电气测试技术林德杰课后答案学习资料
过程控制仪表及控制系统课后习题答案(林德杰) 2之欧阳道创编

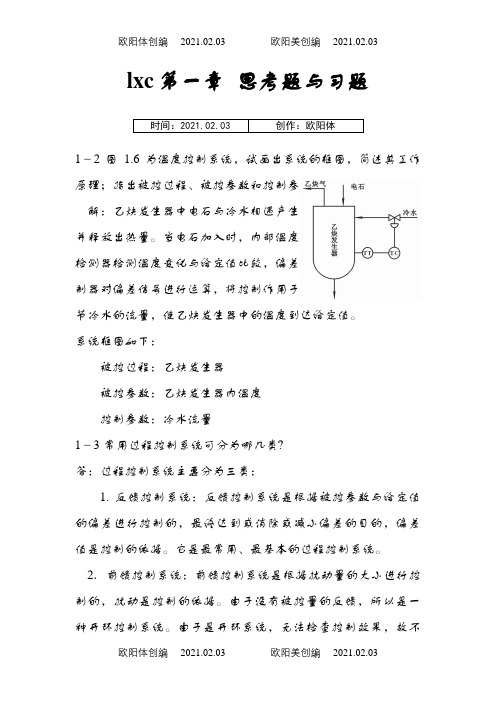
lxc第一章思考题与习题时间:2021.03.06 创作:欧阳道1-2 图1.6为温度控制系统,试画出系统的框图,简述其工作原理;指出被控过程、被控参数和控制参数。
解:乙炔发生器中电石与冷水相遇产生乙炔气体并释放出热量。
当电石加入时,内部温度上升,温度检测器检测温度变化与给定值比较,偏差信号送到控制器对偏差信号进行运算,将控制作用于调节阀,调节冷水的流量,使乙炔发生器中的温度到达给定值。
系统框图如下:被控过程:乙炔发生器被控参数:乙炔发生器内温度控制参数:冷水流量1-3 常用过程控制系统可分为哪几类?答:过程控制系统主要分为三类:1. 反馈控制系统:反馈控制系统是根据被控参数与给定值的偏差进行控制的,最终达到或消除或减小偏差的目的,偏差值是控制的依据。
它是最常用、最基本的过程控制系统。
2.前馈控制系统:前馈控制系统是根据扰动量的大小进行控制的,扰动是控制的依据。
由于没有被控量的反馈,所以是一种开环控制系统。
由于是开环系统,无法检查控制效果,故不能单独应用。
3. 前馈-反馈控制系统:前馈控制的主要优点是能够迅速及时的克服主要扰动对被控量的影响,而前馈—反馈控制利用反馈控制克服其他扰动,能够是被控量迅速而准确地稳定在给定值上,提高控制系统的控制质量。
3-4 过程控制系统过渡过程的质量指标包括哪些内容?它们的定义是什么?哪些是静态指标?哪些是动态质量指标?答:1. 余差(静态偏差)e :余差是指系统过渡过程结束以后,被控参数新的稳定值y(∞)与给定值c 之差。
它是一个静态指标,对定值控制系统。
希望余差越小越好。
2.衰减比n:衰减比是衡量过渡过程稳定性的一个动态质量指标,它等于振荡过程的第一个波的振幅与第二个波的振幅之比,即:n <1系统是不稳定的,是发散振荡;n=1,系统也是不稳定的,是等幅振荡;n >1,系统是稳定的,若n=4,系统为4:1的衰减振荡,是比较理想的。
B Bn '=衡量系统稳定性也可以用衰减率φ4.最大偏差A :对定值系统,最大偏差是指被控参数第一个波峰值与给定值C 之差,它衡量被控参数偏离给定值的程度。
电气测量技术总结和试卷及答案

电气测量总结一、课程的目的掌握基本电量(电压、电流、功率、电能、频率、相位差、功率因数)和电路参数(直流电阻、交流阻抗,包括电感的品质因数、电容的介质损耗)的测量方法。
了解电工仪表、仪器的基本工作原理,能够正确选择和使用。
掌握误差估算方法,能够在工程测量中估算直接测量和间接测量的系统误差。
为从事电气方面的工作和科研奠定工程测量方面的基础。
二、学习方法掌握原理,理解特点,能够正确使用。
主要资料:教材,课件,习题。
辅助资料:电路,电磁场。
三、主要内容u,i。
直流,交流,大,中,小。
功率。
直流,交流;单相,三相;有功,无功。
f Tϕϕ。
数字测量方法。
,,,cos直流电阻,交流阻抗。
大,中,小。
附件:采样电阻,分流器,分压器。
互感器。
误差分析及传递。
重点:各量的模拟测量方法、数字测量方法、间接测量方法、其它测量方法。
各方法的适用情况、原理、特点、误差分析。
四、具体内容(依据陈立周电气测量(第5版))(一)电工仪表与测量的基本知识1、模拟指示仪表的组成和基本原理测量机构是核心。
一种测量机构和不同的测量线路可以组成不同功能的电工仪表,例如,磁电系测量机构接分流器可构成直流电流表,接分压器可构成直流电压表,接电源可构成欧姆表,接整流电路可构成交流的电压或电流表,接传感器可用于测量非电量。
不同类型的测量机构其具体结构不同,但基本原理是相同的,即必然有三个基本力矩:作用力矩,反作用力矩,阻尼力矩。
这三个力矩是各种测量机构中必不可少的,它们决定了测量机构特性。
当作用力矩和反作用力矩相等时,决定了指针的平衡位置。
阻尼力矩改善可动部分的运动特性,使指针尽快静止在平衡位置。
不同的测量机构产生着三个力矩的方式是不同的。
2、数字仪表的组成和基本原理核心是直流数字电压表,将直流电压进行A/D转换和处理。
不同的测量线路将各种待测量转换为允许输入的直流电压。
数字法测量频率和周期不需要A/D转换。
相位差可转换为时间测量,因而数字法测相位差和功率因数也不用A/D转换。
大学教材课后习题答案免费下载链接下部
大学教材课后习题答案免费下载链接(上中下)190-290本资料由上网购返利网分享汽车理论习题答案(考研_作业).pdf→→/s/1zobam汽车理论第五版_课后习题答案(正确).pdf→→/s/1o67DaHk波动习题答案.pdf→→/s/1pJDGFyj泵与风机课后习题答案.pdf→→/s/1gdBph3H 流体力学习题解答李晓燕吴邦喜.pdf→→/s/1qWM2gAo液压与气压传动习题答案.pdf→→/s/1bnksUmV物理化学第五版习题解答(上下册).pdf→→/s/1sjvvFPj物理学教程第二版马文蔚下册课后答案完整版_cropped.pdf→→/s/1sj98Mct物理学第五版上册习题答案.pdf→→/s/1jG1F9NS王勖成《有限单元法》1-5章课后习题答案.pdf→→/s/1nt8vc3B理论力学教程_第三版_周衍柏_课后习题答案_总汇(1).pdf→→理论力学教程_第三版_周衍柏_课后习题答案_总汇.pdf→→/s/1eQABmxW电力系统分析课后习题答案.pdf→→/s/1bngpktD电动力学习题答案chapter5.pdf→→/s/1pJ7AZ5x电子商务法律与法规综合复习题与答案.pdf→→/s/1c0nEFUo电子测量技术基础课后习题答案上1,2,5,6,7,8.pdf→→/s/1hq3f7Is电子线路习题答案梁明理版.pdf→→/s/1bn5rEIr电工学简明教程(第二版)学习辅导与习题解答.pdf→→/s/1mgHQ6xi电机与拖动基础第三版李发海答案(全).pdf→→/s/1dD25KyP电气测试技术第三版_课后习题答案%28林德杰%29.pdf→→/s/1jGwVRE2电磁场与电磁波习题答案 (6).pdf→→/s/1bnrK3pX电磁场与电磁波习题答案 (7).pdf→→电磁场与电磁波习题答案 (8).pdf→→/s/1mgLUqCC电磁场与电磁波习题答案 .pdf→→/s/1hqsqmX2电磁场与电磁波习题答案2.pdf→→/s/1pJDGF0n电路(第五版)_课后习题答案(全)].邱关源_罗先觉_高等教育出版社.pdf→→/s/1sjtZPBR电路与电子学模拟复习题答案.pdf→→/s/1pJvzN6r电路第五版课后习题答案上册.pdf→→/s/1jG3bA30电路第五版课后习题答案下册.pdf→→/s/1jGn22Ke病理学试题库及答案.pdf→→/s/1hqp80wW 看完包过江苏材料员习题和答案——本人亲自考过.pdf→→/s/1qWyL8IS离散数学课后习题答案_屈婉玲(高等教育出版社).pdf→→/s/1gdghe9t算法导论课后习题与思考题答案合集.pdf→→/s/1pJqaiQf粤教版高中物理必修一课后习题答案(1~4章).pdf→→/s/1gdoU5qF线性代数习题册答案(理).pdf→→/s/1dD5n9ZV线性代数习题解答.pdf→→/s/1i3JY7PV线性规划习题答案.pdf→→/s/1hqiMQ00组合数学课后习题答案.pdf→→/s/1hqwuajE 组合逻辑电路课后习题答案.pdf→→/s/1bnnaNwF经典国外教材atkins物理化学第七版课后习题答案.pdf→→/s/1i39jobj经济学原理习题解答第五版%28微观、宏观).pdf→→/s/1sjm8rKT经济应用数学(三)概率论与数理统计修订版(袁荫棠编)习题答案.pdf →→/s/1ntsgiBR结构力学上龙驭求包世华课后习题答案.pdf→→/s/1eQiQVAU结构力学答案(全).pdf→→/s/1qW2Pud2结构力学课后习题答案.pdf→→/s/1kTKA1sN 结构力学龙驭球习题解答(ch2~ch3).pdf→→/s/1eQ676WM结构化学基础第四版习题答案.pdf→→/s/1jGkKEDw罗默《高级宏观经济学》课后习题答案中文版(金圣才主编).pdf→→/s/1c0h9fxe考研数学一历年真题答案(2002-2011).pdf→→/s/1qWoCltU胡寿松《自动控制原理》(第四版)课件_习题答案.pdf→→/s/1o6qcjqy自动控制原理习题解答(第二版)(余成波_张莲_胡.pdf→→/s/1pJsHZ0R自动控制原理习题解答.pdf→→/s/1bn3VJPH 船舶结构力学—课后习题答案.pdf→→/s/1lBC6西安理工大学_供电技术习题答案_机械工业出版社_第四版.pdf→→/s/1kTyVJSz西方经济学简明教程(第七版)习题参考答案.pdf→→/s/1bnmuORd计算机组成原理习题答案.pdf→→/s/1pJAYQQv计算机组成原理课后习题答案.pdf→→/s/1o68tfcA计算机编译原理课后习题答案第三版张幸儿.pdf→→/s/1eQikYlW计算机网络(第4版)习题答案(中文版).pdf→→/s/1dDcNuTj计算机网络(第五版)习题答案_谢希仁.pdf→→/s/1dDmWLJb计算机网络第四版习题答案(第五版上的很多题在这都能找到答案).pdf→→/s/1qWnqs0G计量经济学习题与解答于俊年主编对外经济贸易大学出版社.pdf→→/s/1i3hyUTv证券交易习题大全与答案.pdf→→/s/1o6NSibo证券投资基金章节习题及答案.pdf→→/s/1mgFiKWS课后习题答案(叶见曙主编结构设计原理1-9章).pdf→→/s/1pJ6Vfp5贾俊平_统计学_第四版_习题答案.pdf→→/s/1jG9hn0M软件工程导论(第五版)_(张海藩_着)_清华大学出版社_课后习题答案.pdf→→/s/1kT8zkz1软件工程导论-第五版_课后习题答案%28清华大学出版社%29张海藩著.pdf→→/s/1qWtvU9m软件工程导论_张海藩_第五版课后习题答案.pdf→→/s/1mgK802G运筹学基础及应用第五版胡运权主编课后练习答案.pdf→→/s/1o6K4t8e近代物理复习题答案.pdf→→/s/1bnzmbTl 通信原理_李晓峰_课后习题答案.pdf→→/s/1pJ2lyXX通信原理习题及答案(第六版)_樊昌信_曹丽娜_编著__国防工业出版社.pdf→→/s/1jGDQUJ8通信电子线路习题解答(严国萍版).pdf→→/s/1ntjs7hf逻辑代数基础课后习题答案.pdf→→/s/1o6ufVGe重点推荐---《数值分析》课后习题答案.pdf→→/s/1eQ456QQ量子力学习题解答-第3章.pdf→→/s/1sjoAeID量子力学练习题答案.pdf→→/s/1eQqsylG 金属材料学习题答案(曹志强老师的).pdf→→/s/1gdwvZFl钢结构基础(第二版)课后习题答案.pdf→→/s/1sjlSrut铁道社单片机习题参考答案.pdf→→/s/1o6qIbSA随机过程习题解答.pdf→→/s/1o6G0618集成电子技术基础教程(上)习题解答.pdf→→/s/1i3mO3fn雷达原理习题解答1.pdf→→/s/13XQ6U高一数学期末复习题及答案.pdf→→/s/1ntlu7g9高中物理必修1、必修2课后习题答案(人教版).pdf→→/s/1jGFSIME高二数列复习题答案.pdf→→/s/1o6lY2nC 高电压技术习题与答案.pdf→→/s/1sjEY8pB 高等代数北大第三版习题全解王萼芳石生明修订.pdf→→/s/1gdn87ZX高等代数_北大第三版_习题答案.pdf.pdf→→/s/1o6lYx6M高等土力学(李广信)1-5章部分习题答案(最新版).pdf→→/s/1jGC4XGa高等教育出版社离散数学课后习题完整答案.pdf→→/s/1dDy2aTb高考数学填空题解答策略.pdf→→/s/1vQmF8 高频电子线路习题答案_张肃文__第五版.pdf→→/s/1nt7Ff1v高鸿业版宏观经济学课后习题答案_%28第十二章到二十三章%29第五版全.pdf→→/s/1sjBAEq5王镜岩生物化学课后习题答案.pdf→→/s/1hqn649e《国际金融学》习题与答案→→/s/1eQ1NKe2 黄达《金融学》精编版(第二版)课后习题答案→→/s/1pJFI9j92014年江南大学微生物学教程(第二版周德庆)考研资料及历年真题答案→→/s/1hq7Pxfm中南大学土木工程材料课后习题及答案→→/s/1o64psNo本资料分上,中,下部三份,欢迎查阅下载建筑装修用花岗岩石材友情赞助。
电气测试技术 林德杰第4版 知识点总结
1,显示功能是测量仪器的基本功能之一,测量仪器有模拟显示和数字显示两种方式。
2,稳定度是由于仪器内部某些随机变化的因素引起的。
例如仪器内部某些因素,周期性变化,漂移或机械部分的摩擦力变化等引起的仪表的示值的变化。
通常它以精密度的数值和时间的长短一起来表示。
3,直接测量有电流表测量电流,用温度计测量温度。
4,直读试测量,直读试测量是根据仪表的读数来判断被测量的大小,从而作为单位的标准量具并不参与比较,为了读取被测量之值,这些仪器已经预先按被测量的单位刻度好分度,因而实际上是被测量与量具间的比较,例如利用万能表测量电流,电压都属于这种测量方法。
5,影响误差,由于各种环境因素与仪器仪表所要求的使用条件不一致而造成的误差成为影响误差。
6,检测:利用各种物理化学效应,选择合适的方法与装置将生产,科研,生活等各方面的有关信息,通过检测与测量的方法赋予定性或者定量结果的过程。
7,记录,显示仪器是将所测得的信号变为一种能为人们所理解的形式,以供人们观察分析,常用显示器分为4类,模拟显示,数字显示,图像显示和记录仪。
8,通信接口和总线用来实现许多测量子系统或测量节点组成的大型检测系统中子系统与上位机之间以及子系统之间的信息交换。
9,信号调理与转换电路:把传感元件输出的电信号转换为方便与显示记录和控制有用的信号电路。
常用的电路有电桥,放大器,振荡器,阻抗变换器等。
例2-21:用二功率表法测量三相三线制电路中的总功率。
设两功率表的 。
级,A I V U s m m 5,3805.0===。
他们的读数分别为W P W P 1785,145521==求测量总功率的系统不确定度。
解:总功||.3240)17851455(1y m 21im in i x f W W P P P εε∂∂∑±==+=+==根据,可求出测量1P 和2P 的局部系统不确定度:W W UI s m 5.9)5380%5.0(%2m 1±=⨯⨯±=±==εε, 由此可得测量总功率的系统不确定度:W W m m pm 19)5.95.9(|)||(|21±=+±=+±=εεε其相对系统不确定度为:%6.0%100324019r ±=⨯±==P pmPm ε 例2-28设电压,电流和电阻的相对误差分别为r U =±%,1r =%,R r =±%,可用三种方案间接测量功率P:1)P=UI ;2P=U2/R 和3,)P=I2/R 。
过程控制仪表及控制系统课后习题答案(林德杰) 2之欧阳引擎创编
lxc第一章思考题与习题欧阳引擎(2021.01.01)1-2 图1.6为温度控制系统,试画出系统的框图,简述其工作原理;指出被控过程、被控参数和控制参数。
解:乙炔发生器中电石与冷水相遇产生乙炔气体并释放出热量。
当电石加入时,内部温度上升,温度检测器检测温度变化与给定值比较,偏差信号送到控制器对偏差信号进行运算,将控制作用于调节阀,调节冷水的流量,使乙炔发生器中的温度到达给定值。
系统框图如下:被控过程:乙炔发生器被控参数:乙炔发生器内温度控制参数:冷水流量1-3 常用过程控制系统可分为哪几类?答:过程控制系统主要分为三类:1. 反馈控制系统:反馈控制系统是根据被控参数与给定值的偏差进行控制的,最终达到或消除或减小偏差的目的,偏差值是控制的依据。
它是最常用、最基本的过程控制系统。
2.前馈控制系统:前馈控制系统是根据扰动量的大小进行控制的,扰动是控制的依据。
由于没有被控量的反馈,所以是一种开环控制系统。
由于是开环系统,无法检查控制效果,故不能单独应用。
3. 前馈-反馈控制系统:前馈控制的主要优点是能够迅速及时的克服主要扰动对被控量的影响,而前馈—反馈控制利用反馈控制克服其他扰动,能够是被控量迅速而准确地稳定在给定值上,提高控制系统的控制质量。
3-4 过程控制系统过渡过程的质量指标包括哪些内容?它们的定义是什么?哪些是静态指标?哪些是动态质量指标?答:1. 余差(静态偏差)e :余差是指系统过渡过程结束以后,被控参数新的稳定值y(∞)与给定值c 之差。
它是一个静态指标,对定值控制系统。
希望余差越小越好。
2.衰减比n:衰减比是衡量过渡过程稳定性的一个动态质量指标,它等于振荡过程的第一个波的振幅与第二个波的振幅之比,即:n <1系统是不稳定的,是发散振荡;n=1,系统也是不稳定的,是等幅振荡;n >1,系统是稳定的,若n=4,系统为4:1的衰减振荡,是比较理想的。
衡量系统稳定性也可以用衰减率φ 4.最大偏差A :对定值系统,最大偏差是指被控参数第一个波峰值与给定值C 之差,它衡量被控参数偏离给定值的程度。
第一章 电气测试技术(课件)(林德杰第三版)
⑤
⑥
⑦
2013-7-17
电气测试技术
第一章 测量的基本概念
9
三、单位制和单位
2013-7-17
电气测试技术
第一章 测量的基本概念
14
6.物质的量的单位——摩[尔](mol] 一系统的物质的量,该系统中所包含的基本单元数与 0.012kg碳-12的原子数目相等(1971年第14届国际计量 大会决定增加的基本单位)。在使用摩时,应指明基本 单元是原于、分子、离子、电子及其它粒子,或是这些 粒子的特定组合。
多种单位制的并存不仅对国际贸易有阻碍作用,而且 不利于各国之间的科学文化交流。因此统一单位制巳 成为各国的共同要求。
11
2013-7-17
电气测试技术
ቤተ መጻሕፍቲ ባይዱ
第一章 测量的基本概念
国际计量委员会(CIPM)在1956年将经过21个国家同意的 计量单位制草案命名为国际单位制,以国际通用符号SI 来表示。 1960年第11届国际计量大会(CGPM)正式通过了SI。 随后一些国际组织,如国际法制计量组织(OIML),国际 标准化组织(ISO)和国际电工委员会(IEC)等也采用了国 际单位制。
电气测试技术 第一章 测量的基本概念
2013-7-17
3
第一章 测量的基本概念 1.1 测量的概念和定义 一、测量的基本方程
测量是人类认识和改造客观世界必不可少的重要手段 之一。人们借助于专门的设备,通过实验方法对客观 事物取得数量信息的过程称为测量。 测量就是以同性质的标准量与被测量比较,并确定被 测量对标准量的倍数,取得用数值和单位共同表示的 测量结果。
过程控制仪表及控制系统_课后习题答案(林德杰) 2

第一章思考题与习题1-2 图1.6为温度控制系统,试画出系统的框图,简述其工作原理;指出被控过程、被控参数和控制参数。
解:乙炔发生器中电石与冷水相遇产生乙炔气体并释放出热量。
当电石加入时,内部温度上升,温度检测器检测温度变化与给定值比较,偏差信号送到控制器对偏差信号进行运算,将控制作用于调节阀,调节冷水的流量,使乙炔发生器中的温度到达给定值。
系统框图如下:被控过程:乙炔发生器被控参数:乙炔发生器内温度控制参数:冷水流量1-3 常用过程控制系统可分为哪几类?答:过程控制系统主要分为三类:1. 反馈控制系统:反馈控制系统是根据被控参数与给定值的偏差进行控制的,最终达到或消除或减小偏差的目的,偏差值是控制的依据。
它是最常用、最基本的过程控制系统。
2.前馈控制系统:前馈控制系统是根据扰动量的大小进行控制的,扰动是控制的依据。
由于没有被控量的反馈,所以是一种开环控制系统。
由于是开环系统,无法检查控制效果,故不能单独应用。
3. 前馈-反馈控制系统:前馈控制的主要优点是能够迅速及时的克服主要扰动对被控量的影响,而前馈—反馈控制利用反馈控制克服其他扰动,能够是被控量迅速而准确地稳定在给定值上,提高控制系统的控制质量。
3-4 过程控制系统过渡过程的质量指标包括哪些内容?它们的定义是什么?哪些是静态指标?哪些是动态质量指标?答:1. 余差(静态偏差)e:余差是指系统过渡过程结束以后,被控参数新的稳定值y(∞)与给定值c 之差。
它是一个静态指标,对定值控制系统。
希望余差越小越好。
2. 衰减比n:衰减比是衡量过渡过程稳定性的一个动态质量指标,它等于振荡过程的第一个波的振幅与第二个波的振幅之比,即:n <1系统是不稳定的,是发散振荡;n=1,系统也是不稳定的,是等幅振荡;n >1,系统是稳定的,若n=4,系统为4:1的衰减振荡,是比较理想的。
衡量系统稳定性也可以用衰减率φ4.最大偏差A :对定值系统,最大偏差是指被控参数第一个波峰值与给定值C 之差,它衡量被控参数偏离给定值的程度。
朱明zhubob-电气测试技术4(林德杰第四版)
不等位电势U0和不等位电阻r0
当磁感应强度B为零、激励电流为额定值IH时, 霍尔电极间的空载电势称为不等位电势(或零位 电势)U0。不等位电势U0与额定激励电流IH之比称 为不等位电阻(零位电阻)r0 . 产生不等位电势的原因主要有:霍尔电极安装 位置不正确(不对称或不在同一等电位面上); 半导体材料的不均匀造成了电阻率不均匀或是几 何尺寸不均匀;激励电极接触不良造成激励电流 不均匀分布等。
5、霍尔传感器的应用 结构简单、体积小、噪声小、频率范围宽、动态 范围大(输出电势变化范围可达1000:1)、寿命长等 特点,因此获得了广泛应用。
• 霍尔位移传感器
输出电势为UH1—UH2。
在初始位置时UH1=VH2,则 输出为零;
当改变磁极系统与霍尔元件 的相对位置时,即可得到输 出电压,其大小正比于位移 量。
第二篇 常用传感器的原理及应用
第9章 磁敏式传感器
1.掌握传感器工作原理及特性 2.掌握测量误差及补偿(霍尔元件)
3.了解传感器的应用
半导体磁敏式传感器
霍尔元件
磁敏电阻
磁敏二极管 磁敏晶体管
电气测试技术林德杰主编

4-1(a )imm xU x xx x U =xi m U U x x =∴(b )m b m ax xU x x U U 210+=(c )221210m m m x xx U x x x x UU ==4-2解:该表在1000kPa 时满量程,此时设B 点向下移动x cm电流表以外做戴维南等效:开路时,V 5.2=A U ,(V)-2.5555.2x xU B =⨯-=开路电压 (V ))5.2(5.2x x U AB =--=等效电阻(去掉5V 电压源,短接)500)100250)(100250(250)5500250//()5500250()500//500(0x x x x R -++=-++=即:此时电流表满量程100div ,即I=100μA=10-4A41005.625500)100250)(100250(250-=+-++=∴x x xI 解得μm 1000cm 1.0==x若B 点下移500μm ,则压力)kPa (50010001000500=⨯=x p4-3解:26Ebh Fl=ε (参见P110,公式4-43)R1、R2的应变:)(200010103102102010663531μεε=⨯⨯⨯⨯⨯⨯⨯=---R3、R4的应变:)(120010103102101210663532μεε=⨯⨯⨯⨯⨯⨯⨯=---∴ )(4.1001020002100100611Ω=⨯⨯⨯+=+=-εRk R R )(6.991020002100100612Ω=⨯⨯⨯-=-=-εRk R R)(24.1001012002100100623Ω=⨯⨯⨯+=+=-εRk R R)(76.991012002100100624Ω=⨯⨯⨯-=-=-εRk R R)V (101001025044)2(3max 2max max =⨯⨯⨯==⇒=-R P U RU P∴)mV (3210)12002000(2210)(2)(462121210=⨯+⨯⨯=+=+++=-εεεεεεk U k U U4-6解: (3)21L F L F f x =xP x P k F =I k k F fI f f =xfI f P P L k k L k I 210=∴(4)%2.05%0.1±=±=i γ4-8解:参见P13512121201109447.235100ln 1085.8)129.2(2ln )(2--⨯=⨯⨯-=-=πεεπR R kkx C =∆∴位移(m)176.4109447.23101001212=⨯⨯=∆=--k C x即液位为m 176.4m 5±4-9解:参见P137例题,E1、E2相等于R3、R4,C 即C0,按例题步骤可得:h k k C E 211=θ4-11解:错配S 型热电偶冷端补偿器修正至0℃的热电动势为:)0,20()0,40()0,700(E S E E E E t K E E E +∆+-=查附录B :μV 53110)0,700(=E E ;μV 2419)0,40(=E E ;μV 1192)0,20(=E E)0,20()0,40(S S S E E t K -=∆查附录A :μV235)0,40(=S E ;μV113)0,20(=S E)μV (122113235=-=∆∴t K S)μV (520051192122241953110=++-=∴E E查附录A :μV 51513)0,680(=E E ;μV 52312)0,690(=E E686105151352312)5151352005(680=--+=∴t ℃测量误差%2%100700700686-=⨯-=γ4-14解:显示结果正比于mic a in F C C Cd U ++=33,设比例系数为k则有 mF k 1212101001020080--⨯⨯=设电缆2m 时显示值为x ,则有mF xk 121210)25100(10200--⨯+⨯=,显然,x=64(g )测量误差%20%100808064-=⨯-=γ4-18解:(km/h)144)m/s (401041011010642==⨯⨯⨯=-v4-20解:IB k U H H =)T 10(5481604-⨯=⨯==∴I k U B H H在测量范围内线性)MPa (11050100243=⨯⨯--=∴--x P1. 测量精度分为:正确度、精密度、准确度。
过程控制仪表及控制系统课后习题答案林德杰2

lxc第一章思考题与习题1-2 图1.6为温度控制系统,试画出系统的框图,简述其工作原理;指出被控过程、被控参数和控制参数。
解:乙炔发生器中电石与冷水相遇产生乙炔气体并释放出热量。
当电石加入时,内部温度上升,温度检测器检测温度变化与给定值比较,偏差信号送到控制器对偏差信号进行运算,将控制作用于调节阀,调节冷水的流量,使乙炔发生器中的温度到达给定值。
系统框图如下:被控过程:乙炔发生器被控参数:乙炔发生器内温度控制参数:冷水流量1-3 常用过程控制系统可分为哪几类?答:过程控制系统主要分为三类:1. 反馈控制系统:反馈控制系统是根据被控参数与给定值的偏差进行控制的,最终达到或消除或减小偏差的目的,偏差值是控制的依据。
它是最常用、最基本的过程控制系统。
2.前馈控制系统:前馈控制系统是根据扰动量的大小进行控制的,扰动是控制的依据。
由于没有被控量的反馈,所以是一种开环控制系统。
由于是开环系统,无法检查控制效果,故不能单独应用。
3. 前馈-反馈控制系统:前馈控制的主要优点是能够迅速及时的克服主要扰动对被控量的影响,而前馈—反馈控制利用反馈控制克服其他扰动,能够是被控量迅速而准确地稳定在给定值上,提高控制系统的控制质量。
3-4 过程控制系统过渡过程的质量指标包括哪些内容?它们的定义是什么?哪些是静态指标?哪些是动态质量指标?答:1. 余差(静态偏差)e:余差是指系统过渡过程结束以后,被控参数新的稳定值y(∞)与给定值c 之差。
它是一个静态指标,对定值控制系统。
希望余差越小越好。
2. 衰减比n:衰减比是衡量过渡过程稳定性的一个动态质量指标,它等于振荡过程的第一个波的振幅与第二个波的振幅之比,即:n <1系统是不稳定的,是发散振荡;n=1,系统也是不稳定的,是等幅振荡;n >1,系统是稳定的,若n=4,系统为4:1的衰减振荡,是比较理想的。
衡量系统稳定性也可以用衰减率φ4.最大偏差A :对定值系统,最大偏差是指被控参数第一个波峰值与给定值C 之差,它衡量被控参数偏离给定值的程度。
电气与电子测量技术课后习题答案

故
3-7影响电涡流传感器等效阻抗的因数有哪些?根据这些影响因数,推测电涡流传感器能测量哪些物理量?
解:
图3-7变压器式交流电桥
图3-7的交流电桥图中,当衔铁向上移动和向下移动相同距离时,其输出大小相等,方向相反。由于电源电压是交流,所以尽管式中有正负号,还是无法加以分辨。可采用带有相敏整流的交流电路,如图3-8所示。
图3-8相敏整流交流电路
当衔铁处于中间位置时,Z1=Z2=Z0,电桥处于平衡状态,输出电压 ;当衔铁上移,使上线圈阻抗增大,Z1=Z0+Z,而下线圈阻抗减少,Z2=Z0Z。
3-12光电二极管的基本原理是什么?在电路中使用光电二极管时,与普通二极管的接线有何不同?
解:光敏二极管是基于半导体光生伏特效应原理制成的光电元器件。光敏二极管工作时外加反向工作电压,在没有光照射时,反向电阻很大,反向电流很小,此时光敏二极管处于截止状态。当有光照射时,在PN结附近产生光生电子和空穴对,从而形成由N区指向P区的光电流,此时光敏二极管处于导通状态。所以与普通二极管不同,光敏二极管需要反向介入电路。
图压电传感器的等效电路
由于外力作用而在压电材料上产生的电荷只有在无泄漏的情况下才能保存,即需要测量回路具有无限大的输入阻抗,这实际上是不可能的,因此压电式传感器不能用于静态测量。压电材料在交变力的作用下,电荷可以不断补充,以供给测量回路一定的电流,故适用于动态测量。
3-9分析为什么压电传感器的调理电路不能用一般的电压放大器,而要用电荷放大器?
过程控制仪表及控制系统课后习题答案(林德杰)2

lxc第一章思考题与习题1-2 图1.6为温度控制系统,试画出系统的框图,简述其工作原理;指出被控过程、被控参数和控制参数。
解:乙炔发生器中电石与冷水相遇产生乙炔气体并释放出热量。
当电石加入时,部温度上升,温度检测器检测温度变化与给定值比较,偏差信号送到控制器对偏差信号进行运算,将控制作用于调节阀,调节冷水的流量,使乙炔发生器中的温度到达给定值。
系统框图如下:被控过程:乙炔发生器被控参数:乙炔发生器温度控制参数:冷水流量1-3 常用过程控制系统可分为哪几类?答:过程控制系统主要分为三类:1. 反馈控制系统:反馈控制系统是根据被控参数与给定值的偏差进行控制的,最终达到或消除或减小偏差的目的,偏差值是控制的依据。
它是最常用、最基本的过程控制系统。
2.前馈控制系统:前馈控制系统是根据扰动量的大小进行控制的,扰动是控制的依据。
由于没有被控量的反馈,所以是一种开环控制系统。
由于是开环系统,无法检查控制效果,故不能单独应用。
3. 前馈-反馈控制系统:前馈控制的主要优点是能够迅速及时的克服主要扰动对被控量的影响,而前馈—反馈控制利用反馈控制克服其他扰动,能够是被控量迅速而准确地稳定在给定值上,提高控制系统的控制质量。
3-4 过程控制系统过渡过程的质量指标包括哪些容?它们的定义是什么?哪些是静态指标?哪些是动态质量指标?答:1. 余差(静态偏差)e:余差是指系统过渡过程结束以后,被控参数新的稳定值y(∞)与给定值c 之差。
它是一个静态指标,对定值控制系统。
希望余差越小越好。
2. 衰减比n:衰减比是衡量过渡过程稳定性的一个动态质量指标,它等于振荡过程的第一个波的振幅与第二个波的振幅之比,即:n <1系统是不稳定的,是发散振荡;n=1,系统也是不稳定的,是等幅振荡;n >1,系统是稳定的,若n=4,系统为4:1的衰减振荡,是比较理想的。
衡量系统稳定性也可以用衰减率φ4.最大偏差A :对定值系统,最大偏差是指被控参数第一个波峰值与给定值C 之差,它衡量被控参数偏离给定值的程度。
《电气测试技术》课程习题.doc.gzip

《电气测试技术》课程习题第1章到第4章习题一、填空题1、测试技术包括测量和试验两方面.凡需要考察事物的状态、变化和特征等,并要对它进行定量的描述时,都离不开测试工作。
2、按是否直接测定被测量的原则分类,测试方法分直接测量法和间接测量法。
3、按测量时是否与被测对象接触的原则分类,测试方法分接触式测量法和非接触式测量法。
4、按测量时是否随时间的原则分类,测试方法分静态测量法和动态测量法。
5、测量误差一般按其性质分类分为系统误差、随机误差和粗大误差。
6、传感器是测试系统的第一环节,将被测系统或测试过程中需要观测的信息转化为人们熟悉的各种信号。
7、传感器的基本功能是检测信号和信号转换。
8、传感器的组成按定义一般由敏感元件、变换元件、信号调理电路三部分组成。
9、传感器按信号变换特征分类;可分为结构型传感器和物理型传感器。
10、结构型传感器是依据传感器的结构参数变化而实现信号变换的。
11、物理型传感器在实现变换过程中传感器的结构参数基本不变,而仅依靠传感器中原件内部的物理和化学性质变化实现传感器功能。
12、按测量原理分类一般包括电阻式、电感式和电容式三种基本形式,以及由此而派生出来的其他形式传感器。
13、按传感器的能量转换情况分类可分为能量控制型和能量转换型传感器。
14、传感器所能测量的最大被测量的数值称为测量上限,最小的被测量值称为测量下限,用它们来表示测量区间称测量范围。
15、在采用直线拟合线性化时输出输入的校正曲线与其拟合直线之间的最大偏差称为非线性误差或线性度,常用相对误差表示。
16、传感器输出的变化量ΔY与引起此变化量X之比称为静态灵敏度(或简答什么是灵敏度)17、静态误差(精度)是指传感器在其全量程内任一点的输出值与理论输出值的偏差程度。
18、传感器的动态特性是指传感器对随时间变化的输入量的响应特性。
19、引用误差是指测量的绝对误差与仪器的满量程之比。
20、传感器的标定是指在明确传感器的输出与输入关系的前提下,利用某种标准器具对传感器进行标度。
电气测量(5版)课后习题答案

第一章1. 231V ,10V ,4.5%2. 0.1A ,1.25%,1.0级3. ±3V ,±1.0%,±3V ,±1.5%4. 0.5级,%42.0%10030025.1±=⨯±,应选0.2级,%25.0%10050025.1±=⨯±,应选0.2级5. 75.0±格,±0.54%,±1.88%6. ()%08.022±=++±=N R U K P γγγγ 7. 乙表第二章 1. 0.3Ω2. 50 k Ω,100 k Ω,150 k Ω,/V k 31Ω,0.2 W ,0.1 W ,0.067 W 3. 30Ω,29.97Ω,0.05Ω 4. 1.5Ω,0.375Ω5. 3750Ω,7500Ω,11.25kΩ,25Ω/V ,6. 40V ,60V ,27.03V ,40.54V7. ⎪⎪⎩⎪⎪⎨⎧=+=+08.02091.09s s ssR U R U ,可求得⎩⎨⎧Ω== 791V 80s s R U ,电路的实际电流为101 mA 。
8. ⎪⎪⎩⎪⎪⎨⎧=+=+1091001001005050ss ssR U R U ,可求得⎩⎨⎧Ω==k 89.9V 78.119s s R U ,电路的实际电压为120 V 。
9. 5940 V ,70 A10. 所带负载为额定负载的25% ~ 100%,所以应该是内阻为0.3 A 的电流表。
11. 已知:m 2=l ,mm 50=d 。
求:I 和I S 。
解法一:025.0205.02tan ===l d α,可得 43.12=α A 1029.410343.11010--⨯=⨯⨯=Idiv/A 103110311010⨯=⨯=-I S 解法二: 43.13.141800.025rad 025.0205.02=⨯===α其余与解法一同。
过程控制仪表及控制系统课后习题答案(林德杰) 2之欧阳体创编
lxc第一章思考题与习题时间:2021.02.03 创作:欧阳体1-2 图1.6为温度控制系统,试画出系统的框图,简述其工作原理;指出被控过程、被控参数和控制参数。
解:乙炔发生器中电石与冷水相遇产生乙炔气体并释放出热量。
当电石加入时,内部温度上升,温度检测器检测温度变化与给定值比较,偏差信号送到控制器对偏差信号进行运算,将控制作用于调节阀,调节冷水的流量,使乙炔发生器中的温度到达给定值。
系统框图如下:被控过程:乙炔发生器被控参数:乙炔发生器内温度控制参数:冷水流量1-3 常用过程控制系统可分为哪几类?答:过程控制系统主要分为三类:1. 反馈控制系统:反馈控制系统是根据被控参数与给定值的偏差进行控制的,最终达到或消除或减小偏差的目的,偏差值是控制的依据。
它是最常用、最基本的过程控制系统。
2.前馈控制系统:前馈控制系统是根据扰动量的大小进行控制的,扰动是控制的依据。
由于没有被控量的反馈,所以是一种开环控制系统。
由于是开环系统,无法检查控制效果,故不能单独应用。
3. 前馈-反馈控制系统:前馈控制的主要优点是能够迅速及时的克服主要扰动对被控量的影响,而前馈—反馈控制利用反馈控制克服其他扰动,能够是被控量迅速而准确地稳定在给定值上,提高控制系统的控制质量。
3-4 过程控制系统过渡过程的质量指标包括哪些内容?它们的定义是什么?哪些是静态指标?哪些是动态质量指标?答:1. 余差(静态偏差)e :余差是指系统过渡过程结束以后,被控参数新的稳定值y(∞)与给定值c 之差。
它是一个静态指标,对定值控制系统。
希望余差越小越好。
2.衰减比n:衰减比是衡量过渡过程稳定性的一个动态质量指标,它等于振荡过程的第一个波的振幅与第二个波的振幅之比,即:n <1系统是不稳定的,是发散振荡;n=1,系统也是不稳定的,是等幅振荡;n >1,系统是稳定的,若n=4,系统为4:1的衰减振荡,是比较理想的。
衡量系统稳定性也可以用衰减率φ 4.最大偏差A :对定值系统,最大偏差是指被控参数第一个波峰值与给定值C 之差,它衡量被控参数偏离给定值的程度。
电气测试技术林德杰课后答案
电气测试技术课后答案第一章1-1测量仪表应具有哪些基本功能?答:应具有变换、选择、比较和选择 4种功能1-2精密度、准确度和精确度的定义及其三者的相互关系如何?答:精密度表示指示值的分散程度,用 S 表示。
S 越小,精密度越高;反之,S 越 大,精密度越低。
准确度是指仪表指示值偏离真值得程度,用 £表示。
&越小,准确度 越高;反之,&越大,准确度越低。
精确度是精密度和准确度的综合反映,用 T 表示。
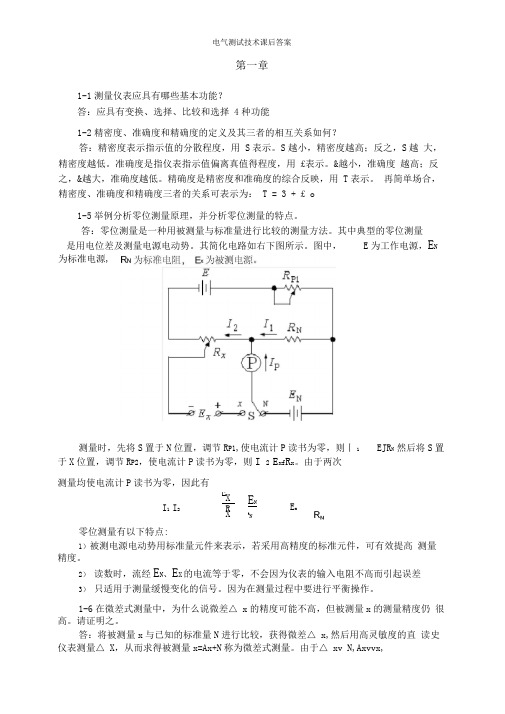
再简单场合,精密度、准确度和精确度三者的关系可表示为: T = 3 + £ o1-5举例分析零位测量原理,并分析零位测量的特点。
答:零位测量是一种用被测量与标准量进行比较的测量方法。
其中典型的零位测量 是用电位差及测量电源电动势。
其简化电路如右下图所示。
图中, E 为工作电源,E N测量时,先将S 置于N 位置,调节R P1,使电流计P 读书为零,则丨1EJR N 然后将S 置于X 位置,调节R P2,使电流计P 读书为零,则I 2 E xf R x 。
由于两次 测量均使电流计P 读书为零,因此有零位测量有以下特点:1)被测电源电动势用标准量元件来表示,若采用高精度的标准元件,可有效提高 测量精度。
2) 读数时,流经E N 、E X 的电流等于零,不会因为仪表的输入电阻不高而引起误差3) 只适用于测量缓慢变化的信号。
因为在测量过程中要进行平衡操作。
1-6在微差式测量中,为什么说微差△ x 的精度可能不高,但被测量x 的测量精度仍 很高。
请证明之。
答:将被测量x 与已知的标准量N 进行比较,获得微差△ x,然后用高灵敏度的直 读史仪表测量△ X ,从而求得被测量x=Ax+N 称为微差式测量。
由于△ x v N,Axvvx,I 1 I 2EX R XE NRNE x为标准电源,故测量微差△ x 的精度可能不高,但被测量x 的测量精度仍然很高第二章题2-2 解:⑴ △ A= 77.8— 80= — 2.2 (mA) c=— △ A= 2.2 ( mA)△ A -2 2 Y 100% 100% 2.75%A 80x(2) 0m- 100% 2.2% X m故可定为s= 2.5级。
电气测试技术第三版-课后习题答案(林德杰)

气测试技术第三版-课后习题答案(林德杰)l第一章思考题与习题1-2 图1.6为温度控制系统,试画出系统的框图,简述其工作原理;指出被控过程、被控参数和控制参数。
解:乙炔发生器中电石与冷水相遇产生乙炔气体并释放出热量。
当电石加入时,内部温度上升,温度检测器检测温度变化与给定值比较,偏差信号送到控制器对偏差信号进行运算,将控制作用于调节阀,调节冷水的流量,使乙炔发生器中的温度到达给定值。
系统框图如下:被控过程:乙炔发生器被控参数:乙炔发生器内温度控制参数:冷水流量1-3 常用过程控制系统可分为哪几类?答:过程控制系统主要分为三类:1. 反馈控制系统:反馈控制系统是根据被控参数与给定值的偏差进行控制的,最终达到或消除或减小偏差的目的,偏差值是控制的依据。
它是最常用、最基本的过程控制系统。
2.前馈控制系统:前馈控制系统是根据扰动量的大小进行控制的,扰动是控制的依据。
由于没有被控量的反馈,所以是一种开环控制系统。
由于是开环系统,无法检查控制效果,故不能单独应用。
3. 前馈-反馈控制系统:前馈控制的主要优点是能够迅速及时的克服主要扰动对被控量的影响,而前馈—反馈控制利用反馈控制克服其他扰动,能够是被控量迅速而准确地稳定在给定值上,提高控制系统的控制质量。
3-4 过程控制系统过渡过程的质量指标包括哪些内容?它们的定义是什么?哪些是静态指标?哪些是动态质量指标?答:1. 余差(静态偏差)e:余差是指系统过渡过程结束以后,被控参数新的稳定值y(∞)与给定值c之差。
它是一个静态指标,对定值控制系统。
希望余差越小越好。
2. 衰减比n:衰减比是衡量过渡过程稳定性的一个动态质量指标,它等于振荡过程的第一个波的振幅与第二个波的振幅之比,即:n <1系统是不稳定的,是发散振荡;n=1,系统也是不稳定的,是等幅振荡;n >1,系统是稳定的,若n=4,系统为4:1的衰减振荡,是比较理想的。
衡量系统稳定性也可以用衰减率φ 4.最大偏差A :对定值系统,最大偏差是指被控参数第一个波峰值与给定值C 之差,它衡量被控参数偏离给定值的程度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电气测试技术林德杰课后答案1-1 答:应具有变换、选择、比较和选择4种功能。
1-2 答:精密度表示指示值的分散程度,用δ表示。
δ越小,精密度越高;反之,δ越大,精密度越低。
准确度是指仪表指示值偏离真值得程度,用ε表示。
ε越小,准确度越高;反之,ε越大,准确度越低。
精确度是精密度和准确度的综合反映,用τ表示。
再简单场合,精密度、准确度和精确度三者的关系可表示为:τ=δ+ε。
1-5 答:零位测量是一种用被测量与标准量进行比较的测量方法。
其中典型的零位测量是用电位差及测量电源电动势。
其简化电路如右下图所示。
图中,E 为工作电源,E N 为标准电源,R N 为标准电阻,E x 为被测电源。
测量时,先将S 置于N 位置,调节R P1,使电流计P 读书为零,则N N 1R E I =。
然后将S 置于x 位置,调节R P2,使电流计P 读书为零,则x x R E I =2。
由于两次测量均使电流计P 读书为零,因此有N NN N 21E R R E R E xR x EI I xx =⇒=⇒= 零位测量有以下特点:1) 被测电源电动势用标准量元件来表示,若采用高精度的标准元件,可有效提高测量精度。
2) 读数时,流经E N 、E x 的电流等于零,不会因为仪表的输入电阻不高而引起误差。
3) 只适用于测量缓慢变化的信号。
因为在测量过程中要进行平衡操作。
1-6答:将被测量x 与已知的标准量N 进行比较,获得微差△x ,然后用高灵敏度的直读史仪表测量△x ,从而求得被测量x =△x +N 称为微差式测量。
由于△x <N ,△x <<x ,故测量微差△x 的精度可能不高,但被测量x 的测量精度仍然很高。
题2-2 解:(1) ΔA =77.8-80=-2.2(mA ) c =-ΔA =2.2(mA ) %.%.-%A ΔA γA 7521008022100=⨯=⨯=(2)%.%x x mmm 221000=⨯∆=γ 故可定为s =2.5级。
题2-3解:采用式(2-9)计算。
(1)用表①测量时,最大示值相对误差为: %.%.x x %s m xm 052020050±=⨯±=±=γ (2)用表②测量时,最大示值相对误差为: %.%.x x %s m xm 753203052±=⨯±=±=γ 前者的示值相对误差大于后者,故应选择后者。
题2-4解:五位数字电压表±2个字相当于±0.0002V 。
1410.01%0.00020.01%40.0002610Vx U U ∆-=±±=±⨯±=±⨯()4111610100%100%0.015%4U r U ∆-±⨯=⨯=⨯=±2420.01%0.00020.01%0.10.00022.110Vx U U ∆-=±±=±⨯±=±⨯()421 2.110100%100%0.21%0.1x U r U ∆-±⨯=⨯=⨯=±题2-5解:已知0.1%N Ns N∆==±,s =0.1级9V N U =,10V x U =,1V x N U U U ∆=-=根据式(2-34)%.U U%U U NN N x 40100±≤∆+⨯∆=δγγ 即 10.1%0.4%9r δ±+≤±0.4%0.1%0.5%9r δ≤±+±=± ∴ 4.5%r δ≤±m 1%% 4.5%1x r s s x δ=±=±≤Q ∴可选择m =1V U ,s=2.5级电压表。
题2-6解:(1)1211501.07HZ 12i i x x ===∑(2)求剩余误差i i v x x =-,则1234567891011120.220.250.280.10.030.9610.130.430.530.370.270.51v v v v v v v v v v v v =-=-=-=-======-=-=-;;;;;;;;;;;; 求1210.020i i v ==≈∑,说明计算x 是正确的。
(3)求标准差估计值ˆσ,根据贝塞尔公式ΩΩ(4)求系统不确定度,P =99%,n =12,查表2-3,及a t =3.17,ˆ 3.170.44 1.39a t λσ==⨯= im v λ<,故无坏值。
(5)判断是否含有变值系差 ① 马列科夫判据612170.14i i i i v v ∆===-=-∑∑(-0.25)=0.35Ω,故数据中无线性系差。
② 阿卑-赫梅特判据21i i v v +21111σˆn vv i n i i ->+-=∑ 即0.6450.642≈ 可以认为无周期性系差。
(6)求算术平均值标准差ˆx σ-ˆˆ0.12x σ-=== (7)P =99%,n =12 , 3.17a t =则3.170.120.38x λ=⨯=(8)写出表达式 f =501.07±0.38 HZ0.070.38<Q 故0.07是不可靠数字,可写成f =501±0.38 HZ 题2-7解:依题意,该表的基本误差为m m 55m0.03%0.002%0.003%0.50.002%13.510V3.510100%100%0.007%0.49946x x U U U U r Ux ∆∆--=±±=±⨯±⨯=±⨯±⨯=⨯=⨯=±题2-8解:m n p x A B C =上式取对数得:ln ln ln ln x m A n B p C =++ 然后微分得:dx dA dB dCm n px A B C=++ x A B C r mr nr pr ∴=++由于A B C r r r 、、为系统不确定度,从最大误差出发得12 2.03 1.0 2.528.25%x A B C r mr nr pr =±++=±⨯+⨯+⨯=±()(%%%)题2-9解:伏安法测得的电阻为:39.8200Ω4910x x x U R I -===⨯ 由图2-14可见,电流档内阻压降为V 940055049..U A =⨯=x R 两端的实际电压为V 9494890...U U U A x x =-=-=因此x R 的实际值为: Ω=Ω===10010499400k ..I U R x x x 测量误差为%%%R R R γx x x R 10010010010020010000=⨯-=⨯-=该方法由于电流档的内阻压降大(电流档内阻大),误差比较大。
为了减小误差,应将电压表由B 接至C 点。
题2-10解:依图2-10用伏安法测得的电阻为64.50.5M Ω9010x x x U R I -===⨯已知万用表的灵敏度20K Ω/V R k =,则其内阻为 0K m 20501M ΩR k U ==⨯= 由于0x R //0R 即00000010.5M Ω1x x x x R R R R R R ⨯==++01M Ωx R ∴=测量误差为 000.51100%100%50%1x x x x R R r R --=⨯=⨯=- 由于0x R 较大,所用电压档内阻0R 有限,引起误差较大。
为了减小误差,应将电压表由C 点改接至B 点。
题2-11解:(1)串联总电阻12 5.1 5.110.2K ΩR R R =+=+= 根据式(2-48)可得串联电阻相对误差为12121212 5.1 5.15.0% 1.0%10.210.22.5%0.5% 3.0%x R R R R r r r R R R R =±+=±⨯+⨯++±+±()()=()=(2)两电阻并联总电阻1212 5.12.55K Ω10.2R R R R R ===+根据式(2-50)得12211212 5.1 5.11.0% 5.0%10.210.20.5%2.5%3.0%x R R R R r r r R R R R =±+=±⨯+⨯++±+±()()=()=(3)若两电阻的误差12 2.5%R R r r ==±,得 ①串联总电阻为R=10.2K Ω()%.%.%.%.R R R %.R R R R 522512515252212211±=+±=⎪⎪⎭⎫ ⎝⎛⨯++⨯+±=γ ②并联总电阻R=1/2×5.1=2.55K Ω()%.%.%.%.R R R%.R R R R 522512515252211212±=+±=⎪⎪⎭⎫⎝⎛⨯++⨯+±=γ 题2-12解:参考P38例2-2112350034006900W P P P =+=+=12% 1.0%3801038W m m s UI εε==±=±⨯⨯=±12W Pm m m εεε=±+±±()=(38+38)=76pmpm 76100%100% 1.10%P6900r ε∴=⨯=±⨯=± 题2-13解:依题意2U W t R=为幂函数,则根据式(2-45)得 22 1.5 1.00.1 4.1W U R t r r r r =±++=±⨯++=±()(%%%)% 题2-14解:该电子仪表说明书指出了六项误差,分别为:①基本误差m 14%1.5%2.0%3x r s x =±=±=± ②温度附加误差20.1%3020 1.0%r =±-=±() ③电压附加误差30.06%22010 1.32%r =±⨯⨯=±% ④频率附加误差4 1.0r =±% ⑤湿度附加误差50.2r =±% ⑥换集成块附加误差60.2r =±%由于误差项较多,用方和根合成法比较合理,总的误差为:r == 2.8%=±题2-15解:m 12 2.0%4545 2.0% 1.8V U U U ∆=±+⨯=±+⨯=±()() m12 1.80.9V n2U U U ∆∆∆±====± 1m %%500.9V U s U s ∆=±⨯=±⨯≤±0.9%100% 1.8%50s ∴≤±⨯=± 选择s=1.5故选m U =50V ,s=1.5电压表。