matlab实验六 SIMULINK基本用法
Matlab-Simulink基本模块操作
第2章 Simulink模块操作
表 2-2 控制模块方块图的参数
参数
定义
ScreenColor BackgroundColor
模型方块 图的背景色 模块和标 注的背景色
Fore groun dColor
模块和标 注的前景色
第2章 Simulink模块操作
用户可以把这些参数设置为如下任一值: 'black','white','red','green','blue','cyan','magenta',
第2章 Simulink模块操作
Simulink模块操作
2.1 模块操作 2.2 改变模块外观 2.3 设置模块参数 2.4 标注方块图 2.5 模块属性对话框 2.6 显示模块输出 2.7 控制和显示模块的执行顺序 2.8 查表编辑器 2.9 鼠标和键盘操作概述
第2章 Simulink模块操作
2.1 模 块 操 作
2.1.1 Simulink模块类型 用户在创建模型时必须知道,Simulink把模块分为两种
类型:非虚拟模块和虚拟模块。非虚拟模块在仿真过程中起 作用,如果用户在模型中添加或删除了一个非虚拟模块,那 么Simulink会改变模型的动作方式;相比而言,虚拟模块在 仿真过程中不起作用,它只是帮助以图形方式管理模型。此 外,有些Simulink模块在某些条件下是虚拟模块,而在其他 条件下则是非虚拟模块,这样的模块称为条件虚拟模块。表 2-1列出了Simulink中的虚拟模块和条件虚拟模块。
第2章 Simulink模块操作 图2-10
第2章 Simulink模块操作
2.2.3 指定方块图颜色 Simulink允许用户在方块图中指定任何模块或标注的前景色
matlab实验六 SIMULINK基本用法
实验六 SIMULINK 基本用法一 实验目的1. 学习SIMULINK 软件工具的使用方法;2. 用SIMULINK 仿真线性系统;二 实验内容1.SIMULINK 简介SIMULINK 是MATLAB 软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB 语言的主要区别在于,其与用户交互接口是基于Windows 的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
所谓模型化图形输入是指SIMULINK 提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl 文件进行存取),进而进行仿真与分析。
练习6-1 在SIMULINK 环境下,作T1、T2、T3系统的阶跃响应;将T1、T2、T3系统的阶跃响应图在同一Scope 中显示。
练习6-2典型二阶欠阻尼系统的传递函数为:极点位置:式中:1332122242222332221+++=+++=++=s s s T s s s T s s T )(2)(2)(22222222σωσσωωξωω++++=++=a a n n n s s s s S G aj S ωσ±-=在SIMULINK 环境下,作该系统在以下参数时的仿真:① 设ωa=1, σ=0.5,1,5 ,求阶跃响应,(用同一Scope 显示);②设σ=1 , ωa=0.5,1,5 ,求阶跃响应在(用同一Scope 显示);③设:求阶跃响应(用同一Scope 显示);④设 25,2,22,21==n ωξ0006045302==θωn )cos(;1;2θξξωωξωσ=-==n a n求阶跃响应,(用同一Scope显示);阶跃响应的时间:0≤t≤10,阶跃信号幅值为+2V。
分析参数变化(增加、减少与不变)对阶跃响应的影响。
Matlab系列之Simulink仿真教程

交互式仿真
Simulink支持交互式 仿真,用户可以在仿 真运行过程中进行实 时的分析和调试。
可扩展性
Simulink具有开放式 架构,可以与其他 MATLAB工具箱无缝 集成,从而扩展其功 能。
Simulink的应用领域
指数运算模块
用于实现信号的指数运算。
减法器
用于实现两个信号的减法 运算。
除法器
用于实现两个信号的除法 运算。
对数运算模块
用于实现信号的对数运算。
输出模块
模拟输出模块
用于将模拟信号输出 到外部设备或传感器。
数字输出模块
用于将数字信号输出 到外部设备或传感器。
频谱分析仪
用于分析信号的频谱 特性。
波形显示器
控制工程
Simulink在控制工程领域 中应用广泛,可用于设计 和分析各种控制系统。
信号处理
Simulink中的信号处理模 块可用于实现各种信号处 理算法,如滤波器设计、 频谱分析等。
通信系统
Simulink可以用于设计和 仿真通信系统,如调制解 调、信道编码等。
图像处理
Simulink中的图像处理模 块可用于实现各种图像处 理算法,如图像滤波、边 缘检测等。
用于将时域信号转换为频域信号,如傅里叶变换、 拉普拉斯变换等。
03 时域变换模块
用于将频域信号转换为时域信号,如逆傅里叶变 换、逆拉普拉斯变换等。
04
仿真过程设置
仿真时间的设置
仿真起始时间
设置仿真的起始时间,通 常为0秒。
步长模式
选择固定步长或变步长模 式,以满足不同的仿真需 求。
MATLAB第六讲simulink(2)

2.Parameters选项卡参数设置
确定被封装子系统内部变量与对话框中输入量间的 联系。 Prompt用来设置变量提示符; Variable用来设置变量名; 它们的作用是在封装子系统的参数对话框中提示用 户设置什么内容和指定变量来接受用户设置的内容。 Type下拉菜单用于指定控件类型,Edit为默认形式,接 受使用者输入的数据,若只有几个提空的选项,则用 Popup。
七、SIMULINK实现的元件级电路仿真
就仿真模型逼近被仿真系统的真实程度而言,前面 所建SIMULINK模型属于功能级仿真模型。这种模型所 使用的模块与真实的物理器件之间不存在一一对应的关 系;这种模型的构建以抽象了的数学模型为基础。较早 的SIMULINK,就是进行功能级仿真的软件环境。但最 近发布的几个SIMULINK版本,已经在某些专业领域把 仿真推进到了元器件级。
例8:利用触发子系统将一锯齿波转换为方波。
2.使能触发子系统(Enable 和trigger模块都加到子系 统中) 二者共同作用子系统执行。即只用当信号正时触发事 件发生。
6.5子系统的封装
为子系统自定义对话框和图标,使子系统有个独立 的操作界面,把子系统中的各模块参数对话框结合成 一个参数设置对话框,在使用时不必打开每个模块进 行参数设置,这样是子系统使用更加方便。
如:qh16 disp('哈哈'); port_label('input',1,'in1'); port_label('input',2,'in2'); port_label('output',1,'out1'); 显示图形命令plot(cos(0:0.1:2*pi),sin(0:0.1:2*pi))
MATLAB-Simulink的基础应用..
第3节 仿真模型的搭建方法与步骤
3.1 传感器输出特性仿真
例:已知某直流比较仪的输出特性曲线表达式为: I1=kI2+I0 式中I1和I2分别是一次电流和二次电流,I0为比较 仪的偏置系数,k为比较仪的灵敏度,已知k=114和 I0=110mA,试用Simulink绘制该比较仪的输出特性曲 线。 1. 调用功能模块 确定需要哪些功能模块,并找到所在的模块库。需 要以下模块:Ramp、Constant、Gain、sum、scope。
2
第2节 Simulink的操作方法
2.1 Simulink的运行操作
1、运行Simulink的方法 在MATLAB的命令窗口直接键入“simulink”; 利用MATLAB工具条上的Simulink快捷键图标; 在MATLAB菜单中,选择“File-New-Model” 2、打开已存在的模型文件 在MATLAB主窗口中直接键入文件名(不加扩展 名); 在MATLAB菜单中,选择“File-Open-Model” 利用MATLAB工具条上的“打开”图标。
13
4. 由功能模块组合成子系统 将现有的多个功能模块组合起来,形成新的功能模块。 例:构建下图所示的子系统
14
第4节 电力系统仿真初探
4.1 电力系统元件库简介
4.1.1 启动电力系统元件库 1. 利用指令窗口启动 在指令窗口中输入以下指令即可。 >> powerlib 2. 利用“开始”导航区启动 Start→Simulink →SimPowerSystem →Block Library 8.1.2 退出电力系统元件库 1. 单击“电力系统元件库”对话框中的File菜单,激活Exit Matlab命令即可; 2. 单击“电力系统元件库”对话框右上角上的“×”按钮即 15 可完成退出。
Simulink基本操作
Simulink基本操作(2014.5 兰交大萌芽)Simulink是MATLAB软件所带的软件仿真工具。
其强大的功能几乎可以满足所有的系统仿真。
要掌握基本的仿真操作,必须认识仿真各个模块的英文名称。
其实记住图形是干嘛的即可。
说实话在运用外语软件时,英语真是个让人头疼的问题。
不过,得必须记住的是,在任务/现实面前,只能向前迈步。
下面我们介绍Simulink的基本操作,以截图为主。
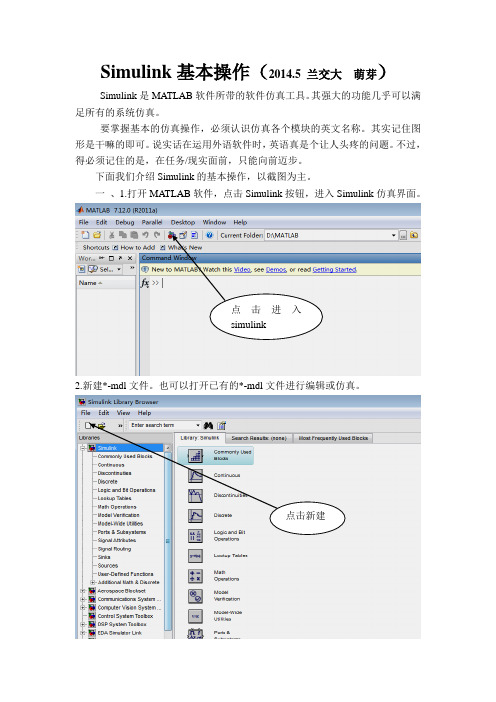
一、1.打开MATLAB软件,点击Simulink按钮,进入Simulink仿真界面。
点击进入simulink2.新建*-mdl文件。
也可以打开已有的*-mdl文件进行编辑或仿真。
点击新建3.出现*-mdl界面。
现在进可以编辑机构框图了。
4.完成后,点击运行按钮,同时保存文件位置,注意文件地址要明确。
运行按钮Simulink给我们的基本模块结构很多,都在Simulink library browser窗口中。
其中有基本模块和专业模块。
常用基本模块。
二、下面,我们举例说明其简单的使用说明。
以下图为例。
该图为计算机控制系统的最少拍有纹波控制系统。
1.首先,添加各模块,同时修改其参数值,还可以边添加连线。
2.右键点击Add to …即可添加模块到*-mdl文件中。
点击右键点击我们可以改变其位置和大小。
3.再依次添加这两个。
发现在*-mdl文件中出现以下现象,不要着急!4.这时我们可以把他们移开(点击一个,拉开,再点击一个,拉开)同时放大合适的比例。
5.修改其属性的选中模块,双击打开。
比如Sum修改点击ok 得到6.双击Mux,在option中选择signals 点击ok,得连线鼠标放在箭头处,拉动,放入入口箭头处即可。
7.题目里出现两个相同模块的,可以进行复制、粘贴。
得到两个模块后在进行属性和参数的修改8.接着进行别的模块添加工作。
9.模块添加完成。
进行属性和参数设置,得到注;为了能让大家看的清楚些,我把布局缩小了,在自己实验仿真时,完全可以放开成大窗口,将模块放大,更清晰明了,不要小家子气。
matlab实验六、SIMULINK基本用法讲解
三 SIMULINK功能模块的处理
功能模块的基本操作,包括模块的移动、复制、删除、转向、改变大 小、模块命名、颜色设定、参数设定、属性设定、模块输入输出信号 等。 模块库中的模块可以直接用鼠标进行拖曳(选中模块,按住鼠标左 键不放)而放到模型窗口中进行处理。 在模型窗口中,选中模块,则其4个角会出现黑色标记。此时可以对 模块进行以下的基本操作。 1) 移动:选中模块,按住鼠标左键将其拖曳到所需的位置即可。若要 脱离线而移动,可按住shift键,再进行拖曳。 2) 复制:选中模块,然后按住鼠标右键进行拖曳即可复制同样的一个 功能模块。 3) 删除:选中模块,按Delete键即可。若要删除多个模块,可以同时 按住Shift键,再用鼠标选中多个模块,按Delete键即可。也可以用鼠 标选取某区域,再按Delete键就可以把该区域中的所有模块和线等 全部删除。
4、Signal&Systems(信号和系统模块) sigsys.mdl
In1:输入端。 Out1:输出端。 Mux:将多个单一输入转化为一个复合输出。 Demux:将一个复合输入转化为多个单一输出。 Ground:连接到没有连接到的输入端。 Terminator:连接到没有连接到的输出端。
SubSystem:建立新的封装(Mask)功能模块
5、Sinks(接收器模块) sinks.mdl
Scope:示波器。 XY Graph:显示二维图形。 To Workspace:将输出写入MATLAB的工作空间。 To File(.mat):将输出写入数据文件。
6、Sources(输入源模块) sources.mdl
Constant:常数信号。 Clock:时钟信号。 From Workspace:来自MATLAB的工作空间。 From File(.mat):来自数据文件。 Pulse Generator:脉冲发生器。 Repeating Sequence:重复信号。 Signal Generator:信号发生器,可以产生正弦、方波、锯齿波及随 意波。 Sine Wave:正弦波信号。 Step:阶跃波信号。
控制系统仿真实验六simulink
实验六:Simulin建模与仿真一、实验目的1、掌握Simulink建模与仿真的基本方法。
2、熟悉Simulink基本模块库及主要元件的使用方法。
二、实验学时:4学时三、实验原理:1、Simulink 仿真过程在已知系统数学模型或系统框图的情况下,利用Simulink进行建模仿真的基本步骤如下。
(1)启动Simulink,打开Simulink库浏览器。
(2)建立空白模型窗口。
(3)由控制系统数学模型或结构框图建立Simulink仿真模型。
(4)设置仿真参数,运行仿真。
(5)输出仿真结果。
2、Simulink建模与仿真基本方法根据给定的数学模型或控制系统框图,可建立Simulink仿真模型。
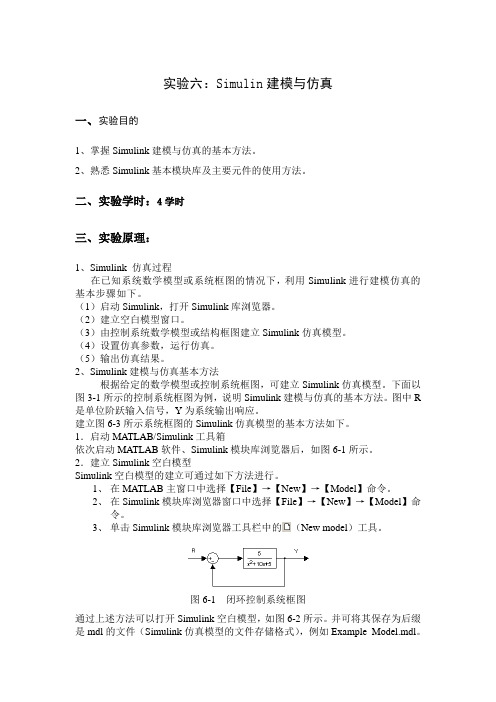
下面以图3-1所示的控制系统框图为例,说明Simulink建模与仿真的基本方法。
图中R 是单位阶跃输入信号,Y为系统输出响应。
建立图6-3所示系统框图的Simulink仿真模型的基本方法如下。
1.启动MATLAB/Simulink工具箱依次启动MATLAB软件、Simulink模块库浏览器后,如图6-1所示。
2.建立Simulink空白模型Simulink空白模型的建立可通过如下方法进行。
1、在MATLAB主窗口中选择【File】→【New】→【Model】命令。
2、在Simulink模块库浏览器窗口中选择【File】→【New】→【Model】命令。
3、单击Simulink模块库浏览器工具栏中的(New model)工具。
图6-1 闭环控制系统框图通过上述方法可以打开Simulink空白模型,如图6-2所示。
并可将其保存为后缀是mdl的文件(Simulink仿真模型的文件存储格式),例如Example_Model.mdl。
在保存Simulink模型文件的时候,为了实现向下兼容,MATLAB R2008/Simulink 7.1允许将模型保存为其他版本的Simulink模型。
图6-2 空白模型窗口3.根据系统框图选择模块构建Simulink仿真模型,首先需要知道所需模块所属的子模块库名称。
(13)Matlabsimulink使用篇
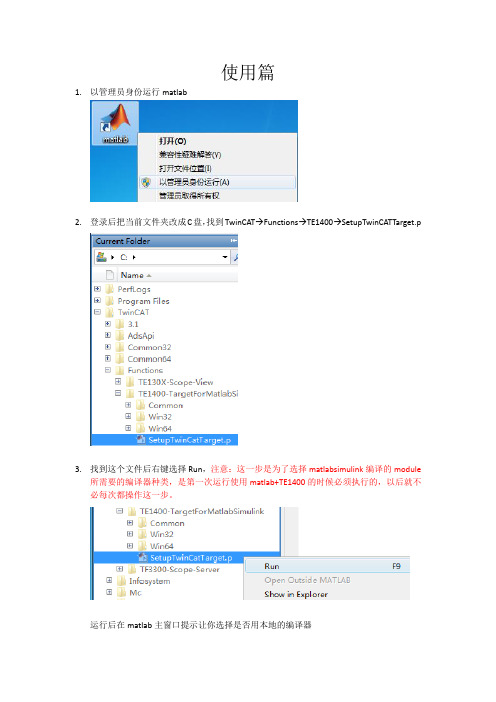
使用篇1.以管理员身份运行matlab2.登录后把当前文件夹改成C盘,找到TwinCAT→Functions→TE1400→SetupTwinCATTarget.p3.找到这个文件后右键选择Run,注意:这一步是为了选择matlabsimulink编译的module所需要的编译器种类,是第一次运行使用matlab+TE1400的时候必须执行的,以后就不必每次都操作这一步。
运行后在matlab主窗口提示让你选择是否用本地的编译器因为本地有VS2010的编译器,所以选择y后敲回车随后matlab找到本地有两种编译器,一个是matlab本体的lcc-win32 C2.4.1,另一个是VS2010,选择VS2010所代表的数字,输入2敲回车最后让matlab让你确认编译器的选择,输入y敲回车提示以下信息说明编译器选择完成4.点击工具栏中simulink图标5.弹出simulink编辑界面后,点击工具栏中的打开模型6.找到案例模型TempContrTest.mdl,点击打开7.本次案例模型是一个简单的温度控制External Setpoint是设定温度Feedback Temp是当前温度CoolerON是开关量输出8.打开simulation菜单栏,选择configuration parameters进行参数设定(1)进入参数设定后,选择右边的树形栏中的Solver,把其中的Type改成Fixed-step(2)之后选择树形栏中的Code Generation,把其中的System target file改成TwinCAT.tlc 点击Browse可以进行选择(3)继续选择树形栏中的Tc Module,在Publish module和Publish binaries for platform “TwinCAT RealTime(x86)”前打勾(4)最后选择树形栏中的Tc Advanced,把Task assignment改成Default在Add to cyclic caller,Variable cycle time,Export block digram以及Export block diagram debug information前打勾(5)以上操作完成后点击左下角的Apply(6)选择树形栏中的Code Generation,把Generate code only勾选后点击Generate code,随后matlab就开始把这个模型通过TE1400生成TC3所识别的Module了(7)回到matlab主窗口,等看到以下提示说明Module生成完成(8)我们来看下生成的Module会在什么位置可以发现在TwinCAT/3.1/CustomConfig/Modules路径下会生成名字和案例模型名字一样的文件夹TempContrTest打开可以发现里面其实主要是.tmc文件是TC3所需要的,其他都是一些描述文件,所以可以把.tmc文件拷贝出来,给一些没有Matlab的电脑上用9.打开TC3,并新建项目10.把名称改成英文,例如matlabsimulink,点击确认11.打开SYSTEM,右键TcCOM Objects添加新项12.TC3会自动找到之前生成的.tmc文件,选中后点击OK进行添加13.添加好后我们可以发现TcCOM Objects下出现matlab生成的Module,并且3个变量出现在IO位置,方便和PLC程序或者硬件IO进行变量连接14.右键Tasks添加新项名字可以改成matlab,点击OK添加新的Task15.因为我需要实施做温度计算,所以可以这个Task的优先级提高,修改成1,周期用默认的10ms即可16.双击TcCOM Objects下面的Object1(TempContrTest)Depend On改成Manual Config,并把Task分配成之前创建的名为“matlab”的Task17.右键PLC添加新项18.把名称修改为英文,例如test19.编辑一段模拟程序,模拟温度的升降20.程序写好后右键test Project,选择生成开始编译程序21.编译好后在test Instance自动生成3个变量22.接下来要做的就是把PLC中3个变量和matlab中三个变量链接起来Switch→CoolerONSP→External SetpointPV Feedback Temp23.变量链接完成后开始下传配置和程序,选择菜单栏TwinCAT,点击Activate Configuration弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态24.打开PLC菜单,选择“登录到”把程序在线25.打开PLC菜单,选择“启动”把程序运行26.观察程序,看到成功利用matlab温度算法运行程序27.打开Object1(TempContrTest),选择Block Diagram也可以同时观察Matlab温度算法实时状态注:上图中可以看到由一个红色字提示说是非商业的,虽然TE1400插件装上了,但用的还是7天试用版,所以对于试用版有一些限制,查询information system可以看到如下:TC3中Scope View简单使用在之前的基础上来看下TC3下Scope View如何使用,装好TC3后Scope View会自动集成在TC3中1.首先右键“解决方案”选择添加,点击新建项目2.选择TwinCAT Measurement中的Measurement Scope Project,名称改成英文,例如tempcontrol,点击确定3.右键Axis,选择Target Browser4.打开小电脑图标下的Port_851(851),点击MAIN5.把MAIN程序中PV和SP分别添加到同一个坐标上6.保证程序在运行后,点击工具栏中的Record开始记录两个变量7.随后就可以观察到当前PV和SP的示波图下图中绿色是PV,蓝色是SP。
MATLAB Simulink用法

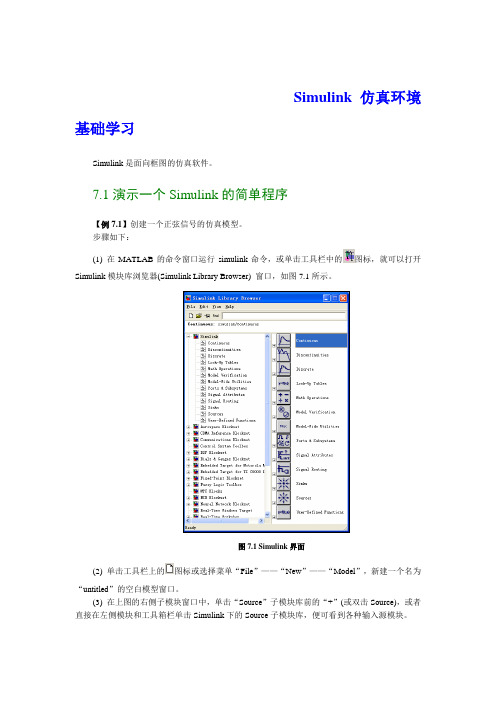
Simulink仿真环境基础学习Simulink就是面向框图的仿真软件。
7、1演示一个Simulink的简单程序【例7、1】创建一个正弦信号的仿真模型。
步骤如下:(1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图7、1所示。
图7、1 Simulink界面(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块与工具箱栏单击Simulink下的Source子模块库,便可瞧到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave ”(正弦信号),将其拖放到的空白模型窗口“untitled ”,则“Sine Wave ”模块就被添加到untitled 窗口;也可以用鼠标选中“Sine Wave ”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave ”模块添加到untitled 窗口,如图7、2所示。
(5) 用同样的方法打开接收模块库“Sinks ”,选择其中的“Scope ”模块(示波器)拖放到“untitled ”窗口中。
(6) 在“untitled ”窗口中,用鼠标指向“Sine Wave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图7、3所示。
(7) 开始仿真,单击“untitled ”模型窗口中“开始仿真”图标,或者选择菜单“Simulink ”——“Start ”,则仿真开始。
双击“Scope ”模块出现示波器显示屏,可以瞧到黄色的正弦波形。
simulink使用入门
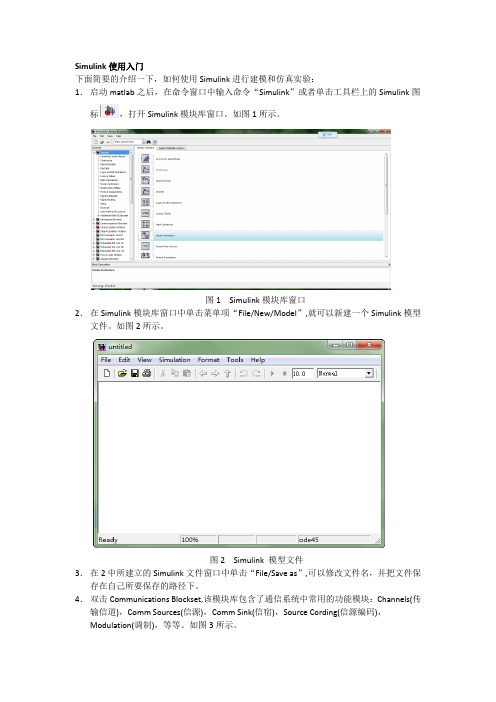
Simulink使用入门下面简要的介绍一下,如何使用Simulink进行建模和仿真实验:1.启动matlab之后,在命令窗口中输入命令“Simulink”或者单击工具栏上的Simulink图标,打开Simulink模块库窗口。
如图1所示。
图1 Simulink模块库窗口2.在Simulink模块库窗口中单击菜单项“File/New/Model”,就可以新建一个Simulink模型文件。
如图2所示。
图2 Simulink 模型文件3.在2中所建立的Simulink文件窗口中单击“File/Save as”,可以修改文件名,并把文件保存在自己所要保存的路径下。
4.双击Communications Blockset,该模块库包含了通信系统中常用的功能模块:Channels(传输信道),Comm Sources(信源),Comm Sink(信宿),Source Cording(信源编码),Modulation(调制),等等。
如图3所示。
图3 通信工具箱里的功能模块5.在Simulink基础库中找到自己需要的模块,选取该模块,直接拖动到新建模型窗口中的适当位置,或者选取该模块后,右击鼠标,“Add to…”加到所建模块窗口中。
图4中,把信号发生器放到了amn中。
图4 利用模块库建立仿真模型6.如果需要对模型模块进行参数设置和修改,只需选中模型文件中的相应模块,单击鼠标右键,选取相应的参数进行修改,或者双击鼠标左键,进行修改。
还可以在选中模块之后通过拖动鼠标来修改模块的位置、大小和形状。
7.通过快捷菜单的其它选项还可以对模型的颜色、旋转、字体、阴影等属性进行设置,也可以对模型进行接剪切、拷贝或删除。
8.模块外部的大于符号“>”分别表示信号的输入输出节点,为了连接两个模型的输入输出,可以将鼠标置于节点处,这时鼠标显示为十字,拖动鼠标到另一个模块的端口,然后释放鼠标的按钮,则形成了带箭头的连线,箭头的方向表示信号的流向。
matlab中simulink使用技巧
matlab中simulink使用技巧参加数学建模已经很多年了,算来其中所学多源于网络上各位前辈的无私奉献。
饮水当思源,承志以后继。
故而添加此分类,用于交流我这些年的心得。
心得分为软件和算法两类,软件可能会包括matlab/simulink,maple,mathematica,spss(被收购成了pasw),ansys,ansoft/maxwell,comsol,pscad,tc,算法可能有GA,NNs。
当然,受到专业研究所限,很多时候无法得心应手,献丑于此,只为提醒自己要做到更好。
恰巧,我在自己学校的bbs上申请了相关版面的版主职位,也希望自己能整理出些基础教学,以备后生晚辈们入门。
暂时的想法是,先说些simulink的相关知识,因为工科学生最常用的就是这个仿真环境,而其他软件又恰好对他保留了接口,可以说这个软件成为了算法的中心。
以后将陆续说些simulink不能完成的任务,并推荐能完成这些任务的工具。
开始吧——simulink可以视作matlab下的工具库,matlab版本不断更新,simulink也不断更新,当前版本为matlab2011b。
首先要明确,simulink的作用为求解常微分方程(组)!且这是他唯一的作用!也就是说偏微分方程在simulink中是无法求解的,需要其他工具或软件作为接口,或者你够牛的,就直接写个有限元的程序。
当然,常微分方程是不够的,为适应数字控制电路等离散系统,simulink可以求解离散的常微分方程,也就是差分方程,略微麻烦,不做重点介绍。
然后来看看simulink求解常微分方程(组)的方法,首先要把方程写成如下形式:y1'=f1(y1,y2,...yn,t)y2'=f2(y1,y2...yn,t)...yn'=fn(y1,y2...yn,t)至于如何写成这种形式,就是降阶了,线性代数里说的很多了,比如y1=y;y2=y1'=y';y3=y2'=y''...需要注意的是,等号右侧不能有导数项,如果等号右边出现了导数项,则说明这个方程需要积分一次。
Simulink使用基本

Simulink使用基本Simulink是一种功能强大的图形化建模和仿真环境,用于分析和设计控制系统。
它是MATLAB的一个扩展工具箱,提供了一种直观和可视化的方法来创建和模拟动态系统模型。
在本文中,我们将介绍Simulink的基本使用方法。
在Simulink中,模型由一个个模块组成,每个模块代表系统的一个部分,例如传感器、执行器、控制器等。
这些模块通过线缆相互连接,以传递信号和数据。
要添加模块到模型中,我们可以在库浏览器中选择合适的模块,然后将其拖动到模型窗口中。
我们还可以使用快捷键B打开库浏览器,并通过栏来快速找到需要的模块。
一旦添加了模块,我们可以使用鼠标点击模块并拖动来改变连接线的位置。
要连接两个模块,只需将鼠标从一个模块上的端口位置拖动到另一个模块上的端口位置。
另外,我们还可以使用连接线工具栏上的线条样式来自定义连接线的样式,例如线的颜色、宽度等。
在进行仿真之前,我们需要设置模型的参数。
这包括设置仿真时间、步长和求解器等。
可以在模型窗口的工具栏上找到仿真按钮,点击后将启动仿真过程。
Simulink将按照设定的时间和步长,以及模型中各模块的逻辑,模拟系统的动态行为,并生成仿真结果。
仿真结果可以在仿真数据视图中查看和分析,包括系统的输入、输出、状态变量等。
除了基本的建模和仿真功能,Simulink还提供了许多高级功能和工具,用于系统控制、优化、验证等。
例如,我们可以使用状态流程图(Stateflow)来建模系统的离散事件行为,使用原型环境(Simscape)来建模物理系统,使用代码生成工具箱来生成嵌入式代码等。
Simulink还支持与MATLAB的混合编程,可以通过MATLAB脚本和函数来调用Simulink 模型,并在Simulink模型中使用MATLAB函数。
总结起来,Simulink是一个强大的图形化建模和仿真环境,适用于各种控制系统的分析和设计。
它提供了直观和可视化的方法来创建和模拟系统模型,并提供了丰富的工具和功能来支持系统开发的各个方面。
simulink 的用法
simulink 的用法
Simulink是MATLAB的一个附加组件,主要用于建模、模拟和分析动态系统。
以下是一些Simulink的基本用法:
1.打开Simulink:在MATLAB命令窗口中输入“simulink”,然后按Enter
键。
这将打开Simulink的库浏览器。
2.创建新模型:在Simulink的库浏览器中,单击“Blank Model”,然后
双击“New Model”。
这将打开一个新的Simulink模型窗口。
3.添加模块:在Simulink模型窗口中,可以通过单击“Library Browser”
并在其中搜索和选择所需的模块来添加模块。
4.连接模块:Simulink使用线条连接模块,并用箭头表示信号流的方向。
要连接模块,只需单击并拖动从一个模块的输出端口到另一个模块的输入端口。
5.设置模块参数:选中模块后,双击可以设置模块参数。
6.运行模拟:在完成模型构建和参数设置后,可以使用Simulink的仿
真功能运行模拟。
在Simulink工具栏上单击“Run”按钮或使用命令窗口中的相应命令开始仿真。
7.查看结果:Simulink提供了多种方式来查看模拟结果,包括示波器、
信号轨迹、图表等。
可以在Simulink的工具栏上单击相应的按钮或使用命令窗口中的相应命令来添加和打开这些查看器。
以上是Simulink的一些基本用法,具体使用方法可能因版本和具体应用而有所不同。
MATLAB Simulink用法
Simulink仿真环境基础学习Simulink是面向框图的仿真软件。
7.1演示一个Simulink的简单程序【例7.1】创建一个正弦信号的仿真模型。
步骤如下:(1) 在MATLAB的命令窗口运行simulink 命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图7.1所示。
图7.1 Simulink界面(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图7.2所示。
(5) 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。
(6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图7.3所示。
(7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。
双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。
simulink 的用法

simulink 的用法
Simulink是一种图形化建模和仿真环境,用于设计、建模和仿真动态系统。
它是MATLAB软件的一部分,提供了一种直观的方法来构建和模拟各种系统,包括控制系统、通信系统、图像处理系统等。
Simulink的用法包括以下几个步骤:
1.打开Simulink:使用MATLAB软件打开Simulink工具包,或者直接在MATLAB命令窗口中输入"simulink"打开。
2.创建模型:在Simulink界面上使用不同的模块和线段,构建系统模型。
模块可以代表各种组件,如传感器、控制器、执行器等,线段则表示信号和数据流。
3.连接模块:使用适当的线段连接不同的模块,建立模型中各个组件之间的数据流和控制逻辑。
4.参数设置:对模型中的各个模块进行参数设置,以确保其行为与实际系统相符。
5.仿真运行:运行模型进行仿真,观察系统的动态行为和输出结果。
可以通过修改模型参数、调整模型结构来进一步优化和改进系统设计。
除了以上基本用法,Simulink还提供了许多高级功能,如模型验证、优化设计、代码生成等。
模型验证功能可以检测和解决模型中的错误和问题。
优化设计功能可以通过自动搜索和调整模型参数,实现系统性能的最优化。
代码生成功能可以将Simulink模型转换为C代码或其他可执行文件,以便在嵌入式系统中进行实时部署。
总的来说,Simulink提供了一种直观的图形化建模方法,将系统设计过程可视化,使得系统建模和仿真更加简单和高效。
实验六 SIMULINK仿真操作
实验六 SIMULINK 仿真操作一、 实验目的1、了解SIMULINK 仿真的意义2、实现一个简单的电路仿真二、 实验地点:A404三、实验日期:四、 实验内容(一) S IMULINK 的启动Simulink 的启动主要有以下两种方法:– 在MATLAB 的命令窗口中输入simulink,结果是在桌面上出现一个Simulink Library Browser 的窗口。
– 单击MATLAB 主窗口的快捷按钮,打开Simulink Library Browser 窗口 。
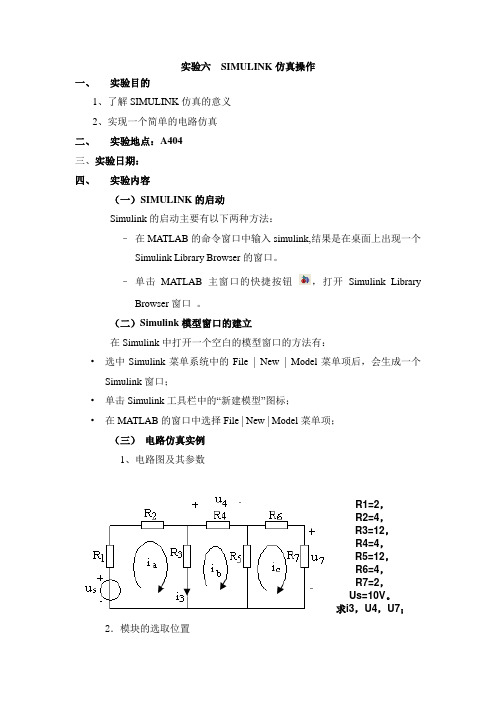
(二)Simulink 模型窗口的建立在Simulink 中打开一个空白的模型窗口的方法有:• 选中Simulink 菜单系统中的File | New | Model 菜单项后,会生成一个Simulink 窗口;• 单击Simulink 工具栏中的“新建模型”图标;• 在MATLAB 的窗口中选择File | New | Model 菜单项;(三) 电路仿真实例1、电路图及其参数2.模块的选取位置R1=2,R2=4,R3=12,R4=4,R5=12,R6=4,R7=2,Us=10V 。
求i3,U4,U7;1)、电源:simpowersystems/ electrica sources2)、接地: simpowersystems/connectors3)、元件:simpowersystems/elements/Series RLC Branch4)、测量设备:simpowersystems/measurements5)、显示设备:simulink/sinks/display3、模型的建立将与电路图中对应的模块加入到模型窗口,并正确地设置参数和连线得到如下模型:4.对仿真结果进行验证,并修改相关元件的参数再次进行验证。
简述simulink的基本操作步骤
简述simulink的基本操作步骤
simulink的基本操作步骤
一、模型创建
1、打开matlab程序,调出simulink程序界面后,点击“文件”下的“新建”选项;
2、在侧边的“Simulink Library Browser”窗口中选择需要的模块,将所需要的模块拖拽到主窗口中;
3、完成拖拽后,继续拖拽输入和输出信号量,将模块与模块之间连接,将信号量与模块连接;
4、拖拽完成后,可以编辑模块和参数设置,以构建一个完整的模型;
二、模型仿真
1、模型建立完成后,可以对模型进行仿真,点击主窗口上方的“仿真”按钮;
2、调出控制面板,设置仿真参数,如开始时间、结束时间、仿真步数或仿真步长等;
3、点击“应用”按钮,模型仿真开始;
4、仿真运行结束后,可以对模型中输入输出数据进行可视化分析;
三、模型保存
1、模型建立和仿真完成后,点击主窗口上方的“文件”按钮;
2、根据需要,点击“保存”或“另存为”,将模型另存为.mdl
文件;
3、输入文件名,点击“保存”,模型文件保存完成。
matlab实验六、SIMULINK基本用法
三、自定义功能模块的封装 exp5_7.mdl exp5_8.mdl exp5_9.mdl exp5_10.mdl
上面提到的两种方法都只是创建一个功能模块而已,如果要命名该 自定义功能模块、对功能模块进行说明、选定模块外观、设定输入 数据窗口,则需要对其进行封装处理。
首先选中Subsystem功能模块,再打开Edit菜单中的Mask Subsystem 进入mask的编辑窗口,可以看出有3个标签页。 1) Icon:设定功能模块的外观。 2) Initialization:设定输入数据窗口(Prompt List)。
d) dpoly(num,den,’z’):按z次数的降幂排序,在功能模块上显示离散的 传递函数。
用户还可以设置一些参数来控制图标的属性,这些属性在Icon页右下 端的下拉式列表中进行选择。 a) Icon frame:Visible 显示外框线;Invisible:隐藏外框线。
b) Icon Transparency:Opaque 隐藏输入输出的标签;Transparent:显示 输入输出的标签。 c) Icon Rotation:旋转模块。
3) Documentation:设计该功能模块的文字说明。
1、Icon标签页
此页最重要的部分是Drawing Commands,在该区域内可以用disp指 令设定功能模块的文字名称,用plot指令画线,用dpoly指令画转换函 数。
注意,尽管这些命令在名字上和以前讲的MATLAB函数相同,但它 们在功能上却不完全相同,因此不能随便套用以前所讲的格式。
例exp5_2.mdl
exp5_3.mdl
第四节 SIMULINK自定义功能模块
自定义功能模块有两种方法,一种方法是采用Signal&Systems 模块库 中的Subsystem功能模块,利用其编辑区设计组合新的功能模块;另一 种方法是将现有的多个功能模块组合起来,形成新的功能模块。对于 很大的SIMULINK模型,通过自定义功能模块可以简化图形,减少功 能模块的个数,有利于模型的分层构建。 一、方法1 exp5_5.mdl
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验六 SIMULINK 基本用法
一 实验目的
1. 学习SIMULINK 软件工具的使用方法;
2. 用SIMULINK 仿真线性系统;
二 实验内容
1.SIMULINK 简介
SIMULINK 是MATLAB 软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB 语言的主要区别在于,其与用户交互接口是基于Windows 的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
所谓模型化图形输入是指SIMULINK 提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl 文件进行存取),进而进行仿真与分析。
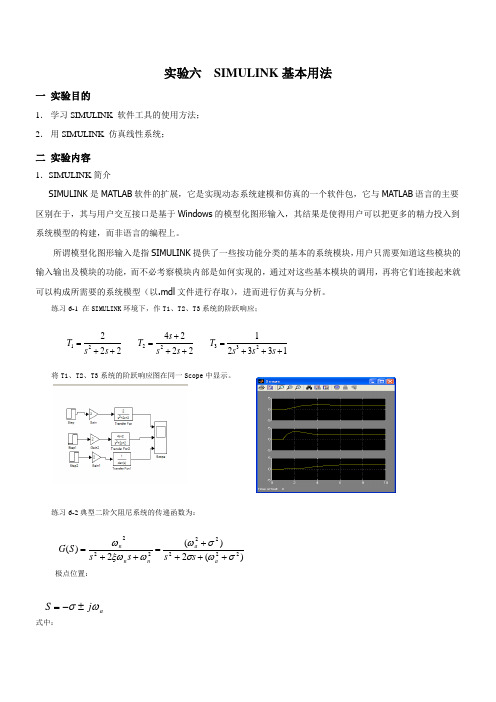
练习6-1 在SIMULINK 环境下,作T1、T2、T3系统的阶跃响应;
将T1、T2、T3系统的阶跃响应图在同一Scope 中显示。
练习6-2典型二阶欠阻尼系统的传递函数为:
极点位置:
式中:
1
332122242222332221+++=+++=++=
s s s T s s s T s s T )
(2)(2)(22222222σωσσωωξωω++++=++=a a n n n s s s s S G a
j S ωσ±-
=
在SIMULINK 环境下,作该系统在以下参数时的仿真:
① 设ωa=1, σ=0.5,1,5 ,求阶跃响应,(用同一Scope 显示);
②设σ=1 , ωa=0.5,1,5 ,求阶跃响应在(用同一Scope 显示);
③设:
求阶跃响应(用同一Scope 显示);
④设 2
5,2,2
2,
2
1=
=n ωξ0
006045302==θωn )cos(;1;2
θξξωωξωσ=-==n a n
求阶跃响应,(用同一Scope显示);
阶跃响应的时间:0≤t≤10,阶跃信号幅值为+2V。
分析参数变化(增加、减少与不变)对阶跃响应的影响。
实验七 SIMULINK 对经典控制系统的设计仿真
一 实验目的:
学习用Simulink 软件工具对经典控制系统进行仿真设计的基本方法。
二 实验内容
用Simulink 工具对下列题目进行仿真设计。
练习7-1 带有右零点或时间迟延环节的系统称为非最小相位系统。
本题是研究非最小相位零点的作用。
已
知系统的传递函数为,编写程序并仿真:
①、设n (s )=1.5,求该二阶系统阶跃响应及超调量、峰值时间、过渡过程时间;
②、设n (s )=(-s +a)/a ,a={1,3,6},求该二阶系统阶跃响应;
③、设n (s )=(s +a)/a ,a={1,3,6},求该二阶系统阶跃响应;
5
.15.0)()(2++=S S S n S
G
21)(S S G
④、分别绘制②③两项的阶跃响应图,并列表表示所得结果。
②③两项的阶跃响应图中应附有①项的阶跃响应曲线,以作比较;
⑤、基于所得的数据,试叙述在阶跃响应中左平面零点与右平面零点各自的作用是什么?
练习7-2 分析滞后与超前补偿器在不稳定系统中的补偿作用。
以双积分器为例:
其补偿器有如下三种:
Ⅰ、比例补偿器:K(S)=KC
Ⅱ、超前补偿器:K(S)=KC(S+1)/(S+5)
Ⅲ、滞后补偿器:K(S)=KC(S+5)/(S+1)
讨论: ①、在第一种情况下,系统能稳定吗?增加KC 的作用是什么?
②、在第二种情况下,系统能稳定吗?增加KC 的作用是什么?
③、在第三种情况下,系统能稳定吗?增加KC 的作用是什么?
④、设KC={0.1,0.5,1},对以上每一种情况进行仿真,求其阶跃响应,要求将这三种情况的闭环阶
跃响应绘制在同一张图中。
在每种情况中,仿真时间为{10,50,5}。
练习7-3 对典型的PID控制系统模型进行Simulink仿真,记录仿真结果。
并将阶跃输出结果和时间变量写到MA TLAB的工作空间变量t和y中,用Plot(t ,y)将仿真结果打印出来。
比较两种仿真结果。
取Kp=10,Ki=3,Kd=2
PID控制系统模型框图和Simulink仿真图见图7-1,图7-2;
图7-1 PID控制系统模型框图。