51单片机基本知识汇总
51单片机知识点
51单片机知识点1. 什么是51单片机?51单片机是一种基于哈佛结构的微处理器,由Intel公司于1980年推出。
它采用了8位的CPU架构和内置ROM、RAM、I/O等外设,可以实现控制、通讯、数据处理等功能。
2. 51单片机的特点- 体积小、功耗低:由于采用了集成化设计,使得单片机的体积非常小,功耗也很低。
- 易于编程:由于内置了大量外设和指令集,使得编写程序变得十分简单。
- 成本低廉:与其他微处理器相比,51单片机的成本较为低廉。
- 可靠性高:由于采用了高度集成化设计,使得其可靠性非常高。
3. 51单片机的硬件架构51单片机主要由以下几部分组成:- CPU核心:包括ALU(算术逻辑运算器)、寄存器组、程序计数器等。
- 存储器:包括ROM(只读存储器)、RAM(随机存储器)等。
- 外设接口:包括串口、并口、定时计数器等。
- 中断系统:用于处理各种事件和异常。
4. 51单片机的指令集51单片机的指令集包括基本指令、扩展指令和特殊指令。
其中,基本指令包括算术逻辑指令、移位指令、跳转指令等;扩展指令包括乘法、除法等高级运算;特殊指令包括中断、IO操作等。
5. 51单片机的编程语言51单片机的编程语言主要有汇编语言和C语言两种。
汇编语言直接操作硬件,速度快,但难度较大;C语言则更加简单易学,但速度相对较慢。
6. 51单片机的开发环境51单片机的开发环境主要有Keil C51和SDCC两种。
Keil C51是一款商业化软件,具有良好的兼容性和稳定性;SDCC则是一款开源软件,支持多种平台。
7. 51单片机的应用领域由于其体积小、功耗低、成本低廉等优点,51单片机被广泛应用于各个领域。
例如:家电控制、电子游戏、车载电子设备等。
8. 51单片机常见问题及解决方法- 如何解决程序无法烧录?可能是芯片内部电压不稳定,可以尝试更换芯片或更换烧录器。
- 如何解决程序无法运行?可能是代码有误或硬件连接有问题,可以检查代码和硬件连接是否正确。
51单片机基础知识

51单片机基础知识单片机作为一种嵌入式微控制器,具有广泛的应用领域和技术需求。
本文将介绍51单片机的基础知识,包括其概述、硬件结构、编程语言和开发环境等内容。
通过本文的学习,读者可以对51单片机有初步了解,并为之后的学习和应用打下基础。
一、概述51单片机,是指Intel公司开发的一种8位微处理器。
它以其简单、稳定和可靠的特点,成为嵌入式系统开发中最常用的单片机之一。
51单片机由存储器、中央处理器、输入输出端口、计时器/计数器和各种外围设备组成。
二、硬件结构51单片机的硬件结构主要包括中央处理器、存储器、输入输出端口和计时器/计数器。
1.中央处理器51单片机的中央处理器是一种基于哈佛架构的8位微处理器,具有高性能和低功耗的特点。
它可以执行指令、进行算术逻辑运算和控制外围设备的工作。
2.存储器51单片机的存储器包括程序存储器和数据存储器。
程序存储器用来存储运行的程序代码,而数据存储器用于存储程序需要的数据。
3.输入输出端口51单片机通过输入输出端口与外部设备进行通信。
输入端口用于接收外部信号,输出端口用于输出控制信号。
4.计时器/计数器51单片机内置了多个计时器/计数器,用于定时和计数应用。
它们可以实现精确的时间控制,并为系统提供准确的时间基准。
三、编程语言51单片机的常用编程语言有汇编语言和C语言。
汇编语言是51单片机最早的编程语言,它直接与硬件进行交互,执行效率高。
而C语言是一种高级编程语言,具有结构化、可移植等特点,编写的程序更加易读易维护。
1.汇编语言汇编语言是一种低级别的编程语言,需要程序员直接处理寄存器和内存地址。
它的语法相对复杂,但可以更直接地控制硬件资源,实现更高效的程序执行。
2.C语言C语言是一种结构化的高级编程语言,具有简洁、易读和可移植等特点。
C语言程序需要通过编译器将源代码转化为机器指令,然后才能在51单片机上运行。
四、开发环境51单片机的开发环境包括硬件开发工具和软件开发工具。
51单片机初学知识点总结

51单片机初学知识点总结1. 什么是51单片机:51单片机是指Intel公司生产的8位单片机芯片系列。
51单片机由中央处理器单元(CPU)、随机存储器(RAM)、只读存储器(ROM)、输入输出端口以及中断系统等组成。
2. 51单片机的发展历史:51单片机最早在1980年由Intel公司发布,之后逐渐发展壮大。
目前,市面上有很多公司都生产和销售51单片机。
3. 51单片机的架构:51单片机采用Harvard结构,即程序存储器与数据存储器分开。
程序存储器分为片内存储器和片外存储器,数据存储器包括RAM和特殊功能寄存器。
4. 51单片机的寄存器:51单片机有一组特殊功能寄存器,用于存储和控制各种系统状态。
这些寄存器可以分为SFR(Special Function Register)和控制寄存器两种类型。
5.51单片机的引脚和IO口:51单片机有40个引脚,其中一些引脚是I/O(输入/输出)口。
这些I/O口可以配置为输入或输出,并可以被程序控制。
6.51单片机的时钟系统:51单片机需要一个时钟源来提供时钟信号。
时钟源可以是外部晶体振荡器或者片内RC振荡器。
7.51单片机的存储器:51单片机具有不同类型的存储器,包括内存区域、堆栈区域和特殊功能寄存器。
内存区域包括RAM和ROM,堆栈区域用于保存中断处理和函数调用的返回地址。
8.51单片机的指令集:51单片机具有丰富的指令集,可以执行各种操作,例如算术运算、逻辑运算、位操作和跳转等。
9.51单片机的中断系统:51单片机具有中断系统,可以响应外部中断和定时器中断。
中断可以打断当前执行的程序,并转移到中断处理函数。
10.51单片机的编程和调试:51单片机的编程可以使用汇编语言或高级语言(如C语言)进行。
调试可以使用模拟器或者仿真器进行。
11.51单片机的应用领域:51单片机广泛应用于各种控制系统和嵌入式系统,例如家用电器控制、电动工具、汽车电子等。
12.51单片机的扩展接口:51单片机可以与其他外设连接,例如LCD显示屏、键盘、温度传感器等。
51单片机自学笔记(基础部分)
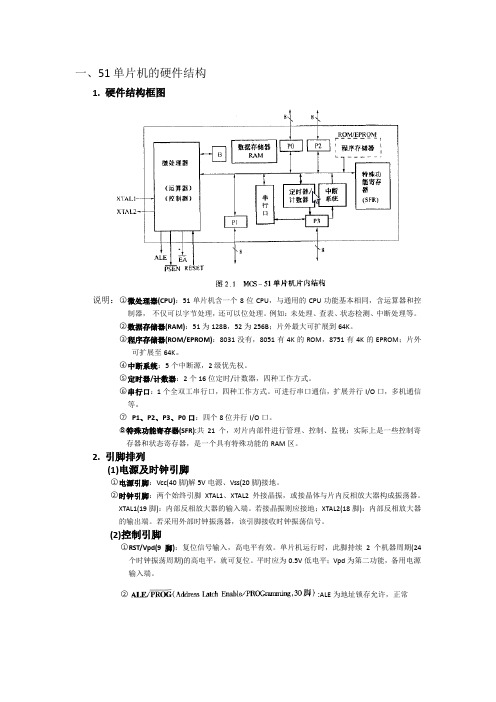
一、51单片机的硬件结构1. 硬件结构框图说明:○1微处理器(CPU):51单片机含一个8位CPU,与通用的CPU功能基本相同,含运算器和控制器,不仅可以字节处理,还可以位处理。
例如:未处理、查表、状态检测、中断处理等。
○2数据存储器(RAM):51为128B,52为256B;片外最大可扩展到64K。
○3程序存储器(ROM/EPROM):8031没有,8051有4K的ROM,8751有4K的EPROM;片外可扩展至64K。
○4中断系统:5个中断源,2级优先权。
○5定时器/计数器:2个16位定时/计数器,四种工作方式。
○6串行口:1个全双工串行口,四种工作方式。
可进行串口通信,扩展并行I/O口,多机通信等。
○7P1、P2、P3、P0口:四个8位并行I/O口。
○8特殊功能寄存器(SFR):共21个,对片内部件进行管理、控制、监视;实际上是一些控制寄存器和状态寄存器,是一个具有特殊功能的RAM区。
2. 引脚排列(1)电源及时钟引脚○1电源引脚:Vcc(40脚)解5V电源、Vss(20脚)接地。
○2时钟引脚:两个始终引脚XTAL1、XTAL2外接晶振,或接晶体与片内反相放大器构成振荡器。
XTAL1(19脚):内部反相放大器的输入端。
若接晶振则应接地;XTAL2(18脚):内部反相放大器的输出端。
若采用外部时钟振荡器,该引脚接收时钟振荡信号。
(2)控制引脚○1RST/Vpd(9脚):复位信号输入,高电平有效。
单片机运行时,此脚持续2个机器周期(24个时钟振荡周期)的高电平,就可复位。
平时应为0.5V低电平;Vpd为第二功能,备用电源输入端。
○2:ALE为地址锁存允许,正常工作时,ALE不断输出正脉冲信号。
当访问外部存储器时,ALE输出信号的负跳变沿用作低8位地址的锁存信号;PROG’为编程脉冲输入端。
○3PSEN’(Program Strobe Enable,29脚):程序存储器允许输出控制端。
低电平是外部程序存储器选通。
51单片机基础知识总结(最新)ppt课件

第0章 计算机的基础知识
(01111111B); 16位带符号数的原码范围为:-32767(1000000000000000B)~ +
32767 (0111111111111111B) 问题:已知一个数的反码,怎么求它的真值呢? (2)同原码相似,反码表示也不适宜用简单的加法器来进行运算。 Eg : 5+(-3)=
绪论
3、补码(Two’s complement)表示法
第0章 计算机的基础知识
0.1.2 微机的基本工作原理
存储程序、执行程序是微工作过程。
单片机是微型计算机的一种,是将计算机主机(CPU、 存储器和I/O接口)集成在一小块硅片上的微机,又称微 控制器。它专为工业测量与设计而设计,具有三高优势 (集成度高、可靠性高、性价比高),他的特点是小而全 (体积小,功能全),主要应用于工业检测与控制、计算 机外设、智能仪器、仪表、通信设备、家用电器等,特别 适合于嵌入式微型机应用系统。
并行、串行接口 定时器、A/D、D/A
微机系统
硬件 软件
总线
外部设备
外围设备
辅助设备 系统软件 应用软件 程序设计语言
输入设备 输出设备 辅助存储器
电源电路 时钟电路
第0章 计算机的基础知识
CPU是计算机的控制核心,它的功能是执行指令,完 成算术运算、逻辑运算,并对整机进行控制。
存储器用于存储程序和数据。 输入/输出接口(又称I/O接口)是CPU和外设之间相 连的逻辑电路,外设必须通过接口才能和CPU相连。不同 的外设所用接口不同。每个I/O接口也有一个地址,CPU通 过对不同的I/O接口进行操作来完成对外设的操作。 存储器、I/O接口和CPU之间通过总线相连。 用于传送程序或数据的总线称为数据总线;地址总线 用于传送地址,以识别不同的存储单元或I/O接口;控制 总线用于控制数据总线上数据流送的方向、对象等。
第1章 51单片机的基础知识

第1章 51单片机的基础知识51单片机是一种广泛应用的嵌入式微控制器,具有强大的功能和灵活性。
在学习和使用51单片机之前,了解其基础知识是至关重要的。
本章将介绍51单片机的基础知识,包括硬件结构、寄存器、指令集和编程语言。
1.1 51单片机的硬件结构51单片机的硬件结构是指其内部的组成部分和外部连接。
51单片机包含中央处理器(CPU)、存储器、输入/输出(I/O)口、定时器/计数器、串行通信口等功能模块。
这些功能模块共同协作,完成各种任务。
1.1.1 中央处理器(CPU)51单片机的中央处理器是核心部件,负责执行指令、控制程序运行和处理数据。
51单片机采用哈佛结构,将程序存储器和数据存储器分开。
它包含一个8位的累加器(A)和一个指令寄存器(IR),用于指令的执行。
1.1.2 存储器51单片机的存储器包括程序存储器和数据存储器。
程序存储器用于存储程序指令,可以是内部存储器或外部存储器。
数据存储器用于存储程序运行中产生的数据,包括RAM和ROM。
1.1.3 输入/输出(I/O)口51单片机具有一定数量的I/O口,用于与外部设备进行数据交互。
输入口用于接收外部信号,输出口用于发送数据或控制外部设备。
它们可以是并行口或串行口,根据需要进行配置。
1.1.4 定时器/计数器定时器/计数器是51单片机的重要组成部分,用于产生定时延迟和计数脉冲。
定时器可以设置为定时模式或计数模式,定时器中断可用于实现时间控制和精确计时。
1.1.5 串行通信口串行通信口是51单片机与外部设备进行串行通信的接口,常用的有UART和SPI。
它们通过串行传输数据,实现与外部设备的数据交换和通信。
1.2 51单片机的寄存器51单片机具有一组特殊功能寄存器,用于配置和控制其各项功能。
这些寄存器负责存储和传输数据,执行各种功能操作。
常见的寄存器包括通用寄存器、状态寄存器、特殊功能寄存器等。
1.2.1 通用寄存器通用寄存器是用于存储临时数据的寄存器,包括8个存储器编号,分别为R0 - R7。
C51单片机知识总结

C51单片机知识总结C51单片机知识总结单片机I/O口的使用51单片机总共有P0、P1、P2、P3四个8位双向输入输出端口,每个端口都有锁存器、输出驱动器和输入缓冲器。
4个I/O端口都能作输入输出口用,其中P0和P2通常用于对外部存储器的访问。
在无片外扩展存储器的系统中,这4个端口的每一位都可以作为准双向通用I/O端口使用。
在具有片外扩展存储器的系统中,P2口作为高8位地址线,P0口分时作为低8位地址线和双向数据总线。
下图为P0口的某位P0.n(n=0~7)结构图,它由一个输出锁存器、两个三态输入缓冲器和输出驱动电路及控制电路组成。
从图中可以看出,P0口既可以作为I/O 用,也可以作为地址/数据线用。
①输出时CPU发出控制电平“0”封锁“与”门,将输出上拉场效应管T1截止,同时使多路开关MUX把锁存器与输出驱动场效应管T2栅极接通。
故内部总线与P0口同相。
由于输出驱动级是漏极开路电路,若驱动NMOS或其它拉流负载时,需要外接上拉电阻。
P0的输出级可驱动8个LSTTL负载。
②输入时----分读引脚或读锁存器读引脚:由传送指令(MOV)实现;下面一个缓冲器用于读端口引脚数据,当执行一条由端口输入的指令时,读脉冲把该三态缓冲器打开,这样端口引脚上的数据经过缓冲器读入到内部总线。
读锁存器:有些指令如:ANLP0,A称为“读-改-写”指令,需要读锁存器。
上面一个缓冲器用于读端口锁存器数据。
**原因:如果此时该端口的负载恰是一个晶体管基极,且原端口输出值为1,那么导通了的PN结会把端口引脚高电平拉低;若此时直接读端口引脚信号,将会把原输出的“1”电平误读为“0”电平。
现采用读输出锁存器代替读引脚,图中,上面的三态缓冲器就为读锁存器Q端信号而设,读输出锁存器可避免上述可能发生的错误。
**P0口必须接上拉电阻;在读信号之前数据之前,先要向相应的锁存器做写1操作的I/O口称为准双向口;三态输入缓冲器的作用:(ANLP0,A)准双向口:从图中可以看出,在读入端口数据时,由于输出驱动FET并接在引脚上,如果T2导通,就会将输入的高电平拉成低电平,产生误读。
51单片机基础知识 (问答题)
1、单片机的机器周期、状态周期、振荡周期和指令周期之间是什么关系?答:一个机器周期恒等于6个状态周期或12个振荡周期,即1M=6S=12P。
2、存储器中有几个保留特殊功能的单元用做入口地址?作用是什么?答:MCS-51系列单片机的存储器中有6个保留特殊功能单元;作用:0000H为复位入口、0003H为外部中断0入口、000BH为T0溢出中断入口、0013H为外部中断1入口、001BH为T1溢出中断入口、0023H为串行接口中断入口。
3、开机复位后,CPU使用是的哪组工作寄存器?它们的地址是什么?CPU如何确定和改变当前工作寄存器组?答:开机复位后,CPU使用的是第0组工作寄存器。
它们的地址是00H~07H。
CPU通过对程序状态字PSW中RS1、RS0的设置来确定和改变当前工作寄存器组。
如:RS1、RS0为00则指向第0组;为01则指向第1组;为10则指向第2组;为11则指向第3组。
4、MCS-51的时钟周期、机器周期、指令周期的如何分配的?当振荡频率为8MHz时,一个单片机时钟周期为多少微秒?答:MCS-51的时钟周期是最小的定时单位,也称为振荡周期或节拍。
一个机器周期包含12个时钟周期或节拍。
不同的指令其指令周期一般是不同的,可包含有1~4个机器周期。
当振荡频率为8MHz时,一个单片机时钟周期为0.125μs 。
5、EA/V引脚有何功用?8031的引脚应如何处理?为什么?PP答:EA/V是双功能引脚:PP(1)EA接高电平时,在低4KB程序地址空间(0000H~0FFFH),CPU执行片内程序存储器的指令,当程序地址超出低4KB空间(1000H~FFFFH)时,CPU将自动执行片外程序存储器的指令。
(2)EA接低电平时,CPU只能执行外部程序存储器的指令。
8031单片机内部无ROM,必须外接程序存储器。
因此,8031的EA引脚必须接低电平。
在对8751单片机内部的 EPROM编程时,此引脚V外接+12V电压,用于固化EPROM程PP序。
51单片机基础知识必备

51单片机基础知识必备一. 基础知识必备1 . 单片机复位引脚——RST当输入连续两个机器周期以上的高电平时为有效,用来完成单片机复位的初始化操作,复位后的程序计数器PC = 0000H,即复位后将从程序存储器的0000H单元读取第一条指令代码。
通俗的讲,就是单片机从头开始执行程序。
2.PSEN 全称是程序储存器允许输出控制端。
在读取外部程序储存器时,PSEN低电平有效,以实现外部程序储存器的读操作。
(内存足够了,没必要)3.电平重要知识点CMOS电路中不使输入端悬空,否则会造成逻辑混乱。
CMOS电平能驱动TTL电平,但是TTL电平不能驱动CMOS电平,需加上拉电阻4. 51系类扩展数据类型sfr——特殊功能寄存器的数据声明,声明一个8位寄存器。
sfr16 ——16位特殊功能寄存器的数据声明。
sbit ——特殊功能位声明,就是声明某一个特殊功能寄存器中的某一位。
bit ——位变量声明,当定义一个位变量时,可使用此符号。
5. 电阻的标志读数如果标称是103,就是10*10^3欧姆,150表示15*10^0欧姆,三位数表示5%精度,四位数表示1%精度6.要牢记,51MCU上电时,如果没有人为的控制IO状态,它所有的IO口都将是高电平,因此,我们没有必要写一句让锁存端置于高电平的语句7.和MCU有关的周期(1)时钟周期,也称震荡周期,定义为时钟频率的倒数。
MCU中最小的事件单位(2)状态周期,他是时钟周期的两倍(3)机器周期,MCU的基本操作周期,在一个操作周期内,MCU完成一个基本操作,如读取指令,储存器的读写。
它由12个时钟周期(6个状态周期组成)(4)指令周期,他是指MCU执行一条命令所需要的事件,一般一个指令周期含有1~4个机器周期8.“消影”——P0 = 0xff每次送完段选数据之后,在送入为选数据之前,需加上P0 = 0xff。
9 中断概念51内部有5个终端源,也就是说有5种情况发生,会使得单片机去处理终端程序。
51单片机基础知识
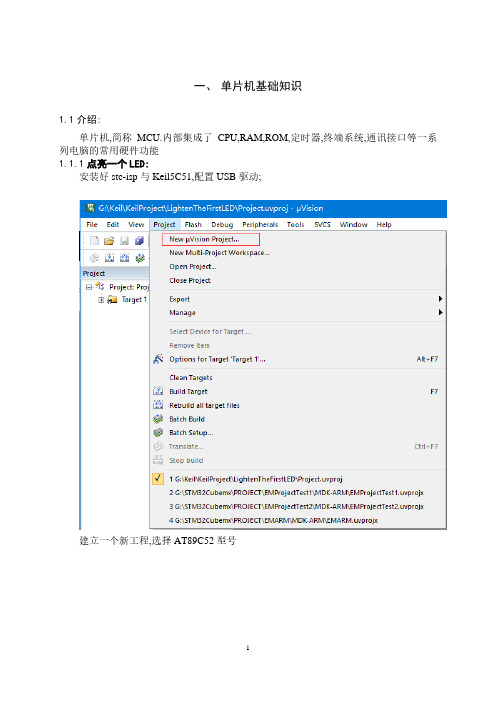
一、单片机基础知识1.1介绍:单片机,简称MCU.内部集成了CPU,RAM,ROM,定时器,终端系统,通讯接口等一系列电脑的常用硬件功能1.1.1点亮一个LED:安装好stc-isp与Keil5C51,配置USB驱动;建立一个新工程,选择AT89C52型号添加新文件选择C语言(通常情况下)通过调节P20的电压实现点亮/熄灭写好程序勾选创建HEX文件,再次编译;配置芯片型号(带RC选RC)与串口点击打开程序文件打开HEX文件下载到单片机;查找时重启单片机电源;成功点亮1.1.2LED闪烁:可从此处进行延时函数复制(系统频率一般默认为12Hz)#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_()void Delay500ms() //@12.000MHz{unsigned char i, j, k;_nop_();i = 4;j = 205;k = 187;do{do{while (--k);} while (--j);} while (--i);}void main(){while(1){P2 = 0xFE;//1111 1110 There is a pressure drop across the diode Delay500ms();P2 = 0xFF;//1111 1111 There isn't a pressure drop across the diode Delay500ms();}}使用此函数进行LED闪烁;1.1.3LED流水灯:通过控制P2管脚的十六进制数值改变对应LED灯的压降,实现亮/灭;P2实际上为8位一体的导线;P2_X则可以操作单独的LED控件#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_()void Delay1ms(unsigned int xms) //@12.000MHz{unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}void main(){while(1){P2=0xFE;//1111 1110 D1Delay1ms(500);P2=0xFD;//1111 1101 D2Delay1ms(500);P2=0xFB;//1111 1011 D3Delay1ms(500);P2=0xF7;//1111 0111 D4Delay1ms(500);P2=0xEF;//1110 1111 D5Delay1ms(500);P2=0xDF;//1101 1111 D6Delay1ms(500);P2=0xBF;//1011 1111 D7Delay1ms(500);P2=0x7F;//0111 1111 D8Delay1ms(500);}}1.2独立按键控制LED亮灭:通过查询原理图发现,K1独立按键对应P3_1;#include<REGX52.H>//The Definitionvoid main(){while(1){if(P3_1){//UPP2_0=1;//D1 Dark}else{//DOWNP2_0=0;//D1 Light}}}1.2.1独立按键控制LED状态:按键抖动:对于机械开关,当机械触点断开,闭合时,由于机械触点的弹性作用,一个开关在闭合时不会马上稳定地接通,在断开时也不会立刻断开,开关闭合/断开时往往伴随着波动#include<INTRINS.H>//Using the _nop_()void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}void main(){while(1){if(!P3_1){//DOWNDelay(20);while(!P3_1);Delay(20);P2_0=~P2_0;}}}消除误差1.2.2独立按键控制LED显示二进制unsigned char 用来表示一个寄存器#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_() void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}void main(){unsigned char LEDNumber = 0;while(1){if(!P3_1){//DOWNDelay(20);while(!P3_1);Delay(20);LEDNumber++;P2=~LEDNumber;}}}对P2进行取反操作则为计算二进制数值1.2.3独立按键控制LED移位:#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_() void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}void main(){unsigned char LEDNumber=0;P2=~0x01;//Rename the character while(1){if(!P3_0){//K2 DOWN Moving RightDelay(20);while(!P3_0);Delay(20);LEDNumber++;if(LEDNumber>=8){LEDNumber=0;}P2=~(0x01<<LEDNumber);}if(!P3_1){//K1 DOWN Moving LeftDelay(20);while(!P3_1);Delay(20);if(!LEDNumber){LEDNumber=7;}else{LEDNumber--;}P2=~(0x01<<LEDNumber);}}}包括左移(K1)和右移(K2);if语句中为消除误差+移动计算;通过改变P2总导线压降,来控制对应LED灯的亮灭首先对P2进行初始化0000 0001 D1亮0x01<<00000 0010 D2 亮0x00<<1....1000 0000 D8亮0x00<<81.3静态数码管显示:确定静态数码管显示时,先根据所选型号与待输出数据确定位选(3.8引脚的高低电平)与段码(剩下引脚的高低电平)通过此两排端口进行控制,下方端口由P0控制通过138译码器实现仅一位LED为1的操作(其余为0),通过观察真值表确定端口: 三端口为P2引脚.C B A Y0 0 0 70 0 1 60 1 0 50 1 1 41 0 0 31 0 1 21 1 0 11 1 1 0DIR控制数据传输方向DIR通过J24控制电平高低.当DIR接高电平时,从左向右传输数据#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_()void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}unsigned char NixieTabel[]={0x3F,0x30,0x5B,0x4F,0x66,0x6D,0x7D,0x07};void Nixie(unsigned char Location, Number){ switch(Location){case8:{P2_4=0;P2_3=0;P2_2=0;break;}case7:{P2_4=0;P2_3=0;P2_2=1;break;}case6:{P2_4=0;P2_3=1;P2_2=0;break;}case5:{P2_4=0;P2_3=1;P2_2=1;break;}case4:{P2_4=1;P2_3=0;P2_2=0;break;}case3:{P2_4=1;P2_3=0;P2_2=1;break;}case2:{P2_4=1;P2_3=1;P2_2=0;break;}case1:{P2_4=1;P2_3=1;P2_2=1;break;}}P0=NixieTabel[Number];}void main(){unsigned int location = 1, number = 0;while(1){if(location > 8){location = 1;number = 0;}Delay(1000);Nixie(location,number);location++;number++;}}1.3.1动态数码管显示在实现显示多个数据时,清零上一个数据,实现消影#include<REGX52.H>//The Definition#include<INTRINS.H>//Using the _nop_()void Delay(unsigned int xms){unsigned char i, j;while(xms){i = 2;j = 239;do{while (--j);} while (--i);xms--;}}unsigned char NixieTabel[]={0x3F,0x30,0x5B,0x4F,0x66,0x6D,0x7D,0x07};void Nixie(unsigned char Location, Number){switch(Location){case8:{P2_4=0;P2_3=0;P2_2=0;break;}case7:{P2_4=0;P2_3=0;P2_2=1;break;}case6:{P2_4=0;P2_3=1;P2_2=0;break;}case5:{P2_4=0;P2_3=1;P2_2=1;break;}case4:{P2_4=1;P2_3=0;P2_2=0;break;}case3:{P2_4=1;P2_3=0;P2_2=1;break;}case2:{P2_4=1;P2_3=1;P2_2=0;break;}case1:{P2_4=1;P2_3=1;P2_2=1;break;}}P0=NixieTabel[Number];Delay(1);P0=0x00;//Creat Last digit.}void main(){while(1){Nixie(1,5);Nixie(2,2);Nixie(3,0);}}1.3.2LCD1602调试工具LCD_Init();//初始化LCD_ShowChar(1,1,'A');//显示一个字符LCD_ShowString(1,3,"Hello");//显示字符串LCD_ShowNum(1,9,123,3);//显示十进制数字LCD_ShowSignedNum(1,13,-66,2);//显示有符号十进制数字LCD_ShowHexNum(2,1,0xA8,2);//显示十六进制数字LCD_ShowBinNum(2,4,0xAA,8);//显示二进制数字1.4矩阵键盘:矩阵按键按列扫描P引脚均为弱上拉,即同时输入1&&0,输出0添加如下文件:#include <REGX52.H>#include "Delay.h"unsigned char MatrixKey(){unsigned char KeyNumber=0;//先判断列数,再判断行数,避免电平错位P1=0xFF;//全部置为高电平P1_3=0;//仅启动P1_3--即第一列 if(!P1_7){Delay(20);while(!P1_7);Delay(20);KeyNumber=1;}if(!P1_6){Delay(20);while(!P1_6);Delay(20);KeyNumber=5;}if(!P1_5){Delay(20);while(!P1_5);Delay(20);KeyNumber=9;}if(!P1_4){Delay(20);while(!P1_4);Delay(20);KeyNumber=13;}P1=0xFF;//全部置为高电平P1_2=0;//仅启动P1_2--即第二列 if(!P1_7){Delay(20);while(!P1_7);Delay(20);KeyNumber=2;}if(!P1_6){Delay(20);while(!P1_6);Delay(20);KeyNumber=6;}if(!P1_5){Delay(20);while(!P1_5);Delay(20);KeyNumber=10;}if(!P1_4){Delay(20);while(!P1_4);Delay(20);KeyNumber=14;}P1=0xFF;//全部置为高电平P1_1=0;//仅启动P1_1--即第三列 if(!P1_7){Delay(20);while(!P1_7);Delay(20);KeyNumber=3;}if(!P1_6){Delay(20);while(!P1_6);Delay(20);KeyNumber=7;}if(!P1_5){Delay(20);while(!P1_5);Delay(20);KeyNumber=11;}if(!P1_4){Delay(20);while(!P1_4);Delay(20);KeyNumber=15;}P1=0xFF;//全部置为高电平P1_0=0;//仅启动P1_0--即第四列if(!P1_7){Delay(20);while(!P1_7);Delay(20);KeyNumber=4;}if(!P1_6){Delay(20);while(!P1_6);Delay(20);KeyNumber=8;}if(!P1_5){Delay(20);while(!P1_5);Delay(20);KeyNumber=12;}if(!P1_4){Delay(20);while(!P1_4);Delay(20);KeyNumber=16;}return KeyNumber;}1.4.1矩阵键盘密码锁main函数:#include <REGX52.H>#include "Delay.h"#include "LCD1602.h"#include "MatrixKey.h"unsigned int KeyNumber;unsigned int PassWord,Count;//密码,位数void main(){LCD_Init();LCD_ShowString(1,1,"PassWord:");while(1){KeyNumber=MatrixKey();if(KeyNumber){if(KeyNumber<=10){//将10变成0,仅考虑0~9范围内if(Count<4){PassWord*=10;//每输入一位密码,当前密码左移一位 PassWord+=KeyNumber%10;//获取一位密码Count++;//计次}LCD_ShowNum(2,1,PassWord,4);//输出密码}if(KeyNumber==11){//清零Count=0;//清零次数PassWord=0;//清零密码LCD_ShowNum(2,1,PassWord,4);//更新显示}if(KeyNumber==12){//确认LCD_ShowString(1,12," ");if(PassWord==1976){LCD_ShowString(1,12,"OK");}else{LCD_ShowString(1,12,"ERROR");}//清零Count=0;PassWord=0;LCD_ShowNum(2,1,PassWord,4);//更新显示}}}}1.5定时器1.5.1按键控制LED流水灯模式TMOD:定时器寄存器:配置M1,M2为1 0-更改为16定时器模式0~65535:溢出时才进行中断判断每隔1us计数加一,总共定时时间65535us;赋初值64535-1000us(1ms)后计数器溢出,进行中断操作快捷生成定时器模块该函数未配置中断与中断优先级,且定时器时钟模式不需要定义定时器函数://1ms定时器void Timer0_Init(){//模式寄存器,高四位为计时器1,低四位为计时器2//高四位不变,低四位清零:10101100&11110000=10100000TMOD&=0xF0;//高四位不变,低四位赋1:10101100|00000001=10100001TMOD|=0x01;//控制寄存器;能单独对部分赋值TF0=0;//中断标志TR0=1;//运行控制位;1时运行T0进行计数//给定时器赋初值TH0=0xFC;//64535高八位TL0=0x18;//64535低八位//配置中断ET0=1;EA=1;//优先级选取PT0=0;}中断函数://定时器中断函数void Timer0_Rountine() interrupt 1{static unsigned int T0Count;//计数//复位TH0=0xFC;//64535高八位TL0=0x18;//64535低八位T0Count++;//每中断一次计数加一if(T0Count>=1000){//1ms中断一次,中断1000次则为1s //具体操作T0Count=0;P2_0=~P2_0;//闪烁}}主函数:#include <REGX52.H>#include <INTRINS.H>#include "Timer0.h"#include "Key.h"unsigned char KeyNumber,LEDMode;void main(){P2=0xFE;//点亮D1,给予循环移位初值Timer0_Init();//启用定时器while(1){KeyNumber=Key();if(KeyNumber){//按下独立按键if(KeyNumber==1){//S1为模式改变按键LEDMode++;if(LEDMode>=2){//仅有0|1两种模式LEDMode=0;}}}}}//中断操作void Timer0_Rountine() interrupt 1{ static unsigned int T0Count;//计数//给定时器赋初值复位TH0=0xFC;//64535高八位TL0=0x18;//64535低八位T0Count++;//每中断一次计数加一if(T0Count>=500){//0.5s操作一次T0Count=0;if(LEDMode){//模式1P2=_cror_(P2,1);//右移一位}else{//模式0P2=_crol_(P2,1);//左移一位}}}1.5.2定时器时钟:#include <REGX52.H>#include <INTRINS.H>#include "Timer0.h"#include "LCD1602.h"unsigned char Second,Minute,Hour;void main(){LCD_Init();//显示屏初始化LCD_ShowString(1,1,"Clock:");Timer0_Init();//启用定时器while(1){LCD_ShowNum(2,1,Hour,2);LCD_ShowString(2,3,":");LCD_ShowNum(2,4,Minute,2);LCD_ShowString(2,6,":");LCD_ShowNum(2,7,Second,2);}}//中断操作void Timer0_Rountine() interrupt 1{static unsigned int T0Count;//计数//给定时器赋初值复位TH0=0xFC;//64535高八位TL0=0x18;//64535低八位T0Count++;//每中断一次计数加一if(T0Count>=1000){//0.5s操作一次T0Count=0;Second++;if(Second==60){Minute++;Second=0;if(Minute==60){Hour++;Minute=0;if(Hour==25){Hour=Minute=Second=0;}}}}}1.6串口:1.6.1串口通信:配置波特率:1.6.2交互数据传输:#include <REGX52.H>//串口函数******************void UART_Init(){//配置串行控制寄存器,调整工作模式1SCON=0x50;//允许双向传输,REN置为1,配置使能//配置波特率选择位--需要配置定时器PCON|=0x80;//最高位置1,波特率加倍//定时器模式寄存器式//使用双八位模式(复位与计数分开)提高精度//清除定时器1模式位TMOD&=0x0F;//设定定时器1为八位自动重装方式TMOD|=0x20;//256溢出一次TL1=0xF4;//设定定时器初值TH1=0xF4;//设定定时器重装值ET1=0;//禁止定时器1中断TR1=1;//启动定时器1//使能中断EA=1;ES=1;}//发送函数void UART_SendByte(unsigned char Byte){SBUF=Byte;//发送数据到SBUF缓存器中即可进行传输//检测是否完成while(!TI);TI=0;}#ifndef __UART_H__#define __UART_H__/*串口函数输入:void输出:void功能:实现串口使用的初始化*/void UART_Init();/*串口发送函数输入:void输出:void功能:通过串口发送数据至接收端*/void UART_SendByte(unsigned char Byte);#endifmain:#include <REGX52.H>#include "Delay.h"#include "UART.h"void main(){UART_Init();while(1){}}//使能中断函数;发送/接收中断函数void UART_Routine() interrupt 4{if(RI==1){//限制仅为接收中断才进行后续操作P2=~SBUF;//外部设备传输数据存放在SBUF缓存器内 UART_SendByte(SBUF);//输出传入数据RI=0;}}1.7LED点阵屏:通过74HC595三个引脚控制八个LED 显示(新版板子是没有该八位LED 的)通过控制75HC595进行数据传输: #include <REGX52.H>//重新进行声明sbit RCK = P 3^5; //RCLKsbit SCK = P 3^6; //SRCLKsbit SER = P 3^4;//移位寄存器输入数据void _74HC595_WriteByte(unsigned char Byte){unsigned char i;for(i=0;i<8;i++){//从高位开始缓存数据SER=Byte&(0x80>>i);//非零置一0x80--10000000SCK=1;//赋予高电平进行移位SCK=0;//复位}RCK=1;//传输数据RCK=0;//复位}void main(){//初始化SCK=0;RCK=0;_74HC595_WriteByte(0xF0);while(1){}}1.7.1LED点阵屏显示动画:使用该软件进行数据读取MatrixLED_ShowColumn.c:#include <REGX52.H>#include "Delay.h"#include "MatrixLED_ShowColumn.h"//移位寄存器输入数据,控制段选void _74HC595_WriteByte(unsigned char Byte){unsigned char i;for(i=0;i<8;i++){//从高位开始缓存数据SER=Byte&(0x80>>i);//非零置一0x80--10000000SCK=1;//赋予高电平进行移位SCK=0;//复位}RCK=1;//传输数据RCK=0;//复位}//LED点阵屏void MatrixLED_ShowColumn(unsigned char Column,unsigned char Data){ _74HC595_WriteByte(Data);//段选MATRIX_LED_PORT=~(0x80>>Column);//位选0时出现压降,导通Delay(1);MATRIX_LED_PORT=0xFF;//位清零}//初始化void MatrixLED_Init(){SCK=0;RCK=0;}MatrixLED_ShowColumn.h:#ifndef _MATRIXLED_H__#define _MATRIXLED_H__//重新进行声明sbit RCK= P3^5;//RCLKsbit SCK= P3^6;//SRCLKsbit SER= P3^4;#define MATRIX_LED_PORT P0/*移位寄存器函数输入:Byte-点阵屏行数据输出:void功能:通过输入数据对LED点阵屏行(即位选)进行调整范围:0~7*/void _74HC595_WriteByte(unsigned char Byte);/*LED点阵屏函数输入:Column-位选 Data-段选输出:void功能:通过输入位选与段选实现LED点阵屏的动画演示*/void MatrixLED_ShowColumn(unsigned char Column,unsigned char Data);/*LED点阵屏初始化函数输入:void输出:void功能:对LED相关参数进行初始化*/void MatrixLED_Init();#endifmain.c:#include <REGX52.H>#include "Delay.h"#include "MatrixLED_ShowColumn.h"unsigned char code Animation[]={//存放在flash内存中,避免占用RAM内存0x00,0x40,0x20,0x1F,0x20,0x40,0x00,0x00,0x00,0x40,0x40,0x7F,0x40,0x40,0x00,0x00,0x00,0x7E,0x02,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x76,0x91,0x89,0x6E,0x00,0x00,0x00,0x00,0x7F,0x88,0x88,0x70,0x00,0x00,};void main(){//只要是局部变量的定义都要放在所在函数体内的第一行unsigned char j,Offset,Count;MatrixLED_Init();while(1){for(j=0;j<8;j++){MatrixLED_ShowColumn(j,Animation[j+Offset]);}Count++;if(Count>10){//扫描十遍偏移一次Count=0;Offset+=8;Delay(200);if(Offset>32){//防止溢出Offset=0;}}}}1.8DS1032定时时钟:从上到下依次存储不同的时间左边两列为其地址命令字第六位:1-RAM;0-CK,对时钟进行操作(有横线代表低电平有效)仅改变前七位,最后一位恒为1前一个字节是命令字,后一个是数据重新定义该三个端口1.8.1DS1302固定时钟主函数:#include <REGX52.H>#include "Delay.h"#include "DS1302.h"#include "LCD1602.h"void main(){LCD_Init();DS1302_Init();LCD_ShowString(1,1," - - ");LCD_ShowString(2,1," : : ");DS1302_SetTime();//设置时间//DS1302芯片内部自动会进行时间进位,不需要手动设置,只需要输入初始时间即可while(1){DS1302_ReadTime();//读入时间LCD_ShowNum(1,1,DS1302_Time[0],2);LCD_ShowNum(1,4,DS1302_Time[1],2);LCD_ShowNum(1,7,DS1302_Time[2],2);LCD_ShowNum(2,1,DS1302_Time[3],2);LCD_ShowNum(2,4,DS1302_Time[4],2);LCD_ShowNum(2,7,DS1302_Time[5],2);}}DS1302.c:#include <REGX52.H>#include "Delay.h"//重新定义端口名称,便于模块化集成sbit DS1302_SCLK=P3^6;sbit DS1302_IO=P3^4;sbit DS1302_CE=P3^5;#define DS1302_SECOND 0x80#define DS1302_MINUTE 0x82#define DS1302_HOUR 0x84#define DS1302_DATE 0x86#define DS1302_MONTH 0x88#define DS1302_DAY 0x8A#define DS1302_YEAR 0x8C#define DS1302_WP 0x8E//Year,Month,Day,Hour,Minute,Second,Weekdayunsigned char DS1302_Time[]={22,5,22,21,19,55,7};//DS1302初始化,将使能端置0,SCLK置0void DS1302_Init(void){DS1302_CE=0;DS1302_SCLK=0;}//写入操作void DS1302_WriteByte(unsigned char Command, unsigned char Data){ //写入预操作//Command的第零位赋予IO口,第零位是标志位,判断读/写//Command与Data都是通过上升沿进行判断,因此总共有16个脉冲unsigned char i;DS1302_CE=1;//进行Command判断for(i=0;i<8;i++){DS1302_IO=Command&(0x01<<i);//进行电平变化,产生上升沿与下降沿DS1302_SCLK=1;Delay(1);//一般需要增加延时,具体参考芯片手册DS1302_SCLK=0;}//进行数据写入for(i=0;i<8;i++){DS1302_IO=Data&(0x01<<i);DS1302_SCLK=1;Delay(1);DS1302_SCLK=0;}//写入末操作DS1302_CE=0;}unsigned char DS1302_ReadByte(unsigned char Command){//读入预操作unsigned char i;unsigned char Data=0x00;Command|=0x01;//此处将最低位,置成1,使输入的写Command变成读Command DS1302_CE=1;//读入的Command是上升沿,而Data是下降沿,因此总共有15个脉冲for(i=0;i<8;i++){DS1302_IO=Command&(0x01<<i);//调整位置确保脉冲与Data一致DS1302_SCLK=0;DS1302_SCLK=1;}//读入数据//IO口默认为0,因此输入的数据为1时,for(i=0;i<8;i++){DS1302_SCLK=1;DS1302_SCLK=0;if(DS1302_IO){Data|=(0x01<<i);}}//读入末操作DS1302_CE=0;DS1302_IO=0;return Data;}unsigned char ChangeToDec(unsigned char Number){return (Number/16*10+Number%16);}。
51单片机知识总结

51单片机知识总结51单片机是一种常见的微控制器,广泛应用于各种嵌入式系统。
以下是关于51单片机的知识总结:1. 概述:51单片机是指基于Intel的8051微控制器核的微控制器。
它具有40个引脚,采用CHMOS工艺,功耗低,可靠性强。
51单片机内部集成了数据存储器、程序存储器、定时器/计数器、串行通信接口等模块。
2. 结构特点:一个8位处理器。
具有布尔处理能力和位处理功能。
4k字节的ROM/EPROM,可进行在线编程和擦除。
256字节的RAM。
外部总线接口。
时钟和定时器模块。
3. 应用领域:工业自动化控制。
智能仪表和传感器接口。
家电控制(如空调、冰箱、洗衣机等)。
通信设备(如调制解调器、路由器等)。
汽车电子(如发动机控制、安全系统等)。
4. 开发环境:常用的51单片机开发环境有Keil、IAR Embedded Workbench等,这些开发环境支持C/C++语言编程,方便用户进行程序开发和调试。
5. 编程语言:常用的编程语言有汇编语言和C语言。
汇编语言是一种低级语言,可以直接控制硬件,但代码量大且可读性差;C语言则是一种高级语言,代码量小且易于读懂和维护,但在编程时需要了解一些硬件相关的知识。
6. 开发流程:系统需求分析:明确系统的功能需求和控制要求。
硬件电路设计:根据需求选择合适的单片机型号和外设器件,设计电路原理图和PCB板。
软件编程:使用开发环境编写程序代码,进行仿真和调试。
系统集成与测试:将硬件和软件集成在一起,进行系统测试和功能验证。
7. 注意事项:在应用51单片机时,需要注意单片机的电源电压范围、时钟频率选择、I/O口的使用和配置等问题,同时还要注意避免电磁干扰和过流过压等问题。
8. 未来发展:随着技术的发展,51单片机逐渐面临被淘汰的命运,但其在嵌入式系统中的地位仍然非常重要。
未来,随着物联网技术的发展,51单片机有望在智能家居、智能农业等领域得到更广泛的应用。
同时,随着技术的进步,51单片机的性能和功能也将得到进一步提升和完善。
51单片机知识基础

51单片机知识基础51单片机是一种非常常见的嵌入式系统开发平台,广泛应用于各个领域,如工业控制、智能家居、物联网等。
要想在嵌入式系统开发中熟练运用51单片机,我们首先需要了解它的基础知识。
本文将从51单片机的概念、特点、原理、编程语言等方面展开论述,以帮助读者全面掌握51单片机的基础知识。
第一部分:51单片机概述51单片机是指Intel公司研发的一种8位单片微控制器,意为“Intel 80系列单片机”。
它由CPU、内存、输入输出端口、定时器、串口等组成,具有较强的数据处理和控制能力。
作为一种非常成熟的单片机,51单片机以其稳定性、成本低、易于使用等特点,受到了广大嵌入式系统开发者的青睐。
第二部分:51单片机特点1. 8位架构:51单片机采用8位架构,即其CPU的位数为8位。
这使得51单片机非常适合于一些对计算能力要求不高的控制应用。
2. 强大的IO口:51单片机内置了大量的IO口,可以方便地与其他设备进行通信,实现各种输入输出功能。
此外,51单片机还支持中断功能,可以提高系统的响应速度。
3. 丰富的外设:51单片机内部集成了多个定时器、串口等外设,可用于实现各种功能,如定时、计数、通信等。
4. 低功耗设计:51单片机在设计时考虑到了功耗的问题,采取了一系列的低功耗技术,可以大大降低系统的能耗。
5. 软件支持:针对51单片机,有丰富的软件开发工具和开发库可供选择,如Keil C51、SDCC等,大大降低了开发的难度。
第三部分:51单片机工作原理51单片机的工作原理主要包括指令执行周期、数据通信、中断机制等。
1. 指令执行周期:51单片机通过时钟控制来执行指令。
每个指令执行周期由若干个机器周期组成,一个机器周期通常为12个时钟周期。
2. 数据通信:51单片机通过内部总线进行数据通信。
在执行指令时,需要从内存或寄存器中读取数据,对数据进行处理,并将处理结果写回内存或寄存器。
3. 中断机制:51单片机支持中断机制,可以在特定条件下触发中断请求,从而暂停当前的程序执行,转而执行中断服务程序。
51单片机知识点

51单片机知识点单片机(Microcontroller,简称MCU)是指集成了微处理器、存储器和各种输入输出接口功能于一体的芯片。
作为嵌入式系统的核心,单片机被广泛应用于各个领域,具有重要的意义。
本文将介绍51单片机的一些基础知识点。
一、51单片机概述51单片机是由Intel公司推出的一种8位单片机,采用Harvard结构,具有较高的性价比和广泛的应用。
它的内部包含了CPU、RAM、ROM、I/O接口等重要组成部分,同时支持多种外设接口,具备较强的可扩展性。
二、51单片机的特点1. 8位架构:51单片机采用的是8位的数据总线和内部寄存器,可以处理8位数据,适用于许多小型应用。
2. 存储器:51单片机内部包含了存储器单元,其中包括RAM和ROM。
RAM用于存储数据和临时变量,ROM用于存储程序代码。
3. I/O接口:51单片机提供了丰富的I/O接口,可以与各种外设进行通信和数据交换。
4. 定时器和计数器:51单片机内部集成了定时器和计数器,可用于计时、调度和产生精确的时间延迟。
5. 中断系统:51单片机支持中断功能,可以及时响应外部触发的事件,提高了系统的实时性和可靠性。
6. 低功耗设计:51单片机在设计上考虑了功耗优化,具有较低的工作电流和待机电流,适用于电池供电和节能应用。
三、51单片机的编程语言51单片机的编程语言主要有汇编语言和C语言两种。
汇编语言是直接操作单片机硬件的底层语言,具有高效性和灵活性,但难以学习和维护。
C语言是一种高级语言,可以通过编译器将C语言代码转换为单片机可执行的机器语言,更容易编写和调试。
四、51单片机的应用领域51单片机广泛应用于各个领域,如家电控制、电子仪器、通信设备、汽车电子、工业自动化等。
它具有价格低廉、易于使用、可靠性高等优点,在小型控制系统中得到了广泛应用。
五、51单片机的开发工具51单片机的开发工具主要包括开发板、编译器、调试器等。
开发板是一个硬件平台,提供了丰富的接口和外设,用于连接和测试电路。
MCS51单片机基础知识

MCS-51单片机的基本结构XTAL1XTAL2VCC VSSMCS-51单片机的基本结构:1、微处理器CPU :为8位的CPU ,且内含一个1位CPU (布尔处理器),不仅可以处理字节数据,还可以进行位变量的处理。
2、内部数据存储器(RAM ):128字节片内RAM 。
(8052系列为256字节)3、内部程序存储器(ROM/EPROM/):8031无此器件,8051为4KROM ,8751为4KEPROM 。
4、定时器/计数器:内含2个16位定时/计数器,具有四种工作方式。
5、串行口:1个全双工的串行口,具有四种工作方式。
6、中断控制系统:具有5个中断源,2级中断优先权。
7、P0、P1、P2、P3:为4个并行8位I/O 口。
8、特殊功能寄存器(SFR ):共有21个,用于对片内各功能模块进行管理、控制、监视。
实际上是一些控制寄存器和状态寄存器,是一个特殊功能的RAM 区。
12346758910111213144039383735343633323130292827P1.0P1.1P1.4P1.3P1.2P1.5RST/VPD P1.7P1.6RXD P3.0TXD P3.1T0 P3.4T1 P3.5Vcc P0.0P0.3P0.2P0.1P0.4P0.6P0.5P0.7P2.7PSEN P2.6EA/VPP ALE/PROG 151617181920WR P3.6RD P3.7XTAL1XTAL2VSS262524232121P2.5P2.1P2.2P2.0P2.4P2.3INTO P3.2INT1 P3.389C511、电源、时钟电路VCC(40脚)—+5V电源VSS(20脚)—地XTAL1(19脚)—芯片内部振荡电路(单级反相放大器)输入端。
XTAL2(18脚)—芯片内部振荡电路(单级反相放大器)输出端。
MCS-51的时钟可由内部方式或外部方式产生。
1)内时钟方式利用芯片内部的振荡电路,在XTAL1、XTAL2的引脚上外接定时元件,内部振荡器便能产生自激振荡,用示波器便可以观察到XTAL2输入的正弦波,定时元件可以采用石英晶体和电容组成的并联谐振电路,连接方法如图2.2(a)所示。
51单片机基础知识

51单片机基础知识51单片机是一种广泛应用于嵌入式系统中的微控制器,它具有体积小、功耗低、易于编程等优点,因此在各种电子设备中得到了广泛的应用。
在学习51单片机之前,我们需要掌握一些基础知识。
我们需要了解51单片机的基本结构。
51单片机由CPU、存储器、输入输出端口、定时器、串口等组成。
其中,CPU是单片机的核心部件,它负责执行程序指令;存储器用于存储程序和数据;输入输出端口用于与外部设备进行数据交互;定时器用于计时和延时;串口用于与其他设备进行通信。
我们需要了解51单片机的编程语言。
51单片机支持多种编程语言,如汇编语言、C语言等。
汇编语言是一种低级语言,它直接操作CPU指令,具有高效性和灵活性,但编写难度较大。
C语言是一种高级语言,它具有易于学习、编写简单等优点,但执行效率较低。
我们还需要了解51单片机的编程工具。
51单片机的编程工具主要有Keil、IAR等。
Keil是一种常用的集成开发环境,它具有编译、调试、下载等功能,可以方便地进行单片机程序开发。
IAR也是一种常用的开发工具,它具有高效的编译器和调试器,可以提高程序的执行效率。
我们需要了解51单片机的应用领域。
51单片机广泛应用于各种电子设备中,如家电、汽车电子、医疗设备等。
在家电中,51单片机可以控制电器的开关、温度、湿度等参数;在汽车电子中,51单片机可以控制车载音响、空调、车灯等设备;在医疗设备中,51单片机可以控制医疗仪器的运行和数据采集等。
学习51单片机需要掌握基本结构、编程语言、编程工具和应用领域等基础知识。
只有掌握了这些知识,才能更好地进行单片机程序开发和应用。
51单片机的基础知识

MCS-51 单 片 机 基 础
EA 控 制 RST N ALE 和 指 寄 定 存 时 器 OSC
RAM
P0口锁存器
P2口锁存器
EPROM/ROM
程序地址 寄存器 栈指示器SP 缓冲器 B寄存器 TMP2 TMP1 PC值 递增器 ALU 口 PSW 器 PC
ACC
DPTR
P1口锁存器
P3口锁存器
T1
MCS-51 单 片 机 基 础
定时/计数器 定时 计数器
并行接口
串行接口
中断系统
TXD RXD
INT0 INT1
P0 P1 P2 P3
MCS-51单片机的基本结构 单片机的基本结构
湘潭大学职业技术学院 李志斌
P0.0 ~ P0.7
P2.0 ~ P2.7
P0口驱动器
P2口驱动器
RAM 地址 寄存器
湘潭大学职业技术学院 李志斌
MCS-51
湘潭大学职业技术学院
李志斌
P3口各位的第二功能
P3口引脚 口引脚 P3.0 P3.1 P3.2 P3.3 P3.4 P3.5 P3.6 P3.7 第二功能 RXD(串行口输入端) (串行口输入端) TXD(串行口输出端) (串行口输出端) INT0(外部中断 输入 外部中断0输入 外部中断 输入) INT1(外部中断 输入 外部中断1输入 外部中断 输入) T0(定时器0外部输入) (定时器 外部输入) 外部输入 T1(定时器 外部输入) 外部输入) (定时器1外部输入 WR(外部数据存储器写脉冲输出) (外部数据存储器写脉冲输出) RD(外部数据存储器读脉冲输出) (外部数据存储器读脉冲输出)
P1口驱动器
P3口驱动器
P1.0 ~ P1.7
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机基本知识汇总
51单片机是一种常见的微控制器,广泛应用于各种电子设备中。
本文将对51单片机的基本知识进行汇总,包括其特点、应用领域、工作原理以及相关开发工具等内容。
一、51单片机的特点
51单片机是一种8位微控制器,具有体积小、功耗低、价格便宜等特点。
它采用哈佛结构,具有较好的实时性能和嵌入式系统特性。
此外,51单片机还具备较强的扩展性,可通过外部器件和接口扩展其功能。
二、51单片机的应用领域
由于其成本低、易学易用的特点,51单片机在各种电子设备中被广泛应用。
比如家用电器、汽车电子、工控设备、通信设备等领域。
在家用电器中,51单片机可以用于控制空调、洗衣机、电视等设备的运行;在汽车电子方面,它可以用于控制车载音响、车灯等;在工控设备中,51单片机可用于控制机械手臂、传感器等;在通信设备方面,它可以用于控制无线路由器、手机等。
三、51单片机的工作原理
51单片机的工作原理可以简单概括为:通过外部输入设备(如按键、传感器)获取输入信号,经过A/D转换后输入到单片机内部;单片机根据预先设定的程序进行运算、判断和控制,然后通过输出端口
控制外部输出设备(如LED灯、电机)工作。
整个过程是通过时钟信号进行同步控制的。
四、51单片机的开发工具
为了方便开发人员进行程序设计和调试,51单片机有一系列的开发工具可供选择。
常用的开发工具有Keil C51、Proteus、IAR等。
Keil C51是一种集成开发环境,提供了编译、调试、仿真等功能,可以方便地编写和调试51单片机的程序。
Proteus是一种虚拟电子电路设计与仿真软件,可用于模拟51单片机的工作过程。
IAR是一种集成开发环境,也是一种常用的编译器,适用于多种单片机开发。
总结:
本文对51单片机的基本知识进行了汇总,包括其特点、应用领域、工作原理以及相关开发工具等内容。
51单片机作为一种常见的微控制器,具有广泛的应用前景。
掌握了51单片机的基本知识,可以更好地应用于各种电子设备的开发与控制。
希望本文能为读者了解51单片机提供一些参考,并对其感兴趣的读者提供一些启示。