GIS学习笔记地图投影与GPS参数计算
如何用MAPGIS67软件将工作(GPS)坐标点投影到图上

首先建立一个坐标.txt 文本文档
一、生成点文件
QQ 593223044
1 先将坐标值输入到文本文档里,去掉序号、带号,如图:
2 进入 mapgis 投影变换子菜单 打开 MAPGIS 软件,移动光标到实用服务,点击投影变换系统。
5 根据具体的坐标值,及相应投影信息设置投影参数,“用户投影参数”和 “结果投影参数”一样。需要设置的信息如图中红框区域。本例中采用北京 54 坐标,3 度带,23 度带。
QQ 593223044
6 设置 “结果投影参数”
7 设置点图元参数,包括点的符号表示,大小等信息。
QQ 593223044
8 最后点击“投影变换”,再点“确定”。复位显示即可看到生成点文件。如 图:
甘肃省核地质212大队物探队笔记mapgis软件应用如何将gps坐标点投影到mapgis图上qq5932230442014623qq593223044如何将gps坐标点投影到mapgis图上地图投影是gis知识体系中重要的组成部分每个gis软件都会涉及到这一部分知识并不是只有mapgis软件中才有mapgis软件中的投影变换相比国外的软件更具有针对性更符合我们国家的国情比如标准框等我这里只是给大家说说我对投影变换的一个理解讲很多的知识点串起来不正确的地方还请大家给予批评指正投影变换我个人理解就是对投影进行变换只要把握住了这个核心的思想其他的就不在那么难理解了那么下面就要搞清楚两个问题就是什么是投影
甘肃省核地质 212 大队物探队笔记
MAPGIS 软件应用
如何将 GPS 坐标点投影到 MAPGIS 图上
GPS卫星坐标计算
GPS卫星坐标计算GPS(全球定位系统)是一种通过地球上的卫星提供位置和时间信息的导航系统。
GPS卫星坐标计算是指根据接收到的卫星信号来确定观测站位于球面上的位置。
GPS系统是由一组位于中轨道上的卫星组成,它们每天绕地球运行两次,以提供全球的覆盖范围。
每个卫星都携带有高精度的原子钟,用来产生精确的时间信号。
GPS接收机位于地面上,它接收到来自多颗卫星的信号,并测量信号的到达时间和卫星位置。
经过计算,接收机可以确定自身的空间坐标。
计算GPS卫星坐标的过程可以分为以下几个步骤:1.接收卫星信号:GPS接收机通过天线接收到来自多颗卫星的信号。
2.测量信号到达时间:接收机测量每个信号的到达时间,这需要精确的时钟。
由于GPS接收机一般没有原子钟那样的高精度时钟,所以需要利用接收到的卫星信号来校准本地时钟。
3.计算卫星位置:GPS接收机需要知道每颗卫星在接收时间点的准确位置。
每颗卫星通过广播自身的位置和时间信息,接收机可以根据接收到的信号来计算卫星的位置。
4.求解距离:接收机通过测量信号到达时间和卫星位置计算出距离。
由于信号的传播速度是已知的大约是光速,我们可以根据距离和到达时间计算出信号的传播时间。
5.根据接收到的信号来计算自身的位置。
接收机通过多个卫星信号的距离来确定自身的位置,这涉及到多种解算方法,例如最小二乘估计等。
接收机需要至少接收到四颗卫星的信号来解算自身的位置。
这些步骤涉及到大量的数学和物理计算,例如测量时间、测量距离、计算坐标等。
为了提高计算的精度,还需要考虑一些因素,例如信号传播时的大气延迟等。
总的来说,GPS卫星坐标计算是一项复杂而精确的工程,涉及到多个步骤和数学模型。
随着技术的不断进步,GPS定位的精度和可靠性也在不断提高,为导航、地球科学等领域的应用提供了重要的支持。
GIS学习笔记——地图投影与GPS参数计算要点电子教案

GIS学习笔记——地图投影与GPS参数计算1、椭球体GIS中的坐标系定义由基准面和地图投影两组参数确定,而基准面的定义则由特定椭球体及其对应的转换参数确定。
基准面是利用特定椭球体对特定地区地球表面的逼近,因此每个国家或地区均有各自的基准面。
基准面椭球体的几何定义:O是椭球中心,NS为旋转轴,a为长半轴,b为短半轴。
子午圈:包含旋转轴的平面与椭球面相截所得的椭圆。
纬圈:垂直于旋转轴的平面与椭球面相截所得的圆,也叫平行圈。
赤道:通过椭球中心的平行圈。
基本几何参数:其中a、b称为长度元素;扁率α反映了椭球体的扁平程度。
偏心率e和e’是子午椭圆的焦点离开中心的距离与椭圆半径之比,它们也反映椭球体的扁平程度,偏心率愈大,椭球愈扁。
套用不同的椭球体,同一个地点会测量到不同的经纬度。
下面是几种常见的椭球体及参数列表。
几种常见的椭球体参数值2、地图投影地球是一个球体,球面上的位置,是以经纬度来表示,我们把它称为“球面坐标系統”或“地理坐标系統”。
在球面上计算角度距离十分麻烦,而且地图是印刷在平面纸张上,要将球面上的物体画到紙上,就必须展平,这种将球面转化为平面的过程,称为“投影”。
经由投影的过程,把球面坐标换算为平面直角坐标,便于印刷与计算角度与距离。
由于球面無法百分之百展为平面而不变形,所以除了地球仪外,所有地图都有某些程度的变形,有些可保持面积不变,有些可保持方位不变,视其用途而定。
目前国际间普遍采用的一种投影,是即横轴墨卡托投影(Transverse Mecator Projection),又称为高斯-克吕格投影(Gauss-Kruger Projection),在小范围内保持形状不变,对于各种应用较为方便。
我们可以想象成将一个圆柱体橫躺,套在地球外面,再将地表投影到这个圆柱上,然后将圆柱体展开成平面。
圆柱与地球沿南北经线方向相切,我们将这条切线称为“中央经线”。
在中央经线上,投影面与地球完全密合,因此图形没有变形;由中央经线往東西两侧延伸,地表图形会被逐渐放大,变形也会越来越严重。
卫星导航定位算法_常用参数和公式
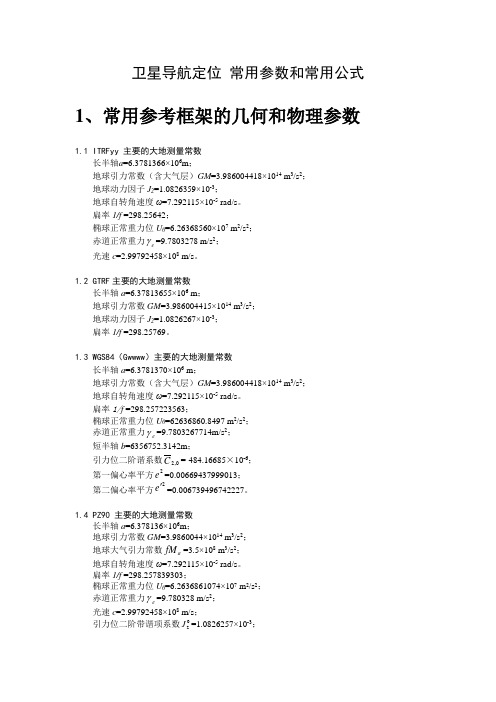
卫星导航定位常用参数和常用公式1、常用参考框架的几何和物理参数1.1 ITRFyy 主要的大地测量常数长半轴a=6.3781366×106m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球动力因子J2=1.0826359×10-3;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.25642;椭球正常重力位U0=6.26368560×107 m2/s2;γ=9.7803278 m/s2;赤道正常重力e光速c=2.99792458×108 m/s。
1.2 GTRF主要的大地测量常数长半轴a=6.37813655×106 m;地球引力常数GM=3.986004415×1014 m3/s2;地球动力因子J2=1.0826267×10-3;扁率1/f =298.25769。
1.3 WGS84(Gwwww)主要的大地测量常数长半轴a=6.3781370×106 m;地球引力常数(含大气层)GM=3.986004418×1014 m3/s2;地球自转角速度ω=7.292115×10-5 rad/s。
扁率1/f =298.257223563;椭球正常重力位U0=62636860.8497 m2/s2;γ=9.7803267714m/s2;赤道正常重力e短半轴b=6356752.3142m;引力位二阶谐系数C=-484.16685×10-6;2,0第一偏心率平方2e=0.00669437999013;e'=0.006739496742227。
第二偏心率平方21.4 PZ90 主要的大地测量常数长半轴a=6.378136×106m;地球引力常数GM=3.9860044×1014 m3/s2;fM=3.5×108 m3/s2;地球大气引力常数a地球自转角速度ω=7.292115×10-5 rad/s。
GIS常见的基本算法

GIS常见的基本算法GIS(地理信息系统)领域中使用的基本算法非常多样化,可以分为数据处理算法、空间分析算法和地理可视化算法等方面。
以下是一些常见的基本算法:1.地图投影算法:地图投影是将地球表面上的经纬度坐标映射到平面坐标系上的过程。
常见的地图投影算法包括经纬度转换为平面坐标的算法,如墨卡托投影、等距圆柱投影、兰勃托投影等。
2.空间索引算法:空间索引算法是对空间数据进行高效存储和检索的关键。
常见的空间索引算法包括四叉树、R树、k-d树等。
这些算法能够将空间数据分割成多个子区域,并建立索引结构,以便在查询时快速定位目标数据。
3.空间插值算法:空间插值算法用于在已知或有限的观测点上估算未知点的值。
常见的空间插值算法包括反距离加权插值(IDW)、克里金插值和径向基函数插值等。
4.空间分析算法:空间分析算法用于研究地理现象之间的空间关系。
常见的空间分析算法包括缓冲区分析、空间叠置分析、网络分析、空间聚类分析等。
5.地图匹配算法:地图匹配是将实际观测点与地理信息数据库中的地理对象进行匹配的过程。
常见的地图匹配算法包括最短路径算法、马尔可夫链算法、HMM(隐马尔可夫模型)等。
6.空间平滑算法:空间平滑算法用于消除地理数据中的噪声和不规则性。
常见的空间平滑算法包括高斯滤波、均值滤波、中值滤波等。
7.空间插值算法:空间插值算法用于对连续型地理现象进行预测和估计。
常见的空间插值算法包括反距离加权插值(IDW)、克里金插值和径向基函数插值等。
8.地理网络算法:地理网络算法用于在地理网络上找到最短路径、最小生成树等。
常见的地理网络算法包括迪杰斯特拉算法、弗洛伊德算法等。
9.地理可视化算法:地理可视化算法用于将地理信息以可视化的形式展现出来。
常见的地理可视化算法包括等值线绘制算法、色彩映射算法、3D可视化算法等。
10.遥感图像分类算法:遥感图像分类是将遥感图像中的像素分配到不同的类别中的过程。
常见的遥感图像分类算法包括最大似然分类、支持向量机(SVM)分类、随机森林分类等。
GPS静态基线解算投影面与投影带选择
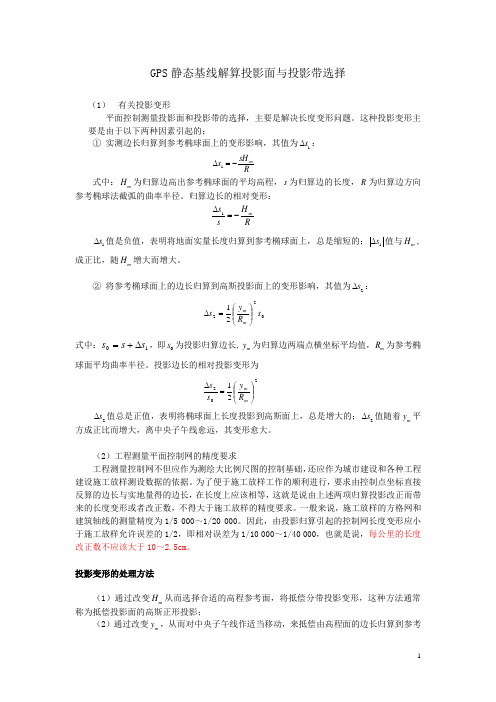
GPS 静态基线解算投影面与投影带选择(1) 有关投影变形平面控制测量投影面和投影带的选择,主要是解决长度变形问题。
这种投影变形主要是由于以下两种因素引起的:① 实测边长归算到参考椭球面上的变形影响,其值为1s ∆:RsH s m -=∆1式中:m H 为归算边高出参考椭球面的平均高程,s 为归算边的长度,R 为归算边方向参考椭球法截弧的曲率半径。
归算边长的相对变形:RHss m-=∆11s ∆值是负值,表明将地面实量长度归算到参考椭球面上,总是缩短的;1s ∆值与m H ,成正比,随m H 增大而增大。
② 将参考椭球面上的边长归算到高斯投影面上的变形影响,其值为2s ∆:02221s R y s mm⎪⎪⎭⎫⎝⎛=∆式中:10s s s ∆+=,即0s 为投影归算边长,m y 为归算边两端点横坐标平均值,m R 为参考椭球面平均曲率半径。
投影边长的相对投影变形为2221⎪⎪⎭⎫⎝⎛=∆mm R y s s2s ∆值总是正值,表明将椭球面上长度投影到高斯面上,总是增大的;2s ∆值随着my 平方成正比而增大,离中央子午线愈远,其变形愈大。
(2)工程测量平面控制网的精度要求工程测量控制网不但应作为测绘大比例尺图的控制基础,还应作为城市建设和各种工程建设施工放样测设数据的依据。
为了便于施工放样工作的顺利进行,要求由控制点坐标直接反算的边长与实地量得的边长,在长度上应该相等,这就是说由上述两项归算投影改正而带来的长度变形或者改正数,不得大于施工放样的精度要求。
一般来说,施工放样的方格网和建筑轴线的测量精度为1/5 000~1/20 000。
因此,由投影归算引起的控制网长度变形应小于施工放样允许误差的1/2,即相对误差为1/10 000~1/40 000,也就是说,每公里的长度改正数不应该大于10~2.5cm 。
投影变形的处理方法(1)通过改变m H 从而选择合适的高程参考面,将抵偿分带投影变形,这种方法通常称为抵偿投影面的高斯正形投影;(2)通过改变m y ,从而对中央子午线作适当移动,来抵偿由高程面的边长归算到参考椭球面上的投影变形,这就是通常所说的任意带高斯正形投影;(3)通过既改变m H (选择高程参考面),又改变m y (移动中央子午线),来共同抵偿两项归算改正变形,这就是所谓的具有高程抵偿面的任意带高斯正形投影。
gpsgis知识点总结

gpsgis知识点总结GPS(全球定位系统)和GIS(地理信息系统)是目前地理信息技术中最常用的两种技术。
GPS是通过卫星定位系统来获取地理信息数据,而GIS是将地理信息数据进行管理、分析和展示的一种技术。
本文将对GPS/GIS的相关知识点进行总结,并探讨其在实际应用中的重要性和作用。
一、GPS(全球定位系统)知识点总结1. GPS的基本原理GPS是一种利用卫星定位技术获取地理位置信息的系统。
其基本原理是通过地面的接收装置接收来自卫星的信号,然后根据信号的时间差和信号源的位置来计算出接收装置所在的地理位置。
2. GPS的卫星系统GPS系统由一组至少24颗卫星组成,这些卫星分布在地球的轨道上,以确保在任何时刻都能够接收到至少4颗卫星的信号,从而实现定位功能。
3. GPS的定位精度GPS的定位精度取决于接收装置所接收到的卫星信号数量和质量,一般来说,接收到的卫星信号数量越多,定位精度越高。
4. GPS的应用领域GPS的应用领域非常广泛,包括航空航海、交通运输、地质勘探、气象预报、地震监测等。
5. GPS的发展趋势随着科技的不断进步,GPS技术也在不断发展,未来的GPS系统将更加精准和智能化,可以应用于更多的领域。
二、GIS(地理信息系统)知识点总结1. GIS的基本概念GIS是一种将地理信息数据进行管理、分析和展示的系统,它能够将空间数据和属性数据进行结合,并通过地图等方式展现出来。
2. GIS的数据类型GIS系统中的数据主要分为空间数据和属性数据两种。
空间数据包括点、线、面等几何对象的地理位置信息,属性数据包括这些对象的属性信息,如名称、面积、人口等。
3. GIS的数据来源GIS系统的数据来源非常广泛,包括地图、卫星影像、人口统计数据、气象数据等,这些数据通过数字化处理后可以被GIS系统使用。
4. GIS的数据处理GIS系统通过空间分析、地图制图、数据查询等功能对地理数据进行处理,从而生成各种分析报告、统计图表等输出结果。
GPS数据点投影变换
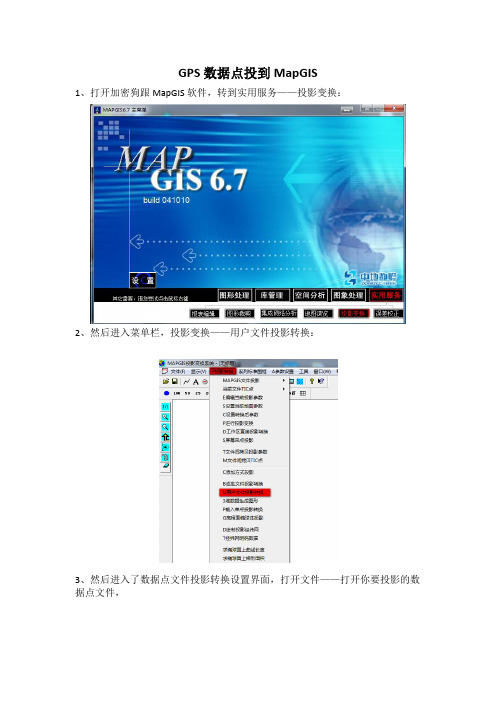
GPS数据点投到MapGIS1、打开加密狗跟MapGIS软件,转到实用服务——投影变换:2、然后进入菜单栏,投影变换——用户文件投影转换:3、然后进入了数据点文件投影转换设置界面,打开文件——打开你要投影的数据点文件,我们GPS的数据点要在文本文档中处理成如下格式,以便投影转换。
换成了平面直角坐标,因此坐标系类型应为投影平面直角,椭球参数为北京54,因为我们用的是北京54坐标,投影类型位高斯投影,比例尺分母——因为我们GPS的点为实际投影点,是1:1的图,因此这里为1,单位则为米,椭球面高程为0,投影分带类型为3分带(1:10000及更大比例尺用3分带,1:25000到1:500000使用6分带),然后确定5、接着就是结果投影参数设置,这里我们就得注意了,其他的都是一样的,就是比例尺分母,因为我们要把GPS实际的点1:10000投到图上去,因此结果投影参数比例尺分母为10000,,MapGIS里面的单位为毫米,如下:因此设置分隔符逗号前面勾下,属性名称所在行选中ID,X,Y,H如下:7、然后指定X所在列和Y所在列,因为第一列是ID,第二列是X,第三列是Y,选完之后在左上角随便点第几行,然后右上角会对应显示相应的坐标:8、点图元参数,设置自己需要的参数9、然后投影变换,之后确定10、然后1:1显示,因为我们投影出来的是点图元跟点注释,因此只有点文件,选中点文件就行了:11、然后把点文件保存就行了,选中点文件保存到相应目录就可以了:12、然后进入然后软件图形处理——输入编辑,左边添加项目把我们之前的文件添加进来处理下,弹出错误对话框,点确定就可以了:13、我们会发现我们我们进来的点都没有ID也就是标注,因此我们需要手动把标注加进来,点编辑——根据属性标注释:14、我们需要把ID标注出来,因此标注域名选择ID,添加到文件这里(假如想把ID保存到另一个点文件中,这里你只需要在工程文件面板中添加点文件,然后在这里选择你添加的那个点文件,点确定即可),这里不需要单独分开,我们就把注释跟点图元放在一起:15、然后就是编辑标注的颜色了,设置自己需要的参数即可:16、然后就得到你我们想要的文件了,也完成了GPS数据点的投影变换了,其中主要的还是靠个人的理解,理解了就能很好的灵活运用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参数计算学习笔记——地图投影与GPSGIS、椭球体1而基准面的定义则由特定椭球体及其对应的转GIS中的坐标系定义由基准面和地图投影两组参数确定,换参数确定。
基准面基准面是利用特定椭球体对特定地区地球表面的逼近,因此每个国家或地区均有各自的基准面。
是在椭球体基础上建立的,椭球体可以对应多个基准面,而基准面只一个椭球体。
椭球体的几何定义:为短半轴。
为长半轴,b为旋转轴,O是椭球中心,NSa 子午圈:包含旋转轴的平面与椭球面相截所得的椭圆。
纬圈:垂直于旋转轴的平面与椭球面相截所得的圆,也叫平行圈。
赤道:通过椭球中心的平行圈。
基本几何参数:是子午椭圆的焦点离开中心'和α反映了椭球体的扁平程度。
偏心率ee称为长度元素;扁率、其中ab 的距离与椭圆半径之比,它们也反映椭球体的扁平程度,偏心率愈大,椭球愈扁。
套用不同的椭球体,同一个地点会测量到不同的经纬度。
下面是几种常见的椭球体及参数列表。
几种常见的椭球体参数值2、地图投影地球是一个球体,球面上的位置,是以经纬度来表示,我们把它称为“球面坐标系統”或“地理坐标系統”。
在球面上计算角度距离十分麻烦,而且地图是印刷在平面纸张上,要将球面上的物体画到紙上,就必须展平,这种将球面转化为平面的过程,称为“投影”。
经由投影的过程,把球面坐标换算为平面直角坐标,便于印刷与计算角度与距离。
由于球面無法百分之百展为平面而不变形,所以除了地球仪外,所有地图都有某些程度的变形,有些可保持面积不变,有些可保持方位不变,视其用途而定。
目前国际间普遍采用的一种投影,是即横轴墨卡托投影(Transverse Mecator Projection),又称为高斯-克吕格投影(Gauss-Kruger Projection),在小范围内保持形状不变,对于各种应用较为方便。
我们可以想象成将一个圆柱体橫躺,套在地球外面,再将地表投影到这个圆柱上,然后将圆柱体展开成平面。
圆柱与地球沿南北经线方向相切,我们将这条切线称为“中央经线”。
在中央经线上,投影面与地球完全密合,因此图形没有变形;由中央经线往東西两侧延伸,地表图形会被逐渐放大,变形也会越来越严重。
为了保持投影精度在可接受范围内,每次只能取中央经线两侧附近地区来用,因此必须切割为许多投影带。
就像将地球沿南北子午线方向,如切西瓜一般,切割为若干带状,再展成平面。
目前世界各国军用地图所采用之UTM 坐标系統(Universal Transverse Mecator Projection System),即为横轴投影的一种。
是将地球沿子午线方向,每隔6 度切割为一带,全球共切割为60 个投影带地图投影几何分类主要包括:结合变形性质和几何投影,投影分类包括:3、GIS中地图投影的定义我国的基本比例尺地形图(1:5千,1:1万,1:2.5万,1:5万,1:10万,1:25万,1:50万,1:100万)中,大于等于50万的均采用高斯-克吕格投影(Gauss-Kruger);小于50万的地形图采用正轴等角割园锥投影,又叫兰勃特投影(Lambert Conformal Conic);海上小于50万的地形图多用正轴等角园柱投影,又叫墨卡托投影(Mercator),我国的GIS系统中应该采用与我国基本比例尺地形图系列一致的地图投影系统。
相应高斯-克吕格投影、兰勃特投影、墨卡托投影需要定义的坐标系参数序列如下:高斯-克吕格:投影代号(Type),基准面(Datum),单位(Unit),中央经度(OriginLongitude),原点纬度(OriginLatitude),比例系数(ScaleFactor),东伪偏移(FalseEasting),北纬偏移(FalseNorthing)兰勃特:投影代号(Type),基准面(Datum),单位(Unit),中央经度(OriginLongitude),原点纬度(OriginLatitude),标准纬度1(StandardParallelOne),标准纬度2(StandardParallelTwo),东伪偏移(FalseEasting),北纬偏移(FalseNorthing)墨卡托:投影代号(Type),基准面(Datum),单位(Unit),原点经度(OriginLongitude),原点纬度(OriginLatitude),标准纬度(StandardParallelOne)在城市GIS系统中均采用6度或3度分带的高斯-克吕格投影,因为一般城建坐标采用的是6度或3度分带,每一个分带构成一个独立的平面3度或6度分带的高斯-克吕格投影坐标。
高斯-克吕格投影以.直角坐标网,投影带中央经线投影后的直线为X轴(纵轴,纬度方向),赤道投影后为Y轴(横轴,经度方向),为了防止经度方向的坐标出现负值,规定每带的中央经线西移500公里,即东伪偏移值为500公里,由于高斯-克吕格投影每一个投影带的坐标都是对本带坐标原点的相对值,所以各带的坐标完全相同,因此规定在横轴坐标前加上带号,如(4231898,21655933)其中21即为带号,同样所定义的东伪偏移值也需要加上带号,如21带的东伪偏移值为21500000米。
假如你的工作区位于21带,即经度在120度至126度范围,该带的中央经度为123度,采用Pulkovo 1942基准面,那么定义6度分带的高斯-克吕格投影坐标系参数为:(8,1001,7,123,0,1,21500000,0)。
4、大地坐标系有了椭球体以及地图投影,坐标系就能确定下来了。
北京54和西安80是我们使用最多的坐标系。
我们通常称谓的北京54坐标系、西安80坐标系实际上使用的是我国的两个大地基准面北京54基准面和西安80基准面。
我国参照前苏联从1953年起采用克拉索夫斯基(Krassovsky)椭球体建立了我国的北京54坐标系,1978年采用国际大地测量协会推荐的1975地球椭球体建立了我国新的大地坐标系——西安80坐标系,目前大地测量基本上仍以北京54坐标系作为参照,北京54与西安80坐标之间的转换可查阅国家测绘局公布的对照表。
WGS-84坐标系采用WGS1984基准面及WGS84椭球体,它是一地心坐标系,即以地心作为椭球体中心,目前GPS 测量数据多以WGS1984为基准。
北京54坐标系北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以格拉索夫斯基椭球为基础,经局部平差后产生的坐标系,与苏联1942年建立的以普尔科夫天文台为原点的大地坐标系统相联系,相应的椭球为克拉索夫斯基椭球。
到20世纪80年代初,我国已基本完成了天文大地测量,经计算表明,54坐标系统普遍低于我国的大地水准面,平均误差为29米左右。
西安80坐标系西安80是为了进行全国天文大地网整体平差而建立的。
根据椭球定位的基本原理,在建立西安80坐标系时有以下先决条件:(1)大地原点在我国中部,具体地点是陕西省径阳县永乐镇;(2)西安80坐标系是参心坐标系,椭球短轴Z轴平行于地球质心指向地极原点方向,大地起始子午面平行于格林尼治平均天文台子午面;X轴在大地起始子午面内与Z轴垂直指向经度0方向;Y轴与Z、X轴成右手坐标系;(3)椭球参数采用IUG 1975年大会推荐的参数,因而可得西安80椭球两个最常用的几何参数为:长轴:6378140±5(m);扁率:1:298.257椭球定位时按我国范围内高程异常值平方和最小为原则求解参数。
(4)多点定位;(5)大地高程以1956年青岛验潮站求出的黄海平均水面为基准。
WGS-84坐标系WGS-84(World Geodetic System,1984年)是美国国防部研制确定的大地坐标系,其坐标系的几何定义是:原点在地球质心,z轴指向BIH 1984.0定义的协议地球极(CTP)方向,X轴指向BIH 1984.0 的零子午面和CTP赤道的交点。
Y轴与Z、X轴构成右手坐标系(如图所示)。
WGs-84椭球及有关常数:对应于WGS-8大地坐标系有一个WGS-84椭球,其常数采用IUGG第17届大会大地测量常数的推荐值。
WGS-84椭球的几何常数:长半轴:6378137±2(m)扁率:1 / 298.257223563地球引力常数(含大气层)GM=3986005正常化二阶带谐系数C2.0=-484.16685×10-6地球自转角速度w=7292115×10-11 rads -1主要几何和物理常数短半径b=6356752.3142 m扁率f=1/298.257223563第一偏心率平方e2=0.00669437999013第二偏心率平方e'2 =0.006739496742227橢球正常重力位U0=62636860.8497m2s-2赤道正常重力r0=9.9703267714ms-25.几个名词解释将球面坐标转化为平面坐标的过程便称为投影大地坐标(Geodetic Coordinate):大地测量中以参考椭球面为基准面的坐标。
地面点P的位置用大地经度L、大地纬度B和大地高H表示。
当点在参考椭球面上时,仅用大地经度和大地纬度表示。
大地经度是通过该点的大地子午面与起始大地子午面之间的夹角,大地纬度是通过该点的法线与赤道面的夹角,大地高是地面点沿法线到参考椭球面的距离。
方里网:是由平行于投影坐标轴的两组平行线所构成的方格网。
因为是每隔整公里绘出坐标纵线和坐标横线,所以称之为方里网,由于方里线同时又是平行于直角坐标轴的坐标网线,故又称直角坐标网。
在1:1万——1:20万比例尺的地形图上,经纬线只以图廓线的形式直接表现出来,并在图角处注出相应度数。
为了在用图时加密成网,在内外图廓间还绘有加密经纬网的加密分划短线(图式中称“分度带”),必要时对应短线相连就可以构成加密的经纬线网。
1:2 5万地形图上,除内图廓上绘有经纬网的加密分划外,图内还有加密用的十字线。
我国的1:50万——1:100万地形图,在图面上直接绘出经纬线网,内图廓上也有供加密经纬线网的加密分划短线。
直角坐标网的坐标系以中央经线投影后的直线为X轴,以赤道投影后的直线为Y轴,它们的交点为坐标原点。
这样,坐标系中就出现了四个象限。
纵坐标从赤道算起向北为正、向南为负;横坐标从中央经线算起,向东为正、向西为负。
虽然我们可以认为方里网是直角坐标,大地坐标就是球面坐标。
但是我们在一副地形图上经常见到方里网和经纬度网,我们很习惯的称经纬度网为大地坐标,这个时候的大地坐标不是球面坐标,她与方里网的投影是一样的(一般为高斯投影),也是平面坐标。
Albers:等面积割圆锥投影,一般涉及到面积的图用它,比如土地利用图等。
Lambert(Lambert Conformal Conic):等角割圆锥投影,小比例尺地形图、政区图等常用。