯的控制传感器的应用还可以用于信号灯的控制。
通过在信号灯上安装传感器,可以实时感知道路上的交通情况,及时对信号灯进行控制,以优化交通流量,减少拥堵。
当道路上的车辆较少时,传感器可以自动调整信号灯的时间,提供更流畅的交通流量。
而在交通高峰期间,传感器则会通过识别车辆数量的增加而相应地延长红灯时间,以确保安全通行。
四、交通事故预警与处理传感器在智能交通中还可以应用于交通事故的预警与处理。
通过在道路上安装传感器,可以实时感知交通事故的发生,并及时将相关信息传输至交通管理中心,以便交通管理人员及时处理。
传感器可以检测到突发的急刹车或碰撞等情况,通过与交通管理中心的连接,及时发送警报,以减少交通事故对交通流量的影响,并提供救援信息。
五、定位与导航最后,传感器在智能交通中还可以用于定位与导航。
通过利用全球定位系统(GPS)和其他传感器,如加速度计和陀螺仪等,可以实现车辆的准确定位和导航功能。
在工业和汽车领域中SCA3300高性能三轴MEMS加速度传感器有什么应用?
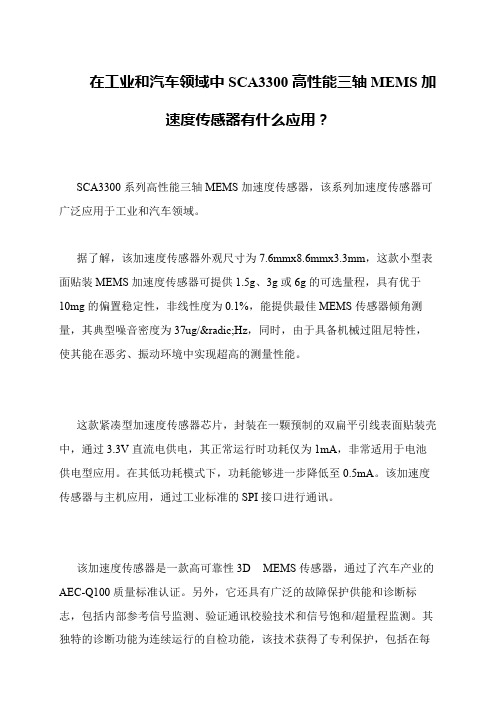
在工业和汽车领域中SCA3300高性能三轴MEMS加速度传感器有什么应用? SCA3300系列高性能三轴MEMS加速度传感器,该系列加速度传感器可广泛应用于工业和汽车领域。
据了解,该加速度传感器外观尺寸为7.6mmx8.6mmx3.3mm,这款小型表面贴装MEMS加速度传感器可提供1.5g、3g或6g的可选量程,具有优于10mg的偏置稳定性,非线性度为0.1%,能提供最佳MEMS传感器倾角测量,其典型噪音密度为37ug/√Hz,同时,由于具备机械过阻尼特性,使其能在恶劣、振动环境中实现超高的测量性能。
这款紧凑型加速度传感器芯片,封装在一颗预制的双扁平引线表面贴装壳中,通过3.3V直流电供电,其正常运行时功耗仅为1mA,非常适用于电池供电型应用。
在其低功耗模式下,功耗能够进一步降低至0.5mA。
该加速度传感器与主机应用,通过工业标准的SPI接口进行通讯。
该加速度传感器是一款高可靠性3D MEMS传感器,通过了汽车产业的AEC-Q100质量标准认证。
另外,它还具有广泛的故障保护供能和诊断标志,包括内部参考信号监测、验证通讯校验技术和信号饱和/超量程监测。
其独特的诊断功能为连续运行的自检功能,该技术获得了专利保护,包括在每个测量循环中,从MEMS传感器运动到信号调理电路的连续自检验证,确保了整个信号链的正常运行。
其运行温度范围为-40℃到+125℃。
该系列加速度传感器的潜在应用,主要包括:调平和对准系统、重型机械的惯性测量单元、导航系统、自动引导车以及施工测量设备等。
未来,在高精度汽车惯性传感领域,也具有广泛的应用,如先进驾驶辅助系统(ADAS)和智能运输控制等,也能利用该加速度传感器实现。
此外,利用倾角传感的重量测量,也是一种应用案例。
三轴加速度传感器原理
三轴加速度传感器原理三轴加速度传感器是一种能够测量物体在三个轴向上加速度的传感器,它可以通过测量物体在三个方向上的加速度来确定物体的运动状态。
三轴加速度传感器的原理是基于牛顿第二定律,即物体的加速度与作用在物体上的合力成正比,与物体的质量成反比。
在本文中,我们将详细介绍三轴加速度传感器的原理及其应用。
三轴加速度传感器是由微机电系统(MEMS)技术制成的,它包括一个微型质量块和一组微型弹簧。
当物体发生加速度时,微型质量块会受到作用力而发生位移,微型弹簧则会产生相应的变形。
通过测量微型质量块和微型弹簧的位移或变形,就可以确定物体在三个轴向上的加速度。
三轴加速度传感器的工作原理是基于质量块和弹簧的振动频率的变化。
当物体受到加速度作用时,质量块和弹簧的振动频率会发生变化,通过测量这种变化就可以确定物体的加速度。
三轴加速度传感器可以测量物体在x、y、z三个轴向上的加速度,从而确定物体的运动状态。
三轴加速度传感器广泛应用于各种领域,如汽车电子、智能手机、运动追踪器等。
在汽车电子领域,三轴加速度传感器可以用于测量车辆的加速度、制动和转向状态,从而实现车辆稳定控制和防抱死系统。
在智能手机领域,三轴加速度传感器可以用于实现屏幕旋转、晃动检测和步数统计等功能。
在运动追踪器领域,三轴加速度传感器可以用于监测运动员的运动状态,从而实现运动数据的采集和分析。
总之,三轴加速度传感器是一种能够测量物体在三个轴向上加速度的传感器,它的工作原理是基于质量块和弹簧的振动频率的变化。
三轴加速度传感器广泛应用于汽车电子、智能手机、运动追踪器等领域,可以实现车辆稳定控制、智能手机功能和运动数据采集等功能。
通过对三轴加速度传感器的原理及应用的深入了解,可以更好地理解其在现代科技领域中的重要作用。
三轴加速度传感器原理
三轴加速度传感器原理
三轴加速度传感器的工作原理基于微电机的电容变化。
传感器内部包
含一个微小的电容结构,其中的电荷会随着物体的运动而改变。
当物体处
于静止状态时,电荷保持不变。
当物体发生加速度变化时,电容结构的电
荷分布发生变化,从而改变了传感器中的电荷。
传感器中的电容变化通过电路放大,并转化为电压信号。
这个电压信
号与物体的加速度成正比。
传感器通过内置的模数转换器将电压信号转化
为数字信号,然后通过数字信号处理器进行处理,最后将数据发送给控制
系统进行分析。
在汽车导航系统中,三轴加速度传感器可以测量车辆的加速度和转向
角度,并通过算法计算出车辆的位置和行驶方向。
在智能手机中,三轴加
速度传感器可以检测设备的倾斜和摇晃,并在手机游戏中实现姿势检测和
运动控制。
在游戏控制器中,三轴加速度传感器可以感知玩家的动作,实
现更加真实的游戏体验。
三轴加速度传感器的使用使得许多现代设备更加智能化和交互性更强。
它能够提供准确和可靠的加速度测量,从而实现更加精确的运动控制和位
置识别。
此外,三轴加速度传感器还可以与其他传感器,如陀螺仪传感器
和磁力传感器等配合使用,进一步提高应用的准确性和性能。
总结起来,三轴加速度传感器通过测量物体在三个轴上的加速度来提
供准确和可靠的加速度测量。
它的工作原理基于微电机的电容变化,具有
高精度、高灵敏度和低功耗的特点。
这种传感器在汽车导航系统、智能手
机和游戏控制器等设备中得到广泛应用,使得这些设备更加智能化和交互
性更强。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阂哮圆一园一圈
图1加速度信号采集结构图
Fig 1 Structure
diagram of
acceleration signal
acquisifion
1.2加速度传感器与单片机的接口电路
MMA7260Q与MC9S12DGl28B的硬件接口电路如图2 所示【…。微处理器内部包含完整的地输入缓存器、模拟开 关电路、可编程增益放大器和A/D转换器以及数字滤波 器,使用非常方便。g。,92输入低电平,灵敏度达到
output
由图6(a)可知,第1个尖峰表示智能车处于加速状 态,第2个尖峰表示智能车处于减速状态;由图6(b)可知,
调理、单极低通滤波和温度补偿技术。成本低、功耗低,测 试中加速度信号稳定性和灵敏度都达到了预期的效果。从 而提高了系统的控制精度,使舵机响应速度变快。 基于加速度传感器的路径识别设计方法,相比传统的 光电感应和图像捕捉抗干扰性更强,数据处理更简单。可
(a)主程序部分流程图
(a)flow chart
ofmain
番蓄
Fig
[jpJ
定时器献戗
3实验结果分析 测试1:当智能处于匀速直线运动时,对X-OUT,y-
(b)中断服务程序流程图
chart ofbreak in service program
OUT,Z・OUT分别采样600次,测试电压为3.42 V。计算出 600个点的期望值是105,方差为2.864 822,标准差为 1.701417622。加速度采样值正态分布如图4,由此可见加 速度传感器静止时输出采样值近似为105。
1.59。。…。
态。x,y,z输出端分别接RC滤波器,再通过高输出驱动 运算放大器TLV4112构成电压跟随作用,输出稳定的直流 电压信号。
通过每只传感器的相对输出值与加速度值作加权平均 就可以算出智能车相对于静止状态的各轴相对偏移位置
SD..:—N—ow—S—D—--_min,
max—ml/l
(1)
of
aecelerometer appUcafion
由以上测试,智能车路径识别的关键在于判断异形路径
井陕速、准确地响应。智能车行驶过程中,利用加速度传感器 输出信号波形可以判断出前方路径,从直道人弯、下坡过弯等 情况都能顺利通过,并增加了智能车对路径的跟随睦能。
智能车左右方向加速度信号,Z—OUT表示智能车上下方向
加速度信号.采样值经过数字滤波以后,通过Matlab绘制 出各个方向输出波形图。由于智能车的底盘不可能保持绝
A/D采样流程设计
本设计主要包括单片机初始化模块和实时路径检测模
对水平,车身可能会向前倾斜或者向后倾斜,所以,Y-OUT,
X—OUT,z—OUT输出值都有5%的误差,当处于匀速直线运
(Engineering
Center of the
Ministry
of
Education,Metallurgical Automation
Wuhan
University of
Science and Technology,Wuhan 430081,China)
Abstract:A design of path recognition based three—axis aecelerometer
Co)转弯或者漂移时分析图
Co)analysis
graph ofturn
Or
采样点数 (c)上,下坡时分析图
(e)analysis
graph ofup slope and down slope
drift
Fig
6
图6不同轴向输出波形图 Waveform of different axis direction
and
MC9S12DGl28B
2软件设计实现 本设计采用CodeWamor软件与BDM作为调试工具, 编程环境支持c语言和汇编语言的程序设计,大大方便了 用户的程序设计,提高了系统开发效率。本设计程序代码 使用C语言编写¨j。
2.1
2.3路径识别规则
x—OUT表示智能车前后方向加速度信号,Y-OUT表示
Acce=(∑SD。。G。)/(∑SD。)x3—1.5,
图2
Fig
2
(2)
MMA7260Q与MC9S12GDGl28B接口电路
circuit of
式中Acce为各个方向加速度值;SD。为当前加速度相对 输出值;G。为当前采样电压值所对应的加速度值;NowSD 为当前采样电压值。
Interface
MMA7260
car’S are
converted
saved in EEPROM.So the problem of the smart
path analysis is resolved
very
well.
car
Key
words:acceleration transducer;path recognition;smart
收稿日期:2009—1卜18
万方数据
126
传感器与微系统
第29卷
800 mV/g。。当Mode=l时,加速度传感器处于正常工作状
值,再除以各方向传感器的输出范围即可得到其相对输出 值。根据g,=92=0,最小值对应着一1.59。,最大值对应着 +1.59。,静止时各向加速度值为0,加速度范围为一1.5一
以广泛用于无人驾驶智能汽车、智能仪表、机器人步态特征
提取和故障诊断等。 参考文献:
[1]卓晴,黄开胜.学做智能车一挑战“飞思卡尔”杯[M].北
京:北京航空航天大学出版社,2007. m/赵憾靼智 [2] 苏维嘉,王旭辉.新型加速度传感器在倾角测量中的应用研 究[J].机械研究及应用,2007,20(5):63-65. [3]王威.HCSl2微控制器原理及应用[M].北京:北京航空航 智能车前进距离/m 图7加速度传感器应用效果图
MMA7260Q信号采集模块设计
加速度信号采集模块如图1所示。x,l,,z 3个相互垂
直方向上的加速度由G一(:ell传感单元感知,电容值经过容 压变换器转换为电压值,经过增益放大器、滤波器和温度补 偿以电压的形式作为输出信号拉J,经过放大滤波处理,将 所需模拟信号调整至一个合适的范围,再转换为数字信号 送数据处理单元。
表1路径判断规则表
Tab 1 Rule table of path
recognition
y-OUT X-OUT z.OUT
Y-OUT
X—OUT
z—OUT
状态
状态 【mV) (mV) (mV) (mV) (mV) (mV)
加速度信号采集部分设计流程图如图3所示。
值执耐X・OUT.Y—OtVf. z_0UT避礼鬻样.A/D转换
0引
言
1硬件电路设计
1.1
目前,智能车路径识别方法有2种:一是采用反射式红 外光电管,根据不同颜色对红外线的吸收程度不同来提取 特征信息,从而得知轨道的路径。这种方法的缺陷是光电 管的前瞻不够远,反射光线受外界光线干扰很大;二是采用 CCD摄像头获取轨道的图像信息,通过数字图像处理方法 得到轨道路径,这种方法的缺陷是过弯和坡道时容易采集 到轨道以外的信息而导致智能车偏离轨道,而且,图像数据 存储量大,信息处理比较复杂…。 本文利用Freescale公司的高灵敏度三轴加速度传感 器MMA7260Q可以测量智能车惯性大小,选取最佳重心位 置,并能准确定位智能车处于直线、弯道、坡道、漂移等运行 状态;利用加速度传感器能够提前预测路径,并判断何时刹 车效果最佳。实验结果证明:结合加速度传感器具有很强 的抗干扰性,提取角度信息更准确,确保了智能车在直道上 能够以较高的速度行驶,在弯道则能基本不失速平滑地过 弯。
5
图5
同一时刻三轴传感器采样值分布
of three-axis
sensor’s
Distribution
sampling
value
atthe slimetime
童
j塑
羹
}磐
童
趔
鞋
啦 怅
鞋
※
00
馔
00
采样点数
(a)加速和减速时分析图
(a)analysis graph ofspeed-up and slow・down
摘要:提出了一种基于加速度传感器的路径识别设计。该设计采用三轴加速度传感器MMA7260Q测 量智能车在运动中的加速度信号,以嵌入式单片机MC9S12DGl28B作为核心控制器,对加速度信号进行 采样,A/D转换,再将特征数据存储在EEPROM中。很好地解决了智能车运动路径分析的问题。 关键词:加速度传感器;路径识别;智能车 中图分类号:TP
on
acceleration transducer has been proposed.This design
car
uses
the of
to
MMA7260Q.It
detect the acceleration signal when the smart
iS moving.As the
core
controller.Embedded SCM MC9S1212DGl28B has been used.The acceleration signal iS sampled and digital data via the ADC of the microcontroller.Then the data
250 200
program(b)flow
图3程序流程图
3 Flow chart of
program
2.2数字滤波算法设计
由于加速度传感器三轴之间差异和较高灵敏度,防止 在运动过程中由于智能车的抖动引起的误差,对单片机采 样得到的电压值进行归一化处理,最后可得到各方向传感 器的相对电压值。具体实现方法:让智能车后轮转动起来, 分别记录各传感器输出信号的最大值和最小值,用最大值 减去最小值得到各传感器在运动过程中的输出范围。在智 能车行驶过程中将各方向传感器输出的信号值减去最小