嵌入式CANopen协议
CANopen从站协议在stm32分析和说明

1 CANopen是一种架构在控制局域网路(Control Area Network, CAN)上的高层通讯协定,其协议在嵌入式系统及单片机上广泛使用,是工业控制常用到的一种现场总线。
依靠CANopen协议集的支持,可以对不同的从站设备通过总线进行配置和系统重构。
相信在不久的将来随着国内对CANopen协议的研究深入,CANopen协议会在各个领域有广泛的应用。
CANopen 是OSI模型中的网络层以上(包括网络层)的协定。
CANopen 支持网络管理、设备监控及节点间的通讯,其中包括一个简易的传输层,可处理资料的传送。
数据的传输和接收都基于CAN总线。
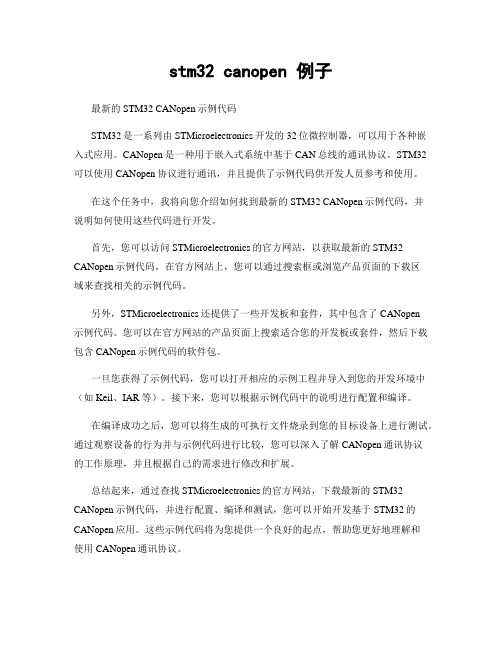
如图1,通常多个从站设备靠CANopen网络传输数据给一个CANopen 主站设备。
CANopen需要有对象字典,SDO(服务数据对象)处理功能,PDO(过程数据对象)处理功能,定时器,NMT(网络管理)处理功能等。
2 CANopen对象字典介绍及设计对象字典(od:object dictionary)是CANopen协议的核心。
对象字典(od:object dictionary)是一个有序的对象组;每个对象采用一个16位的索引值来寻址,为了允许访问数据结构中的单个元素,同时定义了一个8位的子索引。
通过接收主站发送的SDO(服务数据对象)报文,可以设置从站的对象字典,主要对象字典请参见表1。
从站在做事件处理时通常会读取对象字典,根据对象字典里的数据进行事件处理。
譬如从站的1017索引是记录从站发送心跳包的时间间隔。
当从站程序运行时并且从站是准备、停止、运行状态时,程序会查找1017索引的0号子索引里的数据进行处理。
如果里面有数据的话(假设数据为2000),程序则会根据数据所设置的时间通过定时器判断来每2000毫秒发送心跳包。
表1 从站主要对象字典介绍索引:对象16 位元的位址。
数据的类型:一个代表对象的类型,可以是阵列、纪录或只是一个变量。
类型:变量的类型。
stm32 canopen 例子
stm32 canopen 例子最新的STM32 CANopen示例代码STM32是一系列由STMicroelectronics开发的32位微控制器,可以用于各种嵌入式应用。
CANopen是一种用于嵌入式系统中基于CAN总线的通讯协议。
STM32可以使用CANopen协议进行通讯,并且提供了示例代码供开发人员参考和使用。
在这个任务中,我将向您介绍如何找到最新的STM32 CANopen示例代码,并说明如何使用这些代码进行开发。
首先,您可以访问STMicroelectronics的官方网站,以获取最新的STM32 CANopen示例代码。
在官方网站上,您可以通过搜索框或浏览产品页面的下载区域来查找相关的示例代码。
另外,STMicroelectronics还提供了一些开发板和套件,其中包含了CANopen示例代码。
您可以在官方网站的产品页面上搜索适合您的开发板或套件,然后下载包含CANopen示例代码的软件包。
一旦您获得了示例代码,您可以打开相应的示例工程并导入到您的开发环境中(如Keil、IAR等)。
接下来,您可以根据示例代码中的说明进行配置和编译。
在编译成功之后,您可以将生成的可执行文件烧录到您的目标设备上进行测试。
通过观察设备的行为并与示例代码进行比较,您可以深入了解CANopen通讯协议的工作原理,并且根据自己的需求进行修改和扩展。
总结起来,通过查找STMicroelectronics的官方网站,下载最新的STM32 CANopen示例代码,并进行配置、编译和测试,您可以开始开发基于STM32的CANopen应用。
这些示例代码将为您提供一个良好的起点,帮助您更好地理解和使用CANopen通讯协议。
CAN总线的浅析CANopen协议
CAN总线的浅析CANopen协议在设计嵌入式系统,尤其是分布式嵌入式系统时,解决好系统各单元间可靠、有效的通信是系统设计成败的关键,对实时性和安全可靠性要求高的网络而言就更是如此。
解决这一问题有多种方案,如RS232/485串行总线、CAN、ProfitBus、FF、WorldFIP、LonWorks等各类型的现场总线,还有嵌入式以太网等。
其中,尽管RS485串行总线协议的性能不高,但由于其在硬件成本以及开发简便性上的巨大优势,目前仍然是国内广泛的总线应用。
随着嵌入式系统应用的发展,RS485性能上的不足逐渐显露出来,已经不能满足设计一个高性能、高实时性系统的要求。
尽管还需要实践的证明,但笔者经过多年的观察和实践,感觉到CAN总线是其中最有希望成功的。
选择CAN总线实现通信的原因选择CAN总线作为最佳候选者,主要是基于以下几方面原因:CAN串行总线具有高性能CAN的传输距离可以达到10公里;通信速率最高可达1Mbps;具有完善的错误检测机制;采用“多重访问冲突仲裁”机制的帧传输方式,可保证不丢失信息;每一帧中最多可以传输8个字节数据,可提供很高的实时性等等。
性能上的优势保证了CAN可以应用在很多的领域,在汽车工业、船舶运输、机械控制、工厂自动化、楼宇自动化等都可以看到CAN的应用。
CAN在硬件成本上很具优势除了性能外,和其它现场总线相比,CAN总线在硬件成本上也有很大优势。
从硬件芯片上来说,智能节点要收发信息需要一个CAN控制器和一个CAN收发器。
经过20多年的发展,CAN已经获得了国际上各大半导体制造商的大力支持,据CAN最主要的推广组织CIA(自动化CAN)统计,目前已经有20余种CAN控制器和收发器可供选择,片内集成CAN控制器的单片机更多达100余种。
CAN在开发成本上的优势也很明显目前,从广泛应用的8位/16位单片机,到DSP和32位的PowerPC、ARM等嵌入式处理器,均在芯片内部含有CAN总线硬件接口单元。
canopen参数

canopen参数摘要:一、CanOpen协议简介二、CanOpen参数的分类与作用1.通信参数2.节点识别参数3.报文传输参数4.错误处理与诊断参数5.电源管理参数三、CanOpen参数的配置方法四、CanOpen参数在实际应用中的案例分析五、总结与展望正文:一、CanOpen协议简介CanOpen是一种基于CAN总线的通信协议,主要用于工业自动化和嵌入式系统中。
它是一种高性能、高可靠性的通信协议,能够实现设备间的高效、稳定、安全的数据传输。
CanOpen协议在全球范围内得到了广泛的应用,已经成为工业自动化领域的通信标准之一。
二、CanOpen参数的分类与作用1.通信参数:主要包括波特率、数据位、停止位、校验位等,这些参数决定了通信的速率、数据格式以及是否进行奇偶校验等。
2.节点识别参数:包括设备ID、子地址等,用于标识不同的设备节点,实现设备间的差异化。
3.报文传输参数:包括报文长度、发送间隔、发送次数等,用于控制报文的传输速率、传输次数等。
4.错误处理与诊断参数:包括错误检测与处理方式、诊断报文周期等,用于实现故障诊断与处理。
5.电源管理参数:包括电源模式、电源电压范围等,用于确保设备在不同电源环境下的稳定运行。
三、CanOpen参数的配置方法配置CanOpen参数时,需要根据实际应用需求,合理设置各个参数。
配置过程主要包括以下几个步骤:1.确定通信参数:根据通信速率、波特率等需求,设置相应的通信参数。
2.设置节点识别参数:根据设备ID、子地址等需求,设置相应的节点识别参数。
3.设置报文传输参数:根据通信需求,设置报文长度、发送间隔、发送次数等。
4.设置错误处理与诊断参数:根据故障诊断需求,设置错误检测与处理方式、诊断报文周期等。
5.设置电源管理参数:根据电源需求,设置电源模式、电源电压范围等。
四、CanOpen参数在实际应用中的案例分析以一个智能工厂为例,生产线上的设备通过CanOpen协议进行通信。
stm32 canopen 例子

stm32 canopen 例子摘要:1.引言2.STM32微控制器简介3.CANopen协议简介4.STM32 CANopen例子概述5.硬件设计6.软件设计7.总结正文:1.引言随着工业自动化和物联网技术的不断发展,嵌入式系统在各领域得到了广泛应用。
其中,STM32系列微控制器凭借出色的性能和低功耗特点,成为了嵌入式领域的热门选择。
CANopen协议作为一种基于CAN总线的通信协议,具有良好的实时性和可靠性,在工业自动化领域有着广泛的应用。
本文将介绍一个基于STM32的CANopen例子,以供参考。
2.STM32微控制器简介STM32系列微控制器是意法半导体公司推出的一款基于ARM Cortex-M 内核的32位闪存微控制器。
它具有高性能、低功耗、多功能、易扩展等特点,广泛应用于嵌入式系统领域。
3.CANopen协议简介CANopen协议是基于CAN总线的通信协议,由德国的Robert Bosch GmbH公司开发。
它是一种用于实时控制的开放式串行通信协议,具有多主控制结构、高可靠性、实时性好等特点。
CANopen协议在工业自动化领域得到了广泛应用,特别是在工业控制器和现场设备之间的通信。
4.STM32 CANopen例子概述本文将以一个简单的STM32 CANopen例子为例,介绍如何实现基于STM32的CANopen通信。
该例子采用STM32F103C8T6微控制器,具备两个CAN通道,分别用于发送和接收数据。
硬件方面,通过扩展CAN收发器及相关的外围器件,实现CANopen通信;软件方面,编写相应的程序实现CANopen协议的帧传输、数据处理等功能。
5.硬件设计硬件设计主要包括微控制器、CAN收发器、外围器件等的选型和连接。
首先,选用STM32F103C8T6微控制器作为核心控制器,通过SPI接口与CAN 收发器(如TJA1020)进行通信。
其次,根据需要选择其他外围器件,如电源模块、晶振模块、复位模块等。
一文了解嵌入式工程师常用的CAN总线协议

一文了解嵌入式工程师常用的CAN总线协议信息来源于网络很难找到一篇能够适合初学者CAN总线原理的文章,因此本着通俗易懂的原则编写此文。
本文说的CAN即是一种总线,也是一种协议。
因此,我们常听见CAN总线,也常听见CAN协议。
CAN协议和CANOpen协议是两套不同的协议。
从软硬件层次来划分,CAN协议属于硬件协议,而CANOpen属于软件协议。
什么是CAN总线?CAN总线应用于汽车,实现电子控制器和传感器之间的通信l 高可靠性、低成本的通信协议。
l 最初由Robert Bosch于1986年开发。
l 主要应用于汽车、卡车、拖拉机、工业机器人。
想象一下,一辆汽车就像一个人:Ø CAN总线是神经系统,使身体各部分之间的通信得以实现。
Ø ECU通过CAN总线连接,该总线相当于一个中央网络系统。
什么是ECU?l 在汽车CAN总线系统中,ECUs可以是发动机控制单元、安全气囊或音频系统。
l 一辆现代汽车最多可以有70辆ECUs。
CAN总线5大特性l 低成本:ECUs通过单个CAN接口进行通信,布线成本低。
l 高集成:CAN总线系统允许在所有ECUs上进行集中错误诊断和配置。
l 可靠性:该系统对子系统的故障和电磁干扰具有很强的鲁棒性,是汽车控制系统的理想选择。
l 高效率:可以通过id对消息进行优先级排序,以便最高优先级的id不被中断。
l 灵活性:每个ECU包含一个用于CAN总线收发芯片,随意添加CAN总线节点。
CAN总线发展史l 未出现前:汽车ECUs依靠越来越复杂的点对点布线。
l 1986年:Bosch公司开发了CAN总线协议作为汽车电子解决方案,并在SAE大会上发布。
l 1991年:Bosch公司发布了CAN2.0,包涵CAN 2.0A (11 位) 和CAN 2.0B (29 位)。
l 1993年:CAN总线列入标准(ISO 11898)。
l 2012年:Bosch公司发布了CAN FD 1.0l 今天:几乎每一辆汽车都有CAN总线系统,它广泛应用于卡车、公共汽车、工业车辆、船舶、飞机和工业自动化。
stm32 canopen 例子
stm32 canopen 例子摘要:1.STM32 和CANopen 简介2.STM32 CANopen 的优点3.STM32 CANopen 的实现方法4.STM32 CANopen 的例子5.总结正文:1.STM32 和CANopen 简介STM32 是一种基于ARM Cortex-M 内核的微控制器,广泛应用于各种嵌入式系统中,如机器人、智能家居和自动控制等领域。
CANopen 是一种用于实时控制的通信协议,特别适用于工业自动化领域。
2.STM32 CANopen 的优点STM32 CANopen 具有许多优点,如高可靠性、实时性和灵活性。
CANopen 协议可以实现多主控制器的通信,使得系统更加稳定。
此外,CANopen 还具有丰富的错误处理机制,可以保证通信的可靠性。
3.STM32 CANopen 的实现方法要实现STM32 CANopen,需要先配置STM32 的CAN 控制器,包括设置工作模式、时钟源和滤波器等参数。
然后,需要编写CANopen 协议的报文,包括标识符、数据长度和校验码等。
最后,通过CAN 控制器发送和接收报文,实现实时控制。
4.STM32 CANopen 的例子以下是一个简单的STM32 CANopen 例子:假设有一个机器人系统,由一个主控制器和两个从控制器组成。
主控制器通过CANopen 协议发送控制命令,如移动和旋转等,从控制器接收命令并执行相应的动作。
通过这种方式,可以实现对机器人系统的实时控制。
5.总结STM32 CANopen 是一种强大的实时控制方案,可以应用于各种嵌入式系统中。
通过配置STM32 的CAN 控制器和编写CANopen 协议的报文,可以实现实时控制和通信。
嵌入式网络Canopen协议
由于其高可靠性和实时性的特点,CAN总线能够满足系统高性能的要求,已经深入到各个行业,例如专业车辆、工业控制、医辽器械、海事应用等。
CAN的标准协议 CAN2.0协议和国际标准 ISO11898是设计 CAN 应用系统的基本依据,但它们只是定义了物理层和数据链路层,没有对应用层进一步规范,本身并不完善,需要一个更开放的、标准化的高层协议来定义 CAN报文中的标识符和字节数据。
在此背景下,由 CiA(CANin Automation)组织监督开发了CANOpen高层协议。
在 2002年,已经形成欧洲标准 EN50325-4。
CANOpen的最大优点之一就是实现较为简单。
CANOpen协议是基于 CAN串行总线系统和应用层 CAL的高层协议,也是一种针对于行业的标准化的协议。
CANOpen协议为分布式控制及嵌入式系统的应用提供了必要的实现方法,主要提供:(1)不同 CAN设备间的互操作性、互换性。
(2)标准化、统一的系统通讯模式。
(3)设备描述方式和网络功能。
(4)网络节点功能的任意扩展。
CANOpen协议以通讯规范 CiA DS-301为基础,规定了一系列的设备规范,如 CiA DSP-401,CiA DSP-404等,从而提供了配置通讯参数和数据的方王俊波:博士研究生本工作得到国家自然科学基金重点项目(60334010),国家自然科学基金项目(60474047)高等学校博士学科点专项基金项目(20030561013)以及广东省自然科学基金项目(31406)的资助法,规定了设备间的通讯及特定设备间的特定行为(如数字 I/O、模拟 I/O、RS485通讯等),并定义了标准化的应用对象、基本功能以及网络功能。
CANOpen协议采用对象字典(OD)、电子数据文档(EDS)等一系列概念来描述设备和协议的相关信息,还规定了服务数据对象(SDO)、过程数据对象 PDO、网络管理等多种通讯机制。
在本文中,主要是对对象字典、服务数据对象(SDO)、过程数据对象(PDO)进行了简要的分析。
CANopen协议在嵌入式系统中的应用研究的开题报告
CANopen协议在嵌入式系统中的应用研究的开题报告一、研究背景CANopen是一种在Controller Area Network(CAN)总线上使用的通信协议。
它的主要特点包括高度的互操作性和可靠性,以及良好的实时性能。
CANopen在许多领域中得到了广泛应用,特别是在工业自动化和控制系统中。
随着嵌入式系统应用领域的不断扩大,越来越多的工程师开始选择CANopen作为嵌入式系统的通信协议。
CANopen在嵌入式系统中的应用涉及到许多方面,包括网络配置、数据传输、节点触发等。
因此,CANopen的应用研究对于提高嵌入式系统的性能和可靠性显得十分重要。
二、研究内容本研究将通过以下几个方面来深入探讨CANopen协议在嵌入式系统中的应用:1. CANopen协议概述本部分将介绍CANopen协议的基本概念和特性。
我们将关注其网络配置、通信方式和数据格式等方面的细节,以便更好地理解CANopen协议在嵌入式系统中的应用。
2. CANopen协议在嵌入式系统中的通信实现本部分将介绍如何在嵌入式系统中实现CANopen通信协议。
讲述CANopen通信的帧格式、报文的发送和接收、CANopen节点的硬件和软件实现以及网络配置方案等。
3. 基于CANopen的嵌入式系统控制策略本部分将介绍如何将CANopen协议应用于嵌入式系统的控制策略中。
主要包括节点触发机制、CAN ID的分配、节点状态机等内容。
4. CANopen协议在嵌入式系统中的应用案例分析本部分将基于实际的应用案例,分析CANopen协议在嵌入式系统中的应用场景。
重点将放在如何运用CANopen协议来实现数据通信和系统控制等方面。
我们将阐述CANopen协议在提高嵌入式系统实时性、可靠性和安全性方面的应用优势。
三、预期成果通过本研究,我们希望能够得出以下成果:1. 全面深入地了解CANopen协议在嵌入式系统中的应用场景。
2. 掌握在嵌入式系统中实现CANopen通信的方法。
嵌入式CANopen下位系统设计
嵌入式CANopen下位系统设计CANopen是开放的总线技术,广泛应用于自动化生产各个领域,目前国内CANopen研究滞后,与国内的工业现场网络化进程发展需求不符,本文的研究就是在这样的背景下,开发具有通用特性的CANopen从站模块。
在对CANopen 协议研究的基础上,提出了基于STM32的嵌入式从站设计方案,并描述了其硬件与软件的架构。
标签:CANopen;CANopen从站;嵌入式引言CANopen是建立在CAN总线的应用层协议,CAN总线是一种架构开放、广播式的新一代网络通信协议,是针对汽车电子系统中的数据交换而开发的控制局域网协议。
由于其低成本、高可靠性、高传输速度原因,在工业控制领域得到广泛应用。
CAN接口芯片定义物理层和数据链路层,由于系统使用STM32作为系统主控制芯片,内部集成CAN接口芯片,在使用时接上CAN收发器即可。
CAN网络通信协议仅可以数据发送、接收、错误处理等底层数据传输问题,本身并不完整,对于应用层没有规定相应的解析协议。
为了提高CAN总线效率,实现更加复杂、快速、标准化的CAN通信协议,即CANopen协议。
CANopen是在CAL基础上开发的,使用了CAL通讯和服务协议子集,提供了分布式控制系统的一种实现方案。
CAL提供了所有的网络管理服务和报文传送协议,但没有定义CMS对象的内容或正在通讯的对象的类型(只定义How,没有定义What)。
CANopen在保证网络节点互用性的同时允许节点的功能随意扩展。
CANopen的核心概念是设备的对象字典,实现网络管理报文NMT、数据对象SDO、过程数据对象PDO预定义报文或者特殊功能对象核心报文。
1 CANopen从站模块设计本文中CANopen从站模块是采用ST公司的STM32运行在?COS II上来实现与主站CAN通讯,并具备对CANopen协议报文分析和打包的功能得以实现与主站之间的数据传输和处理。
主站方面,应用高级应用程序开发软件编制具备CANopen接口的人机交互界面,使用测试工具CANalyst-II 来实现主站的传输和调试。
GCAN-305 嵌入式CanOpen(从站)转Uart 用户手册

GCAN-305嵌入式CANopen(从站)转UART用户手册文档版本:V3.02 (2015/8/11)修订历史版本日期原因V1.00 2013/6/16 创建文档V2.01 2013/12/20 修正设备工作参数V3.01 2014/10/22 添加部分参数V3.02 2015/8/11 修正部分参数目录1. 功能简介31.1 功能概述31.2 性能特点31.3 静态参数41.4 典型应用52. 设备安装52.1 系统连接结构52.2 模块接口定义63. 设备使用73.1 GCAN-305配套评估板73.2 模块状态转换83.3 系统状态指示灯93.4 GCAN-305节点ID与CAN总线波特率94. GCAN-305中使用CANopen协议(DS301)114.1 GCAN-305预定义连接114.2 GCAN-305操作135. GCAN-305串口操作275.1 串口通信协议275.2 GCAN-305操作命令295.3 GCAN-305串口操作错误响应45附录A:CANopen协议简介46附录B:串口可操作对象字典列表53附录C:GCAN-305对象字典55销售与服务错误!未定义书签。
1. 功能简介1.1 功能概述GCAN-305是广成科技有限公司开发的嵌入式CANopen从站通信转换模块。
该模块内部已经集成了CANopen从站协议栈代码,不需要用户进行二次开发。
协议栈遵循CANopen协议描述文档DS301、DS302、DS303以及DS305标准。
在默认情况下,CANopen从站启用预定义连接,并支持参数存储。
GCAN-305模块提供一路CAN接口,通过该接口可以与CANopen网络进行连接。
另外GCAN-305提供两个UART接口——一个通信UART接口(通信波特率为1200~115200bps),一个调试UART接口(固定波特率为115200bps)。
GCAN-305模块适用于任何具有串口通信能力的系统,通过搭载该模块,用户现有的串口通信设备可以以最快的速度拥有CANopen通信能力,抢占市场先机。
CANopen协议

CANopen协议协议名称:CANopen协议一、介绍CANopen协议是一种基于CAN总线的通信协议,用于在工业自动化领域中实现设备之间的通信。
该协议定义了一套标准的通信对象和通信机制,使得不同厂家的设备可以相互交互和通信,实现数据的传输和控制。
二、协议结构CANopen协议由以下几个主要组成部分构成:1. 网络管理(NMT):负责网络的初始化、启动和停止,以及节点的管理和配置。
2. 数据通信(SDO):用于节点之间的数据传输,支持读取和写入操作。
3. 远程过程调用(RPC):允许节点之间进行远程过程调用,实现对远程节点的控制和操作。
4. 紧急消息(EMCY):用于传输设备故障和错误信息。
5. 时间同步(SYNC):用于同步网络中的各个节点的时间。
6. 节点配置(NMT配置):用于配置和管理节点的参数和功能。
7. 心跳(Heartbeat):用于监测节点的状态和活动性。
三、通信对象CANopen协议定义了一系列的通信对象,包括以下几种主要类型:1. 输入和输出(I/O):用于传输数字量和模拟量数据。
2. 字典对象(Dictionary Object):用于存储和传输设备的参数和配置信息。
3. 状态机(State Machine):用于控制设备的状态和行为。
4. 网络管理(NMT):用于管理和控制网络中的节点。
5. 紧急消息(EMCY):用于传输设备故障和错误信息。
6. 时间戳(Timestamp):用于记录事件的发生时间。
四、协议通信机制CANopen协议采用基于事件驱动的通信机制,使用COB(Communication Object Identifier)来标识和区分不同的通信对象。
通信对象可以通过SDO(Service Data Object)进行读取和写入操作,也可以通过RPC(Remote Procedure Call)进行远程过程调用。
1. SDO(Service Data Object):SDO用于节点之间的数据传输,支持读取和写入操作。
嵌入式CANopen协议转换模块——XGate-COP10
嵌入式CANopen协议转换模块——XGate-COP101 引言在上期文章中我们了解了CANopen从站设备的开发步骤,本期文章中我们将介绍一款嵌入式CANopen协议转换模块。
CANopen协议作为CAN总线的应用层协议,拥有复杂的网络管理(Network Management)、实时过程数据对象(Process Data Object)、服务数据对象(Service Data Object)、预定义连接和特殊功能对象等基本功能,另外CANopen协议还定义了指示灯规范、通信安全架构、在线配置、EDS文件规范、标准设备规范等一系列协议规范。
因此开发基于CANopen协议的设备有着非常高的难度以及较长的开发周期。
2 XGate-COP10简介XGate-COP10是广州致远电子有限公司开发的一款嵌入式CANopen协议转换模块,转换为UART接口,支持CANopen标准协议DS301、DS302、DS303、DS305。
XGate-COP10为CANopen从站协议转换模块,其内部已经集成了CANopen从站协议栈代码,不需要二次开发,可快速方便地使现有设备具有CANopen通信能力。
该模块具有如下所示的功能特点:(1)网络管理服务对象(NMT:Boot up, Node Guarding/Life guarding,Heartbeat Producer);(2)过程数据对象(TPDO与RPDO);(3)服务数据对象(SDO服务器);(4)紧急报文对象(Emergency);(5)同步报文对象(Sync);(6)网络配置对象(LSS从站);(7)串口通信能力(UART);(8)96 B的输入输出数据缓冲(I/O);(9)CAN总线支持5 kb/s~1 Mb/s的波特率;(10)体积小,18 mm×31 mm(DIP24封装)。
XGate-COP10从站具有高实时性,并可以支持多达12个RPDO和TPDO过程数据传输,适用于各种干扰强、实时性要求高的场合,小巧的体积适用于嵌入到各种电路板中,在用户系统中的结构。
课题_嵌入式网络Canopen协议

嵌入式网络Canopen协议1 引言CANopen是一种架构在控制局域网路(Control Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定常在嵌入式系统中使用,也是工业控制常用到的一种现场总线。
CANopen 实作了OSI模型中的网络层以上(包括网络层)的协定。
CANopen 标准包括寻址方案、数个小的通讯子协定及由设备子协定所定义的应用层。
CANopen 支援网络管理、设备监控及节点间的通讯,其中包括一个简易的传输层,可处理资料的分段传送及其组合。
一般而言资料链结层及实体层会用CAN来实作。
除了CANopen 外,也有其他的通讯协定(如EtherCA T)实作CANopen 的设备子协定。
基本的CANopen 设备及通讯子协定定义在CAN in Automation (CiA)draft standard 301. 中。
针对个别设备的子协定以CiA 301 为基础再进行扩充。
如针对I/O 模组的CiA401 及针对运动控制的CiA402.2 TinyARM简介TinyARM模块内置了CANopen从站协议,为用户灵活快速设计CANopen从站,构建符合国际标准的工业现场总线及分布式网络提供了更多、更好的选择。
TinyARM模块外观如图1所示。
TinyARM CANopen从站模块提供了网络管理(NMT)、实时数据发送(TPDO)、实时数据接收(RPDO)、服务数据对象、同步报文、紧急事件等支持,同时还能够根据需求支持不同的协议描述规范。
使用Tiny-ARM CANopen从站模块可快速开发基于CANopen协议的控制设备、数据采集设备等,配合CANopen系列主站设备组建CANopen网络,迅速搭建工业现场总线分布式监控系统。
3 TinyARM CANopen协议栈配置TinyARM是一款可二次开发的嵌入式模块,提供API函数库。
CANopen协议栈也是以API函数库形式提供,使开发者在开发CANopen设备的时候使用起来非常方便。
CANopen协议浅析(一)
Consumer(s
Remote Frame Remotely requested Producer
Consumer(s
Sync Synchronous transmission (cyclic,acyclic) Producer
Consumer(s
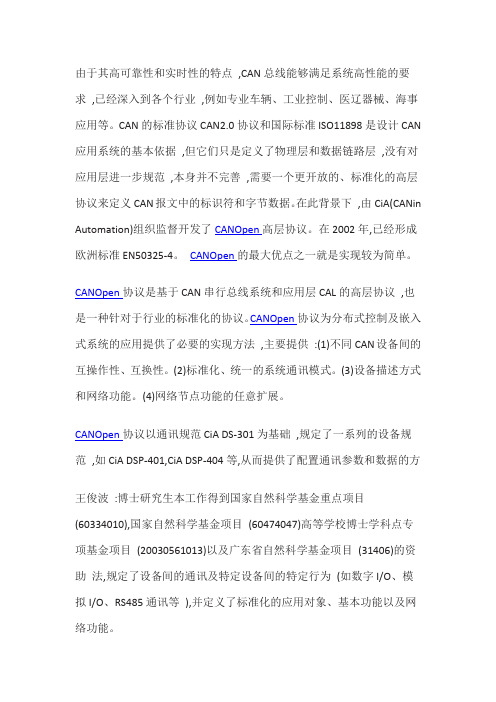
CANopen通信对象 通信对象
PDO 的传输类型:
主索引 子索引 0 1 2020 2 3 变量 包括的对象数目 Drive Command register Frequency Command E.F. Reset 数据类型 UNSIGNED8 UNSIGNED16 UNSIGNED16 UNSIGNED16
CANopen通信对象 通信对象
Process Data Objects (PDO) Protocol Service Data Object (SDO) Protocols Special Object Protocols: •Synchronization (SYNC) Protocol Synchronization •Time Stamp Protocol Time •Emergency (EMCY) Protocol Emergency Network Management Protocols: •NMT Message Protocol NMT •Boot-Up Protocol •Error Control Protocol Error
CANopen通信对象 通信对象
Client/Server Model
Server Indication 0 ~8 Byte CAN Data Frame 1 response 0 ~8 Byte CAN Data Frame 2 confirmation Client request
致远电子-XGate-COP12 嵌入式CANopen 通信模块 用户手册说明书
广州致远电子股份有限公司XGate-COP12嵌入式CANopen通信模块修订历史名词解释:制表示,子索引为十进制表示,索引与子索引中间用空格或“/”隔开。
目录1. CANopen协议简介 (1)1.1CANopen对象字典 (1)1.2CANopen通讯 (2)2. XGate-COP12特点 (4)2.1XGate-COP12状态指示灯(DS303-3) (5)3. XGate-COP12节点ID与CAN总线波特率 (7)3.1CANopen节点地址和波特率设置 (7)4. XGate-COP12中使用CANopen协议(DS301) (8)4.1XGate-COP12的对象字典 (8)4.2XGate-COP12预定义连接 (8)4.3XGate-COP12操作 (9)4.3.1网络管理服务(NMT) (9)4.3.2同步报文对象(SYNC) (11)4.3.3紧急报文对象(EMCY) (12)4.3.4服务数据对象(SDO) (13)4.3.5过程数据对象(PDO) (16)5. 输入输出数据缓冲区 (20)6. XGate-COP12串口/SPI操作 (21)6.1通信协议 (21)6.1.1数据帧格式 (22)6.2XGate-COP12操作命令 (23)6.2.1读设备信息(命令码:0x01) (23)6.2.2写设备信息(命令码:0x02) (24)6.2.3写XGate-COP12输入缓冲区数据(命令码:0x10) (24)6.2.4读XGate-COP12输出缓冲区数据(命令码:0x11) (25)6.2.5读写XGate-COP12的NodeID和CAN波特率索引(命令码:0x12) .. 256.2.6发送紧急代码(命令码:0x15) (26)6.2.7读取模块状态(命令码:0x16) (27)6.2.8启动节点进入操作状态(命令码:0x17) (27)6.2.9复位模块(命令码:0x24) (28)6.2.10读取XGate-COP12软硬件版本(命令码:0x25) (28)6.2.11重置内部E2PROM(命令码:0xED) (29)6.3XGate-COP12串口/SPI操作错误响应 (29)附录A 串口可操作对象字典列表 (31)附录B XGate-COP12缺省对象字典 (32)附录C XGate-COP12对象字典样例 (36)CANopen协议是在20世纪90年代末,由CiA组织(CAN-in-Automation)在CAL(CAN Application Layer)的基础上发展而来,一经推出便在欧洲得到了广泛的认可与应用。
CANopen协议

CANopen协议协议名称:CANopen协议一、引言CANopen协议是一种用于控制器局域网络(Controller Area Network,CAN)的通信协议。
它定义了在CAN总线上进行通信的规则和数据结构,使得不同设备之间可以进行可靠的数据交换和通信。
本协议旨在提供一套标准化的通信协议,以便在CAN总线上实现设备之间的互操作性。
二、范围本协议适合于所有基于CAN总线的设备和系统,包括但不限于工业自动化、汽车电子、机器人技术、医疗设备等领域。
它定义了通信的物理层、数据链路层、网络层和应用层的规范。
三、术语和定义在本协议中,以下术语和定义适合:1. CAN总线:指控制器局域网络(Controller Area Network),一种串行通信协议,用于在不同设备之间传输数据。
2. 节点:指连接到CAN总线上的设备,每一个节点都有一个惟一的标识符。
3. 帧:指CAN总线上传输的数据单元,包含数据和控制信息。
4. 数据对象(Data Object):指CANopen协议中用于存储和传输数据的基本单元。
5. 服务数据对象(Service Data Object):指用于请求和响应CANopen服务的数据对象。
6. 状态机:指CANopen设备的工作状态转换图,定义了设备在不同状态下的行为和响应。
四、物理层规范1. CAN总线的物理层采用标准的CAN物理层规范,包括电气特性、传输速率和线缆连接等。
2. 设备之间的连接必须符合CAN总线的物理层规范,并使用合适的线缆和连接器。
五、数据链路层规范1. CANopen协议使用标准的CAN数据链路层协议,包括帧格式、帧类型和错误检测等。
2. 数据链路层必须支持CAN帧的发送和接收,并能够正确处理错误帧和冲突。
六、网络层规范1. CANopen协议定义了一套基于网络层的通信机制,用于节点之间的消息传递和数据交换。
2. 网络层提供了节点之间的数据传输服务,包括数据对象的读取、写入和定阅等功能。
canopennode用法
CANopenNode是免费开源的CANopen协议栈,用于嵌入式控制系统。
它使用ANSIC语言以面向对象的方式编写,可以运行在不同的微控制器上,作为裸机应用或带RTOS应用。
以下是CANopenNode的一些主要用法和功能:实现网络管理协议中的NMT从站状态机(启动、停止、复位设备)和简单的NMT主站。
支持错误控制协议中的心跳消息的生产者(发送方)和消费者(接收方)。
支持PDO连接和动态映射到过程变量的快速交互。
支持SDO快速传输、常规(分段)传输和块传输。
支持SDO主站,可以访问网络内任何CANopen设备上的任何对象字典变量。
支持紧急消息的生产者和消费者。
支持同步协议中的生产者和消费者,用于网络同步传输PDO对象。
支持授时协议中的生产者和消费者,用于日期和时间同步。
支持非易失性存储,可以保存对象字典或其他变量的值。
支持LSS服务的主站和从机,用于设置CANopen节点ID和比特率等参数。
提供了完整的CANopen对象字典,用于存储和管理各种变量和参数。
提供了丰富的API函数,方便用户进行二次开发和定制。
总的来说,CANopenNode是一个功能强大的CANopen协议栈,提供了完整的CANopen功能和API接口,方便用户进行嵌入式控制系统的设计和开发。
更多信息可以参考CANopenNode的官方文档和源代码。
嵌入式can应用层协议控制器分析与实现
CANOpen设备将能够实现不同公司产品间的互操作。
另外,CANOr,en协议是免许可证的,任何组织和个人都可以开发支持CANOpen协议的设备而不用支付版税,并可以向CiA索取CANOpell协议规范。
这也是c^Nopen得到迅猛发展的重要原因之一。
CANOpen目前已在汽车工业控制系统,公共交通运输系统,医疗设备,海运电子设备和建筑自动化系统中取得了广泛的应用,是将CAN应用推向深化的理想选择。
CANOpen协议中包含了标准的应用层规范和通信规范,其通信模型如图1-I所示。
在CANOpell的应用层,设备间通过相互交换通信对象进行通信-m。
良好的分层和面向对象的设计思想将带给用户一个清晰的通信模型。
CANOpen设备模块可以被分为通信协议对象、对象字典、应用程序3部分,如图I-2所示。
图1.2CANOpen设备模型通信协议软件提供设备在总线上收发通信对象的服务。
不同ChNOpen设备问的通信都是通过交换通信对象完成的。
这一部分直接面向CAN控制器进行操作。
对象字典[111描述了设备使用的所有的数据类型,通信对象和应用对象,是CANOpell设备的核心部分。
对象字典位于通信程序和应用程序之间,向应用程序提供接口,应用程序对对象字典进行操作就可以实现CANOpen通信。
理解对象字典的概念是理解CANOpen模型的关键。
应用程序由用户编写,包括功能部分和通信部分。
通信部分通过面向对象字典进行操作实现CANOpen通信,而功能部分由用户根据应用要求实现。
议和通信协议,如图4.1。
用户可以根据需要添加应用层子协议。
图4-!CANOpen协议层次框图根据设计功能需要,本设计在主站定义一下功能:1.自动监测控制网中CANOpen设备工作状态,通过NMT的Node_guarding实现功能。
2.初始化节点设备D,管理节点设备信息,通过NMT实现功能。
3.支持同步方式和异步方式,通过基础变量类型CMS实现功能。
canopen协议详解

canopen协议详解CANopen协议详解。
CANopen是一种基于CAN总线的高层通信协议,它广泛应用于工业控制、汽车电子、医疗设备等领域。
本文将详细介绍CANopen协议的相关内容,包括其基本原理、通信对象、数据传输方式以及应用范围等方面的内容。
首先,我们来了解一下CANopen协议的基本原理。
CANopen协议是建立在CAN总线之上的一种通信协议,它采用了基于对象字典的通信模型,通过定义不同的通信对象来实现设备之间的数据交换。
CANopen协议还采用了一种灵活的网络管理机制,可以实现设备的自动识别和配置。
这种基于对象字典的通信模型和灵活的网络管理机制,使得CANopen协议在工业控制领域得到了广泛的应用。
其次,我们将介绍CANopen协议中的通信对象。
CANopen协议定义了许多不同类型的通信对象,包括PDO(过程数据对象)、SDO(服务数据对象)、NMT (网络管理对象)等。
这些通信对象可以实现设备之间的数据交换、参数配置、网络管理等功能。
通过对这些通信对象的灵活应用,可以实现复杂的控制系统,满足不同应用场景的需求。
接下来,我们将详细介绍CANopen协议的数据传输方式。
CANopen协议采用了基于事件驱动的数据传输方式,通过PDO和SDO等通信对象来实现数据的传输和交换。
PDO是一种实时数据传输方式,可以实现设备之间的实时数据交换;而SDO则是一种参数配置和管理方式,可以实现设备参数的读写和配置。
通过这些数据传输方式,CANopen协议可以实现设备之间的高效通信和数据交换。
最后,我们将介绍CANopen协议在不同领域的应用范围。
由于CANopen协议具有灵活的通信模型、丰富的通信对象和高效的数据传输方式,它在工业控制、汽车电子、医疗设备等领域得到了广泛的应用。
在工业控制领域,CANopen协议可以实现设备之间的实时数据交换和控制,满足复杂控制系统的需求;在汽车电子领域,CANopen协议可以实现车载电子设备之间的通信和数据交换;在医疗设备领域,CANopen协议可以实现医疗设备之间的数据交换和控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种嵌入式CANopen协议栈开发模块的实现
1 引言
CANopen是一种架构在控制局域网路(Control Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定常在嵌入式系统中使用,也是工业控制常用到的一种现场总线。
CANopen 实作了OSI模型中的网络层以上(包括网络层)的协定。
CANopen 标准包括寻址方案、数个小的通讯子协定及由设备子协定所定义的应用层。
CANopen 支援网络管理、设备监控及节点间的通讯,其中包括一个简易的传输层,可处理资料的分段传送及其组合。
一般而言资料链结层及实体层会用CAN来实作。
除了 CANopen 外,也有其他的通讯协定(如EtherCAT)实作 CANopen 的设备子协定。
基本的 CANopen 设备及通讯子协定定义在 CAN in Automation(CiA) draft standard301. 中。
针对个别设备的子协定以 CiA 301 为基础再进行扩充。
如针对 I/O 模组的 CiA401 及针对运动控制的 CiA402.
2 TinyARM简介
TinyARM模块内置了CANopen从站协议,为用户灵活快速设计CANopen从站,构建符合国际标准的工业现场总线及分布式网络提供了更多、更好的选择。
TinyARM模块外观如图1所示。
TinyARM CANopen从站模块提供了网络管理(NMT)、实时数据发送(TPDO)、实时数据接收(RPDO)、服务数据对象、同步报文、紧急事件等支持,同时还能够根据需求支持不同的协议描述规范。
使用Tiny-ARM CANopen 从站模块可快速开发基于CANopen协议的控制设备、数据采集设备等,配合CANopen系列主站设备组建CANopen 网络,迅速搭建工业现场总线分布式监控系统。
3 TinyARM CANopen协议栈配置
TinyARM是一款可二次开发的嵌入式模块,提供API函数库。
CANopen协议栈也是以API函数库形式提供,使开发者在开发CANopen设备的时候使用起来非常方便。
由于CANopen协议栈会使用到相应的硬件资源,因此开发者首先需要配置CANopen协议栈硬件资源,例如CANopen RUN和ERROR指示灯所对应的I/O端口等,正确的硬件配置可使协议栈稳定可靠地运行。
3.1 CANopen协议栈硬件资源配置
通讯单元处理和网络上其他模组通讯所需要的通讯协定。
设备的启动及重置由状态机(state machine)控制。
状态机需包括以下的几个状态:Initialization, Pre-operational, Operational 及 Stopped.当接收到网络管理(NMT)通讯对象,状态机会转换到对应的状态。
对象字典(Object Dictionary)是一个有 16 位元索引(Index)的变量阵列。
每个变量可以(但非必须)有 8 位元的子索引(Subindex)。
变量可用来调整设备的组态,也可以对应设备量测的资料或设备的输出。
当状态机设定为 operational 之后,设备的应用
(application)部份就会实现设备预期的机能。
此部份可以由对象字典中的变量调整其设定,而资料由通讯层传收或接收。
(1)指示灯端口配置
按照CANopen协议DS303-3的定义,CANopen从站需要使用两种颜色的LED指示灯来指示运行和错误状态,运行指示灯使用绿色,错误指示灯使用红色,根据实际硬件来设置LED控制端口。
协议栈通过调用如表1所示的3个函数来实现,配置文件与协议栈结构如图2所示。
(2)参数存储函数
参数存储相对来说更复杂一些,需要根据实际硬件条件来修改相应的实现函数,其中的_TgtCavInit、
_TgtCavOpen、_TgtCavClose、_TgtCavDelete、_TgtCavCreate、_TgtCavShutDown等函数执行对存储器进行初始化或关闭存储器等操作,在协议栈初始化或关闭时被调用。
函数_TgtCavStore、_TgtCavRestore主要负责参数的存储与读取,CANopen协议栈的参数存储以对象字典为最小单位,每存储或恢复一次对象字典的参数都会调用存储或恢复参数函数,存储、恢复函数与协议栈的关系如图2所示。
3.2 设计对象字典
设计CANopen的对象字典主要分为以下两个步骤,其与协议栈结构关系如图2所示。
(1)生成对象字典
对象字典是CANopen的核心,不同的设备描述规范或不同的应用就有不同的对象字典,因此对于一款能支持二次开发的模块来说,根据具体需求生成相应的对象字典也是必不可少。
TinyARM 中的CANopen对象字典可以通过ODBuilder软件来生成,生成的对象字典为3个标准C文件,文件名分别为:obdcfg.h,、objdict.c、objdict.h,把工程中的同名文件覆盖即可将CANopen的对象字典项目更改为新设定的对象字典项目,CANopen所支持的设备规范也可随之改变。
(2)对象字典的变量定义
对于对象字典索引在0x1000~0x1FFF范围内的对象字典,其变量存储地址已经在协议栈中预定义,不需要开发者再次定义。
索引在0x2000~0x9FFF之间的索引,需要重新映射变量地址,否则对象字典无法正确存储数据。
在TinyARM CANopen中,为了使开发者方便映射对象字典变量,在文件名为usrcoppardef.c的文件中定义了一个参数数组__VarTabg,将需要定义的对象字典变量地址添加到该表格中即可,其格式与使用示例如图3所示。
3.3 预定义连接设置
在CANopen运行时通常采用DS301所建议的预定义连接COB-ID(通信对象标识),其中预定义连接集包括PDO、SDO、NMT、SYNC以及EMCY等服务。
协议栈在启动时已经将(除RPDO和TPDO以外)一些服务的COB-ID设定为预定义连接,开发者只需要重新设定RPDO和TPDO的预定义连接即可。
同样开发者只需要在PDO预定义表格中添加项目即可,实现示例如图4所示。
4 TinyARM CANopen API函数编程
如图5所示为CANopen协议栈工作流程图,其中CopInit为初始化CANopen协议栈,CopBootUp发送CANopen 启动信息并且进入预操作状态,CopThread 为CANopen协议栈线程函数,需要应用程序循环调用。
开发者可以通过CopODRead和CopODWrite对对象字典进行读写操作。
实现实例:图6展示了如何启动CANopen协议栈并使之处于运行状态。
开发者利用TinyARM CANopen可完全自主进行二次开发,方便地实现各种标准CANopen从站设备。
例如,数字量输入输出设备、电机控制设备、数字传感器设备、织布机设备、充电设备等各种设备。
使开发者在最短的时间内开发出CANopen从站设备,抢占市场先机。