无人机串口实验
串口实验实验报告

串口实验实验报告串口实验报告一、引言串口是一种常见的数据传输接口,广泛应用于电子设备之间的数据通信。
本次实验旨在通过串口通信实验,深入了解串口的工作原理和使用方法,并实现简单的数据传输。
二、实验目的1. 理解串口通信的基本原理;2. 掌握串口通信的硬件连接方式;3. 学会使用串口通信协议进行数据传输;4. 实现简单的串口通信程序。
三、实验器材1. 一台个人电脑;2. 一块开发板;3. 一条串口数据线。
四、实验步骤1. 将开发板与个人电脑通过串口数据线连接起来;2. 打开串口通信软件,并进行相应的设置;3. 在开发板上编写程序,实现数据的发送和接收;4. 在个人电脑上编写程序,实现数据的接收和显示;5. 进行数据传输实验,观察数据是否能正常传输。
五、实验结果与分析经过实验,我们成功地实现了串口通信,并能够正常地进行数据传输。
通过观察数据接收端的显示,我们可以清晰地看到发送端发送的数据被准确地接收并显示出来。
这说明我们的串口通信实验是成功的。
六、实验总结通过本次实验,我们深入了解了串口通信的原理和使用方法,并成功地实现了串口通信的数据传输。
串口通信在电子设备之间的数据传输中有着广泛的应用,掌握串口通信技术对于我们的学习和工作都具有重要的意义。
七、参考文献[1] XXXX. 串口通信原理与应用[M]. 电子工业出版社, 2010.八、致谢感谢实验中给予我们帮助和指导的老师和同学们,没有你们的支持,我们无法顺利完成本次实验。
九、附录实验中使用的程序代码如下:发送端代码:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <Windows.h>int main(){HANDLE hSerial;DCB dcbSerialParams = { 0 };COMMTIMEOUTS timeouts = { 0 };// 打开串口hSerial = CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);if (hSerial == INVALID_HANDLE_VALUE){printf("无法打开串口\n");return 1;}// 配置串口参数dcbSerialParams.DCBlength = sizeof(dcbSerialParams);if (!GetCommState(hSerial, &dcbSerialParams)) {printf("无法获取串口参数\n");return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;if (!SetCommState(hSerial, &dcbSerialParams)) {printf("无法设置串口参数\n");return 1;}// 设置串口超时时间timeouts.ReadIntervalTimeout = 50;timeouts.ReadTotalTimeoutConstant = 50;timeouts.ReadTotalTimeoutMultiplier = 10;timeouts.WriteTotalTimeoutConstant = 50;timeouts.WriteTotalTimeoutMultiplier = 10;if (!SetCommTimeouts(hSerial, &timeouts)){printf("无法设置串口超时时间\n");return 1;}// 发送数据char data[] = "Hello, Serial!";DWORD bytesWritten;if (!WriteFile(hSerial, data, strlen(data), &bytesWritten, NULL)){printf("无法发送数据\n");return 1;}// 关闭串口CloseHandle(hSerial);return 0;}```接收端代码:```c#include <stdio.h>#include <stdlib.h>#include <string.h>#include <Windows.h>int main(){HANDLE hSerial;DCB dcbSerialParams = { 0 };COMMTIMEOUTS timeouts = { 0 };// 打开串口hSerial = CreateFile("COM1", GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);if (hSerial == INVALID_HANDLE_VALUE){printf("无法打开串口\n");return 1;}// 配置串口参数dcbSerialParams.DCBlength = sizeof(dcbSerialParams);if (!GetCommState(hSerial, &dcbSerialParams)){printf("无法获取串口参数\n");return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;if (!SetCommState(hSerial, &dcbSerialParams)) {printf("无法设置串口参数\n");return 1;}// 设置串口超时时间timeouts.ReadIntervalTimeout = 50;timeouts.ReadTotalTimeoutConstant = 50;timeouts.ReadTotalTimeoutMultiplier = 10;timeouts.WriteTotalTimeoutConstant = 50;timeouts.WriteTotalTimeoutMultiplier = 10;if (!SetCommTimeouts(hSerial, &timeouts)){printf("无法设置串口超时时间\n");return 1;}// 接收数据char data[100];DWORD bytesRead;if (!ReadFile(hSerial, data, sizeof(data), &bytesRead, NULL)){printf("无法接收数据\n");return 1;}// 显示接收到的数据printf("接收到的数据:%s\n", data);// 关闭串口CloseHandle(hSerial);return 0;}```十、联系方式作者:XXXEmail:XXX。
无人机半实物仿真系统串口通信模块设计

(上接第 53 页)
单的实例,这些平面图、视频已经不能满足对实训培训的需求 了。虚拟全景技术的应用可以弥补传统教学模式的不足,带给 学生身临其境的感觉,增强学生学习的积极性和主动性,使学 生能够在正式接触场景前接受“预培训”。通过设置交互热点, 学员可以与培训的场景进行互动,这不仅可以增强场景的真实 性,还可以增强学员的培训参与感,不同于面授课程学员单方 面的接收老师传授的专业知识,交互热点的设立使得培训成了 双向的互动式课程,使学生自主探索,加深印象。
RS485/RS422 串口通信协议
RS485 接口标准主要面向于多站互联,不需要数字地 线,以差分方式发送和接受数据,能够半双工工作,最大传 输速率为 115.2kbPs;最大传输距离为 1200m,能够差分 传送高阻抗噪声,实现双向主从通信,符合本项目中机载飞 控系统的技术指标要求。RS485 具有以下主要特点。
随着现代社会的发展,无人机重量轻、体积小、造价低、 隐蔽性好,特别适于执行危险性大的任务等优点极大的促进 着人们的生活,而无人机系统的实物实验风险高,代价大等 现实问题也给人们带来了巨大的困扰,半实物仿真为无人机 研制实验的最优的手段,可对无人机进行全系统综合测试。 极大缩短实验周期,节约试飞次数,节Байду номын сангаас研制费用。研制无 人机半实物仿真系统有着重要的意义。
31 万~ 60 万◎
图 2 通信原理图
机制进行串行通讯,MATLAB 常用的串口通信中断事件有: 输出缓冲区为空,串口接到的数据长时间处于非激活状态事 件,缓冲区有指定字节数目可用事件等。当串口上有中断的 事件发生时,MATLAB 会自动调用回调函数进行通信事件 的处理,图 3 是具体的编程程序流程图。
(3)RS485 的共线电路结构能够实现在数据传送中的 多个驱动器和收发器公用同一传输线的多点应用,使得其接 收器,发送器和收发器的组合单元可连接在平衡传送线上的
实验一串口通信和仪器控制

实验一串口通信和仪器控制
一、实验目的
1、在LabVIE中实现串口通信。
2、了解在LabVIE中的仪器控制和通信。
二、实验内容
编写串口读波形数据程序,参考程序图6-1至图6-3所示;编写仪器控制程序,参考GPIB读写子程序模块图6-1至图6-6所示。
图6-1 写串口程序框图
图6-2读串口程序框图
图6-3 向串口写波形数据程序
图6-4读串口波形数据面板
图6-5 GPIB Write程序
图6-6 GPIB Read程序
三、实验要求
1、将PC机的COM1和COM2用串口线连接起来或将两台PC机的串口连接起来,首先学会传输字符串数据,然后编程传输波形数据。
编程实现读串口波形数据程序,并将数据显示,写入电子表格文件。
2、了解仪器控制有关的仪器驱动程序和仪器总线与软件架构的基本知识,在此基础上重点针对RS-232、GPIB和VISA,了解和实现对仪器的控制和通信。
3、将PC机的串口与固纬数字储存示波器串口连接起来,通过IEEE-488.2命令或SCPI 命令控制示波器。
4、将PC机通过USB/GPIB Interface与固纬数字储存示波器连接起来, 通过IEEE-488.2命令或SCPI命令控制示波器。
四、思考题
1、串口通信中读字符串数据和读波形数据有什么区别?
2、计算机控制仪器的指令分为两类,其一是标准命令,这类指令是符合可编程仪器(Standard Command for Programmable Instrments,SCPI)的标准,;其二是厂家自定义的指令,这些命令的格式是特有的。
了解IEEE-488.2命令、SCPI命令和VISA库。
串口实验报告

串口实验报告串口实验报告一、引言串口是计算机与外部设备进行数据传输的一种常见方式。
在本次实验中,我们将学习如何使用串口进行数据的发送和接收,并通过实际的实验验证串口通信的可行性和稳定性。
二、实验目的1. 掌握串口通信的基本原理和工作方式;2. 学习使用串口发送和接收数据;3. 验证串口通信的可靠性和稳定性。
三、实验器材和方法1. 实验器材:- 一台计算机;- 一个串口线;- 一个串口转USB转接器;- 一个外部设备(如Arduino开发板)。
2. 实验方法:- 连接计算机和外部设备,确保串口线和转接器连接正确;- 在计算机上安装串口驱动程序(如果需要);- 编写程序,通过串口发送和接收数据;- 运行程序,观察数据的发送和接收情况。
四、实验过程与结果1. 连接实验设备:将串口线的一端连接到计算机的串口或USB接口,另一端连接到外部设备的串口接口。
如果使用的是USB转接器,将串口线连接到转接器的串口接口,然后将转接器的USB端口插入计算机的USB接口。
2. 安装串口驱动程序:如果计算机操作系统需要安装串口驱动程序,请根据操作系统的要求进行驱动程序的安装。
3. 编写程序:使用编程语言(如C++、Python等)编写程序,通过串口发送和接收数据。
根据实际需求,可以选择发送和接收不同类型的数据,如字符、整数、浮点数等。
4. 运行程序:运行编写好的程序,观察数据的发送和接收情况。
可以通过串口监视器或调试工具查看串口的数据传输情况,确保数据的准确传输。
五、实验结果分析通过实验,我们可以得出以下结论:1. 串口通信是一种可靠且稳定的数据传输方式,适用于各种外部设备和计算机之间的数据交互;2. 串口通信的速率可以根据实际需求进行调整,可以满足不同场景下的数据传输要求;3. 通过合理的编程和数据处理,可以实现复杂的串口通信功能,如实时数据采集、远程控制等。
六、实验总结本次实验我们学习了串口通信的基本原理和工作方式,并通过实际操作验证了串口通信的可行性和稳定性。
多路串行通信在微型无人机飞控计算机中的设计与实现

所示的信息交换途径 , 必须为飞控计算机另外扩展
4路 串行 通 信 接 口, 且要 求 带 4路 串 口扩 展 的飞 而 控 计算 机保持 小体 积 、 重量 和低 功耗 。 轻
负 着飞 行状 态 数 据 的 采 集 、 度 管 理 、 制 律 的 计 余 控 算、 与地 面基 站 通 信等 重 要 任 务 。一 般 微 型无 人 机
关键 词 : 串口扩展 ; L 6 5 4 D P; P D T 1 C 5 A; S C L
中图分 类号 :P 9 T31
文献标 识 码 : B
文章 编号 : 0 ~ 5120 )4 05 — 5 1 1 45 (06 0 — 07 0 0
Th sg n I plm e ato fAs n hr no s Com m u c ton e De i n a d m e nt i n o y c o u - nia i s
i i h n r l n m p t r f r Un a n d S a e He io tr n Fl tCo t o l g Co g i u e o m n e c l l p e c
C E igsn , I ig A o C E nnn H N Qn —og L n ,H N B , H N A —ig P
(ntuefIds il r es o t l h i g U i rt, a ghu3 2 C i ) Istt o uta Po s C nr ,Z ea nv sy H nzo 107, hn i n r c o jn ei 0 a
实验七串行口通讯实验报告

实验七串行口通讯实验报告一、引言串行口通讯是一种常见的数据传输方式,通过串行口可以在计算机和其他设备之间实现数据的传输和通信。
本实验通过使用Arduino开发板,以及利用串行口通讯实现从计算机向Arduino开发板发送指令,控制LED 灯的亮灭。
二、实验目的1.了解串行口通讯的基本原理和工作方式;2.掌握Arduino上位机通讯程序的编写及与硬件的串行口通讯方法;3.通过串行口通讯实现计算机对Arduino开发板的远程控制。
三、实验设备和器材1. Arduino Uno板;2.计算机;B数据线;4.杜邦线;5.LED灯。
四、实验原理当计算机与Arduino开发板连接时,可以通过串行口通讯实现双方之间的数据传输。
串行口通讯使用两根信号线:一根发送线(TX),用于发送数据;一根接收线(RX),用于接收数据。
通讯的双方都必须发送和接收数据,因此需要双向数据传输,即双向通讯。
五、实验步骤1. 连接Arduino开发板和计算机,使用USB数据线将两者连接;2. 打开Arduino IDE开发环境,编写以下代码并上传到Arduino开发板:```c++int ledPin = 13;void setuSerial.begin(9600);pinMode(ledPin, OUTPUT);void looif (Serial.available( > 0) { // 如果串行口接收到数据digitalWrite(ledPin, HIGH);digitalWrite(ledPin, LOW);}}```3. 打开串行监视器(Serial Monitor),设置波特率为9600,并选择“无”作为换行符;4.在串行监视器中输入“1”,回车,LED灯将点亮;5.在串行监视器中输入“0”,回车,LED灯将熄灭;6.关闭串行监视器。
六、实验结果和分析在本实验中,通过串行口通讯实现了从计算机向Arduino开发板发送指令,控制LED灯的亮灭。
基于嵌入式无人机实训报告(一)

基于嵌入式无人机实训报告(一)基于嵌入式无人机实训报告介绍本实训旨在通过嵌入式技术,设计一款可自主飞行的无人机。
实训内容1.嵌入式系统的设计2.电机驱动控制3.直升机平衡控制4.通信模块的设计嵌入式系统的设计嵌入式系统采用基于开源硬件平台的Arduino板,通过连接传感器和执行器实现系统的控制。
电机驱动控制采用直流电机驱动器对电机进行控制,通过PWM控制电机的速度和方向。
直升机平衡控制使用加速度计和陀螺仪传感器,通过PID控制算法实现直升机的平衡控制。
通信模块的设计采用无线通信模块实现无人机和控制端之间的通信和数据传输,通过串口通信实现数据的传输和控制指令的接收。
实训成果最终实现了一款基于嵌入式平台的自主飞行直升机,可通过控制端实现起飞、降落、悬停、方向控制等功能。
总结本实训通过嵌入式技术的应用,实现了一款可自主飞行的无人机,提升了学生的实践能力和综合素质。
实践意义该实训旨在为学生提供硬件开发和嵌入式系统的实践经验,培养学生的团队协作和创新思维能力,同时也拓宽了学生在无人机行业的就业前景。
实训难点本次实训的难点在于综合应用多种技术,如Arduino编程、电机控制、加速度计和陀螺仪的使用、无线通信技术等,需要同学们不断探索和实践。
实践收获通过实践,同学们不仅掌握了嵌入式系统的设计和开发技术,同时还提高了解决问题的能力和创新思维,为拓展个人职业发展方向打下了坚实的基础。
结束语本次实训让我们更深入地了解了嵌入式系统和无人机的开发实践,也让我们更加热爱和追求技术发展的世界。
感谢老师们的指导和同学们的合作,相信在未来的学习和工作中,我们也能够展现出更加出色的才华和创新能力!。
关于串口的实验报告

关于串口的实验报告1. 实验目的本实验的目的是通过学习并实践串口通信的基本原理和方法,加深对串口通信的理解,掌握串口通信的使用技巧和开发工具。
同时,了解串口通信在实际应用中的重要性和应用场景。
2. 实验原理串口是一种用于计算机与外部设备之间进行数据通信的接口标准。
在计算机中,串口通常通过RS-232或RS-485等标准来实现。
串口通信采用的是异步通信方式,即接收方和发送方的时钟不同步,通过发送和接收的数据包中的控制信息来实现数据的传输。
串口通信的基本原理如下:- 串口通信通过一个物理接口连接计算机和外部设备。
- 通信数据被分为一个个字节进行传输,每个字节由一定的控制信息和实际数据组成。
- 发送方通过发送字节的方式将数据发送给接收方。
- 接收方通过接收字节的方式将数据接收并进行处理。
3. 实验步骤步骤一:准备实验环境为了进行串口通信的实验,我们需要准备以下工具和设备:- 一台计算机- 一个串口转USB转换器- 一个外部设备(如Arduino、传感器等)步骤二:安装串口驱动程序在开始实验之前,我们需要安装串口转USB转换器所需的驱动程序。
驱动程序的安装方式因不同的设备而有所差异,一般可以通过官方网站下载并按照说明进行安装。
步骤三:编写串口通信程序根据所使用的编程语言和开发工具,编写一个简单的串口通信程序。
该程序应包括以下功能:- 打开指定的串口端口- 配置串口的波特率、数据位、停止位等参数- 循环读取串口接收缓冲区中的数据,并进行处理- 将需要发送的数据写入串口发送缓冲区步骤四:测试串口通信将串口转USB转换器插入计算机,并将外部设备连接至串口转USB转换器。
运行编写好的串口通信程序,并观察实验结果。
测试串口通信的方法可以有很多,可以通过发送和接收数据包来验证通信是否正常。
步骤五:总结与分析根据实验结果,总结并分析串口通信的性能和应用场景。
可以考虑以下问题:- 串口通信在哪些领域得到了广泛应用?- 串口通信有哪些特点和优势?- 在实际应用中,串口通信可能遇到哪些常见问题,如何解决?4. 实验结论通过本实验,我们了解了串口通信的基本原理和实际应用方法。
基于LabVIEW电动微型无人机动力系统串口通信控制
摘
要 :采用 R 2 2接 口标准 ,通过对 白定 义数 据帧格式进行 握手 ,实现由永磁无刷直 流电机 ,驱动控制 器构成 的 S3
电动微型无人机动力系统与上位机的数据通信 。上位机 串行 口直接数 据通信 软件采用 虚拟仪 器 ( aV E L b IW)一 IA VS 控件编程实现 ,V S IA控件 能够提 高数 据传输 的实时性而且简化 编程难度 。通 过硬软件 调试 ,实现 L b IW 上 位机 aV E 软件对电机起 动与停 止控 制 ,并 能根据 实际应用情况 发送给定 转速或 占空 比控制 指令 ,完成 电动力系统在 不同转速
h n s a i ewe n ee ti o r s se c o UAV n s— o u e . La VI a d h kng b t e lc rc p we y tms Mir a d ho tc mp t r b EW — S f n t n p o VI A u ci r — o
下 的 开 环 ,闭环 控 制 ,同时 监 测 下 位 机 采 集 的 电机 实 际转 速 、 电流 和报 警 等状 态 参数 。
关键词 :永磁无刷直流 电机 ;R 2 2串行接 口标准 ;Lb IW— IA S3 a VE VS
中 图分 类 号 :T 0 . ;T 3 M3 12 M 6+1 文 献 标 志 码 :A 文 章 编 号 :10 —8 8 2 1 )0 05 —5 0 164 (0 1 1—0 50
( o eeo u m t n N r w s r o t h i l nvrt , i n7 ,C ia C lg A t ai , ot e e P l e nc i sy X ' 9 hn ) l f o o h tn y c a U e i a 11 02
串口通信实验报告[学习]
![串口通信实验报告[学习]](https://img.taocdn.com/s3/m/5f969b12492fb4daa58da0116c175f0e7cd119ac.png)
串口通信实验报告[学习]本篇实验报告主要介绍串口通信实验的过程和结果。
在本次实验中,我们使用了Arduino Uno和Python编程进行串口通信,并成功实现了数据的发送和接收。
1. 实验设备和材料(1)Arduino Uno主板(2)USB线(3)Python IDE和安装了pyserial库的计算机(4)电阻、LED等基础电路元件2. 实验原理2.1 串口通信串口通信是一种在计算机或嵌入式系统之间进行数据交换的通信方式。
串口通信的本质是将数据流转换成逐位传输的电信号,包括RS-232、RS-485、USB、I2C(IIC)等协议,应用广泛。
在PC端,串口通信需要通过串口接口(如COM1、COM2等)进行连接,并在软件中指定相应的串口号和波特率等参数。
在嵌入式系统中,USART等通信接口直接与CPU进行连接,数据收发方式也需要根据具体接口和协议进行配置。
Arduino Uno主板上带有1个可编程串口,可控制和监视设备。
通过串口通信,可以实现数据的发送和接收。
在Arduino IDE中,使用Serial.begin()方法设置串口的波特率。
使用Serial.print()和Serial.println()方法发送数据,使用Serial.read()方法接收数据。
Python是一种高级编程语言,支持串口通信。
可以使用pyserial库实现串口通信。
在Python程序中,使用串口对象的write()方法发送数据,使用read()方法接收数据。
3. 实验步骤3.1 连接硬件将Arduino Uno主板连接到计算机,并使用USB线将其与计算机连接。
3.2 编写Arduino程序打开Arduino IDE,编写程序。
本次实验中,我们编写了一个简单的程序,使LED灯交替闪烁。
程序如下所示:void setup() {pinMode(13, OUTPUT);Serial.begin(9600);}void loop() {digitalWrite(13, HIGH);delay(1000);digitalWrite(13, LOW);delay(1000);Serial.println("LED Blinking");}程序中,我们使用Serial.println()方法输出字符串信息。
基于CSerialPortEx类的无人机地面站串口通信的实现

基于CSerialPortEx类的无人机地面站串口通信的实现作者:马少瑛,乌仁格日乐来源:《电脑知识与技术》2011年第22期摘要:设计中无人机与地面站之间的数据通信采用串口通信方式。
论文阐述了CserialPortEx类串口通信原理,介绍了在Windows环境下,使用Microsoft Visual C++6.0开发的基于CserialPortEx类的无人机地面站串口通信的编程实现方法。
测试表明该设计具有较好的稳定性和可扩展性,实现了无人机与地面站的通信。
关键词:无人机;地面站;串口通信;CserialPortEx类中图分类号:TP311文献标识码:A文章编号:1009-3044(2011)22-5312-03Implementation of Serial Communication Based on Class CSerialPortEx in UAV Ground Station MA Shao-ying, Wurengerile(Inner Mongolia University of Technology, Huhhot 010051, China)Abstract: Mean of communication is serial communication between the UAV and ground station in the design. The paper expounded the principle of serial communication class CserialPortEx, introduced the program for serial communication based on class CSerialPortEx in UAV ground station with Microsoft Visual C++ 6.0 under Windows. The test indicated the design had strong stability and expansibility. The design implemented communication between the UAV and ground station.Key words: UAV; ground station; serial communication; class CSerialPortEx无人机地面站是无人机系统的重要组成部分,它的任务是监测飞机的飞行状态和机载有效载荷的工作状态,使地面操作人员能够有效的对飞机和有效载荷实施控制。
多旋翼无人机二次开发 教程五 串口输出
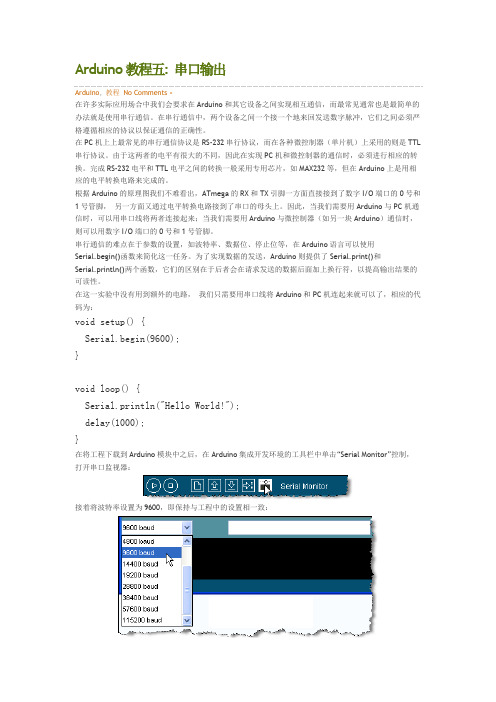
Arduino教程五: 串口输出Arduino, 教程No Comments »在许多实际应用场合中我们会要求在Arduino和其它设备之间实现相互通信,而最常见通常也是最简单的办法就是使用串行通信。
在串行通信中,两个设备之间一个接一个地来回发送数字脉冲,它们之间必须严格遵循相应的协议以保证通信的正确性。
在PC机上上最常见的串行通信协议是RS-232串行协议,而在各种微控制器(单片机)上采用的则是TTL 串行协议。
由于这两者的电平有很大的不同,因此在实现PC机和微控制器的通信时,必须进行相应的转换。
完成RS-232电平和TTL电平之间的转换一般采用专用芯片,如MAX232等,但在Arduino上是用相应的电平转换电路来完成的。
根据Arduino的原理图我们不难看出,ATmega的RX和TX引脚一方面直接接到了数字I/O端口的0号和1号管脚,另一方面又通过电平转换电路接到了串口的母头上。
因此,当我们需要用Arduino与PC机通信时,可以用串口线将两者连接起来;当我们需要用Arduino与微控制器(如另一块Arduino)通信时,则可以用数字I/O端口的0号和1号管脚。
串行通信的难点在于参数的设置,如波特率、数据位、停止位等,在Arduino语言可以使用Serial.begin()函数来简化这一任务。
为了实现数据的发送,Arduino则提供了Serial.print()和Serial.println()两个函数,它们的区别在于后者会在请求发送的数据后面加上换行符,以提高输出结果的可读性。
在这一实验中没有用到额外的电路,我们只需要用串口线将Arduino和PC机连起来就可以了,相应的代码为:void setup() {Serial.begin(9600);}void loop() {Serial.println("Hello World!");delay(1000);}在将工程下载到Arduino模块中之后,在Arduino集成开发环境的工具栏中单击“Serial Monitor”控制,打开串口监视器:接着将波特率设置为9600,即保持与工程中的设置相一致:如果一切正常,此时我们就可以在Arduino集成开发环境的Console窗口中看到串口上输出的数据了:为了检查串口上是否有数据发送,一个比较简单的办法是在数字I/O端口的1号管脚(TX)和5V电源之间接一个发光二极管,如下面的原理图所示:这样一旦Arduino在通过串口向PC机发送数据时,相应的发光二极管就会闪烁,实际应用中这是一个非常方便的调试手段;-)。
串口发送显示实验报告(3篇)
第1篇一、实验目的1. 了解串口通信的基本原理和流程。
2. 掌握使用串口发送数据的基本方法。
3. 学习如何通过串口接收并显示接收到的数据。
二、实验原理串口通信是指通过串行接口进行数据传输的一种通信方式。
在计算机系统中,串口通常用于连接外部设备,如打印机、鼠标、键盘等。
串口通信的原理是将数据按位依次发送,每发送一位数据后需要一定的延迟,以保证数据的正确传输。
串口发送显示实验主要涉及以下几个方面:1. 串口初始化:设置串口的波特率、数据位、停止位和校验位等参数。
2. 发送数据:通过串口发送指定的数据。
3. 接收数据:通过串口接收发送端发送的数据。
4. 显示数据:将接收到的数据在屏幕上显示出来。
三、实验环境1. 硬件环境:计算机、串口设备(如打印机、鼠标等)、串口线。
2. 软件环境:操作系统(如Windows、Linux等)、串口通信软件(如PuTTY、串口助手等)。
四、实验步骤1. 连接串口设备:将串口设备通过串口线连接到计算机的串口。
2. 初始化串口:打开串口通信软件,选择正确的串口和波特率,并设置其他参数。
3. 发送数据:在软件中输入要发送的数据,然后点击发送按钮。
4. 接收数据:在软件中观察接收到的数据,确认数据是否正确。
5. 显示数据:在软件中设置数据显示格式,将接收到的数据在屏幕上显示出来。
6. 实验结果分析:根据实验结果,分析串口发送显示实验的原理和步骤。
五、实验结果与分析1. 实验结果:在实验过程中,成功实现了串口发送和显示数据的功能。
2. 实验分析:(1)串口初始化:通过设置串口参数,确保数据能够正确传输。
(2)发送数据:在软件中输入要发送的数据,并通过串口发送出去。
(3)接收数据:通过串口接收发送端发送的数据,并显示在屏幕上。
(4)显示数据:在软件中设置数据显示格式,将接收到的数据在屏幕上清晰显示。
六、实验总结通过本次实验,我们了解了串口通信的基本原理和流程,掌握了使用串口发送数据的基本方法,并学习了如何通过串口接收并显示接收到的数据。
基于DCOM的无人机地面站串口通信模块设计

( e a met f t t n o va o , ol e f n i e n , r oc n i e n nVri Xia 1 0 8 C ia D p r no Auo i r i in C l g E gn r g Ai re gn r g i s t ma o f A t e o ei F E ei U e ’ n 3 , hn) 7 0
wi o t n a e e o r e t u y l k dr s u c . h a e Ke r s DCOM ; COM e d mo e; b fe ; a y c o o sa c s i g mu t h e d n y wo d : t a d l u r r h s h n u c e sn ; n r ltra ig i
( 空军工程 大学 工程 学 院航 空 自动控 制 工程 系 ,陕西 西安 7 0 3 ) 10 8
摘 要 :针对 目前 串口通 信组件 设 计 中的异 步调 用 与并发 运行 的问题 , 以及功 能上局 限在 串口管 理或 简单 数据 收发 的缺
陷, 采用分 布 式对 象组件模 型( C M) 出 了一种 新 的设 计 方案 。设 计 了异 步缓 冲 区模板 类和 线程 管理 器 , D O 提 实现 了通信 组件
Ab t a t Ac o d n o t ep o lms a s n h o o sa c s i g a d p r l l u n n n e s o t o n a n t n swi i sr c : c r i g t r b e sa y c r n u c e sn n a al n ig a d t h rc mi g t t u ci si t n t h er h h f o h he l t fs ra o t n a eo i l a aI i u r n e a o i i l r ma g rsmp e d t / n c e t r l mmu i ai n c mp n n e in. Th s c o o sa c s i gt e a mi o e p O r si c n c to o o e td sg e a y h n u c e sn s r l n r o i c mmu i ai n i t ra e S eh d i o n c to e f c ’ t o i lm e t d v a s l- e i e s c o o sb fe l s e lt n e d ma a e n ls . n m s mp e n e i e fd sg d a y h n u u rc a s mp ae a d t a n g me tca s n n r t r h
串口输入控制实验报告

串口输入控制实验报告实验目的本实验旨在利用串口通信实现对外部设备的控制,包括接收外部输入信号、解析信号内容,并根据指令驱动相应的操作。
通过本次实验,掌握串口输入控制的基本原理和实现方法,提高对嵌入式系统交互的理解。
实验设备与材料- 一台电脑- 一块开发板- USB转串口模块- 杜邦线- 外部设备(例如LED灯、蜂鸣器等)实验原理串口通信是一种通过串行数据线进行传输的通信方式,常用于嵌入式系统和计算机之间的数据传输。
在本实验中,我们将利用串口通信实现计算机对外部设备的控制。
具体流程如下:1. 通过USB转串口模块,将计算机的串口TX(发送)和RX(接收)与开发板的串口RX和TX相连接。
2. 在开发板上配置串口通信的波特率、数据位、校验位等参数,以确保与计算机的串口设置保持一致。
3. 在开发板上编写代码,使其能够接收计算机发送的指令,并根据指令控制外部设备的操作。
4. 在计算机上编写程序,通过串口发送指令给开发板,以控制外部设备。
实验步骤1. 将USB转串口模块的USB口连接至计算机。
根据USB转串口模块的规格,确定对应的串口号(如COM1、COM2等)。
2. 将USB转串口模块的串口TX和RX引脚分别连接至开发板的串口RX和TX 引脚。
确保连接正确,避免引脚短路或无连接。
3. 在开发板上配置串口通信参数。
根据开发板的型号和规格,参考相关文档设置波特率、数据位、校验位等参数。
4. 编写开发板上的程序。
根据串口通信的库函数,设置串口接收中断,当接收到计算机发送的指令时触发中断。
5. 解析接收到的指令。
根据指令的格式和内容,进行解析,并根据指令内容驱动外部设备的操作。
例如,如果指令是控制LED灯亮或灭,可以通过控制IO口的电平改变灯的状态。
6. 在计算机上编写控制程序。
利用计算机的串口编程接口,发送指令给开发板。
指令的内容可以根据需要自行定义,确保指令的格式和内容与开发板程序的解析相一致。
7. 运行程序,观察外部设备的反应。
基于CSerialPortEx类的无人机地面站串口通信的实现

基于CSerialPortEx类的无人机地面站串口通信的实现
马少瑛;乌仁格日乐
【期刊名称】《电脑知识与技术》
【年(卷),期】2011(007)022
【摘要】设计中无人机与地面站之间的数据通信采用串口通信方式.论文阐述了CserialPortEx类串口通信原理,介绍了在Windows环境下,使用Microsoft Visual C++6.0开发的基于CserialPortEx类的无人机地面站串口通信的编程实现方法.测试表明该设计具有较好的稳定性和可扩展性,实现了无人机与地面站的通信.
【总页数】3页(P5312-5314)
【作者】马少瑛;乌仁格日乐
【作者单位】内蒙古工业大学,内蒙古呼和浩特010051;内蒙古工业大学,内蒙古呼和浩特010051
【正文语种】中文
【中图分类】TP311
【相关文献】
1.基于DCOM的无人机地面站串口通信模块设计 [J], 徐嵩;孙秀霞;董文瀚;李湘清;李大东
2.基于CSerialPortEx类的无人机地面站串口通信的实现 [J], 马少瑛;乌仁格日乐
3.基于WPF技术的无人机地面站软件设计与实现 [J], 张玉民;何鑫;杨百川
4.基于无人机地面站的虚拟遥控器的设计与实现 [J], 石秀;曾桂根
5.基于ASAAC标准的无人机地面站系统管理方案的设计与实现 [J], 朱江;景文君;闫乐;王冠;李虎
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中北大学
四旋翼无人机实践模块测试报告
学院:
专业:
学号姓名:
学号姓名:
学号姓名:
起迄日期:
设计地点:
指导教师:
2018年5月25日
实验一串口通讯实验
一、实验目的
四旋翼无人机硬件模块及软件编程知识调研、学习
二、实验仪器
计算机、无人机、遥控器、数据线、电池
三、实验步骤
打开计算机;
打开匿名空间站;
将无人机、遥控器和计算机连接上,并连接上空间站;
编写程序,用keil软件调试,波特率为115200,
USART_ART_WordLength = USART_WordLength_8b;//字长为8位
USART_ART_StopBits = USART_StopBits_1;//一个停止位USART_ART_Parity = USART_Parity_No;//无奇偶校验位
初始化
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先
级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;//子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ通道使能
NVIC_Init(&NVIC_InitStructure);//中断优先级初始化;
将程序写进无人机,并拔出usart串口,此时无人机里的单片机将以1s为周期发送“1506014142 16组”,USB接口上的led灯以0.5s为周期闪烁;
当时间为50s的整数倍时,发送“/空格//空格/无人机实验测控/空格//空格/”;同时接收从串口发过来的数据,把发送过来的数据直接送回给电脑。
对于串口设置的一般步骤
1.串口时钟使能,GPIO时钟使能;
2.串口复位;
3.GPIO端口模式设置;
4.串口参数初始化;
5.开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤);6.使能串口;
7.编写中断处理函数。
四、实验数据记录
图一
图二
五、实验数据分析、处理及讨论
串口作为MCU的重要外部接口,同时也是软件开发重要的调试手段,其重要性不言而喻。
现在基本上所有的MCU都会带有串口,STM32自然也不例外。
STM32的串口资源相当丰富的,功能也相当强劲。
STM32F103c8t6最多可提供5路串口,有分数波特率发生器、支持同步单线通信和半双工单线通讯、支持LIN、支持调制解调器操作、智能卡协议和IrDA SIR ENDEC规范、具有DMA等。
接下来我们将主要从库函数操作层面结合寄存器的描述,告诉你如何设置串口,以达到我们最基本的通信功能。
我们将实现利用串口1不停的打印信息到电脑上,同时接收从串口发过来的数据,把发送过来的数据直接送回给电脑。
可以任意修改程序中的发送的数据和发送频率,并成功发送
六、感想、体会、收获等
本次实验只是本次实训的开始,对无人机的好奇和对知识的渴望让我们坚信接下来的实验我们会完成的很好。