机械1802沈思奇 物料控制系统
桥式抓斗卸船机振动给料控制系统节能降耗改造
桥式抓斗卸船机振动给料控制系统节能降耗改造摘要:卸船机振动给料系统作为重要的物料转接环节,如何实现更合理的控制,直接关系到生产效率和节能降耗工作,本论文重点介绍在PLC程序中对该设备控制的优化改造。
关键词:桥式卸船机振动给料系统S7-400PLC 技术改造节能降耗一、背景介绍我公司作为专业铁矿石码头,担负冀东及华北地区的大量铁矿石接卸作业。
公司一期目前建有两个25万吨级泊位,共6台由上海振华港机制造的桥式抓斗卸船机,单台设计卸船能力为2500t/h(四台)和2750t/h(两台),控制系统为西门子S7-400PLC系统。
由于本地区铁矿石需求量强劲,这六台卸船机的使用率和司机操作效率都达到国内的前列水平,单月作业量稳定在380万吨左右,最高达到500万吨。
在生产需求紧张的情况下,需要管理与维修设备方面做到结合实际,争先创优,提高效率,节能降耗。
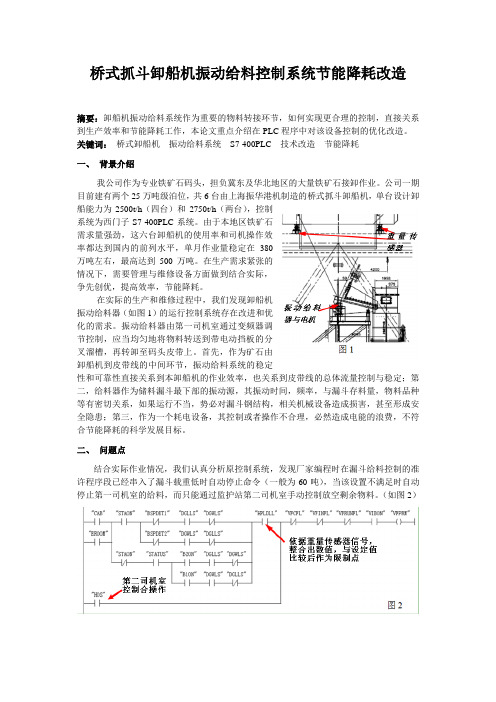
在实际的生产和维修过程中,我们发现卸船机振动给料器(如图1)的运行控制系统存在改进和优化的需求。
振动给料器由第一司机室通过变频器调节控制,应当均匀地将物料转送到带电动挡板的分叉溜槽,再转卸至码头皮带上。
首先,作为矿石由卸船机到皮带线的中间环节,振动给料系统的稳定性和可靠性直接关系到本卸船机的作业效率,也关系到皮带线的总体流量控制与稳定;第二,给料器作为储料漏斗最下部的振动源,其振动时间,频率,与漏斗存料量,物料品种等有密切关系,如果运行不当,势必对漏斗钢结构,相关机械设备造成损害,甚至形成安全隐患;第三,作为一个耗电设备,其控制或者操作不合理,必然造成电能的浪费,不符合节能降耗的科学发展目标。
二、问题点结合实际作业情况,我们认真分析原控制系统,发现厂家编程时在漏斗给料控制的准许程序段已经串入了漏斗载重低时自动停止命令(一般为60吨),当该设置不满足时自动停止第一司机室的给料,而只能通过监护站第二司机室手动控制放空剩余物料。
(如图2)但是,由于现场情况复杂,例如矿石密度、粘性大小,含水量高低,是否有积水杂物,低温漏斗结冰,卸船作业速度,更换不同物料等等。
一种基于工业机器人的铣床自动上下料控制系统

一种基于工业机器人的铣床自动上下料控制系统作者:李涛来源:《今日自动化》2021年第08期[摘要]為提高铣床上下料的效率,基于工业机器人设计了铣床自动上下料控制系统,提出了智能控制的铣床上下料自动控制系统的设计方法。
设计系统应用模块,采用ISA/EISA/微通道扩展总线加载铣床自动上下料控制指令,实验结果表明,设计的自动加载系统总体性能优越。
[关键词]工业机器人;铣床;自动;上下料;控制系统[中图分类号]TG659 [文献标志码]A [文章编号]2095–6487(2021)08–00–02[Abstract]In order to improve the efficiency of milling machine, this paper designed the automatic control system based on industrial robot and proposed the automatic control system with intelligent control. The system application module adopts the automatic loading and down control instruction and the automatic loading system is superior.[Keywords]industrial robot; milling machine; automatic; up and down; control system研究铣床自动上下料系统的远程自动控制方法,对于优化铣床自动上下料系统的设计,提高铣床自动上下料控制指令性能具有重要意义。
铣床自动上下料系统远程自动控制的核心在于铣床自动上下料系统机械部件的自动控制设计。
根据铣床自动上下料系统的激励和输出性能,进行参数自适应匹配,根据铣床自动上下料系统的激励特性,建立了铣床自动上下料系统,提高铣床上下料自动化系统的远程控制能力。
【机械毕业设计】全自动送料小车设计【含全套CAD图纸和WORD说明书】
本次设计方案的优点是:结构紧凑、负载能力大、平稳性好、传动误差小、转向灵活 并且控制简便。 关键词:全自动送料小车;蜗杆传动;单片机
II
徐 州 工 程 学 院 毕 业 设 计(论文 )
Abstract
Automatic Feed Vehicle integrates sound, light, electricity and the computer technology, and synthesizes advanced theory and the application technology in this world. It is applied widely in the flexible manufacturing system and the automated factory, and has the merits of high transportation efficiency, energy conservation, the operation reliable and the flexible transportation. It can enormously increase production automation levels and production efficiency.
基于ABB工业机器人的物料搬运控制系统
基于ABB工业机器人的物料搬运控制系统
沈灿钢
【期刊名称】《信息系统工程》
【年(卷),期】2024()1
【摘要】工业机器人大规模代替传统劳动力是大势所趋,本设计为PLC与工业机器人结合的一种物料搬运控制系统。
充分利用机电技术、机器人应用技术、PLC控制技术、组态网络技术、气动控制。
采用ABB机器人、三菱FR-D720S变频器、西门子PLC、物料检测传感器、夹取位置传感器、气动元件和触摸屏等构成全自动码垛搬运系统,这个系统可以对不同材质工件进行自动分拣和码垛。
实验结果表明系统能精准分拣金属工件和白色塑料工件,并在连续工作10个小时后,系统重复定位精度良好。
【总页数】4页(P12-15)
【作者】沈灿钢
【作者单位】江阴职业技术学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.基于工业机器人的药品包装线支架搬运控制系统设计
2.基于 Arduino的物料搬运控制系统设计
3.ABB工业机器人编程及应用研究--以物料搬运为例
4.基于PLC
与工业机器人控制的物料搬运及分拣系统的设计5.基于STM32的智能物料搬运控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
基于PLC的机械手自动上下料控制系统设计

智能 控制 技术 ・
王学 良
张秋 菊
基 于 P C的饥械 手 自动 上 下料控 制 系统设计 L
5 9
基 于 P C的 机械 手 自动 上 下料 控 制 系统 设计 L
王 学 良, 张秋 菊
( 南大 学 机械 工程 学 院 机械 电子 工程 系 , 江 江苏 无锡
242 ) 1 12
伺 服 系统 和精 确 的位 置传 感 器保 证 机 械 手 动 作 的快 速 与 准 确 定位 。 该 系统 的应 用 , 效 地 缩短 有
了齿轮 磨床 上 下料 时间 , 高 了生产 效 率和整 机 自动化 水 平 。 提 关 键词 : 齿机 ; 下料 系统 ; 磨 上 伺服 系统 ;L PC
21 02年 8月 中 国制 造业 信息化
第4卷 1
第 1 5期
l 机床砂轮 :一 工件安装 座 ;一上下料机械手 14 一 2 3 ;一防护门 ;一 甩油装置;一滑动导轨 ;一上下料机械手 2 8 5 6 7 ;一输送机 ;一气爪 9
图 1 总体方案示意 图
制器 , 是整个控制 系统 的核心 , 主要完成信号 的采 集 和处 理 、 服定 位 控 制 、 伺 自动 上 下 料 控 制及 甩 油
装 置控 制等 功能 。系 统输 入输 出信 息 见 表 1输 出 ,
信 号 主要包 括 4轴 伺 服 系统 的 脉 冲输 出 , 油 装 甩
点信号 , 各气动元件的到位信号以及伺服驱动器的 反馈 信号 等 , 些信 号对 于控 制系 统 的安 全性 和 可 这
靠性 至关 重要 。
机 械 平 】 F运动 机 械 予 l 转 运 动 州 机 械 平2L F运 动 机 械 手2 转 运 动 N
基于PIC单片机的粉料物料运输车自动卸料系统设计

Science &Technology Vision科技视界随着科技进步,机械自动化水平不断提高。
当前人力资源匮乏,企业被要求改善工作环境的背景下,对传统机械进行自动化改造势在必行。
本文的研究解决的问题就是为了减轻传统粉粒物料运输车在卸料过程中对人工操作的过分依赖。
同时实现自动卸料后可以减轻粉尘对操作工身体的伤害。
PIC 单片机具有较强的驱动电流,处理数据速度较快。
内部整合了多个模块,可以降低外围电路的开发难度。
1电路设计与驱动器模型根据卸料的步骤,在Proteus 里设计完成相应动作的硬件电路。
为减小电磁驱动器对PIC 单片机干扰,这里采用光电耦合元件PC827进行强弱信号隔离。
利用小信号放大管BC184与中功率放大管TIP31、TIP32构成H 桥直流电磁驱动电路[1],如图1。
图1H 桥直流电磁驱动器电路柳州运力双仓粉粒物料运输车的卸料流程图[2]为:图2粉粒物料运输车卸料流程图上图通过控制信号端口M3与M4,其组合有以下三种[3]:(1)M3:M4=01时的工作原理为:M3端口为低电平时Q13、Q10截止,Q15、Q9导通,电磁驱动器左端为高电平。
M4端口为高电平时Q11、Q16截止,Q12、Q14导通,电磁驱动器右端为低电平。
此时电磁驱动器推动阀门开启。
(2)M3:M4=10时电磁驱动器拉动阀门关闭。
(3)M3:M4=00或者11时电磁驱动器停止工作。
电磁驱动器利用线圈导电产生电磁力推动动铁芯进行阀门的开关,电磁驱动器模型[4]如图3。
图3电磁驱动器模型根据图2控制流程图,通过Proteus 设计的系统控制电路。
图中将AN2作为A/D 输入端口,共阳极LED 屏显示实时罐体的气压值,PIC 单片机通过光电耦合元件PC827与驱动电路隔离。
卸料系统电路如图4。
2PIC 单片机C 语言程序设计当前设置输入PIC 单片机A/D 端口的模拟电压为0~5V,罐体内最大气压为0.2MPa。
PLC自动配料称重系统

PLC自动配料称重系统
薛明君
【期刊名称】《电世界》
【年(卷),期】1997(038)001
【摘要】采用可编程序控制器(PLC)控制的饲料自动配料称重系统继电器控制线路简单、装调方便、控制灵敏、功能齐全及抗干扰能力强等优点,减少了故障,提高了生产效率。
实际应用于南阳县饲料厂,经一年多运行,取得了明显经济效益。
【总页数】2页(P10-11)
【作者】薛明君
【作者单位】河南中原机械工业学校
【正文语种】中文
【中图分类】TH715.15
【相关文献】
1.基于CDIO理念下自动配料称重系统模型平台设计 [J], 林凤钦
2.西门子SIWAREX FTA称重系统在全自动配料控制中的应用 [J], 张明;郭吉仁;李萌;亢涛
3.基于CDIO理念下自动配料称重系统模型平台设计 [J], 林凤钦
4.PLC配料称重系统的模糊自适应控制 [J], 刘文秀;郭伟
5.饲料生产自动配料称重系统的研究 [J], 王小阳
因版权原因,仅展示原文概要,查看原文内容请购买。
步进送料机机械课程设计

步进送料机机械课程设计一、课程目标知识目标:1. 学生能够理解步进送料机的基本工作原理和机械结构组成,掌握相关术语和概念。
2. 学生能够描述步进送料机在工业自动化中的应用及其重要性。
3. 学生能够解释步进送料机的关键参数,如步进速度、送料精度等,并理解它们对整体性能的影响。
技能目标:1. 学生能够运用CAD软件绘制步进送料机的简易结构图,展示其机械设计的基本要素。
2. 学生能够通过小组合作,设计并制作一个简易的步进送料机模型,展示其运动和送料功能。
3. 学生能够运用适当的工具和量具进行步进送料机模型的调试和性能评估。
情感态度价值观目标:1. 培养学生对机械设计和制造工艺的兴趣,激发创新意识和探索精神。
2. 培养学生的团队合作意识和沟通能力,认识到团队合作在工程项目中的重要性。
3. 增强学生对工业自动化领域的社会责任感,认识到技术发展对工业生产效率和生活质量的改善作用。
课程性质:本课程为实践性较强的机械设计课程,结合理论知识与动手操作,提高学生的综合应用能力。
学生特点:考虑到学生处于高年级,具备一定的机械基础知识,动手能力强,对实际应用有较高的兴趣。
教学要求:教学过程中应注重理论与实践相结合,鼓励学生主动探索,注重培养学生解决问题的能力和工程思维。
通过课程目标的达成,为学生后续的专业学习打下坚实基础。
二、教学内容1. 理论知识:- 步进送料机的工作原理及其在工业自动化中的应用。
- 步进送料机的结构组成,包括步进电机、传动系统、控制系统等。
- 步进送料机的关键参数及其对性能的影响,如步进速度、送料精度、负载能力等。
2. 实践操作:- 利用CAD软件进行步进送料机结构图的绘制。
- 步进送料机模型的材料选择、加工工艺及装配流程。
- 步进送料机模型的调试与性能评估,包括运动控制、送料精度检测等。
3. 教学大纲:- 第一周:步进送料机的基本概念、工作原理及应用场景介绍。
- 第二周:步进送料机结构组成及关键参数学习。
浅析工业机器人在自动化工程中的应用
第58卷收稿日期:2023-07-15;修订日期:2023-08-10作者简介:吴国健(1983—),男,从事折剪设备研发与应用。
E-m ai l :wu.guoj i an@j i nf 1概述某钣金自动化工程控制系统中,基于实际加工的需要,将整个控制系统分为主要三大块:第一块,通过M ES 系统监控设备状态、采集设备信息、订单管理、生产管理、质量统计、报表统计、展示看板及系统管理等,通过现场展示看板输出生产现场的实时动态画面,同时采集设备的相关信息以备份管理、下发生产任务操作(派工)等;第二块为工业机器人的软硬件部分,为确保整个控制系统可以稳定运行,需预防停电、停气状态下,钣金原材料的非正常落地,浅析工业机器人在自动化工程中的应用吴国健,王墨芊(江苏金方圆数控机床有限公司,江苏扬州225009)摘要:随着自动化技术的发展,现代机械设备的自动化控制水平也不断提升。
工业机器人及M ES 系统在电气控制系统中的应用,有助于进一步提升电气设备的自动化水平,使电气设备实现高效化、自动化、稳定化运行。
基于此,本文以某钣金自动化工程为例,对工业机器人在电气控制系统中的应用展开了分析和探讨,旨在进一步促进工业机器人的应用。
关键词:工业机器人;M ES ;电气控制系统;自动化中图分类号:TP242.2文献标识码:BD O I :10.16316/j .i s sn.1672-0121.2023.06.014文章编号:1672-0121(2023)06-0070-04第58卷第6期V ol .58No.6C H I N A M ETA LFO R M I N G EQ U I PM EN T &M A N U FA C TU R I N G TEC H N O LO G Y2023年12月D ec.2023A ppl i cat i on of aut onom ous col l aborat i ve robot i cs i n i nt el l i gent m anuf act uri ngD I N G X udong(D epar t m ent of A ut om at i on Engi neer i ng,N anj i ng V ocat i onal and Techni cal Col l ege ofM echani cal and El ect r i cal Engi neer i ng,N anj i ng,J i angs u,211306)A bs t ract :W i t h t he cont i nuous devel opm ent of i nt el l i gent t echnol ogy,i nt el l i gent m anuf act ur i ng has becom e an i m por t ant devel opm ent di r ect i on of m oder n m anuf act ur i ng i ndus t r y.A ut onom ous col l abor at i ve r obot i cs (PO V s )pl ay a key r ol e as an i m por t ant par t of s m ar t m anuf act ur i ng.A ut onom ous cobot s have f l exi bl e wor ki ng capa-bi l i t i es and i nt el l i gent deci s i on-m aki ng capabi l i t i es,and can achi eve ef f i ci ent col l abor at i on wi t h hum ans ,br i ngi ng gr eat changes and devel opm ent t o t he m anuf act ur i ng f i el d.Thi s paper expounds t he basi c pr i nci pl es and char act er i s t i cs of aut onom ous col l abor at i ve r obot t echnol ogy,anal yz es t he key t echnol ogi es of aut onom ous col l abor at i ve r obot s i n i nt el l i gent m anuf act ur i ng,i ncl udi ng per cept i on and r ecogni t i on t echnol ogy,deci -s i on-m aki ng and pl anni ng t echnol ogy,and t ask al l ocat i on and coor di nat i on t echnol ogy,and f ur t her expl or es t he appl i cat i on of aut onom ous col l abor at i ve r obot t echnol ogy i n t he f i el ds of i nt el l i gent as s em bl y and pr oces s-i ng,i nt el l i gent l ogi s t i cs and war ehous i ng,and i nt el l i gent det ect i on and qual i t y cont r ol i n i nt el l i gent m anuf ac-t ur i ng.K ey w ords :R obot s ;A ut onom ous col l abor at i on;I nt el l i gent m anuf act ur i ng;Per cept i on and r ecogni t i on;D eci -s i on-m aki ng and pl anni ng[3]许郢.虚拟仿真技术在工业机器人智能制造中的应用[J ].电气传动自动化,2023,45(4):50-53.[4]于鹏飞,罗素保.工业机器人在智能制造中的应用[J ].现代制造技术与装备,2023,59(4):168-170.[5]赵江天.工业机器人技术在智能制造中的应用及发展研究[J].自动化应用,2023,64(7):16-18.第6期图1设备布置图造成碰坏刮伤或财产损失;第三块为钣金加工设备执行工件加工工作,主要设备是一台激光切割机、一台四边折弯中心和一台数控折弯机。
振动给料机控制系统设计

指导教师签名:时间:
4(64):64-70.
[9].陈婵娟,薛恺.基于PLC的步进电动机单双轴运动控制的实现.机械设计与制造. 2009(3).
[10]He yong yi. A Control System of Material Handling in FMS. Journal of shanghai university.
初步设计总体方案,写开题报告
2015.3.23—3.28
完成初步开题报告
分析方案可行性,修改完善并形成最终总体方案
2015.3.29—4.4
得到最终方案
查找外文文献
2015.4.5—4.7
选定外文文献
翻译外文文献
2015.4.8—4.13
翻译外文文献
参数计算和元件选择并绘制草图
2015.4.14—4.24
[6].王海,李洪奎,刘晓.基于PLC的多轴控制研究[J].机械工程学报, 2008, 6(4): 470-472.
[7].杨东,黄永红,张新华,吉敬华.用PLC基本指令实现自动运动定位控制的研究[J].微
计算机信息, 2010, 26(2-1): 62-64.
[8].张强,文怀兴,陈婵娟.数字量I/O卡在快速成型机多轴控制中的应用[J].控制与检测, 2008,
(3)操作简单。单片机控制系统一般都作为现场控制设备在线运行,作为人机接口的操作面板应设计得布局合理,标识清楚而准确,易于现场操作人员掌握和使用。
(4)维护简单。在系统的软件设计中,应设置自诊断程序,该程序能够自动判断程序和数据的完整性,在检查I/O通道的工作状态是否正常。
机电传动课程设计指导书2013

《机电传动控制》课程设计指导书陈白宁编写沈阳理工大学机械工程学院2013.11目录第一章概述第二章设计步骤和方法第三章设计说明书内容要求及时间安排第四章《机电传动控制课程设计》题目及控制要求第五章设计说明书参考目录第一章概述1、目的本课程设计的教学目标是使学生掌握机电传动控制系统的基本原理、PLC 控制电路的设计方法以及继电器接触器控制电路的PLC改造方法。
2、基本要求1)掌握机电传动控制系统中PLC控制的基本原理、顺序控制设计方法2)具备一定的设计能力和调试能力第二章设计步骤和方法1、任务分析及方案确定根据控制要求进行如下工作:1)任务分析,然后确定主电路,注意考虑设备的保护;2)确定控制规则;3)选择PLC,包括PLC点数、类型及扩展模块的类型,注意操作方式及控制电路的保护;4)PLC输入输出点的确定及分配等。
2、电路图的确定1)画出主电路原理图;2)画出PLC原理或接线图。
3)画出顺序功能图3、控制软件的设计及调试根据控制规则进行如下工作:1)画出顺序功能图;2)设计PLC控制梯形图;3)程序调试说明。
第三章设计说明书内容要求及时间安排1、设计说明书内容及书写格式要求1)设计题目;2)控制要求;3)任务分析、方案确定。
包括PLC输入和输出点的确定。
PLC的选择,控制规则,操作方式及设计思想等;4)画出主电路原理图;5)画出PLC接线图;6)画出顺序功能图;7)设计PLC控制梯形图;8)电器元件选择。
2、时间安排1)理解题目要求,查阅资料,确定设计方案1天2)电路及PLC梯形图设计与绘图 3.5天3)PLC梯形图调试0.5天4)电气元件选择与说明书撰写1天5)答辩1天第四章《机电传动控制课程设计》题目及控制要求第一组题目:卷烟厂风力送丝设备控制系统设计⏹工作过程及要求:⏹ 1.启动后,风机工作,给烟丝管道送风⏹ 2.当落料器内料低于下落料器时,启动回风电磁阀打开风门,将烟丝吸进落料器;当落料器内料高于上落料器时,回风电磁阀关闭风门。
基于DSP28016的计量泵流量控制的实现

T=1 3 3X 0 = . 1 s 0 ×1. 1 一 0 033
() 1
() 2
心处将有一个霍尔信号被捕获。假设偏心轮是逆时针旋转 的, 那么当有霍尔信号被捕获的同时, 活塞杆将开始做抽液运
动 , 过半 圈之后 , 在转 活塞杆 改做 排液运动。然后再 次接 收到
作者简介: 陆轶, 上海大学全 日制硕士在读。
收稿 日期 : 0 0—1  ̄ 9—1 2 0
・
21 ・
如图 2所示对 于
时钟 同步 的。如果 D P81 S 2 6的频率 是 6 H , 么计 数器 0 0M z那
偏心轮 , 们在 它 最 我 大偏 心 距 处 装 上 一 个磁 铁 , 霍尔 元 件 将
关系如 图 4 通过图 4可以得出 , , 流量的排放量与上位机所给
通 过 对 E a l es C IT i E T 的 设 置 C p R g.E E N .bt .C V 4
这样步进电机每转两周, 偏心轮转一圈, 系统实现一次的抽放
工作。电机为两相整步工作 , 其步距角为 18, .。选用 S 76 A L 02
作 为步进 电机驱动 芯片 , 过驱动芯 片可 以实现十六 细分。 通 通过 D P 8 1 , S 206 可以对步进 电机 的转速进行 控制。从 而实 现
CEVTI CEV 他
CP i A xn p
m r一 o,
厂_ _]
r _1
厂—]
.
FFF上 ! FFF FF
{ Ii , / 1 i 土— i ; —一寸 一 !
—
—
OD
适合于中小企业的生产调度系统

适合于中小企业的生产调度系统
白国振
【期刊名称】《组合机床与自动化加工技术》
【年(卷),期】2002(000)009
【摘要】以上海理工大学附属工厂生产调度的实际情况为背景,介绍了一种适合于中小企业的车间生产调度系统的设计思想、组成模块及功能.
【总页数】3页(P11-12,14)
【作者】白国振
【作者单位】上海理工大学,机械工程学院,上海,200093
【正文语种】中文
【中图分类】TP39
【相关文献】
1.适合于中小企业的生产计划管理系统 [J], 白国振
2.一种适合于中小企业的ERP系统 [J], 孙金国;陈淑敏
3.谈适合于中小企业的商务网络平台 [J], 吴波
4.谈适合于中小企业的商务网络平台 [J], 吴波
5.适合于中小企业的全球信息网络工程概况 [J], 冷伏海
因版权原因,仅展示原文概要,查看原文内容请购买。
CAD专家系统的一种模式
CAD专家系统的一种模式
郝博;胡玉兰
【期刊名称】《沈阳理工大学学报》
【年(卷),期】1995(0)4
【摘要】通过总结专家进行工程设计的设计方式,分析人工智能解决问题的方法,从理论上提出了CAD专家系统的一种模式。
应用这种模式,构造了二个专家系统——简单冲栽模设计系统、复合冲裁模设计系统,对这两个系统的功能、原理及
结构等作了简单的介绍。
【总页数】6页(P7-12)
【作者】郝博;胡玉兰
【作者单位】[1]沈阳工业学院机械设计系;[2]沈阳工业学院自动控制系
【正文语种】中文
【中图分类】TP391.72
【相关文献】
1.一种电机智能CAD神经网络专家系统 [J], 刘振凯
2.专家系统中的一种自适应自学习模式及算法 [J], 应启瑞;杜长征;王永庆;陈莹
3.一种基于事例推理的数据库模式设计专家系统的体系结构 [J], 许志端;杨兰蓉;张金隆
4.一种以模式识别为基础的专家系统——液体火箭发动机故障诊断样机 [J], 王宏让;谭永华
5.CADCS专家系统的一种新结构及实现 [J], 袁曾任;吴兵
因版权原因,仅展示原文概要,查看原文内容请购买。
基于STM32F4嵌入式的剑杆织机控制系统设计

基于STM32F4嵌入式的剑杆织机控制系统设计叶太强;何勇;沈小其;梁艺荧【摘要】针对目前国产高端剑杆织机控制系统研发成本高,可靠性差,市场竞争力低等问题,设计了一种基于STM32F4系列控制器的双核架构嵌入式剑杆织机控制系统.依据剑杆织机织造工艺原理,结合模块化思想,将系统整体硬件框架划分为5个子系统,并分别对其进行原理图设计和抗干扰性设计;软件上采用基于FreeRTOS的嵌入式实时操作系统,提高了控制系统的实时性与织造效率.整个控制系统具有成本低,实时性好,可靠性高等优点.测试结果表明:在织机转速为600 r/min时,系统运行稳定,为国产高端剑杆织机的设计研发提供了一个可行方案.【期刊名称】《自动化与仪表》【年(卷),期】2019(034)003【总页数】5页(P9-13)【关键词】控制系统;剑杆织机;双核架构;模块化;抗干扰性;嵌入式系统【作者】叶太强;何勇;沈小其;梁艺荧【作者单位】东华大学机械工程学院,上海201620;东华大学机械工程学院,上海201620;东华大学机械工程学院,上海201620;东华大学机械工程学院,上海201620【正文语种】中文【中图分类】TP273;TS103.7剑杆织机属于无梭织机[1],具有功能完善、产品适应范围广、织物质量优量、生产率高等优点,对纺织行业的发展有着举足轻重的作用[2]。
目前,意大利、德国、日本产剑杆织机处于领先地位,我国则主要生产并出口中低端剑杆织机,国产少部分高端机型在控制精确性、可靠性与稳定性方面,与国外相比仍差距明显[3]。
因此,研发高性能的剑杆织机是国产剑杆织机行业研发的重点[4]。
控制系统是高性能剑杆织机的核心。
通常情况下,用于工业控制的控制器有PLC、工控机和单片机[5]。
PLC 和工控机可靠性高,属于在单片机基础上针对工业环境的二次开发,成本较高;单片机控制系统,内核小,专用性强,具备系统实时性高、开发难度简单等优点,因此在工业中得到广泛使用[6-7]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能制造基础课程设计说明书物料
控制系统的设计
学院:机械工程学院
专业:机械制造与自动化
班级:机械1802
姓名:沈思奇
学号:180101230
指导老师:孙娟
课程设计书
扬州市职业大学机械工程学院
沈思奇
2020年5月
目录
课程设计任务六物料控制系统
✧课程设计目的: ....................................................................................................
✧课程设计器材: ....................................................................................................
✧课程设计要求: ....................................................................................................
✧I/O对照分配表: ..................................................................................................
✧操作步骤: ............................................................................................................
✧程序设计: ............................................................................................................
✧课程设计:............................................................................................
✧ 参考文献:............................................................................................
课程设计物料控制系统
课程设计目的:
①掌握西门子S7-200 Smart PLC原理
②掌握创建S7-200 SMART 控制程序的步骤
③熟悉S7-200 SMART 控制指令的使用方法
④掌握物流输送设备的启停要领
⑤了解气缸、电磁阀的工作原理
⑥掌握手操盒的操作
⑦通过实际控制系统的建立,掌握应用PLC技术解决实际控制问题的思想和
方法
课程设计器材:
①计算机
②实验控制台
③S7-200 smart PLC
④手操盒
⑤物料控制系统LED矩阵功能卡片
程设计要求:
➢物料控制的构造,如图7-1所示:
图7-1 物料加工的构造
➢控制要求:
(一)这是一个常见的工业自动化物流的实例,它可以向学生介绍以下几个概念:
a.在需要进行分组操作时,首先需要将物料之间的距离进行分离,常用的方法
是采用一段差速辊道,前面的辊道速度低,后面的辊道速度快,这样在经过这段输送线时,物料就自动被拉伸了距离。
b.通过传感器我们可以对物料进行分拣,可以通过对物料的大小、形状、颜色、
重量、条形码等等特征进行分拣。
c.在电磁阀的作用下通过气缸将物料进行分拣。
(二)自动化物流系统的控制方法
a.设备启动初始化,要求对设备进行初始化的处理,其中包括所有气缸复位,
气缸活塞的原点感应传感器(DI1.0、DI1.2、DI1.4)必须是“1”。
前点传感器(DI1.1、DI1.3、DI1.5)必须是“0”。
b.当设备初始化完成后,启停设备按照从后向前的顺序依次延时启动输送线,
从前向后的顺序停止输送线。
这样不会造成线上物料的堆积、挤压。
c.触发红色物料判别传感器(DI0.5)是“1”,表示有红色物料输送到红色物料
分拣区,自动启动电磁阀DQ0.5,此时相应的气缸应该动作,缸杆向前推出,将红色物料推入红色积放区,此时传感器也相应动作,首先原点传感器DI1.0OFF,然后前点传感器DI1.1ON,表示气缸已经到达前点,红色物料已经完成推出动作,电磁阀DQ0.5OFF,相应前点传感器DI1.1OFF,然后原点传感器DI1.0ON,表示整个红色物料推出动作完成。
d.其他颜色判别动作方法同红色物料,动作步骤与之相似。
e.故障判别与处理:
f.当电磁阀处于OFF状态,气缸的原点传感器没有信号。
g.气缸的原点和前点传感器同时有信号。
h.电磁阀动作后,相当长的时间内,仍没有相应的传感器信号产生。
I/O对照分配表:
表7-1 I/O对照分配表
操作步骤:
①建立STEP7 Micro/Win Smart 软件和S7-200 SMART PLC 的以太网通讯
②配置CPU 和扩展模块
③在符号表中为变量命名
④编写控制程序
⑤下载项目并调试其功能
程序设计
一.控制流程图:
二.梯形图
课程设计心得
制造业的是一个国家工业化水平的决定性因素。
以信息物理生产系统为核心的第四次工业革命正在引领新一波的制造系统变革。
通过本次实习我们了解到了物料控制是一个企业的心脏使我能够从理论高度上升到实践高度,更好的实现理论和实践的结合,为我以后的工作和学习奠定初步的基础。
可以使我们通过实习获得基本生产的感性知识,理论联系实际,扩大知识面;同时毕业实习又是锻炼和培养学生业务能力及素质的重要渠道,使我能够亲身感受到由一个学生转变到一个职业人的过程。
逐步实现由学生到社会的转变。
培养当代大学生具有吃苦耐劳的精神,也是学生接触社会、了解产业状况、了解国情的一个重要途径,培养我们初步担任技术工作的能力、初步了解企业管理的基本方法和技能;体验企业工作的内容和方法。
这些实际知识,对我们以后的工作,奠定十分必要的基础。
参考文献
1.南丽霞.机床电气控制与PLC(三菱)
2.郝新妮.智能制造
3.廖常初S7-200 SMART PLC 编程及应用第三版。