STM32F3xx 硬件开发入门_中文资料
第4章STM32开发基础知识总结
第4章STM32开发基础知识总结STM32是一款由STMicroelectronics开发的基于ARM Cortex-M内核的32位单片机系列。
它具有丰富的外设和强大的性能,被广泛应用于嵌入式系统开发领域。
本章主要介绍了STM32开发的基础知识,包括STM32的主要特点、STM32的系统结构、STM32的寄存器、中断和时钟系统等。
在这些内容中,我们可以看到STM32的强大功能和灵活调整的性能。
首先,STM32的主要特点是高性能、低功耗和易于扩展。
它具有高速的CPU、丰富的外设、多种存储器、多种通信接口等特点,可以满足不同嵌入式系统的需求。
此外,STM32采用高级微控制器接口规则(Advanced Microcontroller Bus Architecture, AMBA),使得不同外设可以方便地进行通信和控制,提高了系统的整体性能和可靠性。
另外,STM32还具有低功耗和易于扩展的特点,并且支持多种不同的睡眠模式,可以根据实际需求来管理能量消耗和系统功能。
其次,STM32的系统结构主要由核心和外设组成。
核心是STM32的处理器单元,基于ARM的Cortex-M内核,包括处理器、存储器和调试接口等。
外设是与核心进行通信和控制的设备,包括GPIO、串口、I2C、SPI 等。
在STM32中,外设被映射到特定的地址空间,可以通过读写这些地址来进行控制和数据传输。
此外,STM32还支持内存映射和外设映射,可以方便地访问外部存储器和外设。
第三,STM32的寄存器用于配置和控制外设的功能。
每个外设都有一组寄存器,用于存储和读取外设的状态和配置信息。
在STM32中,寄存器可以通过寄存器地址进行直接访问,也可以通过寄存器定义和结构体来进行访问。
通过配置寄存器,可以设置外设的工作模式、时钟频率、中断使能等。
通过读取寄存器,可以获取外设的状态、数据和中断信息。
寄存器操作是STM32开发中的重要部分,需要熟练掌握和灵活运用。
STM32中文参考手册 80

互联型产品的复位和时钟控制(RCC) STM32F10xxx参考手册图11时钟树
1.当HSI被用于作为PLL时钟的输入时,系统时钟能得到的最大频率是36MHz。
2.对于内部和外部时钟源的特性,请参考相应产品数据手册中“电气特性”章节。
高级时钟控制器拥有3个PLL,为使用外部晶体或振荡器提供了高度的灵活性,使得核心和外设能够工作在最高的频率,同时保证以太网和全速的USB OTG能够有合适的时钟。
一个单一的25MHz晶体可以为整个系统和所有包括以太网和全速USB OTG的外设提供时钟。
为了实现高质量的音频性能,可以使用一个音频晶体;这样,I2S的主时钟可以产生所有从8kHz至96kHz之间的标准采样频率,而误差小于0.5%。
更多关于以太网、全速USB OTG和/或I2S(音频)时钟配置的需求,请参考互联型产品数据手册的“附录A 应用框图”。
用户可通过多个预分频器配置AHB、高速APB(APB2)和低速APB(APB1)域的频率。
AHB和APB2域的最大频率是72MHz。
APB1域的最大允许频率是36MHz。
除去以下情况,所有外设的时钟都是从系统时钟(SYSCLK)得到:
● Flash存储器编程接口时钟始终是HSI时钟。
80/754
参照2009年12月 RM0008 Reference Manual 英文第10版本译文仅供参考,如有翻译错误,请以英文原稿为准。
请读者随时注意在ST网站下载更新版本。
STM32快速入门教程
STM32快速入门教程STM32是一种微控制器系列,由意法半导体(STMicroelectronics)公司推出。
它具有高性能、低功耗和丰富的外设功能,非常适合用于各种嵌入式应用。
本文将介绍STM32的快速入门教程,帮助读者快速上手使用STM32进行开发。
准备好硬件和软件环境后,我们可以开始编写程序了。
首先,我们需要创建一个新工程。
在Keil中,选择“Project”->“New uVision Project”,然后选择STM32的型号和储存路径。
在STM32CubeIDE中,选择“File”->“New”->“STM32 Project”,然后按照向导创建新工程。
接下来,我们需要配置工程的设置。
包括选择编译器、指定目标芯片型号、选择运行频率等。
在Keil中,选择“Options”->“Device”,然后选择目标芯片型号。
在STM32CubeIDE中,选择“Project”->“Properties”,然后选择目标芯片型号和运行频率。
配置完成后,我们需要编写代码。
在Keil中,选择“Project”->“Add New Item”,然后选择一个空白文件。
在STM32CubeIDE中,选择“File”->“New”->“Source File”,然后输入文件名。
编写代码时,我们可以使用STM32固件库提供的函数库,简化了底层驱动的编写。
编写代码的时候,我们需要定义引脚的用途和功能。
在Keil中,选择“Project”->“Manage”->“Board Selector”,然后选择目标芯片和功能。
在STM32CubeIDE中,选择“Pinout & Configuration”,然后选择功能和引脚。
接下来,我们可以测试编写的代码了。
我们可以使用串口输出、LED 闪烁等方式进行测试。
在Keil中,选择“View”->“Serial Window”,然后选择波特率和串口号。
STM32从入门到精通
STM32从⼊门到精通前⾔:还记得⼤学⽼师跟我说过的⼀句话,嵌⼊式这个⾏业越学越觉得⾃⼰懂得太少。
这也许就是我们要树⽴终⽣学习的⽬标和动⼒吧!我所理解的精通就是对崇尚的技术永⽆⽌境地追求。
⼀、相识STM32STM32这款由ST公司开发的32位微控制器,是继51单⽚机后第⼀款我为之痴迷的经典MCU。
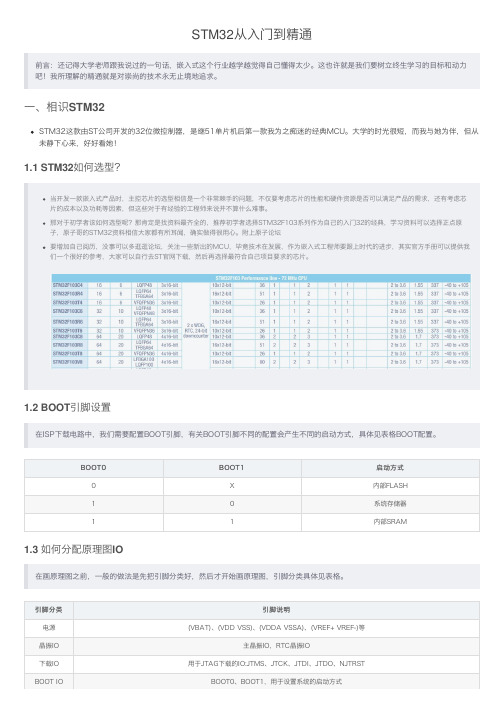
⼤学的时光很短,⽽我与她为伴,但从未静下⼼来,好好看她!1.1 STM32如何选型?当开发⼀款嵌⼊式产品时,主控芯⽚的选型相信是⼀个⾮常棘⼿的问题,不仅要考虑芯⽚的性能和硬件资源是否可以满⾜产品的需求,还有考虑芯⽚的成本以及功耗等因素,但这些对于有经验的⼯程师来说并不算什么难事。
那对于初学者该如何选型呢?那肯定是找资料最齐全的,推荐初学者选择STM32F103系列作为⾃⼰的⼊门32的经典,学习资料可以选择正点原⼦,原⼦哥的STM32资料相信⼤家都有所⽿闻,确实做得很⽤⼼。
附上原⼦论坛要增加⾃⼰阅历,没事可以多逛逛论坛,关注⼀些新出的MCU,毕竟技术在发展,作为嵌⼊式⼯程师要跟上时代的进步,其实官⽅⼿册可以提供我们⼀个很好的参考,⼤家可以⾃⾏去ST官⽹下载,然后再选择最符合⾃⼰项⽬要求的芯⽚。
1.2 BOOT引脚设置在ISP下载电路中,我们需要配置BOOT引脚,有关BOOT引脚不同的配置会产⽣不同的启动⽅式,具体见表格BOOT配置。
BOOT0BOOT1启动⽅式0X内部FLASH10系统存储器11内部SRAM1.3 如何分配原理图IO在画原理图之前,⼀般的做法是先把引脚分类好,然后才开始画原理图,引脚分类具体见表格。
引脚分类引脚说明电源(VBAT)、(VDD VSS)、(VDDA VSSA)、(VREF+ VREF-)等晶振IO主晶振IO,RTC晶振IO下载IO⽤于JTAG下载的IO:JTMS、JTCK、JTDI、JTDO、NJTRSTBOOT IO BOOT0、BOOT1,⽤于设置系统的启动⽅式引脚分类引脚说明复位IO NRST,⽤于外部复位GPIO专⽤器件接到专⽤的总线,⽐如I2C,SPI,SDIO,FSMC,DCMI这些总线的器件需要接到专⽤的IO1.4 如何寻找IO的功能说明要想根据功能来分配 IO,那就得先知道每个 IO 的功能说明,这个我们可以从官⽅的数据⼿册⾥⾯找到。
普中STM32F1xx开发攻略

目录
普中 STM32F1xx 开发攻略................................................................................................................. 1 目录..................................................................................................................................................... 2 第 1 章 如何使用本攻略................................................................................................................... 1 第 2 章 开发板功能及使用介绍....................................................................................................... 4 2.1 开发板功能介绍.................................................................................................................. 5 2.1.1 PZ6806L 开发板......................................................................................................... 5 2.1.2 P
STM32入门教程

STM32入门教程STM32是一款由意法半导体(STMicroelectronics)开发的32位微控制器系列。
它是一种广泛应用于嵌入式系统设计的芯片,具有高性能、低功耗、丰富的外设接口以及可编程的特点。
对于初学者来说,入门STM32可能会有一定的难度。
本篇教程将逐步介绍STM32的基本知识和入门方法,帮助初学者快速上手。
第一部分:STM32简介在入门STM32之前,我们首先了解一些基本的背景知识。
STM32系列采用了ARM Cortex-M内核,具有不同的系列和型号,例如STM32F1xx、STM32F4xx等。
不同的系列和型号拥有不同的性能和外设接口,所以在选型时需要根据具体需求进行选择。
第二部分:开发环境搭建第三部分:编写第一个程序第四部分:外设的使用STM32拥有丰富的外设接口,包括GPIO、UART、SPI、I2C等。
在这一部分,我们将详细介绍如何使用这些外设。
以GPIO为例,我们将学习如何配置GPIO引脚的输入输出模式,如何控制GPIO引脚的高低电平,以及如何使用外部中断功能。
类似地,我们还将介绍UART、SPI和I2C等外设的使用方法。
第五部分:中断的处理中断是STM32中一个非常重要的特性。
它可以让我们在程序运行的同时,对外部事件做出及时的响应。
本节我们将学习如何配置和使用中断。
首先,我们需要了解中断向量表和中断优先级的概念。
然后,学习如何编写中断处理函数,并配置和启用中断。
最后,通过一个例子,演示如何使用中断来处理外部事件,例如按键的按下和释放。
第六部分:时钟和定时器时钟和定时器是嵌入式系统中非常重要的功能模块。
STM32提供了多个时钟源和定时器模块,可以用于各种定时任务和时序要求。
在这一部分,我们将学习如何配置时钟源和时钟分频器,以及如何配置和使用定时器。
通过一个实例,我们将学习如何使用定时器来产生精确的延时和周期性的中断信号。
第七部分:存储器和编程方法STM32拥有多种存储器类型,包括闪存、RAM和EEPROM等。
STM32固件库使用手册的中文翻译
UM0427用户手册之迟辟智美创作32位基于ARM微控制器STM32F101xx与STM32F103xx固件函数库介绍本手册介绍了32位基于ARM微控制器STM32F101xx与STM32F103xx的固件函数库.该函数库是一个固件函数包,它由法式、数据结构和宏组成,包括了微控制器所有外设的性能特征.该函数库还包括每一个外设的驱动描述和应用实例.通过使用本固件函数库,无需深入掌握细节,用户也可以轻松应用每一个外设.因此,使用本固态函数库可以年夜年夜减少用户的法式编写时间,进而降低开发本钱.每个外设驱动都由一组函数组成,这组函数覆盖了该外设所有功能.每个器件的开发都由一个通用API (application programming interface 应用编程界面)驱动,API对该驱动法式的结构,函数和参数名称都进行了标准化.所有的驱动源代码都符合“Strict ANSIC”标准(项目于范例文件符合扩充ANSIC标准).我们已经把驱动源代码文档化,他们同时兼容MISRAC 标准(根据需要,我们可以提供兼容矩阵).由于整个固态函数库依照“Strict ANSIC”标准编写,它不受分歧开发环境的影响.仅对话启动文件取决于开发环境.该固态函数库通过校验所有库函数的输入值来实现实时毛病检测.该静态校验提高了软件的鲁棒性.实时检测适合于用户应用法式的开发和调试.但这会增加了本钱,可以在最终应用法式代码中移去,以优化代码年夜小和执行速度.想要了解更多细节,请参阅Section 2.5.因为该固件库是通用的,而且包括了所有外设的功能,所以应用法式代码的年夜小和执行速度可能不是最优的.对年夜大都应用法式来说,用户可以直接使用之,对那些在代码年夜小和执行速度方面有严格要求的应用法式,该固件库驱动法式可以作为如何设置外设的一份参考资料,根据实际需求对其进行调整.此份固件库用户手册的整体架构如下:⏹界说,文档约定和固态函数库规则.⏹固态函数库概述(包的内容,库的架构),装置指南,库使用实例.⏹固件库具体描述:设置架构和每个外设的函数.STM32F101xx和STM32F103xx在整个文档中被写作STM32F101x.本用户手册和固态函数库依照以下章节所描述的规范编写.1.1缩写Table 1. 本文档所有缩写界说缩写外设/单位CAN控制器局域网模块DMA直接内存存取控制器EXTI外部中断事件控制器FLASH闪存存储器GPIO通用输入输出I2C内部集成电路IWDG自力看门狗NVIC嵌套中断向量列表控制器PWR电源/功耗控制RCC复位与时钟控制器RTC实时时钟SPI串行外设接口SysTick系统嘀嗒按时器TIM通用按时器TIM1高级控制按时器USART通用同步异步接收发射端1.2命名规则固态函数库遵从以下命名规则:PPP暗示任一外设缩写,例如:ADC.更多缩写相关信息参阅章节1.1 缩写.系统、源法式文件和头文件命名都以“stm32f10x_”作为开头,例如:stm32f10x_conf.h.常量仅被应用于一个文件的,界说于该文件中;被应用于多个文件的,在对应头文件中界说.所有常量都由英文字母年夜写书写.寄存器作为常量处置.他们的命名都由英文字母年夜写书写.在年夜大都情况下,他们采纳与缩写规范与本用户手册一致.外设函数的命名以该外设的缩写加下划线为开头.每个单词的第一个字母都由英文字母年夜写书写,例如:SPI_SendData.在函数名中,只允许存在一个下划线,用以分隔外设缩写和函数名的其它部份.名为PPP_Init的函数,其功能是根据PPP_InitTypeDef中指定的参数,初始化外设PPP,例如TIM_Init.名为PPP_DeInit的函数,其功能为复位外设PPP的所有寄存器至缺省值,例如TIM_DeInit.名为PPP_StructInit的函数,其功能为通过设置PPP_InitTypeDef 结构中的各种参数来界说外设的功能,例如:USART_StructInit.名为PPP_Cmd的函数,其功能为使能或者失能外设PPP,例如:SPI_Cmd.名为PPP_ITConfig的函数,其功能为使能或者失能来自外设PPP某中断源,例如:RCC_ITConfig.名为PPP_DMAConfig的函数,其功能为使能或者失能外设PPP的DMA接口,例如:TIM1_DMAConfig.用以配置外设功能的函数,总是以字符串“Config”结尾,例如GPIO_PinRemapConfig.名为PPP_GetFlagStatus的函数,其功能为检查外设PPP某标识表记标帜位被设置与否,例如:I2C_GetFlagStatus.名为PPP_ClearFlag的函数,其功能为清除外设PPP标识表记标帜位,例如:I2C_ClearFlag.名为PPP_GetITStatus的函数,其功能为判断来自外设PPP的中断发生与否,例如:I2C_GetITStatus.名为PPP_ClearITPendingBit的函数,其功能为清除外设PPP中断待处置标识表记标帜位,例如:I2C_ClearITPendingBit.1.3编码规则本章节描述了固态函书库的编码规则.固态函数库界说了24个变量类型,他们的类型和年夜小是固定的.在文件stm32f10x_type.h中我们界说了这些变量:typedef signed long s32;typedef signed short s16;typedef signed char s8;typedef signed long const sc32; /* Read Only */typedef signed short const sc16; /* Read Only */typedef signed char const sc8; /* Read Only */typedef volatile signed long vs32;typedef volatile signed short vs16;typedef volatile signed char vs8;typedef volatile signed long const vsc32; /* Read Only */typedef volatile signed short const vsc16; /* Read Only */typedef volatile signed char const vsc8; /* Read Only */typedef unsigned long u32;typedef unsigned short u16;typedef unsigned char u8;typedef unsigned long const uc32; /* Read Only */typedef unsigned short const uc16; /* Read Only */typedef unsigned char const uc8; /* Read Only */typedef volatile unsigned long vu32;typedef volatile unsigned short vu16;typedef volatile unsigned char vu8;typedef volatile unsigned long const vuc32; /* Read Only */typedef volatile unsigned short const vuc16; /* Read Only */typedef volatile unsigned char const vuc8; /* Read Only */在文件stm32f10x_type.h中,布尔形变量被界说如下:Typedef enum{FALSE = 0,TRUE = !FALSE} bool;1.3.3 标识表记标帜位状态类型在文件stm32f10x_type.h中,我们界说标识表记标帜位类型(FlagStatus type)的2个可能值为“设置”与“重置”(SET or RESET).typedef enum{RESET = 0,SET = !RESET} FlagStatus;1.3.4 功能状态类型在文件stm32f10x_type.h中,我们界说功能状态类型(FunctionalState type)的2个可能值为“使能”与“失能”(ENABLE or DISABLE).typedef enum{DISABLE = 0,ENABLE = !DISABLE} FunctionalState;1.3.5 毛病状态类型在文件stm32f10x_type.h中,我们毛病状态类型类型(ErrorStatus type)的2个可能值为“胜利”与“犯错”(SUCCESS or ERROR).Typedef enum{ERROR = 0,SUCCESS = !ERROR} ErrorStatus;1.3.6 外设用户可以通过指向各个外设的指针访问各外设的控制寄存器.这些指针所指向的数据结构与各个外设的控制寄存器规划一一对应.外设控制寄存器结构文件stm32f10x_map.h包括了所有外设控制寄存器的结构,下例为SPI寄存器结构的声明:/* Serial Peripheral Interface */typedef struct{vu16 CR1;u16 RESERVED0;vu16 CR2;u16 RESERVED1;vu16 SR;u16 RESERVED2;vu16 DR;u16 RESERVED3;vu16 CRCPR;u16 RESERVED4;vu16 RXCRCR;u16 RESERVED5;vu16 TXCRCR;u16 RESERVED6;} SPI_TypeDef;寄存器命名遵循上节的寄存器缩写命名规则.RESERVEDi(i为一个整数索引值)暗示被保管区域.外设声明文件stm32f10x_map.h包括了所有外设的声明,下例为SPI外设的声明:#ifndef EXT#DefineEXT extern#endif......#define PERIPH_BASE ((u32)0x40000000)#define APB1PERIPH_BASE PERIPH_BASE#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)....../* SPI2 Base Address definition*/#define SPI2_BASE (APB1PERIPH_BASE + 0x3800)....../* SPI2 peripheral declaration*/#ifndef DEBUG......#ifdef _SPI2 #define SPI2 ((SPI_TypeDef *) SPI2_BASE)#endif /*_SPI2 */......#else /* DEBUG */…...#ifdef _SPI2EXT SPI_TypeDef *SPI2;#endif /*_SPI2 */…...#endif /* DEBUG */如果用户希望使用外设SPI,那么必需在文件stm32f10x_conf.h中界说_SPI标签.通过界说标签_SPIn,用户可以访问外设SPIn的寄存器.例如,用户必需在文件stm32f10x_conf.h中界说标签_SPI2,否则是不能访问SPI2的寄存器的.在文件stm32f10x_conf.h中,用户可以依照下例界说标签_SPI 和_SPIn.#define _SPI#define _SPI1#define _SPI2每个外设都有若干寄存器专门分配给标识表记标帜位.我们依照相应的结构界说这些寄存器.标识表记标帜位的命名,同样遵循上节的外设缩写规范,以‘PPP_FLAG_’开始.对分歧的外设,标识表记标帜位都被界说在相应的文件stm32f10x_ppp.h中.用户想要进入除错(DEBUG)模式的话,必需在文件stm32f10x_conf.h中界说标签DEBUG.这样会在SRAM的外设结构部份创立一个指针.因此我们可以简化除错过程,而且通过转储外设获得来获得所有寄存器的状态.在所有情况下,SPI2都是一个指向外设SPI2首地址的指针.变量DEBUG可以仿照下例界说:#define DEBUG 1可以初始化DEBUG模式与文件stm32f10x_lib.c中如下:#ifdef DEBUGvoid debug(void){......#ifdef _SPI2SPI2 = (SPI_TypeDef *) SPI2_BASE;#endif /*_SPI2 */......} #endif /* DEBUG*/Note:1 当用户选择DEBUG模式,宏assert_param被扩展,同时运行时间检查功能也在固态函数库代码中被激活.2 进入DEBUG模式会增年夜代码的尺寸,降低代码的运行效率.因此,我们强烈建议仅仅在除错的时候使用相应代码,在最终的应用法式中,删除它们.2.固件函数库2.1压缩包描述STM32F10x固件函数库被压缩在一个zip文件中.解压该文件会发生一个文件夹:STM32F10xFWLib\FWLib,包括如下所示的子文件夹:Figure 1:固件函数库文件夹结构2.1.1文件夹Examples文件夹Examples,对应每一个STM32外设,都包括一个子文件夹.这些子文件夹包括了整套文件,组成典范的例子,来示范如何使用对应外设.这些文件有:readme.txt:每个例子的简单描述和使用说明.stm32f10x_conf.h:该头文件设置了所有使用到的外设,由分歧的“DEFINE”语句组成.stm32f10x_it.c:该源文件包括了所有的中断处置法式(如果未使用中断,则所有的函数体都为空).stm32f10x.it.h:该头文件包括了所有的中断处置法式的原形.main.c:例程代码.注:所有的例程的使用,都不受分歧软件开发环境的影响.2.1.2文件夹Library文件夹Library包括组成固件函数库核心的所有子文件夹和文件:子文件夹inc包括了固件函数库所需的头文件,用户无需修改该文件夹:stm32f10x_type.h:所有其他文件使用的通用数据类型和枚举.stm32f10x_map.h:外设存储器映像和寄存器数据结构.stm32f10x_lib.h:主头文件夹,包括了其他头文件.stm32f10x_ppp.h:每个外设对应一个头文件,包括了该外设使用的函数原形,数据结构和枚举.cortexm3_macro.h:文件cortexm3_macro.s对应的头文件.子文件夹src包括了固件函数库所需的源文件,用户无需修改该文件夹:stm32f10x_ppp.c:每个外设对应一个源文件,包括了该外设使用的函数体.stm32f10x_lib.c:初始化所有外设的指针.注:所有代码都依照Strict ANSIC标准书写,都不受分歧软件开发环境的影响.2.1.3文件夹Project文件夹Project包括了一个标准的法式项目模板,包括库文件的编译和所有用户可修改的文件,可用以建立新的工程.stm32f10x_conf.h:项目配置头文件,默认为设置了所有的外设.stm32f10x_it.c:该源文件包括了所有的中断处置法式(所有的函数体默认为空).stm32f10x_it.h:该头文件包括了所有的中断处置法式的原形.main.c:主函数体文件夹EWARM,RVMDK,RIDE:用于分歧开发环境使用,详情查询各文件夹下的文件readme.txt.2.2固件函数库文件描述Table 2列举和描述了固件函数库使用的所有文件.固件函数库的体系和文件相互包括的联系暗示在Figure 2中.每一个外设都有一个对应的源文件:stm32f10x_ppp.c和一个对应的头文件:stm32f10x_ppp.h.文件stm32f10x_ppp.c包括了使用外设PPP所需的所有固件函数.提供所有外设一个存储器映像文件stm32f10x_map.h.它包括了所有寄存器的声明,既可以用于Debug模式也可以用于release模式.头文件stm32f10x_lib.h包括了所有外设头文件的头文件.它是唯一一个用户需要包括在自己应用中的文件,起到应用和库之间界面的作用.文件stm32f10x_conf.h是唯一一个需要由用户修改的文件.它作为应用和库之间的界面,指定了一系列参数.Table 2. 固件函数库文件描述文件名描述参数设置文件,起到应用和库之间界面的作用.用户必需在运行自己的法式前修改该文件.用户可以利用模板使能或者失能外设.也可以修改外部晶振的参数.也可以是用该文件在编译前使能Debug或者release模式.主函数体示例.外设中断函数文件.用户可以加入自己的中断法式代码.对指向同一个中断向量的多个分歧中断请求,可以利用函数通过判断外设的中断标识表记标帜位来确定准确的中断源.固件函数库提供了这些函数的名称.包括了所有外设的头文件的头文件.它是唯一一个用户需要包括在自己应用中的文件,起到应用和库之间界面的作用.Debug模式初始化文件.它包括多个指针的界说,每个指针指向特定外设的首地址,以及在Debug模式被使能时,被调用的函数的界说.该文件包括了存储器映像和所有寄存器物理地址的声明,既可以用于Debug模式也可以用于release模式.所有外设都使用该文件.通用声明文件.包括所有外设驱动使用的通用类型和常数.由C语言编写的外设PPP的驱动源法式文件.外设PPP的头文件.包括外设PPP函数的界说,和这些函数使用的变量.CortexM3内核特殊指令的指令包装.Figure 2. 固件函数库文件体系结构2.3 外设的初始化和设置本节按步伐描述了如何初始化和设置任意外设.这里PPP代表任意外设.1.在主应用文件中,声明一个结构PPP_InitTypeDef,例如:PPP_InitTypeDef PPP_InitStructure;这里PPP_InitStructure是一个位于内存中的工作变量,用来初始化一个或者多个外设PPP.2.为变量PPP_InitStructure的各个结构成员填入允许的值.可以采纳以下2种方式:a)依照如下法式设置整个结构体PPP_InitStructure.member1=val1;PPP_InitStructure.member2 = val2;PPP_InitStructure.memberN = valN;/* where N is the number of the structure members */以上步伐可以合并在同一行里,用以优化代码年夜小:PPP_InitTypeDef PPP_InitStructure = { val1, val2,.., valN}b)仅设置结构体中的部份成员:这种情况下,用户应当首先调用函数PPP_SturcInit(..)来初始化变量PPP_InitStructure,然后再修改其中需要修改的成员.这样可以保证其他成员的值(多为缺省值)被正确填入.PPP_StructInit(&PPP_InitStructure);PP_InitStructure.memberX = valX;PPP_InitStructure.memberY = valY;/*where X and Y are the members the user wants to configure*/3. 调用函数PPP_Init(..)来初始化外设PPP.4. 在这一步,外设PPP已被初始化.可以调用函数PPP_Cmd(..)来使能之.PPP_Cmd(PPP, ENABLE);可以通过调用一系列函数来使用外设.每个外设都拥有各自的功能函数.更多细节参阅Section3 外设固件概述.注:1.在设置一个外设前,必需调用以下一个函数来使能它的时钟:RCC_AHBPeriphClockCmd(RCC_AHBPeriph_PPPx,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_PPPx, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_PPPx, ENABLE);2. 可以调用函数PPP_Deinit(..)来把外设PPP的所有寄存器复位为缺省值:PPP_DeInit(PPP)3.在外设设置完成以后,继续修改它的一些参数,可以参照如下步伐:PPP_InitStucture.memberX = valX;PPP_InitStructure.memberY = valY; /* where X and Y are the onlymembers that user wants to modify*/PPP_Init(PPP, &PPP_InitStructure);2.4 位段(BitBanding)Cortex™M3存储器映像包括两个位段(bitband)区.这两个位段区将别名存储器区中的每个字映射到位段存储器区的一个位,在别名存储区写入一个字具有对位段区的目标位执行读改写把持的相同效果.所有STM32F10x外设寄存器都被映射到一个位段(bitband)区.这个特性在各个函数中对单个比特进行置1/置0把持时被年夜量使用,用以减小和优化代码尺寸.Section 2.4.1和Section 2.4.2给出了外设固件函数库中如何实现位段访问的描述.2.4.1 映射公式映射公式给出了别名区中的每个字是如何对应位带区的相应位的,公式如下:bit_word_offset = (byte_offset x 32) + (bit_number × 4)bit_word_addr = bit_band_base + bit_word_offset其中:bit_word_offset是目标位在存取器位段区中的位置.bit_word_addr 是别名存储器区中字的地址,它映射到某个目标位.bit_band_base 是别名区的起始地址.byte_offset 是包括目标位的字节在位段里的序号.bit_number 是目标位所在位置(031).2.4.2 应用实例下例展现了如何把寄存器RCC_CR的PLLON[24]位,映射到别名区:/* Peripheral base address in the bitband region */#define PERIPH_BASE ((u32)0x40000000)/* Peripheral address in the alias region */#define PERIPH_BB_BASE ((u32)0x42000000)/* RCC registers bit address in the alias region */#define RCC_OFFSET (RCC_BASE PERIPH_BASE)/* CR Register *//* Alias word address of PLLON bit */#define CR_OFFSET (RCC_OFFSET + 0x00)#define PLLON_BitNumber 0x18#define CR_PLLON_BB (PERIPH_BB_BASE + (CR_OFFSET * 32 (PLLON_BitNumber * 4))编写一个使能/失能PLL的函数,步伐如下:...#define CR_PLLON_Set ((u32)0x01000000)#define CR_PLLON_Reset ((u32)0xFEFFFFFF)...void RCC_PLLCmd(FunctionalState NewState){if (NewState != DISABLE){ /* Enable PLL */RCC>CR |= CR_PLLON_Set;}else{ /* Disable PLL */RCC>CR &= CR_PLLON_Reset;}}Using bitband access this function will be coded as follows:void RCC_PLLCmd(FunctionalState NewState){*(vu32 *) CR_PLLON_BB = (u32)NewState;}2.5 运行时间检测固件函数库通过检查库函书的输入来实现运行时间毛病侦测.通过使用宏assert_param来实现运行时间检测.所有要求输入参数的函数都使用这个宏.它可以检查输入参数是否在允许的范围之内.例:函数PWR_ClearFlagstm32f10x_pwr.c:void PWR_ClearFlag(u32 PWR_FLAG){/* Check the parameters */assert_param(IS_PWR_CLEAR_FLAG(PWR_FLAG));PWR>CR |= PWR_FLAG << 2;}stm32f10x_pwr.h:/* PWR Flag */#define PWR_FLAG_WU ((u32)0x00000001)#define PWR_FLAG_SB ((u32)0x00000002)#define PWR_FLAG_PVDO ((u32)0x00000004)#define IS_PWR_CLEAR_FLAG(FLAG) ((FLAG == PWR_FLAG_WU) || (FLAG == PWR_FLAG_SB)如果传给宏assert_param的参数为false,则调用函数assert_failed并返回被毛病调用的函数所在的文件名和行数.如果传给宏assert_param的参数为true,则无返回值.宏assert_param编写于文件stm32f10x_conf.h中:/* Exported macro */#ifdef DEBUG/******************************************************************* ************ * * Macro Name : assert_param* Description : The assert_param macro is used for function's parameters check.* It is used only if the library is compiled in DEBUG mode.* Input : expr: If expr is false, it calls assert_failed function.* which reports the name of the source file and the source* line number of the call that failed.* If expr is true, it returns no value.* Return : None******************************************************************* ************/#define assert_param(expr) ((expr) ? (void)0 : assert_failed((u8 *)__FILE__,__LINE__))/* Exported functions */void assert_failed(u8* file, u32 line);#else#define assert_param(expr) ((void)0)#endif /* DEBUG */函数assert_failed编写于文件main.c或者其他用户C文件:#ifdef DEBUG/****************************************************************** * Function name : assert_failed* Description : Reports the name of the source file and the source line number.* where the assert_param error has occurred.* Input : file: pointer to the source file name* line: assert_param error line source number* Output : None* Return : None******************************************************************/ void assert_failed(u8* file, u32 line){/* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* Infinite loop */while (1){}}#endif注:运行时间检查,即宏assert_param应当只在库在Debug模式下编译时使用.建议在用户应用代码的开发和调试阶段使用运行时间检查,在最终的代码中去失落它们以改进代码尺寸和速度.如果用户仍然希望在最终的代码中保管这项功能,可以在调用库函数前,重新使用宏assert_param来测试输入参数.3. 外设固件概述本节系统描述了每一个外设固件函数库.完整地描述所有相关函数并提供如何使用他们的例子.函数的描述按如下格式进行:函数名外设函数的名称输入参数{x}输入参数描述输出参数{x}输出参数描述返回值函数的返回值4. 模拟/数字转换器4.1 ADC寄存器结构4.2 ADC库函数5. 备份寄存器(BKP)5.1 BKP寄存器结构5.2 BKP库函数6控制器局域网(CAN)6.1 CAN寄存器结构6.2 CAN库函数7 DMA控制器(DMA)7.1 DMA寄存器结构7.2 DMA库函数8 外部中断/事件控制器(EXTI)8.1 EXTI寄存器结构8.2 EXTI库函数9 FLASH存储器(FLASH)9.1 FLASH寄存器结构9.2 FLASH库函数10 通用输入/输出(GPIO)GPIO驱动可以用作多个用途,包括管脚设置,单位设置/重置,锁定机制,从端口管脚读入或者向端口管脚写入数据.Section 10.1 GPIO寄存器结构描述了固件函数库所使用的数据结构,Section 10.2 固件库函数介绍了函数库里的所有函数.10.1 GPIO寄存器结构GPIO寄存器结构,GPIO_TypeDef和AFIO_TypeDef,在文件“stm32f10x_map.h”中界说如下:typedef struct{vu32 CRL;vu32 CRH;vu32 IDR;vu32 ODR;vu32 BSRR;vu32 BRR;vu32 LCKR;} GPIO_TypeDefTypedef struct{vu32 EVCR;vu32 MAPR;vu32 EXTICR[4];} AFIO_TypeDef;Table 178.例举了GPIO所有寄存器.Table 178. GPIO寄存器IDR端口输入数据寄存器ODR端口输出数据寄存器BSRR端口位设置/复位寄存器BRR端口位复位寄存器LCKR端口配置锁定寄存器EVCR事件控制寄存器MAPR复用重映射和调试I/O配置寄存器EXTICR外部中断线路015配置寄存器五个GPIO外设声明于文件“stm32f10x_map.h”:...#define PERIPH_BASE ((u32)0x40000000)#define APB1PERIPH_BASE PERIPH_BASE#define APB2PERIPH_BASE (PERIPH_BASE + 0x10000)#define AHBPERIPH_BASE (PERIPH_BASE + 0x20000)...#define AFIO_BASE (APB2PERIPH_BASE + 0x0000)#define GPIOA_BASE (APB2PERIPH_BASE + 0x0800) #define GPIOB_BASE (APB2PERIPH_BASE + 0x0C00) #define GPIOC_BASE (APB2PERIPH_BASE + 0x1000) #define GPIOD_BASE (APB2PERIPH_BASE + 0x1400) #define GPIOE_BASE (APB2PERIPH_BASE + 0x1800) #ifndef DEBUG...#ifdef _AFIO#define AFIO ((AFIO_TypeDef *) AFIO_BASE)#endif /*_AFIO */#ifdef _GPIOA#define GPIOA ((GPIO_TypeDef *) GPIOA_BASE)#endif /*_GPIOA */#ifdef _GPIOB#define GPIOB ((GPIO_TypeDef *) GPIOB_BASE)#endif /*_GPIOB */#ifdef _GPIOC#define GPIOC ((GPIO_TypeDef *) GPIOC_BASE)#endif /*_GPIOC */#ifdef _GPIOD#define GPIOD ((GPIO_TypeDef *) GPIOD_BASE)#endif /*_GPIOD */#ifdef _GPIOE#define GPIOE ((GPIO_TypeDef *) GPIOE_BASE)#endif /*_GPIOE */...#else /* DEBUG */...#ifdef _AFIOEXT AFIO_TypeDef *AFIO;#endif /*_AFIO */#ifdef _GPIOAEXT GPIO_TypeDef *GPIOA;#endif /*_GPIOA */#ifdef _GPIOBEXT GPIO_TypeDef *GPIOB;#endif /*_GPIOB */#ifdef _GPIOCEXT GPIO_TypeDef *GPIOC;#endif /*_GPIOC */#ifdef _GPIODEXT GPIO_TypeDef *GPIOD;#endif /*_GPIOD */#ifdef _GPIOEEXT GPIO_TypeDef *GPIOE;#endif /*_GPIOE */...#endif使用Debug模式时,初始化指针AFIO, GPIOA, GPIOB, GPIOC, GPIOD 和GPIOE 于文件“stm32f10x_lib.c”:#ifdef _GPIOAGPIOA = (GPIO_TypeDef *) GPIOA_BASE;#endif /*_GPIOA */#ifdef _GPIOBGPIOB = (GPIO_TypeDef *) GPIOB_BASE;#endif /*_GPIOB */#ifdef _GPIOCGPIOC = (GPIO_TypeDef *) GPIOC_BASE;#endif /*_GPIOC */#ifdef _GPIODGPIOD = (GPIO_TypeDef *) GPIOD_BASE;#endif /*_GPIOD */#ifdef _GPIOEGPIOE = (GPIO_TypeDef *) GPIOE_BASE;#endif /*_GPIOE */#ifdef _AFIOAFIO = (AFIO_TypeDef *) AFIO_BASE;#endif /*_AFIO */为了访问GPIO寄存器,, _GPIO, _AFIO, _GPIOA, _GPIOB, _GPIOC, _GPIOD和_GPIOE必需在文件“stm32f10x_conf.h”中界说如下:#define _GPIO#define _GPIOA#define _GPIOB#define _GPIOC#define _GPIOD#define _GPIOE#define _AFIO10.2 GPIO库函数Table 179. 例举了GPIO的库函数Table 179. GPIO库函数GPIO_Init根据GPIO_InitStruct中指定的参数初始化外设GPIOx寄存器GPIO_ReadInputData读取指定的GPIO端口输入GPIO_ReadOutputDataBit读取指定端口管脚的输出GPIO_ReadOutputData读取指定的GPIO端口输出GPIO_SetBits设置指定的数据端口位GPIO_ResetBits清除指定的数据端口位GPIO_WriteBit设置或者清除指定的数据端口位GPIO_Write向指定GPIO数据端口写入数据GPIO_PinLockConfig锁定GPIO管脚设置寄存器GPIO_EventOutputConfig选择GPIO管脚用作事件输出GPIO_EventOutputCmd使能或者失能事件输出10.2.1 函数GPIO_DeInitTable 180. 描述了函数GPIO_DeInit函数名GPIO_DeInit输入参数GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输出参数无返回值无例:/* Resets the GPIOA peripheral registers to their default resetvalues */GPIO_DeInit(GPIOA);10.2.2 函数GPIO_AFIODeInitTable 181. 描述了函数GPIO_AFIODeInitTable 181. 函数GPIO_AFIODeInit函数名GPIO_AFIODeInit输入参数无输出参数无返回值无先决条件无例:/* Resets the Alternate functions registers to their default resetvalues */GPIO_AFIODeInit();10.2.3 函数GPIO_InitTable 182. 描述了函数GPIO_InitTable 182. 函数GPIO_InitGPIO_Init输入参数1GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输入参数2GPIO_InitStruct:指向结构GPIO_InitTypeDef的指针,包括了外设GPIO的配置信息参阅Section:GPIO_InitTypeDef查阅更多该参数允许取值范围输出参数无返回值无先决条件无被调用函数无GPIO_InitTypeDef structureGPIO_InitTypeDef界说于文件“stm32f10x_gpio.h”:typedef struct{u16 GPIO_Pin;GPIOSpeed_TypeDef GPIO_Speed;GPIOMode_TypeDef GPIO_Mode;} GPIO_InitTypeDefGPIO_Pin该参数选择待设置的GPIO管脚,使用把持符“|”可以一次选中多个管脚.可以使用下表中的任意组合.Table 183. GPIO_Pin值GPIO_Pin_1选中管脚1GPIO_Pin_2选中管脚2GPIO_Pin_3选中管脚3GPIO_Pin_4选中管脚4GPIO_Pin_5选中管脚5GPIO_Pin_6选中管脚6GPIO_Pin_7选中管脚7GPIO_Pin_8选中管脚8GPIO_Pin_9选中管脚9GPIO_Pin_10选中管脚10GPIO_Pin_11选中管脚11GPIO_Pin_12选中管脚12GPIO_Pin_15选中管脚15GPIO_Pin_All选中全部管脚GPIO_SpeedGPIO_Speed GPIO_Speed用以设置选中管脚的速率.Table 184. 给出了该参数可取的值.Table 184. GPIO_Speed值GPIO_SpeedGPIO_Mode用以设置选中管脚的工作状态.Table 185. 给出了该参数可取的值. Table 185. GPIO_Mode值GPIO_Mode_IPD下拉输入GPIO_Mode_IPU上拉输入GPIO_Mode_Out_OD开漏输出GPIO_Mode_Out_PP推挽输出GPIO_Mode_AF_OD复用开漏输出GPIO_Mode_AF_PP复用推挽输出注意:⏹当某管脚设置为上拉或者下拉输入模式,使用寄存器Px_BSRR和PxBRR ⏹GPIO_Mode允许同时设置GPIO方向(输入/输出)和对应的输入/输出设置,:位[7:4]对应GPIO方向,位[4:0]对应配置.GPIO方向有如下索引GPIO输入模式= 0x00GPIO输出模式= 0x01Table 186. 给出了所有GPIO_Mode的索引和编码Table 186. GPIO_Mode的索引和编码GPIO方向索引模式设置模式代码GPIO Input0x00 GPIO_Mode_AIN 0x00 0x00GPIO_Mode_IN_FLOATING 0x04 0x04GPIO_Mode_IPD 0x08 0x28GPIO_Mode_IPU 0x08 0x48GPIO Output0x01 GPIO_Mode_Out_OD 0x04 0x14GPIO_Mode_Out_PP 0x00 0x10GPIO_Mode_AF_OD 0x0C 0x1CGPIO_Mode_AF_PP 0x08 0x18例:/* Configure all the GPIOA in Input Floating mode */GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStructure);10.2.4 函数GPIO_StructInitTable 187. 描述了函数GPIO_StructInitTable 187. 函数GPIO_StructInit函数名GPIO_StructInit输入参数GPIO_InitStruct:指向结构GPIO_InitTypeDef的指针,待初始化输出参数无返回值无先决条件无Table 188. 给出了GPIO_InitStruct各个成员的缺省值Table 188. GPIO_InitStruct缺省值成员缺省值例:/* Initialize the GPIO Init Structure parameters */GPIO_InitTypeDef GPIO_InitStructure;GPIO_StructInit(&GPIO_InitStructure);10.2.5 函数GPIO_ReadInputDataBitTable 189. 描述了函数GPIO_ReadInputDataBitTable 189. 函数GPIO_ReadInputDataBit函数名GPIO_ReadInputDataBit输入参数1GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输入参数2GPIO_Pin:待读取的端口位参阅Section:GPIO_Pin查阅更多该参数允许取值范围先决条件无被调用函数无例:/* Reads the seventh pin of the GPIOB and store it in ReadValue variable */u8 ReadValue;ReadValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_7);10.2.6 函数GPIO_ReadInputDataTable 190. 描述了函数GPIO_ReadInputDataTable 190. 函数GPIO_ReadInputData函数名GPIO_ReadInputData输入参数GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输出参数无返回值GPIO输入数据端口值先决条件无例:/*Read the GPIOC input data port and store it in ReadValuevariable*/u16 ReadValue;ReadValue = GPIO_ReadInputData(GPIOC);10.2.7 函数GPIO_ReadOutputDataBitTable 191. 描述了GPIO_ReadOutputDataBitTable 191. 函数GPIO_ReadOutputDataBit函数名GPIO_ReadOutputDataBit输入参数1GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输入参数2GPIO_Pin:待读取的端口位参阅Section:GPIO_Pin查阅更多该参数允许取值范围返回值输出端口管脚值先决条件无被调用函数无例:/* Reads the seventh pin of the GPIOB and store it in ReadValue variable */u8 ReadValue;ReadValue = GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_7);10.2.8 函数GPIO_ReadOutputDataTable 192. 描述了函数GPIO_ReadOutputDataTable 192. 函数GPIO_ReadOutputData函数名GPIO_ReadOutputData输入参数GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输出参数无返回值GPIO输出数据端口值先决条件无例:/* Read the GPIOC output data port and store it in ReadValue variable */u16 ReadValue;ReadValue = GPIO_ReadOutputData(GPIOC);10.2.9 函数GPIO_SetBitsTable 193. 描述了GPIO_SetBitsTable 193. 函数GPIO_SetBits函数名GPIO_SetBits输入参数1GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输入参数2GPIO_Pin:待设置的端口位该参数可以取GPIO_Pin_x(x可以是015)的任意组合参阅Section:GPIO_Pin查阅更多该参数允许取值范围返回值无先决条件无被调用函数无例:/* Set the GPIOA port pin 10 and pin 15 */GPIO_SetBits(GPIOA, GPIO_Pin_10 | GPIO_Pin_15);10.2.10 函数GPIO_ResetBitsTable 194. 描述了GPIO_ResetBitsTable 194. 函数GPIO_ResetBits函数名GPIO_ResetBits输入参数1GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输入参数2GPIO_Pin:待清除的端口位该参数可以取GPIO_Pin_x(x可以是015)的任意组合参阅Section:GPIO_Pin查阅更多该参数允许取值范围输出参数无返回值无先决条件无被调用函数无例:/* Clears the GPIOA port pin 10 and pin 15 */GPIO_ResetBits(GPIOA, GPIO_Pin_10 | GPIO_Pin_15);10.2.11 函数GPIO_WriteBitTable 195. 描述了GPIO_WriteBitTable 195. 函数GPIO_WriteBit函数名GPIO_WriteBit输入参数1GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输入参数2GPIO_Pin:待设置或者清除指的端口位该参数可以取GPIO_Pin_x(x可以是015)的任意组合参阅Section:GPIO_Pin查阅更多该参数允许取值范围输入参数3BitVal: 该参数指定了待写入的值该参数必需取枚举BitAction的其中一个值Bit_RESET: 清除数据端口位Bit_SET: 设置数据端口位输出参数无返回值无先决条件无/* Set the GPIOA port pin 15 */GPIO_WriteBit(GPIOA, GPIO_Pin_15, Bit_SET);10.2.12 函数GPIO_WriteTable 196. 描述了GPIO_WriteTable 196. 函数GPIO_Write函数名GPIO_Write输入参数1GPIOx:x可以是A,B,C,D或者E,来选择GPIO外设输入参数2PortVal: 待写入端口数据寄存器的值输出参数无返回值无先决条件无被调用函数无例:/* Write data to GPIOA data port */GPIO_Write(GPIOA, 0x1101);10.2.13 函数GPIO_PinLockConfigTable 197. 描述了GPIO_PinLockConfigTable 197. 函数GPIO_PinLockConfig函数名GPIO_PinLockConfig输入参数2GPIO_Pin:待锁定的端口位该参数可以取GPIO_Pin_x(x可以是015)的任意组合参阅Section:GPIO_Pin查阅更多该参数允许取值范围输出参数无返回值无先决条件无被调用函数无例:/* Lock GPIOA Pin0 and Pin1 */GPIO_PinLockConfig(GPIOA, GPIO_Pin_0 | GPIO_Pin_1);10.2.14 函数GPIO_EventOutputConfigTable 198. 描述了GPIO_EventOutputConfigTable 198. 函数GPIO_EventOutputConfig函数名GPIO_EventOutputConfig输入参数1GPIO_PortSource: 选择用作事件输出的GPIO端口参阅Section:GPIO_PortSource查阅更多该参数允许取值范围输入参数2GPIO_PinSource:事件输出的管脚该参数可以取GPIO_PinSourcex(x可以是015)输出参数无返回值无先决条件无被调用函数无GPIO_PortSourceGPIO_PortSource用以选择用作事件输出的GPIO端口.Table 199. 给出了该参数可取的值Table 199. GPIO_PortSource值GPIO_PortSource描述GPIO_PortSourceGPIOC选择GPIOCGPIO_PortSourceGPIOD选择GPIOD/* Selects the GPIOE pin 5 for EVENT output */GPIO_EventOutputConfig(GPIO_PortSourceGPIOE, GPIO_PinSource5);10.2.15 函数GPIO_EventOutputCmdTable 200. 描述了GPIO_EventOutputCmdTable 200. 函数GPIO_EventOutputCmd函数名GPIO_EventOutputCmd输入参数1NewState: 事件输出的新状态这个参数可以取:ENABLE或者DISABLE输出参数无返回值无先决条件无例:/* Enable Event Ouput to the GPIOC pin 6 */GPIO_EventOutputConfig(GPIO_PortSourceGPIOC, GPIO_PinSource6);GPIO_EventOutputCmd(ENABLE);10.2.16 函数GPIO_PinRemapConfigTable 201. 描述了GPIO_ PinRemapConfigTable 201. 函数GPIO_ PinRemapConfig函数名GPIO_ PinRemapConfig函数原形void GPIO_PinRemapConfig(u32 GPIO_Remap, FunctionalStateNewState)功能描述改变指定管脚的映射输入参数1GPIO_Remap: 选择重映射的管脚参阅Section:GPIO_Remap查阅更多该参数允许取值范围输入参数2NewState: 管脚重映射的新状态这个参数可以取:ENABLE或者DISABLE输出参数无返回值无先决条件无被调用函数无GPIO_RemapGPIO_Remap用以选择用作事件输出的GPIO端口.Table 202. 给出了该参数可取的值Table 202. GPIO_Remap值GPIO_Remap描述GPIO_Remap_USART1USART1复用功能映射GPIO_PartialRemap_USART3USART2复用功能映射GPIO_FullRemap_USART3USART3复用功能完全映射GPIO_PartialRemap_TIM1USART3复用功能部份映射GPIO_FullRemap_TIM1TIM1复用功能完全映射GPIO_PartialRemap1_TIM2TIM2复用功能部份映射1GPIO_PartialRemap2_TIM2TIM2复用功能部份映射2GPIO_FullRemap_TIM2TIM2复用功能完全映射GPIO_PartialRemap_TIM3TIM3复用功能部份映射GPIO_FullRemap_TIM3TIM3复用功能完全映射GPIO_Remap_TIM4TIM4复用功能映射GPIO_Remap1_CAN CAN复用功能映射1GPIO_Remap2_CAN CAN复用功能映射2GPIO_Remap_PD01PD01复用功能映射GPIO_Remap_SWJ_NoJTRST除JTRST外SWJ完全使能(JTAG+SWDP)GPIO_Remap_SWJ_JTAGDisable JTAGDP失能 + SWDP使能例:/* I2C1_SCL on PB.08, I2C1_SDA on PB.09 */GPIO_PinRemapConfig(GPIO_Remap_I2C1, ENABLE);10.2.17 函数GPIO_EXTILineConfigTable 203. 描述了GPIO_EXTILineConfigTable 203. 函数GPIO_EXTILineConfig函数名GPIO_EXTILineConfig输入参数1GPIO_PortSource: 选择用作外部中断线源的GPIO端口参阅Section:GPIO_PortSource查阅更多该参数允许取值范围输入参数2GPIO_PinSource:待设置的外部中断线路该参数可以取GPIO_PinSourcex(x可以是015)输出参数无返回值无先决条件无被调用函数无例:/* Selects PB.08 as EXTI Line 8 */。
stm32新手必看 文档
STM32学前班教程之一:为什么是它经过几天的学习,基本掌握了STM32的调试环境和一些基本知识。
想拿出来与大家共享,笨教程本着最大限度简化删减STM32入门的过程的思想,会把我的整个入门前的工作推荐给大家。
就算是给网上的众多教程、笔记的一种补充吧,所以叫学前班教程。
其中涉及产品一律隐去来源和品牌,以防广告之嫌。
全部汉字内容为个人笔记。
所有相关参考资料也全部列出。
:lol教程会分几篇,因为太长啦。
今天先来说说为什么是它——我选择STM32的原因。
我对未来的规划是以功能性为主的,在功能和面积之间做以平衡是我的首要选择,而把运算放在第二位,这根我的专业有关系。
里面的运算其实并不复杂,在入门阶段想尽量减少所接触的东西。
不过说实话,对DSP的外设并和开发环境不满意,这是为什么STM32一出就转向的原因。
下面是我自己做过的两块DSP28的全功能最小系统板,在做这两块板子的过程中发现要想尽力缩小DSP的面积实在不容易(目前只能达到50mm×45mm,这还是没有其他器件的情况下),尤其是双电源的供电方式和1.9V的电源让人很头疼。
后来因为一个项目,接触了LPC2148并做了一块板子,发现小型的ARM7在外设够用的情况下其实很不错,于是开始搜集相关芯片资料,也同时对小面积的AVR和51都进行了大致的比较,这个时候发现了CortexM3的STM32,比2148拥有更丰富和灵活的外设,性能几乎是2148两倍(按照MIPS值计算)。
正好2148我还没上手,就直接转了这款STM32F103。
与2811相比较(核心 1.8V供电情况下),135MHz×1MIPS。
现在用STM32F103,72MHz×1.25MIPS,性能是DSP的66%,STM32F103R型(64管脚)芯片面积只有2811的51%,STM32F103C型(48管脚)面积是2811的25%,最大功耗是DSP的20%,单片价格是DSP的30%。
STM32初学者教程

STM32初学者教程STM32是意法半导体(STMicroelectronics)推出的一款32位微控制器系列。
它具有强大的处理能力、丰富的外设和灵活的可编程性,广泛应用于各种领域,如工业控制、汽车电子、物联网设备等。
对于初学者来说,掌握STM32的基础知识和编程技巧是非常重要的。
下面是一份适用于STM32初学者的教程,帮助你快速上手STM32开发。
第一步:了解STM32系列首先,你需要了解STM32系列的基本信息。
该系列微控制器以其精简的体积和低功耗而闻名,有多个型号可供选择。
每个型号都具有不同的处理能力和外设集成。
你可以根据项目需求选择适合的型号。
第二步:搭建开发环境要开始使用STM32,你需要搭建一个适合的开发环境。
首先,你需要一台计算机,并安装STM32开发工具。
STMicroelectronics提供了免费的开发工具STM32CubeIDE,它集成了多个开发工具,如编译器、调试器等。
同时,你还需要购买一块开发板,比如ST官方提供的Discovery系列开发板。
将开发板连接到计算机上,确保能够识别到设备。
第三步:学习基本操作第四步:学习开发工具的使用学习如何使用STM32开发工具是非常重要的。
你需要掌握编译、调试、烧录等操作。
STM32CubeIDE提供了一套强大的调试工具,如单步调试、断点调试等。
你可以利用这些工具来调试你的代码,查找错误。
此外,你还需要学会如何使用外设库函数,这些函数可以简化你的开发过程。
第五步:学习编程技巧掌握编程技巧对于STM32开发来说也是非常重要的。
你可以学习如何使用中断、定时器等功能来优化你的代码。
此外,你还可以学习如何使用DMA来提高数据传输效率。
通过学习这些编程技巧,你可以更好地利用STM32的功能。
第六步:参考文档和教程在学习STM32的过程中,你可以参考一些官方文档和教程。
STMicroelectronics提供了丰富的文档和教程,包括编程手册、应用笔记等。
STM32入门教程
STM32⼊门教程前⾔⼀天⼊门STM32,仅⼀天的时间,是否有真的这么快。
不同的⼈对⼊门的理解不⼀样,这篇⼀天⼊门STM32的教程,我们先对⼊门达成⼀个共识,如果你有异议,⼀天⼊门不了,请不要较真,不要骂街,保持⼀个⼯程师该有的修养,默默潜⼼学习,因为你还有很⼤的上升空间。
我眼中的⼊门:(前提是你学过51单⽚机和C语⾔)1、知道参考官⽅的什么资料来学习,⽽不是陷⼊⼀⼤堆资料中⽆从下⼿。
2、知道如何参考官⽅的⼿册和官⽅的代码来独⽴写⾃⼰的程序,⽽不是⼀味的看到⼈家写的代码就觉得⼈家很⽜逼。
3、消除对STM32的恐惧,消除对库开发的恐惧,学习是⼀个快乐⽽富有成就感的过程。
第1章⼀天⼊门STM32本章参考资料:《STM32中⽂参考⼿册》《CM3权威指南CnR2》学习本章时,配合《STM32中⽂参考⼿册》GPIO章节⼀起阅读,效果会更佳,特别是涉及到寄存器说明的部分。
1.151与STM32简介51是嵌⼊式学习中⼀款⼊门级的精典MCU,因其结构简单,易于教学,且可以通过串⼝编程⽽不需要额外的仿真器,所以在教学时被⼤量采⽤,⾄今很多⼤学在嵌⼊式教学中⽤的还是51。
51诞⽣于70年代,属于传统的8位单⽚机,如今,久经岁⽉的洗礼,既有其辉煌⼜有其不⾜。
现在的市场产品竞争激烈,对成本极其敏感,相应地对MCU的要求也更苛刻:功能更多,功耗更低,易⽤界⾯和多任务。
⾯对这些要求,51现有的资源就显得得抓襟见肘了。
所以⽆论是⾼校教学还是市场需求,都急需⼀款新的MCU来为这个领域注⼊新的活⼒。
基于这市场的需求,ARM公司推出了其全新的基于ARMv7架构的32位Cortex-M3微控制器内核。
紧随其后,ST(意法半导体)公司就推出了基于Cortex-M3内核的MCU—STM32。
STM32凭借其产品线的多样化、极⾼的性价⽐、简单易⽤的库开发⽅式,迅速在众多Cortex-M3MCU中脱颖⽽出,成为最闪亮的⼀颗新星。
STM32⼀上市就迅速占领了中低端MCU市场,受到了市场和⼯程师的⽆⽐青睐,颇有星⽕燎原之势。
STM32_参考手册-中文
23 串行外设接口(SPI)小容量产品是指闪存存储器容量在16K至32K字节之间的STM32F101xx STM32F102xx和STM32F103xx微控制器。
中容量产品是指闪存存储器容量在64K至128K字节之间的STM32F101xx、STM32F102xx和STM32F103xx微控制器。
大容量产品是指闪存存储器容量在256K至512K字节之间的STM32F101xx和STM32F103xx微控制器。
互联型产品是指STM32F105xx和STM32F107xx微控制器。
除非特别说明,本章描述的模块适用于整个STM32F10xxx微控制器系列。
SPI简介在大容量产品和互联型产品上,SPI接口可以配置为支持SPI协议或者支持I2S音频协议。
SPI接口默认工作在SPI方式,可以通过软件把功能从SPI模式切换到I2S模式。
在小容量和中容量产品上,不支持I2S音频协议。
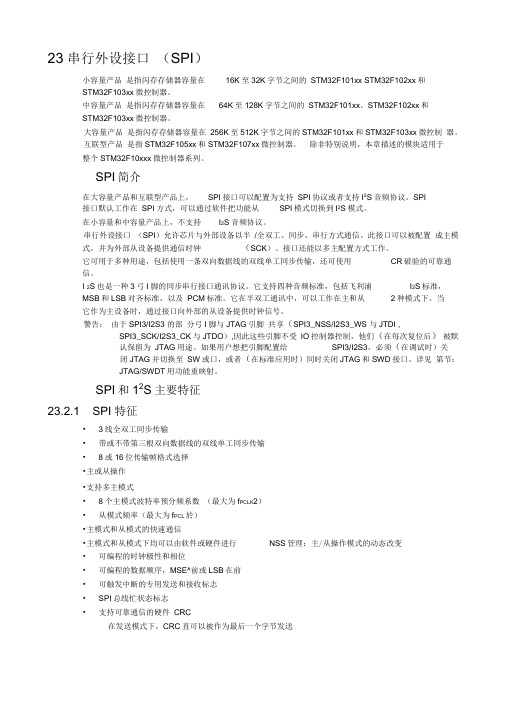
串行外设接口(SPI)允许芯片与外部设备以半/全双工、同步、串行方式通信。
此接口可以被配置成主模式,并为外部从设备提供通信时钟(SCK)。
接口还能以多主配置方式工作。
它可用于多种用途,包括使用一条双向数据线的双线单工同步传输,还可使用CR破验的可靠通信。
I 2S也是一种3弓I脚的同步串行接口通讯协议。
它支持四种音频标准,包括飞利浦I2S标准,MSB和LSB对齐标准,以及PCM标准。
它在半双工通讯中,可以工作在主和从2种模式下。
当它作为主设备时,通过接口向外部的从设备提供时钟信号。
警告:由于SPI3/I2S3 的部分弓I脚与JTAG引脚共享(SPI3_NSS/I2S3_WS 与JTDI ,SPI3_SCK/I2S3_CK与JTDO),因此这些引脚不受IO控制器控制,他们(在每次复位后)被默认保留为JTAG用途。
如果用户想把引脚配置给SPI3/I2S3,必须(在调试时)关闭JTAG并切换至SW或口,或者(在标准应用时)同时关闭JTAG和SWD接口。
STM32入门

STM32入门第一章 STM32简介STM32系列32位闪存微控制器基于突破性的ARM Cortex™-M3内核,这是一款专为嵌入式应用而开发的内核。
STM32系列产品得益于Cortex-M3在架构上进行的多项改进,包括提升性能的同时又提高了代码密度的Thumb-2指令集,大幅度提高的中断响应,而且所有新功能都同时具有业界最优的功耗水平。
STM32系列产品的目的是为MCU用户提供新的自由度。
它提供了一个完整的32位产品系列,在结合了高性能、低功耗和低电压特性的同时保持了高度的集成性能和简易的开发特性。
现有四条产品线,如图所示,我们现在选择的是STM32F103,性价比相当高,也是目前市场上用量最大的STM32系列。
STM32的高性能得益于ARM的Cortex-M3内核,CM3作为ARM7的后继者,大刀阔斧地改革了设计架构。
从而显著地简化了编程和调试的复杂度,处理能力也更加强大。
除此之外,CM3还突破性地引入了很多时尚的甚至崭新的技术,专门满足单片机应用程序的需求。
比如,服务于“使命-关键”应用的不可屏蔽中断,极度敏捷并且拥有确定性的嵌套向量中断系统,原子性质的位操作,还有一个可选的内存保护单元。
Cortex-M3是一个 32位处理器内核。
内部的数据路径是 32位的,寄存器是 32位的,存储器接口也是 32 位的。
CM3 采用了哈佛结构,拥有独立的指令总线和数据总线,可以让取指与数据访问并行不悖。
这样一来数据访问不再占用指令总线,从而提升了性能。
为实现这个特性, CM3内部含有好几条总线接口,每条都为自己的应用场合优化过,并且它们可以并行工作。
但是另一方面,指令总线和数据总线共享同一个存储器空间(一个统一的存储器系统)。
换句话说,不是因为有两条总线,可寻址空间就变成 8GB了。
比较复杂的应用可能需要更多的存储系统功能,为此CM3提供一个可选的MPU,而且在需要的情况下也可以使用外部的 cache。
STM32入门系列-学习STM32要掌握的内容
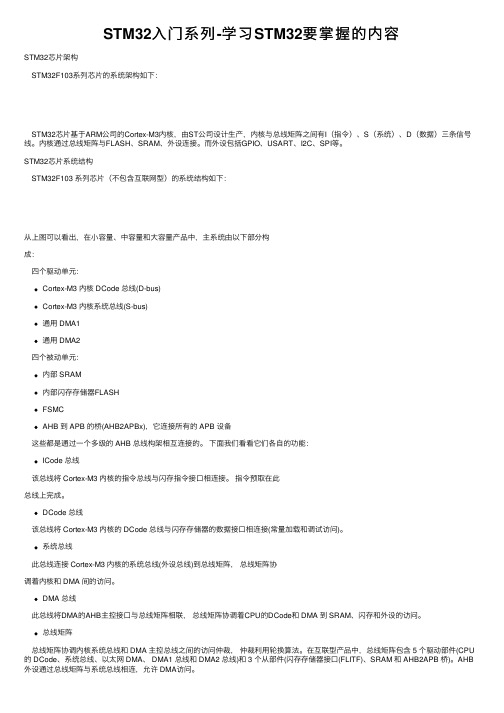
STM32⼊门系列-学习STM32要掌握的内容STM32芯⽚架构STM32F103系列芯⽚的系统架构如下:STM32芯⽚基于ARM公司的Cortex-M3内核,由ST公司设计⽣产,内核与总线矩阵之间有I(指令)、S(系统)、D(数据)三条信号线。
内核通过总线矩阵与FLASH、SRAM、外设连接。
⽽外设包括GPIO、USART、I2C、SPI等。
STM32芯⽚系统结构STM32F103 系列芯⽚(不包含互联⽹型)的系统结构如下:从上图可以看出,在⼩容量、中容量和⼤容量产品中,主系统由以下部分构成:四个驱动单元:Cortex-M3 内核 DCode 总线(D-bus)Cortex-M3 内核系统总线(S-bus)通⽤ DMA1通⽤ DMA2四个被动单元:内部 SRAM内部闪存存储器FLASHFSMCAHB 到 APB 的桥(AHB2APBx),它连接所有的 APB 设备这些都是通过⼀个多级的 AHB 总线构架相互连接的。
下⾯我们看看它们各⾃的功能:ICode 总线该总线将 Cortex-M3 内核的指令总线与闪存指令接⼝相连接。
指令预取在此总线上完成。
DCode 总线该总线将 Cortex-M3 内核的 DCode 总线与闪存存储器的数据接⼝相连接(常量加载和调试访问)。
系统总线此总线连接 Cortex-M3 内核的系统总线(外设总线)到总线矩阵,总线矩阵协调着内核和 DMA 间的访问。
DMA 总线此总线将DMA的AHB主控接⼝与总线矩阵相联,总线矩阵协调着CPU的DCode和 DMA 到 SRAM、闪存和外设的访问。
总线矩阵总线矩阵协调内核系统总线和 DMA 主控总线之间的访问仲裁,仲裁利⽤轮换算法。
在互联型产品中,总线矩阵包含 5 个驱动部件(CPU 的 DCode、系统总线、以太⽹ DMA、 DMA1 总线和 DMA2 总线)和 3 个从部件(闪存存储器接⼝(FLITF)、SRAM 和 AHB2APB 桥)。
STM32F3xx 硬件开发入门_中文资料

4.2 SWJ 调试端口 (串行接口和 JTAG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3 引脚排列和调试端口引脚 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
在第 6 章节中对差别进行了汇总。
本文还包含了详细的参考设计原理图,说明了主要元件、接口和模式。
在本文其余部分 (除非特别说明), STM32F3xx 一词指下面表 1 中的部件编号。
类型 微控制器
表 1. 适用产品
STM32F301x6/x8 STM32F302x6/x8 STM32F302xB/xC STM32F303x6/x8 STM32F303xB/xC STM32F318xx STM32F328xx STM32F358xx STM32F37xxx
6
STM32F3x8 与 STM32F30x/F37x 对比 . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7
参考设计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.1.6 引脚排列和引脚说明 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.2 元件参考 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
STM32硬件开发指南_V1.8

STM32硬件设计入门STM32系列微控制器王志杰2014-6-8目录1简介 (2)1.1STM32产品线 (2)1.2ARM Cortex-M4产品系列 (2)1.3ARM Cortex-M3产品系列 (3)1.4ARM Cortex-M0产品系列 (3)1.5ARM Cortex-M0+产品系列 (4)2注意事项 (4)2.1电源 (4)2.1.1内核电源区域 (4)2.1.2主电源区域 (5)2.1.3ADC电源区域 (6)2.1.4备份电源区域 (6)2.2调试 (7)2.3STM32的I2C接口 (7)2.4Boot Loader (7)3抗干扰设计 (8)3.1未使用的GPIO端口的处理 (8)3.2STM32与大电流器件地线的布局 (8)3.3数字地与模拟地 (9)3.4过孔 (9)4应用笔记 (10)1简介1.1 STM32产品线1.2 ARM Cortex-M4产品系列1.4 ARM Cortex-M0产品系列2注意事项半导体工艺制程的进步,使得内部线宽原来越细,芯片工作电压也越来越低。
这对于工程师硬件设计来说,提出了更高的要求。
2.1 电源为STM32工作提供一个干净的稳定的可靠的电源在硬件设计中是非常重要的。
保证STM32系列微控制器的供电电压都是其允许的电压范围之内,以确保STM32的正常工作和设备的安全可靠地运行。
STM32系列的电源结构基本都有:内核电源区域、主电源区域、ADC电源区域和备份区域。
每个部分对供电的要求也有所不同。
2.1.1内核电源区域STM32的内核电源区主要为内核等一些数字电路提供电源,而且STM32系列内部都嵌入了一个电压调节器给内核提供一个稳定的电源电压。
⏹STM32F0系列,Cortex-M0,内核电压是1.8V⏹STM32F1/F2系列,Cortex-M3,内核电压是1.8V⏹STM32F4系列,Cotex-M4,内核电压是1.2V由于工艺等原因,一些TM32系列的内核电源要求使用一个外部的内核电源滤波电容,在ST的资料中标识为VCAP电容。
STM32入门基本知识
STM32入门基本知识预览说明:预览图片所展示的格式为文档的源格式展示,下载源文件没有水印,内容可编辑和复制STM32学前班教程之一:选择他的理由经过几天的学习,基本掌握了STM32的调试环境和一些基本知识。
想拿出来与大家共享,笨教程本着最大限度简化删减STM32入门的过程的思想,会把我的整个入门前的工作推荐给大家。
就算是给网上的众多教程、笔记的一种补充吧,所以叫学前班教程。
其中涉及产品一律隐去来源和品牌,以防广告之嫌。
全部汉字内容为个人笔记。
所有相关参考资料也全部列出。
:lol教程会分几篇,因为太长啦。
今天先来说说为什么是它——我选择STM32的原因。
我对未来的规划是以功能性为主的,在功能和面积之间做以平衡是我的首要选择,而把运算放在第二位,这根我的专业有关系。
里面的运算其实并不复杂,在入门阶段想尽量减少所接触的东西。
不过说实话,对DSP的外设并和开发环境不满意,这是为什么STM32一出就转向的原因。
下面是我自己做过的两块DSP28的全功能最小系统板,在做这两块板子的过程中发现要想尽力缩小DSP的面积实在不容易(目前只能达到50mm×45mm,这还是没有其他器件的情况下),尤其是双电源的供电方式和的电源让人很头疼。
后来因为一个项目,接触了LPC2148并做了一块板子,发现小型的ARM7在外设够用的情况下其实很不错,于是开始搜集相关芯片资料,也同时对小面积的AVR和51都进行了大致的比较,这个时候发现了CortexM3的STM32,比2148拥有更丰富和灵活的外设,性能几乎是2148两倍(按照MIPS值计算)。
正好2148我还没上手,就直接转了这款STM32F103。
与2811相比较(核心供电情况下),135MHz×1MIPS。
现在用STM32F103,72MHz×,性能是DSP的66%,STM32F103R型(64管脚)芯片面积只有2811的51%,STM32F103C型(48管脚)面积是2811的25%,最大功耗是DSP的20%,单片价格是DSP的30%。
【设计教程大集合】STM32F3XX大全

STM32F3系列是意法半导体ARM® Cortex®-M4微控制器产品组合的入门级产品。
经过市场检验的M4处理器内核可支持DSP指令,内置浮点单元(FPU),运行频率高达72MHz,若再搭配意法半导体独有的且基于内核耦合存储器(CCM-SRAM) 的程序加速(Routine Booster) 功能,其电机控制等例行程序的执行速度可比原来提升43%。
STM32F3系列属于共有600余款产品的STM32产品家族,性能表现比STM32F1 Cortex-M3系列更加出色。
STM32系列产品的软硬件具有广泛的共性,并提供简单易用的设计工具和开发生态系统。
基本资料【产品新闻】意法半导体(ST)推出闪存容量高达512KB的STM32F3微控制器,大幅提升系统集成度【数据手册】STM32F358xC、STM32F378xx、STM32F318、STM32F302、STM32F303等ARM Cortex-M4 32位内核【硬件资源】STM32F3系列固件、软件、工具资源【视频】意法半导体STM32F3系列探索套件(discovery kit)介绍进阶设计目前意法半导体针对智慧型手机Sensor Hub提供采用Cortex-M0核心开发的STM32F072、采用Cortex-M4核心开发的STM32F301和STM32F401,以及采用Cortex-M4核心开发的STM32F429,其中三星(Samsung)智慧型手机Note 3的Sensor Hub中,即搭载该公司STM32F401。
【STM32F303开发】+视觉姿态识别对一个目标进行姿态识别,以简单的三角形为例,目标放置在一个旋转平台上,初始姿态位置,通过图像识别姿态,并将姿态数据传送给nucleo,nucleo驱动舵机进行角度调整。
【STM32F303开发】+自动智能栏杆机控制器的设计电动栏杆机选用低速无刷电机直接拖动拦杆机构,控制器采用STM32作为主控制器,并由STM32内部PWM模块产生PWM波形驱动智能功率模块(IPM)中的功率器件的导通与关断来驱动无刷电机的运转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
调试管理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1 简介 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.5 时钟安全系统 (CSS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3
自举配置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.1 电源方案 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.1.1 独立模拟电源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
6
STM32F3x8 与 STM32F30x/F37x 对比 . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7
参考设计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.2.1 复位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2.2 上电复位 (POR)/ 掉电复位 (PDR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.1.2 Sigma Delta 供电电压 (仅 F37x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.1.3 电池备份 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
7.1.4 SWJ 接口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.1.5 电源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.1 SWJ 调试端口引脚 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3.2 灵活的 SWJ-DP 引脚分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 SWJ 调试端口 (串行接口和 JTAG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.3 引脚排列和调试端口引脚 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
部件编号
2014 年 4 月
DocID023944 Rev 3
1/31
目录
目录
AN4206
1
电源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 HSI 时钟 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 LSI 时钟 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.1 高速外部时钟信号 (HSE) OSC 时钟 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 LSE 时钟 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
在第 6 章节中对差别进行了汇总。
本文还包含了详细的参考设计原理图,说明了主要元件、接口和模式。
在本文其余部分 (除非特别说明), STM32F3xx 一词指下面表 1 中的部件编号。
类型 微控制器
表 1. 适用产品
STM32F301x6/x8 STM32F302x6/x8 STM32F302xB/xC STM32F303x6/x8 STM32F303xB/xC STM32F318xx STM32F328xx STM32F358xx STM32F37xxx
8
修订历史 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
DocID023944 Rev 3
3/31
1.1.4 电压调压器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 复位和供电监控器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
4.3.3 JTAG 引脚上的内部上拉和下拉 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3.4 使用标准 JTAG 连接器的 SWJ 调试端口连接 . . . . . . . . . . . . . . . . . . . . . 21
1.2.3 可编程电压检测器 (PVD) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2
时钟 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
7.1 描述 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.1.1 时钟 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5
建议 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.1 印刷电路板 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7.1.2 复位 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.1.3 自举模式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.2 元件位置 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.3 接地和供电 (VSS、 VDD、 VSSA、 VDDA、 VSSSD、 VDDSD) . . . . . . . . 22