DMU运动仿真教案(视频版)
CATIA_DMU机构运动分析新手教程

第五章DMU 机构运动分析1 第五章CATIA V5 DMU 机构运动分析目录1产品介绍 (4)2图标功能介绍(基本概念、基本界面介绍) (4)2.1DMU运动仿真(DMU Simulation)工具条 (4)2.2DMU运动副创建工具条(Kinematics Joints) (4)2.3DMU Generic Animation (5)2.4机构刷新(DMU Kinematics Update) (6)2.5干涉检查模式工具条(Clash Mode) (6)2.6DMU 空间分析(DMU Space Analysis) (6)3功能详细介绍 (7)3.1DMU运动仿真(DMU Simulation)工具条 (7)3.1.1用命令驱动仿真(Simulating with Commands) (7)3.1.2用规则驱动仿真(Simulating With Laws) (9)3.1.3仿真感应器(Sensors) (10)3.1.4机构修饰(Mechanism Dressup) (12)3.1.5创建固定副(Fixed Part) (12)3.1.6装配约束转换(Assembly Constraints Conver) (13)3.1.7测量速度和加速度(Speeds and Accelerations) (15)3.1.8机构分析(Mechanism Analysis) (17)3.2DMU运动副创建工具条(Kinematics Joints) (19)3.2.1创建转动副(Creating Revolute Joints)点击 (19)3.2.2创建滑动副(Creating Prismatic Joints) (20)3.2.3同轴副(Creating Cylindrical Joints) (21)3.2.4创建球铰连接(Creating Spherical Joints) (22)3.2.5创建平动副(Creating Planar Joints) (23)3.2.6创建刚性副(Rigid Joints) (24)3.2.7点-线副(Point Curve Joints) (24)3.2.8曲线滑动副(Slide Curve Joints) (25)3.2.9点-面副(Point Surface Joints) (26)3.2.10万向节(Universal Joints) (26)3.2.11C V连接(CV Joints) (27)3.2.12创建齿轮副(Gear Joints) (28)2 第五章CATIA V5 DMU 机构运动分析3.2.13滑动-转动复合运动副(Rack Joints) (30)3.2.14滑动-滑动复合运动副(Cable Joints) (32)3.2.15用坐标系法建立运动副(Creating Joints Using Axis Systems) (32)3.3DMU Generic Animation工具条 (34)3.3.1创建运动仿真记录(Simulation) (34)3.3.2生成重放文件(Generate Replay) (36)3.3.3重放(Replay) (37)3.3.4仿真播放器(Simulation Player) (37)3.3.5编辑序列(Edit Sequence) (37)3.3.6包络体(Swept Volume) (37)3.3.7生成轨迹线(Trace) (37)3.4机构刷新(DMU Kinematics Update) (38)3.4.1机构位置刷新(Update) (38)3.4.2输入子机构(Import Sub-Mechanisms) (38)3.4.3重设位置(Reset Positions ) (39)3.5干涉检查模式工具条(Clash Mode) (40)3.5.1关闭干涉检查(Clash Detection(Off) (40)3.5.2打开干涉检查(Clash Detection(On) (40)3.5.3遇到干涉停止(Clash Detection(Stop) (40)3.6DMU 空间分析(DMU Space Analysis) (40)3.6.1干涉检查(Clash) (40)3.6.2距离和距离带分析(Distance and band analysis) (40)3.7示例 (41)3 第五章CATIA V5 DMU 机构运动分析1 产品介绍DMU机构运动分析(Kin )是专门做DMU装配运动仿真的模块。
CATIA_DMU机构运动分析

第五章DMU 机构运动分析 1 第五章CATIA V5 DMU 机构运动分析目录 1产品介绍 (4)2图标功能介绍(基本概念、基本界面介绍) (4)2.1DMU运动仿真(DMU Simulation)工具条 (4)2.2DMU运动副创建工具条(Kinematics Joints) (4)2.3DMU Generic Animation (5)2.4机构刷新(DMU Kinematics Update) (6)2.5干涉检查模式工具条(Clash Mode) (6)2.6DMU 空间分析(DMU Space Analysis) (6)3功能详细介绍 (7)3.1DMU运动仿真(DMU Simulation)工具条 (7)3.1.1用命令驱动仿真(Simulating with Commands) (7)3.1.2用规则驱动仿真(Simulating With Laws) (9)3.1.3仿真感应器(Sensors) (10)3.1.4机构修饰(Mechanism Dressup) (12)3.1.5创建固定副(Fixed Part) (12)3.1.6装配约束转换(Assembly Constraints Conver) (13)3.1.7测量速度和加速度(Speeds and Accelerations) (15)3.1.8机构分析(Mechanism Analysis) (17)3.2DMU运动副创建工具条(Kinematics Joints) (19)3.2.1创建转动副(Creating Revolute Joints)点击 (19)3.2.2创建滑动副(Creating Prismatic Joints) (20)3.2.3同轴副(Creating Cylindrical Joints) (21)3.2.4创建球铰连接(Creating Spherical Joints) (22)3.2.5创建平动副(Creating Planar Joints) (23)3.2.6创建刚性副(Rigid Joints) (24)3.2.7点-线副(Point Curve Joints) (24)3.2.8曲线滑动副(Slide Curve Joints) (25)3.2.9点-面副(Point Surface Joints) (26)3.2.10万向节(Universal Joints) (26)3.2.11CV连接(CV Joints) (27)3.2.12创建齿轮副(Gear Joints) (28)2 第五章CATIA V5 DMU 机构运动分析3.2.13滑动-转动复合运动副(Rack Joints) (30)3.2.14滑动-滑动复合运动副(Cable Joints) (32)3.2.15用坐标系法建立运动副(Creating Joints Using Axis Systems) (32)3.3DMU Generic Animation工具条 (34)3.3.1创建运动仿真记录(Simulation) (34)3.3.2生成重放文件(Generate Replay) (36)3.3.3重放(Replay) (37)3.3.4仿真播放器(Simulation Player) (37)3.3.5编辑序列(Edit Sequence) (37)3.3.6包络体(Swept Volume) (37)3.3.7生成轨迹线(Trace) (37)3.4机构刷新(DMU Kinematics Update) (38)3.4.1机构位置刷新(Update) (38)3.4.2输入子机构(Import Sub-Mechanisms) (38)3.4.3重设位置(Reset Positions) (39)3.5干涉检查模式工具条(Clash Mode) (40)3.5.1关闭干涉检查(Clash Detection(Off) (40)3.5.2打开干涉检查(Clash Detection(On) (40)3.5.3遇到干涉停止(Clash Detection(Stop) (40)3.6DMU 空间分析(DMU Space Analysis) (40)3.6.1干涉检查(Clash) (40)3.6.2距离和距离带分析(Distance and band analysis) (40)3.7示例 (41)3 第五章CATIA V5 DMU 机构运动分析4 第五章CATIA V5 DMU 机构运动分析1 产品介绍DMU 机构运动分析(Kin )2 图标功能介绍(基本概念、基本界面介绍)是专门做DMU 装配运动仿真的模块。
汽车研发:DMU(数字化电子样车)校核的内容、方法及流程!

汽车研发:DMU(数字化电子样车)校核的内容、方法及流程!很多兄弟走在路上,看到身材很棒的妹纸,都喜欢走到妹子的前面,回过身来假装往后看,校核一下妹纸的脸蛋,其实汽车也要校核,经过校核,能查出很多问题,提升设计,降低量产后的问题。
今天漫谈君就和大家讲一讲:DMU(数字化电子样车)校核随着汽车工业的发展,计算机三维设计技术的使用,DMU校核已经发展为研发工作中重要的一项工作。
随着产品更新换代速度的加快,现有样机的制造周期和制造成本已难以适应产品开发的需求,使用计算机三维设计技术建立数字样机,可实现实物样机的作用,有效缩短周期、降低成本。
一、DMU是什么DMU是Digital Mock—Up的缩写,又叫数字化电子样车,指一个正确的、完整的整车三维数模,是由3D软件设计出的零部件按照其内在逻辑而组成的结构性的虚拟样车模型,而且这个虚拟样车可以进行不同的模拟和评价。
二、DMU的作用1、对整车设计进行检查和监控,并指出相关的问题,以便保证设计质量和项目进度。
2、提供各类、各种档次的可视化功能,用不同方式对电子样车进行全方位的审视、评估和模拟真实的视觉效果。
尽可能在数字化环境中看到产品在真实世界中相同的效果,实现低成本、高效率的产品可视化模拟。
3、对车型或部件间进行功能性分析,包括:机构运动、干涉、拆装、空间和管理分析等。
尽可能在数字化环境中进行与真实世界中相同的分析,使设计师在设计早期就发现问题,在设计的各个阶段,及时、大量地进行各种分析,提高产品设计质量。
4、应用关联设计,按照自上向下的设计方式,实现装配之间、零部件之间、一个模型文件中的多个几何实体之间、曲面模型和实体模型之间、特征之间等多种层次的端到端的各类关联。
基于骨架的DMU 设计分析方式,实现数字样机的快速更改,降低成本,快速地进行多方案的评估与研讨,通过建立关联性的设计模板进行管理和重用,提高设计效率。
5、检查配置及零件完整性。
三、DMU校核内容1、DMU静态干涉检查静态干涉检查是DMU中也是整车设计中最重要的部分,干涉检查根据项目周期可以分为:1)设计过程中干涉检查;2)后期进行验证干涉检查;3)后期发生设计变更后的干涉检查。
CATIA DMU培训课件

3
预研和基础技术研究院-整车架构部
1、DMU简介
DMU为电子样机的英文缩写,英文名称:Digital Mock-Up;是对产品的真实 化计算机模拟,满足各种各样的功能,提供用于工程设计、加工制造、产品 拆装维护的模拟环境;是支持产品和流程、信息传递、决策制定的公共平台; 覆盖产品从概念设计到维护服务的整个生命周期。
预研和基础技术研究院-整车架构部
2012-2-22
整车架构部:王养兵 2012年02月22日
1
预研和基础技术研究院-整车架构部
2012-2-22
整车架构部:王养兵 2012年02月22日
2
预研和基础技术研究院-整车架构部
目录
ØDMU简介 ØDMU运动机构介绍 ØDMU空间分析 ØDMU装配
2012-2-22
三、DMU拆装分析
DMU拆装是对产品拆装过程的演示,也可在拆装过程中进行动态的检查产 品与周边件之间的关系,拆装主要包含拆装路径的定义和优化,拆装过程 中德动态干涉检查、工具空间的校核等
轨迹记录器 颜色变换器 序号编辑器
播放器
2012-2-22
复位 路径追踪器 光顺
可拆装 的组件
包络体 9
爆炸图
预研和基础技术研究院-整车架构部
2012-2-22
10
预研和基础技术研究院-整车架构部
四、DMU空间分析
该模块是通过干涉检查、截面分析、距离测量等手段来对几何模型的一种校 核,以期消除模型中存在的结构问题。
2012-2-22
11
预研和基础技术研究院-整车架构部
2012-2-22
12
2012-2-22
4
2.1 运动机构
预研和基础技术研究院-整车架构部
DMU运动仿真教案(相对完整版)

1.录制此教程纯属本人业余爱好,欢迎免费转载。
任 何组织和个人未经许可,不得用于商业用途。
2. 在录制过程中假定大家已经对CATIA这个软件有一 定的认识。
故此,对于CATIA三维建模系列模块涉及 到的功能,就不再详细讲解。
3.由于达索系列软件博大精深,本人能力有限,难免 出现错误。
若您发现错误,请告知与我,无比感激。
一.数字模型简介 二.数字模型浏览器模块 的几个常用功能一.数字模型简介Digital Mockup,译为数字化模型或者电子样机。
简称 “DMU”。
DMU可以具备从产品设计、制造到产品维护整个生命周期所 需的多项功能。
如包含:装配关系、公差、干涉检查、工艺、 材料、制造资源、人力资源、成本、安装拆卸、机构运动、 截面扫描、人机互动等等。
其实产品的三维建模就是DMU最基本的一步。
接下来就从DMU运动仿真模块的基本内容开始,和大家共同 学习下CATIA的DMU运动仿真的内容。
二.数字模型浏览器模块的几个常用功能1.1 英文界面1.2 中文界面DMU审查创建 DMU一般动画2.1 插入相机2.2 相机属性2.3 相机窗口4.1 轨迹工具条轨迹对话框记录器工具条 播放工具条4.2 实体的轨迹生成操作工具条4.3 相机的轨迹生成。
SolidWorks课件教案第13章 运动仿真

(3)在“弹簧”属性管理器中设置其他参数,单击“确定”,完成 弹簧的创建。 (4)单击MotionManager工具栏中的“计算”按钮,计算模拟。 MotionManager界面如图所示。
13.1.4 接触
接触仅限基本运动和运动分析,如果零部件碰撞、滚动或滑动,可以在 运动算例中建模零部件接触。还可以使用接触来约束零件在整个运动分析过 程中保持接触。默认情况下零部件之间的接触将被忽略,除非在运动算例中 配置了“接触”。如果不使用“接触”指定接触,零部件将彼此穿越。
(1)单击MotionManager工具栏中的“接触 “按钮,弹出如图所示的“接触”属性管理器。 (2)在“接触”属性管理器中选择“实体”,然 后在绘图区域选择两个相互接触的零件,添加它 们的配合关系。 (3)在“材料”栏中更改两个材料类型分别为 “Steel(Dry)”与“Aluminum(Dry)”属性 管理器中设置其他参数,单击“确定”,完成接 触的创建。
13.1.3 阻尼
如果对动态系统应用了初始条件,系统会以不断减小的振幅振动,直到最终停 止。这种现象称为阻尼效应。阻尼效应是一种复杂的现象,它以多种机制(例 如内摩擦和外摩擦、轮转的弹性应变材料的微观热效应、以及空气阻力)消耗 能量。
(1)单击MotionManager工具栏中的“阻尼“按钮,弹出 “阻尼”属性管理器。 (2)在“阻尼”属性管理器中选择“线性阻尼”,然后在 绘图区域选取零件上弹簧或阻尼一端所附加到的面或边线。 此时在绘图区域中被选中的特征将高亮显示。 (3)在“阻尼力表达式指数”和“阻尼常数”中可以选择 和输入基于阻尼的函数表达式,单击“确定”,完成接触 的创建。
优选CATIA实用DMU运动仿真小教程

一、功能介绍
模块简介
功能键一览表
过程 将装配件导入DMU模块----建立机械装置----分析运动结合类型 ----建立运动结合----约束固定件----设置驱动形式----运动仿真
运动仿真有两种: 1、使用命令进行模拟 (可编辑传感器) 2、模拟 (可生成自动播放动画,也可编辑传感器)----可通 过编译模拟 ,生成重放 。
4. 固定零件
单机
中的 按钮,弹出右图所示窗口
,然后直接左键单击壳体part,这时系统会出现“可以模拟机
械装置”提示,点击确定
5、设置驱动形式
注意此时机械装置自由度=0,若不为0不能仿真 的,此项尤为重要。 修改: 下限改为-65°;上限改为0°
6、使用命令进行模拟
点击
中的 (使用命令
进行模拟)按钮,弹出右图所示窗口,电机“模
(4)其他约束 用旋转指令 将以下几个产品之间互相约束一起来。 ①、“波轮与连杆”;旋转副 ②、“连杆与风门连杆”;旋转副 ③、“风门连杆与壳体”;旋转副
壳体 波轮
连杆 命令在运动机构里面,点击其图标右下方的箭 头,点击后,选择图标
然后点击“风门连杆”跟“风门”
(3)约束 图中直线1、直线2、平面1、平面2,依次 选取壳体轴线、波轮轴线、壳体平面、波 轮平面,并单击“偏移”与“驱动角度”按 钮。单击确定
机械装置:运动机构名称 结合名称:运动副名称 直线1:波轮轴 直线2:壳体轴 平面1:破轮平面 平面2:壳体平面 驱动角度:点选可驱动波轮转动角度. (注意:驱动点选后自由度-1)
拟下的立刻”按钮,便可拖动上面的游标随意旋
转,也可使用“按需要”命令,修改一下右上角数
字框中的数据,就可点击下方的 箭头标示
adams运动仿真教学

起重机的建模和仿真,如下图所示。
1)启动ADAMS1. 运行ADAMS,选择create a new model;2. modal name 中命名为lift_mecha;3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。
2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box按钮4. 设置实体参3.53.数;On ground Length :12Height:4Depth:85. 鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing—working grid ,设置spacing中X和Y均为0.510. 选择圆柱实体绘图按钮,设置参数:New partLength:10mRadius:1m选择座架的中心点,点击左侧确定轴肩方向,建立轴肩,单击三维视图按钮,观察视图11. 继续圆柱工具,绘制悬臂①设置参数:New partLength: 13mRadius: 0.5m②选择Mount.cm作为创建点,方向同轴肩,建立悬臂③右键选择新建的悬臂,在快捷菜单中选择part_4——Rename,命名为boom④选择悬臂,移动方向沿X轴负向,实现悬臂的向左移动:1)右键选择工具箱中的position按钮中的move按钮2)在打开的参数对话框中,选择vector,distance中输入2m,点击悬臂,实现移动⑤右键点击实体建模按钮,在弹出的下一级菜单中选择导圆角工具,设置圆角半径为1.5m⑥左键选择座架上侧的两条边,点击右键,完成倒角12. 选择box按钮图标,创建铲斗①设置参数:New partLength : 4.5Height: 3.0Depth: 4.0②选择悬臂左侧中心点,命名为bucket,建立铲斗③右键选择position按钮下一级按钮move按钮④在打开的参数对话框中,选择vector,distance中输入2.25m,选择铲斗,移动方向沿全部坐标系X轴负方向,实现铲斗的横向移动⑤在主工具箱中,选择三维视图按钮,察看铲斗⑥继续选择move按钮,设置参数中选择vector,distance中输入2.0m,选择铲斗,移动方向沿全部坐标系 Z轴负方向,实现铲斗的纵向移动⑦移动完毕,选择主工具箱中的渲染按钮render,察看三维实体效果,再次选择render按钮,实体图则以线框显示⑧右键点击实体建模按钮,再弹出的下一级按钮中选择倒角工具,在打开的参数设置对话框中,设置倒角Width为1.5m,⑨选择铲斗下侧的两条边,完毕单击右键,完成倒角⑩右键选择实体建模工具按钮,再下一级按钮中选择Hollow按钮,在打开的参数设置对话框中设置参数Thickness为0.25m选择铲斗为挖空对象,铲斗上平面为工作平面,完毕点击右键挖空铲斗3)添加约束根据图示关系,添加链接①在主工具箱中,选择转动副,下方的参数设置对话框中,设置参数 2 bod——1 loc和pick feature②选择基座和座架,然后选择座架中心Mount.cm,旋转轴沿y轴正向,建立座架与基座的转动副③继续用转动副按钮,建立轴肩与座架间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择轴肩和座架,再选择座架中心点,建立转动副④继续用转动副按钮,建立铲斗与悬臂间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择铲斗与悬臂,再选择铲斗下侧中心点,建立转动副⑤选择主工具箱中的平动副,设置参数2 bod——1 loc和pick feature,选择悬臂与轴肩,再选择悬臂中心标记点,移动方向沿X轴正方向,建立悬臂和轴肩间的平动副⑥右键点击窗口右下角的Information 信息按钮,选择约束按钮,观察是否按要求施加约束,关闭信息窗口⑦检查完毕,选择仿真按钮,对系统进行仿真,观察系统在重力作用下的运动4)添加运动①选择主工具箱中的旋转运动按钮,右键点击座架中心标记点,在弹出的选择窗口中,选择JOINT_mount_ground,给座驾与基座的转动副添加转动运动②选择俯视图按钮,观察旋转运动副的箭头图标③右键点击该运动,在弹出的快捷菜单中选择motion_mount_ground——modify在修改对话框中,修改function项为360d*time④重复上述动作,在轴肩和座架之间建立旋转运动Motion_shoulder_ground,⑤右键点击该运动,在弹出的快捷菜单中选择motion_shoulder_ground——modify在修改对话框中,修改function项为-STEP(time,0,0,0.10,30d)⑥重复上述动作,在铲斗和悬臂之间建立旋转运动Motion_bucket_boom⑦设置运动函数为45d*(1-cos(360d*time))⑧右键点击主工具箱中旋转运动按钮,选择下一级平行运动按钮,点击悬臂中心平动副,在悬臂和座架间建立平行运动⑨设置平行运动函数为STEP(time,0.8,0,1,5)⑩选择主工具箱中的仿真按钮,设置仿真参数END Time:1;Steps:100,进行仿真5)测量和后处理①鼠标右键点击铲斗,打开右键快捷键,选择测量measure②系统打开参数设置对话框,将Characteristic设置为CM Point,Component 设置为Y,测量Y向位移。
CATIA_DMU运动分析
CATIA DMU运动分析1.1 曲轴连杆运动分析四缸发动机曲轴、连杆和活塞的运动分析是较复杂的机械运动。
曲轴做旋转运动,连杆左做平动,活塞是直线往复运动。
在用CATIA作曲轴、连杆和活塞的运动分析的步骤如下所示。
(1)设置曲轴、连杆、活塞及活塞销的运动连接。
(2)创建简易缸套机座。
(3)设置曲轴与机座、活塞与活塞缸套之间的运动连接。
(4)模拟仿真。
(5)运动分析。
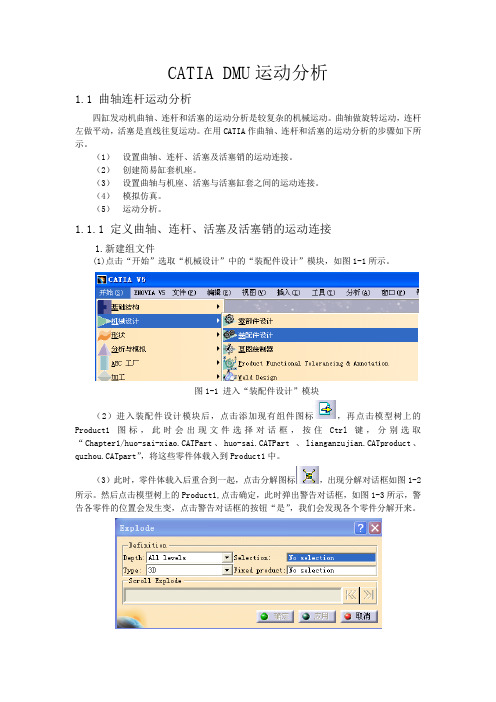
1.1.1 定义曲轴、连杆、活塞及活塞销的运动连接1.新建组文件(1)点击“开始”选取“机械设计”中的“装配件设计”模块,如图1-1所示。
图1-1 进入“装配件设计”模块(2)进入装配件设计模块后,点击添加现有组件图标,再点击模型树上的Product1图标,此时会出现文件选择对话框,按住Ctrl键,分别选取“Chapter1/huo-sai-xiao.CATPart、huo-sai.CATPart 、lianganzujian.CATproduct、quzhou.CATpart”,将这些零件体载入到Product1中。
(3)此时,零件体载入后重合到一起,点击分解图标,出现分解对话框如图1-2所示。
然后点击模型树上的Product1,点击确定,此时弹出警告对话框,如图1-3所示,警告各零件的位置会发生变,点击警告对话框的按钮“是”,我们会发现各个零件分解开来。
图1-2 分解对话框图1-3 警告对话框(3)由于连杆体零件是装配体,各部分之间存在约束,点击“全部更新”按钮,我们会发现连杆体组件恢复装配后的样子。
(4)点击“约束”工具栏中的“相合约束”图标,分别选择活塞销中心线及活塞孔中心线,如图1-4所示。
然后点击“约束”工具栏中的“偏移约束”图标,选择活塞销的一个端面及活塞孔一侧的凹下去细环端面,如图1-5所示,此时出现“约束属性”对话框,如图1-6所示。
将对话框中的“偏移”一栏改为“3.75mm”,点击“确定”按钮,完成活塞销端面和活塞内凹孔细环端面之间的偏移约束关系。
SolidWorks运动仿真完全教程
15
运动副基础知识(6)
In Line点在直线上
In Plane点在面内
方向
指定 的面
连接点
连接点
X参考轴
约束2个移动自由度
约束构件1的连接点,只能沿着构件2连接点 标记的Z轴运动
© 2007 SolidWorks Corp. Confidential.
a Concentric joint.
– 一个正交同轴配合转化为同轴副
One Coincident and One Orthogonal Concentric mates in
SolidWorks becomes a Revolute joint.
– 一个重合和一个正交同轴配合转化为一个转动 副
One Point to Point coincident mate in SolidWorks
Pendulum restrained to pivot about mounting point
5
Constraint Mapping约束映射
▪ Mapping of SolidWorks assembly mates (constraints) to COSMOSMotion joints.
映射SolidWorks装配体配合(约束)为 COSMOSMotion的运动副
运动约束 PointPoint PointPointDist PointLine PointLineDist PointPlaneDist PointPlaneDist PointLineDist PointLine LineLine LineLineDist LineLineAng LineLineAng (0 deg.) LineLineAng (90 deg.)
(整理)CATIA运动仿真DMU空间分析.

(整理)CATIA运动仿真DMU空间分析.CATIA运动仿真DMU空间分析CATIA的DMU空间分析模块可以进⾏设计的有效性评价。
它提供丰富的空间分析⼿段,包括产品⼲涉检查、剖⾯分析和3D⼏何尺⼨⽐较等。
它可以进⾏碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。
它能够处理电⼦样机审核及产品总成过程中经常遇到的问题,能够对产品的整个⽣命周期(从设计到维护)进⾏考察。
DMU空间分析能够处理任何规模的电⼦样车,它适⽤于从⽇⽤⼯具到重型机械⾏业的各种企业。
X.1 相关的图标菜单CATIA V5的空间分析模块由⼀个图标菜单组成:空间分析(DMU Space Analysis)Clash: ⼲涉检查Sectioning: 剖⾯观察器Distance and Band Analysis: 距离与⾃定义区域分析Compare Products: 产品⽐较Measure Between: 测量距离和⾓度Measure Item: 单项测量Arc through Three Points: 测量过三点的圆弧Measure Inertia: 测量惯量3D Annotation: 三维注释Create an Annotated View: 建⽴注释视图Managing Annotated Views: 管理注释视图Groups: 定义产品组x.2 空间分析模块的环境参数设定在开始使⽤CATIA V5的空间分析模块前,我们可以根据⾃⾝的习惯特点,合理地设定其环境参数。
在菜单栏中使⽤下拉菜单Tools→Option→Digital Mockup打开DMU Space Analysis的环境参数设定界⾯,在此窗⼝中有六个标签,分别对应不同的参数设定。
x.2.1 ⼲涉检查设置(DMU Clash)该设置针对Clash命令,允许设置以下内容:Retrieve Information:得到⼲涉的结果From previous computation:从前⼀个计算得到分析结果From PDM(UNIX only with ENOVIA VPM):从PDM中得到分析结果(在UNIX系统下是ENOVIA VPM)None:(缺省)⽆⽐较Results Window /Automatically open:当进⾏⼲涉检查时⾃动打开结果显⽰窗⼝Display in Results box:设置缺省的显⽰条⽬list by conflict:冲突列表list by product:产品列表First line automatically selected:(缺省)⾃动选择冲突列表或产品列表的第⼀⾏Type of Computation:设置冲突的缺省类型和缺省的安全距离During Initial Computation:计算并显⽰所有冲突的深度和最⼩距离x.2.2 ⼲涉检查细节设置(DMU Clash – Detailed Computation)该设置针对Clash命令,允许设置以下内容:Level of Detail:设置细节的级别Element:(缺省)让⽤户全⾯地⼯作于产品级别,直到查明有关的元素。
CATIADMU运动分析

精心整理1产品介绍22.1命令驱动仿真(SimulatingwithCommands )创建固定副(FixedPart)机构分析(MechanismAnalysis)2.2DMU运动副创建工具条(KinematicsJoints)创建同轴副(CreatingCylindricalJoints)创建刚性副(RigidJoints)点-面副(PointSurfaceJoints)创建齿轮副(GearJoints)用坐标系法建立运动副(CreatingJointsUsingAxisSystems)2.3DMUGenericAnimation重放(Replay)仿真播放器(SimulationPlayer)编辑序列(EditSequence)包络体(SweptVolume)生成轨迹线(Trace)2.4机构刷新(DMUKinematicsUpdate)重设位置(ResetPositions)2.5干涉检查模式工具条(ClashMode)遇到干涉停止(C lashDetection(Stop))2.6DMU空间分析(DMUSpaceAnalysis)3功能详细介绍3.1DMU运动仿真(DMUSimulation)工具条3.1.1用命令驱动仿真(SimulatingwithCommands)1).点击图标,出现定义对话框;2).在Mechanism选项的下拉菜单里选择相应的机构;3).在Command.1选项里是第一个驱动命令数值的界限,和在创建驱动副时设置的界限同步;4).激活仿真感应器(ActivateSensors)选项,详见其有关运动仿真的后处理对话框;5).当离开仿真对话框后,系统默认保留当前位置。
点击Reset按钮返回到初始位置;6).点击Analysis...按钮可以添加运动分析项目,比如距离、干涉检查等;7.点击More按钮,展开对话框;有两种仿真方式:a).Immediate直接模拟,用鼠标直接拖着驱动副上的绿色箭头线移动;b).选择Onrequest选项,下面的播放器按钮就会变亮,可以设置固定步幅数(NumberOfSteps)来进行仿真运动。
CATIA运动(DMU)

运动分析培训
2、基础知识介绍
自由度的计算: 根据零件的数量计算自由度,自由度的计算公式: 高副: 凡两构件系通过点或线接触而构成的运动副统称为高副 低副: 两构件通过面接触而构成的运动副统称为低副;
运动分析培训
例如:四连杆机构 自由度的计算: F=3*3-2*4=1 机构可以实现运动。
运动分析培训
4、注意事项
当所有的机构约束好以后,整个相 关联的运动机构的自由度(DOF) 会变成零。这时候把运动过程中固 定的部位用FIX命令约束,运动副 即可按约束运动。
运动分析培训
Simulation(模拟步骤)
点击simulation命令,会出现选择 模拟的运动的过程、重复的次数。
运动分析中的约束,都是通过点、 线、面三个几何元素进行约束。两 个件之间无非是点-点、点-线、点 -面、面-面等几个元素之间的连接。 所以分析机构的运动原理是关键, 原理分析清楚之后,根本无需计算 机构的总自由度,因为软件可以自 行计算。然后通过正确合理的约束 即可达到运动要求。点、面必须按 照要求做出,否则约束会提示错误。
用点在面上约束掉一个自由度 约束完成,所有自由度为零
加上驱动去掉一个约束
运动分析培训
添加固定部件,出现如图的提示,既完
成运动分析的所有约束。
该机构可以模拟运动
运动分析培训
点击simulation进 行模拟,插入模拟 的过程,运动分析 完成。 气弹簧、叉臂式玻 璃升降器、门的闭 合过程、锁开启过 程、滑门等运动机 构的运动分析也有 实例,如果兴趣的 同事可以私下交流。
3、常用命令介绍
3.1 revolute(实体接头)
该命令可以约束5个自由度
该命令用两零件之间的线和面作为约束条件,两线必须同轴,面可以不重合,选择
DMU运动机构模拟举例

DMU运动机构模拟举例(DMU Kinematics)数字样机运动机构模拟(DMU Kinematics),是通过调用已有的多种运动副或者通过自动转换机械装配约束条件而产生的运动副,对任何规模的数字样机进行运动机构定义。
1 进入DMU运动机构模拟模块点击Staert菜单,选择Digital Mockup→DMU Kinematics,即可进入DMU Kinematics界面,打开帮助文件中的jigsaw_with_constraints.CATProduct文件,其中包含五个零件分别是Ring, Cog-wheel, Bearing, Slide, Case。
2 定义运动机构点击工具条DMU Kinematics→Kinematics Joints→Revolute Joint,将弹出旋转运动副创建对话框Joint Creation: Revolute,点击New Mechanism按钮将弹出定义运动机构名称的对话框Mechanism Creation。
3 定义旋转运动副选择Case用于固定Cog-wheel的圆柱孔中心线至Line1,Cog-wheel的圆柱中心线至Line2,此两条直线作为旋转运动副定义所需的两条直线,选择Case与Cog-wheel接触的平面至Plane1,选择Cog-wheel与Case接触的平面至Plane2,此两个平面作为旋转运动副定义所需的两个平面,实际上也可以用端面的两个平面代替,两个平面位置重合。
Case与Cog-wheel的旋转运动副定义对话框如下。
再点击工具条DMU Kinematics→Kinematics Joints→Revolute Joint,将弹出旋转运动副创建对话框Joint Creation: Revolute,不再点击New Mechanism按钮,直接用原来的机构,后面所有都直接用原来的机构。
选择Cog-wheel用于固定Ring的圆柱中心线至Line1,Ring的圆柱孔中心线至Line2,此两条直线作为旋转运动副定义所需的两条直线,选择Cog-wheel与Ring接触的平面至Plane1,选择Ring与Cog-wheel接触的平面至Plane2,此两个平面作为旋转运动副定义所需的两个平面,实际上也可以用端面的两个平面代替,此时需要设置约束偏移值为-1mm。
CATIA DMU机构运动操作指导书

1 前言机构运动分析是在虚拟的环境中模拟产品实际的运动状况。
在DMU环境下进行机构运动分析时,首先根据机构的实际运动状态,运用相应的机构运动副来创建两个零部件之间的相对运动关系;然后创建机构运动的参照物和驱动机构进行运动的驱动源(Command)。
在定义完机构运动所必需的条件之后,就可以对机构运动进行仿真和分析。
建立机构运动的流程如下所示:在动态过程检验机构设计是否符合概念设计阶段对机构所做的定义。
同时,在动态过程中对产品的位置信息、运动特性信息进行检查和分析。
2 功能介绍2.1 DMU运动仿真(DMU Simulation)工具条命令驱动仿真(Simulating with Commands)规则驱动仿真(Simulating With Laws)机构修饰(Mechanism Dressup)创建固定副(Fixed Part)装配约束转换(Assembly Constraints Conver)测量速度和加速度(Speeds and Accelerations)机构分析(Mechanism Analysis)2.2 DMU运动副创建工具条(Kinematics Joints)创建转动副(Creating Revolute Joints)创建滑动副(Creating Prismatic Joints)创建同轴副(Creating Cylindrical Joints)创建球铰连接(Creating Spherical Joints)创建平动副(Creating Planar Joints)创建刚性副(Rigid Joints)点-线副(Point Curve Joints)曲线滑动副(Slide Curve Joints)点-面副(Point Surface Joints)万向节(Universal Joints) CV连接(CV Joints)创建齿轮副(Gear Joints)滑动-转动复合运动副(Rack Joints)滑动-滑动复合运动副(Cable Joints)用坐标系法建立运动副(Creating Joints Using Axis Systems)2.3 DMU Generic Animation创建运动仿真记录(Simulation)生成重放文件(Generate Replay)重放(Replay)仿真播放器(Simulation Player)编辑序列(Edit Sequence)包络体(Swept Volume)生成轨迹线(Trace)2.4机构刷新(DMU Kinematics Update)机构位置刷新(Update)输入子机构(Import Sub-Mechanisms)重设位置(Reset Positions)2.5干涉检查模式工具条(Clash Mode)关闭干涉检查(C lash Detection(Off))打开干涉检查(C lash Detection(On))遇到干涉停止(C lash Detection(Stop))2.6 DMU 空间分析(DMU Space Analysis)干涉检查(Clash)距离和距离带分析(Distance and band analysis)3 功能详细介绍3.1 DMU运动仿真(DMU Simulation)工具条3.1.1用命令驱动仿真(Simulating with Commands)是用命令驱动的方式对已创建的机构进行运动仿真,这种方法比较直接、简便,但不能记录下来。
CATIA DMU实例教程-雨刮器运动仿真
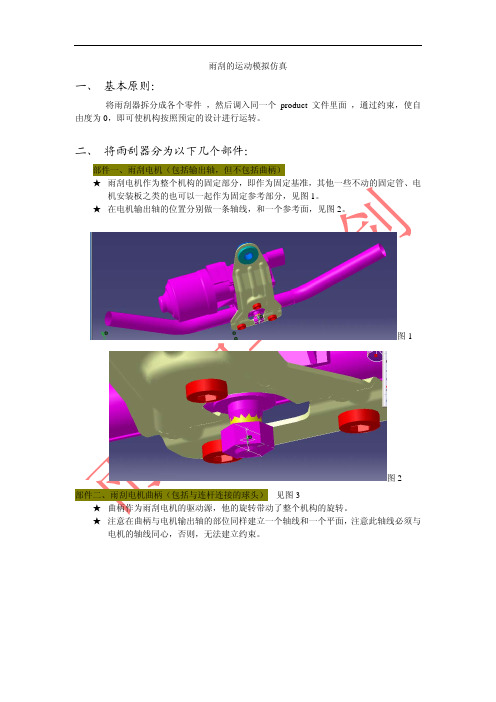
图 15 Line1 和 line2 分别对应前面所建立的轴线(必须同心),plane1 和 plane2 也是前面所建 立的平面,点击 offset 后,系统会计算出两个平面的距离,如为 0,说明你建的平面重回, 如果不为了,后面的运动过程中,两个零件间会始终保持这个距离。然后点击 angle driven, 确定后,则电机和曲柄之间其实就可以模拟运动了,即自由度为 0。 五、建立曲柄球头与连杆球碗处的约束
图 22
图 23 如果想看此最小距离根电机曲柄转动角度之间的关系,可以这样做: 返回图 23,将第一个角度,由“no”转换成“yes”即可,则输出的 excel 文件会包含角度 与距离的关系。右边一行为角度值供 60 个数据(与上述黑色三角的“60 步相对应”),总角 度 360.左边一行为距离值。
机安装板之类的也可以一起作为固定参考部分,见图 1。 ★ 在电机输出轴的位置分别做一条轴线,和一个参考面,见图 2。
图1
图2 部件二、雨刮电机曲柄(包括与连杆连接的球头)---见图 3
★ 曲柄作为雨刮电机的驱动源,他的旋转带动了整个机构的旋转。 ★ 注意在曲柄与电机输出轴的部位同样建立一个轴线和一个平面,注意此轴线必须与
图8
二、建立一个新的运动机构 图9
输入 060630
图 10 确定后点作为固定基准的电机。此时,已经建立了一改以电机为基准的运动机构名称 060630.
此时目录树上的约束分支会出现已经建立的固定约束
图 11
三、建立相对固定约束 出4 此时先点击电机,会在 part1 显示电机的零部件名称,再点击主衬套,则 part2 会显示主衬 套的零部件名称。点击确定,则主衬套就相对于电机固定了。 副衬套相对电机的固定也是按上述操作。 四、建立电机与曲柄的约束
(整理)CATIA运动仿真DMU空间分析.

CATIA运动仿真DMU空间分析CATIA的DMU空间分析模块可以进行设计的有效性评价。
它提供丰富的空间分析手段,包括产品干涉检查、剖面分析和3D几何尺寸比较等。
它可以进行碰撞、间隙及接触等计算,并得到更为复杂和详尽的分析结果。
它能够处理电子样机审核及产品总成过程中经常遇到的问题,能够对产品的整个生命周期(从设计到维护)进行考察。
DMU空间分析能够处理任何规模的电子样车,它适用于从日用工具到重型机械行业的各种企业。
X.1 相关的图标菜单CATIA V5的空间分析模块由一个图标菜单组成:空间分析(DMU Space Analysis)Clash: 干涉检查Sectioning: 剖面观察器Distance and Band Analysis: 距离与自定义区域分析Compare Products: 产品比较Measure Between: 测量距离和角度Measure Item: 单项测量Arc through Three Points: 测量过三点的圆弧Measure Inertia: 测量惯量3D Annotation: 三维注释Create an Annotated View: 建立注释视图Managing Annotated Views: 管理注释视图Groups: 定义产品组x.2 空间分析模块的环境参数设定在开始使用CATIA V5的空间分析模块前,我们可以根据自身的习惯特点,合理地设定其环境参数。
在菜单栏中使用下拉菜单Tools→Option→Digital Mockup打开DMU Space Analysis的环境参数设定界面,在此窗口中有六个标签,分别对应不同的参数设定。
x.2.1 干涉检查设置(DMU Clash)该设置针对Clash命令,允许设置以下内容:Retrieve Information:得到干涉的结果From previous computation:从前一个计算得到分析结果From PDM(UNIX only with ENOVIA VPM):从PDM中得到分析结果(在UNIX系统下是ENOVIA VPM)None:(缺省)无比较Results Window /Automatically open:当进行干涉检查时自动打开结果显示窗口Display in Results box:设置缺省的显示条目list by conflict:冲突列表list by product:产品列表First line automatically selected:(缺省)自动选择冲突列表或产品列表的第一行Type of Computation:设置冲突的缺省类型和缺省的安全距离During Initial Computation:计算并显示所有冲突的深度和最小距离x.2.2 干涉检查细节设置(DMU Clash – Detailed Computation)该设置针对Clash命令,允许设置以下内容:Level of Detail:设置细节的级别Element:(缺省)让用户全面地工作于产品级别,直到查明有关的元素。
MSC Adams多体动力学仿真基础与实例解析
23
MSC Adams 多体动力学仿真基础与实例解析
图 29 创建拉伸体对话框
在下拉列表框中有 New Part、Add to Part、On Ground 选项,分别表示所创建的拉伸体是 新创建、添加到已有的构件上或者属于地面。在 Profile 栏右侧可选择 Points、Curve 选项,分 别表示拉伸体截面可由点或曲线生成。
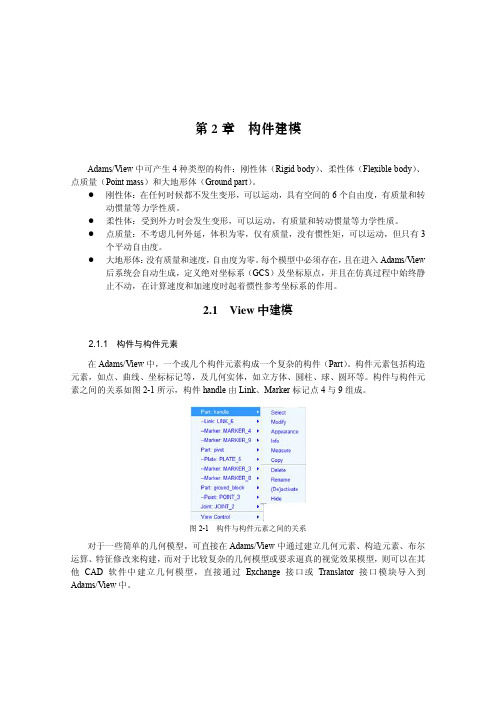
构件建模
第2章
2.1.2 创建构造元素
构造元素包括设计点、标记点、圆、圆弧、直线、质量点、多段线和样条曲线。单击主工 具栏 Bodies>Construction,构造元素工具栏如图 22 所示。
图 22 构造元素工具栏
这些构造元素建模工具的使用方法大同小异,单击不同的按钮,工具界面状态栏会有相应 的提示信息,如图 23 所示,可根据状态栏的提示信息进行操作,下面介绍部分要素的使用方法。
名称 Chamfer Fillet Hole
表 21 模型特征命令 功能
设置参数
倒直角
倒角边长度(Width)
倒圆角 钻孔
圆角半径(Radius) 末端半径(End Radius)
孔半径(Radius) 孔深(Depth)
25
MSC Adams 多体动力学仿真基础与实例解析
图标
名称 Boss Hollow
图 27 实体建模工具栏
几何实体建模的一般过程如下: (1)在实体建模工具栏中选取需要创建的三维实体建模工具。 (2)在参数设置栏中,选择创建新几何实体(New Part),还是添加到已有零部件上创建 几何实体(Add to Part),或者是在地面上创建几何实体(On Ground)。 (3)输入几何实体的尺寸参数,如长、宽、高、半径等。 (4)按照工作界面下方状态栏的提示信息,点选起始设计点,拖动鼠标至希望绘制的形 体尺寸,如果在参数设置栏中定义了具体的尺寸参数,则不随鼠标拖动变化。 (5)单击完成实体建模。 1.创建长方体 单击 Solids 工具栏中的 按钮,在模型树上方出现长方体属性栏,如图 28 所示。
CATIADMU实例教程-雨刮器运动仿真

CATIADMU实例教程-雨刮器运动仿真雨刮的运动模拟仿真一、基本原则:将雨刮器拆分成各个零件,然后调入同一个 product 文件里面,通过约束,使自由度为 0,即可使机构按照预定的设计进行运转。
二、将雨刮器分为以下几个部件:部件一、雨刮电机(包括输出轴,但不包括曲柄)★ 雨刮电机作为整个机构的固定部分,即作为固定基准,其他一些不动的固定管、电机安装板之类的也可以一起作为固定参考部分,见图1。
★ 在电机输出轴的位置分别做一条轴线,和一个参考面,见图 2。
图1图2 部件二、雨刮电机曲柄(包括与连杆连接的球头)---见图 3 ★ 曲柄作为雨刮电机的驱动源,他的旋转带动了整个机构的旋转。
★ 注意在曲柄与电机输出轴的部位同样建立一个轴线和一个平面,注意此轴线必须与电机的轴线同心,否则,无法建立约束。
两个球心轴线和平面图3★ 同时在与两个连杆连接的球头处,分别做出球头的球心点。
部件三、主侧连杆(包括与曲柄球头、摇臂球头连接的球碗)---见图 4★ 注意在各球碗处,建立球碗的球心点,此球心点必须与相应的球头球心同心或重回,否则无法建立约束。
注:在这种情况下,可以在建球头、球碗的球心时,采用同一个参考元素,这样建立的球心必定重回。
其他的如建立轴线时也可以采取这种方法。
★ 建立两球碗之间的联系。
球心和球心连线图4部件四、副侧连杆(包括与曲柄球头、摇臂球头连接的球碗)---方法和注意事项同主侧相同。
部件五、主侧摇臂(包括摇臂、球头、主刮臂、刮片)--图 5图5★ 摇臂的运动与刮平的运动是同步的,摇臂的运动角度,就是刮臂刮片的运动角度。
★ 注意在主摇臂与主衬套连接的部位做一个轴线和一个平面,因为摇臂与轴套之间是旋转的关系,与曲柄和电机轴之间的关系是一样的。
见图6. ★ 注意在与连杆连接的球头处建立球心,和球心到摇臂连接平面的垂线。
球心和轴线平面和轴线图6 部件六、副侧摇臂(包括摇臂、球头、主刮臂、刮片)----方法同主侧摇臂部件七、主侧衬套-----图7 ★在主侧衬套上,建立与主摇臂相对应的轴线和平面平面和轴线图7 部件八、副侧衬套----方法与主侧相同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.录制此教程纯属本人业余爱好,欢迎免费转载。
任何组织和个人未经许可,不得用于商业用途。
2. 在录制过程中假定大家已经对CATIA 这个软件有一定的认识。
故此,对于CATIA 三维建模系列模块涉及到的功能,就不再详细讲解。
3.由于达索系列软件博大精深,本人能力有限,难免出现错误。
若您发现错误,请告知与我,无比感激。
一.数字模型简介
二.数字模型浏览器模块
的几个常用功能
一.数字模型简介
Digital Mockup,译为数字化模型或者电子样机。
简称“DMU”。
DMU可以具备从产品设计、制造到产品维护整个生命周期所
需的多项功能。
如包含:装配关系、公差、干涉检查、工艺、材料、制造资源、人力资源、成本、安装拆卸、机构运动、截面扫描、人机互动等等。
其实产品的三维建模就是DMU最基本的一步。
接下来就从DMU运动仿真模块的基本内容开始,和大家共同
学习下CATIA的DMU运动仿真的内容。
二.数字模型浏览器模块的几个常用功能
1.1 英文界面
1.2 中文界面
DMU审查创建
DMU一般动画
2.1 轨迹工具条
轨迹对话框
记录器工具条
播放工具条
2.2 实体的轨迹生成
操作工具条。