ccd智能车路径识别
ccd巡线原理

ccd巡线原理CCD巡线原理CCD(Charge Coupled Device)是一种常用的图像传感器,广泛应用于工业自动化、机器视觉等领域。
CCD巡线是指利用CCD传感器实现机器人或智能车等设备沿着预定路径行驶的技术。
下面将详细介绍CCD巡线的原理和工作过程。
一、CCD传感器简介CCD传感器是一种将光信号转换为电信号的设备,它由一系列的光敏单元阵列组成。
每个光敏单元都能够将光信号转化为电荷,并将电荷传输到下一个单元。
通过对每个光敏单元的电荷进行读取和处理,可以得到一个完整的图像。
二、CCD巡线原理CCD巡线是利用CCD传感器对地面上的巡线路径进行感知和识别,从而实现机器人或智能车等设备的自动导航。
其基本原理是通过CCD传感器对巡线路径上的光线进行采集和处理,从而得到路径的相关信息。
具体来说,CCD巡线主要包括以下几个步骤:1. 光线采集:CCD传感器将光线转化为电荷,通过镜头对巡线路径上的光线进行采集。
2. 信号处理:CCD传感器将采集到的电荷信号转化为数字信号,并进行放大和滤波处理,以提高图像的质量和清晰度。
3. 图像分析:通过对处理后的图像进行分析,提取出巡线路径的特征信息,如颜色、形状等。
4. 路径识别:根据巡线路径的特征信息,利用图像处理算法对路径进行识别和定位。
5. 控制指令:根据路径的识别和定位结果,生成相应的控制指令,控制机器人或智能车沿着巡线路径行驶。
三、CCD巡线的优势CCD巡线相比其他巡线技术具有以下优势:1. 高分辨率:CCD传感器具有较高的分辨率,可以获取更为清晰和细节丰富的图像。
2. 高灵敏度:CCD传感器对光线的感应灵敏度较高,能够在较暗的环境下正常工作。
3. 高稳定性:CCD传感器具有较高的稳定性和可靠性,能够长时间稳定地工作。
4. 可编程性:CCD巡线系统可以通过软件对图像处理算法进行调整和优化,提高巡线的准确性和鲁棒性。
5. 实时性:CCD巡线系统可以实时地对图像进行处理和分析,实现快速响应和实时控制。
基于CCD的智能车寻迹方法
寻迹是机器人的一种简单视觉 ,基于电荷耦合 器件 (CCD) 的视觉导航是路径识别技术的一个重 要发展方向. 智能车系统以一个标准的汽车模型作 为载体 , 为 了 提 高 智 能 车 行 驶 的 速 度 和 稳 定 性 , CPU 需要将路径的迅速判断 、舵机与驱动电机的控 制紧密地结合在一起. 赛道底色为白色 ,标有黑色 中心线. 如何准确识别道路中心线参数 (位置 、角 度 、曲率等) ,计算出赛车与道路中心线的相对位置
的 A /D 转换器 ,最快 A /D 转换时间为 375 ns ,可 以满足视频信号的采集速度需要. 选用集成的 A /D 转换可以省去外部 A /D 转换的复杂的逻辑控制 , 且电路的实现极为简单.
由于所选的黑白图像传感器为 PAL 制 ,故行频 为 64 s ,场频为 20 ms ,行同步为 12μs (行消隐脉冲 4. 7μs) ,场同步脉冲宽度为 25 个行周期 (2. 048 ms) , 去掉行同步时间 ,则每行的有效信息时间为 52μs. 2407A 的最快 A /D 转换时间为 375 ns ,从数据可 靠性与稳定性的角度考虑 ,选择每行采集 40 个点 , 每场采集 200 行 ,但在实际应用中 ,每场采取每间 隔 10 行采集一行数据的策略 ,如此操作就能够满 足控制系统的精度要求. 这样 ,图像传感器每场的 数据变换成一个 20 行 、40 列的二维数组. 一般情况 下 ,只需要两块图像存储空间即可 ,一块作为采集 图像的存储空间 ,另一块作为处理缓冲区. 1. 3 存储空间的扩展
基于线阵CCD的智能小车路径识别系统_温阳东

第32卷第9期 2009年9月合肥工业大学学报(自然科学版)JO U RN AL O F H EFEI U N IV ERSIT Y OF T ECH N OL O GYVol.32No.9 Sept.2009收稿日期:2008 10 15;修改日期:2009 02 24作者简介:温阳东(1955-),男,安徽合肥人,合肥工业大学教授,硕士生导师.基于线阵CCD 的智能小车路径识别系统温阳东, 王祥好(合肥工业大学电气与自动化工程学院,安徽合肥 230009)摘 要:文章介绍了一种基于飞思卡尔HCS12单片机的智能车路径识别系统,该系统以CCD 摄像头传感器作为检测装置,直接采集CCD 输出的模拟信号,通过图像识别提取当前路径信息;与常规的光电传感器识别路径方案相比,使用摄像头传感器可以获取更多的路径信息,使智能车按任意给定的黑色引导线以较快的速度平稳地运行;实验证明该方法简便可靠,具有很好的前瞻性,能够满足智能车路径识别的需求。
关键词:图像识别;智能车;H CS12单片机;电荷耦合器件中图分类号:T P274 2 文献标识码:A 文章编号:1003 5060(2009)09 1348 04S tudy of smart car track identification based on the linear CCDWEN Yang do ng , WA NG Xiang hao(School of E lectric E ngineering an d Automation,H efei U nivers ity of T echnology,Hefei 230009,Chin a)Abstract:A smart car contro l system of the path infor mation identified based on CCD camera is intro duced.The sy stem uses the CCD sensor as its ro ute reco gnition device to sample the analo g v ideo sig nal directly from the CCD.And the current tr ack inform ation is dr aw n through imag e recog nition.Co mpar ed w ith the norm al ro ute recognitio n schem e by means of the photoelectric cell senso r,using the CCD sensor can obtain more path information,w hich makes the smart car run smoo thly at much rapid speed along the black g uide line g iven arbitr arily.T he exper im ental result show s that this meth o d is simple and efficient w ith go od forw ard loo king perspective,w hich can m eet the demands of smart car path recog nition.Key words:im age reco gnition;sm art car;free scale H CS12sing le chip com puter;char ge coupled de v ice0 引 言智能车系统设计是一种以智能汽车为研究背景的科技创意性制作。
基于CCD传感器的自动识别路径的智能车设计
基于CCD传感器的自动识别路径的智能车设计
梁伟;谢启天;周超;曾勇
【期刊名称】《湖北汽车工业学院学报》
【年(卷),期】2011(025)004
【摘要】智能车系统以MC9S 12XS128单片机为控制核心,以CCD传感器作为路径识别装置.对智能车自动寻线控制系统的软、硬件等进行了设计.测试结果表明,智能车能准确、快速、稳定地跟踪引导线.
【总页数】3页(P74-76)
【作者】梁伟;谢启天;周超;曾勇
【作者单位】湖北汽车工业学院汽车工程系,湖北十堰442002;湖北汽车工业学院汽车工程系,湖北十堰442002;湖北汽车工业学院汽车工程系,湖北十堰442002;湖北汽车工业学院汽车工程系,湖北十堰442002
【正文语种】中文
【中图分类】TP368.1;TP212.9
【相关文献】
1.基于摄像头的智能车实时路径识别模块设计 [J], 盛晓彦;于婷
2.基于路径识别自循迹智能车的设计 [J], 张振;赵玫;孔祥领;王立乾;殷培旭;杨洪勇
3.基于摄像头识别路径的智能车系统设计 [J], 高云波;季聪;汉鹏武
4.基于雾霾溯源的自循迹智能车的路径控制系统设计 [J], 孙佰全; 钱学明
5.基于视觉路径识别的智能车控制系统设计 [J], 焦冰;李琳;邱会然
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CMOS图像传感器的智能车路径识别与转向控制
摘要:本文基于第二届“飞思卡尔”杯全国大学生智能车竞 赛,在组委会提供 MC9S12DG128 单片机最小系统和竞赛 车模的基础上,采用 CMOS 图像传感器作为智能车的路径 检测传感器,扩大了智能车的检测范围,有利于智能车在快 速行进时对前方路况进行预判;在路径识别算法中,通过与 黑色灰度值比较来确定单行黑线位置;在转向控制方面,采 用了 PID 算法中的 PD 算法作为舵机的转向控制算法。经过 多次调试,赛车可以在规定的跑道上以较快的速度稳定行 进。
xaver = (xold 57) × D
(2)
yaver = ( yold 95) × L1 + L2
(3)
式(2)中的 57 和(3)中的 95 分别代表摄像
头一帧图像的列数和行数。当计算得到(xcent, ycent) 和(xaver, yaver)两点的坐标之后,很容易就可以计 算舵机应该偏转的角度α。
短的参赛队将获得最终的胜利。在比赛过程中,能 够准确识别赛道是赛车稳定行进的前提,常用的路 径检测传感器有红外二极管和 CCD/CMOS 图像传 感器[2]。由于红外二极管的检测范围有限,而且组 委会对传感器的数量有严格限制(传感器数量不超 过 16 个,红外传感器的每对发射与接受单元计为 1 个传感器,CCD/CMOS 传感器记为 1 个传感器); 另外,多个红外二极管或者单个 CCD 图像传感器 的功耗都比单个 CMOS 图像传感器的功耗要大。所 以本文选用了 CMOS 图像传感器作为智能车的路 径检测传感器,在降低智能车系统整体功耗的同 时,还扩大了赛车的检测范围,有利于赛车在快速 行进时对前方路况进行预判。本文主要针对如何利 用 CMOS 图像传感器识别赛道和赛车的转向控制 进行了探讨。
基于CMOS摄像头的智能车路径识别与方向控制毕业论文外文翻译

英文原文Route Identification and Direction Control of Smart Car Basedon CMOS Image SensorAbstractThis paper is designed for the 2nd Freescale Cup National Undergraduate Smart Car Competition. With MC9S12DG128 single chip and smart car model supplied by the committee, a CMOS image sensor is applied to detect the black track on white raceway, which extends the detection range and is helpful to predict the forward path. In this paper, ten-line pixels in an image are analyzed to locate the black track, and the PD algorithm based on PID is employed to control the direction and angle of the steering gear respectively. By repeated testing, the smart car can run stably on the given raceway at a high speed.Keywords: route identification, direction control, smart car, MC9S12DG128 single chip, image sensor, PIDalgorithm.1. IntroductionThe rules of 2nd Freescale Cup National Undergraduate Smart Car Competition [1] may be summarized as follows: the raceway consists of a lot of white boards on which a black track is attached; the smart car designed by participants runsalong the black track;every car runs two circles in this game and the best times of two circles will be the final score of this car, and apparently the team whose car takes the best times will bear the palm. According to the rules, we should ensure that the car can distinguish the black track from white board in order to make the smart car run stably. There are two common methods for route identification: one is using infrared diode as the sensor, and another is using CCD/CMOS image sensor [2]. This paper using CMOS image sensor as route identification sensor, the reasons for which are as follows: (1) The range which is covered by a infrared diode sensor is much smaller than a CMOS image sensor covers, and only we can do is to use several diode sensors, but the maximum number of diode sensors used in the smart car is 16; (2) The working voltage of a CMOS image sensor(3.3V) is less than a CCD(12V) or 16 infrared diodes. Apparently, using CMOS image sensor can not only reduce the power consumption but also extend the visible range of the smart car, and also enable the car to predict the forward path. This paper presents a systemic solution for identifying the raceway and controlling the direction of smart car.2. CMOS cameraThere are several kinds of CMOS image sensors in themarket. In comparison with other CMOS image sensors, the OV6130 CMOS image sensor [3] made by OmniVision Technologies Inc. is the best choice for us to design a CMOS camera for smart car whether from the viewpoint of cost and performance or power consumption. The OV6130 is a black and white sensor which has a 1/4 inch CMOS imaging devicecontaining approximately 101,376 pixels (352×288). This sensor includes a 356×292 resolution image array, an analog signal processor, dual 8-bit A/D converters, analog video multiplexer, digital data formatter, video port, SCCB interface, registers, and digital controls that include timing block, exposure control, black level control, and white balance.By assembling the experimental circuit we test the OV6130 output ports timing (VSYNC, FODD, HERF). Figure 1 shows theexperimental timing diagrams.(a) VSYNC-FODD timing(b) FODD-HERF timingFigure 1 OV6130 experimental timing diagramsFigure 2 Structure of the image capturing and displayingsystemReferring to the OV6130 datasheet, these timing diagrams match well with those given in datasheet, thus we produce the OV6130 CMOS camera based on the experimental circuit. In order to check whether the images captured by camera have clear definition and sharp contrast or not, and also to confirm the visible range of the camera, we design a VB program for capturing the images and displaying them on computer screen. This program bases on three hardware devices: CMOS camera, MCU or single chip, PC. Figure 2 presents how these three devices work together.Figure 3 compares the original image of a snake line of raceway with the image captured by CMOS camera and then displayed on screen by VB program. It can be seen that the captured image has clear definition and sharp contrast, and this lays a foundation for route identification to be discussedlater.(a) Smart car ready to scan the raceway(b) Captured image by CMOS cameraFigure 3 Comparison between original image and capturedimage3. Route identificationRoute identification aims at helping the smart car to recognize the forward track by a method which picks up the black line from the image captured by CMOS camera,and in fact, this method works well in the following cases:straight line, curving line and snake line. By repeated testing, we decide to analyze 10 lines of a whole image to predict the forward condition of smart car. Figure 4 illustrates how we analyze the 10-line pixels of an image.Figure 4 Route identification diagramThe detailed algorithm is introduced as follows:Step 1: Calculate coordinates of the black pixel for each line ready to be analyzed. As is illustrated in figure 4, the lines (L0, L1, …, L8, L9) are to be analyzed, and the white points (P0, P1, …, P8, P9) are black pixels for each line. The origin O is superposed by P9, which means there is no black pixel in line L9. Assumed that P(x) and P(y) indicate x-coordinate and y-coordinate of point P,respectively, here both P9(x) and P9(y) equal 0.The key of this step is to find the black pixel of each line. Here, by taking the following datum which shows the gray values of all pixels in a line as example, we introducea new approach:195 210 207 215 208 228 236 243 238 234 238 235 231 233 230 235 230 222 196 207 204 208 209 129 160 65 17 15 19 18 79 151 172 153 173 150 147 159 141 153 147 154 137 139 156 136 141 9 141 133 138 4 127 110 141 112 104(1) Assumed that P is the black pixel of this line, G(i)denotes a pixel and i indi cates it’s position in this line, V(i) is the grayvalue of G(i), j is the position of the first black pixel appearing in the line from left to right. Here both P(x) and P(y) are initiated to 0, and j is 0 from the start.(2) As for each pixel in this line from left to right,comparing its gray value with the black value B, here we set B as 30, G(i) is a black pixel on condition that V(i) is less than B. In the line above, the pixels underlined in bold, whose gray values are 17,15,16,18, are component points of the black track, and the pixels underlined both in bold and italic, whose gray values are 9,4, are invalid or interferential pixels. If V(i) is less than B, set j as i. Then compare V(j+1) and V(j+2) with B respectively, results go to two sides: ①If both V(j+1) and V(j+2) are less than B, check the gray value for each pixel from G(j+3) to the end pixel of this line. If the total number of white pixels whose gray values are greater than B surpasses or equals to 3, then set P as G(j+1). Otherwise, go to (3); ②If not, repeat this way from the point G(j+3) on.(3) If there is no black pixel in this line, set both P(x) and P(y) as 0.Step 2: Calculate the average coordinates of 10 black pixels.As is showed in Figure 4, M is the average point, M(x) and M(y)are expressed as follows:Step 3: According to the position of M in the image,we can decide in which direction (ahead, left, or right) the smart car should turn. In Figure 4, the smart car should turn right obviously.Step 4: Calculate how many angles the car should turn.Further descriptions is illustrated in Figure 5, where α is the very angle by which the car should turn right, F is the central point of two front wheels, M is the average point mentioned previously (see Figure 4), D and L1 indicate the width and height of the visible range of CMOS camera respectively, L2 is the distance between visible range and front wheels, L3 is a half of front wheel’s diameter, L2+L3 means the distance between visible range and the axis of front wheels. Referring to Figure 5, it is very easy to calculate the angle α.Figure 5 Calculating the angle for turning4. Direction controlThe central unit for direction control of smart car is steeringgear, its input signal is PWM (Pulse-Width Modulation) pulse, and it outputs corresponding angle in radian. This paper uses the PWM output port of MC9S12DG128 single chip [4] as the input signal of steering gear. By inputting the given discrete width of pulse, we test the relationship between the input and the output. The formula below expresses it:where X is tangential value of the output angle, Y is width of the input pulse, y0 is the corresponding value when the output angel equals 0 and k is slope. Using this linear relationship we can operate the smart car simply just by inputting the target angel, thus the width of pulse which is the input signal of steering gear can be computed easily,this method, however, doesn’t work well in the following cases: curving line andsnake track. Therefore we apply the PID [5] (Proportional, Integral, and Differential) controller which is very popular in fields of automation and control technology. The kernel theory of PID is to do proportional, integral and differential operations on the input difference respectively, then join the three results as the final output value. In practice, it is very flexible for us to use according to features and demands of the object to becontrolled. We may choose one or two or all of PID modules, for example, we can use proportional and integral modules to make up of PI controller.As for the smart car, it is no necessary to consider the tracks which have been gone across, so we only use proportional and differential modules as PD adjuster, and P adjuster has been described previously (see Formula(2)), and the following formula shows the D adjuster:where enew , eold define the differences of this time and last time when the angle is computed (here difference means the angel by which the steering gear should turn), t is scanning period of CMOS camera, kd is differential coefficient which runs from 0.5 to 1.5, D_out is the output of D adjuster.5. ConclusionsThe challenge of this work is a systemic solution for identifying the black route and controlling the direction of smart car. The performance of CMOS camera is apparently superior to infrared diode whether in scanning range or whether in power consumption, and the clear definition and sharp contrast of image are also important for the further recognition and control. By repeated testing, it is proved that the PD adjuster works well whenthe car runs whether on curving line or on snake track at a high speed, and the stability of smart car is also promoted.中文译文基于CMOS摄像头的智能车路径识别与标的目的控制摘要本文是为第二届飞思卡尔杯全国大学生智能车大赛而设计的。
CCD摄像头下的智能车路径识别及跟踪研究

科技创新CCD 摄像头下的智能车路径识别及跟踪研究薄晓宁(太原工业学院,山西太原030008)1CCD 摄像头智能车路径识别及跟踪的总方案CCD 摄像头下的智能车路径识别及跟踪系统,采用数字信号传输与视频信号交换为主的新型汽车信息记录方式。
如图1为CCD 摄像头下的智能车路径识别及跟踪系统的总的设计图。
CCD 摄像头下的智能车路径识别及跟踪系统通过CCD 摄像头以及其他汽车行驶感应系统,对汽车行驶路径进行识别和跟踪记录。
CCD 摄像头能够将汽车行驶路径信息转换为视频信号,系统内部将CCD 摄像头采集的视频信号经过二值化处理以及行场同步信号分离,对CCD 摄像头的汽车行驶路径进行综合分析,并依据地理信息定位系统给予的定位信息,对汽车行驶的路径进行定位分析,进而为汽车进行行驶路程规划。
最后,将经过智能化处理的信息传输给动力系统,汽车动力系统实现舵机控制与汽车驱动电机控制,在汽车行驶中实现对行驶轨迹的控制以及汽车行驶安全性的全面性检测分析[1]。
图1CCD 摄像头智能车路径识别及跟踪系统设计图此外,CCD 摄像头下的智能车路径识别系统在对行驶路路径信息总体分析的同时,也要注意与汽车导航系统视频图像的结合分析,并且在导航图像信号与系统分析信息之间建立信息传输平台。
CCD 摄像头下智能车路径识别系统与导航系统提供的视频图像相结合,采用二维视角的形式,进行汽车行驶系统数据的传输对接,最终电机控制系统依据系统的综合分析数据,在驱动电机控制下,实现汽车行驶路线的自动化控制[2]。
2智能车路径识别及跟踪的电路设计从电源管理电路、视频同步信号电路、二值化处理电路以及电机驱动电路4个角度出发,对CCD 摄像头下智能车路径识别及跟踪系统的电路设计方案进行了综合阐述:2.1电源管理电路电源管理电路设计方法如下:(1)考虑智能车路径识别及跟踪系统对于电力以及动力的需求,将供电电源确定为了电池,规格为6V 。
(2)采用直接供给的方法,对智能车进行供电,为智能车的运行提供驱动力。
基于摄像头的路径识别智能车控制系统设计

随着生产技术的发展和自动化程度的提高,传统制造业的生产方式发生了深刻的变化。
在自动化领域中,许多复杂性操作和或对人体有害的工作都由机器自动完成,为了实现这一工作,就要求机器有一定的智能性。
实时采集传感器信号,智能分析外部环境、路径信息,自动实现方向控制及速度调节,是智能车控制系统的主要特点,其设计内容涵盖机械、汽车、电子、自动控制、计算机、传感技术等多个学科的知识领域,作为一门新兴的综合技术,可广泛的应用于工厂自动料车、固定场地搬运车等技术领域,具有良好的应用前景。
它也可应用于复杂、恶劣的工作环境,是物流系统环节搬运设备的代表。
本文所述基于摄像头路径识别的智能车控制系统,以电动小车为研究对象,通过车载CCD摄像头动态摄取路面图像,识别白色场地中的任意黑色带状导引线,控制电动小车以设定目标速度沿导引线自动行驶,为使电动小车在行驶过程中保持一定的稳定性和平顺性,控制系统中对导引线路径信息识别、路径定位与方向偏差控制等主要控制功能提出了较为理想的解决方案。
1硬件结构与方案设计智能车控制系统以飞思卡尔公司高性能16位单片机MC9S12DP256为核心控制器,主要由电源管理、CCD摄像头、图像采集模块、电机及其控制器、转向舵机及其控制器、上位机调试等功能模块组成,其中上位机调试模块通过RS232串行接口与PC机通讯,结合基于MATLAB环境开发的应用软件实现在线综合调试、分析功能,系统总体结构如图1所示。
基于摄像头的路径识别智能车控制系统设计曾星星(湖北汽车工业学院汽车工程系T443-6,湖北十堰442002)摘要:介绍一种基于CCD摄像头的路径识别的智能车控制系统,设计了硬件结构与方案,提出了转向机构的控制策略,该智能车能准确实现自主寻迹,具备抗干扰性极强,稳态误差小等特点。
关键词:CCD摄像头;路径信息;智能车中图分类号:TP301文献标识码:A文章编号:1008-5483(2008)02-0072-05DesignofSmartCarControlSystemofPathInformationIdentifiedBasedonCCDCameraZengXingxing(Dept.ofAutomotiveEngineering,HubeiAtuomotiveIndustriesInstitute,Shiyan442002,China)Abstract:AsmartcarcontrolsystemofthepathinformationidentifiedbasedonCCDcamerawasintroduced.Thehardwarestructureandschemeweredesigned.Thecontrolstrategyofsteeringmechanismwaspresented.Thesmartcarnotonlycanidentifytheroadprecisely,butalsohaveanti-interferenceperformance,andsmallsteadystateerror.Keywords:CCDcamera;pathinformation;smartcar湖北汽车工业学院学报JournalofHubeiAutomotiveIndustriesInstitute第22卷第2期2008年6月Vol.22No.2Jun.2008第22卷第2期图2LM1881接口电路1.1电源管理模块电源管理模块为智能车系统各个模块提供特定电源,系统主电源由7.2V/2000mAh的Ni-cd蓄电池提供,其中图像采集模块所需电压为12V,核心控制器需5V电压供电,转向舵机工作电压为6.5V。
智能小车的路径识别问题
智能小车的路径识别问题摘要:智能小车路径识别技术是系统进行控制的前提,介绍了路径识别技术的几种分类及相应的优缺点,通过分析得出面阵CCD摄像更适合作为采集信息的工具。
关键词:智能小车;路径识别;面阵CCD摄像器件Abstract: Smart car’s path recognition technology is the premise of the control system, this paper introduces the path of several classification and recognition technology, through the analysis of the advantages and disadvantages of the corresponding to array CCD camera is more suitable for gathering information as the tool.Key words:smart car; Path recognition; Surface array CCD camera device0 引言:为培养大学生的自主创新设计的能力,各大高校都设置了智能车比赛,智能小车行驶在给定的白色路面,由中间的黑色轨迹线引导,实现自主循迹功能。
实现该功能的小车主要由电源模块、循迹模块、单片机模块、舵机模块、后轮电机驱动模块组成。
路径模块一般由ATD模块,外围芯片和电路,与路面信息获取模块组成,要能够快速准确得进行路径识别检测及相关循迹算法研究,本文就这两个方面进行相应的分析和介绍。
1 光电传感器1.1 反射式红外发射接收器半导体受到光照时会产生电子-空穴对,是导电性能增强,光线愈强,阻值愈低。
这种光照后电阻率变化的现象称为光电导效应[1],用于路径检测的反射式红外光电传感器基于此原理设计。
该传感器一般由一个红外线发射二极管和一个光电二极管组成,可以发射并检测到反射目的光线。
基于摄像头的智能车路径识别系统的设计

Computer Knowledge and Technology 电脑知识与技术人工智能及识别技术本栏目责任编辑:唐一东第6卷第28期(2010年10月)基于摄像头的智能车路径识别系统的设计黄娴1,张曦煌1,陆冬磊2(1.江南大学物联网工程学院,江苏无锡214122;2.无锡科技职业学院软服学院,江苏无锡214028)摘要:路径识别是智能车应用中的一项关键技术,直接决定了智能车行驶的质量。
本智能车采用飞思卡尔16位微控制器MC9S12DG128为核心控制单元,利用CCD 摄像头进行黑白道路图像采样以获取道路图像信息,通过二值化算法提取道路黑线,进而对小车的运行方向和速度进行控制。
实际测试表明,能较好地实现智能小车的路径识别功能。
关键词:智能车;CCD 摄像头;图像采样;路径识别中图分类号:TP391文献标识码:A 文章编号:1009-3044(2010)28-8083-03Design of Intelligent Vehicle Path Identification System based on CameraHUANG Xian 1,ZHANG Xi-huang 1,LU Dong-lei 2(1.School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China;2.School of Software and Service Outsourcing,Wuxi Professional College of Science and Technology,Wuxi 214028,China)Abstract:Path identification is a key technology in the application of intelligent vehicles.It directly determines the running quality of in -telligent vehicles.In this paper,we have developed an intelligent vehicle with advanced path identification algorithm.The embedded sys -tem is based on Freescale ’s 16-bit MCU,D cameras are used to collect image samples of monochrome road.Then the binary algorithm is introduced to extract road black-lines,through which the direction and speed of the intelligent vehicle is controlled.It is proved by experiments that our embedded system fulfills the path recognition task as an intelligent vehicle.Key words:intelligent vehicles;CCD cameras;image samples;path recognition随着半导体在汽车中的应用越来越普遍,汽车的电子化和智能化已成为行业发展的必然趋势。
基于线阵CCD的无人驾驶汽车路径跟踪导航系统
◆文/江苏 谭婷基于线阵CCD的无人驾驶汽车路径跟踪导航系统随着生活水平的大幅度提升,汽车已经成为最为常见的交通工具,再加上传感技术、网络技术以及计算机等技术发展水平的不断提高,汽车领域逐步朝着信息化以及智能化方向发展,尤其是以环境感知技术为基础的辅助驾驶技术已经取得了一定的研究成果,所以具有高度智能化特征的无人驾驶汽车已经成为汽车领域的未来发展趋势。
无人驾驶汽车可以利用车辆自带的传感器获取道路、车辆位置和障碍物信息,并利用相关技术对汽车的转向与速度进行精准控制,保证车辆行驶安全,该技术令道路交通系统从传统的“人-车-路”系统变为“车-路”系统,这样不仅能够提升驾驶智能化程度,还可以最大程度避免因交通事故而产生的生命财产损失。
由于无人驾驶汽车路径跟踪导航是无人驾驶领域最为重要的研究课题,也是保证汽车安全行驶的必要条件,因此研究无人驾驶汽车路径跟踪导航具有重要的研究意义。
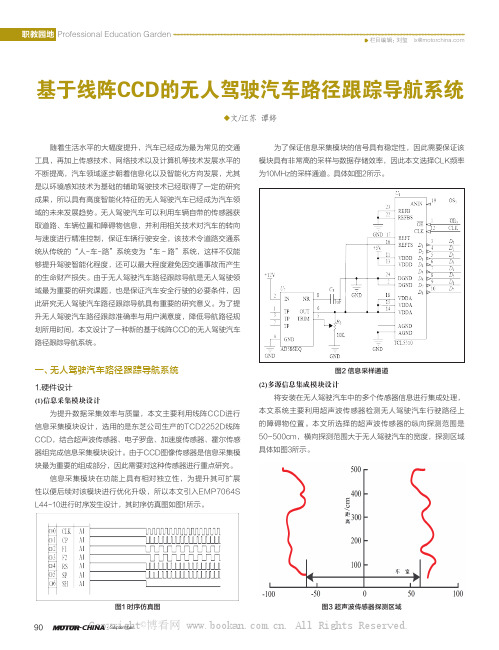
为了提升无人驾驶汽车路径跟踪准确率与用户满意度,降低导航路径规划所用时间,本文设计了一种新的基于线阵CCD的无人驾驶汽车路径跟踪导航系统。
一、无人驾驶汽车路径跟踪导航系统1.硬件设计(1)信息采集模块设计为提升数据采集效率与质量,本文主要利用线阵CCD进行信息采集模块设计,选用的是东芝公司生产的TCD2252D线阵CCD,结合超声波传感器、电子罗盘、加速度传感器、霍尔传感器组完成信息采集模块设计。
由于CCD图像传感器是信息采集模块最为重要的组成部分,因此需要对这种传感器进行重点研究。
信息采集模块在功能上具有相对独立性,为提升其可扩展性以便后续对该模块进行优化升级,所以本文引入EMP7064S L44-10进行时序发生设计,其时序仿真图如图1所示。
为了保证信息采集模块的信号具有稳定性,因此需要保证该模块具有非常高的采样与数据存储效率,因此本文选择CLK频率为10MHz的采样通道。
具体如图2所示。
图2 信息采样通道(2)多源信息集成模块设计将安装在无人驾驶汽车中的多个传感器信息进行集成处理,本文系统主要利用超声波传感器检测无人驾驶汽车行驶路径上的障碍物位置。
基于CCD的智能车循迹系统的研究
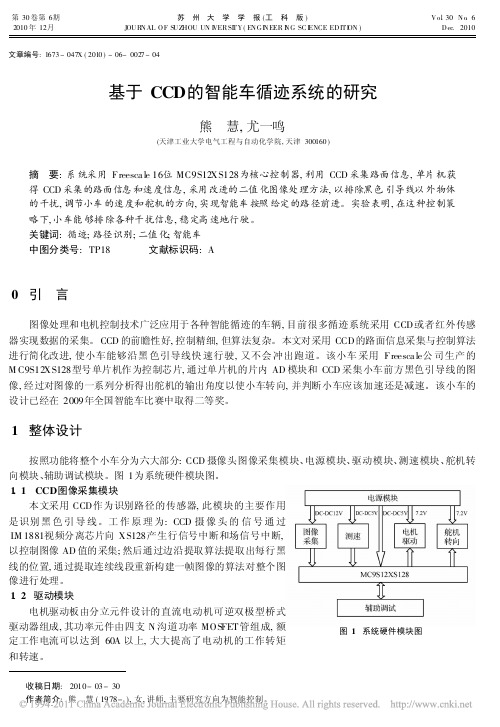
2 图像采集及处理
常用的摄像头视频输出信号是 PAL 制式 , 它的工作原理与电视机的工作原理相似: 在一定分辨率下 , 每 秒扫描 25帧图像 , 每帧图像含有 625 行信息 , 分为奇偶行 , 进行隔行扫描 , 扫描每秒 50 场信号 , 每场有 312 . 5 行信息 , 从奇数行开始扫描 , 即依次扫描第 1 、 3 、 5 、 7 、 9 帧图像。 行 , 当扫描完奇数行后 , 再开始扫描偶数行 , 构成一
O n th e S m art C ar Tracin g System Based on CCD
X iong H u,i You Y i m ing
( S chool of E lectrical E ngineering and A utom ation , T ian jin Po lytechn ic U n ivers ity, T ian jin 300160 , Ch in a)
0 引
言
图像处理和电机控制技术广泛应用于各种智能循迹的车辆 , 目前很多循迹系统采用 CCD 或者红外传感 器实现数据的采集。 CCD 的前瞻性好, 控制精细, 但算法复杂。本文对采用 CCD 的 又不会 冲出跑道。该小车 采用 F reesca le 公 司生产的 M C9S12XS128 型号单片机作为控制芯片, 通过单片机的片内 AD 模块和 CCD 采集小车前方黑色引导线的图 像 , 经过对图像的一系列分析得出舵机的输出角度以使小车转向, 并判断小车应该加速还是减速。该小车的 设计已经在 2009 年全国智能车比赛中取得二等奖。
基于 CCD 的智能车循迹系统的研究
熊 慧, 尤一鸣
(天津工业大学电气工程与自动化学院 , 天津 300160 )
基于线性CCD检测的寻线智能车设计与实现
基于线性CCD检测的寻线智能车设计与实现余世干,张廉洁,张旭东,戎强强(阜阳师范学院信息工程学院,安徽阜阳 236041)摘要:本设计以全国大学生智能车竞赛为背景,为了实现小车的自动循迹功能,提出了一种道路识别和最优的路线计算算法引导小车循迹行驶的方案.本文介绍了这一方案的基本思想,阐述了采集的原理,并根据这一原理对图像进行处理和路线的最优计算,最终实现了小车的自动循线的功能.关键词:智能车;阈值;灰度值;滤波TP23:A:1673-260X(2015)10-0065-031 引言自动循迹的智能车相当于移动的智能机器人,现在主要应用于餐厅餐盘的接送、仓库以及其他需要搬运设备的工作中,而线性CCD相当于智能机器人眼睛,小车通过传感器获取路径信息,并按一定的精度要求正确沿路径行驶.2 系统整体结构设计本设计中,要求智能汽车模型在规定45cm宽度的白色KT板,两边均为2cm黑色引导线的跑道上自动行驶,并可根据变化的形状,按行驶要求自主导航.这就要求智能车车具备较强的自适应能力.智能车在行驶的过程中还需要快速和稳定性的要求,因此,设计方案必须考虑传感器信号采集处理,陀螺仪和加速度计的调整,和电机差速控制策略的设计等因素.整个系统包括图像信息采集和处理,智能车的直立控制,电机差速的转向控制和速度的反馈,系统组成结构如图1所示,系统组成实物如图2所示.2 图像处理方案设计2.1 图像信息处理对跑道形状的识别正确与否决定了智能车车能否实现自动循迹功能.虽然当今图像处理算法已经有很多成熟的算法和应用,但如何有效地采用符合具体实际使用的算法则需要经过实际测试才能确认,图像处理包括对线性CCD信息采集,跑道状况的提取,路径的计算等.一般的设计流程包括图像信息采集,图像信息的处理,跑道信息的计算和行驶路线的优化这4个部分.图像信息采集时,单片机的端口与CCD的图像灰度信息输出引脚相连,线性CCD是单行采集图像的,并且采集回来的数据是灰度值,我们需要对灰度值进行二值化和滤波处理,最终确定跑道的路况情况.2.2 阈值提取方法在智能小车中常用的阈值提取方法有固定阈值法;取平均电压值作阈值与计算max与min的均值作阈值,通过对比分析得出本系统采用大津算法求阈值法.2.2.1 固定阈值主要思想在黑白电压值较稳定,浮动范围很小的情况下,如白色路面的电压始终在170上下极小的范围内浮动,黑色路面电压在50左右稳定,此时阈值可选范围很大,随机取一个100或120都是没问题的.但很多CCD存在畸变,视野两侧的电压始终很低,而且有时考虑到CCD视角的变化(如更改前瞻,焦距),图像的波动可能也会较大,用以下两种方法可能更实用.2.2.2 取平均电压值作阈值法计算出128个像素点电压的平均值,取此值作为图像二值化的阈值,可以增强环境的适应性,由于实际的黑白电压的门限不断变化且有一定的波动,或者外界光线亮暗略有不均,此方法依然能够适用.2.2.3 计算max与min的均值作阈值法需要对128个像素点做排序,取出电压最大与最小的两个像素点的电压值,取二者的平均值作阈值,通过实践测试,这种方法具有一定的效果,但是考虑到比赛赛场上的光线过强,加上CCD畸变的影响,即使加上偏振片,得到的图像可能仍不理想.2.2.4 大津算法求阈值由于比赛场馆的光线分布式不均匀的,如果采用固定的阈值会影响图像处理的效果,所以采用了大津算法动态求阈值.大津算法(OTSU)是一种确定图像二值化分割阈值的重要算法,这是由日本学者大津于1979年提出,从大津的原理上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进行图像二值化分割后,前景与背景图像的类间方差最大.原理:对于图像I(x,y),前景(即目标)和背景的分割阈值记作T,属于前景的像素点数占整幅图像的比例记为ω0,其平均灰度μ0;背景像素点数占整幅图像的比例为ω1,其平均灰度为μ1.图像的总平均灰度记为μ,类间方差记为g.假设图像的背景较暗,并且图像的大小为M×N,图像中像素的灰度值小于阈值T的像素个数记作N0,像素灰度大于阈值T 的像素个数记作N1,则有:采用遍历的方法得到使类间方差g最大的阈值T,即为所求.大津算法的形象理解:对于直方图有两个峰值的图像,大津法求得的T近似等于两个峰值之间的低谷.图3为图像的直方图,使大津法求得的T=0.5294,转换在[0,255]之间为134.9970,只好是两个峰值之间低谷的位置.2.3 系统图像处理过程图像处理的滤波算法较多,主要分为平均值滤波,中值滤波,限值滤波,滑动平均值滤波等.考虑到其他的滤波运算量大,需要占用大量内存,故采用了中值滤波和滑动平均值滤波相结合的算法.中值滤波的优点是能够有效克服因偶然因素引起的波动干扰,滑动平均滤波的优点是对周期性干扰有良好的抑制作用.在实际处理中,每次取一行中3个相邻列的灰度值,先判断这3个值是否有相同的灰度值,若灰度值相同则采用滑动平均值滤波,取平均值,并将第二个值修改为该平均值;若灰度值不同则采用中值滤波,并对这3个值进行排序,将第二个值修改为3个数值的中间值.该算法对一个像素点的过滤仪用到r相邻两个像素点的灰度值,计算量不大,占用内存不多,适合单片机的计算,且该算法相对来说较简单,时间复杂度不高,满足了小车对快速控制系统的要求.滤波前后图像对比如图4所示.2.4 跑道轨迹提取在滤波后的图像中,白色为小车的行驶范围,黑线为小车需要行驶的轨迹,因此,轨迹线的提取即为黑线,所以采用跟踪引线的黑线提取算法.假设某时刻找到某行的黑线中心位置m,则下一时刻在下一行的m附近搜寻黑线的左右边缘,然后计算该行的中心位置.该方法的特点是始终在前一行的引线中心位置附近寻找下一行的引线位置,故称为“跟踪”引线的黑线提取算法.该算法的优点是在首行引线检测正确的前提下具有较强的抗干扰性,能更有效地消除十字垂直交叉黑色引线的干扰以及引线外黑色噪点的影响,始终跟踪目标引导线.在试验过程中,发现该算法有一定的不足.由于是在连续邻域上跟踪引导线,因此,若第一行引线的检测位置和实际导引线偏差较大,将产生一连串的错误,甚至造成小车失稳.为防止这种现象的发生,可利用前面两行的引线中心位置来确定下一行的黑线位置.因为前两行同时出错的概率远远小于一行出错的概率,所以采用这种方法造成丢失引线的几率会大大减小.此外,针对每行中的孤立噪点,采用计数法排除.如果连续黑点数小于某个阈值时,认为是噪声影响,而非实际的黑线,从而可以减少误判概率.2.5 轨迹曲率处理对于道路形状的判断,可以采用曲率法.找到每行黑线的中心位置后,再进行道路曲率信息的计算,即可得出道路的类型.简单的曲率计算公式如下所示:q=I(X3-X2)-(X2-X1)I式中:x1,x2和x3为3个实际距离相等的行的黑线位置.行驶路径类型可以分为直道、曲率小的s弯、曲率大的S弯和普通弯道4类.u型弯道和0型弯道可以认为是多个同方向普通弯道连接在一起,因此,都可以被认为是普通弯道.若计算出来的曲率q接近0,则说明该段道路为直道或者小S弯;若曲率q比较大,则说明该段道路为普通弯道;若计算出来的曲率q非常大,则说明该段弯道为大S弯.在计算得到各段道路的具体类型之后,就可以进行小车行驶路径的优化.通常情况下,直道和小s弯道按照直线行驶通过;对于普通弯道,一般将小车行驶路线的曲率比道路弯曲程度大一点,尽量以微内圈的线路通过;对于大S弯道,需要将小车的行驶路线曲率比道路弯曲程度小一点,在不跑出道路的情况下尽量少走弯路,这样小车看到的弯道类型始终是大s弯道,即可以连续地走“小弯”路线通过,这样既节约时间,且行驶速度不会因为拐弯太大而过于减小,并保持匀速行驶.优化前后路径如图5所示,虚线代表实际道路形状,带箭头的实线代表优化后的路径形状.3 结束语采用线性CCD检测的循迹智能车系统的设计涵盖了多个学科交叉知识,利用K60芯片作为核心控制器,CCD作为路线探测器,本文针对智能车系统的具体实际的图像处理方案设计过程,具体包括图像信息处理,阈值提取方法,系统图像处理过程跑道轨迹提取,轨迹曲率处理等过程.经过实际检测,按照本文所设计的智能汽车模型能够在规定的直行、S型、十字交叉路口、斜坡、直角弯等赛道上自助导航行使,速度能达到2m/s的速度,满足实际需求.另外基于本文所研究思想,可以在其他自动控制领域发挥作用,这也是文章的另外一个目的.参考文献:〔1〕卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北航出版社,2007.〔2〕赵春燕,郑永果,王向葵.基于直方图的图像模糊增强算法[J].计算机工程,2005.〔3〕李忠海.图像直方图局部极值算法及其在边界检测中的应用[J].吉林大学学报,2003.〔4〕冈菩萨雷.数字图像处理[M].北京:电子工业出版社,2002.〔5〕吴怀宇.大学生智能汽车设计基础与实践[M].北京:电子工业出版社,2008.-全文完-。
基于CCD摄像头的智能小车系统的研制
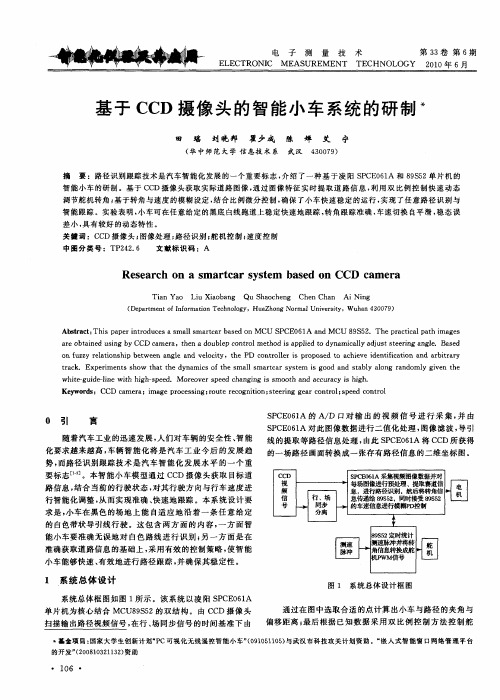
Re e r h o m a t a y t m a e n CCD a e a s a c n a s rc rs se b s d o cm r
Ab t a t Th s p p rit o u e ma l ma ta a e n M CU P sr c : i a e n r d c sa s l s r c rb s d o S CE0 1 a d M CU 9 5 .Th r c ia a h i g s 6 A n 8S 2 ep a tc l t p ma e
随着 汽车工业 的迅速 发展 , 人们对 车辆 的安全 性 、 智能
化 要求越来越 高 , 车辆 智 能化将 是 汽 车工 业 今后 的 发展 趋 势, 而路 径识别 跟踪技 术是 汽 车智 能化 发 展 水平 的 一个 重
要标 熹[ 。本智 能小 车模 型通过 C D摄像 头获 取 目 道 C 标
TinYa Li a b n QuS a c e g Ch n Ch n Ai n a o uXio a g ho hn e a Nig
( p rme to n o main Te h oo y,H u Zh n r lUnv riy De a t n fIf r t c n lg o a o gNo ma ie st ,W u a 3 0 9 h n4 0 7 )
( 中师 范 大 学 信 息技 术 系 武汉 华 摘 407) 3 0 9
要 :路径 识 别 跟 踪 技 术 是 汽 车 智 能化 发展 的一 个 重 要 标 志 , 绍 了一 种 基 于 凌 阳 S C 0 1 和 8 S 2单 片机 的 介 P E 6A 95
基于线阵ccd的直立智能车路径动态提取算法

基于线阵ccd的直立智能车路径动态提取算法随着智能车技术的发展,智能车的动态路径提取已经成为一个重要研究领域。
其中,基于线阵CCD的直立智能车路线动态提取算法是水平智能车路径动态提取算法的一种新型算法,它可以满足许多实际应用的需求。
本文从基于线阵CCD的直立智能车路径动态提取算法入手,结合相应的理论,深入研究直立智能车路线动态提取算法及其应用,具体表现在以下几点方面:一、线阵CCD和直立智能车路线动态提取算法简介:1、线阵CCD作为智能车的底部精确探测和跟踪系统,它能够实时、连续的有效采集图像,更好的满足路线动态提取的要求。
2、直接路径参数提取算法,是一种以直线为主的路径提取算法,它以折线的方式提取所需要的路径参数,以简化控制算法。
3、多项式路径参数提取算法,是一种以配置多项式函数为主的智能车路径提取算法,它可以实现像素地图的精确拟合,同时具有较好的拟合效果。
二、直立智能车路线动态提取算法的典型应用:1、机器人跟踪:采用线阵CCD和直立智能车路线动态提取算法可以对智能机器人的位置和移动轨迹进行实时、精确的采集和监控。
2、行人检测、追踪:采用线阵CCD和直立智能车路线动态提取算法,可以实现行人的实时定位,从而加强了行人检测系统的实时性。
3、车辆检测、追踪:采用基于线阵CCD的直立智能车路径动态提取算法能够更准确的检测到车辆的位置和移动轨迹,从而提高了车辆检测系统的准确性。
三、基于线阵CCD的直立智能车路线动态提取算法的关键技术:1、图像拼接技术:基于线阵CCD的直立智能车路径动态提取算法,将多幅地图图像拼接成一幅全局地图,再根据全局地图提取路径参数。
2、ROS技术:Robot Operating System (ROS)是一种基于软件平台的机器人操作系统,它可以支持智能车中执行器实时接收和发送控制信息,从而实现动态提取功能。
3、机器视觉技术:基于线阵CCD的直立智能车路径动态提取算法,通过机器视觉处理程序,对摄像头拍摄的图像进行处理,实现智能路径动态提取的任务。
219321313_基于CCD传感器的智能车路径识别研究

文章编号:2095-6835(2023)11-0050-04基于CCD 传感器的智能车路径识别研究*米汤,尚友良,符晓玲(昌吉学院,新疆昌吉回族自治州831100)摘要:为了实现无人控制智能车在不同道路上自主循迹行驶的目的,设计了一种基于CCD 传感器的智能车控制系统。
该控制系统以32位单片机STM32F103RCT6为控制核心,通过CCD 传感器采集路径图像信息,并通过核心控制器对图像进行二值化处理,以及采用动态阈值提取的方式选取阈值。
利用PID 控制算法实现电机的运转和舵机的转向。
通过实物验证,该控制系统成功实现了在不同道路环境下按照黑色引导线快速准确地行驶,行驶过程中智能车表现出较好的实时性和鲁棒性。
关键词:CCD 传感器;路径识别;图像处理;PID 控制中图分类号:TP391.4文献标志码:ADOI :10.15913/ki.kjycx.2023.11.013随着科学技术的发展和人类社会的进步,汽车行业进入了新的轨道,开始由传统制造向智能制造发展。
在新的发展趋势下,如何使智能车准确高效地识别路径是首要问题,这也受到了诸多学者的关注和研究。
目前路径识别的方法主要有光电传感器、视觉传感器和电磁传感器3种。
焦冰等[1]设计了一种以MK60DN512ZVQ10为控制器核心,OV7725视觉传感器获取赛道二值化图像的智能车控制系统,并采用PID 控制算法控制舵机的转向和驱动电机的转速。
冯玉如[2]、杜方鑫[3]设计了一种基于线性CCD 的智能车控制系统,采用线性CCD 采集路况信息,将采集到的路况信息发送给单片机,单片机根据阈值进行二值化处理,实现自动循迹的功能。
王海燕[4]设计了一种基于电磁传感器的路径识别系统,该系统采用6组相同电磁电路横向“一”字布局,大大提高了检测密度和广度,该设计提升了数据采集的效率和准确度,使得智能车的循迹更加稳定。
1智能车硬件总方案为了更好地实现智能车自主循迹,本文给出的设计方案硬件包括控制器核心模块、电源模块、摄像头驱动模块、电机驱动模块、舵机驱动模块和OLED 显示模块,整体硬件结构如图1所示。
智能车线性CCD路径识别方法
智能车线性CCD路径识别方法
胡世林;韩致信;崔继强
【期刊名称】《机械制造与自动化》
【年(卷),期】2015(000)004
【摘要】论述了TSL1404CL线性CCD的识别原理,设计了CCD路径识别系统硬件电路,分析固定阀值与动态阀值以及固定中心点边缘检测与浮动中心点边缘检测的优缺点,运用LabVIEW软件编写上位机界面,获取了不同检测方法下的赛道信息,优化了系统的控制策略,提高系统的响应速度和准确性。
实验证明该系统能在不同光照条件下准确识别赛道,具有很好的鲁棒性。
【总页数】3页(P123-125)
【作者】胡世林;韩致信;崔继强
【作者单位】兰州理工大学机电工程学院,甘肃兰州730050;兰州理工大学机电工程学院,甘肃兰州730050;滨州学院,山东滨州256603
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于线性CCD循迹智能车的设计与实现 [J], 黄锦阳;胡傲;秦浩杰;赵春锋
2.基于线性CCD的智能车路径识别方法 [J], 杨庆文
3.基于线性CCD追逐智能车系统的软件设计 [J], 叶梦君;张文财;;
4.基于线性CCD传感的实训类智能车系统的搭建与调控 [J], 何恩节;郑磊
5.基于线性CCD追逐智能车系统的硬件设计 [J], 张文财; 叶梦君; 黄仰来; 雷改惠
因版权原因,仅展示原文概要,查看原文内容请购买。
基于线性CCD的智能车路径提取与寻迹

基于线性CCD的智能车路径提取与寻迹
白晋龙
【期刊名称】《电子测量技术》
【年(卷),期】2016(0)3
【摘要】基于线性CCD提取赛道信息和按照赛道信息控制智能车寻迹是光电组智能车制作中的关键环节。
本文首先介绍了线性CCD,以及使用过程中应该注意的事项,然后介绍了黑白边界提取算法,采用腐蚀算法消除了赛道上污垢或阴影对边界提取的影响,提出了3种赛道寻迹方法,分别为中心线寻迹法、单边寻迹法、赛道预估法,详细比较了3种方法的优缺点,单边寻迹法不仅适用于各种赛道情况,而且处理信息少,占用CPU空间小。
最后利用单边寻迹法完成智能车制作,使用飞思卡尔单片机有限的资源保证在不冲出跑道的前提下完成了比赛。
【总页数】4页(P127-130)
【关键词】智能车;线性CCD;赛道检测;寻迹
【作者】白晋龙
【作者单位】北京交通大学电子信息工程学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.智能车线性CCD路径识别方法 [J], 胡世林;韩致信;崔继强
2.基于CCD的智能车寻迹方法 [J], 郑建立;黄丽佳;葛鹏飞;柳翔飞
3.基于线性CCD光电智能车的路径识别方法 [J], 董杰君;朱煦;刘思淼;潘雯钰
4.基于路径识别的寻迹智能车设计与实现 [J], 孙书诚;郎朗;王虎
5.基于路径识别的寻迹智能车设计与实现 [J], 孙书诚;郎朗;王虎
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
力,影响了智能车的快速性和稳定性。
2.基于模拟式输出的光电传感器阵列的智能控制
基于反射式红外传感器的模拟式输出的光电传感器阵列的路径检测方法,具有较高的可靠性与稳定性。它利用传感器对白色和黑色的反射率
其他地方考的:..........
(((摄像头的工作原理是:按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度一一
对应的电压值,然后将此电压值通过视频信号端输出。具体而言(参见下图),摄像头连续地扫描图像上的一行,则输出就是一段连续的电压信号,该电压
红外传感器的输出可分为数字式与模拟式红外传感器两种。数字式红外传感器具有与微处理器相对应的接口,使得硬件电路简单,但是存在采
集路径信息粗糙、丢失路径信息的缺点。模拟式红外传感器输出的模拟信号,通过将多个模拟式红外传感器进行适当的组合,可以再现赛道路
径的准确信息。在使用多个模拟式红外传感器的情况下,需占用微处理器较多的AD端口。
场同步信号等,这里只使用行同步、奇/偶场同步信号作为单片机进行视频AD采集的控制信号.有关于使用LM1881提取视频信号中的行、场同步
信号的电路原理如图2所示。
图2 LM1881视频同步分离电路
根据处理器MC9S12DG128进行AD采样与转换的时间要求,这里我们使用24MHz的总线速度,这样每采集一个点的时间大约是2us,每行的扫描时间
赛限制规则之一就是传感器的总数不能超过16个。由于路径识别在本智能车控制系统中的重要地位,而路径识别结果的好坏又与传感器的选择、
传感器的数量有直接关系,因此,本文针对应用于路径识别的传感器进行讨论。
传感器概述
光电传感器与CCD/CMOS图像传感器是较为常见的应用于路径识别的传感器。光电传感器由于本身物理结构、信号处理方式的简单而被广泛应用,
关键字:路径识别;智能车;红外传感器;图像传感器
引言
“飞思卡尔”杯全国大学生智能车竞赛是在飞思卡尔半导体公司资助下举办的以HCS12 MCU为核心的大学生课外科技竞赛。组委会提供了一个标
准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路线的智能车并在专门设计的跑道上自动识别道路行驶,其中比
2个异步串行通信接口(SCI),2个串行外围接口(SPI),1个8通道的输入捕捉/输出比较(IC/OC)增强型捕捉定时器,2个8通道、10位转换精度的
模数转换器(ADC),1个8通道的脉冲调制器(PWM),丰富的I/O资源,内部集成PLL锁相环,可以提高系统时钟工作频率。然而,S12单片机的上
限内部总线频率25MHz 。在此限制条件下,将微处理器的总线时钟设定为24MHz。
摄像头有两个重要的指标:有效像素和分辨率。分辨率实际上就是每场行同步脉冲数,这是因为行同步脉冲数越多,则对每场图像扫描的行数也越多。事实上
,分辨率反映的是摄像头的纵向分辨能力。有效像素常写成两数相乘的形式,如“320x240”,其中前一个数值表示单行视频信号的精细程度,即行分辨能力;
后一个数值为分辨率,因而有效像素=行分辨能力×分辨率。
值得注意的是,通常产品说明上标注的分辨率不是等于实际分辨率(即每场行同步脉冲数),而是等于每场行同步脉冲数加上消隐脉冲数之和。因此,产品说
明上标注的“分辨率”略大于实际分辨率。我们要知道实际的分辨率,就得实际测量一下)))。
图像传感器的智能控制方案应用于最终的大赛。
具体应用
针对2006年第一届“飞思卡尔”杯全国智能车邀请赛,我们采取了基于图像传感器的路径识别方案.其参赛的智能车的整体实物照片如图1所示.
图1 智能车整体实物照片
全国智能车邀请赛指定的唯一微处理器为Freescale公司的HCS12DG128B16位MCU,128K字节的Flash EEPROM,8K字节的RAM,2K字节的EEPROM,
但存在检测距离近的弱点。CCD/CMOS图像传感器能更早的感知前方的路径信息,但存在着复杂的信号输出方式所导致复杂的数据处理方式,从
而使很多研究者望而却步。但是随着计算机技术、高级人工智能技术的发展,CCD/CMOS图像传感器识别方案的研究也逐渐深入,将CCD/CMOS图
像传感器应用于智能车的路径识别是智能车研究的发展趋势。
左右,为了体现白黑的巨大差异,这里将A/D采集的参考电压调整为1.5V,从而使得AD采集的正常结果通常是在85~204之间.图3给出了图像
传感器所采集的部分原始路径数据值.
图3 图像传感器采集的直线部分的原始数据
结论
本文从传感器与路径识别的关系出发,讨论了红外传感器与CCD/CMOS图像传感器识别方案的优缺点,并从中优选出CCD/CMOS图像传感器用于
。利用CCD/CMOS图像传感器的特点在小车前方虚拟出24个光电传感器,能够精确地感知智能车的位置,并且硬件安装简单,调试方便。
4.基于CCD/CMOS图像传感器与光电传感器的智能融合控制
基于CCD/CMOS传感器的路径检测方法具有探测距离远的优势,能够尽可能早的感知前方的路径信息进行预判断,再现路径的真实信息。与光
是64us,去掉行消隐与行同步时间12us,每行有效信息时间为52us.从数据可靠性与稳定性的角度考虑,我们选择每行采集24个点,每场采集
200行,但在实际应用中,每场采取每间隔10行采集一行数据的策略,如此操作就能够满足控制系统的精度要求.这样,图像传感器每场的数据
变换成一个20行、24列的一个二维数组.由于微处理器HCS12DG128B的AD默认参考电压为5V左右,而视频信号的白电平为1.2V左右、黑电平0.5V
信号的高低起伏反映了该行图像的灰度变化。当扫描完一行,视频信号端就输出一个低于最低视频信号电压的电平(如0.3V),并保持一段时间。这样相当
于,紧接着每行图像信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉冲,它是扫描换行的标志。然后,跳过一行后(因为摄像头是隔行扫描的),
开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着又会出现一段场消隐区。该区中有若干个复合消隐脉冲,其中有个远宽于(即持续时间长于)
其它的消隐脉冲,称为场同步脉冲,它是扫描换场的标志。场同步脉冲标志着新的一场的到来,不过,场消隐区恰好跨在上一场的结尾和下一场的开始部分,
得等场消隐区过去,下一场的视频信号才真正到来。摄像头每秒扫描25 幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描50 场图像。奇场时只扫描
图像中的奇数行,偶场时则只扫描偶数行。
智能车的路径识别与传感。通过将基于面阵CCD/CMOS图像传感器的路径识别方案应用于第一届“飞思卡尔”杯全国大学生智能车竞赛,并从
众多使用红外传感器的参赛队伍中脱颖而出,从而证明了该方案较红外传感器在路径识别中更具潜在优势。
参考文献
[1] 黄开胜,金华民,蒋狄南.韩国智能模型车技术方案分析[J].电子产品世界,2006(3):150-152.
大小,把最大、最小值之间分为n个index区间,通过对各个传感器index值的组合基本能够确定智能车的位置,从而对位置和行驶方向都能做
较精确的控制。但这种方法对识别道路的计算量大,计算时间较长,且检测距离也不是很远[1]。
3.基于图像传感器的智能控制
基于CCD/CMOS图像传感器的路径检测方法具有探测距离远的优势,能够尽可能早的感知前方的路径信息以进行预判断,再现路径的真实信息
传感器与智能车路径识别
摘要:路径识别是体现智能车智能水平的一个重要标志,而传感器是智能车进行路径识别的关键检测元件。针对智能车在特殊路径与传感器数目
限制的条件下的路径识别,提出了基于红外传感器的路径识别方案与基于图像传感器的路径识别方案,并对两种方案的应用性能进行了比较。通
过将基于面阵图像传感器的路径识别方案应用于第一届“飞思卡尔”杯全国智能车竞赛并取得优异成绩,验证了该方案的可行性与有效性。
在这里只能选用CCD/CMOS图像传感器的信号输出格式为电视信号。
设计方案
针对第一届全国大学生智能车竞赛的赛道特色,基于上述对传感器的说明,下面讨论红外传感器与CCD/CMOS图像传感器的路径识别方案。
பைடு நூலகம்
1.基于数字式输出的光电传感器阵列的智能控制
基于反射式红外传感器的数字光电传感器阵列的路径检测方法具有较高的可靠性与稳定性,且单片机易于处理。虽然本次大赛限制的传感器
根据智能车赛道引导线与其背景的巨大反差的特点,这里只需要选择具有全电视信号输出的黑白图像传感器即可.由于所选的黑白图像传感器
为PAL制,故行频为64us,场频20ms,行同步为12us(行消隐脉冲4.7uS),场同步脉冲宽度为25个行周期(2.048 ms),去掉行同步时间,则每
行的有效信息时间是52us.通过将图像传感器输出的视频信号接至视频同步分离芯片LM1881的视频输入端,就可以得到行同步、场同步、奇/偶
CCD/CMOS图像传感器可分为线阵式与面阵式两种。线阵式图像传感器常常应用于系统对检测精度有特殊要求的场合,由于具有较高的精度,一
般价格较昂贵。面阵式图像传感器常被应用于普通的视频检测,价格较便宜。在实际应用中,常选用面阵式图像传感器。然而,由于常用的
CCD/CMOS图像传感器可分为USB接口与电视信号接口两种类型,需要使用者根据微处理器的处理能力进行选择。对于HCS12单片机的处理能力,
电传感器阵列配合使用具有远近结合的优势,且具有较高的稳定性和可靠性。但是本次大赛所要求的控制核心单片机MC9S12DG128,总线时钟
最高25M,无法实现高级的图像算法和控制算法,且硬件电路较为复杂。