超声波倒车雷达开题报告
超声波检测的倒车雷达开题报告

《基于超声波检测的倒车雷达设计》开题报告一、课题的目的和意义1.研究目的(1)研究了一种汽车倒车雷达预警系统。
该系统在常见的汽车倒车预警装置的基础上采用计算机控制技术和超声波测距技术,通过显示障碍物与汽车的距离并根据其距离远近实时发出报警,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,提高了驾驶安全性。
(2)在研究汽车倒车雷达预警系统过程中,运用理论分析、电路设计和计算机仿真等研究手段,完成了倒车雷达预警系统硬件和软件的设计,采用了模糊控制算法,进行了系统的计算机仿真。
2.研究意义随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有自己的汽车。
在享受汽车给我们带来的便利同时,由于倒车而产生的问题也日益突出。
一方面汽车的数量逐年增加,公路、街道、停车场和车库拥挤不堪,可转动的空间越来越少;另一方面,新司机及非专职司机越来越多,因倒车引起的纠纷越来越多,车辆之间、车辆与人、车辆与墙壁等障碍物之间的碰撞时有发生。
在2006年汽车事故的发生比例中,倒车引起的事故占28%,倒车己成为令人们头痛的一项任务,即使是经验丰富的司机也在抱怨倒车是件费力费神的事。
据统计危险境况时,如果能给驾驶员半秒钟的预处理时间,则可分别减少追尾事故的30%,路面相关事故的50%,迎面撞车事故的60%。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,可将车快速准确地停放到指定的位置。
二、文献综述国外汽车倒车雷达预警系统早期大多采用红外线的发射与接收原理,不属于雷达(无线电波)的产品,最大的缺点是红外线波易受干扰,整个系统的警示音常呈现不稳定的乱鸣状态,另外对深黑色粗糙表面物体的反应也较差。
但更糟糕的是,无论是红外线发射器或接收器,只要任何一方让一层薄薄的冰雪或泥尘覆盖,系统就会失效。
最近在欧美出现的一种电磁感应倒车雷达。
开题报告具有汽车倒车影像的倒车雷达系统的设计

本科生毕业设计(论文)开题报告题目具有汽车倒车影像的__倒车雷达系统的设计院(系)______信息工程学院____专业______ 通信工程_ __班级________T1042_________姓名________何京徽________指导教师________王明志_______开题时间___2014年2月24日___吉林工程技术师范学院教务处制一、立论依据二、研究方案三、设计(论文)选题评议四、考核组成员原文已完。
下文为附加文档,如不需要,下载后可以编辑删除,谢谢!施工组织设计本施工组织设计是本着“一流的质量、一流的工期、科学管理”来进行编制的。
编制时,我公司技术发展部、质检科以及项目部经过精心研究、合理组织、充分利用先进工艺,特制定本施工组织设计。
一、工程概况:西夏建材城生活区27#、30#住宅楼位于银川市新市区,橡胶厂对面。
本工程由宁夏燕宝房地产开发有限公司开发,银川市规划建筑设计院设计。
本工程耐火等级二级,屋面防水等级三级,地震防烈度为8度,设计使用年限50年。
本工程建筑面积:27#楼3824.75m2;30#楼3824.75 m2。
室内地坪±0.00以绝对标高1110.5 m为准,总长27#楼47.28m;30#楼47.28 m。
总宽27#楼14.26m;30#楼14.26 m。
设计室外地坪至檐口高度18.6 00m,呈长方形布置,东西向,三个单元。
本工程设计屋面为坡屋面防水采用防水涂料。
外墙水泥砂浆抹面,外刷浅灰色墙漆。
内墙面除卫生间200×300瓷砖,高到顶外,其余均水泥砂桨罩面,刮二遍腻子;楼梯间内墙采用50厚胶粉聚苯颗粒保温。
地面除卫生间200×200防滑地砖,楼梯间50厚细石砼1:1水泥砂浆压光外,其余均采用50厚豆石砼毛地面。
楼梯间单元门采用楼宇对讲门,卧室门、卫生间门采用木门,进户门采用保温防盗门。
本工程窗均采用塑钢单框双玻窗,开启窗均加纱扇。
基于超声波的汽车倒车防撞报警系统软件设计【开题报告】
毕业设计开题报告测控技术与仪器基于超声波的汽车倒车防撞报警系统软件设计1选题的背景、意义[1][2]随着经济的发展,人们的生活水平越来越高。
当今,对许多人来说,汽车进入家庭已不再是奢望,汽车的数量在大幅攀升,交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失。
因此随之而来的事情就是如何保证汽车使用过程中的安全问题,特别是如何防止汽车与其他物体碰撞的事情发生。
据初步调查统计,l5%的汽车事故是由汽车倒车"后视"不良造成的。
因此,增强汽车的后视能力,对于提高行车安全,减轻司机的劳动强度和心理压力,是十分重要的。
如果车辆能适时检测与周围障碍物的距离并给出警告信息,使司机及早采取行动,可避免车辆相撞事故的发生。
随着科学技术的发展,用超声波进行无接触测量得到了广泛的应用。
超声波是由机械振动产生的,可在不同介质中以不同的速度传播,它具有定向性好、能量集中、在传输过程中衰减较小,反射能力较强,在恶劣工作环境下具有一定的适应能力等优点。
因此可用于液位测量、车辆自动导航等领域。
利用超声波测距技术的汽车倒车防撞雷达(以下简称倒车雷达),近年来逐渐在行业风行。
一些名车如奔驰、法拉利、本田雅阁等相继采用了该系统用于辅助倒车,在现时的车展上屡见不鲜。
究其原因是因为倒车镜有死角,驾车者目测距离有误差等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想。
据此,这些车厂将倒车雷达作为一个卖点,声称倒车雷达在车主的一生中只要发挥一次作用就很值得了。
既然倒车雷达能够增加汽车的整体安全性能,何以只到近年才得以发展呢?众所周知,超声波测距技术由来已久,多年来已在一些领域得到应用。
例如利用超声波技术的自动测距照相机、建筑商使用的手持式墙面测距仪。
而用于汽车防撞却是近年的事。
这主要原因是传统的超声波传感器不能达到汽车行业的特殊要求。
超声波测距仪开题报告

负责人(院系公章):2012年2月24日
【研究思路及拟采用的研究方法】
硬件电路主要分为单片机系统、显示电路、超声波发射电路、超声波检测接收电路四部分。单片机系统输出信号驱动超声波发射电路发射超声波,超声波接收电路接收反射回来的超声波信号,再经单片机系统计算,将结果送至显示电路。
软件设计主要由主程序、超声波发射子程序、超声波接收子程序及显示子程序组成。超声波主程序用于设置定时器的初值和工作方式等。之后,调用超声波发生子程序发出一个超声波脉冲。一旦接收到返回超声波信号,立即进入超声波接收子程序,并调用显示子程序。
【研究的主要内容及预期目标】
超声波测距仪的主要研究内容如下:
1.对超声波测距仪在汽车倒车中的应用进行分析,给出系统设计方案。
2.根据超声波测距仪功能进行模块化设计,绘制电气原理图并选择合适的电子元件。
3.根据电气原理图用软件模拟电路,编写程序,进行仿真调试。
4.焊接实验电路板,烧写程序并进行调试。
超声波在液体及固体中传播,衰减较小,传播较远。但在空气介质中的传播速度受温度影响,并且在空气中传播信号强度衰减较快,测量距离越大误差越大。因此,本测距仪预期测量范围0.1~1m,测量精度为1cm,且要具有较好的重复性。测量结果利用LED显示。
论证、开题、撰写开题报告
2012.02.25~2012.04.18
写作初稿
2012.04.19~2012.05.04
修改、定稿、打印
2012.05.26~2012.06.03
论文答辩
【主要参考文献】
[1] 赵建领,薛园园等主编.51单片机开发与应用技术详解[M].电子工业出版社,2009
[2]李朝青.单片机原理及接口技术(第3版)[M].北京航空航天大学出版社,2005
超声波开题_rd

本科毕业设计(论文)开题报告学生姓名黄哲立学号08B08090231指导教师詹振球学院(系)机电学院专业微电子学交稿日期2011年12月2日教务处制一、开题报告二、阅读文献目录三、文献综述四、文献翻译注意:请将外文文献原文复印件附在后面。
Ultrasonic distance meterDocument Type and Number:United States Patent 5442592Abstract:An ultrasonic distance meter cancels out the effects of temperature and humidity variations by including a measuring unit and a reference unit. In each of the units, a repetitive series of pulses is generated, each having a repetition rate directly related to the respective distance between an electroacoustic transmitter and an electroacoustic receiver. The pulse trains are provided to respective counters, and the ratio of the counter outputs is utilized to determine the distance being measured.Publication Date:08/15/1995Primary Examiner:Lobo, Ian J.1、BACKGROUND OF THE INVENTIONThis invention relates to apparatus for the measurement of distance and, more particularly, to such apparatus which transmits ultrasonic waves between two points.Precision machine tools must be calibrated. In the past, this has been accomplished utilizing mechanical devices such as calipers, micrometers, and the like. However, the use of such devices does not readily lend itself to automation techniques. It is known that the distance between two points can be determined by measuring the propagation time of a wave travelling between those two points. One such type of wave is an ultrasonic, or acoustic, wave. When an ultrasonic wave travels between two points, the distance between the two points can be measured by multiplying the transit time of the wave by the wave velocity in the medium separating the two points. It is therefore an object of the present invention to provide apparatus utilizing ultrasonic waves to accurately measure the distance between two points.When the medium between the two points whose spacing is being measured is air, the sound velocity is dependent upon the temperature and humidity of the air. It is therefore a further ob ject of the,present invention to provide apparatus of the type described which is independent of temperature and humidity variations.2、SUMMARY OF THE INVENTIONThe foregoing and additional objects are attained in accordance with the principles of this invention by providing distance measuring apparatus which includes a reference unit and a measuring unit. The reference and measuring units are the same and each includes an electroacoustic transmitter and an electroacoustic receiver. The spacing between the transmitter and the receiver of the reference unit is a fixed reference distance, whereas the spacing between the transmitter and receiver of the measuring unit is the distance to be measured. In each of the units, the transmitter and receiver are coupled by a feedback loop which causes the transmitter to generate an acoustic pulse which is received by the receiver and converted into an electrical pulse which is then fed back to the transmitter, so that a repetitive series of pulses results. The repetition rate of the pulses is inversely related to thedistance between the transmitter and the receiver. In each of the units, the pulses are provided to a counter. Since the reference distance is known, the ratio of the counter outputs is utilized to determine the desired distance to be measured. Since both counts are identically influenced by temperature and humidity variations, by taking the ratio of the counts, the resultant measurement becomes insensitive to such variations.3、BRIEF DESCRIPTION OF THE DRAWINGSThe foregoing will be more readily apparent upon reading the following description in conjunction with the drawing in which the single FIGURE schematically depicts apparatus constructed in accordance with the principles of this invention.4、DETAILED DESCRIPTIONReferring now to the drawing, there is shown a measuring unit 10 and a reference unit 12, both coupled to a utilization means 14. The measuring unit 10 includes an electroacoustic transmitter 16 and an electroacoustic receiver 18. The transmitter 16 includes piezoelectric material 20 sandwiched between a pair of electrodes 22 and 24. Likewise, the receiver 18 includes piezoelectric material 26 sandwiched between a pair of electrodes 28 and 30. As is known, by applying an electric field across the electrodes 22 and 24, stress is induced in the piezoelectric material 20. If the field varies, such as by the application of an electrical pulse, an acoustic wave 32 is generated. As is further known, when an acoustic wave impinges upon the receiver 18, this induces stress in the piezoelectric material 26 which causes an electrical signal to be generated across the electrodes 28 and 30. Although piezoelectric transducers have been illustrated, other electroacoustic devices may be utilized, such as, for example, electrostatic, electret or electromagnetic types.As shown, the electrodes 28 and 30 of the receiver 18 are coupled to the input of an amplifier 34, whose output is coupled to the input of a detector 36. The detector 36 is arranged to provide a signal to the pulse former 38 when the output from the amplifier 34 exceeds a predetermined level. The pulse former 38 then generates a trigger pulse which is provided to the pulse generator 40. In order to enhance the sensitivity of the system, the transducers 16 and 18 are resonantly excited. There is accordingly provided a continuous wave oscillator 42 which provides a continuous oscillating signal at a fixed frequency, preferably the resonant frequency of the transducers 16 and 18. This oscillating signal is provided to the modulator 44. To effectively excite the transmitter 16, it is preferable to provide several cycles of the resonant frequency signal, rather than a single pulse or single cycle. Accordingly, the pulse generator 40 is arranged, in response to the application thereto of a trigger pulse, to provide a control pulse to the modulator 44 having a time duration equal the time duration of a predetermined number of cycles of the oscillating signal from the oscillator 42. This control pulse causes the modulator 44 to pass a "burst" of cycles to excite the transmitter 16.When electric power is applied to the described circuitry, there is sufficient noise at the input to the amplifier 34 that its output triggers the pulse generator 40 to cause a burst of oscillating cyclesto be provided across the electrodes 22 and 24 of the transmitter 16. The transmitter 16 accordingly generates an acoustic wave 32 which impinges upon the receiver 18. The receiver 18 then generates an electrical pulse which is applied to the input of the amplifier 34, which again causes triggering of the pulse generator 40. This cycle repeats itself so that a repetitive series of trigger pulses results at the output of the pulse former 38. This pulse train is applied to the counter 46, as well as to the pulse generator 40.The transmitter 16 and the receiver 18 are spaced apart by the distance "D" which it is desired to measure. The propagation time "t" for an acoustic wave 32 travelling between the transmitter 16 and the receiver 18 is given by: t=D/V swhere V s is the velocity of sound in the air between the transmitter 16 and the receiver 18. The counter 46 measures the repetition rate of the trigger pulses, which is equal to 1/t. Therefore, the repetition rate is equal to V s /D. The velocity of sound in air is a function of the temperature and humidity of the air, as follows: ##EQU1## where T is the temperature, p is the partial pressure of the water vapor, H is the barometric pressure, Γ w and Γ a are the ratio of co nstant pressure specific heat to constant volume specific heat for water vapor and dry air, respectively. Thus, although the repetition rate of the trigger pulses is measured very accurately by the counter 46, the sound velocity is influenced by temperature and humidity so that the measured distance D cannot be determined accurately.In accordance with the principles of this invention, a reference unit 12 is provided. The reference unit 12 is of the same construction as the measuring unit 10 and therefore includes an electroacoustic transmitter 50 which includes piezoelectric material 52 sandwiched between a pair of electrodes 54 and 56, and an electroacoustic receiver 58 which includes piezoelectric material 60 sandwiched between a pair of electrodes 62 and 64. Again, transducers other than the piezoelectric type can be utilized. The transmitter 50 and the receiver 58 are spaced apart a known and fixed reference distance "D R ". The electrodes 62 and 64 are coupled to the input of the amplifier 66, whose output is coupled to the input of the detector 68. The output of the detector 68 is coupled to the pulse former 70 which generates trigger pulses. The trigger pulses are applied to the pulse generator 72 which controls the modulator 74 to pass bursts from the continuous wave oscillator 76 to the transmitter 50. The trigger pulses from the pulse former 70 are also applied to the counter 78.Preferably, all of the transducers 16, 18, 50 and 58 have the same resonant frequency. Therefore, the oscillators 42 and 76 both operate at that frequency and the pulse generators 40 and 72 provide equal width output pulses.In usage, the measuring unit 10 and the reference unit 12 are in close proximity so that the sound velocity in both of the units is the same. Although the repetition rates of the pulses in the measuring unit 10 and the reference unit 12 are each temperature and humidity dependent, it can be shown that the distance D to be measured is related to the reference distance D R as follows: i D=D R (1/t R )/(1/t)where t R is the propagation time over the distance D R in the reference unit 12. This relationship is independent of both temperature and humidity.Thus, the outputs of the counters 46 and 78 are provided as inputs to the microprocessor 90 in the utilization means 14. The microprocessor 90 is appropriately programmed to provide an output which is proportional to the ratio of the outputs of the counters 46 and 78, which in turn are proportional to the repetition rates of the respective trigger pulse trains of the measuring unit 10 and the reference unit 12. As described, this ratio is independent of temperature and humidity and, since the reference distance D R is known, provides an accurate representation of the distance D. The utilization means 14 further includes a display 92 which is coupled to and controlled by the microprocessor 90 so that an operator can readily determine the distance D.Experiments have shown that when the distance between the transmitting and receiving transducers is too small, reflections of the acoustic wave at the transducer surfaces has a not insignificant effect which degrades the measurement accuracy. Accordingly, it is preferred that each transducer pair be separated by at least a certain minimum distance, preferab ly about four inches.Accordingly, there has been disclosed improved apparatus for the measurement of distance utilizing ultrasonic waves. While an illustrative embodiment of the present invention has been disclosed herein, it is understood that various modifications and adaptations to the disclosed embodiment will be apparent to those of ordinary skill in the art and it is intended that this invention be limited only by the scope of the appended claims.R01UH0106EJ0400_78K0RKX3LCHAPTER 11 CLOCK OUTPUT/BUZZER OUTPUT CONTROLLERThe number of output pins of the clock output and buzzer output controllers differs, depending on the product.Furthermore, 44-pin product of the 78K0R/KC3-L are not provided with clock output and buzzer output controllers.11.1 Functions of Clock Output/Buzzer Output ControllerThe clock output controller is intended for carrier output during remote controlled transmission and clock output forsupply to peripheral ICs.Buzzer output is a function to output a square wave of buzzer frequency.One pin can be used to output a clock or buzzer sound.Two output pins, PCLBUZ0 and PCLBUZ1, are available.The PCLBUZn pin outputs a clock selected by clock output select register n (CKSn).Figure 11-1 shows the block diagram of clock output/buzzer output controller.11.2 Configuration of Clock Output/Buzzer Output ControllerThe clock output/buzzer output controller includes the following hardware.Table 11-1. Configuration of Clock Output/Buzzer Output ControllerItem ConfigurationControl registers Clock output select registers n (CKSn)Port mode registers 5, 14 (PM5, PM14)NotePort registers 5, 14 (P5, P14) NoteNote The port mode register and port register to be set differ depending on the product.78K0R/KC3-L (48-pin), 78K0R/KD3-L: P1478K0R/KE3-L, 78K0R/KG3-L: PM14, P1478K0R/KF3-L: PM5, P5, PM14, P14Remark n = 0: 78K0R/KC3-L (48-pin), 78K0R/KD3-Ln = 0, 1: 78K0R/KE3-L, 78K0R/KF3-L, 78K0R/KG3-L11.3 Registers Controlling Clock Output/Buzzer Output ControllerThe following two registers are used to control the clock output/buzzer output controller.C lock output select registers n (CKSn)P ort mode registers 5, 14 (PM5, PM14) NoteNote The port register to be set differ depending on the product.78K0R/KC3-L (48-pin), 78K0R/KD3-L: None78K0R/KE3-L, 78K0R/KG3-L: PM1478K0R/KF3-L: PM5, PM14(1) Clock output select registers n (CKSn)These registers set output enable/disable for clock output or for the buzzer frequency output pin(PCLBUZn), andset the output clock.Select the clock to be output from the PCLBUZn pin by using the CKSn register.The CKSn register are set by a 1-bit or 8-bit memory manipulation instruction.Reset signal generation clears these registers to 00H.Remark n = 0: 78K0R/KC3-L (48-pin), 78K0R/KD3-Ln = 0, 1: 78K0R/KE3-L, 78K0R/KF3-L, 78K0R/KG3-L11.4 Operations of Clock Output/Buzzer Output ControllerOne pin can be used to output a clock or buzzer sound.The PCLBUZ0 pin outputs a clock/buzzer selected by the clock output select register 0 (CKS0).The PCLBUZ1 pin outputs a clock/buzzer selected by the clock output select register 1 (CKS1).11.4.1 Operation as output pinThe PCLBUZn pin is output as the following procedure.<1> Select the output frequency with bits 0 to 3 (CCSn0 to CCSn2, CSELn) of the clock output select register (CKSn)of the PCLBUZn pin (output in disabled status).<2> Set bit 7 (PCLOEn) of the CKSn register to 1 to enable clock/buzzer output.Remarks 1. The controller used for outputting the clock starts or stops outputting the clock one clock after enabling ordisabling clock output (PCLOEn bit) is switched. At this time, pulses with a narrow width are not output.Figure 11-4 shows enabling or stopping output using the PCLOEn bit and the timing of outputting the clock.2. n = 0: 78K0R/KC3-L (48-pin), 78K0R/KD3-Ln = 0, 1: 78K0R/KE3-L, 78K0R/KF3-L, 78K0R/KG3-LCHAPTER 7 CLOCK GENERATOR7.1 Functions of Clock GeneratorThe clock generator generates the clock to be supplied to the CPU and peripheral hardware.The following three kinds of system clocks and clock oscillators are selectable.(1) Main system clock<1> X1 oscillatorThis circuit oscillates a clock of fX = 2 to 20 MHz by connecting a resonator to X1 and X2. Oscillation can be stopped by executing the STOP instruction or setting of the MSTOP bit (bit 7 of the clockoperation status control register (CSC)).<2> Internal high-speed oscillatorNoteThis circuit oscillates clocks of fIH = 1 and 8 MHz (TYP.). After a reset release, the CPU always starts operating with this internal high-speed oscillation clock. Oscillation can be stopped by executing the STOPinstruction or setting the HIOSTOP bit (bit 0 of the CSC register).<3> 20 MHz internal high-speed oscillation clock oscillatorNoteThis circuit oscillates a clock of fIH20 = 20 MHz (TYP.). Oscillation can be started by setting bit 0 (DSCON) ofthe 20 MHz internal high-speed oscillation control register (DSCCTL) to 1 with VDD ≥ 2.7 V.Oscillation canbe stopped by setting the DSCON bit to 0.Note To use the 1, 8, or 20 MHz internal high-speed oscillation clock, use the option byte to set the frequency in advance (for details, see CHAPTER 25 OPTION BYTE). Also, the internal high-speed oscillator automatically starts oscillating after reset release. To use the 20 MHz internal high-speed oscillator to operate the microcontroller, oscillation is started by setting bit 0 (DSCON) of the 20 MHz internal high-speed oscillation control register (DSCCTL) to 1.An external main system clock (fEX = 2 to 20 MHz) can also be supplied from the EXCLK/X2/P122 pin. An externalmain system clock input can be disabled by executing the STOP instruction or setting of the MSTOP bit.As the main system clock, a high-speed system clock (X1 clock or external main system clock) or internal highspeedoscillation clock can be selected by setting of the MCM0 bit (bit 4 of the system clock control register (CKC)).(2) Subsystem clockNoteX T1 clock oscillatorThis circuit oscillates a clock of fSUB = 32.768 kHz by connecting a 32.768 kHz resonator to XT1 and XT2.Oscillation can be stopped by setting the XTSTOP bit (bit 6 of the clock operation status control register (CSC)).Note The 78K0R/KC3-L (40-pin) doesn’t have the subsystem clock.Remark fX: X1 clock oscillation frequencyfIH: Internal high-speed oscillation clock frequencyfIH20: 20 MHz internal high-speed oscillation clock frequencyfEX: External main system clock frequencyfSUB: Subsystem clock frequency78K0R/Kx3-L CHAPTER 7 CLOCK GENERATORR01UH0106EJ0400 Rev.4.00 339Mar 31, 2011(3) Internal low-speed oscillation clock (clock dedicated to watchdog timer)I nternal low-speed oscillatorThis circuit oscillates a clock of fIL = 30 kHz (TYP.).The internal low-speed oscillation clock cannot be used as the CPU clock. The only hardware that operates withthe internal low-speed oscillation clock is the watchdog timer.Oscillation is stopped when the watchdog timer stops.Remarks 1. fIL: Internal low-speed oscillation clock frequency2. The watchdog timer stops in the following cases.W hen bit 4 (WDTON) of an option byte (000C0H) = 0I f the HALT or STOP instruction is executed when bit 4 (WDTON) of an option byte (000C0H) = 1 andbit 0 (WDSTBYON) = 0.。
倒车雷达毕业设计开题报告
2. 本人对课题任务书提出的任务要求及实现预期目标的可行性分析任务要求:自行独立的完成系统的设计要求,能够熟练掌握设计的原理并绘制出系统原理框图,设计并完成系统完整的电路原理图及系统PCB版图,完成整个设计的任务书。
预计实现的功能有:(1) 应该有距离显示、声音/语音报警、区域警示和方位指示、探头自动检测等。
(2) 从探测范围、准确性、显示稳定性和捕捉目标速度来考虑,要求测得准、测得稳、范围宽和捕捉速度快。
(3) 其质量和可靠性应有比较高的要求,尤其是探头的质量直接关系到倒车雷达所应起的作用,特别是产品的灵敏度、是否存在盲区、温度要求下的产品是否正常工作等。
(4) 考虑显示器和探头安装后是否美观,与车是否协调。
可行性分析:倒车雷达目前尚无技术标准,因此,只要能够克服技术上的困难,其可行性比较高。
目前主要存在的技术问题是倒车雷达探测声波波束较窄,当障碍物偏离探头的正对角度时,存在较大的探测盲区。
对管锥状障碍物探测存在较多的死角。
另外,探测低矮的障碍物也比较困难。
但经过我们的分析讨论和相关资料的查阅研究,市场上还是有很多的相关器件可以达到预期的设计目标,相信经过精心的设计,该系统的全部功能基本上都能实现。
3. 本课题需要重点研究的问题及解决的思路重点研究问题:经过认真的讨论和分析,在这次的设计任务中,主要研究的问题有:倒车雷达探头、报警距离、报警音量、显示精度、显示距离、测量误差、角度、电源功率、工作温度范围等方面,其中对于倒车雷达型号及相关参数的选择将直接影响整个系统的精度,因此显得尤为重要,其次,对于报警距离、误差及探头感应角度的研究也是本次设计重点研究的问题,这些都将是产品最重要的性能,此外,显示及功耗等相关问题也不容忽视,在进一步的设计中会逐步完善。
解决的思路:在倒车时,倒车雷达会自动启动,并在智能控制器的控制下,由装置于车尾保险杠上的探头发送超声波信号,当遇到障碍物时,产生回波信号,探头接收到回波信号后经控制器进行数据处理并计算出车体与障碍物之间的实际距离,然后通过显示或语音设备提示给驾驶员。
超声波倒车雷达系统设计开题报告

表3:银川能源学院届本科毕业设计(论文)开题报告学院(部):专业:图一、超声波倒车雷达系统结构图二、研究的主要方法超声波是频率高于20KHZ 的声波,具有指向性强,能量消耗缓慢,在介质中传播的距离较远的特点,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在液位、井深、管道长度的测量、移动机器人定位和避障等领域得到了广泛的应用。
基于此,本次设计尝试使用STC89C51与HY-SRF05模块来实现超声波的测量,结合外围电路模块实现距离显示及语音播报构成超声波测距系统。
本次超声波测距系统由单片机计时及控制电路、超声波发射接收模块、测量距离显示电路、蜂鸣报警电路等部分组成。
详细介绍了超声波测距模块及STC89C51单片机的测距原理。
以HY-SRF05超声波测距模块为核心实现超声波的发射与接收。
整体电路结构简单,成本低廉,工作稳定,测量精度也达到实际应用要求。
系统基本为了达到预期的目标,实现了既定的功能。
系统采用STC89C51单片机,充分利用了其丰富的片上资源使得系统功能丰富,使用的外围芯片减少,提高了系统可靠性。
主要研究方法包括:1、根据文献资料了解国内超声波传感器的研究现状,理解各种测距原理,了解超声波的相关知识。
2、完成了系统的总体设计以及硬件电路设计。
在远距离测量时,驱动功率相对不够。
测量距离较近,测量距离较大时,显示的数据就会有较大的误差,如何进行调试。
3、完成了超声波测距雷达软件设计,并且调试通过,基本实现了系统的设计目标,最终完成程序烧S T C 8 9 C 5 1 蜂鸣报警 LCD1602显示系统超声波HY -SRF05温度传感器按键注:可附页。
倒车雷达开题报告

毕业设计(论文)开题报告课题名称超声波倒车雷达的设计与开发系部电院专业汽车电子专业班级T783-4学号54姓名鲁其克指导教师梁玉红2 0 1 1年3 月 14 日一、课题来源倒车雷达(Car Reversing Aid Systems)的全称是“倒车防撞雷达”,也称“泊车辅助装置”,在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时倒车雷达就成了汽车的好助手。
倒车雷达是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。
因此提出了基于超声波测距的汽车用倒车雷达系统的设计。
二、国内外现状最早出现倒车雷达是在20年前,严格而言,他们不属于雷达(无线电波)的产品。
以最早出现的类似装置来讲,它是利用红外线的发射与接收的原理而做出的“倒车雷达”。
最大的缺点是红外线波易受干扰,整个系统的警示音常呈现不稳定的乱鸣状态。
而且对深黑色粗糙表面物体的反应也较差。
更糟糕的是,无论是红外线发射器或接收器,只要任何一方让一层薄薄的冰雪或泥土覆盖,系统就会失效。
最近在欧美又出现了一种电磁感应的倒车雷达。
在一线路套上上一环型的感应圈,以感应车后物体的有无。
此种装置价格中等,并且完全隐密,算是一种好产品,但可惜的是,安装困难(必须卸下保险杠贴在内测),而且只能探测动态物品,当车在后退时,可探测到物体,但车一旦停止再启动后,此装置并不会告知驾驶者后方有物品贴在保险杠,此车不能再后退等。
因此,实用性也相当有限。
日本美国和欧洲等大国的大汽车公司都投入了相当多的人力和物力,采用先进的毫米波雷达,CCD摄像机,GPS和高档微机等制成安全预警系统,使用在其所开发的高级汽车上。
随着科技的日新月异,人们对车辆的功能及行车安全的期望日益增多。
因此近年来许多先进安全系统及驾驶辅助系统相继被开发出来。
超声波测距倒车雷达系统的设计【开题报告】

毕业设计开题报告电子信息工程超声波测距倒车雷达系统的设计一、选题的背景、意义随着经济的飞速发展的进程,作为交通运输的车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
在享受汽车给我们带来的便利同时,由于倒车而产生的问题也日益突出。
车的数量逐年增加,公路、街道、停车场和车库拥挤不堪,可转动的空间越来越少;另一方面,新司机及非专职司机越来越多,因倒车引起的纠纷越来越多,车辆之间、车辆与人、车辆与墙壁等障碍物之间的碰撞时有发生。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率。
在2006年汽车事故的发生比例中,倒车引起的事故占28%,倒车已成为令人们头痛的一项任务,即使是经验丰富的司机也在抱怨倒车是件费力费神的事。
据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可分别减少追尾事故的30%,路面相关事故的50%,迎面撞车事故的60%。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,可将车快速准确地停放到指定的位置。
因此,提出了基于超声波测距的汽车用倒车雷达的设计。
汽车倒车雷达全称为“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车和起动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发出超声波,然后通过反射回来的超声波来判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
只不过由于倒车雷达体积大小及实用性的限制,目前其主要功能仅为判断障碍物与车的距离,并做出提示。
汽车倒车雷达实训报告
一、实训背景随着汽车数量的不断增多,停车难、倒车难的问题日益凸显。
为提高驾驶安全性,降低交通事故发生率,汽车倒车雷达作为一种重要的辅助装置,在汽车行业得到了广泛应用。
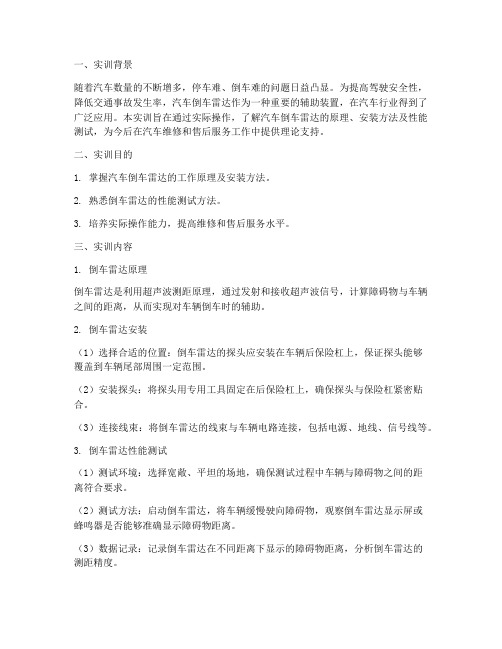
本实训旨在通过实际操作,了解汽车倒车雷达的原理、安装方法及性能测试,为今后在汽车维修和售后服务工作中提供理论支持。
二、实训目的1. 掌握汽车倒车雷达的工作原理及安装方法。
2. 熟悉倒车雷达的性能测试方法。
3. 培养实际操作能力,提高维修和售后服务水平。
三、实训内容1. 倒车雷达原理倒车雷达是利用超声波测距原理,通过发射和接收超声波信号,计算障碍物与车辆之间的距离,从而实现对车辆倒车时的辅助。
2. 倒车雷达安装(1)选择合适的位置:倒车雷达的探头应安装在车辆后保险杠上,保证探头能够覆盖到车辆尾部周围一定范围。
(2)安装探头:将探头用专用工具固定在后保险杠上,确保探头与保险杠紧密贴合。
(3)连接线束:将倒车雷达的线束与车辆电路连接,包括电源、地线、信号线等。
3. 倒车雷达性能测试(1)测试环境:选择宽敞、平坦的场地,确保测试过程中车辆与障碍物之间的距离符合要求。
(2)测试方法:启动倒车雷达,将车辆缓慢驶向障碍物,观察倒车雷达显示屏或蜂鸣器是否能够准确显示障碍物距离。
(3)数据记录:记录倒车雷达在不同距离下显示的障碍物距离,分析倒车雷达的测距精度。
四、实训结果与分析1. 倒车雷达原理分析倒车雷达采用超声波测距原理,通过发射和接收超声波信号,计算障碍物与车辆之间的距离。
当超声波遇到障碍物时,会产生回波信号,传感器接收到回波信号后,根据信号往返时间计算出障碍物距离。
2. 倒车雷达安装分析倒车雷达的安装位置、线束连接等环节对倒车雷达的性能有很大影响。
安装时应注意以下几点:(1)选择合适的位置:探头应安装在车辆后保险杠上,确保探头能够覆盖到车辆尾部周围一定范围。
(2)安装牢固:确保探头与保险杠紧密贴合,防止在行驶过程中出现松动。
(3)连接线束:确保线束连接牢固,避免因连接不良导致倒车雷达无法正常工作。
【测控技术与仪器专业毕业设计 文献综述 开题报告】基于超声波的汽车倒车防撞报警系统软件设计

【测控技术与仪器专业毕业设计+文献综述+开题报告】基于超声波的汽车倒车防撞报警系统软件设计〔20_ _届〕本科毕业设计基于超声波的汽车倒车防撞报警系统软件设计摘要随着经济的开展,汽车的数量也在大幅攀升。
停车场越来越拥挤,车辆在倒车时,因后视镜的盲区较大,驾驶员的视野受到了限制,并且由于受到光线照明度影响〔夜间时尤为突出〕,所以碰撞事故时有发生。
因此,本文将详细介绍一种超声波测距系统及汽车倒车防撞测距报警器的软件设计。
利用超声波对色彩、光照度的不敏感,可工作于比拟恶劣的环境,且超声波传感器具有结构简单、体积小、本钱低等优点。
设计以单片机为控制核心,能在汽车倒车时自动检测并显示车尾与最近障碍物之间的距离,当到达平安极限距离时,会发出声光报警,使司机及早采取行动,防止车辆相撞事故的发生。
关键词:超声波,单片机,测距,防撞报警The Software Design of Anti-collision Alarm system for Auto Reversing Based on ultrasonicAbstractWith the rapid development of economy of our country , the automobile quantity climbs in the first mate. In the more and more crowded parking lot, when reversing the vehicle, because of the larger blind area of rearview mirror, driver's field of vision is restricted, and the effects due to light illumination when especially at night , so collisions occur. Therefore, this article will detail an ultrasonic ranging system and collision distance vehicle reversing alarm software design .Using ultrasound on the color, light, non-sensitive, can work in relatively harsh environments, and ultrasonic sensor has a simple structure, small size and low cost. Design of a microcontroller as the control center can automatically detect when the car reversing and displays the rear distance between the nearest obstacle, when it reaches the limit of safety distance, audible and visual alarm, the driver of early action to avoid collision of vehicles Accidents.Keywords: Ultrasonic, Microcontroller, Distance-measurement, Impact-proof alarm目录摘要IIIAbstract IV1 引言 11.1课题的来源、意义11.2相关研究的最新成果及动态 21.2.1 超声波传感器的研究现状 21.2.2 倒车雷达的研究现状 21.3课题研究的主要内容 52超声波倒车防撞报警系统的总体设计与各组成单元 6 2.1 超声波倒车雷达的工作原理与总体设计 62.2 发射接收电路 62.2.1 发射电路 62.2.2 接收电路72.3 显示报警电路 72.3.1 系统显示电路72.3.2 系统声光报警电路 72.4 单片机复位电路72.5 时钟电路72.6 稳压电路82.7 系统主要参数考虑82.7.1 声速 82.7.2 测量盲区83系统硬件设计说明103.1单片机硬件介绍103.1.1 单片机AT89C51介绍103.2 LM567 103.3 探头UCM介绍 114系统软件设计124.1 超声波传播时间的算法设计 124.2 主程序 134.3 超声波发生子程序154.4 超声波接收中断程序 164.5 显示子程序184.6 蜂鸣报警子程序195系统误差分析及改良215.1 误差产生原因分析215.1.1 环境对测量的影响 215.1.2 量化误差215.1.3 触发误差215.1.4 LM567工作时产生的误差215.1.5 超声波波束对探测目标的入射角的影响 22 5.2 针对误差产生原因的系统改良方案 22结论 23参考文献24 致谢 25附录 261 引言1.1课题的来源、意义随着经济的开展,人们的生活水平越来越高。
车载倒车雷达装置的设计开题报告

(3)实现实时显示和智能报警机制,要确保功能的实现。
难点:
(1)如何选用合适的超声波传感器,即实现测量范围和测量精度又降低成本;
(2)如何实现实时显示和智能报警机制;
(3)如何实现合理的编写单片机程序,使整个系统稳定地工作。
2.准备情况(查阅过的文献资料及调研情况、现有设备、实验条件等)
[16]Y. Zhang, W. Hu and Y. Rong et al. Graph-based set-up planning and tolerance decomposition for computer-aided fixture design. International Journal of Production Research [J], 2001, 39(14): 31093126.
[15]Hong-Chao Zhang and Enhao Lin. A hybrid-graph approach for automated setup planning in CAPP. Robotics and Computer Integrated Manufacturing [J], 1999, 15: 89100.
倒车雷达是汽车泊车时的安全辅助装置,能以声音警示和距离显示的方式提醒驾驶员后方障碍物的情况,解除驾驶员泊车和起动车辆时前后左右探视的困扰。倒车雷达常用的实现方式是超声波测距方式的倒车雷达,也称为超声波倒车雷达系统。超声波倒车雷达由超声波传感器探头、电脑微处理器、警报和显示设备等部分组成。能够实时显示距离障碍物的距离或在障碍物进入报警范围内时进行声音报警,随时随地地告知驾驶员周围障碍物的情况,提高驾驶的安全性。
凌阳SPCE061A超声波倒车雷达开题报告

中国地质大学(武汉)机械与电子信息学院电子信息工程系毕业设计开题报告学生姓名:刘培权指导老师:胡志敏开题时间:2011年02月29日课题名称超声波倒车雷达撰写提纲:1)研究意义及背景;2)拟采用的方案;3)拟解决的主要问题一、研究意义及背景随着社会经济发展,汽车逐渐普及进入寻常百姓家庭,行车安全也成了各个车主最关心的问题。
驾驶员在行车过程中,需要密切关注路况及周围障碍,后视镜虽然给了驾驶员很大的帮助,但还是存在一定的视野死角,在泊车时这个问题表现得尤为突出。
为弥补这一缺陷,加装倒车雷达成了许多车主的选择。
倒车雷达,可以使泊车更轻松。
倒车雷达又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况。
超声波倒车雷达,采用超声波测距原理,一般由超声波传感器、控制器和显示器等部分组成。
驾驶者在倒车时,启动倒车雷达,在控制器的控制下,由装置于车尾的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,从面使驾驶者倒车时做到心中有数,使倒车变得轻松自如。
二、拟采用的方案1、方案概述选用spec061A单片机,利用其具备的单芯片语音功能,串接三个超声波测距模组,组成一个超声波测距倒车雷达系统。
2、设计要求:a)可以语音提示0.35-1.5m范围内的障碍物;b)利用3个LED二极管表示三个传感器范围是否有障碍物,障碍物越近,LED闪烁频率越高。
3、技术方案a)硬件设计:系统以spec061A单片机为核心,选用凌阳科技教育推广中心的spec061A 精简开发板,三个超声波测距模组依次排布,组成线阵的传感器阵列;另外,接有一块CD4052模拟开关制作的转接板,发光二极管显示模块。
系统组成如图:b)软件设计:根据系统工作的主要流程是在不断地对三组超声波沿距模组进行测距操作,并将第次测距的结果进行处理,心更新对就的LED显示频率设置,心及在符合要求的条件下进行语音提示播报,系统主程序流程图如下所示:程序运行时,系统先调用初始化函数,初始化系统设置及超声波测距设置,再调用测距函数进行一次测距操作,函数返回测量结果。
汽车倒车测距仪设计【开题报告】

开题报告通信工程汽车倒车测距仪设计一、课题研究意义及现状汽车倒车测距仪主要作用是在倒车时,驾驶员无需回头便可知车后有无障碍物,凭听觉判断车后障碍物离车辆距离的远近,使停车和倒车更容易,更安全。
该仪器成为驾驶员的好帮手,可有效的减少和避免那些视野不好的大型汽车的倒车交通事故,另外特别适用于夜间辅助倒车。
本设计性能优良,对提高我国汽车工业实际水平具有较大的意义。
随着经济条件的不断提升,人们的生活水平也不断提高。
基本上每家都会有一辆自己的小汽车,然而不是每家人都有很好的驾车技术。
这样交通事故发生的频率也在增加。
为了避免追尾事故,减少事故伤害,汽车自身必须有安装配置方面的设备。
随之,汽车后视系统也应运而生了。
大部分驾驶员都会希望自己倒车的时候后面有个后视眼。
这样就可以减少很多不必要的麻烦,使倒车停车显得更加方便。
近些年出现的汽车倒车测距仪都比较先进,融合了多种技术,例如:可视图像的添加可以使驾驶员更明确的看到汽车后部的状况,交通和事故记录功能的添加可以使驾驶员手动启动摄像头,记录下倒车全过程并且保存下来。
还有很多这样的先进功能使驾驶员在倒车的时候更加安全。
超声波汽车倒车探测器,种类繁多,应用广泛,目前在市场上呈现了一种各种档次并存,高低搭配的局面。
因为它实用性强,技术成熟,所以发展很快。
从第一代经过短短几年时间便发展到第五代,从纯电路模式到使用高速处理器;从单纯轰鸣器报警到显示器显示,语音报警。
另外安装使用更加方便,精度及稳定性也有极大提高。
在现实生活中的作用越来越大。
本课题所设计的汽车倒车测距仪是利用单片机作为控制和协调的中心,结合超声波测距仪的原理实现。
通过这一次的设计,可以使我所学的知识能得到综合应用,具有学以致用的作用,对于提高自身能力具有很好的意义。
二、课题研究的主要内容和预期目标本课题研究的主要内容是设计汽车倒车测距仪。
该倒车测距仪的基本工作原理是利用C8051F控制器起到数据处理,控制中心和协调作用,结合超声波测距仪的原理实现。
倒车雷达实训报告

一、实训背景随着汽车保有量的不断增加,停车难、倒车难的问题日益凸显。
倒车雷达作为一种汽车辅助安全装置,能够在倒车过程中为驾驶员提供精确的障碍物距离信息,极大地提高了倒车的安全性。
本次实训旨在通过学习倒车雷达的原理、组装与调试,加深对汽车电子技术的理解,提高动手实践能力。
二、实训目标1. 了解倒车雷达的工作原理及组成。
2. 掌握倒车雷达的组装方法。
3. 学会调试倒车雷达,使其能够准确测量障碍物距离。
4. 熟悉汽车电子技术的基本应用。
三、实训内容1. 倒车雷达原理倒车雷达利用超声波的回声定位原理进行工作。
当倒车雷达发射超声波时,超声波遇到障碍物后会反射回来,通过测量超声波往返时间,可以计算出车体与障碍物之间的距离。
2. 倒车雷达组成倒车雷达主要由以下部分组成:(1)超声波传感器:用于发射和接收超声波信号。
(2)控制器:负责处理超声波信号,计算距离,并控制报警装置。
(3)报警装置:根据距离的远近发出不同频率的报警声。
(4)显示屏:显示障碍物距离信息。
3. 倒车雷达组装(1)根据电路图连接各个元器件。
(2)将超声波传感器固定在车尾。
(3)将控制器、报警装置和显示屏安装在车内。
(4)连接电源线。
4. 倒车雷达调试(1)调整超声波传感器与车尾的距离。
(2)调整报警装置的灵敏度。
(3)检查显示屏显示的障碍物距离信息是否准确。
四、实训过程1. 理论学习首先,通过查阅资料,了解倒车雷达的工作原理、组成及组装方法。
2. 组装按照电路图,将各个元器件连接起来,注意焊接质量。
3. 调试调整超声波传感器与车尾的距离,使倒车雷达能够准确测量障碍物距离。
调整报警装置的灵敏度,使报警声在适当的距离响起。
检查显示屏显示的障碍物距离信息是否准确。
4. 测试将倒车雷达安装在汽车上,进行实际测试。
观察倒车雷达是否能够准确测量障碍物距离,并发出报警声。
五、实训结果通过本次实训,掌握了倒车雷达的组装、调试及测试方法。
倒车雷达能够准确测量障碍物距离,并发出报警声,提高了倒车的安全性。
汽车倒车测距仪毕业设计开题报告

沈阳工业大学本科生毕业设计(论文)开题报告毕业设计题目:汽车倒车测距仪的研究学院:信息科学与工程学院专业班级:电子信息工程XX班学生姓名:XXX指导教师:XXX2012年3月20日汽车倒车测距仪的研究一、课题研究的目的和意义随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越为人们所关注。
由于倒车后视镜有死角,驾车者目测距离有误差,视线模糊等原因,倒车事故发生的频率远大于汽车前进时的事故率。
倒车事故不仅会对自己的车和他人财物造成损伤如果伤及儿童更是不堪设想。
有鉴于此,汽车产品家族中,专为倒车泊车而设计的“倒车测距仪”应运而生。
经过调查,绝大部分非职业汽车驾驶员都希望有一种能发现汽车尾部障碍物的“后视眼”。
倒车测距仪的加装可以解决驾驶人员的后顾之忧,大大降低倒车事故的发生。
倒车测距仪是一个由单片机控制的汽车泊车安全辅助装置。
该测距仪讲单片机的实时控制及数据处理功能,与超声波的测距技术、传感器技术相结合,能够测量并显示车辆后部障碍物里车辆的距离,同时用间歇的“嘟嘟”声发出警报,“嘟嘟”声间隙随障碍物距离的缩小而缩短,驾驶员不但可以直接观察到显示的距离,还可以凭听觉判断车后障碍物离车辆的远近,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并可以帮助驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶的安全性。
本文介绍了一种基于单片机的超声波测距倒车辅助系统,该系统可以精确测得车尾与障碍物的距离,指导司机安全倒车。
二、课题研究的主要任务和预期目标1.主要任务及要求设计一个微机控制的汽车倒车测距仪,能测量并显示车辆后部障碍物离车辆的距离,同时用间歇的“嘟嘟”声发出警报,“嘟嘟”声间隙随障碍物距离缩短而缩短,驾驶员不但可以直接观察到检测的距离,还可以凭听觉判断车后障碍物离车辆距离的远近。
需完成以下内容:(1)确定设计方案;(2)选择合适的测距方法;(3)根据系统的设计要求,选择合适型号的芯片及元器件;(4)设计以单片机为核心的控制程序;(5)电路板及其结构的设计;(6)进行系统的调试,完成最终的设计。
基于超声波的汽车倒车防撞报警系统硬件设计【开题报告】

毕业设计开题报告测控技术与仪器基于超声波的汽车倒车防撞报警系统硬件设计1选题的背景、意义随着我国汽车产业的发展和人民生活水平的不断提高,越来越多的家庭拥有自己的汽车,在享受汽车给我带来便利的同时,一方面汽车的数量逐年增加,公路,街道,停车场和车库拥挤不堪,可转动的空间越来越少,另一方面,新司机非专职司机越来越多,由于倒车而产生的问题也日益突出,倒车引起的纠纷也越来越多。
倒车时,车辆之间,车辆与人之间,车辆与墙壁等障碍物之间的碰撞时有发生,在2002年的车辆事故发生的比例中,倒车引起的事故占21%,到2006年,倒车引起的事故比例占28%,到2008年甚至达到了30%。
倒车已成为一项令人头痛的任务,即使是经验丰富的老司机也在抱怨倒车是一件费力费神的事。
汽车倒车时,由于驾驶员看不见后面的物体和人,往往会引发事故。
由于在视觉盲区,无法看清楚身后的障碍物,司机倒车时很容易刮伤汽车,甚至发生事故,当倒车进入停车场指定泊位时,如果撞到石块或桩基,常常会将车后的消音器,后车灯和后车箱撞坏。
倒车是一个复杂的任务。
他依赖于驾驶员的驾驶经验,驾驶技巧以及反应灵敏程度。
任一环节出现错误都会导致驾驶员无法快速准确的完成倒车任务。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性能提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,解决汽车倒车中存在的困难。
解决汽车的倒车难题目前有两种思路,一是寄希望于汽车自动驾驶技术及其配套设施的日益成熟,目前这项技术仍处于研制开发阶段,短期内尚未能开发应用,第二,据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可减少倒车事故的30%。
所以用简单的汽车倒车预警系统,亦能很大程度地解决倒车难题,但是传统的汽车倒车预警系统的功能简单,驾驶员仍然需要通过后视镜去判断车后的物体,以及通过估计汽车和车后障碍物的距离来完成倒车任务。
为了减少因此带来的损失,需要有一种专门的辅助装置帮助司机可以安全的完成倒车任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浙江理工大学本科毕业设计(论文)开题报告
倒车雷达预警
严团
(09自动化2班 B09330224)
1选题的背景与意义
随着科技的发展,人们对汽车安全与舒适性的要求越来越高。
为了提高汽车的安全性,汽车生产过程中常给汽车装上倒车雷达,使得汽车的安全性大为提高。
目前,国内外的高档汽车几乎都装有倒车雷达,并且倒车雷达的应用也正逐渐在汽车行业普及[1]。
1.1超声波倒车雷达定义
超声波倒车雷达也叫“倒车防撞雷达”,是汽车在停车或者倒车时的辅助设备,由超声波传感器(俗称探头)、电脑微处理器和显示设备等部分组成。
能显示距离障碍物的距离或发出报警声,告知驾驶员周围障碍物的情况,提高驾驶的安全[4]。
1.2 国内外的研究现状
近十年内,国内外研究人员主要研究超声波回波信号的处理方法,新型超声波换能器、超声波发射脉冲选取等方面做了大量的研究,并针对超声波的干扰提出了各种解决方法,这些方法使得超声波的测量距离精度大大提高,对应的应用领域汽车倒车雷达也进行了各项改进,使得汽车的安全性能大幅提高。
目前汽车的倒车雷达的高端应用领域是自动泊车系统,倒车雷达结合倒车摄像系统,倒车时车后的视野直观的显示在汽车的仪表盘上,让倒车变得更容易[10]。
2 研究的基本内容与拟解决的主要问题
2.1 基本内容
本次毕业设计中主要完成的内容包括
1)超声波倒车雷达的原理分析与设计
超声波发射与接收的原理,超声波发射与接收的外围电路以及外围电路与单片机的接口处理。
2)超声波的发射与接收电路调试与装配
在确定正式电路之前必须对超声波的发射与接收系统进行调试,并不断的改进,找出误差的所在,确定最优方案,最后进行硬件装配。
3)距离测量与报警
单片机对超声波接收端的接收的数据进行处理,并转换成距离进行显示。
并可以设定安全距离,当测量得的距离低于安全距离时进行报警。
2.2 拟解决的主要问题 1.超声波传播的速度不恒定
超声波在介质中的传播速度随周围环境的变化而变化,其中温度的影响最为明显。
常温下,超声波的传播速度为340m/s ,温度每升高1℃,声速增加约为0.6m/s [8]。
2. 回波信号幅值随传播距离增大呈指数规律衰减[5]
回波信号幅值随传播距离增大呈指数规律衰减,使得接收传感器接收到的回波信号随着测量距离的增大而大幅减小,给回波前沿的准确定位带来困难,造成测量精度降低[6]。
3. 盲区
发射超声波时,超声波换能器在驱动脉冲结束后,会由于惯性继续振动,产生余振[9]。
余振期间,由于无法区分回波信号与余振信号,因此必须等余振停止或衰减到足够小后,才能允许接收传感器接受信号。
这段时间由于无法检测超声波传播距离,从而出现盲区[7]。
3 研究思路方案、可行性分析及预期成果
3.1 研究思路方案 3.1.1 系统结构:
图1 系统框图
本系统主要由倒车雷达信号发射器、倒车雷达信号接收器、单片机、数码管显示、电源蜂鸣器报警这六个部分组成。
其工作原理是单片机发出短暂的
40kHz
信号,经放大后通过超
声波换能器输出;反射后的超声波经超声波换能器作为系统的输入,锁相环对此信号锁定,产生锁定信号启动单片机中断程序,读出时间t,再由系统软件对其进行计算、判别后,相应的计算结果被送至LED数码管进行显示。
3.1.2 硬件方案:
3.1.2.1主控芯片选择
主控芯片选择STC89C52RC,STC89C52RC是51单片机内核,共32个I/O口,可以满足我们对I/O口的要求,它可以采用电脑的串口烧写程序,无须另外购买程序烧写器,节约成本。
3.1.2.2发射电路设计
单片机I\O的驱动能力有限,发出40KHz信号若不进行功率放大,则传输的距离不远,所以我们选用集成芯片74HC04,该芯片内部包含6个非门,每个非门的输出电流(负载能力)是一定的。
两个并联,输出电流加倍,驱动能力翻倍,最大功率输出为60mW,满足我们对功率放大部分的要求。
3.1.2.3接收电路设计
由于接收到的信号比较弱,必须加一个放大电路,对进号进行放大,我们选择CX20106A对信号进行放大,CX 20106A集成电路对接收探头受到的信号进行放大、滤波。
其总放大增益80db,满足我们的设计要求。
3.1.2.4 显示电路
用4位共阳数码管显示汽车距离障碍物是多少米。
3.1.2.5 报警电路
当测量的值超出设定的范围时,蜂鸣器发出报警声。
3.2 可行性分析
超声波倒车雷达是一个综合系统,单片机发出超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波, 从而测出发射和接收回波的时间差t,然后求出距离。
本课题涉及单片机软硬件以及传感器应用等方面的知识,在设计此系统时,必须要有扎实的单片机理论与传感器知识。
我们在前面的课程学习中,已经学习了51单片机,传感器应用等方面的课程,还学习了模拟电子线路,数字电子线路等课程,通过上网查询相关的资料,已经对超声波倒车雷达原理有了初步的了解。
本次设计中要用到的单片机和各种芯片都是我们非常熟悉的,而对于倒车雷达的设计,有历年的各种设计可以参考。
本设计的研究方法思路经过深思熟虑,切实可行,能够确保毕业设计的顺利完成并取得预期的研究成果。
3.3 预期研究成果
设计出硬件系统,可以发出40KHz的超声波信号,接收电路可以接收到发出的超声波信号,并可以转化为数字量,送到单片机进行处理,单片机对收到的数据处理,在数码管上显示出来,通过按键可以修改设定的安全距离。
4 研究工作计划
参考文献
[1] 彭翠云,赵广耀,戎海龙.汽车倒车系统中超声波测距模块的设计[M].压电与声光,2008; 30
[2]刘升平,王剑,葛红.超声波测距系统的开发与研究[M].计算机工程与应用,2009,45(25);
78-81
[3]高飞燕.基于单片机的超声波测距系统的设计[M].信息技术,2005,29(7) 128-129.
[4]仇成群,胡天云.基于超声波的汽车防撞报警系统的设计[N].传感技术学报,2009,31-32
[5] Yang Yichun, MaChizhou. Algorithm study of fast and accurate time-delay estimation
with fine interpolation of correlation peak[J] Acta Acustica 2003,28
[6] 汪恩军,等.车辙检测中超声测距数据采集方法[N].武汉理工大学学报,2008,30(1)
[7] QangLi Zhang, Y, P, Zheng, G.Gain.Flatness Consideration on the Ultra-Wideband
Low-Noise Amplifier Design [S] IEEE Trans,2005,6
[8] 童峰,许肖梅,许天增.基于遗传算法的超声LMS自适应时延估计[S].应用声学,2000,69.
[9] 马志敏,等.一种自动抑制超声测量盲区的方法[M].声学技术,2005,24(1)126-127
[10] 金元郁,张海鹰.超声波自主探路车探测方法的改进[M].传感器与仪器仪表,2009,(1)
209-211。