1 SI CANopen模块与台达变频器通信测试
台达CANopen现场总线产品通讯整合应用实例
前言:近年来,各种现场总线技术在愈来愈多的工业现场得到良好的应用,国外多家知名自动化厂商相继推出了现场总线类产品,为了适应工业自动化产品技术发展的需要,满足众多客户现场总线应用需求,台达也推出了CANopen总线产品,支持台达全系列自动化产品,同时支持自定义设备,可以支持其他厂商产品接入CANopen现场总线。
本项目就是利用台达CANopen总线和台达其他自动化产品整合应用,基于CANopen现场总线通讯协议,达到高速通讯响应的控制要求。
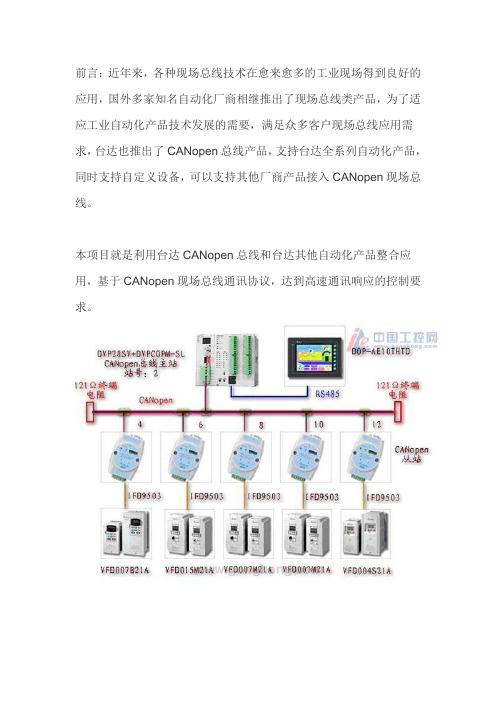
控制系统技术方案配置:详见下表序号元件名称型号规格数量(台)备注1人机界面DOP-AE10THTD110.4”2PLC主机DVP28SV11R116K Step3CANopen主站DVPCOPM-SL1SV左侧高速扩展4CANopen从站IFD95035CANopen/Modbus5变频器VFD007B21A750W,单相220V6变频器VFD007M21A3750W,单相220V7变频器VFD004S21A1400W,单相220V上述表格仅列举出技术方案主要元器件,此外还包括121Ω终端电阻以及其他通讯连接电缆等辅助器件,此处均不予赘述。
控制系统原理框图简要介绍:采用CANopen现场总线作为通讯介质,主要为了实现多从站大量数据高速通信响应和提高通讯稳定性,和传统Modbus通讯协议比较,CANopen总线通讯协议有质的飞跃,数据通讯不再受到Modbus轮询方式的制约,大大提高了主从站之间的大量数据通讯响应速度和稳定性。
人机界面通过RS485和主站28SV PLC连接,28SV左侧高速并行接口连接CANopen总线主站模块DVPCOPM-SL,5台CANopen 总线从站模块IFD9503分别连接5台台达变频器,系统实现人机输入频率和启停命令,实时显示变频器输出频率、电流、电压等参数数值。
控制系统原理框图:人机界面画面如下:人机界面可以实现:分别设定5台变频器给定频率和启动、停止运转信号;可以分别显示5台变频器运行参数数据,包括输出频率、输出电流、输出电压等等。
台达专用canopen指令

台达专用canopen指令CANopen是一种基于CAN(控制器区域网络)协议的应用层标准,由国际机械电子工程师协会(CIOMS)制定。
它具有优良的性能和完善的功能,在数据传输与设备管理领域有着广泛的应用。
台达能源(Taida)是一家国际性的领先的数字系统技术研发机构,主要从事CANopen协议标准解决方案的开发和发展。
该公司专注于满足客户不断变化的需求,为客户提供台达专用CANopen指令。
台达专用CANopen指令用于控制CANopen控制装置,具备以下功能:(1)可实现CANopen控制装置节点之间的交互,控制控制设备和传感器,建立快速和可靠的通信网络,实现信息的可靠传输;(2)能够实现CANopen节点之间的多种数据传输,如实时数据的传输和历史数据的传输,实现数据的有效管理;(3)支持多种CANopen总线系统,可以实现多总线上的多节点的数据控制,包括控制的硬件设备和I/O模块;(4)可实现CANopen节点硬件设备的自动发现,支持多种CANopen节点设置,如节点名称设置、节点ID设置、数据点定义等;(5)可实现CANopen网络的节点配置,可以实现网络拓扑结构的构建、节点之间的设置联动,以及网络数据的同步更新,节点参数的实时监测等。
台达专用CANopen指令可以有效地满足客户多样化的需求,提高业务运作的效率和可靠性。
它的应用范围很广,主要应用于工业自动化系统、工厂现场管理等。
它可以实现设备之间的高速、实时、可靠的数据传输,保证系统的安全性和可靠性,提升了企业的运行效率和经济效益。
台达专用CANopen指令具有易用性、安全性和可靠性等多方面的优点,受到了越来越多的客户的好评。
随着信息化程度的不断提高,将会有更多的客户采用这种应用层标准,为客户提供更好的服务。
台达将会秉持着“技术为先,创新为本”的宗旨,不断创新技术,不断提高产品质量,为社会和客户创造更多的价值。
台达CANopen通讯伺服速度S控制

16.16 通过CANopen 总线控制ASDA-A2伺服驱动器(DS402)¢ 控制要求当 X0=ON 时,变频器停止并进入准备运转状态;当 X1=ON 时,变频器运转,运转速度为900转/分钟,运转方向为顺时针旋转。
¢ 连接示意图¢ 台达ASDA-A2 伺服驱动器通讯参数设置¢ ADSA-A2 伺服驱动器在本例中配置的参数说明参数 设置值 说明P1-01 b 设置伺服工作模式为CANopen模式。
P03-002设置ASDA-A2伺服CANopen 站号P03-01 0400ASDA-A2伺服CANopen 通讯速率设置为1Mbps 。
P03-01的第三位用于设置伺服的CANopen 通讯速率,其值与通讯速率对应关系如下所示:0:125Kbps 1: 250Kbps 2: 250Kbps 3: 500Kbps 4: 1M Kbps参数索引 参数子索引 参数说明 6083 0 伺服驱动器才从0rpm 加速到3000rpm 需要的时间,单位ms 。
6084 0 伺服驱动器才从3000rpm 减速到0rpm 需要的时间,单位ms 。
6081 0 伺服驱动器速度,单位为单元/每秒。
607A 0伺服驱动器目标位置,单位为单元。
¢模块设置按照下表分别对DVPCOPM-SL扫描模块进行设置模块名称节点地址通讯速率DVPCOPM-SL 扫描模块011M bpsASDA-A2伺服驱动器021M bps¢使用 CANopen 网络配置工具配置网络1. 打开 CANopenBuilder 软件,软件界面如下图所示。
2. 选择『设置(S)』菜单,点击『通讯设置』,选择『串口设置』指令。
3. 在此对计算机与 SV 主机的通讯参数进行设置。
如”通讯端口”、”通讯地址”、”通讯速率”、”通讯格式”。
项目说明默认值当计算机连接的设备为DVPCOPM-SL时,接注:CANopenBuilder 组态软件中的通讯速度,数据位,校验位,停止位以及模式的选择须与 SV PLC 主机设置一致。
关于CANopen通讯模块的使用方法
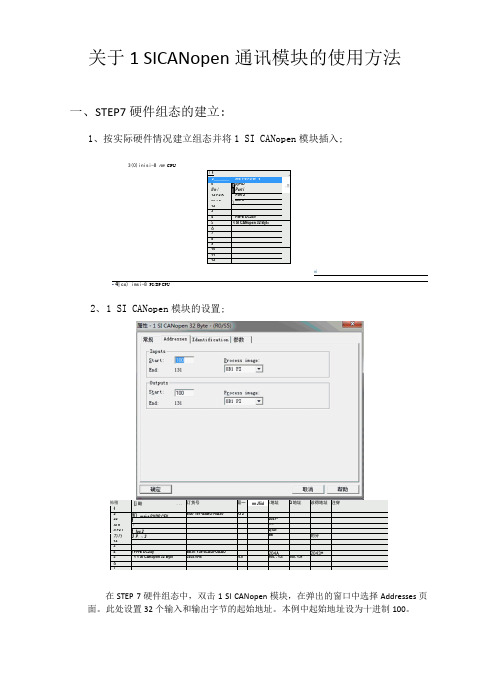
关于1 SICANopen通讯模块的使用方法一、STEP7硬件组态的建立:1、按实际硬件情况建立组态并将1 SI CANopen模块插入;3(0)inisi-8 nm CPU「1A2 ________ ms 1-8 P9/W "VIl n /irIFpjr-iDPert i,三12 P2 K Fort 2X1 P3\Are 31234PM-E DC24V5| 1 SI CANopen 32 Byt<6789101112ni- 4| co) imsi-8 PS/DP CPU怖稽[j 酸...订货号固一nn Jfiid i地址Q地址诊得地址注穿12即msi-s P9/DP CFV6IS7 151-GABO1-0A90Y3 22212047^Xi n *I*/冢如Il P2 l 1 foe 22(X5/力乃J P。
八3aw*的分1234y PH-E DC24y BEST 138-4CAOI-OAAO204A2043*5 1 1 SI CAKopon 32 Byte020570-B VI.0100. . 13!100. 13167在STEP 7硬件组态中,双击1 SI CANopen模块,在弹出的窗口中选择Addresses页面。
此处设置32个输入和输出字节的起始地址。
本例中起始地址设为十进制100。
2、1 SI CANopen模块的设置;在性-1 SI CANopen 32 Byte - (R0/S5)常规Addresses | Identification确定选择“参数”页面,设置“Baudrate”以及input/output data size,如上图所示。
PS:理论上Process data mode因为本次传输数据在32 Byte内,可选择Standard模式,但不知道为什么会报错,所以选择Fragmented模式。
双击STEP 7硬件组态中的CPU,选择“周期/时钟存储器”,修改过程映像输入/输出区的大小。
Profinet转CanOpen连接台达伺服驱动器ASDA-B3

倍讯科技CANOPEN(BX-631-PN)连接台达伺服驱动器ASDA-B3西门子S7-1200系列的PLC,需要连接带CANOPEN的通讯功能的伺服驱动器设备。
西门子的PLC采用PROFINET实时以太网通讯协议,要连接CANOPEN的设备,就必须进行通讯协议转换。
倍讯科技Profinet转CanOpen系列的网关提供了快速可行的解决方案。
1、首先从西门子组态安装GSD文件开始,选择GSD所在文件夹,勾选并安装。
紧接着组态对型设备,PLC与Profinet转CanOpen网关进行分配,连接IO控制器PLC_1 PROFINET端口_1;2、PLC与Profinet转CanOpen网关连接后,需要修改Profinet转CanOpen网关的IP地址和PROFINET名称;3、设备名称和IP地址修改完成后需要添加所需字节数,双击Profinet 转CanOpen网关模块,通过右侧模块添加Input(输入),Output(输出),最后下载到设备。
4、以上是西门子组态中的配置操作已经完成,需要注意的已经用红色字体标注。
接下来是对网关的配置软件进行参数配置。
打开CanOpen Configuration Tools,关于主设备通用属性参数设置。
波特率要与从站设备一致,通讯周期0x00000000改成0x0000ffff;5、此界面设置Profinet转CanOpen网关在Profinet网络中的设备名称及IP,要与plc组态软件中保持一致。
(注意:如果名称中有特殊符号或中文那么需要与转换的名称保持一致);6、从属设备参数,在PDO参数中添加所需参数。
单击RPDO、TPDO 将传输类型修改成Event-driven(manufacturer)—事件触发;7、配置完成后下载配置到Profinet转CanOpen网关,先点击设置。
搜索Profinet转CanOpen网关默认IP(电脑要与Profinet转CanOpen 网关保持在同一网段否则无法下载),下载成功后软件左下角会有成功提示文字显示;8、通过配置软件设置对从属设备参数设置后进入PLC监控界面对伺服器进行控制;。
配置案例丨Canopen转Profinet网关连接台达伺服

配置案例丨Canopen转Profinet网关连接台达伺服简介:本案例需求为客户要求将台达伺服通过北京小疆智控(北京)技术有限公司生产的CanOpen转Profinet网关接入到西门子PLC中,具体配置方法如下:1、选择安装由CanOpen转Profinet网关供应商提供的GSD文件;2、选择GSD所在文件夹(注意不是选择文件,选择文件夹后会出现在选择框内)本例为桌面,选择对应CanOpen转Profinet网关网关进行组态;3、设置CanOpen转Profinet网关IP地址和设备名称(本例设备名称为PN1,IP地址为192.168.20.5),设备名称不要自动生成;4、添加CanOpen转Profinet网关的输入输出字节长度,下载组态到PLC即可;5、通过CanOpen转Profinet网关的配置软件配置canopen从站,首先通过软件导入从站的EDS文件;6、导入后添加主从站设备;7、点击主站设置从站波特率及周期心跳等参数;8、错误控制页面设置网关心跳监控;9、设备参数界面用来设置CanOpen转Profinet网关的IP地址和设备名称,要和PLC组态中保持一致。
10、设置从站PDO参数,在PDO处右键添加索引参数。
RPDO对应网关的发送,TPDO对应网关的接收。
(注意,需提前知道那些参数可读,哪些可写);11、传输类型可选择周期或者触发模式;12、注意:台达默认的eds文件不会对COB-ID进行排序,需手动修改如站地址为1那么180改为181,200改为201之后要对通道偏移进行手动或自动更改,以对应PLC的IQ地址,如Q地址范围是68-100,那么参数偏移值为0。
那么QW68就是控制字,如填2那么QW70就是控制字,以此类推,生成之后进行下载,下载后对CanOpen转Profinet网关重新上电即可。
待CanOpen转Profinet网关OK灯变亮,err灯灭,说明网关硬件连接正常。
台达变频器与PLC通讯功能的实现方法

台达变频器与PLC通讯功能的实现方法一、引言在自动化控制系统中,变频器作为一个重要的控制设备,常常与PLC (可编程逻辑控制器)进行通讯。
变频器与PLC的通讯功能的实现,可以实现在PLC控制下对变频器进行远程控制,从而实现对电机的速度、转向等参数的控制,提高整个系统的稳定性和灵活性。
二、PLC与变频器通讯的基本原理1.串行通讯原理:PLC与变频器之间的通讯一般采用串行通讯方式,即通过串行通信口发送和接收数据。
PLC通过串行通信口将控制命令和参数发送给变频器,变频器接收到数据后进行相应的操作,并将反馈的数据发送给PLC,PLC 再根据反馈数据进行相应的处理。
2.通讯协议选择:通讯协议是PLC与变频器之间通讯的规则,不同的厂家和型号的变频器通常采用不同的通讯协议。
在选择通讯协议时,需要考虑PLC和变频器的兼容性,以及通讯速度、稳定性等因素。
常用的通讯协议有Modbus、Profibus、CANopen等。
三、台达变频器与PLC通讯实现方法1.Modbus通讯协议实现方法:Modbus是一种常用的通讯协议,因为其简单、可靠而被广泛应用于自动化领域。
实现变频器与PLC的通讯,可以选择Modbus RTU或Modbus TCP通讯方式。
(1)Modbus RTU通讯方式在Modbus RTU通讯方式下,PLC通过RS485接口与变频器连接。
PLC发送Modbus RTU格式的命令帧,包括从站地址、功能码、寄存器地址等信息,变频器接收到命令后进行相应的操作,并将结果通过RS485接口发送给PLC。
(2)Modbus TCP通讯方式在Modbus TCP通讯方式下,PLC与变频器之间通过以太网连接。
PLC通过以太网发送Modbus TCP格式的命令帧,包括从站地址、功能码、寄存器地址等信息,在以太网中传输。
变频器接收到命令后进行相应的操作,并将结果通过以太网发送给PLC。
2.Profibus通讯协议实现方法:Profibus是一种采用国际标准的工业现场总线,具有高速、可靠等特点。
台达新推出内建CANOpen主站的C2000变频器

梯起重等行业 。
在 工控 领 域 里 ,两 台机 器 以 上 的 变 频器 应 用 ,必须 以 P C 系统 控 制 核 心 , L为 来 满 足逻 辑 演 算 、过 程 控 制 、 计 数 、 计 时 等 复杂 控 制 。 台达 C 0 0系 列 一 改 变 20
随着低 压变频器 市场 的竞争加 剧 , 机械行业用户不仅要求产品具有速度 同
应对 。
机床操作和编程提供更多便利。该纵切
机 还 有各 种 有 用 的 选 项 , 角度 动力 头 、 如 高速 钻 铣 主 轴 和 有 德 马 吉 专 利 的 直 驱 式 旋 风 铣头 。 驱 式 旋风 铣 是 D G 发 的最 直 M开 新 技 术 。 若在 S r n 2 ln a p i t 0 8 i e r纵 切 机 使 用 直 驱 式 旋 风 铣 头 加 工螺 纹 ,表 面 粗 糙度 可 以 达 到 O 1 u m .2 。 S r n 0 8 1 na 可 以提 高 生产 p i t 2— e r i 效率 ,降低 单件 成 本 ,尤 其适 用 于 汽 车 、 液 压 、气 动 元 件 、 电子 和 医 疗 行 业 。
步 的 功 能 , 同 时 也 要 达 到位 置 同 步 的控 制 。 为 满 足用 户对 变频 器 同 步控 制 的 需 求 , 台达 C 0 0系 列 变 频 器 上 搭 载 了 同 20
频器 仅为 纯粹 驱动 的传 统角 色 , 内建 PC L 程序容量达 1 t p 0 K s e ,程序扫描时 问大幅缩短 ,新增多种 高阶应用指 令,
搭配 网络 系 统 可 达 成 分 布 式控 制 与独 立 操 作 等 系 统 功 能 , 并 符 合 CAN0 e P n
D 4 2 范 ,让 C 0 0 动器 整 合 P C S0 规 20 驱 L 可
台达专用canopen指令
台达专用canopen指令CanOpen是一种工业电子设备通信协议,它常用于控制和诊断机器或自动化系统。
这种协议可以提供一套编程规则,使得硬件更容易编程,从而能够管理和协调机器的各种功能。
CanOpen是一种直接的层次化的协议,它的结构更加精简,更易于实施和管理。
台达专用CanOpen指令台达是一家专业的变频器制造商,推出了一种新的智能控制产品系列台达专用的CanOpen指令。
这种指令可以实现变频器的各项功能,包括频率、电流限制、转矩等。
在使用CanOpen指令进行控制时,台达设备支持两种通信方式:CANopen总线和485 MODBUS RTU。
CanOpen总线是一种实时的专用通信总线,它支持高速数据传输,并且可以进行有线传输,实现台达设备的控制和监控。
而485 MODBUS RTU则是台达设备支持的一种总线通信标准,可以实现跨网络、跨环境控制。
台达变频器支持通过CANopen总线指令通信,包括 PDO(Process Data Objects)和 SDO(Service Data Objects)等。
PDO用于发送实时数据,主要用于实现台达设备的状态监控;而SDO则是台达设备支持的参数设定和修改指令,直接控制变频器的各项参数。
台达设备支持的485 MODBUS RTU指令,主要用于台达设备的配置和参数的读取和修改,以及状态的查询和诊断。
它也可以用于各种自动化系统的设备监控和控制,帮助用户实时了解设备的状态和运行情况。
台达智能设备的可编程性台达智能设备通过CanOpen总线和485 MODBUS RTU指令进行通信,可实现台达设备的可编程性。
通过台达变频器提供的智能控制和诊断功能,可以实现台达智能设备的可靠运行,并能够灵活处理复杂的工业应用。
同时,使用CanOpen指令和485 MODBUS RTU指令可实现对台达智能设备的更新和升级,以及实现台达设备的跨网络、跨环境控制。
结论台达变频器支持的CanOpen指令和485 MODBUS RTU指令可实现台达智能设备的可编程性,并可实现台达智能设备的可靠性,以及灵活处理复杂的工业应用。
台达专用canopen指令
台达专用canopen指令CANopen是一种建立在CAN总线基础上的应用层协议,由台达公司推出的自定义CANopen专用指令是支持它的有效控制协议。
台达的CANopen指令可以实现对设备的远程监控,可以实现状态查询、参数读取/写入、历史数据分析和服务器管理等应用功能,并具有可容错性、快速响应性和低功耗特性。
CANopen指令有效性台达的CANopen指令是一种有效的控制协议,其功能包括对设备远程控制、状态查询、参数读取/写入、历史数据分析和服务器管理等。
这是由于它具有容错性、快速响应性和低功耗特性,可以有效地降低设备运行和维护的成本,同时改善设备的安全性和稳定性。
台达的CANopen指令也大大简化了设备的网络架构,通过一个简单的CAN总线可以实现对多个设备的控制,节省了组态的时间和费用。
此外,它还具有节能特性,可以节省设备的能量消耗,从而降低使用成本。
台达专用CANopen指令应用台达专用CANopen指令可以应用于各种设备,包括温度控制器、监控报警器、手动控制面板、光学传感器、编码器等。
它可以实现设备的远程控制,让用户实时了解设备的状态,还可以方便地读取/写入设备参数,实现自动化控制功能。
台达的CANopen指令还可以用于检测设备故障,在设备出现问题时可以通过指令检测出故障原因,从而降低设备维护的成本。
此外,它还可以用作对设备历史数据的分析,以便了解设备运行情况,实现故障预警功能。
台达专用CANopen指令优势在使用台达的CANopen指令时,可以享受到许多优势:1. CANopen指令可以简化设备的网络架构,大大减少了组态时间和费用。
2.以实现同时对多个设备的远程控制,提高了设备操作效率。
3.有容错性、快速响应性和低功耗特性,降低设备运行和维护的成本。
4.现节能,减少设备的能量消耗,等等。
结论总之,台达的CANopen指令是一种有效的控制协议,可以实现对设备的远程监控、状态查询、参数读取/写入、历史数据分析和服务器管理等应用功能,并具有可容错性、快速响应性和低功耗特性,从而有效地改善设备的安全性和稳定性,提高设备操作效率,减少设备运行和维护的成本。
台达工控产品canopen解决方案

台达工控产品canopen解决方案台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
Abstract: In this paper, the solution in CANopen for Deltaindustrial products is presented, whichdisplays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络 (Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
台达专用canopen指令
台达专用canopen指令
CANopen是基于CAN总线的一种应用层总线协议,它有良好的可扩展性,并且可以方便地结合多种不同的网络结构,可以满足大多数用户的需求。
它可以支持某些特定的设备,比如台达专用CANopen指令。
台达专用CANopen指令是指台达公司专用的CANopen应用层协议指令,它可以实现系统控制及网络通信功能的统一。
它能够将CANopen 的特性,如控制器的功能、控制结构、数据传输进行深度整合,满足客户对“台达系统”的各种定制需求,从而实现系统控制和网络通信功能。
台达专用CANopen指令拥有多种使用场景。
在工厂自动化方面,台达专用CANopen指令能够实现多台设备之间的无线连接,因此工厂自动化能够无缝集成,远程调节及监控,具备更佳的动态应用性。
对于特定的智能设备,如台达智能传感器,台达的CANopen指令也能够提供精确的定位机制,可以有效指导系统的行走,实现智能机器人的控制。
此外,台达的CANopen指令可以实现系统端到端的数据传输,可以实现多台设备之间的高速通信。
这种数据传输能够有效地减少在网络中数据传输的延迟,提高系统的工作效率,还可以支持多种应用,使系统的操作及管理更加便捷。
台达的CANopen指令能够为用户提供灵活的选择,满足不同环境的多样化需求。
它具有良好的可靠性和可扩展性,可以满足用户的个
性化需求,能够满足客户的各种定制需求,为智能制造提供技术支持。
总结起来,台达专用CANopen指令是一种非常有用的通信协议指令,它可以实现系统控制和网络通信功能,能够支持多种应用场景,满足用户的个性化需求,实现更高效的通信传输,为智能制造提供技术支持。
台达变频器与PLC通讯功能的实现方法

台达变频器与PLC通讯功能的实现方法1.硬件连接:首先,需要将变频器和PLC进行硬件连接。
通常情况下,可以通过RS485或者RS232接口进行连接。
将PLC的通讯接口与变频器的同样的通讯接口进行连接。
确保连接正确且稳定。
2.设置通讯参数:在变频器和PLC之间进行通讯之前,需要设置通讯参数。
通讯参数包括通讯的波特率、数据位数、停止位数、校验位等设置。
这些参数需要根据具体的设备和通讯方式来进行设置,确保两个设备间能够正常通讯。
3. 使用通讯指令:变频器和PLC之间的通讯是通过发送和接收不同的通讯指令来进行的。
对于台达变频器和PLC通讯,主要使用Modbus协议。
在PLC的程序中,需要编写相应的指令,通过串口发送给变频器。
而变频器接收到指令后,会返回相应的数据给PLC。
这样就完成了变频器和PLC之间的通讯。
4.PLC程序编写:在PLC中,需要编写相应的程序来实现与变频器的通讯功能。
一般来说,可以使用PLC的通讯模块库来简化通讯指令的编写工作。
通过调用相应的函数,可以实现与变频器的通讯。
在PLC程序中,可以编写读取变频器的运行状态、设置变频器的参数等功能。
5. 变频器参数设置:除了在PLC程序中进行通讯指令的编写,还需要在变频器中进行相关的参数设置,以便于与PLC进行通讯。
一般来说,需要设置变频器的Modbus地址、通讯参数等。
这样才能确保变频器能够正确地接收和返回数据。
总结起来,实现台达变频器与PLC通讯功能的步骤包括:硬件连接、设置通讯参数、使用通讯指令进行通讯、PLC程序编写和变频器参数设置。
通过以上步骤的完成,就可以实现变频器与PLC之间的通讯功能,实现数据的读取和设置。
这样可以更好地实现对变频器的控制和监控。
Twido与变频器ATV61 71的Canopen通讯V1.00
ATV61/71与Twido PLC的Canopen通讯施耐德技术服务中心王兆宇摘要:本文详细说明了变频器61/71内置的Canopen 与TwidoPLC的通讯。
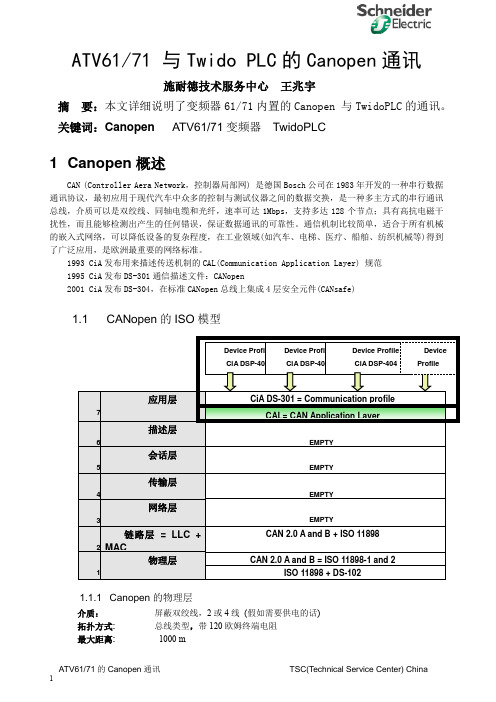
关键词:Canopen ATV61/71变频器TwidoPLC1 Canopen概述CAN (Controller Aera Network,控制器局部网) 是德国Bosch公司在1983年开发的一种串行数据通讯协议,最初应用于现代汽车中众多的控制与测试仪器之间的数据交换,是一种多主方式的串行通讯总线,介质可以是双绞线、同轴电缆和光纤,速率可达1Mbps,支持多达128个节点;具有高抗电磁干扰性,而且能够检测出产生的任何错误,保证数据通讯的可靠性。
通信机制比较简单,适合于所有机械的嵌入式网络,可以降低设备的复杂程度,在工业领域(如汽车、电梯、医疗、船舶、纺织机械等)得到了广泛应用,是欧洲最重要的网络标准。
1993 CiA发布用来描述传送机制的CAL(Communication Application Layer) 规范1995 CiA发布DS-301通信描述文件:CANopen2001 CiA发布DS-304,在标准CANopen总线上集成4层安全元件(CANsafe)1.1 CANopen的ISO模型1.1.1 Canopen的物理层介质:屏蔽双绞线,2或4线(假如需要供电的话)拓扑方式: 总线类型,带120欧姆终端电阻最大距离:1000 m通讯波特率:从1MB到10KB 9种可能速度(决定于总线长度和电缆类型:25米时1Mbps, 1000 米时10Kbps)最大设备数:128(1个主站和127个从站)1.1.2 Canopen的链路层介质通路方法: CSMA/CA一旦总现空闲,每个设备都可以发送数据,如果发生冲突,显性和隐性位使能非破坏性仲裁法则,信息优先权通过标示符值进行识别,标示符值越小,权限越高通信模式: 生产者/消费者标示符以11位进行编码,位于信息包起始位置,用于通知接受者每个信息包中的数据类型,每个接受者决定是否接受数据。
台达变频器通讯协议(ASCII模式)
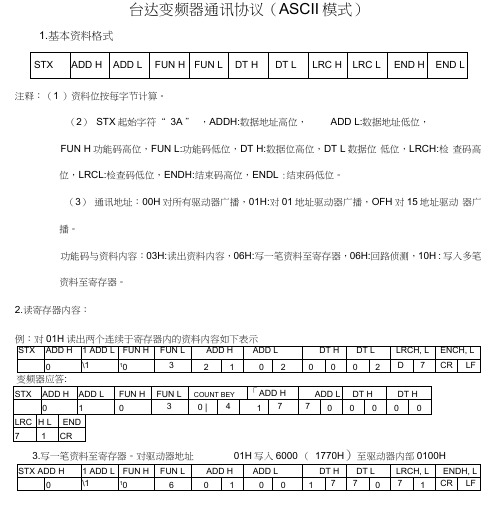
台达变频器通讯协议(ASCII模式)1.基本资料格式注释:(1 )资料位按每字节计算。
(2)STX起始字符“ 3A ” ,ADDH:数据地址高位,ADD L:数据地址低位,FUN H功能码高位,FUN L:功能码低位,DT H:数据位高位,DT L数据位低位,LRCH:检查码高位,LRCL:检查码低位,ENDH:结束码高位,ENDL :结束码低位。
(3)通讯地址:00H对所有驱动器广播,01H:对01地址驱动器广播,OFH对15地址驱动器广播。
功能码与资料内容:03H:读出资料内容,06H:写一笔资料至寄存器,06H:回路侦测,10H : 写入多笔资料至寄存器。
2.读寄存器内容:例:对01H读出两个连续于寄存器内的资料内容如下表示变频器应答:3.写一笔资料至寄存器。
对驱动器地址01H写入6000 (1770H)至驱动器内部0100H变频器应答:4.通讯回路测试,驱动器将所受资料原封不动送回给主控设备变频器应答:5. 参数字地址定义:(1) 对驱动器的命令:2000HBIT0~1 : 00 无功能,01 停止,10 启动,11 JOG 启动BIT2~3 : 保留BIT4~5 : 00 无功能,01 正方向指令,10 反方向指令,11 改变方向指令BIT6~7 : 00 第一段加减速,01 第二段加减速,10 第三段加减速,11 第四段加减速BIT8~11 : 0000 主速,0001 第一加减速,0010 第二段加减速,0011 第三段加减速0100 第四段加减速,0101 第五段加减速,0110 第六段加减速,0111 第七段加减速1000 第八段加减速,1001 第九段加减速,1010第十段加减速,1011第"一段加减速1100第十二段加减速1101第十三段加减速1110 第十四段加减速11 第十五段加减速BIT12 : 选择BIT6~11 功能BIT13~15 保留(2) 对频率的命令:2001H6. VFD 勺通讯参数设置。
变频器 CanOpen 通信卡说明书
10P-0007 CanOpenCommunication CardTo be used with AC10P Series InverterProduct ManualIssue 12016 Parker Hannifin Manufacturing Ltd.All rights strictly reserved. No part of this document may be stored in a retrieval system, or transmitted in any form or by any means to persons not employed by a Parker SSD Drives company without written permission from Parker Automation Wuxi, a division of Parker Hannifin Ltd . Although every effort has been taken to ensure the accuracy of this document it may be necessary, without notice, to make amendments or correct omissions. Parker Automation Wuxi cannot accept responsibility for damage, injury, or expenses resulting therefrom.WARRANTYRefer to Parker Hannifin Manufacturing Limited Terms and Conditions of Sale. These documents are available on request at /ADC. Parker Hannifin Manufacturing Limited reserves the right to change the content and product specification without notice.变频CANOPEN说明书 (1)I.INTRODUCTION (3)1.1.CAN OPEN (3)1.2.I NSTALLA TION (3)1.3.DB15INTERFACE PINS (3)1.4.CAN–BUS CONNECTION (4)1.5.H ARDWARE LAYOUT (5)1.6.LED INDICA TOR (5)1.7.S WITCH CODE (5)1.8.I NTERFACE (6)II.OPERATION GUIDE (6)2.1B AUD RA TE (6)2.2A DDRESS AND BAUD RA TE SETTING (6)2.3P ARAMETERS SETTING (7)2.4P ROTOCOL (7)2.5NMT CONTROL DEMAND (8)2.6N ODE PROTECTION FUNCTION (8)2.7S ERVICE DATA OBJECT (SDO) (8)2.7.1 Demand format of master station reading slave station (9)2.7.2 Node response when master station reads command (9)2.7.3 command format of master station writing parameters (11)2.7.4从节点响应主站写入数据命令 (11)2.8PDO (13)2.8.1节点进行对象字典的编写 (14)2.8.2节点的TPDO通讯参数在对象字典中的定义 (14)III.运行模式 (15)3.1速度模式(P ROFILE V ELOCITY M ODE) (15)3.1.1 控制字(ControlWord) (15)3.1.2状态字(StatusWord) (16)3.1.3其他速度模式的相关参数 (17)I.Introduction1.1.CANopenCANopen is a high layer protocol which bases on CAN serial bus system and CAL(CAN application layer). The communication card is used to connect inverter to CAN network.1.2.InstallationCommunication cableFig 2-1 CANopen card installation1.3.DB15interface pinsFig 2-2 interface pins1.4.CAN –bus connection1.5.Hardware layoutFig 2-2 CANopen bus card 1.6.LED indicatorColorGreenGreenGreenRed1.7.Switch code1.8.InterfaceII.Operation guide2.1Baud rate1Mbit/s 500kbit/s25m 100m2.2Address and baud rate setting16 bits switch code of SW4 and SW5 are used to set baud rate and communication device2.3Parameters setting2.4ProtocolIn CAN network, communication objects are used to transfer data. Periodic data object uses PDO to transfer real time data (control command, given value and status information). Service data object uses SDO to transfer non-real time data (parameters). The COB-ID related to variable data is as below:NMT object: 0x000;RPDO object: 0x200+NODE-IDTPDO object: 0x180+NODE-IDTSDO object: 0x600+NODE-IDRSDO object: 0x580+NODE-IDSYNC object: 0x0802.5NMT control demandNMT control demand is sent from master station, slave station does not need to reply. The format of NMT is as below:2.6Node protection functionNMT main node can check the current state of each node by node protection service.NMT-Master node sends remote frame (no data) is as below:NMT-Slave node sends the below messageThe data includes a trigger bit (bit7), trigger bit must be set to “0” or “1 alternately when node protection response. Trigger bit must be set to “0” when node protection request. Bit 0 ~ bit 6 means2.7Service data object (SDO)SDO can visit the item in the dictionary of device object. SDO can send any length data (when the data is more than 4 bytes, it should be divided into several messages). Master node will read or write slave node object dictionary by SDO communication, to set slave node parameters, download program, define communication type and data format of PDO.2.7.1 Demand format of master station reading slave station2.7.2Node response when master station reads commandif it reads successfully, node 2 returns to the below contents:Table 3-1 Command format of node responseNote: d0,d1,d2 and d3 are the data which need to be transferred.For example, if node 2 returns to 582 4F 00 60 01 FD 00 00 00, which meaning is as below:5824F00 6001 FD 00 00 00Transfer dataSub-indexIndex1 byteRead SDONode No.Send SDOThe index of node 1 reading from node 2 object dictionary is 0x6000, the sub-index is 0x01. It is FD 00 00 00.if read failed, node 2 returns to failed information.The format is as below:Note: SDO abort code error will return to related parameters according to different error. Please refer to Appendix 1.2.7.3 Command format of master station writing parametersThe format of master writing data is as below tableFor example, node 1 will transfer 603 2F 00 70 01 FD 00 00 00 , the meaning is as blow: 6032F00 7001 FD 00 00 00Transfer dataSub-indexIndex1 byteRead SDONode No.Send SDONode 1 will write the data FD 00 00 00 to the entry of node 3 object dictionary, which index is 7000h, and sub-index is 01h.2.7.4Slave response after master writes dataif writing succeeds, node 3 will return writing success command to node 1. The format is as below:if writing failed, node will return to failed command, the format is as below:,Note: SDO abort code error will return to related parameters according to different error.Please refer to Appendix 1.Appendix 1 SDO abort code error2.8PDOPDO通信是基于生产者/消费者(Producer/Consumer)模型,主要用于传输实时数据。
西门子与台达变频器通讯

西门子与台达变频器通讯ORGANIZA TION_BLOCK 主程序:OB1TITLE=实现S7-200 PLC与台达变频器通信// 实现功能是PLC通过RS485通信控制变频器的正转启动、反转启动、停止、加速、减速和读取输出频率。
变频器通过Modbus通信方式进行// 要求台达变频器设置基本通信参数:// P00=d03(主频率由RS485控制)// P01=d03(运转/停止由RS485通信控制)// P88=d01(站点定义为1号站)// P90=d00 P91=d00 P92=d02 P113=d01// (其他参数都是出厂默认值,可根据实际情况调节)//BEGINNetwork 1LD SM0.1CALL SBR0Network 2 // 正转启动命令LD M10.0EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#31, VB112MOVB 16#32, VB113CALL SBR1Network 3 // 反转启动指令LD M10.1EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#32, VB112MOVB 16#32, VB113CALL SBR1Network 4 // 停止指令LD M10.2EUMOVB 16#30, VB104MOVB 16#36, VB105MOVB 16#32, VB106MOVB 16#30, VB107MOVB 16#30, VB108MOVB 16#30, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113CALL SBR1Network 5 // 1秒脉冲LDN T37TON T37, 10Network 6 // 加速指令(每1秒步进加速0.01Hz)LD M10.3A T37INCW VW135Network 7 // 减速指令(每1秒步进减速0.01Hz)LD M10.4A T37DECW VW135Network 8 // 上限频率50.00HzLDW>= VW135, 5000MOVW 5000, VW135Network 9 // 下限频率0.1HzLDW<= VW135, 10MOVW 10, VW135Network 10 // 凡有频率改变,调用子程序3 LDW<> VW135, VW145O SM0.1CALL SBR3Network 11 // 读取输出频率指令LD M10.5EUMOVB 16#30, VB104MOVB 16#33, VB105MOVB 16#32, VB106MOVB 16#31, VB107MOVB 16#30, VB108MOVB 16#33, VB109MOVB 16#30, VB110MOVB 16#30, VB111MOVB 16#30, VB112MOVB 16#31, VB113S M20.0, 1CALL SBR1Network 12 // 当读取频率时,执行频率显示运算子程序LD SM4.5A M20.1CALL SBR2Network 13 // SMB86=0表示正在接收,但本例是利用中断来接收LDB<> SMB86, 0MOVB SMB86, VB400Network 14 // 发送完成标志LD SM4.5= Q0.0END_ORGANIZA TION_BLOCKSUBROUTINE_BLOCK SBR_0:SBR0TITLE=通信初始化参数子程序BEGINNetwork 1 // 初始化通信参数及定义开始符、终止符等接收信息LD SM0.0MOVB 16#69, SMB30MOVB 16#E0, SMB88MOVB 16#3A, SMB89MOVB 18, SMB94Network 2 // 初始化固定参数LD SM0.0MOVB 16#3A, VB101MOVB 16#30, VB102MOVB 16#31, VB103MOVB 16#0D, VB116MOVB 16#0A, VB117Network 3 // 声明使用发送完成中断LD SM0.0A TCH INT0, 9ENIEND_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_1:SBR1TITLE=计算校验及子程序BEGINNetwork 1 // 建立指针及参数清零等初始化LD SM0.0MOVD &VB101, VD131MOVW 0, VW129MOVW 6, VW127MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3Network 2 // 循环计算原始累加和LD SM0.0FOR VW125, 1, VW127 Network 3LD SM0.0LPSMOVW *VD131, AC0ANDW 16#FF, AC0AB> AC0, 16#39MOVW AC0, AC1-I 16#37, AC1LRDAB<= AC0, 16#39MOVW AC0, AC1-I 16#30, AC1LRDINCD VD131LRDMOVW *VD131, AC0ANDW 16#FF, AC0LRDAB> AC0, 16#39MOVW AC0, AC2-I 16#37, AC2LRDAB<= AC0, 16#30MOVW AC0, AC2-I 16#30, AC2LRDSLB AC1, 4LRDMOVW AC1, AC3+I AC2, AC3LRD+I AC3, VW129LPP+D 1, VD131Network 4NEXTNetwork 5 // 指针加一,指向下一个LD SM0.0MOVW 0, AC2MOVW 0, AC3+D 1, VD131Network 6LD SM0.0LPSMOVW 16#FF, AC0ANDW VW129, AC0INVW AC0MOVW 1, VW800+I AC0, VW800MOVB VB801, AC2SRB AC2, 4A W> AC2, 9+I 16#37, AC2LRDMOVB AC2, *VD131LRD+D 1, VD131LRDMOVB VB801, AC3ANDB 16#0F, AC3LRDA W> AC3, 9+I 16#37, AC3LRDA W<= AC3, 9+I 16#30, AC3LPPMOVB AC3, *VD131Network 7 // 发送前,强行禁止接收LD SM0.0MOVB 16#70, SMB87RCV VB200, 0Network 8 // 开始发送LD SM0.0MOVB 17, VB100XMT VB100, 0FILL 0, VW200, 9Network 9 // 发送后允许接收LD SM0.0MOVB 16#F0, SMB87END_SUBROUTINE_BLOCKSUBROUTINE_BLOCK SBR_2:SBR2TITLE=频率显示运算子程序V ARLIN1:DWORD;lLIN2:DWORD;LIN3:DWORD;LIN4:DWORD;END_V ARBEGINNetwork 1 // 把接收到的16进制ASCII码信息,转换成习惯的小数点形式LD SM0.0BTI VB2008, LW0BTI VB2009, LW2BTI VB2010, LW4BTI VB2011, LW6Network 2LD SM0.0LPSA W> LW0, 16#40MOVW LW0, AC0-I 16#37, AC0LPPA W< LW0, 16#40MOVW LW0, AC0-I 16#30, AC0Network 3LD SM0.0LPSA W> LW2, 16#40MOVW LW2, AC1-I 16#37, AC1LPPA W< LW2, 16#40MOVW LW2, AC1-I 16#30, AC1Network 4LD SM0.0LPSA W> LW4, 16#40MOVW LW4, AC2-I 16#37, AC2LPPA W< LW4, 16#40MOVW LW4, AC2-I 16#30, AC2Network 5LD SM0.0LPSA W> LW6, 16#40MOVW LW6, AC3-I 16#37, AC3LPPA W< LW6, 16#40MOVW LW6, AC3-I 16#30, AC3Network 6LD SM0.0MOVB AC0, LB8SLB LB8, 4MOVB AC2, LB9SLB LB9, 4Network 7LD SM0.0MOVB LB8, VB3200ORB AC1, VB3200Network 8LD SM0.0MOVB LB9, VB3201ORB AC3, VB3201Network 9LD SM0.0ITD VW3200, VD3300DTR VD3300, VD3304MOVR VD3304, VD3308/R 100.0, VD3308Network 10LD SM0.0R M20.1, 1END_SUBROUTINE_BLOCK SUBROUTINE_BLOCK SBR_3:SBR3 TITLE=输出频率通信格式整理子程序BEGINNetwork 1 // 凡是有输出频率,频率改变LD SM0.0MOVB 16#30, VB104 MOVB 16#36, VB105 MOVB 16#32, VB106 MOVB 16#30, VB107 MOVB 16#30, VB108 MOVB 16#31, VB109 MOVW VW135, VW137 MOVW 0, AC0MOVW 0, AC1MOVW 0, AC2MOVW 0, AC3 Network 2LD SM0.0LPSMOVB VB137, AC0 ANDB 16#0F, AC0A W> AC0, 9+I 16#37, AC0LRDA W<= AC0, 9+I 16#30, AC0LRDITB AC0, VB111LRDMOVB VB138, AC1 ANDB 16#0F, AC1 LRDA W> AC1, 9+I 16#37, AC1LRDA W<= AC1, 9+I 16#30, AC1LPPITB AC1, VB113 Network 3LD SM0.0LPSMOVW VW137, VW139 SRW VW139, 4 MOVB VB139, AC2 ANDB 16#0F, AC2A W> AC2, 9+I 16#37, AC2LRDA W<= AC2, 9+I 16#30, AC2LRDITB AC2, VB110LRDMOVB VB140, AC3ANDB 16#0F, AC3LRDA W> AC3, 9+I 16#37, AC3LRDA W<= AC3, 9+I 16#30, AC3LRDITB AC3, VB112LRDMOVW VW135, VW145LPPCALL SBR1END_SUBROUTINE_BLOCK INTERRUPT_BLOCK INT_0:INT0TITLE=发送完成中断程序BEGINNetwork 1 // 除读取频率其他指令返回信息LD M20.0RCV VB200, 0Network 2 // 读取频率返回信息LD M20.0RCV VB2000, 0S M20.1, 1R M20.0, 1END_INTERRUPT_BLOCK。
台达工控产品CANopen解决方案

台达工控产品CANopen解决方案台达工业自动化应用技术中心左涛摘要:本文主要阐述台达工控产品CANopen解决方案,从而展示出台达工控产品在现代总线技术中良好的兼容特性。
Abstract: In this paper, the solution in CANopen for Delta industrial products is presented, which displays the nice compatibility in the modern field-bus control.1、引言CANopen是一种架构在控制器区域网络(Controller Area Network, CAN)上的高层通讯协定,包括通讯子协定及设备子协定,其处理芯片采用同步或异步通讯方式,可实现一定范围内的同步通讯控制,并减少无谓的数据重复发送,其通讯速率可达到1M bps,在节约资源的同时有利实现工控运动控制特性,是当前工业自动化最为常见的总线技术之一。
2、台达工控产品在CANopen中的应用2.1支持CANopen之台达工控产品分类当前台达工控产品可分为驱动类、控制类和运动控制类。
其中,驱动类主要为变频器和不具备运动控制功能的伺服驱动器,而控制类主要有触摸屏、PLC,运动控制类有A2伺服、20PM以及10MC。
当前,这些产品在CANopen较常见的为驱动类和控制类以及A2伺服,而20PM可支持CANopen扩展卡但是其主要特色在于实现运动控制G代码和电子凸轮,在DS402标准CANopen运用20PM的优劣仍不明显,因此暂不做分析。
同理10MC仍在测试中,因此也不考虑。
本文介绍的台达工控产品均为成熟的并有在CANopen应用中的价值体现的产品。
其汇总如下:图1 台达支持CANopen之工控产品总汇图1中,需要特别重视的产品有DVPCOPM-SL、C2000、E-C以及A2伺服。
A.DVPCOPM-SL具备特性为:●CANopen通讯主站,可连接127个站点;●最快通讯速率达到1M bps;●最长的网络长度可支持1000m(配合合适的通讯速率和物理线材);●具有同步和异步的通讯能力;B.C2000具备的特性为:●支持CANopen主站连接(仍在测试中);●CANopen通讯直接连接无需转换;●最快通讯速率达到1M bps;●By Pass连接功能(搭配外部扩展卡);C.A2具备的特性为:●最快通讯速率达到1M bps;●CANopen通讯直接连接无需转换;●无需外部扩展卡,完全内建;●By pass 连接功能;D.E-C具备的特性为:●最快通讯速度达到1M bps;●CANopen通讯直接连接无需转换;●无需外部扩展卡,完全内建;可以看出,台达工控产品中,真正能实现CANopen直接通讯的非控制类产品目前为C2000变频器、A2伺服驱动器以及E-C变频器,之所以称为直接通讯是因为其无需通讯模式的转换,而直接采用CANopen物理连接。
1 SI CANopen模块与台达变频器通信测试
Page 13
Connecting Devices™
实验1-1:设置1 SI CANopen模块参数
• 双击1 SI CANopen 32byte ,在“参数”中设置设置CANopen Master的地 址、波特率,以及输入/输出参数等,如下图所示:
Page 14
Connecting Devices™
2013-10
Connecting Devices™
应用背景与实验环境
• 台达(Delta)C200系列型号为VFD037CB23A-20的CANopen接口变频器 (以下简称VFD),其无法直接与西门子PLC(无CANopen接口)系统通 信,因此可以将HMS的1 SI CANopen模块插入带有DP从站接口的西门子ET 200S分布式I/O系统,通过ET200S实现CANopen设备与Profibus 主站PLC通 信。
6. 为简单起见,实验中只接了一台变频器,实际可以挂接多台。
注意:CAN_H与CAN_L不要接反,同时在两端各跨接一个120Ω的终端电阻,将 适配器的USB端接电脑。
Page 4
Connecting Devices™
实验目录
• • • 实验1:1 SI CANopen与VFD进行PDO数据通信 实验2:PLC通过SDO读/写VFD参数 实验3:在PLC中上传/下载1 SI CANopen master配置
Page 23
Connecting Devices™
实验1-2: CANopen侧的配置
• 通过上述映射,节点1(网关)通过一个PDO将两个Word自数据输出缓冲区发 送至节点2对应参数(VFD),PDO的COB-ID为0x202,发送模式为255,即
PDO中数据逢变则发。映射完毕后网关内存分配如下:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
网关数据输出缓冲区(byte 1 ~ byte 1024)
Transmit Byte 1 Transmit Byte 2 Transmit Byte 3 Transmit Byte 4 Transmit Byte 5 Transmit Word 1 Transmit Long 1 Transmit Word 2 Transmit Word 3 Transmit Long 2 Transmit Word 4
2013-10
Connecting Devices™
应用背景与实验环境
• 台达(Delta)C200系列型号为VFD037CB23A-20的CANopen接口变频器 (以下简称VFD),其无法直接与西门子PLC(无CANopen接口)系统通 信,因此可以将HMS的1 SI CANopen模块插入带有DP从站接口的西门子ET 200S分布式I/O系统,通过ET200S实现CANopen设备与Profibus 主站PLC通 信。
Transmit Transmit Transmit Transmit Transmit Transmit Transmit
Byte Byte Byte Byte Byte Byte Byte
6 7 8 9 10 11 12
Page 6
Connecting Devices™
实验1:1 SI CANopen与VFD进行PDO数据通信
• 1.3 实验步骤 实验1主要分4个步骤,如下所示:
1. STEP 7中1 SI CANopen组态;
2. 利用HMS提供的CANopen配置软件进行CANopen网络组态; 3. S7 300与VFD的数据通信测试; 4. 大数据量Fragmented I/O通信。
Connecting Devices™
实验1-1:硬件列表中添加1 SI CANopen模块
• 安装成功后,在Step7中的ET 200S里,可以看到1M151-1 Standard Special Modules中出现1 SI CANopen 16byte,1 SI CANopen 32byte,等等。
即令节点1监视节点2所发的每2000ms一次的心跳报文,如果3000ms没收
到,则认为节点2出现故障。当然同样也可以设置节点2监视节点1。
Page 22
Connecting Devices™
实验1-2: CANopen侧的配置
• 点击PDO Mapping后按下图进行PDO映射,配置网关需要通过PDO发送给 VFD的参数。
实验1-1:编译、下载配置,并在线查看
• 将配置编译、下载后选择Online,双击ET 200S模块,弹出如下对话框, 并显示“ 模块可用且正常” 。这表明ET 200S模块与PLC通信正常。
•
至此,已完成在PLC中的硬件组态。
Page 15
Coen网络配置
After mapping
网关数据输出缓冲区(byte1~ byte 1024)
Transmit Byte 1 Transmit Byte 2 Transmit Byte 3 Transmit Byte 4 Transmit Byte 5 Control word[6040,00] vl target velocity[6042,00] Transmit Word 3 Transmit Long 2 Transmit Word 4 Transmit Word 5 Transmit Long 3 Transmit Word 6 Transmit Long 1
Page 7
Connecting Devices™
实验1-1:STEP 7中1 SI CANopen组态参数
• 通过Step 7可以设置1 SI CANopen模块的参数,本实验中参数设置如下所 示:
• 组诊断:None
• 节点号:1 • 主/从:主
• 波特率:500k
• 处理数据模式:标准 • CANopen输入数据大小:20 • CANopen输出数据大小:20 • 由于ET 200S背板I/O总线数据宽度最大为32个字节,所以如果1 SI CANopen所连接的从站较多而总数据超过32个字节,则需要使用分段传输 方式(Fragment),请参考实验1-4。
实验报告
Presented by:
1 SI CANopen模块与台达变频器通信测试
薛立明
Technical Support Engineer
HMS Industrial Networks AB Beijing Rep. Office
xlm@hms.se Phone:+86(0)10-8532 3023
Page 19
Connecting Devices™
实验1-2: CANopen侧的配置
• 点击Scan Network图标 ,扫描CANopen网络上的所有节点,扫描到的节
点如果和导入的EDS文件对应将会呈现绿色外框。如果用户不具备连接设备
进行在线配置的条件,也可手动从左侧添加设备作离线配置。
Page 20
• 建立Step 7 工程,更新Step 7中catalog,PROFIBUD DP中ET 200S的 Module信息。(上的HSP 2066 Profibus/Profinet
Configuration File),以便正确组态1 SI CANopen模块。
Page 10
• CANopen的网络配置使用Anybus Configuration Manager – CANopen软件;
•
•
通过USB/CAN适配器连接到CANopen网络上;
实验操作如下:
通过PDO改变台达变频器的
• Object 0x6040 Control word • Object 0x6042 vl target velocity
6. 为简单起见,实验中只接了一台变频器,实际可以挂接多台。
注意:CAN_H与CAN_L不要接反,同时在两端各跨接一个120Ω的终端电阻,将 适配器的USB端接电脑。
Page 4
Connecting Devices™
实验目录
• • • 实验1:1 SI CANopen与VFD进行PDO数据通信 实验2:PLC通过SDO读/写VFD参数 实验3:在PLC中上传/下载1 SI CANopen master配置
Page 3
Connecting Devices™
应用背景与实验环境
3. ET 200S另外一侧作为Profibus从站接入西门子S7 300 PLC,从而实现VFD与 PLC的数据交换;
4. 计算机通过以太网与西门子S7 300 PLC相连,用于Step7下的组态配置和下载;
5. 计算机通过HMS提供的USB转CAN适配器接入CANopen网络,用于CANopen 网络配置和下载;
Page 5
Connecting Devices™
实验1:1 SI CANopen与VFD进行PDO数据通信
• 1.1 实验目的 1. 熟悉Anybus Configuration Manager – CANopen的使用方法;
2. 掌握在STEP 7中对1 SI CANopen的配置方法;
3. 掌握在大数据量通信时使用Fragmented I/O的方法。 • 1.2 实验设备 1. 1 SI CANopen模块; 2. ET200S分布式I/O系统; 3. 西门子S7 300PLC ; 4. VFD变频器; 5. IXXAT USB-to-CAN compact; 6. 计算机; 7. CANopen电缆、网线、Profibus DP电缆。
可以点击Tools Repository添加自己所连接CANopen从站的EDS文件。
Page 17
Connecting Devices™
实验1-2: CANopen侧的配置
• 选择VFD所对应的正确的EDS文件,HMS配置软件会根据CANopen规范对 导入的EDS文件作检查,如果出现错误,需要修改EDS文件更改错误后才能
通过PDO读取台达变频器的
• Object 0x6041 Status Word
Page 16
Connecting Devices™
实验1-2: CANopen侧的配置
• 打开软件“Anybus Configuration Manager - CANopen”。点击FileNew,新 建一个工程。左侧是预安装的HMS的CANopen产品EDS文件列表,用户也
导入。
Page 18
Connecting Devices™
实验1-2: CANopen侧的配置
• 点击OnlineSelect Connection,在弹出的窗口中选择Config,选中所使用 的适配器,设置CANopen网络的波特率,完成后点击OK。然后点击Connect
图标
,完成软件与CANopen网络的连接。
Page 2
Connecting Devices™
应用背景与实验环境
• 本实验系统连接如下图所示:
1. 将1 SI CANopen模块插入ET 200S分布式I/O系统中,使ET200S扩展出 CANopen功能和接口; 2. 将1 SI CANopen通过CANopen线缆与目标设备VFD相连,使CANopen设 备间可以通信;
Connecting Devices™
实验1-1:硬件列表中添加1 SI CANopen模块
• 选择Copy from disk, 点击Execute, 选择HSP_2066_V_1_0中的文件。再点 击Install, 最后安装完成后,提示Installed successfully。
Page 11
Page 13
Connecting Devices™