系统仿真算法
N_K系统可靠度及备件量的仿真计算方法
算系统可靠度是不合适的 采用下面的方法求 R(t)
将 t 分别和 T1∗,T2∗,LL,TL∗ 作比较 若 t >Ti 则说明在第
i 次仿真中 系统在 t 到达之前就已失效 将这种情况记为
0 反之则记为 1 设 Ii 为第 i 次的结果 由于 Ii 只能为 0
或 1 可将其看作是 L 次独立的 0-1 分布的样本观察值 有
fj L
S < S1∗
S
∗ i
≤
S
<
S
∗ i +1
,
i
= 1,2,L, q
−1
(5)
1
S
≥
S
∗ q
满足下述条件的 S∗j 即为在任务期 Ta 内
为 R 所需的最优储备量
IF Nis >0 THEN
从旧备件仓队列头部取出备件 J 替换损坏部件 L 并估计 J 的剩余寿
命 WKTIME
设定 ITW 号工位下次发生部件损坏的时间 TW[ITW ] = Tsim +WKTIME
预置备件 J 下次发生故障时的累积使用寿命
TWA[J ] = TWA[J] +WKTIME
Nis = Nis -1
ELSE
从新备件池中取一新备件 J 替换损坏部件 并置 N get = Nget +1
估计新备件 J 的寿命 WKTIME
I 设定 TW 号工位下次发生部件损坏的时间 TW[ITW ] = +WKTIME
预置新备件 J 下次损坏时的累积使用寿命
TWA[J ]= TWA[J ]+WKTIME
END IF
ZHOU Jiang-hua, XIAO Gang, SUN Guo-ji
RLS算法及其仿真
RLS算法及其仿真RLS(Recursive Least Square)算法是一种用于递归估计的算法,主要用于实现自适应滤波器和系统的参数估计。
本文将对RLS算法以及其仿真进行阐述。
首先,我们来介绍一下RLS算法的基本原理。
RLS算法是一种在线递归最小二乘算法,主要用于估计线性滤波器的权值。
该算法通过不断地更新权值来最小化滤波器的误差平方和。
RLS算法的基本原理如下:1.初始化滤波器权值为一些初始值,并初始化协方差矩阵P和增益向量K。
2.递归更新增益向量K和协方差矩阵P:K=P*H'/(H*P*H'+λ)P=(I-K*H)*P/λ其中,H是输入信号的延迟版本,λ是正则化参数,I是单位矩阵。
3.更新滤波器权值:w=w+K*(d-H*w)其中,w是滤波器的权值向量,d是期望输出信号。
4.重复步骤2和3,不断地更新滤波器的权值,直到收敛或达到一些停止条件。
接下来,我们将通过仿真来展示RLS算法的性能。
我们将使用MATLAB软件来进行仿真。
首先,我们定义一个输入信号x,并假设期望输出信号d是x的加权和加上一些噪声。
我们可以通过下面的代码来生成输入信号和期望输出信号:```MATLABn=1000;%生成1000个采样点x = randn(1, n); % 生成正态分布的随机数作为输入信号w_true = [0.5, -0.3, 0.2]'; % 真实的权值向量d = conv(w_true, x); % 计算期望输出信号d = d + 0.1 * randn(size(d)); % 加入噪声```接下来,我们使用RLS算法来估计滤波器的权值。
我们可以通过下面的代码来实现RLS算法的仿真:```MATLABlambda = 0.99; % 正则化参数w = zeros(length(w_true), 1); % 初始化权值向量P = eye(length(w_true)); % 初始化协方差矩阵for i = 1:nH = [x(i), x(max(i-1, 1)), x(max(i-2, 1))]'; % 构造输入信号的延迟版本K = P * H / (H' * P * H + lambda); % 更新增益向量P = (eye(length(w_true)) - K * H') * P / lambda; % 更新协方差矩阵e(i)=d(i)-H'*w;%计算误差信号w=w+K*e(i);%更新权值向量end```最后,我们可以绘制出估计的权值和真实的权值之间的比较图,以及估计的输出信号和期望输出信号之间的比较图。
ads的仿真优化算法 -回复

ads的仿真优化算法-回复什么是ADS仿真优化算法?ADS(Automated Design Space Exploration)仿真优化算法是一种用于自动化设计空间探索的方法。
它主要用于电路和系统级设计,通过在设计过程中进行仿真和优化,寻找最佳设计参数和方案。
为什么需要仿真优化算法?在电路和系统设计的过程中,设计师需要考虑多个参数和约束条件,如功耗、性能和可靠性等。
传统的手工设计和调整方法往往耗时耗力,并且很难找到全局最优解。
而ADS仿真优化算法则可以自动地对设计进行全面的评估和搜索,从而寻找最佳的设计方案。
ADS仿真优化算法的基本原理ADS仿真优化算法主要包含以下几个步骤:建模、仿真、评估和优化。
在建模阶段,设计师通过选择适当的模型和参数来表示设计的特性以供仿真使用。
仿真阶段通过对设计进行电路级或系统级的仿真来评估设计的性能。
评估阶段对仿真结果进行统计和分析,以得到设计的可行性和缺陷。
最后,在优化阶段,优化算法根据评估结果自动地搜索和调整设计参数,以找到最佳的设计方案。
常用的ADS仿真优化算法1. Genetic Algorithm(遗传算法):遗传算法是一种通过模拟生物进化的过程来寻找最优解的优化算法。
它通过选择、交叉和变异等操作来生成新的设计解,并根据适应度函数对解空间进行搜索。
2. Particle Swarm Optimization(粒子群优化算法):粒子群优化算法模拟了鸟群或鱼群等集体行为,通过建立多个粒子在解空间中的移动和寻找最优位置的过程来进行设计优化。
3. Simulated Annealing(模拟退火算法):模拟退火算法是基于固体退火过程的一种优化算法。
它通过在解空间中接受更差的解的概率逐渐降低的方式来搜索全局最优解。
4. Tabu Search(禁忌搜索算法):禁忌搜索算法通过维护一个禁忌列表来避免搜索过程中的回溯,从而更好地探索解空间。
ADS仿真优化算法的应用案例ADS仿真优化算法在电路和系统设计的各个领域都有广泛的应用。
电力仿真算法实验报告

一、实验目的本次实验旨在通过电力系统仿真软件对电力系统进行仿真分析,验证电力系统仿真算法的有效性,并进一步了解电力系统在不同运行条件下的稳定性和性能。
实验内容包括电力系统潮流计算、暂态稳定分析、短路电流计算等。
二、实验内容1. 电力系统潮流计算(1)实验背景:以某地区110kV电网为例,分析该电网在不同运行方式下的潮流分布。
(2)实验步骤:① 利用电力系统仿真软件建立110kV电网模型;② 设置电网参数,包括各节点电压、线路参数等;③ 运行潮流计算程序,得到潮流分布结果;④ 分析潮流分布结果,判断电网的稳定性。
2. 电力系统暂态稳定分析(1)实验背景:以某地区110kV电网为例,分析该电网在发生单相接地故障时的暂态稳定性。
(2)实验步骤:① 利用电力系统仿真软件建立110kV电网模型;② 设置电网参数,包括各节点电压、线路参数等;③ 设置故障参数,包括故障类型、故障位置等;④ 运行暂态稳定分析程序,得到暂态稳定结果;⑤ 分析暂态稳定结果,判断电网的稳定性。
3. 电力系统短路电流计算(1)实验背景:以某地区110kV电网为例,计算电网在发生短路故障时的短路电流。
(2)实验步骤:① 利用电力系统仿真软件建立110kV电网模型;② 设置电网参数,包括各节点电压、线路参数等;③ 设置故障参数,包括故障类型、故障位置等;④ 运行短路电流计算程序,得到短路电流结果;⑤ 分析短路电流结果,判断电网的短路容量。
三、实验结果与分析1. 电力系统潮流计算结果通过潮流计算,得到110kV电网在不同运行方式下的潮流分布。
结果表明,在正常运行方式下,电网的潮流分布合理,节点电压满足要求。
在故障运行方式下,电网的潮流分布发生较大变化,部分节点电压超出了允许范围。
2. 电力系统暂态稳定分析结果通过暂态稳定分析,得到110kV电网在发生单相接地故障时的暂态稳定结果。
结果表明,在故障发生初期,电网暂态稳定,但故障持续一段时间后,电网发生暂态失稳。
仿真算法知识点总结

仿真算法知识点总结一、简介仿真算法是一种通过生成模型和运行模拟来研究系统或过程的方法。
它是一种用计算机模拟真实世界事件的技术,可以用来解决各种问题,包括工程、商业和科学领域的问题。
仿真算法可以帮助研究人员更好地理解系统的行为,并预测系统未来的发展趋势。
本文将对仿真算法的基本原理、常用技术和应用领域进行总结,以期帮助读者更好地了解和应用仿真算法。
二、基本原理1. 离散事件仿真(DES)离散事件仿真是一种基于离散时间系统的仿真技术。
在离散事件仿真中,系统中的事件和状态都是离散的,而时间是连续变化的。
离散事件仿真通常用于建模和分析复杂系统,例如生产线、通信网络和交通系统等。
离散事件仿真模型可以用于分析系统的性能、验证系统的设计和决策支持等方面。
2. 连续仿真(CS)连续仿真是一种基于连续时间系统的仿真技术。
在连续仿真中,系统中的状态和事件都是连续的,而时间也是连续的。
连续仿真通常用于建模和分析动态系统,例如电力系统、控制系统和生态系统等。
连续仿真模型可以用于分析系统的稳定性、动态特性和系统参数的设计等方面。
3. 混合仿真(HS)混合仿真是一种同时兼具离散事件仿真和连续仿真特点的仿真技术。
混合仿真可以用于建模和分析同时包含离散和连续过程的系统,例如混合生产系统、供应链系统和环境系统等。
混合仿真模型可以用于分析系统的整体性能、协调离散和连续过程以及系统的优化设计等方面。
4. 随机仿真随机仿真是一种基于概率分布的仿真技术。
在随机仿真中,系统的状态和事件都是随机的,而时间也是随机的。
随机仿真通常用于建模和分析具有随机性质的系统,例如金融系统、天气系统和生物系统等。
随机仿真模型可以用于分析系统的风险、概率特性和对策选择等方面。
5. Agent-Based ModelingAgent-based modeling (ABM) is a simulation technique that focuses on simulating the actions and interactions of autonomous agents within a system. This approach is often used for modeling complex and decentralized systems, such as social networks, biologicalecosystems, and market economies. In ABM, individual agents are modeled with their own sets of rules, behaviors, and decision-making processes, and their interactions with other agents and the environment are simulated over time. ABM can be used to study the emergent behavior and dynamics of complex systems, and to explore the effects of different agent behaviors and interactions on system-level outcomes.三、常用技术1. Monte Carlo方法蒙特卡洛方法是一种基于随机模拟的数值计算技术。
计算机仿真法

计算机仿真法计算机仿真法是一种利用计算机进行模拟和模型推演的方法。
它通过建立数学模型和运用计算机算法,模拟复杂的自然和人工系统,以研究系统的行为和性能。
计算机仿真法在科学研究、工程设计、风险评估等领域具有广泛的应用。
一、计算机仿真法的基本原理计算机仿真法的基本原理是将系统的行为和性能用数学模型来描述,然后利用计算机算法进行模拟和模型推演。
数学模型是对系统的抽象和简化,通过模型可以描述系统的结构、参数和运行规律。
计算机算法是对模型进行数值计算和仿真的方法,通过计算机的计算能力,可以模拟并推演出系统的行为和性能。
二、计算机仿真法的应用领域1. 科学研究:计算机仿真法在物理学、化学、生物学等科学领域具有广泛的应用。
通过建立数学模型和进行计算机仿真,可以模拟和研究分子结构、物质性质、生物过程等复杂系统的行为和性能,为科学研究提供重要的工具和手段。
2. 工程设计:计算机仿真法在工程设计中发挥着重要的作用。
通过建立系统的数学模型和进行计算机仿真,可以模拟和评估不同设计方案的性能和可行性,优化设计方案,减少试验和开发成本,提高工程设计的效率和质量。
3. 风险评估:计算机仿真法在风险评估中起到了重要的作用。
通过建立风险系统的数学模型和进行计算机仿真,可以模拟和评估不同风险因素对系统的影响,预测系统的风险水平,并制定相应的风险控制策略,提高风险管理的能力和水平。
三、计算机仿真法的优势和不足1. 优势:- 灵活性:计算机仿真法可以对系统的各种变量和参数进行灵活的调整和控制,方便研究人员进行不同条件下的模拟和推演。
- 精确性:计算机算法可以进行高精度的数值计算,能够准确模拟和推演系统的行为和性能。
- 可视化:计算机仿真法可以将仿真结果以图形、动画等形式展示出来,使研究人员更直观地理解系统的行为和性能。
2. 不足:- 假设和简化:计算机仿真法建立在数学模型的基础上,对系统进行了一定的假设和简化,可能会引入一定的误差和不确定性。
控制系统数字仿真 要点

词汇表1. 解析法:就是运用已经掌握的理论知识对控制系统进行理论上的分析、计算。
它是一种纯理论上的试验分析方法,在对系统的认识过程中具有普遍意义。
2. 实验法:对于已经建立的实际系统,利用各种仪器仪表及装置,对系统施加一定类型的信号,通过测取系统的响应来确定系统性能的方法。
3. 仿真分析法:就是在模型的基础上所进行的系统性能分析与研究的实验方法,它所遵循的基本原则是相似原理。
4. 模拟仿真:采用数学模型在计算机上进行的试验研究称之为模拟仿真。
5. 数字仿真:采用数学模型,在数字计算机上借助于数值计算的方法所进行的仿真试验称之为数字仿真。
6. 混合仿真:将模拟仿真和数字仿真结合起来的仿真方法。
7. 数值计算:有效使用数字计算机求数学问题近似解的方法与过程。
数值计算主要研究如何利用计算机更好的解决各种数学问题,包括连续系统离散化和离散形方程的求解,并考虑误差、收敛性和稳定性等问题。
8. 病态问题:闭环极点差异非常大的控制系统叫做病态系统,解决这类系统的问题就叫病态问题。
9. 显式算法:在多步法中,若计算第k+1次的值时,需要的各项数据均是已知的,那么这种算法就叫做显式算法。
10. 隐式算法:在多步法中,若计算第k+1次的值时,又需要用到第k+1次的值,即算式本身隐含着当前正要计算的量,那么这种算法就叫做隐式算法。
11. 数值稳定性:数值积分法求解微分方程,实质上是通过差分方程作为递推公式进行的。
在将微分方程离散为差分方程的过程中,有可能将原本稳定的系统变为不稳定系统。
如果某个数值计算方法的累积误差不随着计算时间无限增大,则这种数值方法是稳定的,反之是不稳定的。
12. 实体:就是存在于系统中的具有实际意义的物体。
13. 属性:就是实体所具有的任何有效特征。
14. 活动:系统内部发生的任何变化过程称之为内部活动;系统外部发生的对系统产生影响的任何变化过程称之为外部活动。
15. 描述模型:是一种抽象的、无实体的,不能或者很难用数学方法精确表示的,只能用语言描述的系统模型。
空气系统的实时仿真模型及算法
空气系统的实时仿真模型及算法摘要:流体网络实时仿真广泛应用与很多领域,现针对空气系统流动的特点,应用流体网络仿真模型,计算空气系统在发动机工作在过渡状态时的压力、流量分布,保证在边界条件变化的情况下空气系统也可以正常工作,实现冷却、封严等功能。
空气系统局部的变化会影响整个系统的流动,对于过渡状态的流动需要进行准确的模拟。
关键词:空气系统实时仿真不可压流体中图分类号:o351.3 文献标识码:a 文章编号:1007-9416(2012)11-0136-021、引言航空发动机空气系统是关系到发动机热端部件冷却的内流系统[1]。
空气系统通常是从压气机的适当位置抽取空气,通过发动机主通道的内侧和外侧的各种流动元件按设计的流路及要求的流动参数(压力,温度和流量)流动并完成规定的各项功能:供给并控制涡轮冷却叶片的冷却空气,保证叶片冷气进口具有要求的压力和温度;冷却涡轮转子、静子等热端部件,保持工作时允许的温度状态;控制压气机盘轴的温度状态;为轴承提供封严空气;阻隔高压热气入侵等。
因此空气系统在航空发动机设计中举足轻重。
航空发动机空气系统一直以稳态计算为主,一般留有很大域度。
随着航空发动机的发展,稳态计算已经不能满足需求,空气系统精确化设计成为一个不可避免的问题。
民用适航规章ccar33部中有多个条款涉及到对航空发动机空气系统的要求。
适航标准要求空气系统设计中必须考虑飞行包线内的工作特性,并且尽可能保证航空发动机在整个工作循环中能过正常工作。
这些要求都需要对空气系统的设计进行瞬态设计,准确掌握其在整个工作循环中的工作状态,避免局部失效和瞬间失效,同时也可以为结构、传热等设计提供详细的数据,便于其他部分的设计。
因此空气系统的实时仿真是亟待解决的问题。
2、空气系统瞬态计算方法就任意一个空气系统来说,均可抽象成由节流单元与腔室组成的流体网络。
假设空气系统内部的工质为一维流动,将其视为不同元件组成的网络系统,每一个元件只有一个进口和一个出口,并用节点表示元件的进口和出口,同时,节点也是元件与元件之间的连接点。
仿真算法知识点总结图解

仿真算法知识点总结图解一、仿真算法的基本原理1.1 仿真概念仿真是指通过模拟实际系统的运行过程来预测系统性能、评估方案、优化设计等的一种方法。
仿真可以用于模拟现实世界中的各种系统,如物理系统、信息系统、经济系统等。
1.2 仿真模型仿真模型是对实际系统的简化描述,它包括系统的结构、行为规则、参数等信息。
通过建立仿真模型,我们可以在计算机上进行模拟实验,以探索系统的性能、行为特征和优化方案。
1.3 仿真算法的分类根据系统类型和仿真目的的不同,仿真算法可以分为连续系统仿真算法和离散系统仿真算法。
连续系统仿真算法适用于连续变量的系统,如物理系统和控制系统;离散系统仿真算法适用于离散事件的系统,如排队系统和生产系统。
1.4 仿真算法的基本步骤仿真算法的基本步骤包括建模、验证、实验设计、模拟运行和结果分析等。
建模是仿真算法的核心,它涉及到系统结构的抽象化、参数的设定、规则的定义等。
验证是指通过比较仿真结果与实际观测数据的一致性来检验仿真模型的有效性。
实验设计是指设计合理的仿真实验以获取有用的信息。
模拟运行是指在计算机上运行仿真模型进行试验。
结果分析是指对仿真结果进行统计分析和评价。
1.5 仿真算法的评价指标仿真算法的评价指标包括仿真精度、仿真效率和仿真可信度等。
仿真精度是指仿真结果与实际观测数据的一致程度;仿真效率是指仿真模型的计算速度和资源消耗;仿真可信度是指仿真结果的合理性和可靠性。
二、连续系统仿真算法2.1 连续系统方程的数值解法连续系统方程通常是由微分方程或偏微分方程描述的,为了在计算机上进行仿真,需要采用数值解法对这些方程进行离散化处理。
常用的数值解法包括欧拉法、梯形法、四阶龙格-库塔法等。
2.2 连续系统仿真的模拟程序设计连续系统仿真的模拟程序通常包括系统方程的离散化模型、时间步长控制、数值解法的选择、边界条件处理等内容。
设计一个高效、稳定的连续系统仿真程序是非常具有挑战性的。
2.3 连续系统仿真的优化方法针对连续系统仿真的高维度、非线性等特点,通常需要采用一些优化方法来提高仿真效率和精度。
倒立摆系统的控制算法及仿真
倒立摆系统的控制算法及仿真1.1 倒立摆控制算法1.1.1 倒立摆控制算法概述单级倒立摆的稳定控制,实际上是一单输入多输出系统的稳定控制。
此时系统输入是电机控制电压u,输出是倒立摆竖直方向角度θ和旋臂位置ϕ。
对方程(2.5)进行变形即得θ与u 之间的输入输出方程,很明显,它是一个不稳定的二阶系统。
控制倒立摆使之稳定的方法很多,当前已有的倒立摆控制规律可总结为:(1)PID控制,通过对倒立摆物理模型的分析,建立倒立摆的动力学模型,然后使用状态空间理论推导出其非线性模型,再在平衡点处进行线性化得到倒立摆系统的状态方程和输出方程,于是就可设计出PID控制器实现其控制;(2)状态反馈H∞控制,通过对倒立摆物理模型的分析,建立倒立摆的动力学模型,然后使用状态空间理论推导出状态方程和输出方程,于是就可应用H∞状态反馈和Kalman 滤波相结合的方法,实现对倒立摆的控制;(3)利用云模型实现对倒立摆的控制,用云模型构成语言值,用语言值构成规则,形成一种定性的推理机制。
这种拟人控制不要求给出被控对象精确的数学模型,仅仅依据人的经验、感受和逻辑判断,将人用自然语言表达的控制经验,通过语言原子和云模型转换到语言控制规则器中,就能解决非线性问题和不确定性问题;(4)神经网络控制,业已证明神经网络(NeuralNetwork ,NN) 能够任意充分地逼近复杂的非线性关系,NN 能够学习与适应严重不确定性系统的动态特性,所有定量或定性的信息都等势分布贮存于网络内的各种神经元,故有很强的鲁棒性和容错性,也可将Q学习算法和BP神经网络有效结合,实现状态未离散化的倒立摆的无模型学习控制;(5)遗传算法( Genetic Algorithms , GA),高晓智在Michine 的倒立摆控制Boxes 方案的基础上,利用GA 对每个BOX 中的控制作用进行了寻优,结果表明GA可以有效地解决倒立摆的平衡问题;(6)自适应控制,主要是为倒立摆设计出自适应控制器;(7)模糊控制,主要是确定模糊规则,设计出模糊控制器实现对倒立摆的控制;(8)使用几种智能控制算法相结合实现倒立摆的控制,比如模糊自适应控制,分散鲁棒自适应控制等等,(9)采用GA 与NN 相结合的算法,首先建立倒立摆系统的数学模型,然后为其设计出神经网络控制器,再利用改进的贵传算法训练神经网络的权值,从而实现对倒立摆的控制,采用GA 学习的NN 控制器兼有NN 的广泛映射能力和GA 快速收敛以及增强式学习等性能。
仿真算法的实现过程

仿真算法的实现过程仿真算法是一种通过计算机编程模拟现实场景或系统的数学方法。
它通常用于研究复杂系统的行为,找出变量之间的相互作用,并对系统进行预测。
在本文中,我们将介绍仿真算法的实现过程,并以离散事件仿真为例进行说明。
1.确定仿真的目的和问题:在实现仿真算法之前,首先需要明确仿真的目的和问题是什么。
确定仿真的目标可以帮助我们设计合适的模型和算法,以便有效地解决问题。
2.设计模型:在进行仿真之前,需要建立一个合适的数学模型来描述系统的行为。
模型可以是连续的,也可以是离散的,取决于系统的特征。
通常情况下,我们会使用数学方程或概率分布来描述系统的状态转移和事件发生的规律。
3. 编写仿真代码:一旦模型确定,就可以开始编写仿真代码了。
通常情况下,仿真代码是通过编程语言来实现的,比如Python、C++等。
编程语言需要支持实现数学模型,包括随机数生成、数据结构等功能。
4.初始化仿真环境:在进行仿真之前,需要初始化仿真环境,包括系统的初始状态、观测变量的初始值等。
这样可以确保仿真结果的可靠性。
5.运行仿真:一旦初始化完成,就可以开始运行仿真算法了。
在仿真的过程中,会根据事先设定的规则,模拟系统的行为,并记录关键变量的变化。
6.收集数据和分析结果:在仿真结束后,需要收集仿真过程中的数据,并对结果进行分析。
通过分析结果,可以得出对系统行为的认识,找出系统中存在的问题,并提出改进方案。
7.优化算法:如果发现仿真结果与实际情况不符,需要对算法进行优化。
可以尝试调整模型参数、增加数据采样点等方式来改进算法,提高仿真的准确性。
以离散事件仿真为例,其实现过程如下:1.确定仿真目的和问题:假设我们要仿真一个银行的排队系统,研究客户等待时间的分布情况。
2.设计模型:我们可以用离散事件仿真模拟银行的排队系统。
模型包括客户到达时间、服务时间、客户等待时间等变量。
我们可以用排队论的知识来建立数学模型。
3. 编写仿真代码:我们可以使用Python编程语言来编写仿真代码。
仿真系统中的参数优化算法使用教程与注意事项
仿真系统中的参数优化算法使用教程与注意事项随着科技的不断进步与发展,仿真技术在各个领域的应用越来越广泛。
仿真系统是其中的重要组成部分,它能够对现实世界进行模拟与分析,帮助人们更好地理解和预测各种现象。
其中,参数优化算法的使用对于提高仿真系统的准确性和效率具有重要作用。
本文将为大家介绍仿真系统中的参数优化算法的使用教程与注意事项。
一、参数优化算法的基本概念参数优化算法是一种通过不断调整参数来寻找最优解的方法。
在仿真系统中,我们通常需要将各种变量和参数设置到最佳状态,以达到最佳的仿真效果。
参数优化算法可以帮助我们快速地找到最佳参数组合,从而提高模型的准确性和效率。
常见的参数优化算法有:遗传算法、粒子群优化算法、模拟退火算法等。
这些算法在具体应用时,会根据实际情况选择合适的优化策略和参数调整方法。
二、仿真系统中参数优化算法的使用教程1. 确定需要优化的参数在使用参数优化算法前,我们首先需要确定需要优化的参数。
一般来说,仿真系统中有许多参数可以进行优化,比如模型中的各种变量、算法中的参数等。
我们可以根据实际需求和仿真目标,选择合适的参数进行优化。
2. 设定参数的取值范围在使用参数优化算法前,我们需要设定参数的取值范围。
这个范围应该包括参数的最小值和最大值,以及参数的步长。
参数的取值范围应该根据实际情况和经验进行选择,以保证参数在有效范围内进行优化。
3. 选择合适的优化算法在选择优化算法时,我们需要根据实际情况选择合适的算法。
不同的算法有不同的优缺点,适用于不同的问题。
遗传算法适用于多参数、多变量的优化问题;粒子群优化算法适用于连续参数的优化问题;模拟退火算法适用于带有随机性的优化问题等。
根据实际情况选择合适的算法可以提高优化的效果。
4. 设定优化目标和停止条件在进行参数优化时,我们需要设定优化的目标和停止条件。
优化目标一般是我们期望得到的最佳结果,可以是最小化误差、最大化效益等。
停止条件可以是迭代次数达到一定值、误差小于某个阈值等。
基于网络系统仿真的拥塞控制算法设计与分析
基于网络系统仿真的拥塞控制算法设计与分析拥塞控制是网络通信中的关键问题之一,它是保证网络性能和稳定性的重要手段。
本文将基于网络系统仿真,设计和分析几种常见的拥塞控制算法,包括AIMD 算法、RED算法和TCP Vegas算法。
一、AIMD算法AIMD(Additive Increase Multiplicative Decrease)算法是一种经典的拥塞控制算法,其核心思想是当网络拥塞时,减小发送速率,而当网络畅通时,增加发送速率。
我们首先在网络系统仿真中搭建了一个拥塞环境,模拟了网络传输的过程。
然后,我们利用AIMD算法对这个网络进行拥塞控制。
具体来说,当发现网络拥塞时,我们将逐渐减小发送速率,直到网络恢复正常。
而当网络畅通时,则逐渐增加发送速率。
通过仿真结果可以看出,AIMD算法能够很好地保证网络性能和稳定性。
二、RED算法RED(Random Early Detection)算法是一种被广泛应用的拥塞控制算法,它通过主动丢包来减轻网络拥塞。
在网络系统仿真中,我们使用RED算法来控制拥塞。
RED算法的原则是在网络拥塞开始之前就随机丢弃一部分数据包,以尽早探测到网络拥塞的信号。
通过调整RED算法的参数,我们可以使得网络具有更好的性能。
通过仿真实验,我们发现RED算法能够有效地减轻网络拥塞,提高网络吞吐量。
三、TCP Vegas算法TCP Vegas算法是一种基于时延控制的拥塞控制算法,其核心思想是通过测量网络时延来进行拥塞控制。
在网络系统仿真中,我们使用TCP Vegas算法来进行拥塞控制。
该算法通过测量数据包往返时延来进行速率调整。
当网络出现拥塞时,TCP Vegas会减小发送速率以减轻拥塞,而当网络畅通时,则逐渐增加发送速率。
通过仿真实验,我们发现TCP Vegas算法能够更加准确地调整发送速率,从而达到更好的网络性能。
四、算法比较与分析在仿真实验中,我们对AIMD算法、RED算法和TCP Vegas算法进行了比较与分析。
仿真系统中被动式时间同步算法的实现
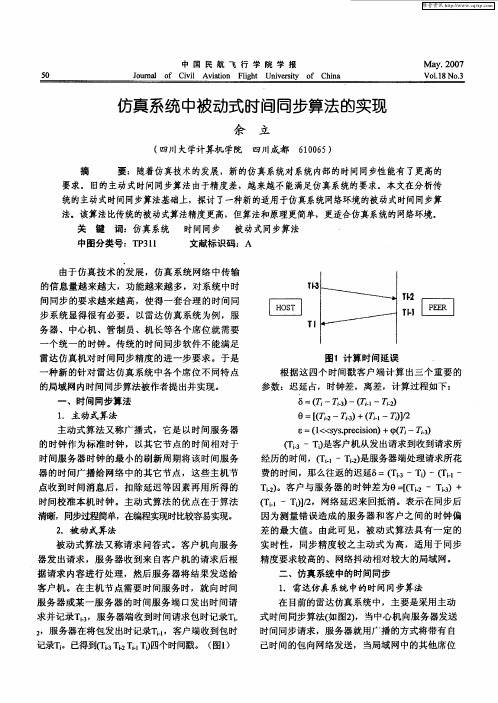
图2 旧的同步算法 接收到这个包时,就根据其 中的时间对 自己的时
钟进 行 调整 。
服务器之间的时间差
的时 间 b T 一 。 = a
3T ,进而计 算出客户 一2
2 .新的时间同步算法 采用 主动式 的时间同步算法不能满足 日益 增
加 的 雷达 仿 真 系 统对 时 间同 步性 能 的要 求 。 以被
经历 的 时间 ,(i —T.是服 务器端 处理 请求所 花 T_ l i) 2 费 的时 间,那么 往返 的迟延 6 T3一T =( O一(i 一 T. 1 T.。客 户 与服 务 器 的时 钟 差 为e=(I T- . 2 ) 【 . T2一 i)+ 3 (i T)2 网络延 迟来 回抵 消 。表 示 在 同步 后 T. J— i/, ] 因 为测 量 错 误造 成 的服 务器 和 客 户 之 间 的时 钟 偏
的局域 网 内时间 同步算法 被作 者提 出并 实现 。
一
、
时间同步算法
1 .主动式算法 主动式算法又称广播式,它是 以时间服务器
的 时钟 作 为标 准 时钟 ,以其 它节 点的 时 间相对 于 时 间服 务器 时钟 的最 小 的刷 新周 期将 该 时间服 务
( 一T 是客户机从发出请求到收到请求所 T i )
雷达仿真机对时间同步精度 的进一步要求 。于是
一
根据这四个时间戳客户端计算 出三个重要的 参数:迟延 占,时钟差 ,离差,计算过程如下:
6 一7 一( 1 j) =( ) .一T 2 . 0=【 一 ) l ( +( 一功 】 / 2 £ 1 <y.rcs n +( 一 3 =(< ss ei o ) P ) p i (
T 。 2 和 是从服务器和 F 0接收到请求对 、T D 时开始计时,因此避免了网络造成 的传输延时,
遗传算法在系统仿真中的效果评估

遗传算法在系统仿真中的效果评估随着科技的不断发展,系统仿真在各个领域中扮演着越来越重要的角色。
而在系统仿真过程中,如何评估仿真结果的准确性和可靠性成为了一个关键问题。
遗传算法作为一种优化算法,在系统仿真中的效果评估中发挥着重要作用。
一、遗传算法的基本原理遗传算法是一种模拟自然进化过程的优化算法。
它基于达尔文的进化论,通过模拟自然界中的“适者生存”和“优胜劣汰”的原则,通过不断的迭代和选择,逐步优化问题的解决方案。
遗传算法的基本原理包括:初始化种群、适应度评估、选择、交叉、变异和终止条件。
首先,通过随机生成一组初始解作为种群的初始状态。
然后,通过对每个个体的适应度进行评估,确定每个个体的适应度值。
接下来,根据适应度值选择优秀的个体作为下一代的父代,通过交叉和变异操作产生新的个体。
最后,通过不断迭代,直到达到终止条件为止。
二、遗传算法在系统仿真中的应用遗传算法在系统仿真中的应用非常广泛。
它可以用于参数优化、系统设计、决策支持等方面。
下面以参数优化为例,介绍遗传算法在系统仿真中的应用。
在系统仿真中,参数优化是一个非常重要的任务。
通过调整系统中的参数,可以使系统的性能达到最优。
而遗传算法作为一种全局搜索算法,可以在较短的时间内找到问题的最优解。
首先,我们需要确定系统中需要优化的参数。
然后,将这些参数编码成染色体,每个染色体代表一个解。
接着,通过遗传算法的选择、交叉和变异操作,生成新的解。
根据系统仿真的评估指标,对新的解进行适应度评估。
通过不断迭代,直到达到终止条件为止,得到问题的最优解。
三、在系统仿真中,评估仿真结果的准确性和可靠性是非常重要的。
而遗传算法可以通过对仿真结果的多次迭代和优化,提高仿真结果的准确性和可靠性。
首先,通过对系统中的参数进行优化,可以使仿真结果更加接近实际情况。
遗传算法通过不断迭代和选择,找到问题的最优解,从而使系统的仿真结果更加准确。
其次,遗传算法可以通过对仿真结果的多次迭代,评估系统的稳定性和可靠性。
基于事件的系统可靠性参数仿真算法

1 扩展可 靠性框 图及其结构表 示 11 研究 . 层次
2 扩 展 可 靠性 框 图 的系统 行 为 分 析
图 1 扩展 可 靠 性 框 图 示例
基本 可靠 性框 图 由矩 形 、 线段组 成 , 以表 示 串 可
计算机仿真的过程与方法

计算机仿真的过程与方法计算机仿真是使用计算机模拟实际系统或过程的过程。
它通过在电子计算机中建立数学模型,以及使用适当的算法和技术来模拟实际系统的行为和特性。
计算机仿真在各个领域都有广泛的应用,包括工业制造、物流管理、交通运输、金融行业、医学等等。
本文将介绍计算机仿真的过程和一些常用的方法。
1.定义目标:确定仿真的目标和研究的问题。
例如,模拟一个机器人在不同环境下的运动,可以设定目标为优化机器人的路径规划算法。
2.建立模型:根据仿真的目标和问题,建立数学模型。
模型可以是连续或离散的,可以基于物理方程、统计数据或规则等不同的方法。
例如,机器人运动的模型可以基于运动学和动力学方程。
3.选择仿真工具:根据模型的特点和需求,选择合适的仿真工具和软件平台。
常用的仿真软件包括MATLAB、Simulink、Arena等。
这些软件提供了丰富的仿真功能和工具。
4.参数设定:确定模型的参数值。
这些参数可以是系统的物理参数,也可以是算法中的参数。
例如,机器人模型中的参数包括质量、惯性矩阵、摩擦系数等。
5.设计实验:根据仿真目标和问题,设计合适的实验方案。
实验应涵盖不同的情况、条件和参数值,以获得全面的仿真结果。
例如,在机器人路径规划的实验中,可以设计不同形状的环境和不同起点终点的情况。
6.运行仿真:运行仿真实验,根据设计的实验方案,对模型进行仿真计算。
仿真可以是离线或实时的,可以针对不同的时间段和步长进行计算。
在运行过程中,记录和分析仿真结果。
7.结果分析:根据仿真结果,对模型的行为和性能进行分析。
可以对仿真结果进行统计、可视化和对比等处理。
分析结果可以用来验证模型的准确性和有效性,并得出结论。
常用的计算机仿真方法包括离散事件仿真、连续系统仿真和Monte Carlo仿真等。
离散事件仿真(DES)是一种基于事件驱动的仿真方法,模拟系统中的离散事件和它们之间的相互作用。
系统的状态在不同的事件发生时发生变化,仿真通过模拟事件的发生和处理来模拟整个系统的行为。
仿真系统技术方案
仿真系统技术方案引言仿真系统是一种通过计算机模拟和重现真实场景的技术,可以用于验证设计方案的可行性、优化系统性能以及培训人员技能。
随着计算机技术的不断发展和性能的提升,仿真系统在各个领域都得到了广泛应用。
本文将从技术方案的角度,介绍仿真系统的实现过程、技术要点以及相关应用。
技术方案概述在实现一个仿真系统时,需要考虑以下几个方面的技术要点:1.建模和数据采集:仿真系统的功能依赖于准确的建模和数据采集。
建模可以使用3D建模软件,如Blender和3ds Max来创建虚拟场景。
数据采集可以通过传感器和设备来获取真实场景中的参数,如温度、湿度、速度等。
2.物理引擎:仿真系统需要模拟真实世界中的物理效应,如重力、碰撞等。
物理引擎是实现这些效应的核心组件,常见的物理引擎有Unity的PhysX和Havok等。
3.用户交互:仿真系统需要提供友好的用户界面,让用户能够对模拟场景进行操作和控制。
用户交互可以通过鼠标、键盘、手柄等输入设备来实现,同时还可以支持虚拟现实和增强现实等交互方式。
4.仿真算法:仿真系统需要使用各种算法来模拟真实世界中的行为和效应。
例如,仿真系统可以使用机器学习算法来学习和优化系统性能,也可以使用物理模型和数值计算方法来模拟物体的运动和变形。
5.性能优化:仿真系统通常需要处理大量的数据和复杂的计算,因此性能优化是非常重要的。
可以使用并行计算和多线程技术来加速仿真过程,同时还可以进行内存管理和算法优化来提高系统的响应速度和稳定性。
技术方案实现步骤下面是一个基本的仿真系统实现步骤的示例:1.确定仿真系统的需求和目标:在开始实现之前,需要明确仿真系统的需求和目标。
根据具体应用场景和用户需求,确定需要模拟的物理效应、场景设置以及用户交互方式等。
2.进行场景建模和数据采集:使用3D建模软件创建虚拟场景,并导入真实场景中的参数和数据。
可以通过传感器和设备来采集真实场景中的数据,比如温度、湿度等。
3.选择物理引擎和仿真算法:根据仿真系统的需求,选择适合的物理引擎和仿真算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所谓数值解法,就是寻求初值问题式(3-1)的真解在 一系列离散点 t1 t2 L tn L 上的近似数值解 Y1,Y2,...,Yn,... 相邻两个时间离散点的间隔hn = tn+1 - tn, 称为计算步距或步长,通常取hn = h为定值。
数值积分法的主要问题归结为对函数F(t,Y)的数值积分问题
数值解法 3.1 数值积分法(针对连续系统的微分方程形式。利用数值
积分方法对常微分方程(组)建立离散化形式的数学模型 ——差分方程,并求其数值解 )
3.1 数值积分法
3.1.1 数值积分法基本原理
把被仿真系统表示成一阶微分方程组或状态方程的形式
Y& F (t,Y ) Y (t0 ) Y0
(3-1)
h[
f
(tn ,
yn )
f
(tn1,
yn 1 )]
3.1 数值积分法
即
yn1
yn
1 h[ f 2
(tn , yn )
f
(tn1, yn1)]
yn
1 2
h[
f
n
f n 1 ]
也称为梯形公式或二阶隐式Adams公式,公式右端隐含有待
求量,故梯形法不能自行起步运算,而需有其他算法的帮
助。为了提高计算精度常常需要迭代运算。为减小计算量
系统仿真算法
第3章系统仿真算法 3.1 数值积分法
在数学仿真中,从一个实际系统抽象出数学模型只是第一步,这 一步将实际系统变成了数学模型,可以称之为系统建模或系统辨识, 这是第一次模型化过程。这次模型化所得到的只是数学方程式,必须 使用一定的仿真工具才能求解。将已获得的数学模型变成能在一定仿 真工具中运算求解的仿真模型,这是第二次模型化过程。
梯形面积代替每一个小区间的曲线面积,则可提高精度。
曲边梯形的面积为 直边梯形的面积为
tn1
S1 f (t, y)dt y(tn1) y(tn )
n ,
yn )
f
(tn1,
yn 1 )]
当比较小时,以直边梯形面积取代曲边梯形的面积,可得
y(tn1)
y(tn )
1 2
只要给定初始条件y0及步长h,就可根据f(t0,y0)算出y1, 再由y1,算出y2,如此递推算出y3,y4,y5…。
【例3-1】 y& y2 0 y(0) 1 h 0.1 0≤t ≤1 试用Euler法求其数值解。
3.1 数值积分法
2. 改进Euler法(预估 — 校正法) 在Euler法中,是用矩形面积来代替曲边梯形面积。如果改用
依次取1/2,1/2,0,1时为 依次取1,1,1/2,1/2时为
k1 f (tn , yn )
k2
f (tn
h 2 , yn
1 2 hk1)
yn1
yn
hf
(tn
h 2
,
yn
1 2
hk1 )
yn1
k1
f
yn
h 2
(tn,yn
(k1 )
k2
)
k2 f (tn h,yn hk1)
3.1 数值积分法
k4 )
y1
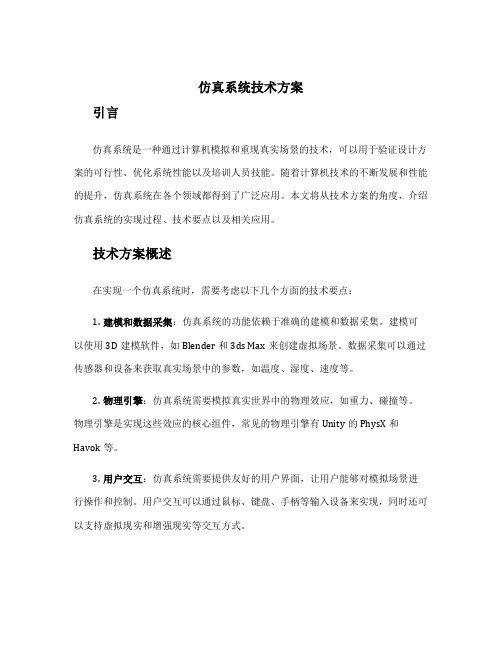
打印 x1, y1
N i n?
Y
i 1 i x1 t0 y1 y0
3.1 数值积分法
【例3-2】已知系统方程 &y& 0.5y& 2 y 0 y&(0) 0 y(0) 1 取步长 h 0.1试用RK4公式计算 t 0.1 t 0.2 时y的值。 解:将原系统方程转化成下列方程组:
三阶RK法公式: 四阶RK法公式:
yn1
yn
h 4
(k1
3k3 )
k1
f
(tn,yn )
k2
f (tn
h3,yn
h 3
k1
)
k3
f
(tn
2h 3
,yn
2h 3
k2
)
yn1
yn
h 6
(k1
2k2
2k3
k4 )
k1
f (tn,yn )
k2
f (tn
h 2
,yn
h 2
k1
)
k3 k4
f (tn f (tn
则上式在 t t0,t1,...,tn,tn1 在形式上的连续解为
tn1
tn1
Yn1 Y (tn1) Y (t0 ) F (t,Y )dt Y (tn ) F (t,Y )dt Yn Qn
t0
tn
通过上式的演化,连续系统的数值解就转化为相邻
两个时间点上的数值积分问题。
3.1 数值积分法
将这种思想引申如果在每个积分步中多取几个点(如取r个点 ),分别求出其斜率 k1,k2,…,kr,然后取不同的权 值,则公式为:k 1k1 2k2 ... rkr 得出一系列龙格 —
库塔(Runge-Kutta)法 。
3. 几个基本概念 (1)算法自启动 (2)单步法与多步法 (3)显式与隐式 (4)截断误差 (5)舍入误差 (6)初始误差
h 2
,yn
h 2
k2
)
h,yn hk3)
3.1 数值积分法
四阶RK法程序框图
开始 读入数据
0i
t0 h x1 f (t0 , y0 ) k1
f
(t0
h 2
,
y0
hk1 ) 2
k2
f
(t0
h 2
,
y0
hk2 2
)
k3
f (t0 h, y0 hk3 ) k4
y0
1 6
h(k1
2k2
2k3
1. Euler法 对于初值问题
y& f (t, y)
y(0)
y0
假定y(t)为其解析解,将展成泰勒级数:y(t h) y(t) y&(t)h ...
则 y(t h) y(t) hf (t, y)
写成差分方程的形式:
3.1 数值积分法
yn1 yn hf (tn , yn ) yn hfn
3.1 数值积分法
3.1.2 龙格-库塔(Runge-Kutta)积分法 是用几个点上的的一阶导函数值的线性组合来近似代替在某
一点的各阶导数,然后用Taylor级数展开式确定线性组合 中各加权系数。这就是Runge-Kutta(简称RK)法的基本 思想。 各阶RK公式及说明如下:
一阶RK公式为: y(t h) y(t) hf (t,y) 它就是Euler公式,也就是说,Euler公式是RK公式的特例
,常常迭代一次就求得近似解。这样就可以得到改进的
Euler法公式:
yp n1
yn
hf
(tn ,
yn )
yc n1
yn
1 2
h[
f
(tn ,
yn )
f
(tn1,
yp n1
)]
第一式称为预估公式,第二式称为校正公式。通常称这类方 法为预估— 校正法。
实质上是采用了和两点斜率平均值的结果
3.1 数值积分法
二阶RK法是每步取两个斜率加权。 第一斜率 k1 f (tn , yn ) fn
第二斜率 k2 f (tn h, yn hk1)
加权后递推公式为 yn1 yn hk yn h(1k1 2k2 )
3.1 数值积分法
经过与泰勒级数对比可确定四个参数αβω1ω2,可得二阶RK法 的计算公式: