船舶操纵控制系统Matlab仿真
Matlab仿真在船舶航向自动控制系统中的研究与仿真

Matlab仿真在船舶航向自动控制系统中的研究与仿真陶小林
【期刊名称】《舰船科学技术》
【年(卷),期】2017()5X
【摘要】船舶的运动状态受到众多因素的影响,尤其是各种因素的叠加会对航向自动控制系统造成潜在的不稳定。
而这些不良因素一般很难在设计阶段就被发现,只有通过仿真软件,对各种影响因素进行仿真验证,才能够降低航向控制系统发生故障的概率。
本文主要采用Matlab软件对船舶的航向自动控制系统进行仿真与优化,并设计合适的PID控制策略,从多种角度对船舶的状态特性和运行稳态特性进行仿真,通过采用反馈校正算法,一定程度上提升了航向自动控制系统的精度。
【总页数】3页(P82-84)
【关键词】航向控制;反馈;PID
【作者】陶小林
【作者单位】黄河水利职业技术学院
【正文语种】中文
【中图分类】U664.82
【相关文献】
1.基于模糊理论的船舶航向控制仿真研究 [J], 陈磊;金超;吴开峰
2.恶劣海况下船舶航向控制仿真及应用研究 [J], 郭亦平;杜春旺;李明;王红波
3.基于广义预测控制的船舶航向控制仿真研究 [J], 范朗;张艳
4.船舶航向非线性控制系统仿真研究 [J], 徐益;老大中;李东海;宋跃进
5.非线性船舶航向自抗扰控制器的仿真研究 [J], 周柏清
因版权原因,仅展示原文概要,查看原文内容请购买。
控制系统MATLAB仿真实验指导书

1实验5. 控制理论仿真实验1 控制系统的建模一、实验目的1.学习在MATLAB 命令窗口建立系统模型的方法;2.学习如何在三种模型之间相互转换;3.学习如何用SIMULINK 仿真工具建模。
二、相关知识1.传递函数模型设连续系统的传递函数为:nn n n m m m m a s a s a s a b s b s b s b s den s num s G ++++++++==----11101110)()()( 设离散系统的传递函数为:n n n n m m m m a z a z a z a b z b z b z b z den z num z G ++++++++==----11101110)()()( 则在MATLAB 中,都可直接用分子/分母多项式系数构成的两个向量num 与den 构成的矢量组[num ,den ]表示系统,即num =],,,[10m b b b den =],,,[10n a a a建立控制系统的传递函数模型(对象)的函数为tf (),调用格式为:sys=tf (num ,den )sys=tf (num ,den ,Ts)sys=tf(othersys)sys=tf (num ,den )返回的变量sys 为连续系统的传递函数模型。
sys=tf (num ,den ,Ts)返回的变量sys 为离散系统的传递函数模型,Ts 为采样周期,当Ts=-1或Ts=[]时,系统的采样周期未定义。
sys=tf(othersys)将任意的控制系统对象转换成传递函数模型。
离散系统的传递函数的表达式还有一种表示为1-z 的形式(即DSP 形式),转换为DSP 形式的函数命令为filt(),调用格式为:sys=filt(num ,den )sys=filt(num ,den ,Ts)sys=filt(num ,den )函数用来建立一个采样时间未指定的DSP 形式传递函数。
sys=filt(num ,den ,Ts)函数用来建立一个采样时间为Ts 的DSP 形式传递函数。
基于Matlab的飞艇控制半物理实时仿真系统设计

基于Matlab的飞艇控制半物理实时仿真系统设计姜达郁;李中健【摘要】As the large airship inertia, long response times, low mobility, a method based on linear matrix inequality (LMI) technology was adopted to design the control law algorithm and to improve its mobility. In order to verify the performance of the airship control law, a semi-physical simulation platform was built on the basis of the XPC real-time simulation platform in Matlab, and the reflective memory network composed of the serial port and the reflected optic filler between the host/target and the flight control computer/ground station to achieve the information communication between the host/target and the flight control computer/ground stations. The real-time simulation results show that the system can intuitively and effectively verify the performance of various control law algorithms. It provides a useful reference for engineering applications of the flight control algorithms.%由于飞艇惯性大,响应时间长,机动性低,为了提高机动性,采用基于LMI线性矩阵不等式的方法设计控制律算法,为了验证飞艇控制律的性能,在Matlab的XPC实时仿真平台基础上,搭建半物理仿真平台,研究了宿主/目标机和飞控计算机及地面操作站之间通过串口和反射光纤组成的反射内存网实现宿主/目标机和飞控计算机及地面操作站之间的信息通讯.系统实时仿真的结果表明,该系统能直观有效地验证各种控制律算法的性能,为飞控算法移植到工程应用中提供了有益的参考.【期刊名称】《现代电子技术》【年(卷),期】2012(035)012【总页数】4页(P130-133)【关键词】LMI;无人飞艇;实时仿真;XPC【作者】姜达郁;李中健【作者单位】西北工业大学自动化学院,陕西西安 710129;西北工业大学自动化学院,陕西西安 710129【正文语种】中文【中图分类】TN911-340 引言由于飞艇耗能低、造价低、经济性好;可长时间悬停留空或浮空飞行,续航时间很长;具有垂直起降功能,无须占用跑道,机动性能好;可以大型化、载荷能力强;噪声小,隐身性好,安全性能好等因素,飞艇及其应用技术得到了突飞猛进的发展,同时对飞艇控制技术提出了更高要求[1]。
应用MATLAB控制系统仿真

01
根据系统性能要求,设计比例、积分、微分控制器参数,优化
系统性能。
状态反馈控制器设计
02
通过状态反馈控制器设计,实现系统的最优控制。
鲁棒控制器设计
03
针对不确定性系统,设计鲁棒控制器,提高系统对参数变化的
适应性。
04
控制系统仿真的动态行为,通过建立和求解微 分方程来模拟系统的动态响应。
性能等。
05
Matlab控制系统仿真实 例
一阶系统仿真
总结词:简单模拟
详细描述:一阶系统是最简 单的控制系统,其动态行为 可以用一个一阶微分方程描 述。在Matlab中,可以使用 `tf`函数创建一个一阶传递函 数模型,然后使用`step`函 数进行仿真。
总结词:性能分析
详细描述:通过仿真,可以 观察一阶系统的响应曲线, 包括超调和调节时间等性能 指标。使用Matlab的绘图功 能,可以直观地展示系统的 动态行为。
THANKS FOR WATCHING
感谢您的观看
适用于模拟数字控制系统、采样控制系统等。
实时仿真
01
在实际硬件上实时模拟控制系统的动态行为,通过将
控制算法嵌入到实际控制系统中进行实时仿真。
02
使用Matlab中的`real-time workshop`等工具箱进
行建模和仿真,可以方便地实现实时仿真。
03
适用于模拟实际控制系统、验证控制算法的正确性和
实时仿真
Matlab支持实时仿真,可以在实 际硬件上运行控制算法,进行系 统测试。
02
控制系统数学模型
线性时不变系统
线性时不变系统(LTI)是指系统的输出与输入之间的关系 可以用线性常数来描述的系统。在控制系统中,LTI系统是 最常见的系统类型之一。
《MATLAB与控制系统仿真》实验报告
《MATLAB与控制系统仿真》实验报告一、实验目的本实验旨在通过MATLAB软件进行控制系统的仿真,并通过仿真结果分析控制系统的性能。
二、实验器材1.计算机2.MATLAB软件三、实验内容1.搭建控制系统模型在MATLAB软件中,通过使用控制系统工具箱,我们可以搭建不同类型的控制系统模型。
本实验中我们选择了一个简单的比例控制系统模型。
2.设定输入信号我们需要为控制系统提供输入信号进行仿真。
在MATLAB中,我们可以使用信号工具箱来产生不同类型的信号。
本实验中,我们选择了一个阶跃信号作为输入信号。
3.运行仿真通过设置模型参数、输入信号以及仿真时间等相关参数后,我们可以运行仿真。
MATLAB会根据系统模型和输入信号产生输出信号,并显示在仿真界面上。
4.分析控制系统性能根据仿真结果,我们可以对控制系统的性能进行分析。
常见的性能指标包括系统的稳态误差、超调量、响应时间等。
四、实验步骤1. 打开MATLAB软件,并在命令窗口中输入“controlSystemDesigner”命令,打开控制系统工具箱。
2.在控制系统工具箱中选择比例控制器模型,并设置相应的增益参数。
3.在信号工具箱中选择阶跃信号,并设置相应的幅值和起始时间。
4.在仿真界面中设置仿真时间,并点击运行按钮,开始仿真。
5.根据仿真结果,分析控制系统的性能指标,并记录下相应的数值,并根据数值进行分析和讨论。
五、实验结果与分析根据运行仿真获得的结果,我们可以得到控制系统的输出信号曲线。
通过观察输出信号的稳态值、超调量、响应时间等性能指标,我们可以对控制系统的性能进行分析和评价。
六、实验总结通过本次实验,我们学习了如何使用MATLAB软件进行控制系统仿真,并提取控制系统的性能指标。
通过实验,我们可以更加直观地理解控制系统的工作原理,为控制系统设计和分析提供了重要的工具和思路。
七、实验心得通过本次实验,我深刻理解了控制系统仿真的重要性和必要性。
MATLAB软件提供了强大的仿真工具和功能,能够帮助我们更好地理解和分析控制系统的性能。
船舶拖航系统六自由度操纵运动仿真

船舶拖航系统六自由度操纵运动仿真船舶拖航系统六自由度操纵运动仿真船舶拖航系统是一种重要的海上运输设备,在海上货物运输中起到了非常关键的作用,而如何提高船舶拖航系统的操控能力是当前研究的热点。
船舶拖航系统的操纵运动仿真是一种非常有效的工具,可以模拟出各种不同的船舶拖航运动,对于提高系统的操纵能力具有重要意义。
船舶拖航系统的六自由度操纵运动是指在三个轴向分别进行平移和旋转的运动。
这六个自由度是:横向平移、纵向平移、垂直平移、绕X轴旋转、绕Y轴旋转和绕Z轴旋转。
在实际操作中,船舶拖航系统的操纵运动非常复杂,需要通过软件仿真来模拟出各种不同情况下的运动模式。
实现船舶拖航系统六自由度操纵运动仿真需要使用专业的仿真软件,如MATLAB/Simulink、ADAMS等。
这些软件具有良好的仿真性能和精度,可以精确地模拟出船舶拖航系统的各个运动指标。
以MATLAB/Simulink为例,其基于多体动力学理论,可以对船舶拖航系统进行六自由度动力学仿真,包括运动方程、力学方程和动力学方程等。
在进行船舶拖航系统六自由度操纵运动仿真时,需要考虑各种常见因素,并对其进行参数设置。
通常需要设置船舶的结构参数、物理参数、环境参数和控制参数等,以便精确地进行仿真分析。
其中结构参数包括船舶的长、宽、高等尺寸信息;物理参数包括船舶的质量、重心、惯性矩等;环境参数包括海洋水流、波浪等外部环境影响;控制参数包括船舶的操纵系统和控制策略等。
在仿真系统中,可以使用多种不同的仿真模式,如驱动模式、跟踪模式和预演模式等。
驱动模式是指在实际操纵情况下,通过对船舶各项指令进行控制,模拟出其对应的运动模式。
跟踪模式是指模拟出船舶跟随目标物体进行拖航操作的情况。
预演模式是指在不同环境条件下,模拟出船舶在某些特殊情况下的运动模式,以便用于系统优化和改进等方面。
总之,船舶拖航系统六自由度操纵运动仿真是一种非常重要的技术手段,对于提高船舶拖航系统的操纵能力具有重要意义。
基于MATLAB的船舶航向模糊自适应PID控制系统设计-董尚祺
请 作 依 者 法 -董 使 尚 用 祺 , 严
通过仿真测试可知,本文所设计的船舶航向模糊自适应 PID 控制系统,在控
制性能上具有很大的优势,能够满足船舶航行的需要。 关键词:船舶航向控制;模糊自适应;模糊控制;PID 控制
禁
传
I
阅
和 盗
版
Abstract
Ship course control system is one of the most crucial sections of the automatic control adaptive PID control system by using the classical PID control strategy base on the simulation.
禁
传
II
阅
和 盗
fuzzy control theory. The controllability of the system is tested and analyzed through the
版
systems of the ship. The main objective of this paper is to construct a ship course fuzzy
2.5 数学模型.................................................................................................. 11
2.6 构建 Simulink 模块..................................................................................13 2.7 本章小结................................................................................................... 13 3.1 PID 控制器简介........................................................................................14 3.1.1 比例控制....................................................................................... 14 3.1.2 积分控制....................................................................................... 14 3.1.3 微分控制....................................................................................... 15 3.2.1 PID 控制器的数学模型.................................................................15 3.2.2 比例、积分、微分参数............................................................... 16 3.2.3 PID 控制器仿真模型.....................................................................17
基于Modelica∕MWorks的舰船液压操舵系统建模与仿真
基于Modelica∕MWorks的舰船液压操舵系统建模与仿真舰船液压操舵系统是海洋船舶中非常重要的控制系统,它们负责将舵轮的运动转化为舵柄的旋转,从而改变船舶的方向。
为了保证船舶的运行稳定性和安全性,必须对其进行系统建模和仿真分析,以便在实际应用中发现并解决潜在问题。
本文将介绍使用Modelica∕MWorks进行舰船液压操舵系统建模和仿真分析的方法及结果。
首先,我们需要对舰船液压操舵系统进行建模。
该系统主要包括舵轮、舵链、齿轮、液压缸等多个部分。
在Modelica中,这些部分都可以被定义为一个个组件。
我们可以使用连接器将这些组件连接起来,形成完整的系统。
为了进一步简化模型,我们将使用代理组件来代替实际液压管道的建模,这样可以更方便地描述整个系统状态。
在建模过程中,我们需要确定每个组件的物理参数,例如模块的惯性、质量、弹性系数等。
这些参数通常是从船舶制造商提供的技术规格书和实验数据中获得的。
我们还需要定义控制算法和仿真参数,以便在仿真过程中模拟控制算法的交互。
接下来,我们可以使用Modelica的仿真工具MWorks来模拟系统的运行。
MWorks提供了与模型对应的仿真界面,方便用户控制仿真参数和查看模型输出结果。
在绘制结果时,我们可以添加曲线拟合和突变点检测等功能,对结果进行更深入的分析。
通过仿真结果,我们可以对舰船液压操舵系统的表现进行评估。
例如,我们可以检查系统响应时间是否足够快,是否存在过度振荡或不稳定性等问题。
如果在仿真过程中发现问题,我们可以通过调整组件参数或控制算法来改进系统性能,并通过重新仿真来测试改进效果。
总之,使用Modelic a∕MWorks进行舰船液压操舵系统建模和仿真分析是非常实用的方法,可以帮助我们发现潜在问题,并为实际应用提供指导。
在实际应用中,我们可以将该技术应用到各种不同类型的液压系统中,以支持基于仿真的设计优化。
为了更好地进行舰船液压操舵系统的建模和仿真分析,我们需要收集相关的数据,并进行分析。
如何使用Matlab进行控制系统仿真
如何使用Matlab进行控制系统仿真概述控制系统在工程领域中扮演着重要角色,它用于控制和管理各种工程过程和设备。
而控制系统仿真则是设计、开发和测试控制系统的关键环节之一。
Matlab作为一种功能强大的工程计算软件,提供了丰富的工具和功能,可以帮助工程师进行控制系统仿真。
本文将简要介绍如何使用Matlab进行控制系统仿真,以及一些实用的技巧和建议。
1. Matlab的基础知识在开始控制系统仿真之前,有一些Matlab的基础知识是必要的。
首先,了解Matlab的基本语法和命令,熟悉Matlab的工作环境和编辑器。
其次,学会使用Matlab的集成开发环境(IDE)进行编程和数学建模。
熟悉Matlab的常用函数和工具箱,并了解如何在Matlab中导入和导出数据。
2. 定义系统模型在进行控制系统仿真之前,需要定义系统的数学模型。
根据具体情况选择合适的建模方法,如传递函数、状态空间或差分方程等。
在Matlab中,可以使用tf、ss 或zpk等函数来创建系统模型,并指定系统的参数和输入信号。
此外,Matlab还提供了Simulink这一强大的图形化建模环境,方便用户以图形化界面设计系统模型。
3. 设计控制器控制系统仿真的关键是设计合适的控制器,以实现所需的控制目标。
Matlab提供了各种控制器设计方法和工具,如PID控制器、根轨迹法、频域方法等。
用户可以使用Matlab的Control System Toolbox来设计和分析控制器,并在仿真中进行验证。
此外,Matlab还支持自适应控制和模糊控制等高级控制方法,可根据具体需求选择合适的方法。
4. 进行仿真实验在完成系统模型和控制器设计后,可以开始进行控制系统仿真实验。
首先,确定仿真实验的输入信号,如阶跃信号、正弦信号或随机信号等。
然后,使用Matlab中的sim函数将输入信号应用到系统模型中,并观察系统的输出响应。
通过调整控制器参数或设计不同的控制器,分析系统的性能和稳定性,并优化控制器的设计。
MATLAB控制系统仿真实验模板新
MATLAB控制系统仿真实验模板新
建立一个MATLAB控制系统仿真实验模板,可以按照以下步骤进行:
1. 定义系统模型:定义系统的数学模型,包括传递函数、状态空间方程或差分方程等。
2. 设计控制器:根据系统模型和控制要求,设计控制器,可以是PID控制器、模糊控制器、最优控制器等。
3. 选择仿真工具:选择MATLAB的Simulink仿真工具,可以通过拖拽元件和连接线的方式构建仿真模型。
4. 进行仿真实验:设置仿真参数,运行仿真实验,观察系统的动态响应和稳态性能。
5. 分析仿真结果:根据仿真结果,评价系统的控制效果,优化控制器设计或系统参数调整。
6. 输出实验报告:根据实验结果,输出实验报告,包括系统模型、控制器设计、仿真结果分析和结论等。
在创建模板时,可以使用MATLAB的模板功能,在文件-新建-模板选项中选择Simulink模板,然后选择控制系统仿真实验模板。
输入模板名称后保存即可。
使用模板时,可以根据具体实验要求修改系统模型、控制器、仿真参数等,以完成具体实验内容。
基于matlab的舰船横摇、纵摇仿真程序
clear;%%%%%船舶设计参数.L=56.5; %船长L(m)B=10.4; %船宽B(m)d=3.1; %吃水d(m)D=1323.2; %排水D(m)Cw=0.686; %设计水线面积系数Cb=0.559; %方形系数%%%%%船舶横摇参数.g=9.8; %重力加速度gc=0.35; %计算横摇惯性半径系数Lou=c*B; %横摇惯性半径(m)Jt=D/g*Lou^2; %横摇总转动惯量Jθ+△JθdJt=0.25*Jt; %横摇附加转动惯量△Jθ(kg*m*s^2)h=0.94; %横稳性中心高 h(m)wt=(D*h/Jt)^1/2; %横摇固有角频率ωθmt=0.16/2; %横摇阻尼因子μθ%%%%%船舶纵摇参数.Jf=0.07*D/g*Cw*L^2; %纵摇总转动惯量JφdJf=Jf; %纵摇附加转动惯量△JφR=(Cw*L)^2/(14*Cb*d);%纵稳心半径(m)H=R; %纵稳性中心高(m)wf=(D*H/(Jf+dJf))^1/2;%纵摇固有角频率ωφmf=0.36; %纵摇阻尼因子μφ%%%%%随机海浪参数.1Ut=11; %风速(m/s)(22Kn)Lm=128; %海浪波长(m)h1=3.3; %有义波高(m)T=8.6; %波浪固有周期(s)PI=3.1415926;w=2*PI/T; %波圆频率ωv=Lm/T; %波相速度(m/s)k=2*PI/Lm; %波数hw=0.17*Lm^(3/4); %波高(m)waveA=hw/2; %波幅(m)Xt=exp(-k*d/2); %有限吃水修正系数XθtXb=1-sqrt(Cw)*(B/Lm)^2;%有限船宽修正系数Xθbx=Xt*Xb; %波倾修正系数Xθa0=k*waveA; %最大波倾角a0ae0=x*a0; %最大有效波倾角ae0%%%%%随机海浪的波倾角仿真.beta=PI/6; %遭遇波倾角β(浪向角)V=5; %船舶航速V(m/s)dw=0.08; %仿真频率增量△ωwi=0.24:0.08:2.4; %各仿真点频率a=0.779; %海浪谱系数Ab=3.116/h1^2; %海浪谱系数Bfor i=1:28we(i)=wi(i)-wi(i)^2/g*V*cos(beta);%各仿真点遭遇频率ωe2Swi(i)=a/wi(i)^5*exp(-b/wi(i)^4); %单参数海浪谱S(ω) Sawi(i)=wi(i)^4/g^2*Swi(i); %波倾角能量谱密度Sa(ω)Sadw(i)=sqrt(2*Sawi(i)*dw);endMinT=0; %仿真采样的最小时间MaxT=MinT+600; %仿真采样的最大时间t=MinT:0.2:MaxT; %时间t(s)at=0; %横摇波倾角af=0; %纵摇波倾角for i=1:28e(i)=rand; %产生随机数εiat=at+(Sadw(i)*(cos(we(i)*t+e(i))))*sin(beta);af=af+(Sadw(i)*(cos(we(i)*t+e(i))))*cos(beta);end%%%%%船舶横摇模型求解.%状态方程:[DX1;DX2]=[0 1;-a2 -a1]*[X1;X2]+[b1;b2]*u,即;X'=AX+BU%输出方程;y=[1 0]*[X1;X2],即:Y=CX+DU%X1,X2为状态变量,输入信号 u=a(t),输出信号y=θa1t=2*mt*wt;a2t=wt^2;b0t=wt^2*dJt/(D*h);3b1t=a1t*(1-b0t);b2t=wt^2-a1t^2*(1-b0t)-wt^2*b0t;AAt=[0 1;-a2t -a1t];BBt=[b1t;b2t];CCt=[1 0];DDt=b0t;[Yt,Xt]=lsim(AAt,BBt,CCt,DDt,at,t);%得到船舶摇荡的横摇角信号%%%%%船舶纵摇模型a1f=2*mf*wf;a2f=wf^2;b0f=wf^2*dJf/(D*H);b1f=a1f*(1-b0f);b2f=wf^2-a1f^2*(1-b0f)-wf^2*b0f;AAf=[0 1;-a2f -a1f];BBf=[b1f;b2f];CCf=[1 0];DDf=b0f;[Yf,Xf]=lsim(AAf,BBf,CCf,DDf,af,t);%得到船舶摇荡的纵摇角信号%%%%%船舶横摇角.纵摇角仿真曲线figure(1)plot(t,Yt,'-r',t,0)xlabel('时间(秒)','FontWeight','bold')ylabel('船舶横摇角','FontWeight','bold')4grid onfigure(2)plot(t,Yf,'-k',t,0)xlabel('时间(秒)','FontWeight','bold')ylabel('船舶纵摇角','FontWeight','bold')grid on5。
船舶自动化控制系统的设计与模拟仿真
船舶自动化控制系统的设计与模拟仿真随着技术的不断发展,船舶自动化控制系统的发展也越来越成熟。
船舶自动化控制系统包括了许多重要的部件和子系统,例如温度传感器、液位传感器、自动阀门和控制面板等。
这些部件的整合在一起,构成了一个完整的系统,使得船舶在操作中更加自动化和高效。
在船舶的操作过程中,如果能够利用自动控制技术,可以大大提高生产效率,降低劳动力成本,提高船舶的安全和可靠性。
船舶自动化控制系统主要由以下几个方面组成:一、传感器和测量部分传感器和测量部分是船舶自动化控制系统的核心部分之一,主要目的是实时采集和测量相关物理量。
船舶的运行需要监测许多参数,例如船舶的速度、位置、燃油供应等,这些参数在船舶操作中是非常重要的。
因此,传感器和测量部件需要极度精确和可靠,才能够确保船舶操作的有效性和安全性。
二、控制器和执行器控制器和执行器是船舶自动化控制系统中的另一个重要部分,主要目的是实现船舶自动化控制系统的自动化操作。
控制器可以根据传感器和测量部分获取的数据,对船舶做出正确的决策和控制,例如调整船舶的速度、方向和航线等。
执行器是执行控制器命令的部分,例如调整船舶的舵和油门等,主要目的是实现船舶的正确航行和操作。
三、通信和处理器船舶自动化控制系统中的通信和处理器部分非常重要,主要目的是实现船舶控制系统之间的通信和处理船舶操作相关的数据。
现在很多的船舶自动化控制系统已经采用了分布式的网络架构,因此通信和处理器部分需要具备高可靠性和高伸缩性,以便满足不同船舶的需求。
船舶自动化控制系统还需要对其进行建模和仿真,以检验和改进其性能。
建模和仿真是船舶自动化控制系统设计和开发过程中非常重要的一步,可以使系统设计者更好地了解系统的性能和功能,并在不同操作条件下进行测试和检验,发现和解决潜在问题。
下面将介绍船舶自动化控制系统的建模和仿真过程。
一、建模船舶自动化控制系统建模主要分为两个方面:系统物理模型和系统控制模型。
系统物理模型是将船舶自动化控制系统中各个物理部件进行建模,包括不同部件的位置、形状、功率和负载等参数。
控制系统的MATLAB计算及仿真
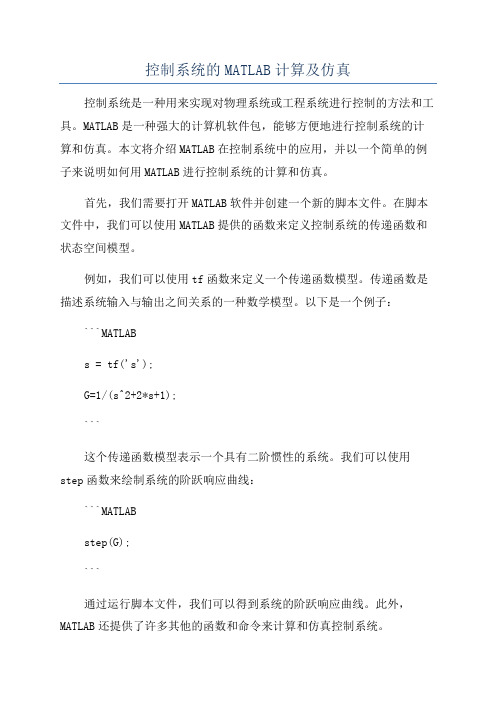
控制系统的MATLAB计算及仿真控制系统是一种用来实现对物理系统或工程系统进行控制的方法和工具。
MATLAB是一种强大的计算机软件包,能够方便地进行控制系统的计算和仿真。
本文将介绍MATLAB在控制系统中的应用,并以一个简单的例子来说明如何用MATLAB进行控制系统的计算和仿真。
首先,我们需要打开MATLAB软件并创建一个新的脚本文件。
在脚本文件中,我们可以使用MATLAB提供的函数来定义控制系统的传递函数和状态空间模型。
例如,我们可以使用tf函数来定义一个传递函数模型。
传递函数是描述系统输入与输出之间关系的一种数学模型。
以下是一个例子:```MATLABs = tf('s');G=1/(s^2+2*s+1);```这个传递函数模型表示一个具有二阶惯性的系统。
我们可以使用step函数来绘制系统的阶跃响应曲线:```MATLABstep(G);```通过运行脚本文件,我们可以得到系统的阶跃响应曲线。
此外,MATLAB还提供了许多其他的函数和命令来计算和仿真控制系统。
另外,我们还可以使用stateSpace函数来定义一个状态空间模型。
状态空间模型是控制系统中另一种常用的数学模型。
以下是一个例子:```MATLABA=[01;-1-1];B=[0;1];C=[10];D=0;sys = ss(A, B, C, D);```这个状态空间模型描述了一个二阶系统的状态方程和输出方程。
我们可以使用step函数来绘制系统的阶跃响应曲线:```MATLABstep(sys);```通过运行脚本文件,我们可以得到系统的阶跃响应曲线。
除了step函数外,MATLAB还提供了许多其他的函数和命令来计算和仿真状态空间模型。
在控制系统中,还常常需要对系统进行参数调节和性能优化。
MATLAB提供了一系列的控制系统工具箱,用于进行控制系统的分析和设计。
例如,Control System Toolbox提供了用于线性系统分析和设计的工具。
船舶航速控制的MATLAB仿真
堕 ≤ ≤堕 +
n n qn
种原因和条件限制而无法实现的试验 和试航 , 具有
低耗 高效 这一 突 出 的特 点 , 迅 速 推 广应 用 到 舰 船 被 领域 的各 个方 面 , 舰 船技术 得 到较 大发展 。 使 船 舶航 速 的变 化 , 根结 底 是船 舶 主机 的转 速 归
维普资讯
筇2 3卷 第 4期 20 0 6年 0 8月
江 苏船 舶
JANG U S P I S HI
Vo . 3 No 4 12 . Au 20 6 g. 0
船 舶 航 速 控 制 的 MA L B 仿 真 T A
吴 杰 刘 西 全
则柴油机齿条位置到柴油机转速的传递函数 G () 。s
可 用如 下框 图表示 :
1 柴 油 机 调速 系统模 型 建 立
1 1 柴油 机模 型 建立 .
当外 界负 荷变 化时 , 油机 平衡 工况 被破坏 , 柴 若
维 持柴 油机转 速 不 变 , 柴 油机 调 速 器 就 会根 据 外 则
由于滞 后 时间 很小 , 而对 于转 速控 制 , 制 若控
周期选 择较 大 , >4 m , e 完 全可 以以一 次式 如  ̄ 0 s则 一
界 负荷 的大 小 , 当调 整喷 油泵 齿条 位置 , 适 从而 引起 循 环喷 油量 的变 化 , 而 引起 柴 油机 输 出扭矩 的变 进 化, 以保 证 柴油 机 转 速恒 定 。喷 油 泵 的齿 条 位 置改
式 中 : 为齿 条 位 置 到输 出扭 矩 的 比例 系数 , K 随发 动机 工况 而 变 ; 为柴 油 机扭 矩 滞后 时 间常 数 ; R为 齿条 位置 ; 为 柴油机 输 出扭矩 。 主要取 决 于柴 油机 的转 速 、 缸数 及 冲程数 , 气
基于MATLAB的船舶运动控制实时仿真研究
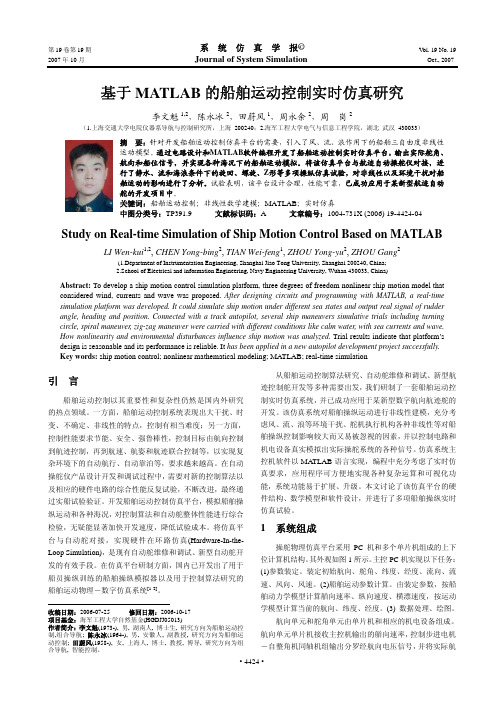
式中,δ 为舵角,[XA YA NA] 为风力, [ X W 力,其余参数均为水动力系数。
YW
NW ] 为浪
2.2 考虑海流的运动学模型
图 1 船舶操舵控制综合仿真系统
考虑恒值海流,船舶运动学方程写为:
Abstract: To develop a ship motion control simulation platform, three degrees of freedom nonlinear ship motion model that considered wind, currents and wave was proposed. After designing circuits and programming with MATLAB, a real-time simulation platform was developed. It could simulate ship motion under different sea states and output real signal of rudder angle, heading and position. Connected with a track autopilot, several ship maneuvers simulative trials including turning circle, spiral maneuver, zig-zag maneuver were carried with different conditions like calm water, with sea currents and wave. How nonlinearity and environmental disturbances influence ship motion was analyzed. Trial results indicate that platform’s design is seasonable and its performance is reliable. It has been applied in a new autopilot development project successfully. Key words: ship motion control; nonlinear mathematical modeling; MATLAB; real-time simulation
基于MATLAB的船舶航向模糊自适应PID控制系统设计-答辩展示-董尚祺

模糊控制 算法
U
反模 糊化
u
被控 对象
董尚祺
3. 模糊控制
董尚祺
3. 模糊控制
航向偏差e各模糊子集 及其隶属函数
航向偏差率Ec各模糊子集 及其隶属函数
控制舵令U各模糊子集 及其隶属函数
董尚祺
3. 模糊控制
控制舵令u控制规则表
U Ec
NB NB NB NB NB NM NS ZO
E
NB NM NS Z PS PM PB
基于Matlab的船舶航向模糊自适应PID控制系统设计 船舶航向 控制系统
目的
Matlab
工具
方法一
PID控制
参数固定,无 法根据工况进 行实时调整。
课题解析
模糊自适应 PID控制
取长补短,将二 者完美结合。
方法三
方法二
模糊控制
输出离散形式,很难 跟踪连续信号。
董尚祺
目
1
船舶航向控制理论基础
录
2
积分环节的积分饱和作用,会使 得系统出现较大的超调。本文在 参数自整定PID控制器的设计时 ,将积分系数设置为0,使其完 全由模糊控制器根据系统的具体 状态在线实时调节,既可减小系 统超调,又可缩短系统的调节时 间。
积分
对比
PID
本文并不止于最终所设计的F_PID 系统的成功运行,大胆的将其与之 前所设计的PID系统和FC系统进行 对比。在动态特性、静态特性和抗 干扰性能方面,做了全方位深入的 对比分析。结合响应曲线和性能指 标数据,充分说明船舶航向模糊自 适应控制系统,在控制性能上所具 有的绝对优势。
90°阶跃指令下的FC系统响应曲线
董尚祺
4. 模糊自适应PID控制
船舶操纵控制系统Matlab仿真

图1.9
K2 = 1000时的根轨迹
改进系统稳定性判断
再次设法进一步增加 K 2 。 ③ K2 5000 这个速度反馈增益产生的开环极点:
s0 s -0.024
s -0.054 0.070 j
(1-12)
相对应的极点和根轨迹如图 1.10所示。这就给出了到目前为止最满 意的效果,因为全部根轨迹看起来似乎都在调节时间约束左边。
图1.6 性能分界线
改进后的系统模型
引入一个新增的开环零点,可以使得根轨迹相对于复平面坐标,大 致上向左推移,这样就有可能使得系统最终达到稳定状态。这可以通过 ①用一个PD控制器来实现;②用一个速度反馈来实现。本文将详细介绍 方法②,并假设 可以由一个速度陀螺仪测得。现在所提议的系统如图1.7 所示,其中设计目标将通过正确选择 K1 和 K 2 来达到。
图1.7 修改后的控制系统
我们从内环(速度环)的闭环传递函数开始,将用G 来表示,即
*
G
0.05K (1 T3 s ) (1 TG s )(1 T1s )(1 T2 s ) 0.05KK 2 (1 T3 s )
(1-6)
改进后的系统模型
由于H(s)=1,则外环系统的开环传递函数变为
(1-14)
再次仿真闭环响应,其结果如图1.12所示,该响应的确满足了两项 性能指标,而且对比这两个增益可看出, K1 84.5 响应更快,满足了调节 时间要求。因此,最终选取 K1 84.5 和 K2 5000 将使得系统达到期望 的性能指标要求。
图1.12
K1 = 84.5 时的阶跃响应
(1-2)
初始系统稳定性判断
判断系统稳定性:一种零极点法,若系统的零极点处于左半 S平面,那么 该系统就是稳定的;另一种根轨迹法,若根轨迹曲线处于左半 S平面,那么该 系统就是稳定的。比较两种方法,根轨迹法能更好地获取系统的稳定性趋势, 以及和其他动态性能指标作比较。图1.5表示系统的根轨迹图,从中可以看出, 系统存在一个正的极点(0.00041),而由此引发的根轨迹处于右半 S平面,由 此可得该系统是不稳定的。
利用MATLAB SIMULINK进行船-泵-机匹配仿真

Ma t c h i n g Of S h i p - - Wa t e r j e t - - E n g i n e B y U s i n g Ma t l a b S i mu l i n k
C HE N Wa n h o n g ,MAO F u k a o ,HE Qi n s h a n
泵一 机 匹 水 流的反作 用力来 获得 ,并通 过操纵 及导航设 备 改变 航 速和推力 一功率 一航速 特性 曲线 ,因此船 一 喷 流方 向来 实现 对船舶 的操纵 。喷水 推进具 有抗 空泡 配设 计及研 究在 国内还是一个 较为 陌生 的领域 。本文 A T L A B S I M U L I N K 软件进 能力 强 、附体阻 力小 、噪音低 、传 动机构 简单 、适 应 利用 喷水 推进泵理论 ,借 助M 船一 泵一 机 ”匹配工作模 式仿 真 ,为喷水推 进泵选 变 工况能 力强 、船舶操 纵性能佳 等特 点 ,尤 其在 浅吃 行 “
D e s i g n&r e s e a r c h设计与研究
利用MA T L A B S I MU L I N K 进行船 一 泵一 机 匹配仿 真
陈万 宏 ,毛福 考 ,何秦 珊
( 广州船舶及海洋工程设计研究院,广州 5 1 0 2 5 0 )
摘 要 :本 文根据船舶阻力和选定的主机功率 、转速及初步布置 ,利用 喷水推进理论 ,借助M A T L A B S I M U L I N K 仿真软件建立 “ 船一 泵一 机” 匹配 的仿真模 型,并进行仿真计算。将其与C F D 仿真计算 的结果进行 比 较 ,结果 表 明该 仿 真 方法 能较好 的解 决 “ 船一 泵一 机 ” 匹配 问题 。 关 键 词 :M A T L A B S I M U L I N K ;船一 泵一 机 匹配 ; 喷水 推进 中 图分 类 号 :U6 6 4 . 3 4 文 献 标 识 码 :A
基于船舶运动控制的Matlab仿真

基于船舶运动控制的Matlab仿真
邹蔚龙;彭侠夫;叶和龙
【期刊名称】《计算机技术与发展》
【年(卷),期】2008(018)002
【摘要】在分析随机海浪的波能谱和船舶的受力情况的基础上,建立随机海浪模型和船舶运动模型.用PID控制方法实现减摇鳍的控制,并用Matlab软件对海浪的波倾角和船舶的横摇角进行仿真.通过比较仿真结果发现,PID控制减摇鳍能使船舶减摇达90%以上.结果表明,该方法可以很好地用于随机海浪作用下的船舶横摇减摇预报.
【总页数】4页(P184-186,190)
【作者】邹蔚龙;彭侠夫;叶和龙
【作者单位】厦门大学信息科学与技术学院自动化系,福建,厦门,361005;厦门大学信息科学与技术学院自动化系,福建,厦门,361005;厦门大学信息科学与技术学院自动化系,福建,厦门,361005
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于MATLAB的船舶运动控制算法研究 [J], 黄学钿;邢延
2.基于串级PID的船舶运动控制系统的设计 [J], 冯晓波;韩佳颖;董博通
3.基于串级PID的船舶运动控制系统的设计 [J], 冯晓波;韩佳颖;董博通
4.基于闭环增益成形算法和神经网络算法的船舶运动控制器设计 [J], 刘杰
5.基于神经网络的自适应PID船舶运动控制器研究 [J], 李欣;孙珊珊
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
改进后的系统模型
引入一个新增的开环零点,可以使得根轨迹相对于复平面坐标,大 致上向左推移,这样就有可能使得系统最终达到稳定状态。这可以通过 ①用一个PD控制器来实现;②用一个速度反馈来实现。本文将详细介绍 方法②,并假设 可以由一个速度陀螺仪测得。现在所提议的系统如图1.7 所示,其中设计目标将通过正确选择 K1 和 K 2 来达到。
0.05KK1 (1 T3 s) K1G GH ( s) 1 s s[(1 TG s)(1 T1s)(1 T2 s) 0.05KK 2 (1 T3 s)]
(1-7)
代入数值并展开得出
GH ( s)
0.0237 K1 (1 35.69s) 638046s 4 84653s 3 s 2 (2411 0.846 K 2 ) s(0.024 K 2 1)
与条件1对应的阻尼比ζ由 间可由下式求出:
p e
/ 1 2
100%
得出:ζ 275s v 17.28 4 4 又由条件2得调节时间为 ts
n
(1-4)
所以可以求出
0.014
(1-5)
这两项性能指标可以通过分界 线在复平面上表示出来,如图1.6所 示。具有图1.5所示根轨迹的问题中 有三条趋于无穷远处的渐近线,并 且对于任意增益时将总是不稳定的。
图1.7 修改后的控制系统
我们从内环(速度环)的闭环传递函数开始,将用G 来表示,即
*
G
0.05K (1 T3 s ) (1 TG s )(1 T1s )(1 T2 s ) 0.05KK 2 (1 T3 s )
(1-6)
改进后的系统模型
由于H(s)=1,则外环系统的开环传递函数变为
图1.5 操纵系统的根轨迹
众所周知,大多数大型船舶的航向是不稳定的,因此,我们必须设法设计 一个更好的控制器,它不仅能稳定操纵系统,而且还能达到以下性能参数: ⑴船在方向舵偏转角产生阶跃变化时超调量不会超过5%; ⑵相同输入作用下2%的调节时间应该发生在以设计速度通过 5个船长所用 的时间内。
改进后的系统模型
图1.3 操舵装置传递函数
初始的系统模型
因此,构建一个简单的闭环控制系统,如图1.4所示。该系统包括: 控制器环节、操舵装置环节、船舶动力学环节、积分环节以及指南针测 量环节。
图1.4 初始的操纵系统
初始的系统模型
考虑一艘中型油船的典型数据为,950ft(1ft=0.3048m)长,重150 000 重 量 吨 ( 体 积 小 于 1.1328m3 的 1 公 吨 货 物 称 1 重 量 吨 ) , 并 以 10.24kn. (17.28ft/s)的速度航行,我们有
图1.10
K2 = 5000时的根轨迹
改进系统的仿真结果
重述一下速度内环控制系统的初始条件:
T1 23.71s T2 -2446.4s
T3 35.69s
K 0.474s 1 TG 11s
接着,通过选取不同的K1值(K1 =50, K1 =84.5),来仿真验证 确定系统最终的各项参数,而PD控制的各项仿真参数在后续中给出。 我们将在轨迹上选取一个点,估算出增益,然后仿真出单位阶 跃作用下的闭环响应。假设我们选取的增益 K1 50 ,与之对应的 闭环极点为 s -0.05 0.066 j (1-13) s -0.0165 s -0.0165
图1.8
K2 = 500时的根轨迹
改进系统稳定性判断
尝试增加 K 2 值。 ② K 2 1000 再次求解分母中的多项式,得出开环极点:
s0 s -0.0091
s -0.062 0.012 j
(1-11)
画出开环极点,并大致画出根轨迹,其结果如图 1.9所示。这样就 比较好,因为来自原点附近的两个极点的分支环绕零点并且最终会移动 到性能边界线的左边。唯一的缺点是,它要取一个较高的增益来实现其 要求,到时复开环极点的分支可能是欠阻尼的或者是不稳定的。
%图1:零极点 %图2:根轨迹
MATLAB编程设计
初始系统的稳定性判断得出的零极点图和根轨迹图
z 0.028
p1 0.091 p2 0.042 p3 0 p4 0.00041
零极点图
根轨迹图
MATLAB编程设计
调整 K 2 的参数来改进系统的稳定性
T1=23.71; T2=-2446.4; T3=35.69; K=0.474; TG=11; %参数赋值 % K2的取值:K2=500,1000,5000; num=-0.05*K*[T3 1]; den=conv([TG 1],conv([T1 1],[T2 1]))-0.05*K*K2*[0 0 T3 1]; G1=tf(num,den); %速度环的闭环传递函数 GH=series(G1,tf([1],[1 0])); %将速度环与积分环节串联 之后的系统开环传递函数 figure(1); pzmap(GH); %图1:零极点 figure(2); rlocus(GH); %图2:根轨迹
MATLAB编程设计
调整 K 2 的参数来改进系统的稳定性
K 2 500 K 2 1000
K 2 5000
MATLAB编程设计
调节 K1 的值来改进系统的响应速度 T1=23.71; T2=-2446.4; T3=35.69; K=0.474; TG=11; %参数赋值 K2=5000; %最终系统的K2=5000 num=-0.05*K*[T3 1]; den=conv([TG 1],conv([T1 1],[T2 1]))-0.05*K*K2*[0 0 T3 1]; G1=tf(num,den); %速度环的闭环传递函数 figure(1); subplot(2,1,1); %图1中的上图:K1=50.0时的系统阶跃响应图 K1=50.0; t1=0:1:500; GH1=series(K1*G1,tf([1],[1 0])); %整个系统的开环传递函数 G2=feedback(GH1,1,-1); %整个系统的闭环传递函数 plot(step(G2,t1));grid %画出G2传递函数对应的阶跃响应 xlabel('时间/s');ylabel('幅值');title('当K1=50.0时的阶跃响应');
明显地,速度内环控制系统( K1 = 84.5 和K2 = 5000 ) 的阶跃响应更加优越。
MATLAB编程设计
初始系统的稳定性判断:
T1=23.71; T2=-2446.4; T3=35.69; K=0.474; TG=11; %参数赋值 num1=[0.05]; den1=[TG 1]; G1=tf(num1,den1); %操舵装置环节的传递函数 num2=-K*[T3 1]; den2=conv([T1 1],[T2 1]); G2=tf(num2,den2); %船舶动力学环节的传递函数 G3=tf([1],[1 0]); %积分环节的传递函数 GH=series(G1,series(G2,G3)); %将三个环节串联之后的传递函数 figure(1); pzmap(GH); figure(2); rlocus(GH);
(1-14)
再次仿真闭环响应,其结果如图1.12所示,该响应的确满足了两项 性能指标,而且对比这两个增益可看出, K1 84.5 响应更快,满足了调节 时间要求。因此,最终选取 K1 84.5 和 K2 5000 将使得系统达到期望 的性能指标要求。
图1.12
K1 = 84.5 时的阶跃响应
改进系统稳定性判断
首先,我们猜测 K 2 的值并且研究完整的开环系统产生的根轨迹。 ① K 2 500 这种情况下分母因式分解成如下开环极点: s=0 s = -0.0045 s = -0.048 s = -0.08
(1-10)
这些极点和开环零点画在图 1.8 中,图中还标出了性能分界线和 生成根轨迹。显然,此根轨迹是不能令人满意的,因为在虚轴附近的 两个闭环极点总会超出调节时间的性能边界范围。
(1-8)
我们将用根轨迹来设计系统,但是直到估计出 K 2值我们才能配置开环 极点。更进一步地,因为必须将上述表达式的分母因式分解成(s 1 )(s 2 ) 4 的形式,所以 s 项的乘子必须为1,因此将上述传递函数分子分母同除以 它的的系数得
1.325 10-5 K1 ( s 0.0280) GH ( s) 4 (1-9) s 0.1327 s 3 s 2 [(2411 0.846 K 2 ) / 638046] s[(0.024 K 2 1) / 638046]
仿真闭环阶跃响应时,得到的结果如图 1.11所示。观察阶跃响 应曲线,可看出此时该系统未达到调节时间小于275s的要求。
图1.11
K1 = 50时的阶跃响应
改进系统的仿真结果
增大增益,以使响应更快。 选取的增益 K1 84.5 ,与之对应的闭环极点为
s -0.02 0.010 j s -0.06 0.064 j
经过全体组员讨论分析,最终合作完成该课程设计,具体分配任务如下
编程仿真
朱海洋
PPT制作
PPT演讲
徐成刚、高斌、田文、唐渊、梁凇
高斌
船舶操纵控制系统
设计一个船舶操纵控制系统,该系统是一个只适用于二维运动的自动驾驶 仪。其中,输入量:方向舵顺时针偏转角 δ ;输出量:船身逆时针旋转角 ψ (固定基准方向为正北方),如图1.1所示。
初始的系统模型
δ与ψ之间的关系由所指的Nomoto方程得出,可以表示为
- K (1 T3 s) (1 T1s)(1 T2 s)
(1-1)
其中:固定的δ产生一个固定的旋转角速率 ;因为在具有标准方向 舵几何结构的船中,方向舵顺时针方向的旋转会使船产生一个逆时针方 向的旋转,所以在传递函数中出现一个负号。 我们也可以把操舵装置的模 型建为一个简单滞后环节,如图 1.3所示,其中θ是导致方向舵旋转 δ 的舵轮旋转角。