完整版Photoscan教程
第八讲PHOTOSCAN软件操作培训

四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
三、稀疏点云重建
稀疏点云重建之后,我们可以大体上看到重建场景的样貌,其中红色部 分代表的是相机空间矩阵,主要是方便检查校验相机信息,被红色部分包围 的就是重建目标,可以看出,房屋的主体轮廓和纹理信息已经基本成型红色 部分之外的点云是一同被恢复出的场景信息,虽然是我们不需要的东西,而 且在拍摄图像是并没有特意兼顾,但是可以发现其三维重建点云依然可以接 受可见算法的强大!通过点云编辑工具将不需要的部分删除,下一步就要开 始密集点云重建了。
六、生成三维模型
处理完后生成的三维模型如下图
七、导出三维模型
在导出模型时选择.obi格式,利用Smart3D浏览器打开。
Photoscan软件操作步骤
1、打开photoscan软件,然后点击“菜单栏”--“工作流程”--“添加照片”
2、“菜单栏”--“工作流程”--“对齐照片” 此处“成对预选”选择“已禁用” 精度:越高越好,处理时间越长
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
PhotoScan初学者1.0.0版
PhotoScan初学者1.0.0版
教程(初级级):
基于Agisoft PhotoScan1.0.0版三维模型重建
PhotoScan 准备
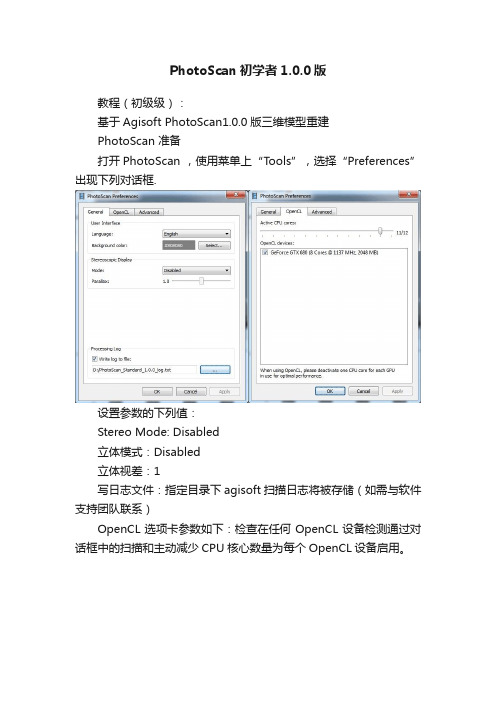
打开PhotoScan ,使用菜单上“Tools”,选择“Preferences”出现下列对话框.
设置参数的下列值:
Stereo Mode: Disabled
立体模式:Disabled
立体视差:1
写日志文件:指定目录下agisoft扫描日志将被存储(如需与软件支持团队联系)
OpenCL选项卡参数如下:检查在任何OpenCL设备检测通过对话框中的扫描和主动减少CPU核心数量为每个OpenCL设备启用。
设置高级选项卡中的参数的下列值:项目压缩级别: 6
保持深度图/存储图像的路径:disabled
绝对禁用程序启动时检查更新:Enabled
启用启用VBO支持:Disabled
Photoscan集群建模详细教程
Photoscan集群建模详细教程目录1添加照片 (2)2导入POS (2)3导入控制点 (4)4刺控制点 (4)5集群设置 (6)5.1设置共享目录 (6)5.2网络设置 (7)5.3服务器设置 (8)5.4处理节点设置 (8)6提交集群处理任务 (9)7数据导出 (11)7.1空三成果导入contextcapture进行三维重建 (11)7.2导出三维模型 (13)1添加照片单击菜单栏,工作流程→添加照片或添加文件夹,进行照片导入。
2导入POS点击参考界面,导入Pos文件格式(照片号需要带后缀名)选择对应的坐标系,列属性对应好。
Items选择相机。
3导入控制点导入控制点方法跟导pos方法一样,只是Items选择标记。
4刺控制点选择要刺点的照片,双击打开,右键place marker选择控制点点号。
精确刺点鼠标放到小旗下方,白点变红(左图),按住鼠标左键不放(如右图),进行控制点调整。
根据控制点点之记文件,将控制点精准的刺到影像上。
其他影像上以此方法进行刺点,将所有控制点刺到相片上。
5集群设置5.1设置共享目录5.2网络设置设置主机的ip地址,数据的共享目录,保存工程,必须在共享目录内,格式为psx。
5.3服务器设置运行CMDCD C:\Program Files\Agisoft\PhotoScan Prophotoscan--server--control192.168.1.143--dispatch192.168.1.143--root R:\PHOTOSCAN\可以将以上两行代码,写到txt文件里,然后后缀名改成.bat,双击运行5.4处理节点设置CD C:\Program Files\Agisoft\PhotoScan Prophotoscan--node--dispatch192.168.1.143--root\\192.168.1.143\r\PHOTOSCAN可以将以上两行代码,写到txt文件里,然后后缀名改成.bat,双击运行6提交集群处理任务工作流程→批量处理生成三维模型,只需要到生成纹理这一步,需要生产DEM、DOM产品可以选择接着往下进行。
Photoscan使用说明书
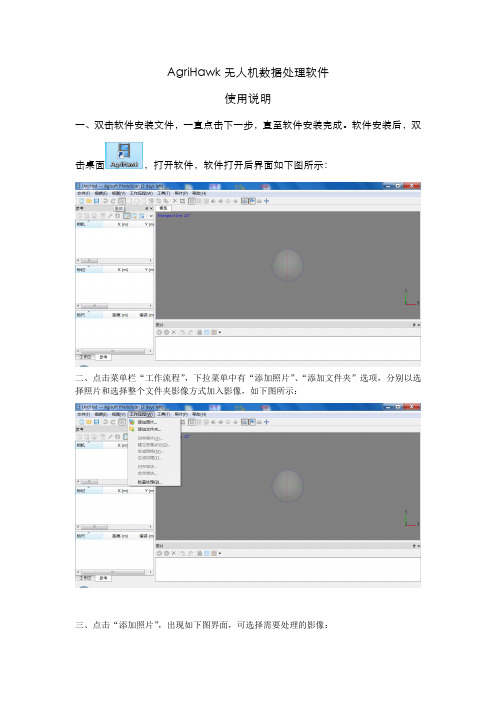
AgriHawk无人机数据处理软件使用说明一、双击软件安装文件,一直点击下一步,直至软件安装完成。
软件安装后,双击桌面,打开软件,软件打开后界面如下图所示:二、点击菜单栏“工作流程”,下拉菜单中有“添加照片”、“添加文件夹”选项,分别以选择照片和选择整个文件夹影像方式加入影像,如下图所示:三、点击“添加照片”,出现如下图界面,可选择需要处理的影像:四、选择影像后,在左侧会出现影像名列表,软件下侧会显示影像缩略图:五、双击每个缩略图,主窗口显示该张影像的大图,可以查看影像:六、如果有POS数据,点击左侧窗口“参考”栏中第一个图表,导入POS数据,若没有POS 数据可直接跳至步骤十一(POS数据为拍摄每张影像所对应的无人机位置、姿态参数,辅助拼接,拼接后的影像将具有地理坐标信息):七、点击“导入”后,弹出POS导入窗口,如下图,选择整理好的POS文档即可:八、POS导入后,选择“WGS84”坐标系统,并将各列数据与表头名称对应:九、对应好的POS界面如下图所示:十、POS数据导入后,界面中将显示POS轨迹,即无人机拍摄照片时所处空间位置:十一、点击“工作流程-对齐照片”:十二、在弹出的对话框中,精度选择“高”,成对预选选择“参考”,点击确定:十三、下图自动开始“对齐照片”处理,界面如下图,此过程只需等待,无需操作:十四、处理完成后,会生成三维点云数据,如下图所示:十五、“对齐照片”完成后,点击“工作流程-建立密集点云”:十六、在弹出的对话框中,选择所需要的质量,如下图,质量设置越高,处理速度越慢:十七,点击确定后,系统自动处理,并显示处理进度:十八、处理完成后,生成密集点云数据:十九、选择“工作流程-生成网格”,如下图:二十、在弹出的对话框中选择所需要的质量,点击确定,出现以下进度显示界面:二十一、处理完成后,生成测区光滑曲面:二十二、点击“文件-导出正射影像-导出JPEG/TIFF/PNG”,导出拼接后影像:二十三、在弹出的界面中,直接默认设置即可,点击“导出”:二十四、点击“导出”后,选择导出路径及导出文件名:二十五、点击确定后,开始导出,等待完成后,即可到相应路径下,查看拼接后正射影像。
(完整版)Photoscan教程
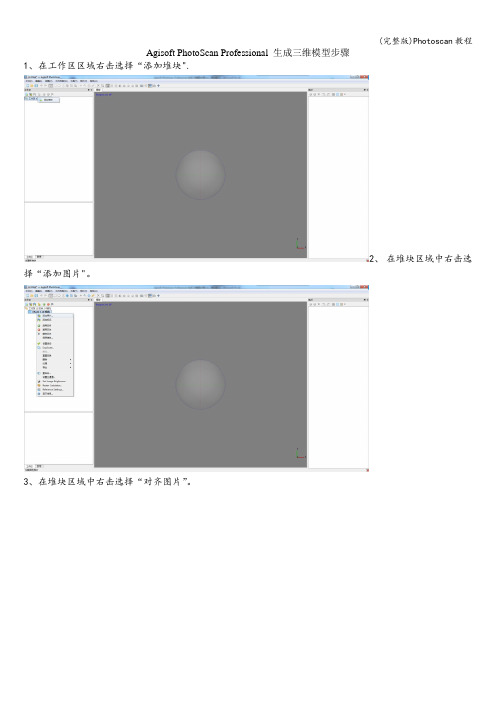
Agisoft PhotoScan Professional 生成三维模型步骤
1、在工作区区域右击选择“添加堆块".
2、在堆块区域中右击选择“添加图片"。
3、在堆块区域中右击选择“对齐图片”。
注意:成对预选必须选择已禁用
4、在堆块区域中右击选择“优化对齐方式”(可以不操作)。
建议:“拟合k4”打钩
5、在堆块区域中右击选择“生成密集点云"。
注意:在生成密集点云前,必须调整区域大小大于物体摸。
点击“调整区域大小",可以进行区域调整,质量要求越高处理时间越长。
6、在堆块区域中右击选择“生成网络”。
注意:表面类型选任意,源数据选密集点云7、在堆块区域中右击选择“生成纹理"。
8、在文件菜单栏选择“导出模型”。
注意:模型输出格式为obj。
Photoscan工作流程
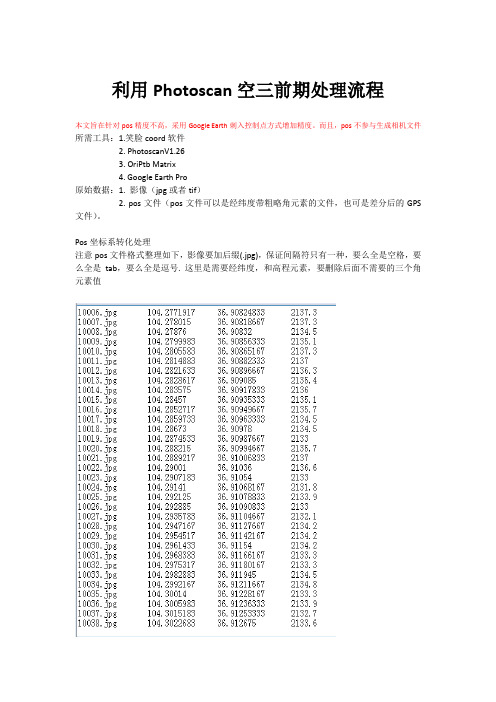
利用Photoscan空三前期处理流程本文旨在针对pos精度不高,采用Google Earth刺入控制点方式增加精度。
而且,pos不参与生成相机文件所需工具:1.笑脸coord软件2. PhotoscanV1.263. OriPtb Matrix4. Google Earth Pro原始数据:1. 影像(jpg或者tif)2. pos文件(pos文件可以是经纬度带粗略角元素的文件,也可是差分后的GPS 文件)。
Pos坐标系转化处理注意pos文件格式整理如下,影像要加后缀(.jpg),保证间隔符只有一种,要么全是空格,要么全是tab,要么全是逗号. 这里是需要经纬度,和高程元素,要删除后面不需要的三个角元素值这里我们需要将pos 大地坐标转化为平面坐标具体操作如下1.打开笑脸coord软件,设置-地图投影-2. 在投影设置里,选择高斯六度带,中央子午线设置105,其他保持不变3.点击文件转化,选择文件格式:点号经度纬度如果没有,点自定义格式设置,然后设置依次设置名称,扩展名,分隔符号,数据列表如下完成点击新建4.导入需要转换的pos文件,进行转化修改得到文件扩展名为.txt进行下一步正式处理处理流程:1. 打开photoscan,工作流-添加照片2. 在参考(reference)窗口选择导入,导入pos文件3. 选择好间隔符后,检查下X和Y值没有搞混,X为6位或8位,Y是7位,点确定4. 在主窗口界面可以浏览pos点概况5. 工作流-对齐照片,精度推荐用Low(速度快,普通和高匹配速度太慢),如果导入过pos 文件,下面可以选择参考(reference)模式,高级设置里的关键点限制和连接点限制最多不要超过默认值的2倍,也就是80000和2000。
6.检查对齐照片精度,精度小于5m说明Pos精度比较好,可以用于产生相机文件,这里由于精度不高,错误值比较大,此时采取不导入pos,产生相机文件7.当第6步中的错误有超过5的(accurac为默认的10.0情况下),则不能依据POS文件来输出自检校的相机文件。
PHOTOSCAN软件操作培训

四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
Photoscห้องสมุดไป่ตู้n软件操作
三维模型重建
一、导入图片到Photoscan
这一步需要注意,对于存在有明显拍摄缺陷的图像(如虚焦、曝光过 度),要事先剔除掉。
二、对齐图片
这一步主要进行相机的标定以及稀疏重建。由于Photoscan对使用者封装了 其中的计算过程,只留了三个参数供选择。实际使用中一般只需要设置决定 计算的精确性,有高中低三个选项,精度越高计算速度越慢只要计算机硬件 性能足够,一般选择高(High);第二项成对预选(Pair preselection)一 定要选择禁止(Disabled)。图4-2:选好选项后,点击ok,计算机就开始进 行分析和重建了,一般从几分钟到几十分钟不等。
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
6、“菜单栏”--“工作流程”--“生成纹理”
七、此时已经生成了三维模型。通过菜单栏--“文件”--“导出模型”。
photoscan使用步骤
学习PhotoScan使用报告
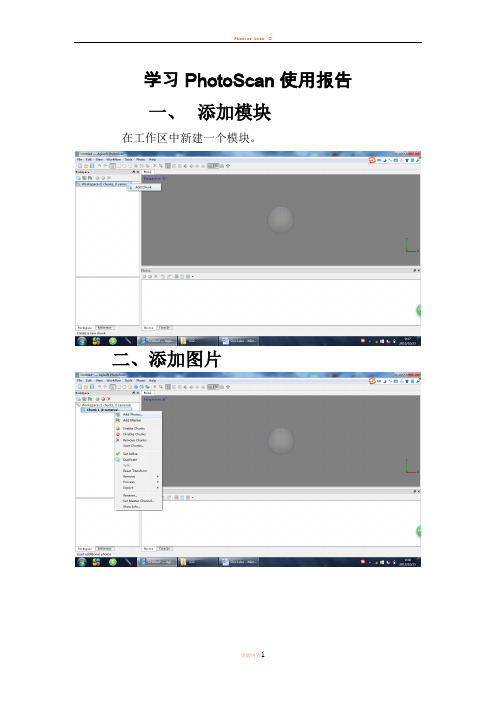
一、添加模块
在工作区中新建一个模块。
二、添加图片
三、对齐图片
注意:成对预选必须选择已禁用。
四、优化对齐方式
注意:拟合4K选项打钩。
五、生成密集点云
注意:在生成密集点云前,必须调整区域大小大于物体摸型。
点击“调整区域大小”,可以进行区域调整。
调整好区域后,依据电脑配置选择中等数量的点云。
六、生成网络
注意:表面类型选任意,源数据选密集点云
内存不够,于是在安全模式下进行网络生成。
七、生成纹理
由于并未拍摄石碑俯视照片,所以生成的石碑模型顶部有远处的树木遮挡。
PhotoScan处理无人机航拍照片基本流程(中文版)

【注】若不需要出三维模型,该步可跳过。
Export导出
Build DEM创建DEM,
Export DEM导出DEM;
Build Orthomosaic生成正射,
Orthomosaic seamlines editing正射镶嵌编辑,
Export Orthomosaic导出正射。
De点marker和/或比例尺scalebar
1)若需要更高的测量精度或者无pos的照片建立的工程需要进行地理处理或空间量测,就需要添加marker控制点标记,并配置相应的坐标系 。
若在拍照时放置了软件打印的人工标记(ToolsMarkersPrintmarkers),则可自动检测标记(Tools→Markers→Detectmarkers),然后对应标记名称 导入控制点实测数据。
Photos照片窗口右键菜单Estimateimagequality…评估全部照片质量,在保证重叠度的前提下将Quality质量小于0.8的照片Remove删除掉;
根据实际需要,可用工具栏上的蒙版设置工具 对照片上目标对象的干扰背景区域设置mask蒙版;
AlignPhotos
对齐照片
Accuracy精度:High高(使用照片的原始尺寸计算)。
BuildMesh
创建TIN模型
Surfacetype:Heightfield,
Sourcedata:Dense cloud,
Face count:High(1/5点云数),
其余默认。
BuildTexture
模型纹理贴图
Texturesize/count:8000×2(若要导出Adobe3Dpdf格式,第一个数size不能大于9000,可增加第二个数num提高贴图分辨率),
Photoscan专业版1

Photoscan专业版11. 简介Photoscan专业版是一款功能强大的照片测量软件,可以将照片转化为3D模型。
本操作指南将介绍软件的基本操作步骤。
2. 安装和启动请按照安装包中的说明进行软件的安装。
完成安装后,双击桌面上的Photoscan图标来启动软件。
3. 导入照片点击软件界面上的"导入"按钮,选择需要转化为3D模型的照片文件夹。
可以一次导入多个文件夹。
点击"导入"按钮后,软件将自动加载照片。
4. 设置对齐参数在导入照片后,点击软件界面上的"对齐"按钮。
在对齐参数设置中,可以选择不同的对齐精度和匹配点数量。
根据实际需求进行调整。
5. 进行对齐操作点击"对齐"按钮后,软件将自动进行照片对齐操作。
根据照片数量和对齐参数的设定,操作时间可能会有所不同。
请耐心等待操作完成。
6. 生成稠密点云对齐操作完成后,点击软件界面上的"建模"按钮。
在建模参数设置中,可以选择不同的稠密点云参数。
根据实际需求进行调整。
7. 生成3D模型点击"建模"按钮后,软件将开始生成稠密点云,并最终生成3D模型。
生成过程可能需要一段时间,请耐心等待。
8. 导出结果完成模型生成后,点击软件界面上的"导出"按钮,选择导出的格式和路径,然后点击"导出"按钮。
软件将把模型导出到指定的文件夹中。
9. 完成至此,您已经学会了使用Photoscan专业版1.4进行照片转化为3D模型的基本操作。
如需了解更多高级功能和技巧,请参考软件的用户手册。
请记住,本文档只提供了基本操作指南,并不涉及复杂的法律问题。
如有需要,请自行查阅相关法律文件。
无人机后期航片拼接软件PhotoScan详细使用教程

无人机后期航片拼接软件PhotoScan详细使用教程无人机后期航片拼接软件PhotoScan详细使用教程摘要:本文主要介绍一款无人机航片后期处理软件——Agisoft Photoscan,手把手教你完成航片正射影像拼接、生成DEM。
PhotoScan是一款基于影像自动生成高质量三维模型的软件。
使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。
无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。
整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。
PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM 模型。
使用控制点可达5cm精度。
完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。
航片拼接软件有很多,之前我们使用过Pix4D、Global mapper、EasyUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan的表现都要好于其他几款。
Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。
对电脑硬件的依赖也比其他要低。
很多人在用的Pix4DMapper是瑞士一家公司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。
PhotoScan优势盘点:支持倾斜影像、多源影像、多光谱影像的自动空三处理支持多航高、多分辨率影像等各类影像的自动空三处理具有影像掩模添加、畸变去除等功能能够顺利处理非常规的航线数据或包含航摄漏洞的数据支持多核、多线程CPU运算,支持CPU加速运算支持数据分块拆分处理,高效快速地处理大数据操作简单,容易掌握处理速度快不足:缺少正射影像编辑修改功能缺少点云环境下量测功能功能介绍:1.软件安装(安装大概15分钟)官网下载软件,安装。
photoscan空三操作流程
photoscan空三操作流程
Photoscan是一款专业的三维建模软件,可以通过照片生成高质量的三维模型。
在进行Photoscan空三操作流程时,需要按照一定的步骤进行操作,下面将详细介绍Photoscan空三操作流程。
首先,打开Photoscan软件并导入照片。
在导入照片时,可以选择单张照片或者整个文件夹,Photoscan会自动识别照片中的特征点,并进行匹配。
接下来,进行对齐操作。
在对齐操作中,Photoscan会根据照片中的特征点自动对齐照片,生成一个初始的三维模型。
可以通过调整参数来优化对齐效果。
然后,进行建模操作。
在建模操作中,可以选择不同的建模算法和参数,生成不同精度的三维模型。
可以通过添加控制点和地面控制点来提高建模精度。
接着,进行纹理贴图操作。
在纹理贴图操作中,可以选择不同的纹理贴图算法和参数,生成高质量的纹理贴图。
可以调整纹理贴图的亮度、对比度和饱和度。
最后,进行导出操作。
在导出操作中,可以选择不同的文件格式和参数,导出三维模型和纹理贴图。
可以选择导出为OBJ、FBX、STL等格式,以便在其他软件中使用。
总的来说,Photoscan空三操作流程包括导入照片、对齐、建模、纹理贴图和导出五个步骤。
通过按照以上步骤进行操作,可以生成高质量的三维模型,并应用于不同领域的项目中。
Photoscan 的操作流程相对简单,但需要一定的技术和经验才能达到理想的效果。
希望以上介绍对您有所帮助。
Photoscan教程

Agisoft PhotoScan Professional 生成三维模型步骤1、在工作区区域右击选择“添加堆块”.
2、在堆块区域中右击选择“添加图片”。
3、在堆块区域中右击选择“对齐图片”。
注意:成对预选必须选择已禁用
4、在堆块区域中右击选择“优化对齐方式”(可以不操作).
建议:“拟合k4”打钩
5、在堆块区域中右击选择“生成密集点云”。
注意:在生成密集点云前,必须调整区域大小大于物体摸。
点击“调整区域大小",可以进行区域调整,质量要求越高处理时间越长.
6、在堆块区域中右击选择“生成网络”。
注意:表面类型选任意,源数据选密集点云7、在堆块区域中右击选择“生成纹理”.
8、在文件菜单栏选择“导出模型"。
注意:模型输出格式为obj。
PhotoScan教程一生成正射影像和DEM(很全面详细的教程)
概述Agisoft PhotoScan 专业版允许从一组具有相应参考信息的重叠图像中生成地理参考密集点云,纹理多边形模型,数字高程模型和正射影像。
本教程描述了DEM / 正射影像生成工作流程的主要处理步骤,用于一组没有地面控制点的图像。
PhotoScan首选项使用工具菜单中的相应命令打开PhotoScan首选项对话框:在“常规”选项卡上为参数设置以下值:立体声模式:浮雕(如果您的图形卡支持四路缓冲立体声,请使用硬件)立体视差:1.0将日志写入文件:指定将存储Agisoft PhotoScan日志的目录(如果需要联系软件支持团队)在GPU选项卡中设置参数如下:在对话框中检查由PhotoScan检测到的任何GPU设备。
使用少于两个GPU时检查“使用CPU”选项。
在“高级”选项卡上为参数设置以下值:项目压缩级别:6保留深度图:启用存储绝对图像路径:禁用检查程序启动时的更新:启用启用VBO支持:启用添加照片要添加照片,请从工作流菜单中选择添加照片...命令或单击位于工作空间工具栏上的添加照片按钮。
在添加照片对话框中浏览源文件夹并选择要处理的文件。
点击打开按钮。
加载相机位置在这一步,将来模型的坐标系使用相机位置进行设置。
注意:如果相机位置未知,则可跳过此步骤。
然而,对齐照片程序在这种情况下需要更多时间。
使用“查看”菜单中的相应命令打开“参考”窗格。
单击参考窗格工具栏上的导入按钮,然后在打开对话框中选择包含摄像头位置信息的文件。
最简单的方法是加载简单的由字符分隔的文件(* .txt,* .csv),该文件包含每个摄像头位置的x坐标和y坐标以及高度(摄像机方向数据,即俯仰角,俯仰角和偏航角值)也可以导入,但数据不是强制性的参考模型)。
在“导入CSV”对话框中,根据文件的结构指示分隔符,然后选择要从其开始加载的行。
请注意,#字符表示在对行进行编号时不计数的注释行。
通过在对话框的列部分设置正确的列号,为程序指示在每列中指定了什么参数。
photoscan无人机使用手册
photoscan无人机使用手册这是一份关于使用Photoscan无人机的详细手册。
本文档旨在为用户提供使用Photoscan无人机的详细指南和操作步骤。
请按照以下章节逐步进行操作。
1、准备工作1.1 确保无人机和遥控器电池已充好电。
1.2 确保相机设备已安装并正确连接到无人机上。
1.3 检查无人机和相机设备是否安装最新的软件和固件版本。
2、启动无人机2.1 打开无人机电源开关。
2.2 检查遥控器与无人机的连接状态。
2.3 保持无人机在开阔的空地上启动。
3、飞行前检查3.1 检查无人机的各个部件是否正常运作,如电机、螺旋桨等。
3.2 检查摄像头设备的稳定性。
3.3 调整相机设备的角度和视野。
4、飞行操作4.1 使用遥控器将无人机升至预定高度。
4.2 使用无人机操控器进行飞行导航和拍摄。
4.3 在飞行过程中保持无人机平稳和稳定。
4.4 按照预定的航线进行拍摄。
5、数据传输和处理5.1 将拍摄的数据传输到电脑或存储设备上。
5.2 使用Photoscan软件进行图像处理和拼接。
5.3 导出处理后的图像和地图数据。
6、故障排除6.1 如果无人机遇到异常情况或故障,立即停止飞行。
6.2 检查无人机和相机设备的连接状态和电池寿命。
6.3 参考无人机和Photoscan软件的故障排除指南。
7、安全注意事项7.1 在飞行过程中遵守本地的无人机飞行规定和法律。
7.2 不要在需要特殊许可的区域飞行。
7.3 在飞行过程中保持周围环境的安全。
附件:- 无人机和相机设备的操作手册- Photoscan软件的使用指南法律名词及注释:- 无人机:指无人驾驶的航空器,包括其附件和相关设备。
- 飞行规定:指监管无人机飞行活动的相关法律和规定。
- 特殊许可区域:指需要特殊许可才能飞行的区域,如机场、军事基地等。
感谢您使用本文档,希望可以帮助您顺利使用Photoscan无人机。
如有任何疑问或需要进一步帮助,请参考附件中的操作手册或联系我们的客服人员。
无人机后期航片拼接软件PhotoScan详细使用教程

无人机后期航片拼接软件PhotoScan详细使用教程摘要:本文主要介绍一款无人机航片后期处理软件——Agisoft Photoscan,手把手教你完成航片正射影像拼接、生成DEM。
PhotoScan是一款基于影像自动生成高质量三维模型的软件。
使用时无需设置初始值,无需相机检校,利用最新的多视图影像三维重建技术,就可以对具有影像重叠的照片进行处理,也可以通过给予的控制点生成真实坐标的三维模型。
无论是航拍影像还是高分辨率数码相机拍摄的影像都可以使用这个软件进行处理。
整个工作流程无论是影像定向还是三维模型重建过程都是完全自动化的。
PhotoScan可生成高分辨率真正射影像和带精细色彩纹理的DEM模型。
使用控制点可达5cm精度。
完全自动化的工作流程,即使非专业人员也可以在一台电脑上处理成百上千张航拍影像,生成专业级别的摄影测量数据。
航片拼接软件有很多,之前我们使用过Pix4D、Global mapper、EasyUAV、Photoscan,几款软件用下来,无论是操作流程,还是出图效果和速度,Photoscan 的表现都要好于其他几款。
Photoscan是俄罗斯的东西,正版价格4万左右,但是提供30天全功能试用。
对电脑硬件的依赖也比其他要低。
很多人在用的Pix4DMapper是瑞士一家公司的产品,功能上和Photoscan大同小异,但是正版价格可以买2套Photoscan了,而且使用下来,感觉对电脑的要求比Photoscan高不少,16G内存的电脑频频弹窗警告。
PhotoScan优势盘点:支持倾斜影像、多源影像、多光谱影像的自动空三处理支持多航高、多分辨率影像等各类影像的自动空三处理具有影像掩模添加、畸变去除等功能能够顺利处理非常规的航线数据或包含航摄漏洞的数据支持多核、多线程CPU运算,支持CPU加速运算支持数据分块拆分处理,高效快速地处理大数据操作简单,容易掌握处理速度快不足:缺少正射影像编辑修改功能缺少点云环境下量测功能功能介绍:1.软件安装(安装大概15分钟)官网下载软件,安装。
第八讲 PHOTOSCAN软件操作培训 (1)

三维模型重建
一、导入图片到Photoscan
这一步需要注意,对于存在有明显拍摄缺陷的图像(如虚焦、曝光过 度),要事先剔除掉。
二、对齐图片
这一步主要进行相机的标定以及稀疏重建。由于Photoscan对使用者封装了 其中的计算过程,只留了三个参数供选择。实际使用中一般只需要设置决定 计算的精确性,有高中低三个选项,精度越高计算速度越慢只要计算机硬件 性能足够,一般选择高(High);第二项成对预选(Pair preselection)一 定要选择禁止(Disabled)。图4-2:选好选项后,点击ok,计算机就开始进 行分析和重建了,一般从几分钟到几十分钟不等。
四、密集点云重建
这一步要对三维点云进行三角化处理。执行工作流程——网格重建。在菜单下有 三个选项需要选择, 表面类型(Surfacetype),选择任意(Arbitary),另一个 选项高度厂(Heightfield)针对的是航空图像。点云来源(Source data),这 里当然要选择密集点云(Dense cloud), 如果选择稀疏点云(Sparse cloud), 结果会比较差。多边形数量(Polygon count),根据需要选择,同样,数量越 多处理时间越长,默认给出了几种精度下的对应数量,也可以根据需要手动设置, 一般情况下,高(High)足矣。
3、“菜单栏”--“工作流程”--“建立密集点云”
4、利用选择按钮,通过“平移”、“旋转”,设置工作区
5、“菜单栏”--“工作流程”--“生成网格” 表面类型:任意 源数据:密集点云
6、“菜单栏”--“工作流程”--“生成纹理”
七、此时已经生成了三维模型。通过菜单栏--“文件”--“导出模型”。
六、生成三维模型
PhotoScan教程一生成正射影像和DEM(很全面详细的教程)
概述Agisoft PhotoScan 专业版允许从一组具有相应参考信息的重叠图像中生成地理参考密集点云,纹理多边形模型,数字高程模型和正射影像。
本教程描述了DEM / 正射影像生成工作流程的主要处理步骤,用于一组没有地面控制点的图像。
PhotoScan首选项使用工具菜单中的相应命令打开PhotoScan首选项对话框:在“常规”选项卡上为参数设置以下值:立体声模式:浮雕(如果您的图形卡支持四路缓冲立体声,请使用硬件)立体视差:1.0将日志写入文件:指定将存储Agisoft PhotoScan日志的目录(如果需要联系软件支持团队)在GPU选项卡中设置参数如下:在对话框中检查由PhotoScan检测到的任何GPU设备。
使用少于两个GPU时检查“使用CPU”选项。
在“高级”选项卡上为参数设置以下值:项目压缩级别:6保留深度图:启用存储绝对图像路径:禁用检查程序启动时的更新:启用启用VBO支持:启用添加照片要添加照片,请从工作流菜单中选择添加照片...命令或单击位于工作空间工具栏上的添加照片按钮。
在添加照片对话框中浏览源文件夹并选择要处理的文件。
点击打开按钮。
加载相机位置在这一步,将来模型的坐标系使用相机位置进行设置。
注意:如果相机位置未知,则可跳过此步骤。
然而,对齐照片程序在这种情况下需要更多时间。
使用“查看”菜单中的相应命令打开“参考”窗格。
单击参考窗格工具栏上的导入按钮,然后在打开对话框中选择包含摄像头位置信息的文件。
最简单的方法是加载简单的由字符分隔的文件(* .txt,* .csv),该文件包含每个摄像头位置的x坐标和y坐标以及高度(摄像机方向数据,即俯仰角,俯仰角和偏航角值)也可以导入,但数据不是强制性的参考模型)。
在“导入CSV”对话框中,根据文件的结构指示分隔符,然后选择要从其开始加载的行。
请注意,#字符表示在对行进行编号时不计数的注释行。
通过在对话框的列部分设置正确的列号,为程序指示在每列中指定了什么参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Agisoft PhotoScan Professional 生成三维模型步骤1在工作区区域右击选择“添加堆块”。
2、在堆块区域中右击选择“添加图片”
兀卄Wn - ■»«- kR **r -
3、在堆块区域中右击选择“对齐图
片”
注意:成对预选必须选择已禁用
4、在堆块区域中右击选择“优化对齐方式”(可以不操作)
r «PE・
> -Ml**
■r — * 7
■ *■
注意:在生成密集点云前,必须调整区域大小大于物体摸。
点击“调整区域大小” ,可以进
行区域调整,质量要求越高处理时间越长。
6、在堆块区域中右击选择“生成网络” 。
建议: “拟合 k4 ”打钩 WL ZJ2 二 4b- Wib 二 -UM M0 VW _2 > 11 W CE1
> • v A Ml ■・ u JI I h ■ T ■ Kt 尸■
5、在堆块区域中右击选择“生成密集点
云”
療一殿 质里: 咼 L
注意:表面类型选任意,源数据选密集点云7、在堆块区域中右击选择“生成纹理”
R ・ it ■ v 4 K
I' •:U・i・.
—,眉;一“
> IMh>
* Afln
'送■■hM
MM”
■M B
l»
■■
=;-
A L
8、在文件菜单栏选择“导出模型”
聖I* - £MQ *•
注意:模型输出格式为obj。