hypermesh第一讲-建立焊点
hypermesh基础教程(入门、经典)
第一章 HyperMesh入门首先我们要了解什么是mesh,简单的说mesh就是网格的划分。
有过有限元分析背景的人都知道,做有限元分析首先第一步工作就是建模,就是把分析对象按照一定的尺寸、比例划分成相互连接、不间断的网格单元,成为一个可以计算的力学模型,这是进行有限元计算的基础。
其划分的结果对于以后计算的结果将产成直接的影响,或者说mesh是保证有限元分析结果准确的重要条件。
下面我就最简单的分析对象——金属壳体,向大家讲述怎样进行一个物体的mesh。
我们所用软件是HyperMesh,它对于有限元的前处理和后处理都具有比较强大功能。
第一节软件环境首先,我们要了解工作的目标,即最终要把一个金属壳体处理成怎样的网格。
打开练习一,这个文件中已经包含geom和放到中面的elems。
我们现在要搞清的第一概念就是geom和elems的区别。
Geom即为几何体,是我们分析对象的真实模型,实际物体的三维表现形式;elems即为网格单元,是我们分析对象的力学模型,是对实际物体的一种近似模拟,是把实际物体转换成可计算的力学和数学模型,它不是简单的线和面,是带有数据的线和面。
在HyperMesh中,我们把geom和elems统称为comps,comps可以理解为图层,这里的图层和CAD的图层的概念不同。
这里comps是以后赋予模型材料和几何性质的一个最小单元,或者说对于不同材料性质和不同几何性质的elems要处于不同的comps中。
每个comps都会有个名字,所以同一个名字的comps包含两个部分,即XXX(名字)geom 和XXX(名字)elems。
当然几何体和力学模型是两个完全独立的部分,所以两者完全可以放在不同的comps中的,对于图层名字的管理我们在下一章再做详细说明。
对于一个金属壳体,我们知道金属板是具有均有厚度的,即在三维上它总是有个方向上是保持不变的,这样我们就可以用比较简单的二维单元来描述金属壳体,这个二维单元我们称壳体单元。
hyperworks_hypermesh_HYPERMESH讲义 PPT
6、施加边界条件: 改变当前工况组件为约束组件(force)
Analysis-FORCES 选择需要加力的点,magnitude为力大小,Z-AXIS为方向
6、建立工况 ANALYSIS-SUBCASE
TYPE为求解的方式,本例为线性求解,SPC和LOAD分别 为刚才建立的约束和边界条件
第五:最小三角形内角:大于15度;最大三角形内角:小于
140度;
第六:最大翘曲度:小于12度。
第七:三角形占全部单元比例:整个模型最好小于10%,最
多不超过15%。
网格质量检查(F10)
2D-QUALITY
1、建立网格材料组件
点击CREAT EDIT,进行材料编辑 其中E为弹性模量,NU为泊松比,RHO为密度
2、建立网格单元组件
3、划分网格 改变当前组件为STEEL
利用上节中的槽型钢网格:
4、建立约束组件
4、建立边界条件组件
5、施加约束: 改变当前工况组件为约束组件(SPC)
Analysis-constrains
选中所需要约束的点,右边的DOF从1到6分别为XYZ的 平动和转动。
点击图标可以改变网格划分形式和算法
4、检查网格自由边(TOOL-EDGES,F3)
5、网格质量检查
第一:单元长度:通常按照10mm划分,但最小单元长度不
要
小于5mm;
第二:单元长宽比:小于1:5;
第三:雅各比:大于0.5;
第四:最小四边形内角:大于40度;最大四边形内角:小于
135度;
点击
改变边显示模式
点击
能改变显示的方式
2、删除重复面3、8和多余的POINT(F2)
3、合并几何点 (GEOM-EDIT POINTS-REPLACE) 将曲面1和曲面9右边的点进行合并
HyperMesh入门教程
HyperMesh入门教程HyperMesh的界面介绍HyperMesh的几何建模和清理HyperMesh的网格剖分和优化HyperMesh的连接建立和检查HyperMesh的材料和属性定义HyperMesh的载荷和约束设置HyperMesh的模型导出和导入HyperMesh的界面介绍菜单栏:位于界面顶部,包含了各种功能菜单,如File、View、G eometry、Mesh等。
工具栏:位于菜单栏下方,包含了常用的工具按钮,如Select、M ove、Rotate等。
面板区:位于界面左侧,包含了各种功能面板,如Model Browser、Entity Editor、Connectors等。
图形区:位于界面中央,用于显示和操作模型。
状态栏:位于界面底部,用于显示当前的操作模式、坐标系、鼠标位置等信息。
HyperMesh的几何建模和清理HyperMesh可以通过两种方式创建几何模型:从零开始创建:使用Geometry菜单中的各种工具,如Point、Line、Surface等,可以创建基本的几何实体,并通过Boolean运算等方式进行组合和修改。
无论是哪种方式创建的几何模型,都需要进行一定的清理工作,以保证模型的质量和完整性。
HyperMesh提供了一系列的几何清理工具,如Geometry菜单中的Check、Edit、Cleanup等选项。
常见的几何清理操作包括:检查并修复几何实体之间的重叠、交叉、间隙等问题。
检查并修复几何实体内部的自相交、重复点线面等问题。
检查并修复几何实体之间的拓扑关系,如共享点线面等。
检查并修复几何实体的法向方向,确保法向一致性。
检查并修复几何实体的尺寸和形状,避免过大或者过小、过扁或者过尖等问题。
HyperMesh的网格剖分和优化网格剖分是将连续的几何实体离散为有限个节点和单元,以便进行有限元分析。
HyperMesh支持多种类型的网格剖分方法,如:2D网格剖分:将平面或者曲面实体剖分为三角形或者四边形单元。
hypermesh简易实用教程.

F 合适窗口大小 D display窗口H help文件F2 delete panelF12 auto mesh panel F10 elem check panel F5 mask panel F6 element edit panel Ctrl+鼠标左键旋转Ctrl+鼠标滑轮滑动缩放Ctrl+鼠标滑轮画线缩放画线部分Ctrl+鼠标右键平移F11 quick edit panel Ctrl+F2 取图片保存到F9 line edit panel R rotation 窗口F4 distance panel 可以寻找圆心W windows窗口G Global panel O Option panelShfit+F1……新窗口Shfit+F11 operation窗口Shfit+ctrl 可以透视观察Shfit+F12 smooth 对网格平顺化Shifit+F3 检查自由边,合并结点鼠标中键确认按纽Shot cut一 hypermesh网格划分⑴单元体的划分1.1 梁单元该怎么划分?Replace可以进行单元结点合并,对于一些无法抽取中面的几何体,可以采用surface offset 得到近似的中面线条抽中线:Geom中的lines下选择offset,依次点lines点要选线段,依次选中两条线,然后Creat.建立梁单元:1进入hypermesh-1D-HyperBeam,选择standard seaction。
在standard section library 下选HYPER BEAM在standard section type下选择solid circle(或者选择其它你需要的梁截面。
然后create。
在弹出的界面上,选择你要修改的参数,然后关掉并保存。
然后return.2 新建property,然后create(或者选择要更新的prop),名称为beam,在card image 中选择PBAR,然后选择material,然后create.再return.3 将你需要划分的component设为Make Current,在1D-line mesh,选择要mesh的lines,选择element size,选择为segment is whole line,在element config:中选择bar2,property选择beam(上步所建的property.然后选择mesh。
2024年hypermesh基础培训教程
Hypermesh基础培训教程一、引言Hypermesh是一款功能强大的有限元前处理器,广泛应用于结构分析、热分析、流体分析等领域。
本教程旨在帮助初学者快速掌握Hypermesh的基础操作,为后续的高级应用打下坚实基础。
通过本教程的学习,读者将能够熟练地进行几何建模、网格划分、材料属性定义、边界条件施加等基本操作。
二、Hypermesh界面及基本操作1.启动Hypermesh在安装完Hypermesh软件后,双击桌面图标启动程序。
初次启动时,系统会提示设置工作目录,选择一个便于管理的路径即可。
2.界面介绍Hypermesh界面主要包括菜单栏、工具栏、主窗口、状态栏等部分。
菜单栏包含文件、编辑、视图、网格、工具等菜单,通过菜单可以执行各种操作。
工具栏提供了常用的快捷操作按钮,方便用户快速执行命令。
主窗口用于显示几何模型、网格、分析结果等。
状态栏位于界面底部,显示当前操作的状态信息。
3.基本操作(1)打开模型:通过菜单栏“文件”→“打开”命令,选择相应的几何文件(如iges、stp等格式),打开模型。
(2)缩放、旋转、平移视图:通过工具栏的相应按钮,可以调整视图的显示。
同时,鼠标滚轮可以控制视图的缩放。
(3)选择元素:鼠标左键单击选择单个元素,按住Ctrl键同时单击可以选择多个元素。
(4)创建集合:通过菜单栏“编辑”→“创建集合”命令,可以将选中的元素创建为一个集合,便于后续操作。
(5)撤销与重做:通过菜单栏“编辑”→“撤销”或“重做”命令,可以撤销或重做上一步操作。
三、几何建模1.几何清理在实际工程中,导入的几何模型往往存在冗余面、重叠边等问题,需要进行几何清理。
Hypermesh提供了丰富的几何清理工具,如合并顶点、删除线、删除面等。
2.创建几何元素Hypermesh支持创建点、线、面、体等几何元素。
通过菜单栏“几何”→“创建”命令,选择相应的几何元素创建工具,如创建点、创建线、创建面等。
3.几何编辑Hypermesh提供了丰富的几何编辑功能,如移动、旋转、缩放、镜像、复制等。
hypermesh车身焊点的处理

sigud44
游客
这个精度看个人懂得了,仅在刚度分析阶段,焊点的多少和焊接地位的选择以及是否存在重复焊点都对盘算成果有很大影响。至于crash和durability,参加了失效准则,焊点对成果的影响信任你比我明确
adjyyutcxa34g46
游客
我是分析焊点疲劳的,创造只有用bar单元才可以分析焊点应力进而进行疲劳分析,如果用cweld的话,在fatigue里面,就是建不了单元集,好象不把CWELD做为单元处理,.当然用REB2刚性单元就更不可以了.
Processed in 0.064318 second(s), 9 queries.
zunwang719
游客
利用hypermesh的Connector进行主动焊接,它可以建立不同求解器的焊点的类型,如nastran的CWELD,Dyna下的MAT100,以及abaqus下的BEAM,其中dyna和Abaqus是通过接触进行焊点的定义,一般情况下通过Connector生成的焊点,其焊点的材料以及接触都会定义好的。
titigg9
游客
都是一样的,基础上都像楼主那样有这么大的工作量而且焊点也基础上都用RBE2
jaciekunb
游客
RBE2是刚性元,不好,当然也看你分析的什么问题。在刚度和nvh分析中即应用nastran也可以用cweld单元和acm2单元,盘算成果都比rbe2单元要好。在dyna中单元类型最好选择beam,单元类型bt梁单元,材料模型100,可以加失效。abaqus我不太熟,但是可以依次类推。焊点工作量大,没有好的解决方法,我们一个项目一个项目就这么干下来的,除非和生产单位的设计和生产部门严格配合,有标准的几何数据,否则焊点数据不可能简略处理,没有任何简略方法。提请注意,焊点涌现必定的误差对盘算很有影响,这是我们的多年经验。
hypermesh第一讲-建立焊点
Hypermesh 中cweld、acm、fastener焊点建立1.车身焊点作用及技术要求1.1焊点作用焊接是汽车冲压件、铸造件、锻造件一种重要的链接方式,如点焊,缝焊。
其中点焊在车身钣金件和部分底盘件链接中广为应用。
它是将被焊工件压紧于两电极之间,并通以电流,利用电流流经工件有限接触面及邻近区域产生的电阻热将其加热到熔化而形成扁球形的熔核,达到金属结合的一种方法。
它在整车动态或静态工况中承受着各个方向的拉应力、压应力、剪应力,因此对整车的安全可靠性有着重要的影响。
1.2焊点技术要求焊点一般要求如下:1)焊点有足够的机械强度2)焊接可靠,保证导电性能。
3)焊点表面整齐、美观,如外观应光滑、清洁、均匀、对称、整齐、充满整个焊盘并与焊盘大小比例合适。
除上述要求,车身焊点还有直径、点距、抗剪强度等要求。
点距是指相邻两焊点的中心距,与被焊金属的厚度、导电率、熔核大小及焊接层数。
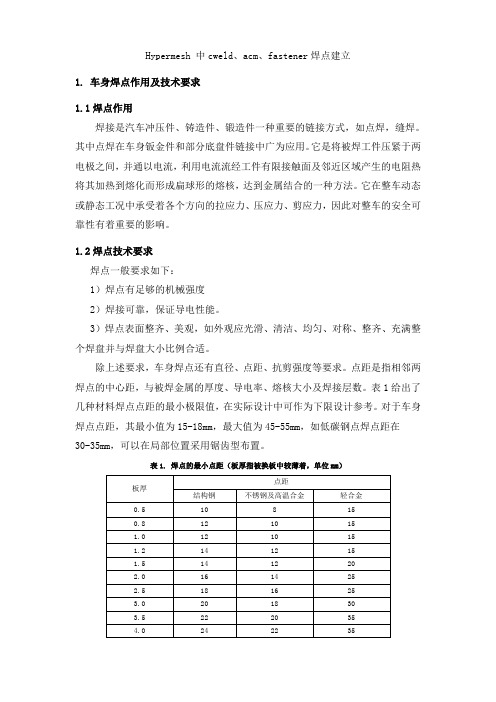
表1给出了几种材料焊点点距的最小极限值,在实际设计中可作为下限设计参考。
对于车身焊点点距,其最小值为15-18mm,最大值为45-55mm,如低碳钢点焊点距在30-35mm,可以在局部位置采用锯齿型布置。
表1. 焊点的最小点距(板厚指被换板中较薄着,单位mm)表1. 源于中国机械工程学会焊接学会编著《焊接手册(第1卷)-焊接方法及设备》对于车身焊点直径,其取值范围为4-8mm,一般焊点直径可取为6mm,关键焊点直径可取为7mm。
表2给出四种钢材焊点直径的最小极限值,在实际设计中可作为下限设计参考。
表2. 焊点最小直径(板厚指被换板中较薄着,单位mm)注:表2源于傅积和、孙玉林主编《焊接数据资料手册》焊点失效以剪切破坏为主,其抗剪性能与其大小有直接关系,具体要求参见傅积和、孙玉林主编《焊接数据资料手册》。
焊点抗剪强度测量方式如下:图1.1 抗剪强度测量示意图2.焊点单元基于焊点的重要性,在汽车CAE分析中,尤其在白车身相关分析中焊点的模拟尤为重要。
HyperMesh入门教程
下拉菜单区
实体对象集
Page 15
Geom:几何命令宏菜单
Tools:
1. Isolate surf:从一个三维模型中提出一个内部或 外部表面层。这个宏只作用于与选定的曲面附在 一起的曲面。其他层和厚度随后被放在一个临时 目录中隐藏。
几何工具 2. ThinSolid=>Midsurf:用一条边找出与之相连的 面,所组成的闭合三维几何,抽取其中面。
• 一个实体只能属于一个给定类型的collector • 例如:一个单元只能放在一个component中
• 可以创建多个同一类型的collector • 同一个collector中的实体具有相同颜色 • 可以按照用户的需要进行组织
Component 3
Component 4
Component 1 Component 2
• 坐标系(坐标轴)
• 向量
向量
• 参考实体
• 集(特定类型实体的简单列表)
• 块(包含在方盒空间内的实体列表)
• 一维单元横截面
• 梁截面(用于定义单元属性中的截面属性)
坐标系 梁截面
Page 24
HyperMesh 实体类型
• 绘图
• curve曲线(X-Y 数据) • plot绘图窗口(带坐标轴的曲线显示)
加Shift键后的对应菜单
颜色(color) 临时节点(temp nodes) 边(edges) 移动(translate) 寻找(find) 分割(split) 投影(project) 节点编辑(node edit) 面编辑(surf edit) 法线(normal) 组织(organize) 平滑(smooth)
• Handles –控制柄:用于在变形过程中控制模型形状 • Domains – 域:用于把模型分成若干区域 (针对基于domain的morphing) • Morph volume – 变形体积块:通过体积块的变形控制体积块内网格的变形(针对基于
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Hypermesh 中cweld、acm、fastener焊点建立
1.车身焊点作用及技术要求
1.1焊点作用
焊接是汽车冲压件、铸造件、锻造件一种重要的方式,如点焊,缝焊。
其中点焊在车身钣金件和部分底盘件中广为应用。
它是将被焊工件压紧于两电极之间,并通以电流,利用电流流经工件有限接触面及邻近区域产生的电阻热将其加热到熔化而形成扁球形的熔核,达到金属结合的一种方法。
它在整车动态或静态工况中承受着各个方向的拉应力、压应力、剪应力,因此对整车的安全可靠性有着重要的影响。
1.2焊点技术要求
焊点一般要求如下:
1)焊点有足够的机械强度
2)焊接可靠,保证导电性能。
3)焊点表面整齐、美观,如外观应光滑、清洁、均匀、对称、整齐、充满整个焊盘并与焊盘大小比例合适。
除上述要求,车身焊点还有直径、点距、抗剪强度等要求。
点距是指相邻两焊点的中心距,与被焊金属的厚度、导电率、熔核大小及焊接层数。
表1给出了几种材料焊点点距的最小极限值,在实际设计中可作为下限设计参考。
对于车身焊点点距,其最小值为15-18mm,最大值为45-55mm,如低碳钢点焊点距在30-35mm,可以在局部位置采用锯齿型布置。
表1. 焊点的最小点距(板厚指被换板中较薄着,单位mm)
0.8 12 10 15
1.0 12 10 15
1.2 14 12 15
1.5 14 12 20
2.0 16 14 25
2.5 18 16 25
3.0 20 18 30
3.5 22 20 35
4.0 24 22 35
表1. 源于中国机械工程学会焊接学会编著《焊接手册(第1卷)-焊接方法及设备》
对于车身焊点直径,其取值围为4-8mm,一般焊点直径可取为6mm,关键焊点直径可取为7mm。
表2给出四种钢材焊点直径的最小极限值,在实际设计中可作为下限设计参考。
表2. 焊点最小直径(板厚指被换板中较薄着,单位mm)
注:表2源于傅积和、主编《焊接数据资料手册》
焊点失效以剪切破坏为主,其抗剪性能与其大小有直接关系,具体要求参见傅积和、主编《焊接数据资料手册》。
焊点抗剪强度测量方式如下:
图1.1 抗剪强度测量示意图
2.焊点单元
基于焊点的重要性,在汽车CAE分析中,尤其在白车身相关分析中焊点的模拟尤为重要。
Fastener(abaqus 单元类型)单元、Cweld(nastran单元类型)单元和ACM单元是现在汽车行业应用最多也是广为认可的焊点模拟方法。
下面以车身接头为例,介绍在hypermesh中如何建立这三种单元。
2.1几何处理
导入几何,抽中面(以壳模拟钣金件)后如图2.1所示。
黄色为焊点几何,来自于CAD模型,用于焊点单元建立定位。
图2.1 接头几何示意图
2.2部件属性设置
先定义部件属性,如图2.2所示,厚度定义在creat/edit里设置好,一定要设置厚度,否则在ACM焊点单元建立时会出现奇异(下文将会讲到)。
属性定义好之后赋予相应的部件。
也可以先画网格,再定义部件属性。
图2.2 部件属性定义
图2.3 赋予部件属性
2.3 网格划分
先几何处理,然后根据部件尺寸和分析要求选择合适的尺寸划分网格。
如图2.4所示,选择边长均值为6mm的四边形单元划分网格。
图2.4 接头的FE模型
2.4 cweld焊点单元建立
nastran用户界面下,在1D板面点击connectors,如图2.5所示。
图2.5 1D 板面
进入后点击spot,开始建立cweld 焊点,如图2.6所示
图2.6 spot 窗口
1)location。
从location右侧的下拉菜单中选择用于焊点定位的参数。
如果焊点几何
点存在,可以直接用points定位;如果无几何点,但几何面存在,可以
选择lines、nodelist、nodes;如果仅有网格,可以选择用nodes或
nodelist来定位。
此处选points,然后在操作界面中框选模型,图2.7
中所见的高亮点。
图2.7 焊点几何点选择
2)connect what
点击contact 右侧的comps,选择焊点连接的部件,被选中的部件会高亮显示,如图2.8所示。
注意,当模型复杂时,可依据连接件将焊点分类,放到不同的component中。
图2.8连接件选择
3)num layers
num layers 用以设置点焊层数,根据实际情况从下拉菜单中选择对应的层数。
此模型选择total2,如图2.8所示。
4)tolerance
tolerance用以设置容差,以便在components之间建立焊点,一般不小于连接件的中面间距。
此处设置为2.0
图2.9 tolerance设置
5)type
点击type会出现焊点类型的窗口。
此处选择cweld(GA-GB ELEMID),如图2.10所示,选好后点击return返回。
Type正下方的下拉菜单对建模没有影响,接受dafault post script选项。
图2.10 CWELD单元选择
6)diameter
diameter设置焊点直径(单位mm),此处输入5.0
7)creat
将焊点几何所在的component设为当前,点击creat。
创建好焊点的模型如图2.11所示。
图2.11 FE模型
注:此时会自动生成一个property(图2.12),需要自己手动修改材料,如果焊点直径在diameter中设置错误,可以在HM_PWELD中修改。
图2.12 property列表
2.5 acm焊点单元建立
重复上述1-7步建立acm单元,只需要在第五步type选择时,从下拉菜单中选择ACM单元,此处选择acm(equivalenced-(T1+T2)/2)。
建好焊点后的模型如图2.14.
图2.13 acm单元选择
图2.14 acm单元选择
注:Acm是用六面体实体单元模拟焊点,实体的高度与连接件间距相等,实体的边长与设置的直径有关。
在建立acm单元前,如果没设置连接件的厚度属性,在建里ACM单元时会发现,生成的六面体是一个高度趋于零的六面体,导致aspact指标无限大。
这就是为什么先定义部件属性才开始网格和单元建立。
在创建好acm单元后会自动生成两个component和一个property,需手动设置生成的property里的材料。
图2.15 component和property列表
2.6 fastener焊点单元建立
在abaqus用户下,按照2.4节的1-7步建立fastener单元,在第五步type 从下拉菜单中选择fastener单元。
建好焊点后的模型如图 2.17.
图2.16 fastener单元选择
图2.17 acm单元选择
注:在创建好fastener单元后会自动生成一个焊点的component,两个property---焊点的属性和横截面属性。
图2.18 component和property列表
对于焊点属性卡片里的材料选项可以不设置,横截面属性里的截面行为选项页可不设置。
图2.18 HM_ConnecorSection卡片设置
图2.19 HM_FastenerProperty卡片设置
3.焊点类型对结构模态的影响
焊点的分布和直径对结构刚度有直接的影响,从而导致结构模态差异。
在同一结构中,即使焊点分布和大小均相同,有限元选择不同的焊点单元,也会导致仿真结果的差异。
基于上述三种模型进行自然模态分析,其对比结果如下:模态阶数Cweld 单元Acm单元Fastener单元
1 356.3 376.8 395.88
2 449.1 449.6 453.3
3 459.6 462.
4 468.84
4 515.4 547.
5 579.9
5 558.4 570.
6 594.3。