字符设备驱动程序
platform模型驱动和字符设备模型驱动
platform模型驱动和字符设备模型驱动字符设备驱动模型:1、申请设备号:动态申请(alloc_chrdev_region()),动态申请(register_chrdev_region())struct cdev btn_cdev;//申请设备号if(major){//静态申请设备号dev_id = MKDEV(major, 0);register_chrdev_region(dev_id, 1, "button");}else{//动态申请设备号alloc_chardev_region(&dev_id, 0, 1, "button");major = MAJOR(dev_id);}在Linux中以主设备号用来标识与设备文件相连的驱动程序。
次编号被驱动程序用来辨别操作的是哪个设备。
cdev 结构体的 dev_t 成员定义了设备号,为 32 位,其中高 12 位为主设备号,低20 位为次设备号。
设备号的获得与生成:获得:主设备号:MAJOR(dev_t dev);次设备号:MINOR(dev_t dev);生成:MKDEV(int major,int minor);2、初始化设备:void cdev_init(struct cdev *, struct file_operations *);cdev_init()函数用于初始化cdev 的成员,并建立cdev 和file_operations 之间的连接。
3、注册设备int cdev_add(struct cdev *, dev_t, unsigned);cdev_add()函数向系统添加一个 cdev,完成字符设备的注册。
4、创建设备节点手动创建设备节点:mknod 的标准形式为:mknod DEVNAME {b | c} MAJOR MINOR1,DEVNAME是要创建的设备文件名,如果想将设备文件放在一个特定的文件夹下,就需要先用mkdir在dev目录下新建一个目录;2, b和c 分别表示块设备和字符设备:b表示系统从块设备中读取数据的时候,直接从内存的buffer中读取数据,而不经过磁盘;c表示字符设备文件与设备传送数据的时候是以字符的形式传送,一次传送一个字符,比如打印机、终端都是以字符的形式传送数据;3,MAJOR和MINOR分别表示主设备号和次设备号:为了管理设备,系统为每个设备分配一个编号,一个设备号由主设备号和次设备号组成。
VxWorks下字符设备的驱动开发
( 国飞 行 试 验 研究 院 , 西 西 安 7 0 8 ) 中 陕 10 9
摘 要 : 着 V W o k 操 作 系统 在 嵌入 式 系统 中的应 用 , x ok 下 产 品 的 开发 和 应 用也 越 来 越 广 泛 。 发 嵌 入 式 设备 经 常遇 到 的 一 随 x rs V W rs 开
Ab ta t s r c :W ih t W or sopeai yse n mbe de yse .Vx or de h r uc e l p e n a pl ai s r n c he Vx k rt ng s t m i e d d s tm W ksun rt e p od td veo m nta d p i ton ae i — c c e sn l wi epr a r aigy d s e d.D e l pm e t o m be de v c s i o l m o n nc un e e n w t w rt f ce t nd r l be de ie veo n fe d d de i e s a pr b e e e o t r d i ho o i e e in a ei l vc i a drv m.I t sp pe .VxW o k e c rve v l pm e tu i e n hi a r r sd vie d i rde eo n nde h an ape t a rt e m i s cs nd how O c fg e t t on ur he PCIb e i e r s rb d i usd v c sae dec e i i d ti f rt ee ntde l pesago ee e c n eal o he rlva veo r od r fr n e. Ke y wor :Vx or s ha a trde i e rve veo ds W k ;c rce v c ;d i rde l pm e t n ;PCIde c ;slc u t vie ee tf nc on i
设备驱动程序简介
设备驱动程序简介1.设备驱动程序的作⽤从⼀个⾓度看,设备驱动程序的作⽤在于提供机制,⽽不是策略。
在编写驱动程序时,程序猿应该特别注意以下这个基本概念:编写訪问硬件的内核代码时,不要给⽤户强加不论什么特定策略。
由于不同的⽤户有不同的需求,驱动程序应该处理如何使硬件可⽤的问题。
⽽将如何使⽤硬件的问题留给上层应⽤程序。
从还有⼀个⾓度来看驱动程序。
它还能够看作是应⽤程序和实际设备之间的⼀个软件层。
总的来说,驱动程序设计主要还是综合考虑以下三个⽅⾯的因素:提供给⽤户尽量多的选项、编写驱动程序要占⽤的时间以及尽量保持程序简单⽽不⾄于错误丛⽣。
2.内核功能划分Unix系统⽀持多进程并发执⾏。
每⼀个进程都请求系统资源。
内核负责处理全部这些请求,依据内核完毕任务的不同,可将内核功能分为例如以下⼏部分:1.进程管理:负责创建和销魂进程。
并处理它们和外部世界之间的连接。
内核进程管理活动就是在单个或多个CPU上实现了多个进程的抽象。
2.内存管理:内存是计算机的主要资源之中的⼀个,⽤来管理内存的策略是决定系统系能的⼀个关键因素。
3.⽂件系统:内核在没有结构的硬件上构造结构化的⽂件系统。
⽽⽂件抽象在整个系统中⼴泛使⽤。
4.设备控制:差点⼉每个系统操作终于都会映射到物理设备上。
5.⽹络功能:⽹络功能也必须由操作系统来管理,系统负责在应⽤程序和⽹络接⼝之间传递数据包,并依据⽹络活动控制程序的运⾏。
全部的路由和地址解析问题都由内核处理。
可装载模块:Linux有⼀个⾮常好的特性:内核提供的特性可在执⾏时进⾏扩展。
可在执⾏时加⼊到内核的代码被称为“模块”。
Linux内核⽀持⼏种模块类型。
包含但不限于设备驱动程序。
每⼀个模块由⽬标代码组成,能够使⽤insmod程序将模块连接到正在执⾏的内核,也能够使⽤rmmod程序移除连接。
3.设备和模块的分类Linux系统将设备分成三个基本类型:字符设备、块设备、⽹络接⼝。
1.字符设备:字符设备驱动程序通常⾄少要实现open、close、read和write系统调⽤。
C语言设备驱动编程入门

C语言设备驱动编程入门C语言设备驱动编程是一项常见的技术,用于编写操作系统的设备驱动程序。
设备驱动程序是操作系统与硬件设备之间的桥梁,它负责将用户操作转化为硬件设备能够理解和执行的指令。
本文将介绍C语言设备驱动编程的基本概念和入门知识,帮助读者了解并入门这一重要的编程技术。
一、设备驱动程序概述设备驱动程序是操作系统的一部分,它与操作系统内核紧密结合,用于实现对硬件设备的控制和管理。
设备驱动程序通常由硬件设备制造商提供,或者由操作系统开发者开发。
它负责处理硬件设备与操作系统之间的通信,使得用户能够方便地操作硬件设备。
设备驱动程序可以分为字符设备驱动和块设备驱动两种类型。
字符设备驱动用于处理流式数据的设备,如键盘、鼠标等;块设备驱动用于处理以块为单位的数据的设备,如硬盘、U盘等。
不同类型的设备驱动程序在实现上有所不同,但都需要用C语言编写。
二、设备驱动程序的基本结构设备驱动程序的基本结构包括设备初始化、设备打开、设备关闭和设备读写等函数。
下面我们逐步介绍这些函数的作用和实现方法。
1. 设备初始化函数设备初始化函数负责对设备进行初始化,包括设备的寄存器配置、中断设置等。
在这个函数中,我们需要了解硬件设备的相关规格和特性,并根据需要进行适当的配置。
2. 设备打开函数设备打开函数在设备被用户程序打开时被调用,它负责向操作系统申请资源,并进行相应的设置,例如打开文件、分配内存等。
3. 设备关闭函数设备关闭函数在设备被用户程序关闭时被调用,它负责释放设备所占用的资源,如释放文件占用的内存、关闭文件等。
4. 设备读写函数设备读写函数是设备驱动程序的核心部分,它负责设备与用户程序之间的数据交换。
设备读函数用于从设备中读取数据,设备写函数用于向设备中写入数据。
三、设备驱动程序的编写步骤编写设备驱动程序需要经过以下几个步骤:1. 了解硬件设备在编写设备驱动程序之前,我们需要详细了解硬件设备的规格和特性,包括硬件寄存器的地址、中断向量等。
块、字符、网络设备

write等。
指令 用途
# 空指令,无任何效果
#include 包含一个源代码文件
#define 定义宏
区特性的字符设备,访问它们时可前后移动访问位置。例如framebuffer就是这样的一个设
备,app可以用mmap或lseek访问抓取的整个图像。
块设备:
和字符设备类似,块设备也是通过/dev目录下的文件系统节点来访问。块设备(例如磁盘)
上能够容纳filesystem。在大多数的Unix系统中,进行I/O操作时块设备每次只能传输一个
用。字符终端(/dev/console)和串口(/dev/ttyS0以及类似设备)就是两个字符设备,
它们能很好的说明“流”这种抽象概念。字符设备可以通过FS节点来访问,比如/dev/tty1
和/dev/lp0等。这些设备文件和普通文件之间的唯一差别在于对普通文件的访问可以前后
移动访问位置,而大多数字符备是一个只能顺序访问的数据通道。然而,也存在具有数据
或多个完整的块,而每块包含512字节(或2的更高次幂字节的数据)。Linux可以让app像
字符设备一样地读写块设备,允许一次传递任意多字节的数据。因此,块设备和字符设备的
区别仅仅在于内核内部管理数据的方式,也就是内核及驱动程序之间的软件接口,而这些不
同对用户来讲是透明的。在内核中,和字符驱动程序相比,块驱动程序具有完全不同的接口。
#undef 取消已定义的宏
#if 如果给定条件为真,则编译下面代码
#ifdef 如果宏已经定义,则编译下面代码
#ifndef 如果宏没有定义,则编译下面代码
嵌入式Linux系统中字符设备驱动程序的开发
[ sr c!C mbnd w t ted vlp n fA d vro 3 41F b ad hspp rmany daswi eb i igo rs c mpl Abta t o ie i h eeo me to D r e f¥ C2 0 or,ti ae il el t t ul n fcos o i h i hh d e
实现、调试和 发布 方法进行 了详细的论述 。
关羹词 :嵌入式 系统 ;数据采 集 ;AD转换 ;驱动程序 /
De eo m e t f v lp n a v c i e so b d e y t m o Ch rDe ieDr v r f Em e d d S se Un e n x S se d rLi u y t m
中圈分类号: P9. T31 9
嵌入 式 Ln x系统 中字符设备 驱动程 序 的开发 iu
李胜朝 ,黄先祥 ,谢 建
( 第二炮兵工程学院二 系 ,西 安 7 0 2 ) 10 5
接
要: 结合嵌入式开 发板 ¥ C 40 3 2 1F的模数转换驱动程序 的开发 ,该文对 Lnx i 环境下交叉编译环境的建立 , u 字符设备驱动程序 的组成、
其它 文件一样对 此设备 文件进行 操作。Ln x系统驱动主要 iu
由字符设备、块设备和 网络设备的驱动程序组成 ,其 中字符 设备如 I / O、A / A设备和 US DD B设备 等应用最为广泛,下面 结合 2 1F开发板 中 A 40 D转换设备的驱动开发,对字符设备
的驱 动 开 发 流 程 进 行 深 入 讨 论 。
() 3通过 stp命 令选 配好主机 的 NF e u S功能 ,并建立一 NF 根 目录/fro, ec x ot文件中添]1 fro (wn S ns t t e p r o 在/ / s J/ s t r ,o [n o
添加简单的字符设备教程

编写简单的字符设备的驱动由于用户进程是通过设备文件同硬件打交道,对设备文件的操作方式不外乎就是一些系统调用,如open,read,write,close....而这些系统调用通过定义struct file_operations结构体和设备驱动程序相关联。
所以,编写设备驱动程序的主要工作就是编写子函数,并填充file_operations 的各个域。
具体步骤如下:①随便在一个目录下,新建一个目录叫mydev ,再在此目录下新建三个文件分别叫Makefile mydev.c main.c。
其中Makefile是编译文件,mydev.c是我们编写的字符设备驱动程序,main.c则是用于测试字符设备驱动的测试程序。
三个文件的源程序代码详见附录2.②打开终端使用su 命令,切换到super user 身份,然后写位到mydev 目录下。
③输入make 命令,编译驱动程序chardev.c。
④输入gcc main.c 命令,编译测试程序。
⑤输入insmod mydev.ko 加载驱动模块。
⑥输入gedit /proc/devices 查看mydev 驱动模块的主设备号。
⑦输入mknod /dev/mydev c 250 0 在/dev/目录下,创建设备mydev。
其中,c代码字符驱动,250是驱动主设备号,0是次设备号。
次设备号一般都为0。
⑧输入./a.out 运行测试程序。
⑨测试程序退出后,输入rmmod mydev 卸载驱动模块,并输入rm -rf /dev/mydev 删除/dev/目录下的mydev 设备。
其安装过程和运行结果如图3-1~图3-3所示。
图3-1 查看驱动模块主设备号图3-2 创建mydev源代码:Makefileobj-m:=mydev.oKDIR:=/lib/modules/$(shell uname -r)/buildSRCPWD:=$(shell pwd)all:make -C $(KDIR) M=$(SRCPWD) modulesclean:rm -rf chardev.omydev.c#include <linux/kernel.h>#include <linux/fs.h>#include <linux/module.h>#include <asm/uaccess.h>#include <linux/cdev.h>static int mydevread(struct file *filp,char __user *buffer,size_t,loff_t *);static int mydevopen(struct inode *,struct file *);static int mydevwrite(struct file *filp,const char __user *buffer,size_t ,loff_t*);static int mydevrelease(struct inode *,struct file *);static int major;static char buf[100]="Mydev is working!";static const struct file_operations file_ops = {.read = mydevread,.write = mydevwrite,.open = mydevopen,.release = mydevrelease};static int __init mydev_init(void){int result;major = 0;result = register_chrdev(major, "mydev", &file_ops);if (result < 0) {printk("register mydev failed!\n");return result;}if (major == 0)major = result;return 0;}static int mydevopen(struct inode *inode,struct file *file) {try_module_get(THIS_MODULE);printk("mydev open called!\n");return 0;}static int mydevrelease(struct inode *inode,struct file *file) {module_put(THIS_MODULE);printk("mydev clean called!\n");return 0;}static int mydevread(struct file *filp,char __user *buffer,size_t length,loff_t *offset){int rd;rd=copy_to_user(buffer,&buf,length);if(rd)return length;return -1;}static int mydevwrite(struct file *filp,const char __user *buffer,size_t length,loff_t *offset) {int wt;wt=copy_from_user(&buf,buffer,length);if(wt)return length;return -1;}static void __exit mydev_close(void){unregister_chrdev(major, "mydev");}module_init(mydev_init);module_exit(mydev_close);。
实验二:字符设备驱动实验

实验二:字符设备驱动实验一、实验目的通过本实验的学习,了解Linux操作系统中的字符设备驱动程序结构,并能编写简单的字符设备的驱动程序以及对所编写的设备驱动程序进行测试,最终了解Linux操作系统如何管理字符设备。
二、准备知识字符设备驱动程序主要包括初始化字符设备、字符设备的I/O调用和中断服务程序。
在字符设备驱动程序的file_operations结构中,需要定义字符设备的基本入口点。
open()函数;release()函数read()函数write()函数ioctl()函数select()函数。
另外,注册字符设备驱动程序的函数为register_chrdev()。
register_chrdev() 原型如下:int register_chrdev(unsigned int major, //主设备号const char *name, //设备名称struct file_operations *ops); //指向设备操作函数指针其中major是设备驱动程序向系统申请的主设备号。
如果major为0,则系统为该驱动程序动态分配一个空闲的主设备号。
name是设备名称,ops是指向设备操作函数的指针。
注销字符设备驱动程序的函数是unregister_chrdev(),原型如下:int unregister_chrdev(unsigned int major,const char *name);字符设备注册后,必须在文件系统中为其创建一个设备文件。
该设备文件可以在/dev目录中创建,每个设备文件代表一个具体的设备。
使用mknod命令来创建设备文件。
创建设备文件时需要使用设备的主设备号和从设备号作为参数。
阅读教材相关章节知识,了解字符设备的驱动程序结构。
三、实验内容根据教材提供的实例。
编写一个简单的字符设备驱动程序。
要求该字符设备包括open()、write()、read()、ioctl()和release()五个基本操作,并编写一个测试程序来测试所编写的字符设备驱动程序。
linux-GPIO驱动实验

GPIO驱动实验一、实验目的1.理解Linux GPIO驱动程序的结构、原理。
2.掌握Linux GPIO驱动程序的编程。
3.掌握Linux GPIO动态加载驱动程序模块的方法。
二、实验内容1. 编写GPIO字符设备驱动程序。
2. 编写Makefile文件。
3. 编写测试程序。
4. 调试GPIO驱动程序和测试程序。
三、实验设备1.硬件:PC机,基于ARM9系统教学实验系统实验箱1台;网线;串口线,电压表。
2.软件:PC机操作系统;Putty;服务器Linux操作系统;arm-v5t_le-gcc交叉编译环境。
3.环境:ubuntu12.04.4;文件系统版本为filesys_clwxl;烧写的内核版本为uImage_slh_gpio,编译成的驱动模块为davinci_dm365_gpios.ko,驱动源码见GPIO文件夹。
四.预备知识4.1 概述在嵌入式系统中,常常有数量众多,但是结构却比较简单的外部设备/电路,对这些设备/电路有的需要CPU为之提供控制手段,有的则需要被CPU用作输入信号。
而且,许多这样的设备/电路只要求一位,即只要有开/关两种状态就够了,例如灯的亮与灭。
对这些设备/电路的控制,使用传统的串行口或并行口都不合适。
所以在微控制器芯片上一般都会提供一个通用可编程I/O接口,即GPIO (General Purpose Input Output)。
GPIO的驱动主要就是读取GPIO口的状态,或者设置GPIO口的状态。
就是这么简单,但是为了能够写好的这个驱动,在LINUX上作了一些软件上的分层。
为了让其它驱动可以方便的操作到GPIO,在LINUX里实现了对GPIO操作的统一接口,这个接口实则上就是GPIO驱动的框架。
在本实验中,将编写简单的GPIO驱动程序来控制LCD液晶屏屏幕的亮灭,然后动态加载模块,并编写测试程序,以验证驱动程序。
4.2 实现的功能1> 设置对应的GPIO口为输出。
添加驱动程序的步骤
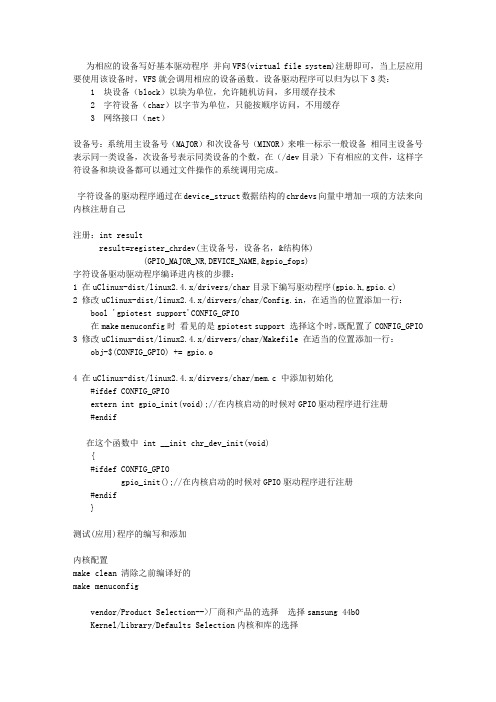
为相应的设备写好基本驱动程序并向VFS(virtual file system)注册即可,当上层应用要使用该设备时,VFS就会调用相应的设备函数。
设备驱动程序可以归为以下3类:1 块设备(block)以块为单位,允许随机访问,多用缓存技术2 字符设备(char)以字节为单位,只能按顺序访问,不用缓存3 网络接口(net)设备号:系统用主设备号(MAJOR)和次设备号(MINOR)来唯一标示一般设备相同主设备号表示同一类设备,次设备号表示同类设备的个数,在(/dev目录)下有相应的文件,这样字符设备和块设备都可以通过文件操作的系统调用完成。
字符设备的驱动程序通过在device_struct数据结构的chrdevs向量中增加一项的方法来向内核注册自己注册:int resultresult=register_chrdev(主设备号,设备名,&结构体)(GPIO_MAJOR_NR,DEVICE_NAME,&gpio_fops)字符设备驱动驱动程序编译进内核的步骤:1 在uClinux-dist/linux2.4.x/drivers/char目录下编写驱动程序(gpio.h,gpio.c)2 修改uClinux-dist/linux2.4.x/dirvers/char/Config.in,在适当的位置添加一行:bool 'gpiotest support'CONFIG_GPIO在make menuconfig时看见的是gpiotest support 选择这个时,既配置了CONFIG_GPIO 3 修改uClinux-dist/linux2.4.x/dirvers/char/Makefile 在适当的位置添加一行:obj-$(CONFIG_GPIO) += gpio.o4 在uClinux-dist/linux2.4.x/dirvers/char/mem.c 中添加初始化#ifdef CONFIG_GPIOextern int gpio_init(void);//在内核启动的时候对GPIO驱动程序进行注册#endif在这个函数中 int __init chr_dev_init(void){#ifdef CONFIG_GPIOgpio_init();//在内核启动的时候对GPIO驱动程序进行注册#endif}测试(应用)程序的编写和添加内核配置make clean 清除之前编译好的make menuconfigvendor/Product Selection-->厂商和产品的选择选择samsung 44b0Kernel/Library/Defaults Selection内核和库的选择--Kernel is linux-2.4.x(uClibc)Libc Version压缩的libc 的库[ ] Default all settings(lose changes)[*] Customize Kernel Settings 内核的设定,添加驱动程序[*] Customize Vendor/User Settings根文件系统,ram fs 内核配置目录:Code maturity level options-->代码成熟度[]还在开发阶段的[]Loadable module support-->[]Enable Loadable module support内核模块的支持System Type -->系统类型 (Samsung)ARM system type[ ]Generate big endian code 大小端的选择[*]Set flash/sdram size and base addr 选择存储器的大小(0c000000)(S)DRAM Base Address(00800000)(S)DRAM Size(00000000)FLASH Base Address(00200000)FLASH Size 2M(RAM)Kernel executes from(S3C44B0X-MBA44) Board InplementationGeneral setup-->通用设定[ ]Support hot-pluggable devices热拔插[*]Networking support 网络的支持[ ]System V IPC进程间通信[ ]Reduced memory footprint[ ]BSD Process Accouting[ ]Sysct1 support[*]NMFPE math emulation模拟数字协处理器(ELF)Kernel core(/proc/kcore) format内核格式[*]Support uClinux FLAT format binaries 对没有MMU 的处理器的支持[*]Support FLAT format compressed binaries[ ]RISC OS personality[ ]Compiled-in Kernel Boot Parameter[*]Timer and CPU usage LEDs[*]Timer LED[*]CPU usage LED[ ]Kernel -mode alignment trap handler[ ]m68knommu-style attached romfs in RAM supportNetworking options-->网络选项Network device support网卡的支持Amateur Radio support 启动无线网络IrDA (infrared)supportATA/IDE/MFM/RLL supportSCSI support 一种存储接口ISDN subsystem数字电话的Parallel port support并行接口Memory Technology Devices(MTD)内存设备Plug and Play configuration即插即用设备Block devices块设备File systems文件系统Character devices字符设备USB supportI2O device supportKernel hackingCryptographic optionsLibrary routinesLoad an Alternate Configuration FileSave Configuration to an Alternate File进行应用程序的配置Core A[[lications 核心配置[*]init[*]enable console shell [*]execute firewall rulesLibrary Configuration 库的配置FLASH Tools Flash 一些工具Filesystem Applications 文件系统的应用Network Applications 网络配置Miscellaneous ApplicationsBusyBoxTinyloginMicroWindowsGamesNiscellaneous ConfiuggurationDebug Buildsgsm modemLED testS3C rtc testS3C adc testS3C ps2 testS3C eirq test再make depmake lib_onlymake user_onlymake romfs创建文件系统make image 创建镜像make。
linux驱动面试题
linux驱动面试题Linux驱动是指在Linux操作系统中,用于控制与硬件之间的交互和通信的软件模块。
在Linux的工作环境中,驱动程序起着至关重要的作用。
如果你准备参加Linux驱动的面试,以下是一些常见的Linux驱动面试题,希望可以对你有所帮助。
一、简述Linux驱动的作用和功能。
Linux驱动是一种软件模块,用来控制硬件设备与操作系统之间的通信和交互。
它负责将输入/输出请求传递给硬件设备,并处理来自硬件设备的中断和事件。
Linux驱动的功能包括设备初始化和配置、数据传输和处理以及错误处理等。
二、请简要介绍Linux驱动程序的加载过程。
当系统启动时,Linux内核首先会加载核心模块和驱动程序模块。
驱动程序模块是以目标硬件设备为基础的,它们包含了与设备通信所需的函数和数据结构。
一般情况下,系统会根据硬件设备信息自动加载对应的驱动程序模块。
加载驱动程序模块需要通过insmod或modprobe命令进行,这些命令可以在启动时自动执行。
三、请简述Linux驱动程序的实现方式。
Linux驱动程序的实现方式包括内核空间驱动和用户空间驱动。
内核空间驱动是指驱动程序运行在内核空间,直接与硬件设备进行交互。
用户空间驱动是指驱动程序运行在用户空间,通过系统调用和内核模块实现与硬件设备的通信。
内核空间驱动的优势是性能更好,但需要对内核进行编译和加载,而用户空间驱动的优势是开发更加容易,但性能会稍差。
四、请介绍Linux驱动程序中常用的数据结构和函数。
在Linux驱动程序中,常用的数据结构有file结构体、inode结构体和cdev结构体等。
file结构体用于表示一个打开的设备文件,可以通过它传递与设备相关的信息。
inode结构体用于表示一个文件的元数据信息,包括文件的权限、大小和创建时间等。
cdev结构体用于表示一个字符设备,包含了设备文件的操作函数和设备号等信息。
常用的函数包括register_chrdev、unregister_chrdev、request_irq和release_irq等。
字符设备驱动原理

字符设备驱动原理
字符设备驱动原理是指操作系统中负责管理字符设备的驱动程
序的工作原理。
字符设备驱动程序是操作系统与硬件设备之间的接口,它负责将用户空间与设备之间的数据传输进行协调和管理。
字符设备包括键盘、鼠标、串口、打印机等等。
字符设备驱动程序需要完成设备初始化、数据传输、设备控制、中断处理等任务,同时也需要考虑到设备的特殊性质以及不同硬件之间的差异。
在字符设备驱动的开发过程中,需要熟悉操作系统的内核结构、设备驱动模型以及字符设备的工作模式等知识。
除此之外,还需要掌握C语言、汇编语言等工具和技术,熟练使用操作系统提供的API和驱动开发工具。
字符设备驱动的优化和改进是一个长期的过程,在不断探索和实践中,需要不断提高自己的技术水平和创新能力。
- 1 -。
Linux字符设备驱动开发方法与应用实例
 ̄l a0 re) led 和w i ( : r t 调用等 ; 还包含对用户发出的控制请求
的响 应 , 比如 启动 或 关 闭 设备 等 。由于用 户发 出 的I 功 / O 能 调 用 和控 制请 求 是在 确 定 的 时间 内发 生 , 以它是 同 所 步 事 件 , 执 行 的先 后 顺 序上 看 , 在 中断 程 序 的后 面 从 它
P  ̄ 的并 口控制卡经常使用 的2 / 并 口基地 址 cJ L 个I O 是0 3 8 x 7 , x 7 和0 2 8 在并 口通信 中使 用的电平信号 是标
准的T L T 电平 : 伏和5 我们要把驱动程序 的下部分 0 伏。
被执行, 所以把它称为驱动程序的下半部 。
FI NANCI AL coM PUTE
驱动 程序的代码按照执 行时 间是 否确定, 可将其分为
同步 执 行 和 异 步 执 行 的 代码 。 Ln x 在 iu 内核 中把 同步 执
行 的代码 称为驱动程序 的下半部 , 把异步执 行的代码
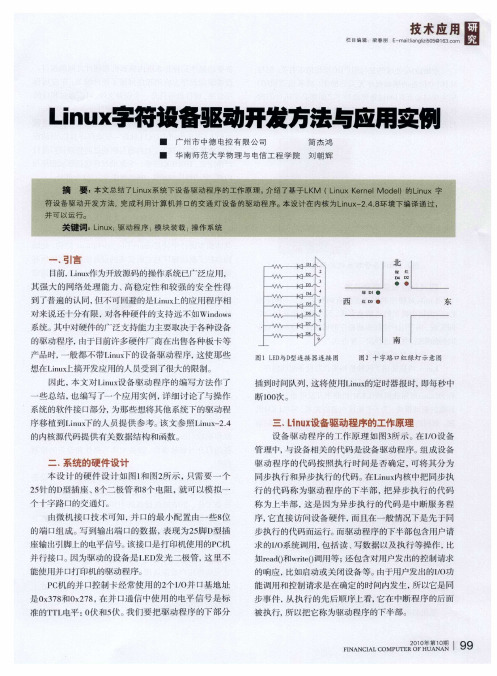
个十字路 口的交通灯。
由微 机 接 口技 术 可知 , 口的 最 小 配 置 由一 些 8 并 位 的 端 口组 成 。 到输 出 端 口的 数 据 , 现 为 2 脚 D 插 写 表 5 型
一
捅到时间队列, 这将使用Ln x i 的定时器报时, u 即每秒中
断 l0 。 0次
些总结 , 也编 写 了一个 应 用 实例 , 细 讨 论 了与 操 作 详
系统的软件 接口部分, 为那些想将其他 系统下的驱动程 序移植 ̄ Ln x J l iu下的人员提供参 考。 该文参 ̄Ln x24 i 一. u 的内核源代码提供有关数据结构和函数。
电脑开机后出现设备驱动程序错误如何解决
电脑开机后出现设备驱动程序错误如何解决当我们满心欢喜地打开电脑,准备开启一天的工作或娱乐之旅,却突然被一个弹窗告知“设备驱动程序错误”,这无疑会让人感到十分烦恼。
别担心,接下来我将为您详细介绍如何解决这个问题。
首先,我们需要了解什么是设备驱动程序。
简单来说,设备驱动程序就像是连接电脑硬件和操作系统的“桥梁”,它能让硬件设备正常工作。
如果这个“桥梁”出现了问题,硬件设备就可能无法正常运行,从而导致各种错误提示。
那么,为什么电脑开机后会出现设备驱动程序错误呢?原因有很多。
可能是驱动程序本身损坏或过时,也可能是在系统更新或安装新软件时,与现有的驱动程序产生了冲突。
此外,电脑中的病毒或恶意软件也可能对驱动程序造成破坏。
当遇到这种情况时,我们可以尝试以下几种解决方法。
第一种方法是重启电脑。
有时候,只是系统出现了短暂的故障,通过重启电脑就能够解决问题。
这就像是给电脑一个“重新开始”的机会,让它重新加载驱动程序。
如果重启电脑没有效果,那么我们可以进入设备管理器查看驱动程序的状态。
按下“Win +X”键,在弹出的菜单中选择“设备管理器”。
在设备管理器中,我们可以看到各种硬件设备的列表。
如果某个设备旁边有黄色的感叹号或问号,那就说明这个设备的驱动程序可能存在问题。
找到有问题的设备后,右键单击它,选择“更新驱动程序”。
系统会自动搜索并安装最新的驱动程序。
如果系统无法找到合适的驱动程序,我们可以前往硬件设备的官方网站,下载对应的最新驱动程序进行手动安装。
另外,我们还可以使用第三方的驱动更新软件来解决问题。
这些软件可以自动检测并更新电脑中的驱动程序,为我们节省不少时间和精力。
但在使用第三方软件时,要注意选择正规可靠的软件,以免下载到恶意软件或不兼容的驱动程序。
除了更新驱动程序,我们还可以尝试回滚驱动程序。
如果最近刚刚更新了某个设备的驱动程序,然后就出现了问题,那么很可能是新的驱动程序不兼容。
在设备管理器中,右键单击有问题的设备,选择“属性”,在“驱动程序”选项卡中点击“回滚驱动程序”按钮,将驱动程序恢复到之前的版本。
[知识]什么是驱动程序
![[知识]什么是驱动程序](https://img.taocdn.com/s3/m/d6741fe3760bf78a6529647d27284b73f2423639.png)
什么是驱动程序驱动程序一、什么是驱动程序根据百度百科:驱动程序,英文名为“Device Driver”,全称为“设备驱动程序”,是一种可以使计算机和设备通信的特殊程序,可以说相当于硬件的接口,操作系统只有通过这个接口,才能控制硬件设备的工作,假如某设备的驱动程序未能正确安装,便不能正常工作。
因此,驱动程序被誉为“ 硬件的灵魂”、“硬件的主宰”、和“硬件和系统之间的桥梁”等。
刚安装好的系统操作系统,很可能驱动程序安装得不完整。
硬件越新,这种可能性越大。
菜菜熊之前看到的“图标很大且颜色难看”就是没有安装好驱动的原因。
在软件测试中:在自底向上测试中,要编写称为测试驱动的模块调用正在测试的模块。
测试驱动模块以和将来真正模块同样的方式挂接,向处于测试的模块发送测试用例数据,接受返回结果,验证结果是否正确。
二、驱动程序的作用随着电子技术的飞速发展,电脑硬件的性能越来越强大。
驱动程序是直接工作在各种硬件设备上的软件,其“驱动”这个名称也十分形象的指明了它的功能。
正是通过驱动程序,各种硬件设备才能正常运行,达到既定的工作效果。
硬件如果缺少了驱动程序的“驱动”,那么本来性能非常强大的硬件就无法根据软件发出的指令进行工作,硬件就是空有一身本领都无从发挥,毫无用武之地。
这时候,电脑就正如古人所说的“万事俱备,只欠东风”,这“东风”的角色就落在了驱动程序身上。
如此看来,驱动程序在电脑使用上还真起着举足轻重的作用。
从理论上讲,所有的硬件设备都需要安装相应的驱动程序才能正常工作。
但像CPU、内存、主板、软驱、键盘、显示器等设备却并不需要安装驱动程序也可以正常工作,而显卡、声卡、网卡等却一定要安装驱动程序,否则便无法正常工作。
这是为什么呢?这主要是由于这些硬件对于一台个人电脑来说是必需的,所以早期的设计人员将这些硬件列为BIOS能直接支持的硬件。
换句话说,上述硬件安装后就可以被BIOS和操作系统直接支持,不再需要安装驱动程序。
字符设备驱动程序的基本步骤

字符设备驱动程序的基本步骤字符设备驱动程序的基本步骤一.设备号对字符设备的访问是通过文件系统内的设备名称来访问的,设备名称位于目录/dev下.为了便于系统管理,设置了和设备名称一一对应的设备号,它分为主设备号和次设备号.通常来说,主设备号标示了设备对应的驱动程序,次设备号则用来分辨拥有同一个主设备号的的各个不同设备.在内核中,设备号使用类型dev_t来保存,它包括了主设备号和次设备号.dev_t是一个32位的整数,其中的12位用来标示主设备号,其余的20位用来标示次设备号.我们可以使用两个宏来获得设备的主设备号及次设备号:MAJOR(dev_t dev_id);MINOR(dev_t dev_id);将主设备号和次设备号转换为dev_t类型,则可以使用下面的宏:MKDEV(int major, int minor);其中,major为主设备号,minor为次设备号.二.分配设备号在建立一个字符设备之前.首先要申请设备号,完成该功能的函数有两个,都包含在头文件中.下面分别来看这两个文件:1.int register_chrdev_region(dev_t first, unsigned int count, char *name);其中, first为要分配的设备编号范围的起始值,经常被置零.count则是所请求的连续设备编号的个数,这意味着只能申请连续的设备编号.2.int alloc_chrdev_region(dev_t *dev, unsigned firstminor, int count, char *name);其中dev用于保存申请成功后动态分配的第一个设备号, firstminor则是请求使用的第一个次设备号.其余与上个函数相同.三.定义并初始化file_operations结构体.file_operations结构体用于连接设备号和驱动程序的操作.在该结构体的内部包含了一组函数指针,这些函数用来实现系统调用.通常情况下,要注册如下的几个函数:1.struct module *owner:用来指向拥有该结构体的模块.2.ssize_t read(struct file *filp, char __user *buf, size_t count, loff_t *f_ops):用来从设备中读取数据.其中:filp为文件属性结构体指针.buf为用户态函数使用的字符内存缓冲.count为要读取的数据数.f_ops为文件指针的偏移量.2.ssize_t write(struct file *filp, const char __user *buf, size_t count, loff_t *f_ops):用来向设备输入数据.各函数的含义与上个函数相同.3.int open(struct inode *inode, struct file *):该函数用来打开一个设备文件.4.int release(struct inode *inode, struct file *):该函数用来关闭一个设备文件.该结构体的初始化形式如下例:struct file_operations scull_fops = {.owner = THIS_MODULE,.read = read,.write = write,.open = open,.release = release,}四.字符设备的注册.内核内部使用struct cdev结构来表示字符设备.在内核调用设备的操作之前,必须分配或注册一个或者多个该结构体.该结构体包含在头文件中.一般的步骤如下:首先定义该结构体:struct cdev my_cdev;然后即可以初始化该结构,使用如下的函数初始化:int cdev_init(struct cdev *dev, struct file_operations *fops).然后定义该结构体中的一个所有者字段:my_cdev.owner = THIS_MODULE;最后即可以向模块添加该结构体:int cdev_add(struct cdev *dev, dev_t dev_num, usigned int count).其中dev是cdev结构体,dev_num是该设备对应的第一个设备编号, count则是与该设备关联的设备编号数量.五.移除字符设备void cdev_del(struct cdev *dev);六.注销设备号.unregister_chrdev_region(dev_t first, unsigned int count);以上两个函数一般用于模块出口函数中.。
简述字符设备驱动开发流程
简述字符设备驱动开发流程
字符设备驱动是Linux 内核开发中常见的一种驱动类型,用于处理字符设备的操作。
下面按照流程来简述字符设备驱动的开发过程。
1. 设计驱动程序接口
首先需要确定驱动程序需要提供哪些接口,例如读写、打开关闭等操作。
这些接口需要定义在驱动程序的头文件中。
2. 实现设备驱动程序
根据接口定义,编写设备驱动程序的实现代码。
主要包括初始化、读写、打开关闭等操作。
3. 编写设备节点的创建和删除代码
在Linux 中,每个设备都会被映射到一个设备节点上。
因此,需要编写代码来创建和删除设备节点。
4. 注册设备驱动程序
将设备驱动程序注册到Linux 内核中,让内核能够找到并加载驱动程序。
5. 编译和安装设备驱动程序
将设备驱动程序编译成内核模块或以静态方式链接到内核中。
安装驱动程序。
6. 测试和调试
在实际运行中,需要对设备驱动程序进行测试和调试,确认其功能和稳定性。
以上是字符设备驱动的开发流程,需要安排合理的时间进行开发和测试。
良好的开发流程能够提高驱动程序的质量和稳定性。
Linux设备驱动开发详解-第6章字符设备驱动(一)-globalmem

Linux设备驱动开发详解-第6章字符设备驱动(⼀)-globalmem1 驱动程序设计之前奏 (2)1.1 应⽤程序、库、内核、驱动程序的关系 (2)1.2 设备类型 (2)1.3 设备⽂件 (2)1.4 主设备号和从设备号 (2)1.5 驱动程序与应⽤程序的区别 (3)1.6 ⽤户态与内核态 (3)1.7 Linux驱动程序功能 (3)2 字符设备驱动程序框架 (3)2.1 file_operations结构体 (4)2.2 驱动程序初始化和退出 (5)2.3 将驱动程序模块注册到内核 (5)2.4 应⽤字符设备驱动程序 (5)3 globalmem虚拟设备实例描述 (6)3.1 头⽂件、宏及设备结构体 (6)3.2 加载与卸载设备驱动 (6)3.3 读写函数 (8)3.4 seek()函数 (9)3.5 ioctl()函数 (10)3.6 globalmem完整实例 (12)4 测试应⽤程序 (17)4.1 应⽤程序接⼝函数 (17)4.2 应⽤程序 (18)5 实验步骤 (19)5.1 编译加载globalmem 模块 (19)5.2 编译测试应⽤程序 (20)6 扩展 (21)1 驱动程序设计之前奏㈠应⽤程序、库、内核、驱动程序的关系㈡设备类型㈢设备⽂件㈣主设备号与从设备号㈤驱动程序与应⽤程序的区别㈥⽤户态与内核态㈦Linux驱动程序功能1.1 应⽤程序、库、内核、驱动程序的关系■应⽤程序调⽤应⽤程序函数库完成功能■应⽤程序以⽂件形式访问各种资源■应⽤程序函数库部分函数直接完成功能部分函数通过系统调⽤由内核完成■内核处理系统调⽤,调⽤设备驱动程序■设备驱动直接与硬件通信1.2 设备类型■字符设备对字符设备发出读/写请求时,实际的硬件I/O操作⼀般紧接着发⽣■块设备块设备与之相反,它利⽤系统内存作为缓冲区■⽹络设备⽹络设备是⼀类特殊的设备,它不像字符设备或块设备那样通过对应的设备⽂件节点访问,也不能直接通过read或write进⾏数据访问请求1.3 设备⽂件■设备类型、主从设备号是内核与设备驱动程序通信时使⽤的■应⽤程序使⽤设备⽂件节点访问对应设备■每个主从设备号确定的设备都对应⼀个⽂件节点■每个设备⽂件都有其⽂件属性(c或者b)■每个设备⽂件都有2个设备号(后⾯详述)主设备号:⽤于标识驱动程序从设备号:⽤于标识同⼀驱动程序的不同硬件■设备⽂件的主设备号必须与设备驱动程序在登记时申请的主设备号⼀致■系统调⽤是内核与应⽤程序之间的接⼝■设备驱动程序是内核与硬件之间的接⼝1.4 主设备号和从设备号■在设备管理中,除了设备类型外,内核还需要⼀对被称为主从设备号的参数,才能唯⼀标识⼀个设备■主设备号相同的设备使⽤相同的驱动程序■从设备号⽤于区分具体设备的实例例:PC的IDE设备,主设备号⽤于标识该硬盘,从设备号⽤于标识每个分区■在/dev⽬录下使⽤ll命令(ls -l)可以查看各个设备的设备类型、主从设备号等■cat /proc/devices可以查看系统中所有设备对应的主设备号1.5 驱动程序与应⽤程序的区别■应⽤程序以main开始■驱动程序没有main,它以⼀个模块初始化函数作为⼊⼝■应⽤程序从头到尾执⾏⼀个任务■驱动程序完成初始化之后不再运⾏,等待系统调⽤■应⽤程序可以使⽤GLIBC等标准C函数库■驱动程序不能使⽤标准C库1.6 ⽤户态与内核态■驱动程序是内核的⼀部分,⼯作在内核态■应⽤程序⼯作在⽤户态■数据空间访问问题★⽆法通过指针直接将⼆者的数据地址进⾏传递★系统提供⼀系列函数帮助完成数据空间转换get_userput_usercopy_from_usercopy_to_user1.7 Linux驱动程序功能■对设备初始化和释放■把数据从内核传送到硬件和从硬件读取数据■读取应⽤程序传送给设备⽂件的数据和回送应⽤程序请求的数据■检测和处理设备出现的错误2 字符设备驱动程序框架①Linux各种设备驱动程序都是以模块的形式存在的,驱动程序同样遵循模块编程的各项原则②字符设备是最基本、最常⽤的设备,其本质就是将千差万别的各种硬件设备采⽤⼀个统⼀的接⼝封装起来,屏蔽了不同设备之间使⽤上的差异性,简化了应⽤层对硬件的操作③字符设备将各底层硬件设备封装成统⼀的结构体,并采⽤相同的函数操作,如下等:open/close/read/write/ioctl④添加⼀个字符设备驱动程序,实际上是给上述操作添加对应的代码⑤Linux对所有的硬件操作统⼀做以下抽象抽象file_operations结构体规定了驱动程序向应⽤程序提供的操作接⼝struct file_operations ext2_file_operations ={.llseek = generic_file_llseek,.read = generic_file_read,.write = generic_file_write,.aio_read = generic_file_aio_read,.aio_write = generic_file_aio_write,.ioctl = ext2_ioctl,.mmap = generic_file_mmap,.open = generic_file_open,.release = ext2_release_file,.fsync = ext2_sync_file,.readv = generic_file_readv,.writev = generic_file_writev,.sendfile = generic_file_sendfile,};⑥⽤户态与内核态数据的交互⽤户应⽤程序与驱动程序分属于不同的进程空间,因此⼆者之间的数据应当采⽤以下函数进⾏交换long copy_to_user(kernel_buffer, user_buffer,n)//从内核空间拷贝n字节数据到⽤户空间copy_from_user(kernel_buffer, user_buffer,n)//从⽤户空间拷贝n字节数据到内核空间put_user(kernel_value, user_buffer)//从内核空间拷贝⼀数据变量到⽤户空间get_user(kernel_value, user_buffer)//从⽤户空间拷贝⼀数据变量到内核空间(内核空间数据可是任意类型)2.1 file_operations结构体⑴write函数■从应⽤程序接收数据送到硬件ssize_t (*write)(struct file*, const char __user *, size_t, loff_t*);⑵read函数■从硬件读取数据并交给应⽤程序ssize_t (*read)(struct file *, char __user *, size_t, loff_t*); /// 从设备中同步读取数据⑶ioctl函数■为应⽤程序提供对硬件⾏为的相关配置int (*ioctl)(struct inode *, struct file *, unsigned int, unsigned long);⑷open函数■当应⽤程序打开设备时对设备进⾏初始化■使⽤MOD_INC_USE_COUNT增加驱动程序的使⽤次数,当模块使⽤次数不为0时,禁⽌卸载模块Int (*open)(struct inode *, struct file*);⑸release函数■当应⽤程序关闭设备时处理设备的关闭操作■使⽤MOD_DEC_USE_COUNT减少驱动程序的使⽤次数,配合open使⽤,来对模块使⽤次数进⾏计数int (*release)(struct inode *, struct file*);⑹⑻⑻⑼⑽2.2 驱动程序初始化和退出①驱动程序初始化函数■Linux在加载内核模块时会调⽤初始化函数■在初始化函数中⾸先进⾏资源申请等⼯作■使⽤register_chrdev向内核注册驱动程序②驱动程序退出函数■Linux在卸载内核模块时会调⽤退出函数■释放驱动程序使⽤的资源■使⽤unregister_chrdev从内核中卸载驱动程序2.3 将驱动程序模块注册到内核内核需要知道模块的初始化函数和退出函数,才能将模块放⼊⾃⼰的管理队列中①module_init()向内核声明当前模块的初始化函数②module_exit()向内核声明当前模块的退出函数2.4 应⽤字符设备驱动程序㈠加载驱动程序■insmod 内核模块⽂件名■cat /proc/devices 查看当前系统中所有设备驱动程序及其主设备号㈡⼿动建⽴设备⽂件■设备⽂件⼀般建⽴/dev⽬录下■mknod ⽂件路径c [主设备号] [从设备号]㈢应⽤程序接⼝函数■编写应⽤层测试程序■可以使⽤标准C的⽂件操作函数来完成①int open(const char *path, int oflag,…);★打开名为path的⽂件或设备★成功打开后返回⽂件句柄★常⽤oflag:O_RDONLY, O_WRONLY, O_RDWR②int close(int fd);★关闭之前被打开的⽂件或设备★成功关闭返回0,否则返回错误代号③ssize_t read(int fd, void *buffer, size_t count)★从已经打开的⽂件或设备中读取数据★buffer表⽰应⽤程序缓冲区★count表⽰应⽤程序希望读取的数据长度★成功读取后返回读取的字节数,否则返回-1④ssize_t write(int fd, void *buffer, size_t count);★向已经打开的⽂件或设备中写⼊数据★buffer表⽰应⽤程序缓冲区★count表⽰应⽤程序希望写⼊的数据长度★成功写⼊后返回写⼊的字节数,否则返回-1④int ioctl(int fd, unsigned int cmd, unsigned long arg);★向驱动程序发送控制命令★cmd:⽤来定义⽤户向驱动分配的命令例如G PF驱动中:设置指定管脚的⾼低电平、输⼊输出特性等为了规范化及错误检查常⽤_IO宏合成该命令:_IO(MAGIC, num) ★arg:配置命令参数配合cmd命令完成指定功能3 globalmem虚拟设备实例描述3.1 头⽂件、宏及设备结构体在globalmem字符设备驱动中,应包含它要使⽤的头⽂件,并定义globalmem设备结构体及相关宏。
linux字符设备驱动程序设计完全剖析

操作硬件 ,而是使用统一的接 口函数调用硬件 驱动 程序 。这
组接 口被称为 系统调用 , 在库函数中定义。
一
般将 L i n u x系统 的设备驱动程序分为 3类:字符设备
( c h a r a c t e r d e v i c e ) 、 块设备 ( b l o c k d e v i c e ) ¥ H 网络接 口( n e t wo r k
设想一下 , 如何在提示符# 下来控制 a l T n硬件电路板 上的 l e d灯呢?那么就 需要 用到 l i n u x设备驱动程序 了。本文就是 阐述 如何在 l i n u x终端提示 符 下, 如何构建 l i n u x字符设备驱 动程 序, 使得在 l i n u x终端提示符下能够实现开关 a r m硬件平 台上的 l e d灯 的功能 。 通过这样一个实例来阐述 l i n u x字符设
1设想 的应 用场 景
在a r n l 硬件平 台上 , 移植了 u b o o t , 移植 了 l i n u x操作系统 和根文件 系统 。这样一个完整的硬件平台就搭建好 了。启动 整个 系统后 , 以r o o t 身份登录, 就会 出现 l i n u x 终端 的提示符样 , 可以执行 l s 命令等 。 大 多数硬件平 台一般都有类似于这样的 电路部分, 如图 1 所示 :
11 6
灭灯
信 息通信
刘光然: l i n u x字符设备驱动程序设计完全剖析 这样 设备程序 就加载如 l i n u x内核 了, 驱动程序不 主动运
设 备 程 序 的 全部 知 识 点 。 关键词 : a r m; l i n u x ; 字符 设 备 驱 动 程 序
中图分 类号 : T P 3 8
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
字符设备驱动程序字符设备驱动程序与块设备不同。
所涉及的键盘驱动、控制台显示驱动和串口驱动以及与这些驱动有关的接口、算法程序都紧密相关。
他们共同协作实现控制台终端和串口终端功能。
下图反映了控制台键盘中断处理过程。
以上为总的处理流程,下面对每一个驱动分开分析。
首先是键盘驱动。
键盘驱动用汇编写的,比较难理解,牵涉内容较多,有键盘控制器804X的编程,还有扫描码(共3套,这里用第二套)和控制命令及控制序列(p209~210有讲解)。
由于键盘从XT发展到AT到现在PS/2,USB,无线键盘,发展较快,驱动各有不同,此版本驱动为兼容XT,将扫描码映射为XT再处理,因此仅供参考。
CNIX操作系统的键盘驱动实现为C语言,可读性更好。
键盘驱动键盘驱动就是上图键盘硬件中断的过程。
keyboard.S中的_keyboard_interrupt函数为中断主流程,文件中其他函数均被其调用。
以上打星处为键盘驱动的核心,即主要处理过程,针对不同扫描码分别处理,并最终将转换后所得ASCII 码或控制序列放入控制台tty 结构的读缓冲队列read_q 中。
键处理程序跳转表为key_table ,根据扫描码调用不同处理程序,对于“普通键”,即只有一个字符返回且没有含义变化的键,调用do_self 函数。
其他均为“特殊键”:1. crtrl 键的按下和释放 2. alt 键的按下和释放 3. shift 键的按下和释放 4. caps lock 键的按下和释放(释放直接返回,不作任何处理) 5. scroll lock 键的按下 6. num lock 的按下 7. 数字键盘的处理(包括alt-ctrl+delete 的处理,因为老式键盘delete 键在数字小键盘上。
还包括对光标移动键的分别处理) 8. 功能键(F1~F12)的处理 9. 减号的处理(老键盘’/’与’-’以0xe0加以区分,可能其中一键要按shift )do_self 是最常用的流程,即跳转表中使用频率最高的流程:控制台程序控制台程序分两部分:1. 控制台初始化 2. 控制台写函数控制台初始化函数根据EGA单色、MDA单色、EGA彩色、CGA各种显卡设置显卡类型、显存占用内存的起始地址、结束地址、显示索引寄存器端口和显示数据寄存器端口。
并将显卡类型打印在屏幕上。
初始化滚屏变量和光标位置,设置键盘中断陷阱门,复位键盘。
控制台写函数从终端对应的tty写缓冲队列中取字符,并显示在屏幕上。
思路是利用状态机原理对缓冲队列中的字符逐一处理(若是字符写在显存对应位置,若是光标,设置光标位置),最后向显示控制器发送光标显示位置。
上图中黑虚线表示不退出case循环读取下一字符,而是直接转到下一状态。
状态1的5、6与状态4的18、19相同。
(?)表示可能包含?串口程序一、串行通信原理通信方式:方向、连接、异步/同步;速度控制:波特率控制、收/发时钟、基准时钟; 差错控制:单/双端、信号重复、检错和纠错编码; 长距离传输:信号调制(调频、调幅、调相); 通道共享:时分多路、频分多路;通信协议:异步串行/同步串行通信协议;接口标准:类型(信号定义、逻辑特性、电气特性、机械特性)二、起止式异步串行通信协议通信前约定—波特率、字符(数据/校验/结束)格式;字符识别—空闲状态、字符开始、数据格式、字符结束、起点漂移解决; 抗干扰(信号重复)实现--起始位采样、数据采样; 字符正确性—校验码编码技术、检错与纠错三、串行通信接口标准标准类型:RS-232C 、RS-422A 、RS-423、RS-485 RS-232C 接口标准:信号定义:RxD、TxD、SG、DTR/DSR、RTS/CTS、DCD、RI逻辑特性:连接、信号使用/不使用MODEM时握手规则电气特性:信号电平、电平转换机械特性:连接器、有效传输距离四、INS8250内部结构内部总体结构中断控制逻辑LSRINTPRT端口定义和寄存器定义LCR—使用时,最后一次使D7=0并设置其它位;DLH/DLL—值为基准时钟频率÷(16×波特率);IIR—中断请求→IIR过程,对IIR读操作时其值的变化原理;与程序关系紧密的硬件是除数寄存器、接受缓冲、发送缓冲、中断允许寄存器、以及通信线路和Modem的控制和状态寄存器。
所谓的DLH/DLL值在除数寄存器中设定,即波特率因子。
同步控制时会以当前设定波特率的16倍频控制每一位信号的脉冲保持时间(即如果要求高信号必须是保持10ms,则同步控制会以10/16ms 的时间精度保证16次的10/16ms都为高脉冲),接收到信号以同样的原理检测信号。
(通常检测16倍频中的第7,8,9三个倍频处的脉冲,以少数服从多数原则判断脉冲的高低)。
中断的屏蔽与否取决于中断允许寄存器。
中断产生后都在中断标识寄存器中置位。
因此只要有中断标识在中断标识寄存器中置位且不屏蔽就会发出中断。
在实际处理中,在串口中断处理中循环判断是否在处理完上一中断后已产生下一中断,若有则直接处理,提高了效率。
串口程序分为初始化部分serial.c和中断处理部分rs_io.s。
串口初始化相当简单:串口中断处理程序也很简单:针对4个中断源的处理函数中两个函数:Modem状态改变的处理和接收状态有错处理都未作实际处理,只是复位相应寄存器。
另两个函数为已接收到数据处理和发送保持寄存器空的处理。
接收到数据中断的处理(read_char函数)(与读队列read_q 交互)发送保持寄存器空中断的处理(write_char函数)(与写队列write_q交互)字符设备(终端)的上层接口tty_io.c和tty_ioctl是终端(控制台和串口终端)的上层接口实现其实除了copy_to_cooked()函数提供完全供内核使用外。
字符设备接口函数(即与用户程序的接口)就三个:tty_read(),tty_write()和tty_ioctl()与用户程序的接口函数的特征是以设备号作为参数,而不会以某个内核数据结构作为参数。
tty_read函数实现用户接口从tty队列的secondary队列中读取字符。
读取的规则由p378的MIN和TIME机制决定。
tty_write函数将用户缓冲区的字符写入tty的write_q队列,未写完或write_q满了则睡眠,直到写完为止。
tty_iotcl是用户程序用来设置或取得tty设备(控制台终端或串口终端)参数的。
如设置或取得termios结构的属性、设置波特率。
获取或设置终端设备进程的组id等。
还有很多功能Linux0.11未实现,估计是为了兼容POSIX标准,已预留了接口。
tty_read(),tty_write()在系统中的位置如下图:值得一提的是tty_queue缓冲队列结构中缓冲区的算法,采用的是循环缓冲区的算法:tail指针处取字符,head指针处插字符。
tail取完一字符和head插完一字符,都将指针增1。
到了边界再转到缓冲区开头,详见p410 23~34行缓冲区操作宏函数。
缓冲区的数据结构如下图:tty_io.c和tty_ioctl.c两文件中与用户接口无关,只在内核中使用的函数是copy_to_cooked()函数。
它的功能是1. 将read_q中的字符复制成规范模式字符放在secondary队列中。
2. 对键盘中断符进行处理:向当前进程发送键盘中断信号,键盘退出信号。
3. 如果设置了回显标志,将相应字符放入write_q队列并调用tty->write直接输出到屏幕(con_write)或从串口输出(rs_write)4. 最后唤醒等待secondary的进程。
Linux0.11字符设备部分总结该部分尽管有键盘、显卡、串口的硬件驱动程序,但它们通过中断串联在了一起,即相互间紧密相关。
相关的方式是以功能为导向:1. 控制台终端 2. 串口终端1.控制台终端,见下面两图。
是以键盘中断触发的中断处理过程:键盘中断处理(扫描码转ASCII码或CSI)->行规则程序(copy_to_cooked)->屏幕显示(显卡驱动con_write,显示字符及光标位置和完成滚屏功能)2.串口驱动,与键盘只有一个中断源(按键)不同,串口有4个中断源,Linux0.11只对接收到数据中断和发送数据中断处理(其余2个只是复位寄存器,暂未处理)。
对于接收到数据中断:上图为串口中断接收到数据后的处理过程。
rs_write的作用是开启写保持空寄存器空中断,此中断会调用write_char中断处理程序。
因此此时是中断嵌套中断。
概括起来也是3步:串行口接收到字符中断->行规则程序(copy_to_cooked)->串口输出(开启写保持寄存器空中断,在中断中调用write_char将write_q中的字符全部输出)对于发送数据中断的处理上图为串口写保持寄存器空时的处理过程。
之前须调用rs_write开启发送保持寄存器空中断。
由上述分析可知,Linux0.11内核的字符设备驱动程序之间关系紧密相关,共同完成控制台终端或串口终端的功能。
管理它们的数据结构设计得也很巧妙:用户接口只能通过传入的设备号来索引tty_table数组从而查询或设置tty设备(控制台或串口终端)的参数。
核心数据结构即为tty_struct,其中又包含了termios结构用来管理控制台和三个tty_queue结构的队列(read_q、write_q、secondary)。
设计很巧妙。
tty_table中有3个tty_struct结构,用来支持控制台、串口1、串口2。
该数组在tty_io.c程序中被初始化,属内核全局数组。
因此只要键盘、串口、显卡被初始化后,字符设备的功能就可(通过中断)自动运行起来。