题目:汽车主动悬架及控制方法
概述汽车主动控制悬架系统的工作原理及控制模式

高速感应控制 车速 #/"$% & ’ 车 速 *" 0/"$% & ’ , 车 高 持 续 .(,) 以 上 大幅度变化 车 速 #/"$% & ’ , 车 高 持 续 .(,) 以 上 大 幅度变化
"$" """
""" "
连续坏路 面控制
0
0 ←0
车速与路面感应控制逻辑关系
悬架的刚度与阻尼 汽车行驶工况 “ 软”模式 “ 硬”模式 低 中 高 低 中 高 0
公共汽车
《城市公共交通》 " ! !##$
概述
汽车主动控制悬架系统
的 工作原理及控制模式
太原市公共交通总公司
摘 要 :主 动 控 制 悬 架 系 统 能 使 汽 车 乘 坐 舒 适 性 和 操 作 安 全 性
郭丽萍
( <)传感器。电子控制悬架系统传感器将汽车行驶的 路面状况和车速, 以 及起动、加速、转向、制动等工况转 变为电信号,输送给电子控制器。该系统所使用的传感器 见表 <。 表<
中图分类号: ’($)$$
文 章 编 号: "##*+"’(, ( !##$ ) #"+##",+#! 收 稿 日 期: !##!+#*+"#
C <B C
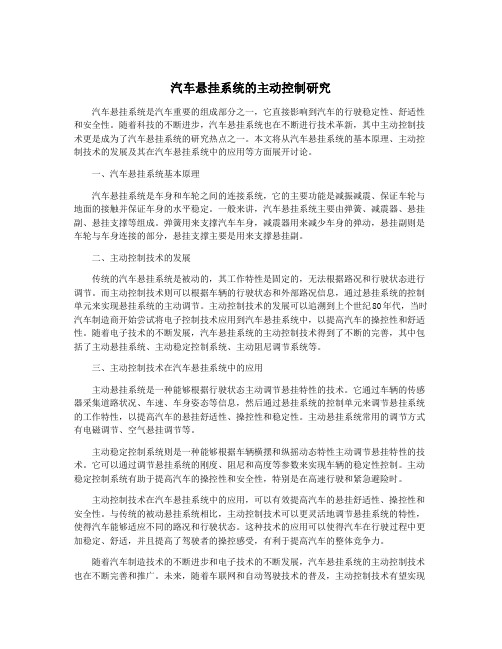
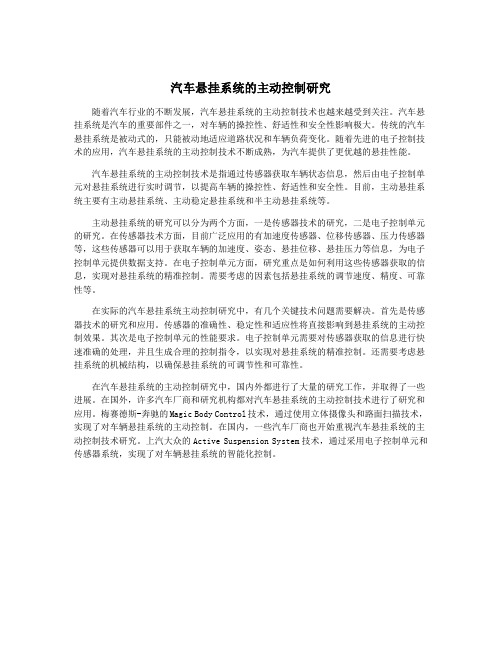
状态,在这两种不同的模式下,悬架由控制器控制在 三种状态,根据车速和路面的变化自动地调节刚度和 阻尼系数,使车身的振动达到最佳的控制。其逻辑关 系 见 表 .。 ( .) 车 身 姿 态 控 制 。 是 指 在 汽 车 车 速 突 然 改 变 及 转向等情况下,控制器对悬架的刚 度 和 阻 尼 实 施 控 制 , 以抑制车身的过度摆动,从而确保车辆乘坐舒适性和 操纵稳定性。其逻辑关系见表 ! 。 表!
汽车悬挂系统的主动控制研究
汽车悬挂系统的主动控制研究汽车悬挂系统是汽车重要的组成部分之一,它直接影响到汽车的行驶稳定性、舒适性和安全性。
随着科技的不断进步,汽车悬挂系统也在不断进行技术革新,其中主动控制技术更是成为了汽车悬挂系统的研究热点之一。
本文将从汽车悬挂系统的基本原理、主动控制技术的发展及其在汽车悬挂系统中的应用等方面展开讨论。
一、汽车悬挂系统基本原理汽车悬挂系统是车身和车轮之间的连接系统,它的主要功能是减振减震、保证车轮与地面的接触并保证车身的水平稳定。
一般来讲,汽车悬挂系统主要由弹簧、减震器、悬挂副、悬挂支撑等组成。
弹簧用来支撑汽车车身,减震器用来减少车身的弹动,悬挂副则是车轮与车身连接的部分,悬挂支撑主要是用来支撑悬挂副。
二、主动控制技术的发展传统的汽车悬挂系统是被动的,其工作特性是固定的,无法根据路况和行驶状态进行调节。
而主动控制技术则可以根据车辆的行驶状态和外部路况信息,通过悬挂系统的控制单元来实现悬挂系统的主动调节。
主动控制技术的发展可以追溯到上个世纪80年代,当时汽车制造商开始尝试将电子控制技术应用到汽车悬挂系统中,以提高汽车的操控性和舒适性。
随着电子技术的不断发展,汽车悬挂系统的主动控制技术得到了不断的完善,其中包括了主动悬挂系统、主动稳定控制系统、主动阻尼调节系统等。
三、主动控制技术在汽车悬挂系统中的应用主动悬挂系统是一种能够根据行驶状态主动调节悬挂特性的技术。
它通过车辆的传感器采集道路状况、车速、车身姿态等信息,然后通过悬挂系统的控制单元来调节悬挂系统的工作特性,以提高汽车的悬挂舒适性、操控性和稳定性。
主动悬挂系统常用的调节方式有电磁调节、空气悬挂调节等。
主动稳定控制系统则是一种能够根据车辆横摆和纵摇动态特性主动调节悬挂特性的技术。
它可以通过调节悬挂系统的刚度、阻尼和高度等参数来实现车辆的稳定性控制。
主动稳定控制系统有助于提高汽车的操控性和安全性,特别是在高速行驶和紧急避险时。
主动控制技术在汽车悬挂系统中的应用,可以有效提高汽车的悬挂舒适性、操控性和安全性。
车辆主动悬架最优控制

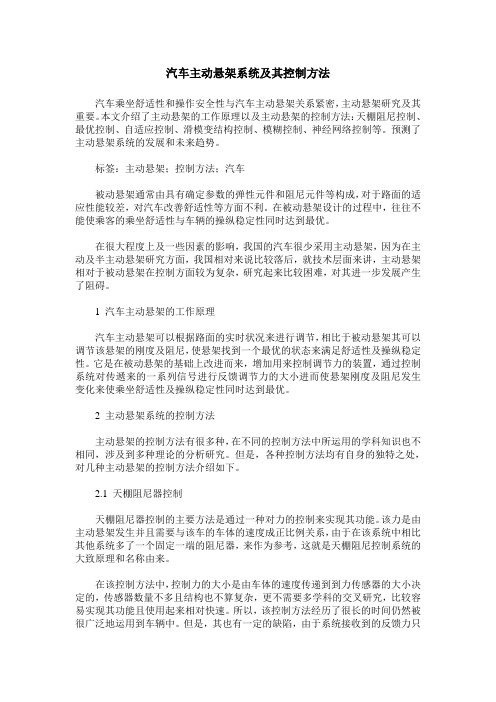
图 1. q1=3.35E5 ,q2 =40.5E5 的幅频特性图 由图 1 可以看出主动悬架的车身加速度、悬架动扰度、轮胎动载荷幅频特性图同被动悬架相 似,同样具有双峰,不同的是在低频固有频率附近,主动悬架的响应幅值明显减小,且变化 平缓, 主动悬架的减振性能较为突出; 在高频固有频率附近, 主动悬架的响应幅值变化较大 。 可知取该组权系数时,主动悬架的减振性能的改善程度不够理想; 2) 取 q1=3.35E8,q2 =40.5E8 时,由程序得 k1 =63640;k2=4863;k3 =-36146;k4 =-904;及 系统的传递函数和幅频特性,绘制幅频特性图 %主动悬架 q1=3.35e8;q2=40.5e8 时的仿真程序: m1=36;m2=240;kt=160000;q1=3.35e8;q2=40.5e8; A=[0 1 0 -1;0 0 0 0;0 0 0 -1;0 0 kt/m1 0]; B=[0;1/m2;0;-1/m1];D=[0;0;1;0]; C=[0 0 0 0;1 0 0 0;0 0 1 0]; E=[1/m2;0;0];H=[0;0;0]; Q=[q2 0 0 0;0 0 0 0;0 0 q1 0;0 0 0 0];R=[1]; [K,P,F]=lqr(A,B,Q,R) M=A-B*K; N=C-E*K; G=ss(M,D,N,H); G1=tf(G) i=1; for s=0:0.1:80 s=s*2*pi*j; G11=(150.6*s^3 + 1.673e004*s^2 + 1.179e006*s + 1.653e-008)/(s^4 + 45.36*s^3 + 5473*s^2 + 9.005e004*s + 1.179e006);
汽车主动悬架及控制方法的研究
摘要作为整体车辆的重要组成部分,。
车辆悬架对汽车的各项性能(包括汽车操纵稳定性、行驶平顺性和行驶速度等)产生重大影响。
传统的被动悬架一般由具有阻尼元件和固定参数的弹性元件组成,被设计为适应某一种路面,不利于进一步提高车辆性能。
20世纪70年代工业发达国家已经开始研究基于振动主动控制的主动、半主动悬架系统。
近年来随着机械动力学、测控技术、电子技术等学科的快速发展,车辆悬架系统由传统被动隔振发展到新兴的振动主动控制。
尤其是信息科学中对模糊控制、人工神经网络、自适应控制、最优控制等的研究,悬架系统振动控制技术在现代控制理论指导变得更趋完善,同时已推广应用于车辆悬架系统的振动控制,悬架系统振动控制技术得到了快速发展。
与此同时,伴随着车辆结构和功能的不断改进和完善,研究车辆振动,设计新型悬架系统,将振动控制到最低水平是提高现代车辆品质的一项极为重要的措施。
关键词:主动悬架控制策略模糊控制ABSTRACTSuspension system is an important part of the vehicle., Vehicle suspension performance is one of the important factors,which affects vehicle’s ride comfort, handling stability and speed .Traditional passive suspension generally consists offixed paramete elastic member and damping components, it is designed to accommodate a particular surface, which limits further improvemennt of vehicle performance. in 1970s, industrial countries have begun to study active vibration control which is based on active, semi-active suspension system. In recent years, the rapid development of electronic technology, control technology, mechanical dynamics and other disciplines,makinng the vehicle suspension system develop from the traditional passive control to active vibration control.especially the research of optimal control, adaptive control, fuzzy control, artificial neural networks and other research in information science . Not only the suspension system vibration control technology which is under the guidance of mordern control is more perfect,but also it has been applied to the vehicle suspension system’s vibration control, so The suspension system vibration control technology is made to the rapid development. with the continuous improvement and perfection of the vehicle structure and function, the research of the vehicle vibration, the design of new type suspension systems, and The vibration control to the lowest level is of the most important measures to improve the quality of modern vehicles.Key words; active suspension control strategy fuzzy Control目录摘要........................................................................... 错误!未定义书签。
主动悬架安全控制技术
主动悬架安全控制技术【引言】主动控制悬架可使汽车乘坐舒适性和操纵安全性同时得到改善。
介绍了国内外汽车主动悬架系统的现状及发展,重点介绍了几种常见的控制方法。
简介:悬架系统的主要作用是有效地减缓路面不平而引起的车体振动(乘坐舒适性)以及操纵安全性。
随着汽车性能的不断完善与发展,对悬架也提出了更高的要求。
为了满足现代汽车对悬架提出的各种性能要求,悬架的结构形式一直在不断地更新和完善,尽管这样,传统的被动悬架依然受到许多限制,主要是难于同时改善在不平路面上高速行驶车辆的稳定性和行驶平顺性,即使采用优化设计也只能保证悬架在特定的激励发生变化后,悬架的性能亦随之发生变化。
事实上,被动悬架的潜力在目前已接近极限,为了克服传统的被动悬架对汽车性能改善的限制,近年来,汽车工业中出现的主动悬架成为了一条改善汽车悬架性能的新途径。
主动悬架控制系统是一个闭环控制系统,它能根据系统的运动状态和当前的激励情况,主动做出反应来控制系统的振动,在控制过程中,可以根据外界输入。
与系统状态的变化实时调节控制系统参数,以获得最好的减振效果。
主动悬架通常可分为:有源主动悬架和无源主动悬架两大类。
有源主动悬架一般又简称为主动悬架,主动悬架一般由执行机构和控制决策部分构成。
其基本原理是根据被控系统的动态特性,采用由外部输入能量的控制方法使被控系统实现减振。
主动悬架系统的执行部分一般包括液压执行机构、动力源等,执行机构上装有控制器,它执行决策部分的命令。
一般用力发生器完全地或部分地代替被动悬架中的弹簧和阻尼器。
力的大小由控制规律决定。
决策部分为一车载微机系统,包含各种传装置、测量仪器和信号反馈处理等系统。
微机接收来自传感器的信号,经预定控制程序处理后,由控制器发出命令,决定执行机构所需的动作,从而形成闭环控制。
主动悬架具有如下显著优点:(1)在悬架静扰度较小的前提下,能获得较低的固有频率和动扰度。
(2)悬架的动力学特性,不随汽车的载荷变化而改变。
车辆主动悬架最优控制

车辆主动悬架的控制研究悬架就是汽车的重要装置之一,它对汽车的平顺性、操纵稳定性、通过性等多种使用性能有着很大的影响。
设计优良的悬架系统,对提高汽车产品质量有着极其重要的意义。
目前,汽车上普遍采用的就是弹性元件与减震器组成的常规悬架,从控制力学的角度,将这种悬架称为被动悬架。
实践与研究结果都表明,常规悬架受到许多限制,即使采用优化方法来设计也只就是将其性能改善到一定程度。
为了克服常规悬架对其性能改善的限制,在汽车中采用与发展了新型的主动悬架。
主动悬架能够根据路面情况及汽车运行的实际状态进行最优反馈控制,使汽车整体行驶性能达到最佳。
主动悬架的主要特点就是能够主动提供能量,与传统被动悬架相比,其最大的优点在于具有高度的自适应性。
一、 车辆主动悬架系统建模主动悬架的分析模型如图3、3所示,图中u 为主动悬架执行机构的作用力。
主动悬架的运动微分方程为:⎪⎩⎪⎨⎧---==)(01..11..22x x k u x m u x m t (1)状态变量、输出向量的选取同被动悬架,且为了便于与被动悬架的比较分析,选取与被动悬架模型相同的输入信号,路面激励仍为选白噪声)(t ω,根据微分方程组(1),建立如下所示的状态方程与输出方程⎪⎩⎪⎨⎧+=++=Eu Cx y t D Bu Ax x )(ω。
(2)式中:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=0001000000010101m k A t ;⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=121010m m B ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0100D ;⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=010*********C ;⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=0012m E 汽车悬架可认为就是一种连续线性的随机最优控制系统,由最优线性滤波器串接确定性调节器的最优反馈增益系数矩阵组成。
这两部分参数可分别加以确定。
对于控制要求的性能指标就是二次函数积分型的调节器问题,外界干扰就是高斯白噪声,综合性能指标为:dt t u t R t u t X t Q t X u J T T ⎰∞+=0)]()()()()()([)( (3)此处认为汽车主动悬架的最优控制器为一个终端时间无限的线性调节器,问题仍就是寻找最优控制)(t u ,使目标函数J 取极小。
浅析汽车底盘主动悬架控制方法

浅析汽车底盘主动悬架控制方法【摘要】汽车底盘主动悬架控制方法是指通过各种技术手段对汽车底盘悬架系统进行控制,以实现更好的悬架性能和车辆稳定性。
本文从主动悬架的概念入手,介绍了电磁悬架、空气悬架、液压悬架以及综合控制方法。
电磁悬架通过调节电磁感应力来实现悬架调节,空气悬架利用空气压力来调节悬架高度,液压悬架则通过液压系统来实现悬架调节。
综合控制方法则结合多种技术手段,以实现更为精准和稳定的悬架控制。
通过对这些方法的分析和比较,可以为汽车底盘主动悬架控制提供更深入的理解和研究方向。
结论部分总结了各种方法的优缺点,为未来的研究和应用提供了一定的借鉴价值。
【关键词】汽车底盘,主动悬架,控制方法,电磁悬架,空气悬架,液压悬架,综合控制,引言,结论1. 引言1.1 引言车辆底盘主动悬架控制技术是现代汽车行业中的一个重要发展方向。
随着科技的进步和人们对车辆操控性能的要求不断提高,主动悬架技术被广泛应用于各种车型中。
主动悬架通过对悬架系统的实时监测和调节,能够有效地提升车辆的稳定性、舒适性和操控性能,从而提升整个车辆的性能水平。
在本文中,我们将从主动悬架的概念出发,对主动悬架的控制方法进行详细的分析和探讨。
首先我们会介绍主动悬架的基本概念和原理,以便更好地理解后续的控制方法。
然后我们将详细介绍电磁悬架、空气悬架、液压悬架等不同类型的主动悬架控制方法,探讨它们的优缺点和适用范围。
我们将介绍一些综合控制方法,即将多种控制方法结合起来,以达到更好的效果。
通过本文的阐述,相信读者能够更全面地了解汽车底盘主动悬架控制方法的原理和应用,为未来的研究和实践提供参考和借鉴。
2. 正文2.1 主动悬架的概念主动悬架是一种能够主动调整车辆悬挂系统的技术,在汽车行驶过程中可以根据道路和驾驶状况的变化,实时调整悬挂系统的硬度和高度,提高车辆的稳定性和舒适性。
主动悬架通过使用电磁、空气、液压等技术,可以实现对悬挂系统的精确控制,从而提供更加舒适和安全的驾驶体验。
汽车主动悬架系统及其控制方法
汽车主动悬架系统及其控制方法汽车乘坐舒适性和操作安全性与汽车主动悬架关系紧密,主动悬架研究及其重要。
本文介绍了主动悬架的工作原理以及主动悬架的控制方法:天棚阻尼控制、最优控制、自适应控制、滑模变结构控制、模糊控制、神经网络控制等。
预测了主动悬架系统的发展和未来趋势。
标签:主动悬架;控制方法;汽车被动悬架通常由具有确定参数的弹性元件和阻尼元件等构成,对于路面的适应性能较差,对汽车改善舒适性等方面不利。
在被动悬架设计的过程中,往往不能使乘客的乘坐舒适性与车辆的操纵稳定性同时达到最优。
在很大程度上及一些因素的影响,我国的汽车很少采用主动悬架,因为在主动及半主动悬架研究方面,我国相对来说比较落后,就技术层面来讲,主动悬架相对于被动悬架在控制方面较为复杂,研究起来比较困难,对其进一步发展产生了阻碍。
1 汽车主动悬架的工作原理汽车主动悬架可以根据路面的实时状况来进行调节,相比于被动悬架其可以调节该悬架的刚度及阻尼,使悬架找到一个最优的状态来满足舒适性及操纵稳定性。
它是在被动悬架的基础上改进而来,增加用来控制调节力的装置,通过控制系统对传遞来的一系列信号进行反馈调节力的大小进而使悬架刚度及阻尼发生变化来使乘坐舒适性及操纵稳定性同时达到最优。
2 主动悬架系统的控制方法主动悬架的控制方法有很多种,在不同的控制方法中所运用的学科知识也不相同,涉及到多种理论的分析研究。
但是,各种控制方法均有自身的独特之处,对几种主动悬架的控制方法介绍如下。
2.1 天棚阻尼器控制天棚阻尼器控制的主要方法是通过一种对力的控制来实现其功能。
该力是由主动悬架发生并且需要与该车的车体的速度成正比例关系,由于在该系统中相比其他系统多了一个固定一端的阻尼器,来作为参考,这就是天棚阻尼控制系统的大致原理和名称由来。
在该控制方法中,控制力的大小是由车体的速度传递到到力传感器的大小决定的,传感器数量不多且结构也不算复杂,更不需要多学科的交叉研究,比较容易实现其功能且使用起来相对快速。
浅析汽车底盘主动悬架控制方法

浅析汽车底盘主动悬架控制方法1. 引言1.1 概述汽车底盘主动悬架控制方法是一种能够提高车辆悬挂系统性能和舒适性的技术。
随着汽车工业的发展和人们对行车舒适性和安全性要求的提高,底盘主动悬架控制方法逐渐受到重视。
底盘主动悬架控制方法通过感知路况和车辆运动状态,采取相应的控制策略来调节悬架系统的工作状态,以提高车辆的操控性、稳定性和舒适性。
不同类型的底盘主动悬架控制方法采用不同的技术手段和控制算法,如电磁悬架、液压悬架、空气悬架等。
本文将重点介绍各种主动悬架控制方法的原理、特点和应用领域,以及不同方法之间的优缺点比较。
通过对底盘主动悬架控制方法的深入研究和分析,可以为汽车制造商和研发人员提供参考,促进底盘主动悬架技术的进一步发展和应用。
在未来,底盘主动悬架控制方法将在汽车行业发挥越来越重要的作用,为驾驶员提供更安全、舒适的驾驶体验。
1.2 研究背景汽车底盘主动悬架控制方法作为汽车底盘控制技术的一种重要手段,具有极其重要的应用价值和发展前景。
随着汽车工业的飞速发展,人们对汽车的舒适性、安全性和性能要求越来越高,传统的被动悬架系统已经不能满足人们的需求。
研究和开发底盘主动悬架控制方法成为了当前汽车工程领域的热点之一。
底盘主动悬架控制方法的研究背景主要包括以下几个方面。
随着汽车性能的提升,底盘控制技术对于提高汽车的行驶稳定性、通过性和舒适性等方面起到了至关重要的作用。
随着电子技术的不断发展和应用,底盘主动悬架控制方法可以通过精确控制悬架系统的工作状态,提高汽车的行驶性能和安全性。
底盘主动悬架控制方法可以实现不同路况下的智能调节,提高汽车通过不同路面时的适应能力和稳定性。
底盘主动悬架控制方法的研究还可以促进汽车工业的发展,推动汽车制造技术的进步,为人类社会的可持续发展做出积极贡献。
深入研究和开发底盘主动悬架控制方法具有重要的现实意义和理论意义。
1.3 研究目的研究目的是为了深入了解汽车底盘主动悬架控制方法的原理和应用,探讨不同类型的悬架控制方法的优缺点,为汽车制造商和工程师提供有效的参考和指导。
汽车悬挂系统的主动控制研究
汽车悬挂系统的主动控制研究随着汽车行业的不断发展,汽车悬挂系统的主动控制技术也越来越受到关注。
汽车悬挂系统是汽车的重要部件之一,对车辆的操控性、舒适性和安全性影响极大。
传统的汽车悬挂系统是被动式的,只能被动地适应道路状况和车辆负荷变化。
随着先进的电子控制技术的应用,汽车悬挂系统的主动控制技术不断成熟,为汽车提供了更优越的悬挂性能。
汽车悬挂系统的主动控制技术是指通过传感器获取车辆状态信息,然后由电子控制单元对悬挂系统进行实时调节,以提高车辆的操控性、舒适性和安全性。
目前,主动悬挂系统主要有主动悬挂系统、主动稳定悬挂系统和半主动悬挂系统等。
主动悬挂系统的研究可以分为两个方面,一是传感器技术的研究,二是电子控制单元的研究。
在传感器技术方面,目前广泛应用的有加速度传感器、位移传感器、压力传感器等,这些传感器可以用于获取车辆的加速度、姿态、悬挂位移、悬挂压力等信息,为电子控制单元提供数据支持。
在电子控制单元方面,研究重点是如何利用这些传感器获取的信息,实现对悬挂系统的精准控制。
需要考虑的因素包括悬挂系统的调节速度、精度、可靠性等。
在实际的汽车悬挂系统主动控制研究中,有几个关键技术问题需要解决。
首先是传感器技术的研究和应用。
传感器的准确性、稳定性和适应性将直接影响到悬挂系统的主动控制效果。
其次是电子控制单元的性能要求。
电子控制单元需要对传感器获取的信息进行快速准确的处理,并且生成合理的控制指令,以实现对悬挂系统的精准控制。
还需要考虑悬挂系统的机械结构,以确保悬挂系统的可调节性和可靠性。
在汽车悬挂系统的主动控制研究中,国内外都进行了大量的研究工作,并取得了一些进展。
在国外,许多汽车厂商和研究机构都对汽车悬挂系统的主动控制技术进行了研究和应用。
梅赛德斯-奔驰的Magic Body Control技术,通过使用立体摄像头和路面扫描技术,实现了对车辆悬挂系统的主动控制。
在国内,一些汽车厂商也开始重视汽车悬挂系统的主动控制技术研究。
汽车主动悬架及控制方法的研究
汽车的悬架系统是车辆的重要组成部分,汽车悬架性能的好坏直接影响汽车行驶的平顺性和操纵稳定性,传动的被动悬架系统,由于参数不可调节,对多变环境中工作的汽车难以满足期望的性能要求。
因此,为了克服被动悬架对汽车性能改善的限制,近年来出现了主动悬架系统。
主动悬架能够根据工况变化,实时主动地调整和产生所需的悬架控制力,以抑制车身的振动,使悬架处于最优减振状态,达到同时改善汽车行驶平顺性和操纵稳定性的目的。
近年来随着机械动力学、测控技术、电子技术等学科的快速发展,尤其是信息科学中对模糊控制、人工神经网络、自适应控制、最优控制等的研究,悬架系统控制技术得到了快速发展。
本文对汽车的模糊控制、自适应控制、神经网络控制、智能控制以及复合控制等多种控制方法进行了叙述,并以模糊控制在汽车主动悬架中的应用为例,详细叙述了模糊控制的有关知识,希望可以加深对汽车主动悬架及相关控制方法和策略的研究。
关键词:主动悬架,控制策略,模糊控制Automotive suspension system is an important part of the vehicle, it’s performanc e has a direct impact on the exercise of the car ride and handling stability. due to the passive suspension system parameters can not be adjusted for the changing work environment ,it is difficult to meet the desired performance requirements, however,Active suspension can take the initiatives to adjust the suspension in real time according to changing conditions ,and produces the desired control to suppress the vibration of the body, so that the optimal damping suspension can be kept in the best state to improve vehicle ride comfort and handling stabilitypurposes simultaneously. In recent years, along with the development of the me dynamics, measurement and control technology, electronic technology disciplines, and the rapid development of information science, especially the studies of the fuzzy control, artificial neural networks, adaptive control, optimal control, suspension system control technology which is in modern theoretical guidance, becomes more perfect, suspension control system technology has developed rapidly, the vehicle fuzzy control, adaptive control, neural network control, intelligent control and composite control and other control methods are In this paper ,in order to deepen the understanding of vehicle active suspension control methods and strategies and related researches,the fuzzy control in automotive active suspension system was described as an example in this paper .Key words : active suspension, fuzzy Control, control strategy目录前言 (1)1车辆悬架概述 (2)1.1车辆悬架的定义、作用及性能要求 (2)1.1.1车辆悬架的定义 (2)1.1.2车辆悬架的作用 (2)1.1.3车辆悬架系统的性能要求 (3)1.2车辆悬架的组成 (3)1.2.1弹簧 (3)1.2.2减震器 (4)1.2.3稳定杆 (4)1.3车辆悬架的类型 (4)1.3.1被动悬架 (5)1.3.2半主动悬架 (5)1.3.3主动悬架 (6)1.3.4主动悬架的优点 (7)1.3.5主动悬架主要元件及工作原理 (8)1.4主动悬架的控制功能 (11)1.4.1车速路面感应控制 (11)1.4.2车身姿态控制 (12)1.4.3车身高度控制 (13)1.5主动悬架研究与发展状况 (14)1.5.1主动悬架的研究现状 (14)1.5.2主动悬架发展状况 (15)2主动悬架控制及策略 (18)2.1自适应控制 (18)2.2神经网络控制 (19)2.3 PID控制 (20)2.4最优控制 (22)2.5鲁棒控制 (24)2.6遗传算法 (24)2.7复合控制 (25)3模糊控制在主动悬架中的应用 (26)3.1模糊控制的技术原理 (26)3.1.1模糊控制系统的组成 (26)3.1.2模糊控制基本原理 (27)3.1.3模糊控制器的结构设计 (31)4总结 (33)致谢 (34)参考文献 (35)前言随着汽车工业的发展,人们对汽车的乘坐舒适性和操纵稳定性提出了更高的要求,而车辆悬架决定和影响着车辆行驶的平顺性、操纵稳定性和乘坐舒适性。
题目:汽车主动悬架及控制方法

汽车悬架的性能要求
• • • • (1)保证汽车有良好的行驶平顺性。 (2)有合适的减震性能。 (3)保证汽车有良好的操纵稳定性。 (4)汽车制动和加速时能够保证车身稳定,减少 车身纵向倾斜(“点头”或“后仰”)的可能性。 • (5)能够可靠地传递车身和车轮之间的一切力和 力矩,零部件足够轻并有一定的强度和寿命,保 证轮胎的正行和减少轮胎磨损的能力。
主动悬架研究与发展状况
1)主动悬架的研究现状 主动悬架的研究也是集中在主动悬架的可靠 性和执行器上,同时,还必须对悬架系统最佳 参数控制及理论进行研究。 (1)可靠性研究 主动悬架采用了大量的传感器,单片机,输 入输出电路和各种接口,由于原件比较多,降 低了悬架的可靠性,所以,加大元件的集成度, 增加可靠性,降低成本,是主动悬架研究不可 逾越的一个阶段。
运用电磁蓄能原理结合参数估计自校正控制器可望设计出高性能的电磁蓄能式自适应主动悬架使主动悬架由理论研究转换为实际运主动悬架研究与发展状况3悬架系统控制理论研究主动悬架需要对悬架参数进行检测所采用的许多控制方法由天棚阻尼控制pid控制最优控制自适应控制神经网络控制滑膜变结构控制模糊控制预测控制等因此必须根据车架类型悬架结构减震器的类型对控制方法和控制理论进行研究选择最佳控制策略和控制方法Fra bibliotek2)半主动悬架
• 基本原理:用可调刚度弹簧或可调阻尼的减震器 组成悬架,并根据弹簧载质量度加速度响应等反 馈信号,按照一定的规律调节弹簧的刚度或减震 器的阻尼,从而达到较好的减震效果 。 • 作用:半主动悬架由无源但可控制的阻尼元件组 成,在车辆悬架中,弹性元件除了吸收和存储能 量外,还得承受车身载荷和重量。
车身高度控制
车身高度控制分为常规和高两种控制方式, 每种控制方式中按车身的高度从高到低的顺序分 为低、中、高3种状态。在常规模式中,车身高度 经常处于中状态,而在高模式中,车身高度又经 常处于高状态。 在通常情况下,车身高度不受乘员人数和装 载质量的变化影响,由微机控制在保持在所选模 式的经常状态高度。在高速行驶或连续坏路面行 驶时,车身高度根据所选择的不同模式,由微机 控制在低、中、高3种状态之间自行调节。使汽车 经常处于稳定行驶状态。这种控制包括高速感应 控制和连续坏路面行驶控制两种控制功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主动悬架发展状况
2)ABC主动车身控制悬架系统 ABC(ACTIVE BODY CONTROL)主动车 身控制悬架系统是比较先进的主动悬架的代表。 它是通过感应微型的车轮及车身的动作,在任何 大的车身振动之前,及时对悬架系统进行调整, 保持车身的平衡,简称主动式车身控制悬架系统, 即ABC,该系统能很好的适应各种路面,在异常崎 岖不平的路面,车辆也能保持优良的操作性,舒 适性及方向稳定性。
主动悬架研究与发展状况
1)主动悬架的研究现状 主动悬架的研究也是集中在主动悬架的可靠 性和执行器上,同时,还必须对悬架系统最佳 参数控制及理论进行研究。 (1)可靠性研究 主动悬架采用了大量的传感器,单片机,输 入输出电路和各种接口,由于原件比较多,降 低了悬架的可靠性,所以,加大元件的集成度, 增加可靠性,降低成本,是主动悬架研究不可 逾越的一个阶段。
主动悬架示意图
主动悬架所具备的条件
• • • (1)具有能够产生作用力的作用源. (2)执行元件能够传递这个作用力并能 连续工作. (3)具有多种传感器并将有关数据集中 到微型计算机中运算并决定控制方式
主动悬架的模型
• 在图中,为簧上质量;为簧下质量;为悬 架阻尼;为轮胎刚度;、和分别表示以静 态平衡点为参考位置的簧上质量、簧下质 量和路面激励的垂直位移。
车身姿态控制的3种控制功能
3)抑制起步时车身俯仰 当突然起步或从低速情况下突然加速时, 应增加悬架的刚度和阻尼,以抑制车身的 俯仰。在车速低于20KM/H时突然加速。加 速度大时,节气门开度传感器的信号和相 应的车速信号传给微机,微机向悬架发出 指令。此时如果悬架处于“软”状态,则 从低状态进入高状态。如果这时处于运动 模式,则从低状态进入高状态。
(2)半主动悬架
• 基本原理:用可调刚度弹簧或可调阻尼的减震器 组成悬架,并根据弹簧载质量度加速度响应等反 馈信号,按照一定的规律调节弹簧的刚度或减震 器的阻尼,从而达到较好的减震效果 。 • 作用:半主动悬架由无源但可控制的阻尼元件组 成,在车辆悬架中,弹性元件除了吸收和存储能 量外,还得承受车身载荷和重量。
车速路面感应控制的3种控制功能
• 3)坏路面感应控制能力 汽车以40-100KM/H速度突然驶上坏路面时, 车身高度传感器会立即给出周期小于0.5秒的车高 变化信号。微机分析车速传感器和车高传感器的 信号后发出指令,如果驾驶员选择的是“软”模 式,则悬架从低状态进入中状态;如果选择的是 运动模式,则悬架保持中状态。 当车速以100KM/H以上的速度行驶在坏路面 上时,如果选择的是运动模式,则悬架从中状态 进入高状态。
汽车悬架的性能要求
• • • • (1)保证汽车有良好的行驶平顺性。 (2)有合适的减震性能。 (3)保证汽车有良好的操纵稳定性。 (4)汽车制动和加速时能够保证车身稳定,减少 车身纵向倾斜(“点头”或“后仰”)的可能性。 • (5)能够可靠地传递车身和车轮之间的一切力和 力矩,零部件足够轻并有一定的强度和寿命,保 证轮胎的正行和减少轮胎磨损的能力。
车身姿态控制的3种控制功能
2)抑制制动时车身点头 在紧急制动时,应增加悬架的刚度和阻尼, 以减少车身的点头。在车速高于60KM/H是的情况 下突然踏制动踏板时,车速传感器发出相应的车 速信号和制动开关发出的阶跃信号同时传给微机, 微机向悬架发出命令。如果此时悬架处于“软” 模式下则从低状态直接进入高状态;若悬架处于 运动模式,则从低状态进入高状态,以抑制车身 前部的俯仰。
主动悬架研究与发展状况
(2)执行器研究 执行器的研究主要是用电动器件代替液 压器件。电器动力系统中的直线伺服电机 和永磁直流直线伺服电机具有较多的优点, 今后将取代液压执行元件。运用电磁蓄能 原理,结合参数估计自校正控制器,可望 设计出高性能的电磁蓄能式自适应主动悬 架,使主动悬架由理论研究转换为实际运 用。
(2)半主动悬架
分类:半主动悬架分为刚度可调和阻尼可调 两大类。 阻尼可调半主动悬架又可以分为有级可调半 主动悬架和连续可调半主动悬架 应用:半主动悬架结构简单,成本低,在工 作时几乎不消耗车辆动力,又能获得与主 动悬架相近的性能,因而具有巨大的发展 潜力,故应用较广
(3)主动悬架
• 1.定义及作用:主动悬架由在悬架系统中采 用有源或无源可控制的元件组成。它是一 个闭环控制系统,根据车辆悬架的运动状 态和路面状况,由中央控制单元ECU实时 进行运算,而后ECU马上对减震器发出命 令,主动做出反应,控制车辆悬架参数,使悬架 始终处于最优减震状态,并抑制和控制车身 震动,当汽车震动和转弯时的惯性引起弹簧 变形时,主动悬架系统会产生一个与惯性力 相对抗的力,减少车身位置的变化.
主动悬架发展状况
3)BOSE新型主动悬架系统 BOSE新型主动悬架系统在每个车轮处使用 一个线性电磁电机(LEM)取代了传统的减震器和 弹簧装置。放大器以随着系统的每次压缩重新产 生动力的方式向电机提供动力。这种电机的优点 是不受传统液压式减震器固有惯性限制。因此, LEM能够以更快的速度伸缩,从而几乎完全消除 了车厢的振动。车轮运动可以控制的如此之好, 以至于不管车轮发生什么情况车身都能保持平稳, LEM还可以抵消车轮加速,制动和转弯是车身的 运动,为驾驶员提供更美妙的操控体验。
主动悬架发展状况
随着电子技术的发展,目前研制开发的新型主动悬 架有可变特性手动控制悬架,电控主动控制液压悬架, 电控主动空气悬架,ABC主动车身控制悬架系统, BOSE新型主动悬架系统等几种。 1)可变特性手动控制悬架 可变特性手动控制悬架是根据车辆运行条件和路况, 以手动控制悬架特性。手动开关可以选择以下两种档位。 (1)STOP档位,刚性好,相当于高级跑车的悬架特性。 (2)TOURING档位,柔性好,相当于高级旅行车的悬架特 性。
车身姿态控制的3种控制功能
1)抑制转向时车身侧倾 在急转向情况下,应增加悬架的刚度和阻尼, 以减少车身的侧倾。当驾驶员突然打转向盘时, 安装在转向盘上的转向传感器把检测到的转向盘 转角机器速度变化传给微机,微机对悬架发出指 令,通过执行元件使悬架刚度和减振器的阻尼力 转换到高状态。如果悬架处于“软”模式,则从 中状态或低状态直接进入高状态。如果悬架处于 运动模式,则从中状态进入高状态。
车辆悬架的组成
• 典型的悬架系统结构由弹簧,减震器,导 向机构及稳定杆等组成,个别机构中还有 缓冲块。 (1)弹簧 悬架弹簧的软硬对车辆行驶的 安全性和乘坐舒适性有重要的影响。 现在的弹簧系统均以钢板弹簧,螺旋弹簧, 扭杆弹簧或
• 减震器也称为缓冲器,它通过一种称为阻 尼的过程来控制不希望发生的弹簧运动。 减震器通过悬架运动的能量转换为可通过 液压油散热的热能,来降低和减少车辆的 振动。 按不同的结构,工作介质和作用方式等, 减震器有不同的分类。
悬架分类示意图
非独立悬架系统 悬架系统 独立悬架系统
被动悬架
有级式半主动悬架
悬架系统
半主动悬架 主动悬架 无级式半主动悬架
(1)被动悬架
• 被动悬架, 由弹性元件和不可变参数的减振器组成, 只能在特定工况下达到最优, 缺少对变载荷、变车 速、不可预测路况的适应性。 缺点:被动悬架是传统的机械结构,由弹簧、减震 器和导向机构组成。被动悬架的刚度和阻尼系数 均不可调,只能在特定的工况下达到最优减振效 果,存在明显的共振峰,难以同时获得良好的乘 坐舒适性和操纵稳定性,缺乏灵活性。 优点:结构简单、设计容易和制造方便,且无须额 外的能量输入,目前在中低档轿车上应用最为广 泛
主动悬架的控制功能
• (1)车速路面感应控制 车速路面感应控制主要随着车速和路面的变化改 变悬架的刚度和阻尼,使之处于“软”或运动模 式。每种模式按照刚度和阻尼的大小依次有低, 中,高3种状态。在“软”模式中,悬架经常处于 低刚度和低阻尼的低状态,在运动模式中,悬架 经常保持在中状态。按照两种不同的控制方式, 悬架由微型计算机控制在3种状态之间,根据车速 和路面的变化情况自动地调整悬架高度和阻尼系 数,使车身的振动可能达到的最佳值。
车速路面感应控制的3种控制功能
• 2)前后车轮关联感应控制 车速在30-80KM/H时,如果前轮遇到障碍时,安装在 汽车前部的车身高度传感器将脉冲信号送给微机,微机经 过分析后发出命令,令悬架改变刚度,阻尼等参数。如果 驾驶员选择的是“软”模式,则后轮的悬架保持在低状态; 如果选择的是运动状态,则后轮悬架从中状态进入低状态, 从而提高汽车的乘坐舒适性。当后轮越过障碍后,悬架又 回到选定模式经常保持的状态。 但是当车速很高时,如果悬架太软则车轮遇到冲击时, 汽车容易丧失操纵稳定性,所以当车速超过80KM/H时, 无论选择何种模式,悬架参数都应该保持在中状态不变。
车身高度控制
车身高度控制分为常规和高两种控制方式, 每种控制方式中按车身的高度从高到低的顺序分 为低、中、高3种状态。在常规模式中,车身高度 经常处于中状态,而在高模式中,车身高度又经 常处于高状态。 在通常情况下,车身高度不受乘员人数和装 载质量的变化影响,由微机控制在保持在所选模 式的经常状态高度。在高速行驶或连续坏路面行 驶时,车身高度根据所选择的不同模式,由微机 控制在低、中、高3种状态之间自行调节。使汽车 经常处于稳定行驶状态。这种控制包括高速感应 控制和连续坏路面行驶控制两种控制功能。
主动悬架的优点
• (1)主动悬架汇集了力学和电子学的技术知识,是一种比较复杂的高 技术装备,例如法国桑蒂雅车装备了主动悬架系统,该悬架系统的中枢 是一个微型计算机,5种传感器分别向微型计算机传送速度,前轮制动压 力,踏动油门踏板的速度,车身垂直方向的振幅及频率,转向盘角度及转 向速度等数据,微型计算机不断的接受数据并与预先设定的临界值比较, 选择相应的悬架系统状态.同时,微型计算机独立控制每一只车轮上的 执行元件,通过控制减震器内的油压的变化而产生抽动,从而能在任何 时候,任何车辆上产生符合要求的悬架系统运动.因此,该悬架系统有多 重驾驶模式,驾车者只要扣动位于副仪表盘上的“正常”或“运动”按 钮,轿车就会自动设置在最佳的悬架系统状态,以求最好的舒适性能。 • (2)主动悬架还有控制车身运动的功能,当汽车制动或转弯时的惯 性引起弹簧变形时,主动悬架系统会产一个力与惯性力对抗,减少车 身位置的变化,例如德国奔驰2000款C1型跑车,当车辆转弯时悬架 系统传感器会立即检测出车身的倾斜和横向加速度,微型计算机根据 传感器的消息,与预先设定的临界值进行比较,立即确定在什么位置 上以多大的负载加到悬架系统上,使车身的倾斜减到最小。