基于STM的智能服务型多功能多足机器人
基于STM32单片机的智能搬运机器人的设计
基于STM32单片机的智能搬运机器人的设计作者:黄钰深张晓培梁金耀赵明范碧纯来源:《科技视界》2019年第12期0 引言智能机器人带有多种传感器,可以将传感器得到的信息进行融合,有效地适应变化的环境[1]。
本文设计的搬运机器人只要在PC端上位机上设置搬运停放的位置,搬运机器人进行自主运动,根据指定的路线行进到指定位置。
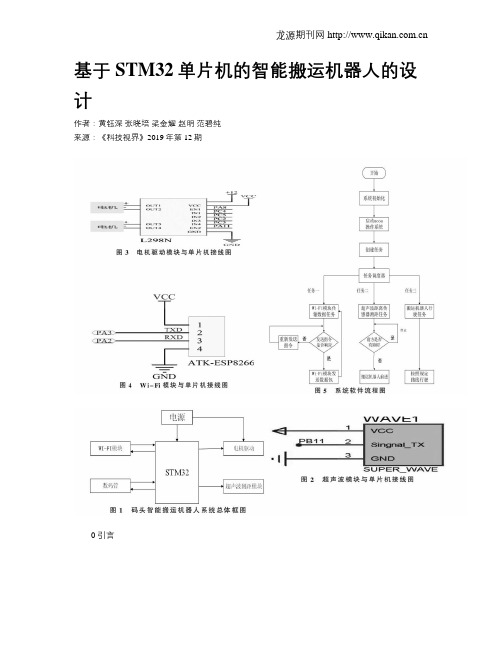
1 智能搬运机器人系统设计方案系统设计中选用STM32单片机作为主控制器,负责接收指令和逻辑运算。
WI-FI模块作为搬运机器人与PC端上位机之间通讯的桥梁,负责传输数据以及各种指令。
使得PC端上位机可以实时控制搬运机器人。
电机及电机驱动模块及电机是系统的动力部分。
超声波模块负责检测搬运机器人在前进线路上是否有障碍[2],并作出调整直到搬运机器人道达指定位置。
系统的总体框图如图1所示。
2 智能搬运机器人硬件设计2.1 控制模块的选择STM32是一种常用的开发芯片,其运算速度快、精度高、能耗小等,并且易于开发。
本系统采STM32F103RCT6作为控制系统的主控制器,完成超声波信息收集、避障、行进、搬运等任务。
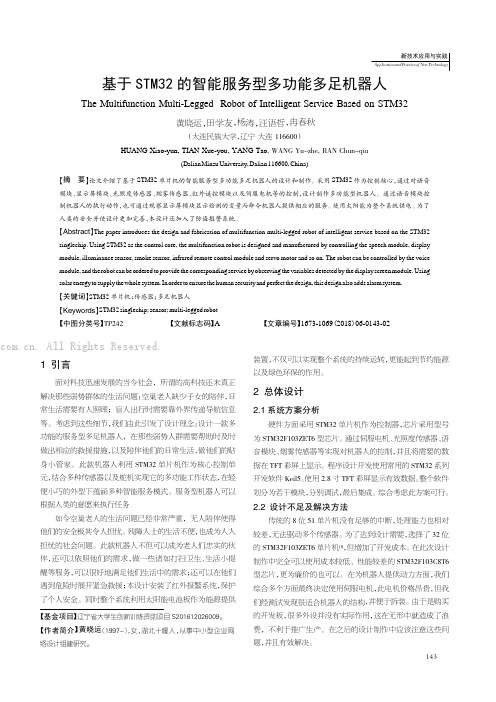
2.2 超声波传感器模块本设计的避障采用的是超声波测距离传感器。
超声波测距是通过发射超声波,在遇到障碍物后超声波会被反射被接收器接收到[3]。
其与单片机的接线图如图2所示。
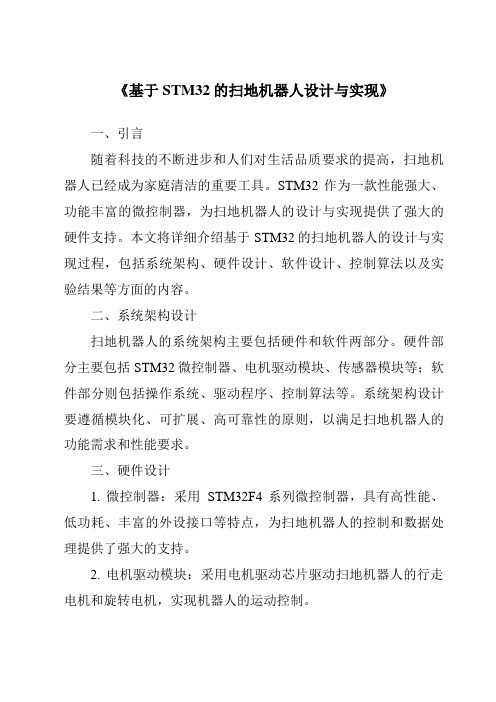
2.3 电机驱动模块此系统的电机驱动模块采用L298N芯片。
在单片机接上模块相应的控制引脚,通过单片机即可控制电机的正、反转以及速度。
四个电机的不同状态的配合完成小车的前进、后退、左、右转等功能。
其与单片机的连接如图3所示。
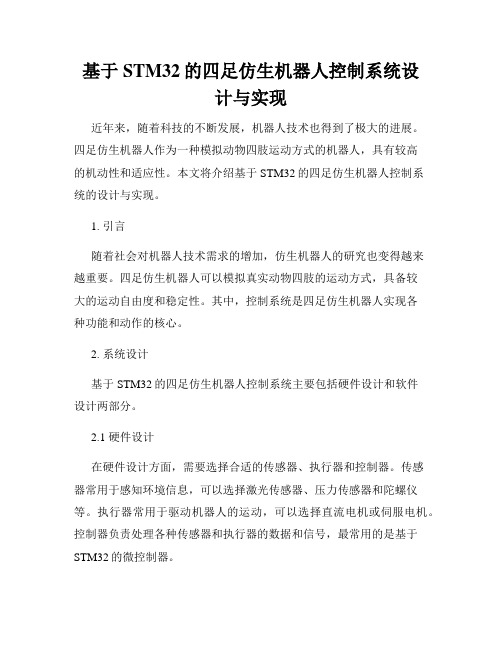
2.4 WIFI通信模块本设计上位机和下位机进行数据传输采用的无线传输WiFi模块ESP8266。
其电路连接如图4所示。
3 系统软件设计部分3.1 UCOS操作系统为了使得系统实时性良好,本设计在单片机上运行了UCOS系统。
实时操作系统可以运行多任务,操作系统可以及时对任务进行处理[4]。
3.2 上位机界面设计该设计可以实现在上位机设置搬运机器人停放的位置。
基于STM32的智能服务型多功能多足机器人
1引言面对科技迅速发展的当今社会,所谓的高科技还未真正解决那些弱势群体的生活问题:空巢老人缺少子女的陪伴,日常生活需要有人照顾;盲人出行时需要靠外界传递导航信息等。
考虑到这些细节,我们由此引发了设计理念:设计一款多功能的服务型多足机器人,在那些弱势人群需要帮助时及时做出相应的救援措施,以及陪伴他们的日常生活,做他们的贴身小管家。
此款机器人利用STM32单片机作为核心控制单元,结合多种传感器以及舵机实现它的多功能工作状态,在轻便小巧的外型下蕴涵多种智能服务模式。
服务型机器人可以根据人类的意愿来执行任务如今空巢老人的生活问题已经非常严重,无人陪伴使得他们的安全极其令人担忧。
残障人士的生活不便,也成为人人担忧的社会问题。
此款机器人不但可以成为老人们忠实的伙伴,还可以依照他们的需求,做一些诸如打扫卫生、生活小提醒等服务,可以很好地满足他们生活中的需求;还可以在他们遇到危险时展开紧急救援;本设计安装了红外报警系统,保护了个人安全。
同时整个系统利用太阳能电池板作为能源提供装置,不仅可以实现整个系统的持续运转,更能起到节约能源以及绿色环保的作用。
2总体设计2.1系统方案分析硬件方面采用STM32单片机作为控制器,芯片采用型号为STM32F103ZET6型芯片。
通过伺服电机、光照度传感器、语音模块、烟雾传感器等实现对机器人的控制,并且将需要的数据在TFT 彩屏上显示。
程序设计开发使用常用的STM32系列开发软件Keil5。
使用2.8寸TFT 彩屏显示有效数据。
整个软件划分为若干模块,分别调试,最后集成。
综合考虑此方案可行。
2.2设计不足及解决方法传统的8位51单片机没有足够的中断,处理能力也相对较差,无法驱动多个传感器。
为了达到设计需要,选择了32位的STM32F103ZET6单片机[1],但增加了开发成本。
在此次设计制作中完全可以使用成本较低、性能较差的STM32F103C8T6型芯片,更为廉价的也可以。
在为机器人提供动力方面,我们综合多个方面最终决定使用伺服电机,此电机价格昂贵,但我们经测试发现很适合机器人的结构,并便于拆装。
基于Arduino的双足机器人控制方法

基于Arduino的双足机器人控制方法摘要:本论文就如何实现机器人预定的功能展开讨论。
该双足竞步机器人系统基于软件平台Arduino为软件开发环境;硬件由窄足机器人、stm32f103zet6单片机、arduino开发板、漫反射激光传感器、超声波测距模块、舵机模块等器件构成。
通过Arduino编写主逻辑程序控制32开发板产生PWM波,并通过漫反射激光传感器和超声波测距模块采集数据,在程序中经过数据处理调整占空比来改变舵机的运动状态,进而实现控制六个舵机的同时转动,从而达到智能控制机器人的效果。
为了提高双足竞步机器人的动作以及寻迹的准确性和可靠性,我们试验了多套方案并进行升级,进行了大量的测试与调试,最终确定了现有的系统结构和各项控制参数。
关键词:双足竞步;漫反射激光传感器;超声波测距;舵机;PWM 正文随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。
结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的机器人和各种智能机器。
机器人技术是一门综合了传感和检测、控制理论、信息科学与技术、电子工程、机械工程、图像采集与识别技术以及人工智能等前沿科技的新型学科,它融合了机械、电子、传感器、计算机硬件、软件、单片机、人工智能等许多学科的知识,涉及到当前许多前沿领域的技术。
随着电子技术的飞速发展,智能机器人在越来越多的领域发挥着人类无法代替的作用。
其中,双足机器人就是当今机器人研究领域最为前沿的课题之一,双足机器人是一种高度非线性、强耦合的对象,反映了一个国家的智能化和自动化研究水平,双足机器人研究已成为目前非常活跃的的一个研究领域。
为了推动我国机器人技术的发展,培养学生创新能力,在全国范围内相继出现了一系列的机器人竞赛。
进行双足机器人的研究可以使学生把理论与实践紧密地结合起来,提高学生的动手能力、创造能力、协作能力和综合能力,进而达到课堂知识学以致用的目的。
《基于STM32的扫地机器人设计与实现》
《基于STM32的扫地机器人设计与实现》一、引言随着科技的不断进步和人们对生活品质要求的提高,扫地机器人已经成为家庭清洁的重要工具。
STM32作为一款性能强大、功能丰富的微控制器,为扫地机器人的设计与实现提供了强大的硬件支持。
本文将详细介绍基于STM32的扫地机器人的设计与实现过程,包括系统架构、硬件设计、软件设计、控制算法以及实验结果等方面的内容。
二、系统架构设计扫地机器人的系统架构主要包括硬件和软件两部分。
硬件部分主要包括STM32微控制器、电机驱动模块、传感器模块等;软件部分则包括操作系统、驱动程序、控制算法等。
系统架构设计要遵循模块化、可扩展、高可靠性的原则,以满足扫地机器人的功能需求和性能要求。
三、硬件设计1. 微控制器:采用STM32F4系列微控制器,具有高性能、低功耗、丰富的外设接口等特点,为扫地机器人的控制和数据处理提供了强大的支持。
2. 电机驱动模块:采用电机驱动芯片驱动扫地机器人的行走电机和旋转电机,实现机器人的运动控制。
3. 传感器模块:包括红外传感器、超声波传感器、陀螺仪等,用于实现扫地机器人的避障、定位和姿态控制等功能。
四、软件设计1. 操作系统:采用嵌入式实时操作系统,如FreeRTOS,以提高系统的实时性和稳定性。
2. 驱动程序:编写驱动程序实现微控制器与各模块的通信和控制。
3. 控制算法:包括路径规划算法、避障算法、姿态控制算法等,实现扫地机器人的自主导航和智能控制。
五、控制算法实现1. 路径规划算法:采用全局路径规划和局部路径规划相结合的方法,实现扫地机器人的高效清扫。
2. 避障算法:通过红外传感器和超声波传感器检测障碍物,实现机器人的实时避障功能。
3. 姿态控制算法:通过陀螺仪等传感器检测机器人的姿态,实现机器人的稳定控制和自主平衡。
六、实验结果与分析经过实验验证,基于STM32的扫地机器人具有以下优点:1. 高效清扫:通过全局和局部路径规划算法,实现高效清扫,提高清洁效率。
基于STM32的四足仿生机器人控制系统设计与实现
基于STM32的四足仿生机器人控制系统设计与实现近年来,随着科技的不断发展,机器人技术也得到了极大的进展。
四足仿生机器人作为一种模拟动物四肢运动方式的机器人,具有较高的机动性和适应性。
本文将介绍基于STM32的四足仿生机器人控制系统的设计与实现。
1. 引言随着社会对机器人技术需求的增加,仿生机器人的研究也变得越来越重要。
四足仿生机器人可以模拟真实动物四肢的运动方式,具备较大的运动自由度和稳定性。
其中,控制系统是四足仿生机器人实现各种功能和动作的核心。
2. 系统设计基于STM32的四足仿生机器人控制系统主要包括硬件设计和软件设计两部分。
2.1 硬件设计在硬件设计方面,需要选择合适的传感器、执行器和控制器。
传感器常用于感知环境信息,可以选择激光传感器、压力传感器和陀螺仪等。
执行器常用于驱动机器人的运动,可以选择直流电机或伺服电机。
控制器负责处理各种传感器和执行器的数据和信号,最常用的是基于STM32的微控制器。
2.2 软件设计在软件设计方面,需要编写嵌入式程序来实现机器人的各种功能和动作。
可以使用C语言或嵌入式汇编语言来编写程序。
程序需要实时处理传感器数据,控制执行器的运动,同时保证系统的稳定性和安全性。
3. 实现步骤在实现基于STM32的四足仿生机器人控制系统时,可以按照以下步骤进行:3.1 传感器数据获取通过传感器获取环境信息,并将数据传输给控制器进行处理。
可以使用SPI或I2C等通信协议进行数据传输。
3.2 运动规划根据传感器数据分析,确定机器人的运动规划。
例如,判断机器人所处环境是否有障碍物,确定机器人的步态等。
3.3 控制算法设计基于运动规划结果,设计合适的控制算法。
其中包括反馈控制、PID控制等。
控制算法需要保证机器人的稳定性和动作的准确性。
3.4 执行器控制根据控制算法计算出的控制信号,控制执行器的运动。
根据机器人的步态和动作需求,驱动各个关节实现运动。
3.5 系统优化与调试对控制系统进行优化和调试,保证系统的稳定性和性能良好。
《基于STM32移动机器人目标动态追踪的研究》范文
《基于STM32移动机器人目标动态追踪的研究》篇一一、引言随着人工智能和机器人技术的不断发展,移动机器人在各个领域的应用越来越广泛。
其中,目标动态追踪技术是移动机器人实现自主导航和智能控制的关键技术之一。
本文旨在研究基于STM32的移动机器人目标动态追踪技术,以提高机器人的智能化水平和应用范围。
二、研究背景及意义目标动态追踪技术是移动机器人实现自主导航和智能控制的重要技术之一。
在工业、军事、医疗、安防等领域,目标动态追踪技术都有着广泛的应用。
然而,传统的目标追踪方法往往存在算法复杂度高、实时性差、鲁棒性不足等问题。
因此,研究基于STM32的移动机器人目标动态追踪技术,具有重要的理论和实践意义。
STM32是一款基于ARM Cortex-M内核的微控制器,具有高性能、低功耗、易于集成等特点。
将其应用于移动机器人目标动态追踪中,可以有效地提高机器人的智能化水平和应用范围。
同时,通过对STM32的优化和改进,可以进一步提高机器人的实时性和鲁棒性,为机器人技术的进一步发展提供重要的技术支持。
三、相关技术及原理1. 移动机器人技术移动机器人技术是机器人技术的重要组成部分,涉及到机械设计、电子技术、控制技术等多个领域。
移动机器人的运动控制主要通过控制器实现,其中STM32等微控制器是常用的控制器之一。
2. 目标追踪技术目标追踪技术是利用传感器和图像处理等技术,对目标进行检测、跟踪和识别的技术。
常用的目标追踪方法包括基于滤波的方法、基于特征的方法、基于深度学习的方法等。
3. 基于STM32的目标追踪原理基于STM32的目标追踪原理主要包括传感器数据采集、图像处理和运动控制三个部分。
首先,通过传感器采集目标的位置和运动信息;其次,通过图像处理技术对目标进行检测和跟踪;最后,通过STM32控制器对机器人的运动进行控制,实现目标的动态追踪。
四、系统设计与实现1. 系统设计本系统主要由STM32控制器、摄像头、电机驱动器等部分组成。
基于STM32的双足机器人运动控制系统设计
ma k e s t h e wa l k i n g s t a b l e .T h e i n c r e a s i n g o f t h e d i s t a n c e b e t w e e n t wo p e d a l s ma k e s t h e s t r i d e b i g g e r ;a n d t h e
whi c h ma k e s de e p r e s e a r c h a b o u t t h e r o b o t ’ S k i n e t i c c o n t r o l b y a d d i n g t h e e l e c t r o n i c c o mp a s s HM C 58 8 3 t o c o r r e c t t h e r o bo t mo v i n g pa t h b y t h e f e e d ba c k. Th e r o bo t mo v i ng f o r wa r d ma i n l y d e p e n d s o n t h e wa i s t t u r ni n g,wh i c h
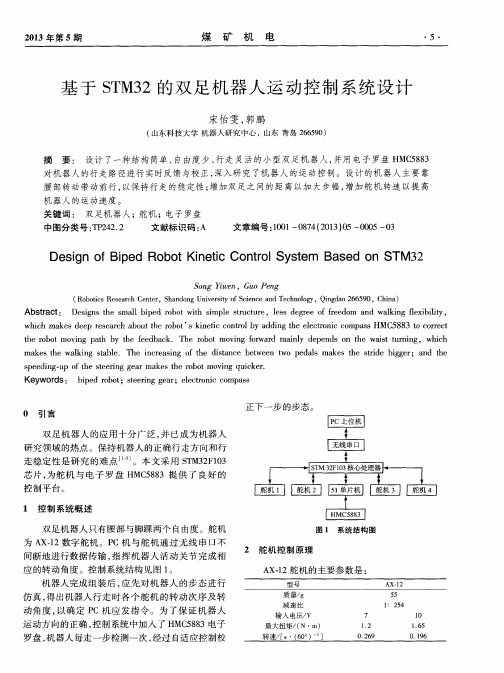
2 舵机 控 制原理
A X. 1 2舵 机 的主要 参数是 :
仿真 , 得 出机器 人 行 走 时 各 个 舵 机 的转 动 次 序 及 转 动角 度 , 以确 定 P c机 应 发 指 令 。为 了保 证 机 器 人 运 动 方 向的正 确 , 控制 系统 中加 入 了 HMC 5 8 8 3电子 罗盘 , 机 器人 每走 一步 检测 一次 , 经 过 自适应 控 制校
机器 人 的运 动速度 。
关键 词 : 双足 机器 人 ;舵机 ;电子 罗盘
中图分 类号 : T P 2 4 2 . 2 文献标识 码 : A 文章编号 : 1 0 0 1 — 0 8 7 4 ( 2 0 1 3 ) 0 5一 O O O 5— 0 3
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是一种仿生机器人,它具有类似人类双足行走的能力,可以在复杂的地形环境中自主行走、保持平衡。
随着科技的不断发展,双足机器人在工业生产、救灾救援、服务业等领域有着广泛的应用前景。
本文将介绍基于STM32F407的双足机器人的设计与制作过程。
一、STM32F407介绍STM32F407是意法半导体公司推出的一款32位高性能微控制器,它采用ARM Cortex-M4内核,主频可达168MHz,具有丰富的外设资源和强大的计算能力。
STM32F407具有丰富的接口,如通用并行接口(GPI)、通用同步/异步串行接口USART)、通用串行接口GUS)、SPI、I²C、SDIO、ADC等,可以满足双足机器人在控制、通信、传感器等方面的需求。
二、双足机器人的设计思路双足机器人的设计思路是模仿人类行走的方式,通过不断调整身体姿态和腿部关节的运动来保持平衡。
在双足机器人的设计中,需要考虑机械结构、动力系统、传感系统和控制系统等多个方面。
在本设计中,我们采用STM32F407作为控制核心,利用其丰富的接口资源和强大的计算能力,配合相关模块和传感器,完成双足机器人的设计与制作。
三、双足机器人的硬件设计1. 机械结构设计双足机器人的机械结构设计是整个项目的基础,它直接影响机器人的稳定性和可行性。
我们采用了轻质材料制作机械结构,并通过CAD软件进行设计,确保结构的合理性和稳定性。
2. 动力系统设计双足机器人的动力系统设计包括电机、电机驱动器、电源系统等部分。
我们选用了高效的直流无刷电机作为动力源,并配合合适的电机驱动器和电源系统,保证机器人的稳定性和运动性能。
3. 传感系统设计双足机器人的传感系统设计包括姿态传感器、接触传感器、视觉传感器等部分。
在本设计中,我们利用了三轴加速度计和陀螺仪传感器来获取机器人的姿态信息,利用触摸传感器来检测机器人的接触状态,同时结合视觉传感器进行环境感知和障碍物识别。
stm32单片机毕设题目
stm32单片机毕设题目
STM32单片机是一个非常流行的微控制器系列,广泛应用于各种嵌入式系
统开发。
以下是一些关于STM32单片机的毕业设计题目建议:
1. 基于STM32的智能家居控制系统
在这个项目中,你可以设计一个基于STM32的家庭自动化系统,包括温度控制、照明控制、安全系统等。
你可以使用WiFi或蓝牙等技术来实现远程
控制。
2. 基于STM32的无人机控制系统
设计一个无人机控制系统,使用STM32单片机作为主控制器,实现无人机的起飞、飞行控制、着陆等功能。
这个项目需要深入了解飞行控制算法和传感器融合技术。
3. 基于STM32的智能机器人
设计一个能够自动导航、避障、目标追踪的智能机器人。
你可以使用红外传感器、超声波传感器等来检测障碍物,使用电机驱动器来控制机器人的运动。
4. 基于STM32的音频解码器
设计一个音频解码器,能够解码MP3、AAC等格式的音频文件,并在一个
显示屏上显示歌曲名称、艺术家等信息。
你可以使用一个音频编解码器库来简化开发过程。
5. 基于STM32的物联网网关
设计一个物联网网关,能够接收来自各种传感器的数据,并将数据传输到云平台。
你可以使用WiFi、以太网等技术来实现数据传输。
以上是一些基于STM32单片机的毕业设计题目建议,希望对你有所帮助。
请注意,这些题目都需要一定的嵌入式系统开发经验和技能,包括C语言编程、电路设计、传感器技术等。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是一种仿生机器人,具有双足步行能力,能够模拟人类的步态和动作。
它具有很高的灵活性和稳定性,可以适应不同的地形和环境。
基于STM32F407的双足机器人具有先进的控制系统和智能算法,能够实现复杂的动作和任务。
本文将介绍基于STM32F407的双足机器人的设计原理、控制系统和应用场景。
一、设计原理基于STM32F407的双足机器人主要由机械结构、传感器系统、控制系统和动力系统四个部分组成。
机械结构是双足机器人的骨架,它决定了机器人的外形和运动方式。
传感器系统用于感知环境和身体状态,包括视觉传感器、惯性传感器、力传感器等。
控制系统是双足机器人的大脑,它接收传感器数据并计算出相应的动作指令。
动力系统则负责执行控制系统的指令,驱动机器人进行运动。
1. 高性能处理器:STM32F407是一款高性能的32位微控制器,具有丰富的外设和强大的计算能力,能够满足双足机器人复杂的控制算法和实时运动要求。
2. 多轴驱动:双足机器人需要精确的多轴驱动来实现步行和平衡,STM32F407提供了丰富的PWM输出通道和高速定时器,能够满足机器人的驱动需求。
3. 实时通信:双足机器人需要实时地接收和发送数据,与外部设备进行通信。
STM32F407具有丰富的通信接口和高速外设,能够满足双足机器人的通信需求。
基于STM32F407的双足机器人的设计原理可以满足机器人的高性能计算和实时控制要求,为机器人的稳定步行和复杂动作提供了坚实的技术基础。
二、控制系统基于STM32F407的双足机器人的控制系统包括感知、规划和执行三个部分,实现了双足机器人的全面控制。
感知部分主要通过传感器系统获取环境信息和身体状态,包括视觉、力觉、陀螺仪等传感器,将感知到的数据传输给控制系统。
规划部分主要通过控制算法对感知数据进行处理和分析,得出接下来的运动控制指令。
执行部分主要通过动力系统执行规划好的运动控制指令,控制机器人进行步行和平衡。
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计随着科技的不断发展,智能家居产品也变得越来越普及。
扫地机器人作为智能家居产品的一种,已经成为现代家庭清洁必备的家电之一。
它能够帮助用户自动清扫地面,提高家庭生活品质。
现在市面上的扫地机器人种类繁多,功能也各异,而其中一些高端产品采用了STM32单片机作为控制核心。
本文将对基于STM32单机的扫地机器人设计进行详细分析和介绍。
一、STM32单片机简介STM32是由意法半导体(STMicroelectronics)推出的32位高性能微控制器系列产品,拥有强大的性能和丰富的外设资源,广泛应用于各种嵌入式系统中。
STM32单片机具有低功耗、高性能、丰富的外设接口等特点,适合用于各种智能家居产品的控制系统。
STM32系列产品的开发工具和技术支持也非常完善,为开发人员提供了便利。
二、扫地机器人的工作原理扫地机器人主要由底盘模块、定位导航模块、清扫模块、电源模块和控制模块等部分组成。
其工作流程一般包括地面扫描、路径规划、清扫作业和自动充电等环节。
控制模块起着核心作用,负责整个扫地机器人的工作流程控制和各模块协调。
三、基于STM32单片机的扫地机器人设计方案基于STM32单片机的扫地机器人设计主要包括底层硬件设计和上层软件设计两个方面。
1. 底层硬件设计底层硬件设计主要涉及各种传感器、执行器及外部设备的接口电路设计。
扫地机器人通常需要激光雷达、超声波传感器、轮式驱动器、吸尘器等硬件模块,这些模块需要与STM32单片机相连,并通过各种通信接口传输数据。
控制模块还需要设计供电管理电路,以便对各模块进行电源控制和供电。
2. 上层软件设计上层软件设计是整个扫地机器人系统的大脑,负责各硬件模块的控制和协调。
基于STM32单片机的扫地机器人控制系统通常采用嵌入式操作系统作为基础,如FreeRTOS或者RT-Thread。
控制系统还需要设计各种传感器数据的处理算法、路径规划算法和清扫作业控制算法等。
基于stm32的仿生六足机器人-控制系统设计

基于STM32的六足仿生机器人-控制系统设计学院:专业:姓名:指导老师:工业自动化学院机械电子工程谢浩林学号:职称:160404102482 李琳讲师中国·珠海二○二一年五月诚信承诺书本人郑重承诺:本人承诺呈交的毕业设计《基于STM32的六足仿生机器人-控制系统设计》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,设计使用的数据真实可靠。
本人签名:谢浩林日期: 2020 年 4 月 24 日基于STM32的六足仿生机器人-控制系统设计摘要随着机器人的发展日新月异,各个行业和领域对机器人的要求和需求也日益增长。
近十几年来,由于六足仿生机器人在勘测领域的作用显著,其发展尤为迅速。
这种新型的足式机器人,借鉴了自然界中诸如蜘蛛,螳螂等昆虫的行进步态和肢体结构,使其在崎岖、松软等复杂地形上行进时,比起履带式或者轮式的机器人更加地稳定灵活,能更好对应勘测,探索等方面的工作。
本文主要研究六足仿生机器人的控制系统的实现。
通过采用STM32F103VCT6作为控制器,用蓝牙通讯控制与腿部结构相连接的舵机从而实现手控机器人的行进,并简单实现自动行进,超声波避障和拍照功能。
关键词:六足仿生机器人;STM32F103VCT6;控制系统;舵机sg90;Design of Hexapod robot control system based on STM32AbstractWith the rapid development of robots, the requirements and demands of robots in various industries and fields are increasing day by day. In recent decades, the hexapod robot has developed particularly rapidly due to its significant role in the field of surveying. The new foot-like robot borrows from the gait and limb structure of natural insects such as spiders and mantids, allowing it to navigate rough, soft and complex terrain, compared with the tracked or wheeled robot, it is more stable and flexible, and can better correspond to the exploration and exploration work.This paper mainly studies the realization of the control system of the robot. By using STM32F103VCT6 as the controller, the steering gear connected with the leg structure is controlled by Bluetooth, and the functions of automatic moving, ultrasonic obstacle avoidance and photo-taking are realized.Keywords: Hexapod robot;STM32F103VCT6;Control system;Steering Gear SG90;目录1 绪论 (1)1.1仿生六足机器人的研究背景及意义 (1)1.2仿生六足机器人在国内外的研究现状及存在的问题 (1)1.3六足仿生机器人应解决的主要问题 (3)2 主要原理 (5)2.1 仿生六足机器人行进原理 (5)2.2 STM32F103系列单片机定时器输出PWM原理 (6)2.3 OV7670摄像头图像数据输出、读取原理 (7)3 硬件选型 (9)3.1六足机器人控制系统芯片选型 (9)3.2 舵机驱动电池选型 (11)3.3 摄像头选型 (13)4 控制系统设计 (14)4.1控制系统硬件设计 (14)4.2控制器STM32F103VCT6电路原理图 (14)4.3控制系统程序框图 (15)4.4六足机器人主要功能的实现 (16)4.4.1蓝牙串口通讯 (16)4.4.2 超声波测距 (16)4.4.3 行走功能 (19)4.4.4 拍照功能部分代码 (19)5 总结与展望 (21)参考文献 (22)谢辞 (23)附录 (24)1 绪论1.1仿生六足机器人的研究背景及意义当今世界,机器人的概念已经不是简单的,由数个机械结构组合成的一个机械体。
《基于STM32的扫地机器人设计与实现》
《基于STM32的扫地机器人设计与实现》一、引言随着科技的不断进步和人工智能的广泛普及,智能扫地机器人已经成为了家庭生活的一部分。
基于这样的时代背景,本文以STM32作为主控芯片,探讨扫地机器人的设计与实现,以提高机器人的清洁效率和智能化水平。
二、系统概述本系统以STM32微控制器为核心,通过集成电机驱动、传感器模块、电源模块等,实现扫地机器人的自动扫地、避障、充电等功能。
系统采用模块化设计,便于后期维护和升级。
三、硬件设计1. 主控芯片选型:STM32微控制器。
其具备高性能、低功耗、高集成度等优点,适合用于扫地机器人等智能设备。
2. 电机驱动模块:采用直流电机和电机驱动芯片,实现扫地机器人的运动控制。
3. 传感器模块:包括红外传感器、超声波传感器等,用于实现避障、测距等功能。
4. 电源模块:为系统提供稳定的电源供应,包括电池管理和充电管理等功能。
四、软件设计1. 操作系统与开发环境:采用嵌入式操作系统,如RT-Thread等,为软件开发提供良好的环境。
2. 算法实现:通过优化扫地算法和路径规划算法,提高机器人的清洁效率和智能化水平。
3. 通信协议:设计合理的通信协议,实现扫地机器人与上位机之间的数据传输和指令控制。
五、功能实现1. 自动扫地:通过电机驱动模块和传感器模块,实现扫地机器人的自动扫地功能。
2. 避障功能:利用红外传感器和超声波传感器等,实现扫地机器人的避障功能,避免在清洁过程中碰到家具等障碍物。
3. 充电功能:当电池电量低时,扫地机器人可自动返回充电座进行充电。
4. 路径规划:通过优化算法,实现扫地机器人的高效路径规划,提高清洁效率。
六、实验与测试为了验证本设计的可行性和性能,我们进行了大量的实验和测试。
实验结果表明,本设计的扫地机器人具有较高的清洁效率和智能化水平,能够有效地完成自动扫地、避障、充电等功能。
同时,我们还对系统的稳定性和可靠性进行了测试,结果表明系统具有良好的性能和稳定性。
正点原子stm32f103c8t6的课程设计题目
正点原子stm32f103c8t6的课程设计题目
正点原子(TruePoint)的STM32F103C8T6是一款基于ARM Cortex-M3内核的微控制器,具有高性能、低功耗和易于开发的特点。
因此,对于基于STM32F103C8T6的课程设计题目,可以从多个角度和领域进行设计。
以下是一些可能的课程设计题目:
1. 智能家居控制系统:设计一个基于STM32F103C8T6的智能家居控制系统,可以实现温度、湿度、光照等环境参数的检测和控制,并可通过手机APP进行远程控制。
2. 嵌入式图形界面设计:利用STM32F103C8T6的LCD屏幕,设计一个嵌入式图形界面系统,可以实现用户界面的定制和交互操作。
3. 智能机器人:设计一个基于STM32F103C8T6的智能机器人,可以实现自主导航、避障、语音识别等功能,并可以通过手机APP进行控制。
4. 嵌入式网络通信:利用STM32F103C8T6的以太网或WiFi模块,设计一个嵌入式网络通信系统,可以实现数据的远程传输和控制。
5. 嵌入式音频处理:利用STM32F103C8T6的音频处理模块,设计一个嵌入式音频处理系统,可以实现音频信号的采集、处理和播放。
这些题目都是基于STM32F103C8T6的特点和功能进行的课程设计,可以从硬件和软件两个方向进行设计和实现,帮助学生更好地理解和掌握嵌入式系统的开发和应用。
基于STM的智能服务型多功能多足机器人

基于STM的智能服务型多功能多足机器人作者:黄晓运田学友杨涛汪语哲冉春秋来源:《中小企业管理与科技·上旬刊》2018年第07期【摘要】论文介绍了基于STM32单片机的智能服务型多功能多足机器人的设计和制作。
采用STM32作为控制核心,通过对语音模块、显示屏模块、光照度传感器、烟雾传感器、红外遥控模块以及伺服电机等的控制,设计制作多功能型机器人。
通过语音模块控制机器人的执行动作,也可通过观察显示屏模块显示检测的变量而命令机器人提供相应的服务。
使用太阳能为整个系统供电。
为了人类的安全并使设计更加完善,本设计还加入了防盗报警系统。
【Abstract】The paper introduces the design and fabrication of multifunction multi-legged robot of intelligent service based on the STM32 singlechip. Using STM32 as the control core, the multifunction robot is designed and manufactured by controlling the speech module, display module, illuminance sensor, smoke sensor, infrared remote control module and servo motor and so on. The robot can be controlled by the voice module, and the robot can be ordered to provide the corresponding service by observing the variables detected by the display screen module. Using solar energy to supply the whole system. In order to ensure the human security and perfect the design, this design also adds alarm system.【关键词】STM32单片机;传感器;多足机器人【Keywords】STM32 singlechip; sensor; multi-legged robot【中图分类号】TP242 【文献标志码】A 【文章编号】1673-1069(2018)06-0143-021 引言面对科技迅速发展的当今社会,所谓的高科技还未真正解决那些弱势群体的生活问题:空巢老人缺少子女的陪伴,日常生活需要有人照顾;盲人出行时需要靠外界传递导航信息等。
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计随着科技的不断发展,智能家居产品也越来越受人们的欢迎,扫地机器人作为智能家居产品的代表,已经成为了很多家庭的必备之物。
本文将基于STM32单片机设计一款扫地机器人。
我们需要选择合适的硬件平台。
STM32单片机是一种性能稳定、功耗低、容易学习的微控制器,非常适合用于控制扫地机器人。
我们可以选择STM32F407系列的单片机,其具有较大的存储容量和丰富的外设接口,可以满足扫地机器人的需求。
我们需要设计机器人的机械结构。
扫地机器人一般包括底盘、测距传感器、清扫装置等部分。
底盘一般由两个驱动电机驱动,可以选择直流无刷电机作为驱动源。
测距传感器可以选择红外线传感器或超声波传感器,用于检测周围环境。
清扫装置可以选择刷子或电动吸尘器等方式,用于清扫地面。
接下来,我们需要编写控制程序。
我们需要实现对驱动电机的控制。
通过控制电机的转速和方向,可以实现机器人的前进、后退、转向等动作。
我们需要使用传感器来检测机器人周围的环境。
根据传感器的测量数据,可以判断机器人是否遇到障碍物,并做出相应的反应。
我们需要设计自动充电功能,保证机器人在电量不足时能够自动返回充电桩进行充电。
为了简化开发过程,我们可以使用现有的开发工具和开源库。
如Keil MDK开发环境和STM32Cube库。
Keil MDK提供了强大的编译、调试和仿真功能,可以帮助我们快速开发程序。
STM32Cube库提供了丰富的驱动程序和示例代码,可以方便我们开发各种功能。
基于STM32单片机的扫地机器人设计是一个较为复杂的工程,需要考虑到硬件平台的选择、机械结构的设计以及控制程序的编写等方面。
但是通过充分利用现有的开发工具和开源库,我们可以快速实现一个功能完善的扫地机器人。
这将极大地方便人们的生活,提高家庭生活质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于STM的智能服务型多功能多足机器人
论文介绍了基于STM32单片机的智能服务型多功能多足机器人的设计和制作。
采用STM32作为控制核心,通过对语音模块、显示屏模块、光照度传感器、烟雾传感器、红外遥控模块以及伺服电机等的控制,设计制作多功能型机器人。
通过语音模块控制机器人的执行动作,也可通過观察显示屏模块显示检测的变量而命令机器人提供相应的服务。
使用太阳能为整个系统供电。
为了人类的安全并使设计更加完善,本设计还加入了防盗报警系统。
【Abstract】The paper introduces the design and fabrication of multifunction multi-legged robot of intelligent service based on the STM32 singlechip. Using STM32 as the control core,the multifunction robot is designed and manufactured by controlling the speech module,display module,illuminance sensor,smoke sensor,infrared remote control module and servo motor and so on. The robot can be controlled by the voice module,and the robot can be ordered to provide the corresponding service by observing the variables detected by the display screen module. Using solar energy to supply the whole system. In order to ensure the human security and perfect the design,this design also adds alarm system.
标签:STM32单片机;传感器;多足机器人
1 引言
面对科技迅速发展的当今社会,所谓的高科技还未真正解决那些弱势群体的生活问题:空巢老人缺少子女的陪伴,日常生活需要有人照顾;盲人出行时需要靠外界传递导航信息等。
考虑到这些细节,我们由此引发了设计理念:设计一款多功能的服务型多足机器人,在那些弱势人群需要帮助时及时做出相应的救援措施,以及陪伴他们的日常生活,做他们的贴身小管家。
此款机器人利用STM32单片机作为核心控制单元,结合多种传感器以及舵机实现它的多功能工作状态,在轻便小巧的外型下蕴涵多种智能服务模式。
服务型机器人可以根据人类的意愿来执行任务
如今空巢老人的生活问题已经非常严重,无人陪伴使得他们的安全极其令人担忧。
残障人士的生活不便,也成为人人担忧的社会问题。
此款机器人不但可以成为老人们忠实的伙伴,还可以依照他们的需求,做一些诸如打扫卫生、生活小提醒等服务,可以很好地满足他们生活中的需求;还可以在他们遇到危险时展开紧急救援;本设计安装了红外报警系统,保护了个人安全。
同时整个系统利用太阳能电池板作为能源提供装置,不仅可以实现整个系统的持续运转,更能起到节约能源以及绿色环保的作用。
2 总体设计
2.1系统方案分析
硬件方面采用STM32单片机作为控制器,芯片采用型号为STM32F103ZET6型芯片。
通过伺服电机、光照度传感器、语音模块、烟雾传感器等实现对机器人的控制,并且将需要的数据在TFT彩屏上显示。
程序设计开发使用常用的STM32系列开发软件Keil5。
使用2.8寸TFT彩屏显示有效数据。
整个软件划分为若干模块,分别调试,最后集成。
综合考虑此方案可行。
2.2 设计不足及解决方法
传统的8位51单片机没有足够的中断,处理能力也相对较差,无法驱动多个传感器。
为了达到设计需要,选择了32位的STM32F103ZET6单片机[1],但增加了开发成本。
在此次设计制作中完全可以使用成本较低、性能较差的STM32F103C8T6型芯片,更为廉价的也可以。
在为机器人提供动力方面,我们综合多个方面最终决定使用伺服电机,此电机价格昂贵,但我们经测试发现很适合机器人的结构,并便于拆装。
由于是购买的开发板,很多外设并没有实际作用,这在无形中就造成了浪费,不利于推广生产。
在之后的设计制作中应该注意这些问题,并且有效解决。
3 系统功能分析
3.1 主控芯片STM32F103ZET6介绍
开发板选择的是STM32F103ZET6作为MCU,该芯片是STM32F1系列里配置最强大的。
该芯片的配置也十分强悍,并且还带外部总线(FSMC)可以用来外扩SRAM和连接LCD等,通过FSMC驱动LCD,可以显著提高LCD 的刷屏速度[2]。
配置完全符合需求,可以实现多传感器多中断的综合控制。
3.2 太阳能供电系统
使用20W的家用小型太阳能发电系统,配合12V12AH的蓄电池,在正常情况下完全满足供电需求。
即使是在晚上或是阴雨天没有光照的情况下,系统也能通过蓄电池供电正常运转12个小时以上[3]。
这也是此设计制作的创新点之一,使整个系统实现了“0”碳排放,非常符合现在的节能减排需求。
3.3 语音控制模块
该模块主要由LD3320语音识别模块和STM32最小系统构成。
LD3320芯片是一款“语音识别”专用芯片,本芯片在设计上注重节能与高效,不需要外接任何的辅助芯片如Flash、RAM等,直接集成在现有的产品中即可以实现语音识别/声控/人机对话功能。