汽车电子嵌入式驱动软件结构
嵌入式系统在汽车电子领域中的应用

嵌入式系统在汽车电子领域中的应用第一章嵌入式系统的概念和概况嵌入式系统是由硬件和软件两部分构成的计算机系统,它通常被嵌入到产品中,用于控制、监控和调度等任务。
相比于普通计算机,嵌入式系统具有体积小、功耗低、可靠性高、效率高等优点,因此在各个行业领域中得到了广泛的应用。
在汽车电子领域中,嵌入式系统应用相当广泛,汽车电子产品像发动机控制、制动、座椅控制、音响、导航等需要嵌入式系统的支持才能实现。
第二章嵌入式系统在汽车电子领域中的应用2.1 汽车发动机控制系统以往的汽车发动机控制还依赖于人工调节,效果不尽如人意,而嵌入式系统可以实现准确而快速地控制,使发动机运行更稳定、更省油。
此外,嵌入式系统还可以实时监测发动机的工作状态,如果发现故障,自动进行报警并停机,从而保障了驾驶安全。
2.2 制动系统嵌入式系统可以对制动系统进行控制,在发现制动故障时,自动实现维修和调试,避免出现安全问题。
嵌入式系统还可以帮助汽车实现电子驻车功能,实现停放时车辆的牢靠。
同时,提供防抱死功能,避免在制动时车轮会卡死,发生交通事故。
2.3 音响系统现代汽车上音响系统的各种功能需要用嵌入式系统实现,通过嵌入式系统来控制音乐播放、CD机或DVD机的读取、虚拟环绕声等功能实现。
2.4 座椅控制系统嵌入式系统可以通过电脑控制汽车上座椅的运动,使乘客得到更好的乘坐体验。
在一些高端车型上,嵌入式系统甚至可以控制座椅加热或按摩,为乘客提供更高档次的乘坐体验。
2.5 导航系统嵌入式系统可以实现汽车导航系统的各种功能和导航信息的实时更新,以及在行驶过程中对路线的监控和调整。
通过嵌入式系统,导航系统还能支持语音控制,实时人机交互更加方便,实现驾车出行更加便捷。
第三章嵌入式系统在汽车电子领域中的优势3.1 体积小相比于传统计算机,嵌入式系统的体积要小得多,能够更好地嵌入到车辆的小型结构中。
这样,汽车的空间利用率更高,保留的载重和乘员位置也更多。
3.2 速度快嵌入式系统通常内置高速处理器,并进行了优化本身的源程序、算法等,比其他计算机运行更快,而且还能更好的控制汽车电子设备,让其运行更为平稳、更为可靠。
支持汽车电子的嵌入式软件编程接口库设计

≥
:
≥
萎
数 ,就 可 实 现运 算和 硬 件 操 作 。 这种 层 次 分 明 的设 计 思想 也 便 于 维护 接 口库和 移植 新 的 平 台。 关键 词 :A I P ;嵌 入 式 系 统 ;应 用 算 法 ;底 层驱 动
妻
妻
引言
近 年来 ,随着 电 子科 学 和 计 算
控 制 的 系统 平 台 。 软 件平 台 由微 型 系 统 内核 和 应
硬件操作 。
整 个 电控 系 统 包 括 硬 件 平 台 、
机 技 术 的飞 速 发 展 ,汽车 电子 设 备 用 编程 接 口库 组 成 。嵌入 式操 作 系 底 层 驱 动 、嵌 入 式 软 件 平 台 和上 层 的 应 用 越来 越 多 。 目前 ,国 内汽 车 统 内 核 负 责 任 务 调 度 及 事 件 处 理 用 户 四个 层 次 。 各 个层 次 关 系 ,如 电子 技 术水 平 跟 国外 汽车 厂 商 相 比 等 ,编 程 接 口库 负 责 将 开 发常 用 的 图 1 示 。 所 还 有 很 大差 距 ,尤其 是在 发 动 机 电 算法 和 MP 5 C5 5底层 硬 件 的驱 动 函 控 方 面 , 国 内 尚无 独 立 开 发 先 例 。 数 进 行 控 件 级 封 装 ,供 用 户调 用 。 本 文介 绍 的 柴 油机 电控 系 统 嵌入 式 在嵌 入 式系 统 中 ,开 发 人 员通 过 调
制偏 差 ,将 偏 差 的 比例 、 积 分和 微
M- J
芝
。
一
, fห้องสมุดไป่ตู้
分 通 过 线性 组 合 构 成 控 制量 ,主 要 用 于 控 制 喷 油 输 出信 号 。
嵌入式系统的驱动程序开发

嵌入式系统的驱动程序开发嵌入式系统是指集成了电子、计算机科学和软件工程等多个学科的领域,它是一种特定用途的计算机系统。
嵌入式系统通常用于工业控制、汽车电子、智能家电以及医疗设备等领域。
而嵌入式系统的驱动程序开发则是其中一个非常重要的环节,它负责控制硬件设备并与操作系统之间进行交互。
本文将从需求分析、环境搭建、开发流程和调试过程等方面详细介绍嵌入式系统的驱动程序开发。
一、需求分析在开始开发嵌入式系统的驱动程序之前,我们首先需要进行需求分析。
这一阶段的主要目标是了解系统的功能要求以及所涉及的硬件设备。
需要明确以下几个方面的内容:1. 硬件设备:对于每一个需要开发驱动程序的硬件设备,我们需要了解其型号、接口类型、通信协议等信息。
2. 功能要求:了解硬件设备在系统中所需的功能,如读取传感器数据、控制执行器、与其他设备进行通信等。
3. 性能要求:确定系统对驱动程序性能的要求,如实时性、稳定性、可扩展性等。
二、环境搭建开发嵌入式系统的驱动程序需要搭建适当的开发环境,以便编写、调试和测试程序。
以下是搭建开发环境的主要步骤:1. 选择适当的开发板:根据硬件设备的要求,选择一款适合的开发板。
开发板上通常集成了一些基本的硬件设备,可以帮助我们进行调试和测试。
2. 安装交叉编译工具链:由于嵌入式系统通常运行在不同的硬件平台上,所以我们需要使用交叉编译工具链来生成目标平台上可执行的代码。
3. 配置开发环境:根据开发板的型号和需求,配置开发环境,包括安装驱动程序、配置编译选项、设置编译器等。
三、开发流程在进行嵌入式系统的驱动程序开发时,我们通常按照以下步骤进行:1. 设计接口:定义硬件设备与驱动程序之间的接口,包括寄存器定义、函数接口等。
2. 编写初始化函数:初始化函数负责配置硬件设备的寄存器,并将其设置为适当的工作状态。
3. 编写读写函数:根据硬件设备的功能要求,编写相应的读写函数。
使用合适的通信协议与设备进行通信。
4. 实现中断处理:如果硬件设备支持中断功能,我们需要编写中断处理函数,用于处理硬件设备的中断事件。
嵌入式车载系统中的软件设计与开发

嵌入式车载系统中的软件设计与开发在现代汽车技术的快速发展中,嵌入式车载系统已经成为汽车电子化的重要组成部分。
它集成了多个功能,例如导航、娱乐、控制、监测和交互等,为驾驶者提供了更加智能化、舒适化和安全化的驾驶体验。
嵌入式车载系统的软件开发和设计是其实现的核心。
本文将从嵌入式车载系统的特点及软件开发的过程和方法入手,详细介绍它的软件设计与开发过程。
一、嵌入式车载系统的特点嵌入式车载系统是一个相对封闭的系统。
操作系统的资源非常有限,且通常没有直接可见的屏幕、鼠标和键盘等输入/输出设备。
同时,车内环境也具有一定的挑战性,例如振动、温度变化、噪音和电磁干扰等,这些因素都需要在软件设计和开发中考虑到。
另外,嵌入式车载系统还需要考虑安全问题,因为它涉及到车辆的安全和生命安全。
这意味着在软件设计和开发过程中需要遵守一系列的标准和规定,例如汽车工业标准(Automotive Industry Standard,以下简称AIS)、安全认证和可信性等级等。
这些要求可以使车载系统的软件成为高质量和高可靠性的软件。
二、软件开发过程嵌入式车载系统的软件开发需要经历多个阶段,包括需求分析、设计、开发、测试和部署等。
在这些过程中,要注意以下几个关键点。
2.1 需求分析需求分析是软件开发的第一步,它包括收集和理解驾驶者和车辆的需求。
在这个阶段,需要制定完整的需求规格说明(Requirements Specification Document,以下简称RSD),明确系统的功能、性能、可靠性、安全和用户界面等方面的要求。
此外,在需求分析中还需要考虑到汽车工业标准,以确保系统的兼容性和可靠性。
2.2 设计设计是软件开发的第二阶段,它需要将RSD转化为软件的设计方案。
在这个阶段中,需要选择正确的架构、算法和数据结构,并进行通信方案的设计。
在设计阶段,需要考虑到可靠性、稳定性和可维护性等方面。
2.3 开发在软件开发阶段,需要按照设计方案编写代码,并进行联合测试。
面向汽车电子的嵌入式软件开发应用软件的研究与分析

感谢您的观看
汇报人:XX
面向汽车电子的嵌入 式软件开发应用软件 的研究与分析 汇报人:XX
目录
添加目录标题
嵌入式软件开发概述
汽车电子系统中的嵌 入式软件开发技术
汽车电子系统中的嵌 入式软件应用实例
汽车电子系统中的嵌入式 软件开发挑战与未来发展
结论
添加章节标题
嵌入式软件开发概 述
嵌入式系统是一种专用的计算机系 统,旨在执行特定的任务或功能
编码实现: 根据设计文 档进行代码 编写
测试验证: 对软件进行 测试和验证, 确保其正确 性和稳定性
部署维护: 将软件部署 到目标平台 上,并进行 后续的维护 和升级
工业控制领域
汽车电子领域
添加标题
添加标题
智能家居领域
添加标题
添加标题
医疗电子领域
嵌入式软件定义:指针对汽车电子系统进行设计、开发、测试、运行和维护的专用软件。 嵌入式软件特点:实时性、可靠性、安全性、可扩展性等。 嵌入式软件应用范围:汽车发动机控制、底盘控制、车身控制、导航系统等。 嵌入式软件开发流程:需求分析、设计、编码、测试、部署等。
嵌入式系统广泛应用于汽车电子、 智能家居、医疗设备等领域
添加标题
添加标题
添加标题
添加标题
嵌入式系统通常与实际应用紧密结 合,具有实时性、可靠性和低功耗 等特点
嵌入式软件开发是针对嵌入式系统 的软件开发,涉及到硬件和软件的 协同设计、优化和测试等方面
需求分析: 明确软件的 功能和性能 要求
架构设计: 确定软件的 整体结构和 模块划分
可靠性挑战:硬件故障、 软件崩溃等
未来发展方向:提高安全 性和可靠性的技术手段
嵌入式软件在汽车电子系统中的重要性 嵌入式软件开发过程中的质量保证措施 软件测试的目的、方法及流程 未来发展趋势:自动化测试和持续集成
汽车嵌入式系统的开发流程(汽车电子技术)
输入信号由原有ECU通过旁路接口进行传递,并由ECU通过一个控制 流接口触发旁路函数的计算。当原有的ECU接收到旁路输出信号和检测其 拟真性后决定是否采用新输出值或转接到内部替代值。
常用的两种旁路技术工具:
ETAS公司的INTECRIO(如图6-12所示)和dSpace公司的MicroAutoBox (如图6-13所示)。
系统设计的错误不易发现; 软件与硬件协同调试困难; 排除错误花费时间较长; 模型实时性差; C程序移植性差。
7.1.2 V模式开发流程
可视化的V模式中,过程步骤和产品如图5-30所示,该过程覆盖了从设 计阶段的需求分析、功能设计与实现到组件、集成的测试再到最后的所有 工作。
V模式开发过程是如图5-31所示。开发过程为硬件和软件同时进行, 最后联合调试,如图5-32所示。
对于ECU能够处理的数据格式,Targetlink软件都能够提供相应的定标:2 底数幂定标;非2底数幂定标;含有0偏移限制或不含0偏移限制。如图6-15所 示。
Targetlink的主要特性和优点如表6-2、表6-3所示。
2019/6/29
现代汽车电子技术
45
7.4 硬件在环测试
硬件在环测试是指采用真实的控制器,被控对象或者系统运行环境部 分采用实际的物体,部分采用实时数字模型来模拟,进行整个系统的仿真测 试。
基于模型化的功能设计有助于了解系统的功能,从而尽可能完整且无 矛盾地描述系统功能,并且在仿真模拟测试、功能校正和优化中体现更大 的灵活性和便利性。
技术系统结构必须考虑各种制约因素,如技术的和经济的制约,组织 结构和制造技术的约束。通过对逻辑系统结构分析和技术系统结构描述确 定技术系统结构,如图6-7所示。
efem结构介绍

efem结构介绍(原创实用版)目录1.EFEM 结构的定义和背景2.EFEM 结构的组成部分3.EFEM 结构的优点和应用4.EFEM 结构的发展前景正文一、EFEM 结构的定义和背景EFEM(Electronics, Firmware, Embedded Software, Mechanical)结构,即电子、固件、嵌入式软件、机械结构,是一种针对现代产品研发和制造的模块化设计理念。
随着科技的发展,电子产品的复杂性日益增加,为了提高研发效率和降低生产成本,EFEM 结构应运而生,将电子产品的各个部分模块化,便于分工合作和协同开发。
二、EFEM 结构的组成部分EFEM 结构主要包括以下几个部分:1.电子部分(Electronics):主要负责产品的信号处理、电源管理等功能,包括集成电路、传感器、执行器等电子元器件。
2.固件部分(Firmware):主要负责产品的底层控制和数据处理功能,包括 bootloader、BSP(Board Support Package)等底层软件。
3.嵌入式软件部分(Embedded Software):主要负责产品的应用层控制和数据处理功能,包括操作系统、中间件和应用程序等。
4.机械部分(Mechanical):主要负责产品的结构、散热、防护等功能,包括机壳、散热器、防护罩等机械组件。
三、EFEM 结构的优点和应用EFEM 结构具有以下优点:1.模块化设计:将电子产品的各个部分模块化,便于分工合作和协同开发,提高研发效率。
2.易于维护:模块化设计使得产品的各个部分可以独立更换和维修,降低了维护成本。
3.通用性强:采用标准化的接口和协议,可以实现不同产品之间的通用和互换。
4.可扩展性:通过扩展模块,可以方便地实现产品的功能升级和扩展。
EFEM 结构广泛应用于消费电子、工业控制、医疗设备等领域,如智能手机、电视、汽车电子、机器人等产品。
四、EFEM 结构的发展前景随着物联网、工业 4.0 等技术的发展,未来电子产品的研发和生产将更加依赖于 EFEM 结构。
嵌入式系统中的软件设计架构与规范选择
嵌入式系统中的软件设计架构与规范选择在嵌入式系统中,软件设计架构与规范选择起着至关重要的作用。
正确选择适合的设计架构和规范可以提高软件的可靠性、可维护性和可扩展性。
本文将讨论嵌入式系统中常用的软件设计架构和规范,并分析它们的特点和适用场景。
一、软件设计架构1. 单体架构单体架构是最简单的嵌入式软件设计架构,所有的功能模块都集中在一个应用程序中。
这种架构适用于小型嵌入式系统,因为它可以减少资源消耗和编程复杂性。
然而,随着系统功能的增加,单体架构变得越来越复杂,并且不适用于大型或复杂的嵌入式系统。
2. 分层架构分层架构将软件划分为不同的层次,每个层次负责不同的功能。
这种架构使得系统更容易理解和维护,同时也提供了更好的模块化和可扩展性。
分层架构有三层:底层驱动和硬件访问层、中间业务逻辑层和顶层用户界面层。
通过将不同的功能分配给不同的层次,分层架构提供了清晰的代码组织和功能划分。
3. 客户端-服务器架构客户端-服务器架构将软件分成两个独立部分:客户端和服务器。
客户端负责用户界面,而服务器处理数据存储和业务逻辑。
这种架构适用于需要处理大量数据或需要与其他系统进行通信的嵌入式系统。
客户端-服务器架构提供了更好的可扩展性和可重用性,同时也使得系统更易于维护和测试。
4. 事件驱动架构事件驱动架构是基于事件和消息的通信模式,系统中的组件通过事件进行交互。
当事件发生时,系统会触发相应的动作。
事件驱动架构适用于需要实时响应事件或需要异步处理的系统。
这种架构提供了更好的实时性和并发性,并且灵活性高,能够应对不同的事件交互场景。
二、规范选择1. MISRA-CMISRA-C是一种针对嵌入式C语言编程的规范,旨在提高软件可靠性和可维护性。
MISRA-C主要强调代码的一致性、可读性和安全性。
它定义了一系列规则,涵盖了代码风格、类型转换和错误处理等方面。
采用MISRA-C规范可以减少潜在的错误和漏洞,提高代码质量和稳定性。
2. AUTOSARAUTOSAR是一种用于汽车嵌入式系统开发的标准化软件架构。
基于AutoSAR的汽车电子控制系统嵌入式软件开发

2 0 1 3 年0 g 月2 O 日O 1 时4 4 分左右,5 0 0 k V 江
门站报送2 2 0 k V 江桥线 、江新 甲线 、母联等共 通过对现 场记录 的有关 数据 、设备情 况 l 0 个 间 隔 开 关 、 刀 闸从 闭 合 到 断开 , 及 几 秒 和程序源代 码进行分 析,初步确 定,误报 系 钟 后 从 断开 到 闭合 的 信 息 ,而仅 有 2 2 0 k V 江 鹤 信 号 所接 的2 4 V 直流 电源抖 动 所致 ,原因 如 乙 线 、 江 群 甲线 、 江 礼 甲线 三 个 间 隔 没 有 误 下 : 报 信号 。在 获悉相关情 况后 ,变 电管理一所 ( 1 ) 遥 信 信 号采 集 装 置 I P Cl 、I P C 2 、 继 保 自动 化 人 员 立 即 到 现 场 查 看 相 关 信 息 , I P C 6 、I P C 8 、I P C I l 和I P c 1 2 的消 抖 时 间 均 设 置 发现在 误报 的这 些信 号中 ,调度 ( 总 调 、 中 为 2 0 0 m s 。发 生 误 报 的 信 号均 由 I P C I 采集 。 调和 地 调新 江 门 站 ) 、南瑞继保后台 ( 新 后 台) ( 2 ) 遥信 信号采集装置每 隔1 秒采集一 次 和西川 I 公 司后台 ( 旧后台) 历 史 检 索 栏 均 有 记 遥 信 信 号 状 态 值 , 并 与 前 1 秒 的 状 态 值 进 行 录,但西川公司后台 ( 旧后 台 )) 的S O E 栏 没 有 比较 , 如 发 生 变 位 , 则 将 当 前状 态 值 上 送 各 记 录 ,地 调 旧江 门 站 没 有 相 关 记 录 。现 场 信 工 作 站 各 遥 信 信 号 采 集 装 置 的 采 集 时 间 不 号从 动 作 到 复 归 的 时 间大 概 为 1 秒左右。 定 同 步 , 这 由 各遥 信 信 号 采 集 装 置 的开 机 2 . 江 门 站 自动 化 系 统 结 构 介 绍 时间决定 。 伴 随 着 设 备 的 改 造 , 江 门 站 现 有 新 旧 ( 3 ) 当2 4 V 直 流 信 号 电 源 发 生 瞬 间 波 动 两 套 监 控 系 统 并 列 运 行 ,所 有 5 0 0 k V  ̄ 0 的 设 ( 2 0 0 m s 之 内 电平 为 0 ) ,而 在 此 期 间 , I P C I 采 备、# l 主 变及# 2 主 变 三 侧 都 接 入 新 的监 控 系 集 了 遥 信 信 号 状 态 值 ,它 们 将 是 0 态 ; 再 与 秒 状 态 比较 时 , 则 产 生 了 如 所 记 录 下 的 统 运 行 ,2 2 0 k V  ̄ 0 设 备和3 5 k V  ̄0 设 备 仍 由 旧 前 i 的 监 控 系 统 运 行 。 误 报 信 号 间 隔 的 一 二 次 遥 信 信 号 复 归 。 设 备 在 正 常 运 行 状 态 , 变 电站 新 旧 监 控 系 统 ( 4 ) 再 隔1 秒之 后 ,2 4 V 直 流 信 号 电源 已 正 常 运 行 , 旧监 控 系 统 的 监 控 主 机 2 作 为 主 经恢 复正 常到 的2 4 V 电平 ,I P C 1 采集 到 的遥 态 , 故 产 生 了 如 所 记 录 机与 新监控 系统 的规 约转换 器R C S - 9 7 9 4 A 通 信 信 号 状 态 值 将 是 1 信 , 旧监 控 系 统 的监 控 主 机 1 、 操 作 员 工 作 下 的遥 信 信 号 动 作 。 站 一 、操 作 员工 作 站 二 为 备机 。 ( 5 ) 由于2 4 V 直 流 信 号 电源 的波 动 时 间 在 其 通 信 结构 拓 扑 图 如 图 1 所 示 2 0 0 m s 之 内 , 在 各 遥 信 信 号 采 集 装 置 的 消 抖 范 围 内 ,故 未 产 生S O E 信号 。 ( 6 ) 由 于 地 调 旧江 门站 的 数 据 由西 川 公 j l = l l l l l l j l =I 司的I H R T U 转 发 ,而 转 发 数 据 仅 限 于 遥 信 全 数 据 、遥测全数据  ̄ n S O E 信 息,故 I P C 1 采集装置 短 时间遥信 电源抖动产生 的变位信 息不能及 时 发送 给 地 调 旧 江 门站 。 而 与 旧监 控 系 统 通 信 的南 瑞 继保 规 约转 换 装置 R C S 一 9 7 9 4 A 在 收 到 1 1 l 1 l 1 1 I 以 上误 报 变 位 信 息后 , 自动 生 成S O E 数据后发 = I I l l I l l l! 送 给 新 监 控 系 统 , 因此 新 监 控 后 台 和 调 度 能 收到 以上 误 报 信 息 的变 位 和 S O E 数据 。 此外 ,根据D C 2 4 V 在 各 机 柜 接 线 示 意 图
汽车BCM的软件分析与设计

汽车BCM的软件分析与设计
引言
随着汽车电子的发展,集车身网络网关、灯光/雨刷/车窗控制、RKE及
门锁控制等于一体的BCM(车身控制模块)正在成为一种主流,由于不同车型的BCM在原理和系统结构上基本是一致的,只是在模块组合或具体模块的实现
上存在一定差异,所以有必要针对某款特定的BCM分析其系统结构,设计通用、共性的车身控制嵌入式软件结构及可配置可组装的基础模块,基于该软件结构及基础模块库,可以针对不同车型的BCM研发相应的车身控制器软件,提高BCM的软件可靠性,降低开发复杂度。
该软件需要具备以下特性:
1、软件结构具有可扩展性,添加新功能不会破坏原有的软件结构和影响原有系统的行为;
2、建立一种有效的复用和组装关系,这样在开发新车型的BCM时,可以避免基础软件模块的重复开发,避免成本的增加以及开发周期的延长;
3、软件模块之间形成统一约定的软件接口标准,保证模块的独立性和可重装性;
笔者结合为某车型开发的一款BCM,从BCM的系统结构、软件结构的
设计和部分模块的实现上分析车身控制模块的设计原理及具体实现。
系统结构
BCM是个典型的控制系统,其输入接口包括一系列开关信号和行车相
关脉冲信号,输出接口为包括门锁、灯光、雨刷、车窗、报警器在内的一系列控制对象,同时通过RF信号和遥控车钥匙通信,通过LIN总线和传感器节点及车窗节点进行控制命令和状态信息的交互,其外部接口如图1所示:。
AUTOSAR

29
29 北京科银京成技术有限公司
OS
一些扩展的API
GetApplicationID GetISRID CallTrustedFunction NextScheduleTable IncrementCounter SyncScheduleTable
CheckISRMemoryAccess
CheckTaskMemoryAccess CheckObjectAccess
通信模型(二)
ECU ECU
SWC
SWC
发送-接收端口
客户-服务端口 客户-服务通信
发送-接收通信 ECU间软件组件间通信
21
21 北京科银京成技术有限公司
通信模式
针对接收-发送通信提供两种通信模式
显式的-使用显式的RTE API调用来发送或接 收数据元素 隐式的-在可运行实体被调用前RTE自动的读 一个特定中的数据元素集合,在可运行实体终 止以后RTE自动的往另外的数据元素集合中写
12
12 北京科银京成技术有限公司
例子——层的交互
服务层
Application
Rte_Write(...)
RTE
Nvm_Write(...)
存储服务 NVRAM管 理器
MemIf_Write(...)
存储硬件抽象 存储抽象接口
ECU抽象层
EEPROM抽象
FeeWrite(...)
Flash EEPROM抽象
SetScheduleTableAsync
GetScheduleTableStatus TerminateApplication
CheckObjectOwnership
StartScheduleTableRel StartScheduleTableAbs StopScheduleTable
汽车EE架构不断升级,华为CCA架构指引未来演变趋势

汽车EE架构不断升级,华为CCA架构指引未来演变趋势⼀、ADAS 功能升级导致算⼒需求提升驾驶辅助功能快速提升,分布式架构向“功能域”集中式架构演进成为趋势。
传统分布式 ECU 在汽车电⽓化、智能化时代因为驾驶辅助功能快速的提升,⾯临着巨⼤的挑战。
1)各个 ECU 之间算⼒⽆法协同,相互冗余,产⽣极⼤浪费;2)⼤量的嵌⼊式OS 及应⽤代码由不同的 Tier 1 提供,语⾔和编程风格迥异,导致难以统⼀维护和 OTA升级;3)分布式架构需要⼤量内部通信,导致线束成本增加并加⼤装配难度。
因此,分布式架构向“功能域”集中式架构演进成为趋势。
汽车&不同⾏业软件代码量/⾏未来汽车软件代码量变化趋势/⾏⼆、 “软件定义汽车”背景下,整车 OTA 需要 SOA 架构升级相较于传统汽车,整车 OTA 为汽车注⼊新的活⼒。
在“软件定义汽车”时代,OTA(Over The Air)空中下载能够满⾜智能汽车软件快速迭代的需求,避免传统汽车每次更新都需要去 4S 店,从⽽导致效率低下的问题。
通过它可以不断给客户开启新的功能,不断优化产品体验,吸引客户。
传统分布式 ECU 软硬件架构,整车 OTA 效率低下。
在传统的分布式 ECU 架构下,有以下⼏个问题:1)ECU 众多,且由不同的供应商进⾏开发,软件框架不同,外部开发者难以对 ECU 进⾏编程更新。
2)通过 CAN/LIN 总线进⾏通信,信号收发关系和路由信息静态固定,各 ECU 周期性发出各种信号,通过⽹关进⾏转发,若更新信号配置,需要同步修改⽹关配置。
3)控制器之间信号嵌套,单个控制器升级需要将所有信号相关控制器全部升级,⼯作量指数上升。
分布式 E/E 架构⾯临 OTA 困难为实现“软件定义汽车”,SOA 架构成为新的趋势。
SOA(Service-Oriented Architecture)⾯向服务架构,是⼀种架构设计思想,将应⽤程序的不同功能单元(称为服务)通过这些服务之间定义良好的接⼝和契约联系起来。
汽车软件研发体系

汽车软件研发体系汽车软件研发体系是现代汽车行业中不可或缺的一部分,它扮演着汽车科技创新的重要角色。
在这篇文章中,我们将一步一步回答有关汽车软件研发体系的问题,并探讨其在现代汽车行业中的重要性。
第一步:什么是汽车软件研发体系?汽车软件研发体系是指在汽车生产和制造过程中,为了满足汽车的增强功能和智能化需求,而开发和部署的一系列软件工具和技术。
它涵盖了车载软件、车联网软件、自动驾驶软件等多个方面。
第二步:汽车软件研发体系的组成部分有哪些?汽车软件研发体系可以分为以下几个组成部分:1. 嵌入式软件:嵌入式软件是指安装在车辆电子控制单元(ECU)上的软件。
它控制着车辆各种系统的运行,如发动机控制系统、刹车系统、空调系统等。
嵌入式软件需要具备高可靠性和实时性。
2. 人机交互软件:人机交互软件是指车辆内部的显示屏、操控按钮等与驾驶员和乘客进行信息交互的软件。
它包括车载娱乐系统、导航系统、蓝牙连接等功能。
3. 车辆互联软件:车辆互联软件是指通过车联网技术将车辆与外部世界连接起来的软件。
它实现了车辆之间的通信、与智能交通系统的互动以及与云平台的数据交换。
4. 自动驾驶软件:自动驾驶软件是指实现车辆自动驾驶功能的软件。
它包括环境感知、路径规划、车辆控制等模块,能够使车辆在不需要人类干预的情况下完成驾驶任务。
第三步:为什么汽车软件研发体系如此重要?汽车软件研发体系在现代汽车行业中扮演着重要的角色,其重要性体现在以下几个方面:1. 增强产品竞争力:汽车软件研发能够为汽车提供更多的增强功能和智能化体验,如车载导航、语音助手、自动泊车等。
这样的增强功能能够提升产品的竞争力,吸引更多消费者选择汽车品牌。
2. 提高安全性和可靠性:嵌入式软件在汽车中起到了关键作用,它控制着车辆的各种系统,如发动机、刹车等。
良好的软件设计和开发能够确保车辆在各种情况下的运行安全,并提高车辆的可靠性。
3. 实现智能驾驶目标:自动驾驶技术是当前汽车行业的热门话题,而自动驾驶软件是实现智能驾驶的核心。
汽车电子行业嵌入式

入式 来 说 .汽 车 电子 绝不 是 一 电 子 中 应 用 软 件 的 模 块 性 、 可 读 性 、可 维 护 等。浙江 大学嵌入式系统工程实 个 新 兴 的行 业 ,但 是 对于 中国 性、可移植 性及可扩充性 .缩短 了系统开发 验 室 开发 的 S at S K操 作 系 统 mr E O
术发展 的新热点 。据麦肯锡报告 层网络协议包括 C N pn A 13 等。 A oe 、S E J9 9 中 ,20 年 ,微型轿车控制单元 03
求。 一些 主 流 的汽 车 制造 商 、 件 配
为了满足 日益 庞大复 杂的汽车 电子控 制 供应商、半导体 生产商 以及软件
运 行 的 软 件 已 占整 车 制造 成 本 的 软 件 的 开 发 需要 ,实现 应 用 软件 的可 移 植 性 工 具开 发 商于 20 年 联 合成 立 了 03
维普资讯
汽车 电子行业嵌入式
口 文 /浙江大学嵌入式系统工程 实验室 杨国青
现 代 汽 车 大 量 应
汽车电子中的嵌入式软件按照层次划分 , 软件开发的发展方向。很多公司
用 了 电子 技术 ,使 汽车 的 性能 包括嵌入式 实时操作 系统 (T S) R O 、通信软 推 出 了符 合 O E / D S K V X规 范 的操
产 量 达 到 5 0余 万辆 ,已成 为世 通信和 网络管理等方面对汽车电子的嵌入式 义 了一套支持分布式的、功能驱 0 界 第 四 大汽 车 生 产 国 ,是 一 个 巨 软 件 开 发 平 台 作 了 较 为 全 面 的 定 义 与 规 定 。 动 的汽车 电子软件开发方法 和电 大的汽车电子嵌入式软件市场 。 它 所 提 出 的 一 整 套 解 决 方 案 是 未 来 汽 车 电 子 子控制单元上的软件架构标准。
汽车嵌入式系统

三个发展阶段
第一阶段:SCM系 统 以4位和低档8位微 处理器为核心,将 CPU和外围电路集 成到一个芯片上, 配置了外部并行总 线、串行通讯接口、 SFR模块和布尔指 令系统。硬件结构 和功能相对单一、 处理效率低、存储 容量小、软件结构 也比较简单,不需 要嵌入操作系统。 第二阶段:MCU系统 以高档的8位和16位处理 器为核心,集成了较多外 部接口功能单元,如A/D转 换、PWM、PCA、 Watchdog、高速I/O口等, 配置了芯片间的串行总线; 软件结构比较复杂,程序 数据量有明显增加。 第二代汽车嵌入式系统能 够完成简单的实时任务, 目前在汽车电控系统中得 到了最广泛的应用,如 ABS系统、智能安全气囊、 主动悬架以及发动机管理 系统等。 第三阶段:SoC系统 以性能极高的32位甚 至64位嵌入式处理器 为核心,在对海量离 散时间信号要求快速 处理的场合使用DSP 作为协处理器。为满 足汽车系统不断扩展 的嵌入式应用需求, 不断提高处理速度, 增加存储容量与集成 度。在嵌入式操作系 统的支持下具有实时 多任务处理能力,同 时与网络的耦合更为 紧密。
汽车嵌入式系统
1
汽车嵌入式系统基础
C
ONTENTS
2
汽车嵌入式系统发展历程
目 录
3
SoC系统的典型应用
一、汽车嵌入式系统基础
二、汽车嵌入式系统发展历程
众所周知嵌入式系统有体积小、低功耗、集成度高、子系统 间能通信融合的优点,这就决定了它非常适合应用于汽车工 就使得嵌入式系统在汽车电子技术中得到了广泛应用。 目前,从车身控制、底盘控制、发动机管理、主被动安全系统 到车载娱乐、信息系统都离不开嵌入式技术的支持。 嵌入式系统诞生于微型机时代,经历了漫长的独立发展的单 片机道路。嵌入式系统的核心是嵌入式微处理器。与嵌入式 微处理器的发展类似,汽车嵌入式系统也可以分为三个发展阶 段。
汽车嵌入式系统的开发流程(汽车电子技术)
步骤8:返回步骤1.通过实时测试,获得反馈信息。 以上Matlab结合dSpace Targetlink展示典型汽车ECU开发流程。
7.2 模型搭建与算法仿真
7.2.1 功能设计(建模)
功能设计,即系统逻辑结构和技术结构的确定。用户需求分析是指 在系统开发的早期阶段,对于需求和限制条件的一种结构化的处理方法。 目的是从系统用户的角度准确地描述系统的逻辑系统结构。
(3)自动代码生成(Automatic Production Code Generation) 减少编程时间和手写代码错误; 模型与C代码相互协调; 统一的编码格式; 极少的错误率。
(4)ECU仿真测试(ECU Testing with Simulator) 硬件循环仿真测试; 更少的原型和测试装置、更低的测试成本; 系统全面快速的测试; 可靠性高、风险低。
现代汽车电子技术
2019/6/29
信号与信息处理研究所 丁山
1
第7章 汽车嵌入式系统的开发流程 7.1 汽车嵌入式系统的开发流程
车载嵌入式系统的开发总是把汽车嵌入式系统划分为子系统,如 ECU(硬件和软件)、传感器和执行器(硬件),然后对各子系统进行测试和确 认,进而集成一个完整的电子系统。
7.1.1 传统的开发流程
(3)生产产品代码。将模型转换为产品代码是开发过程中最关键的一 步。
(4)第四阶段:硬件在环仿真(Hardware-in-the-Loop, HIL)
(5)第五阶段:系统集成测试/标定
以Matlab结合dSpace Targetlink工具箱为例来说明上述的具体开 发步骤:
步骤1:用线性或非线性方程建立控制对象的理论模型;
基于团队协作开发带来的技术实现方法有: 基于模型的系统开发; 代码自动生成; 在线标定; 在线和离线诊断。个方面: ①技术规范体系和标准的逐步确定。 ②开发流程的逐步统一。 ③开发理念工具化。
Rhapsody 基本介绍+模块介绍
IBM Rational Rhapsody——一流的MDD解决方案IBM Rational Rhapsody是一流的为嵌入式软件、系统和测试环节提供的MDD 解决方案,广泛应用于航空航天、国防、汽车、医药、工业自动化、电信/数据通信或消费电子等行业。
1.嵌入式开发介绍随着嵌入式系统的应用越来越广泛,软件规模越来越大,出现了一系列的问题,开发周期长、开发费用昂贵、开发出来的软件质量难以保证、开发生产率低、软件的复杂程度也愈加复杂。
大型嵌入式应用系统的设计和开发利用早期的手工作坊式的开发方式已经不能完成任务,必须使用工程化的开发方式。
嵌入式应用系统的发展经过了下面几个阶段:1、80年代前,无实时操作系统时代这一阶段一般应用开发人员需要结合硬件系统,做很多硬件底层开发任务,软件应用开发效率比较低。
2、80年代后~90年代末,实时操作系统时代80年代欧美一批公司,开发了很多底层平台技术,包括实时操作系统,如VxWorks等。
这些实时操作系统把底层一些通用的机制打包给开发人员,使得开发人员无需自己去手写底层的调度、驱动;而是通过选择架构组件的方式去重用这些底层的机制,比如BSP、通信协议等。
开发人员从繁杂的底层操作中解放出来,去专心写上层的应用和文档。
从而软件的质量和效率得到大幅提高。
3、00年代,UML1.x建模时代90年代后期,UML技术出现了,各大技术厂商纷纷加入UML的阵营。
由于UML 当时还处于1.x阶段,具有一定的局限性,绝大部分公司只将UML用在的系统分析和设计这一“高层”领域。
4、当今,UML2.x时代最近5年以来,在IBM/Telelogic的共同努力下,模型驱动的嵌入式开发以及成为业界的主流趋势。
其主要特点和方向是:1.UML2.x的出现极大丰富了UML,从通信界代码生成技术最成功的SDL语言汲取了大量语法语义。
使得代码完全自动生成成为可能。
2.底层操作系统逐渐向Eclipse IDE融合,使得UML模型可直接结合到IDE上生成代码的工程,即方便调试也保证了模型代码的高度一致性。
基于AUTOSAR的汽车电子控制系统嵌入式软件开发

应 商 就 可 以 节 省 软 件 开 发 费 用 或 者 向 我 们 支 付 软 件
使用费用
一
( 用 一 般 在 2 万 元 人 民 币 左 右 ), 那 么 费 0
个 车 型 仅 在 E CU开 发 中 就 会 减 少 4 o 元 左 右 人 0 万
民 币 的成 本 。 1 AUToSAR简 介
c d s; a s i r d e t a a t g s o de e o ng v hi l ECU s fwa e wih AUTOSAR s a da d a d m a e oe lo nto uc s he dv n a e f v l pi e c e o t r t tn r n ks s g si n f r t e ug e to s o h de e o v l pme o h s e hn q i ur na i n l ut mo i e nd t y nt f t i t c i ue n o to a a o tv i usr .
响 。 针 对 EC U内 部 软 件 的 开 发 , 目 前 有 一 种 较 受 推
崇 的 方 式 。 就 是 采 用 统 一 的 开 放 式 嵌 入 式 软 件 架 构 .并 为 软 件 架 构 中 的 软 件 模 块 定 义 统 一 的 标 准 。
AUT AR是 目 前 国 际 流 行 的 标 准 软 件 架 构 . 独 立 OS
1 1 什 么 是 AUT AR . oS
A UT0SAR f AUTo o i e m tv Op n y t m A Rc i e S s e h~
将 导 致 重 新 编 写 软 件 或 对 软 件 进 行 大 量 修 改 。 如 果
自主汽车电子软件架构技术战略解析与规划
硬 件 实现方 式 : c 总线 数 据解 析 .协 议 数据 与 应用 数 据之 间 . 的特性 不一 致 . 应保 证 两者之 间 的有效 衔接 和 匹配 :
d 各 总 线 节 点 的 电源 模 式 不 一 样 .基 于 不 同 . 的 电 源 供 电 方 式 ( L 0 K R、 L 5供 电 ) 各 总 线 K 3 、L K 1 ,
Ke y wor :Aut m o i l c r ni s ds o tve e e t o c ,So t a e a c t c ur 。I de e fw r r hie t e n p nde tbr nd n a
1 前 言
目前 . 随着对 汽 车动力 性 、 安全 性和 舒适 性要 求 的不断上 升 .各控 制 系统 之 间的信 息交 互也 越来 越 丰 富 如 .典 型 的 中级车 系统 涵盖 多个 功 能区域 及 数 百个功 能 .由全 球 化供应 商 提供 的数 十个 网络 化
o h ss f r r hie t e i v lpe n a le o t e ee toncs & e e t c s tm fi de e e tv il a d. n t i ot e a c t cur sde eo d a d pp id t h lc r i wa l cr yse o n p nd n ehc e br n i e a i h fe e ta e o p tto dg fi e n n e i l a nh ncngt e di r n it d c m e i n e e o nd pe de tv h ce brnd. f i
fr i n s fwae a c ie t e tnd r rt ra a l a o me ca out n,as o o eg o t r r ht cur sa a d c e swel s c m i i r ils l i o lo c mbi d wih t pp iai n p a tc ne t he a lc to r c ie o lcr is s se o n p nd n e ce b a d,a s fwa e a c t cu e whih i e r t ee a n e n to a t n a d fee tonc y tm fi de e e tv hil r n ot r r hie tr c ntg aesr lv nti tr a in lsa d r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电子科技大学嵌入式软件工程中心
微控制器抽象层
微控制器抽象层的驱动 –基础软件中最底层的位置,向上层软件屏蔽微控制 器和ECU硬件设备驱动的细节和差异,是降低汽车 电子应用软件与硬件的相关性,提高汽车电子应用 软件和功能组件可重用性和可移植性的重要技术手 段 –直接访问uC内部外设和内存映射uC外部设备
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 微控制器驱动-微控制器单元驱动MCU
– 负责微处理器的各项设定,包括复位,初始化,电源 管理,唤醒,时钟设定等。 – MCU驱动提供用于基本微控制器的初始化,下电,复 位和其它MCAL软件模块需要的微控制器特定功能的服 务。初始化服务提供了灵活性,同时,除了启动代码 之外,还提供了应用程序相关的MCU初始化。启动代 码是完全特定于MCU的。MCU驱动直接访问微控制器 硬件,它位于微控制器抽象层(MCAL)中
电子科技大学嵌入式软件工程中心
ECU 抽象层 通信硬件抽象层
–对于内部和ECU硬件架构上外部通信控制器的抽象 –对于所有的通信系统(LIN,CAN,FlexRay),都需 要特定的通信硬件抽象: • LIN接口 • CAN接口 • FlexRay接口 –如果MCU没有板载通信控制器,需要外部的ASIC
电子科技大学嵌入式软件工程中心
软件模块类型介绍
接口(Interface) –接口包含的功能是为上层抽象特定设备的硬件实现 –提供通用API访问设备特定类型,不考虑这种设备 类型存在的数量和不同设备硬件实现 –接口不改变数据内容 –通常接口的位于ECU抽象层 例如:一个CAN通讯系统接口提供通用API访问CAN通 讯网络而不用管ECU上的CAN控制器的数量和硬件实 现
电子科技大学嵌入式软件工程中心
微控制器抽象层
• I/O驱动
–ICU驱动、PWM驱动、ADC驱动、DIO驱动、PORT驱动 –模拟和数字I/O驱动(e.g.,模数转换器ADC,脉宽调制 PWM,数字输入输出DIO)
电子科技大学嵌入式软件工程中心
微控制器抽象层
• I/O驱动-ICU驱动
– 对周期性输入信号进行频率检测以及占空比测量,计 算脉冲,解调脉宽调制信号,捕获非周期输入信号, 产生相应的中断或唤醒中断
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 内存驱动-FLASH驱动
–提供读、写和擦除闪存的服务,以及设置写/擦除保护 的配置接口 –提供了一个内置加载器,以加载闪存存取代码到RAM中, 并在需要的时候执行写/擦除操作
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 内存驱动-RAM测试
–负责RAM单元(包括用于寄存器的单元)的物理性诊断 (非数据检测),不同的诊断方式需要预编译然后根 据系统或用户需要实时运行
电子科技大学嵌入式软件工程中心
ECU 抽象层 通信硬件抽象层-LIN接口
–为上层LIN SM模块和PDU Router模块提供驱动抽象 接口,通过下层驱动模块对LIN硬件设备进行控制。 功能主要包括:根据上层通信模块切换调度表,执 行LIN数据帧的收发,控制设备的唤醒和睡眠,错 误处理以及诊断服务 –LIN接口被设计成硬件无关的。到上层模块(PDU路 由器)和下层模块(LIN驱动)的接口被很好地定 义。 –LIN接口可以处理一个以上的LIN驱动。一个LIN驱 动能够支持一个以上的通道。这指的是LIN驱动能 够处理一个或多个LIN通道
– 为定时服务程序提供定时中断 – GPT驱动允许产生单触发或持续的计时器通知,这个 模块使用通用计时器的硬件计时通道,因此就为操作 系统中或者其它基本软件模块(在这类模块中,OS警 告服务有过多的开销)中的使用提供了精确的、短期 的计时。 – GPT驱动提供了用于启动和停止硬件计时模块中的功 能计时实例(通道)的服务。它能够产生单个超时周 期以及重复超时周期。如果必须调用一个通知,那么 当所请求的超时周期过期时,用户就能够对它进行配 置。可以在运行时启用或禁用通知。
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 通讯驱动-CAN驱动
–为上层的CAN 接口模块提供硬件抽象接口,负责对CAN 硬件传输进行初始化,实现事件通知,控制属于相同 CAN硬件单元的CAN控制器。 –CAN驱动尽可能合理地隐藏了相关CAN控制器的硬件专 用性。 –CAN驱动是最底层的一部分,为上层执行对硬件的访问 和提供硬件无关的API。上层中唯一能够访问CAN驱动 的是CAN接口。 –如果几个CAN控制器属于相同的CAN硬件单元,那么它 们能够由CAN驱动来控制 –一个CAN控制器总是与一个物理通道相关联。它被允许 与总线上的物理通道相连接,不管CAN接口是否将相关 的CAN控制器分别对待
汽车电子嵌入式驱动软件结构
电子科技大学嵌入式软件工程中心
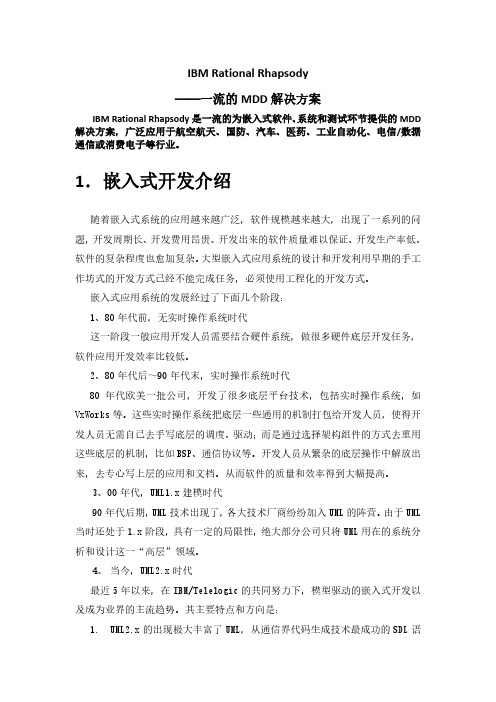
主要内容
• • • • • 汽车电子软件体系结构 软件模块类型介绍 微控制器抽象层 ECU抽象层及示例 复杂驱动
电子科技大学嵌入式软件工程中心
• 基础软件体系结构-基本层:
汽车电子软件体系结构
电子科技大学嵌入式软件工程中心
• 基础软件体系结构-细化分层:
• I/O驱动-DIO驱动
– DIO通道的管脚和组以及端口进行读写 – 提供基于端口和通道的、对内部通用I/O断点的读和写 访问。这里的读和写并不被缓冲。这个驱动的基本行 为是同步的
电子科技大学嵌入式软件工程中心
微控制器抽象层
• I/O驱动-PORT驱动
– 微控制器所有端口的初始化
电子科技大学嵌入式软件工程中心
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 微控制器驱动-通用定时器驱动GPT
– 不管是从上一个通知发生以来的相对时间消耗,还是 到下一个通知之间的剩余时间,都可以进行查询。 – 注意,GPT驱动仅产生时间基础,而不服务于时间计 数器。这个功能是由另一个模块(ICU驱动)提供的 – GPT驱动可以用来唤醒ECU,不管预定义的超时周期 是否过期。模式转换服务将GPT驱动在普通操作和睡 眠模式之间进行转换。 – 该驱动不提供超时周期,这些超时周期超过了被时钟 源、预定标器和计时寄存器所限制的最大值。用户必 须对这个进行处理。
汽车电子软件体系结构
电子科技大学嵌入式软件工程中心
软件模块类型介绍
驱动(Driver)
功能:控制和访问内部或外部设备
– 内部设备: • 设备位于微控制器内部,如:内部EEPROM、内部 CAN控制器、内部ADC • 内部设备的驱动称为内部驱动,并且驱动位于 微控制器驱动层 – 外部设备: • 设备位于在ECU硬件的微控制器外部,如:外部 EEPROM、外部Watchdog、外部Flash • 外部设备的驱动称为外部驱动,并且驱动位于 在ECU抽象层,它通过微控制器驱动层访问外部 设备,如:带SPI接口的外部EEPROM驱动通过 SPIHanderDriver驱动访问外部EEPROM
–提供外设的SPI读写通信控制驱动 –允许多个客户端对一个或多个SPI总线的并发访问。为 了抽象SPI的特征,SPIHandlerDriver要直接处理微控 制器中的片选引脚。这就意味着这些引脚对DIO驱动无 效 –SPI总线是一种主从多节点总线系统,主节点设置片选 (CS)来选择一个从节点来进行数据通信。SPI有一个 4线的同步串行接口。使用片选线来激活数据通信
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 通讯驱动
–包括:SPI驱动、LIN驱动、CAN驱动、FlexRay驱动 –ECU板级上的通信驱动(e.g.,SPI,I2C) –车载通信驱动(e.g.,LIN,CAN,FlexRay网络)
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 通讯驱动-SPI驱动
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 通讯驱动-FlexRay驱动
–为上层的FlexRay 接口模块提供硬件抽象接口,负责 对FlexRay 硬件传输进行初始化,实现事件通知,控 制属于相同FlexRay 硬件单元的FlexRay 控制器 –FlexRay驱动模块必须为FlexRay接口模块、API的使用 者提供统一接口,以访问许多FlexRay通信控制器,这 些控制器通常是相同类型的。FlexRay驱动是一个软件 层,它将抽象功能请求映射到CC专用硬件的序列上。 CC的硬件实现将从FlexRay接口隐藏
电子科技大学嵌入式软件工程中心
微控制器抽象层
• 通讯驱动-SPI驱动
– SPI模块提供基于通道的对SPI总线上的不同设备的读、 写和传输访问,SPI通道代表数据元素(8到16比特)。 这些通道可能是顺序组合的,不能够被中断。通道有 一个静态配置定义的波特率、片选等等。SPI设备通常 由所使用的SPI硬件单元和相关的片选线来标识。这个 模块能够作为SPI主节点来使用 – 这个软件模块的功能范围应该是可静态配置的,以尽 可能多的适应每个ECU的时间需要。那就是说,比如 同步的、异步的、或者两者都有的SPI访问都可以存在 于ECU。因此,两个SPI驱动可以存在,但仅有一个处 理接口。
• I/O驱动-ADC驱动
–对微控制器内部ADC端口进行初始化和控制 –ADC驱动初始化并控制微控制器内部的模数转换单元。 该驱动包含一系列的基本功能函数。为了能够在某些 特殊的应用中进行信号的频率分析(例如,快速傅立 叶变换),就需要加强流式存取的功能
电子科技大学嵌入式软件工程中心
微控制器抽象层
电子科技大学嵌入式软件工程中心
软件模块类型介绍
处理程序(Handler) –处理程序是一个特殊接口,它控制一个或多个访问 程序对一个或多种驱动程序的并发、多重和异步方 式的访问,如:执行缓冲、队列、仲裁、多路传输 –处理程序不改变数据内容 –处理程序功能是提供合并的驱动或接口(e.g., SPIHandlerDriver,ADC Driver)
电子科技大学嵌入式软件工程中心