【CN110083087A】一种基于STM32的电动货架系统【专利】
一种基于物联网的仓库存放货架[发明专利]
![一种基于物联网的仓库存放货架[发明专利]](https://img.taocdn.com/s3/m/39e423a6767f5acfa0c7cddf.png)
专利名称:一种基于物联网的仓库存放货架专利类型:发明专利
发明人:余旭,何振汉
申请号:CN202010830510.7
申请日:20200818
公开号:CN111908000A
公开日:
20201110
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于物联网的仓库存放货架,包括货架本体,货架本体的底部固定连接有底座,底座的一侧设有移动机构,货架本体靠近移动机构的一侧等距设有若干个升降机构,移动机构包括一号滑道,一号滑道的顶部开凿设有一号滑槽,移动机构通过螺纹杆带动滑块移动,带动装载有货物的放置板进行横向移动,将货物送至对应的货架底部;设置的升降机构通过电动伸缩杆插入货物放置板的限位环中,通过控制二号滑块的升降将货物放置板抬升,达到对应的货架夹层中;货架本体内部与货物放置板上的由电动伸缩杆推动的推板能够对货物进行推送,可将货物进行存取,通过机械代替传统的人工搬运,降低管理员的工作强度,且能够快速存取货物,提高工作效率。
申请人:武汉亿维登科技发展有限公司
地址:430074 湖北省武汉市东湖新技术开发区光谷大道35号银久科技产业园二期第03幢3层1号房43部位
国籍:CN
代理机构:武汉维创品智专利代理事务所(特殊普通合伙)
代理人:余丽霞
更多信息请下载全文后查看。
基于STM32的智能晾衣架控制系统设计
基于STM32的智能晾衣架控制系统设计一、引言随着科技的进步和人们生活水平的提高,越来越多的家庭使用智能家居设备来提升生活质量。
其中,智能晾衣架作为一种智能家居设备,正逐渐走进人们的生活。
本文旨在设计基于STM32的智能晾衣架控制系统,实现晾衣架的智能化控制,提升用户的使用体验。
二、系统设计1. 硬件设计智能晾衣架控制系统的硬件设计基于STM32微控制器,使用光电传感器进行测距及晾衣架展开状态的检测,利用电机进行晾衣架的升降。
硬件电路中还包括电源模块、显示屏模块和按键模块,以满足系统的电源供应、信息显示和操作调整的需求。
2. 软件设计软件设计主要包括控制算法的编写和界面设计两个方面。
控制算法的编写涉及晾衣架的升降控制和状态监测。
通过光电传感器监测晾衣架展开状态,当晾衣架达到一定高度时,控制系统停止升降电机的工作,保证晾衣架在合适的高度停止。
同时,通过PID算法对升降电机进行控制,实现晾衣架升降过程的平稳、精确控制。
界面设计通过显示屏模块和按键模块完成。
显示屏模块将晾衣架的状态信息以图形化的方式展示给用户,包括晾衣架的高度、剩余时间等。
按键模块用于用户的操作调整,包括开始升降、停止升降和调整晾衣架高度等功能。
三、系统实现在硬件设计完成后,需要进行软件的调试和系统的集成。
在系统调试中,需要对控制算法进行优化,确保升降过程的平稳和准确度。
同时,也需要进行软件界面的调整和用户使用体验的优化。
四、系统测试系统测试主要分为功能测试和性能测试两个方面。
功能测试主要验证系统的基本工作功能是否正常,包括晾衣架的升降控制、状态监测、显示和按键操作的功能是否正常等。
性能测试主要验证系统的运行性能是否满足需求,包括晾衣架升降过程的平稳度、精确度等。
五、总结与展望本文设计并实现了基于STM32的智能晾衣架控制系统,通过对硬件和软件的设计,实现了晾衣架的智能化控制。
通过功能和性能测试,验证了系统的可行性和有效性。
然而,该系统还存在一些不足之处,如对潮湿度的检测和控制尚未实现,对室内温湿度的变化对晾衣架升降的影响尚未思量等。
一种自动化货架[发明专利]
![一种自动化货架[发明专利]](https://img.taocdn.com/s3/m/b8aa716e680203d8cf2f2430.png)
专利名称:一种自动化货架
专利类型:发明专利
发明人:刘少辉,金盼来,朱洪平,薛菲,何勇,周超杰申请号:CN201911208367.1
申请日:20191201
公开号:CN111003395A
公开日:
20200414
专利内容由知识产权出版社提供
摘要:本发明公开了一种自动化货架,包括货架主体、升降装置、放置槽、上滑槽、下滑槽、滑块,所述货架主体包括所述货架板和所述货架侧板,所述升降装置包括所述上轴承滑板、所述下轴承滑板、所述滚动螺母、所述支撑板、所述滚珠丝杠、所述导向光杆、所述旋转电机、所述固定螺母、所述同步带轮、所述同步带,本发明有益效果是,当工作人员不方便拿取在较高处的货物时,无需去搬运梯子,可通过本发明的升降装置和夹紧装置的配合可直接拿取相应高度货物,节省工作时间,提高效率,无用后可将升降装置与夹紧装置隐藏至货架内,节省空间,实用性高。
申请人:慈溪太平鸟物流有限公司
地址:315000 浙江省宁波市慈溪滨海经济开发区慈东南大道56号
国籍:CN
更多信息请下载全文后查看。
基于STM32的智能晾衣架控制系统设计

基于STM32的智能晾衣架控制系统设计基于STM32的智能晾衣架控制系统设计摘要:随着科技的不断发展,智能家居成为了人们生活中的一部分。
智能晾衣架作为智能家居的一种应用,能够为家庭生活带来便利和舒适。
本文主要介绍了一种基于STM32的智能晾衣架控制系统设计。
该系统由硬件和软件两部分构成,硬件部分包括传感器、驱动电路和继电器等模块,软件部分主要通过编写嵌入式程序实现对晾衣架运行状态的监控和控制。
通过对系统的设计与实现,证明了该控制系统的可行性和有效性。
1. 引言传统的晾衣架需要人工操作,不仅麻烦而且效率低下。
随着生活水平的提高和科技的进步,人们对于晾衣架的需求也在不断提高。
智能晾衣架可以实现定时、定量的晾衣功能,使人们的生活更加便利和舒适。
因此,设计一种基于STM32的智能晾衣架控制系统,具有较高的实用价值和市场潜力。
2. 系统设计2.1 系统硬件该系统的硬件部分主要由STM32单片机、温湿度传感器、红外传感器、电机驱动电路和继电器等组成。
其中,STM32单片机作为核心控制器,负责处理和控制晾衣架的运行状态;温湿度传感器用于检测周围环境的温度和湿度;红外传感器用于检测晾衣架上是否有衣物;电机驱动电路用于控制电机的正反转,实现晾衣架的上升和下降;继电器用于控制晾衣架的加热功能。
2.2 系统软件系统软件部分主要包括嵌入式程序和用户界面。
嵌入式程序通过编写C语言代码实现对传感器和电机的控制,具体包括晾衣架上升、下降、停止、加热等功能的实现;用户界面通过LCD显示屏和按键实现人机交互,用户可以通过按键设置晾衣架的工作模式和时间等参数。
3. 系统实现系统的实现主要包括硬件的电路设计和软件的编程实现。
硬件电路设计要考虑到电路的稳定性和可靠性,保证各个模块之间的正常工作。
软件编程要根据硬件设计的要求实现控制逻辑和功能,通过编写测试程序进行调试和验证。
4. 实验结果与分析实验结果表明,该控制系统能够实现晾衣架的稳定运行和智能控制。
一种基于STM32的电动货架系统[发明专利]
![一种基于STM32的电动货架系统[发明专利]](https://img.taocdn.com/s3/m/98f5b9e503d8ce2f01662366.png)
专利名称:一种基于STM32的电动货架系统
专利类型:发明专利
发明人:郭进,何俊杰,王超尘,邹卫军,杨毅,白云耀申请号:CN201910230610.3
申请日:20190326
公开号:CN110083087A
公开日:
20190802
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于STM32的电动货架系统,包括电源模块、控制单元、通信单元、隔离单元和驱动单元,电源模块连接控制单元、通信单元和驱动单元,用于给各个单元供电;控制单元连接隔离单元和通信单元,用于执行逻辑代码和处理数据,包括STM32芯片、最小系统模块和指示模块。
本发明采用模块化方法设计,充分利用了STM32芯片上丰富的外设资源,这样既能够保证每个模块的独立性,又能够实现各部分的互相联系,且数据处理速度较快;本发明由于采用模块化的设计思想,使得各模块的接口变得十分简单,同时方便了软件编程以及货架系统后期升级维修;且本系统使用STM32芯片降低系统成本,提高系统的灵活性和通用性,适用于电动货架系统。
申请人:南京理工大学
地址:210094 江苏省南京市玄武区孝陵卫200号
国籍:CN
代理机构:南京苏创专利代理事务所(普通合伙)
代理人:张学彪
更多信息请下载全文后查看。
一种基于STM32的家居智能安防系统[实用新型专利]
![一种基于STM32的家居智能安防系统[实用新型专利]](https://img.taocdn.com/s3/m/75e5f4e7c0c708a1284ac850ad02de80d4d806e5.png)
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920068022.X(22)申请日 2019.01.14(73)专利权人 天津科技大学地址 300222 天津市河西区大沽南路1038号电子信息与自动化学院lijish@(72)发明人 李继生 胡孟林 杨超 龚美玲 冯国祥 (51)Int.Cl.G08B 13/08(2006.01)G08B 13/19(2006.01)G08B 17/10(2006.01)G08B 21/16(2006.01)H04M 1/725(2006.01)G08C 17/02(2006.01)(54)实用新型名称一种基于STM32的家居智能安防系统(57)摘要本实用新型专利是一种基于STM32的家居智能安防系统,具体说是应用于当住户无人在家时可以通过手机实时检测家里财产安全的智能安防系统。
针对现有人防的不足设计了一种能应用于每户住户的智能检测系统,包括以手机为主的移动终端,以RFP -601压力传感器为主的门锁反锁检测模块用以检测房门是否反锁,以RD -624人体红外热释电传感器为核心的防盗模块,用以检测是否有人进入,以Risym火焰传感器为核心的防火模块,可以实现对屋内明火的检测;以MQ -5可燃气体传感器为核心的防煤气泄漏模块,可以检测屋内煤气是否泄漏,以STM32 F103VET6芯片为核心构成的最小系统,外加无线通信模块,可以实现实时在线检测以及远程收发数据等功能。
符合家居检测的要求,具有便携、智能的特点,同时设计简单使用方便。
权利要求书1页 说明书2页 附图2页CN 209343479 U 2019.09.03C N 209343479U1.一种基于STM32的家居智能安防系统,其特征是:包括移动终端、门锁反锁检测模块、防盗模块、防火模块、防煤气泄漏模块、主控制器、无线通信模块;所述移动终端是用户的手机;所述门锁反锁检测模块是由RFP -601压力传感器和与其相对应的电阻电压转换电路组成,以此来实现在线检测房门是否反锁;所述的防盗模块是通过RD -624人体红外热释电传感器来检测屋内是否有人进入;所述的防火模块是通过Risym火焰传感器来检测屋内是否有明火;所述的防煤气泄漏模块是通过MQ -5可燃气体传感器来检测当没人在屋内时,屋内是否有煤气泄漏;所述主控制器由STM32 F103VET6芯片构成的最小系统,通过I/O接口和外围电路的连接来完成系统控制和数据处理的功能;所述无线通信模块可以远程收发数据显示在手机上。
基于STM32_的自动分拣式仓储物流机器人设计
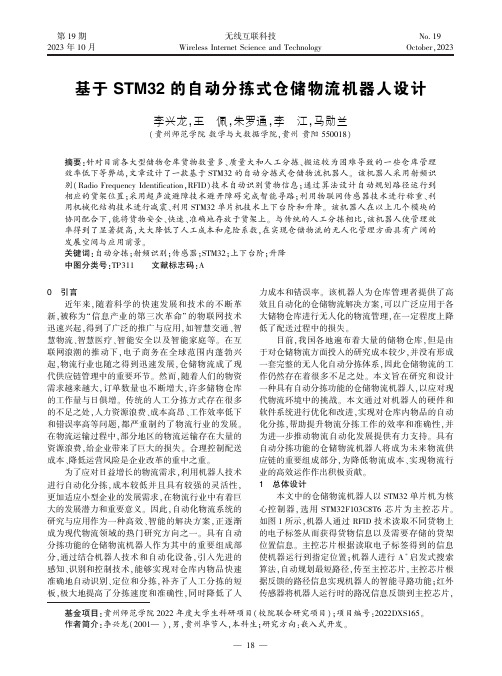
第19期2023年10月无线互联科技Wireless Internet Science and TechnologyNo.19October,2023基金项目:贵州师范学院2022年度大学生科研项目(校院联合研究项目);项目编号:2022DXS165㊂作者简介:李兴龙(2001 ),男,贵州毕节人,本科生;研究方向:嵌入式开发㊂基于STM32的自动分拣式仓储物流机器人设计李兴龙,王㊀佩,朱罗通,李㊀江,马勋兰(贵州师范学院数学与大数据学院,贵州贵阳550018)摘要:针对目前各大型储物仓库货物数量多㊁质量大和人工分拣㊁搬运较为困难导致的一些仓库管理效率低下等弊端,文章设计了一款基于STM32的自动分拣式仓储物流机器人㊂该机器人采用射频识别(Radio Frequency Identification ,RFID )技术自动识别货物信息;通过算法设计自动规划路径运行到相应的货架位置;采用超声波避障技术避开障碍完成智能寻路;利用物联网传感器技术进行称重㊁利用机械化结构技术进行减震㊁利用STM32单片机技术上下台阶和升降㊂该机器人在以上几个模块的协同配合下,能将货物安全㊁快速㊁准确地存放于货架上㊂与传统的人工分拣相比,该机器人使管理效率得到了显著提高,大大降低了人工成本和危险系数,在实现仓储物流的无人化管理方面具有广阔的发展空间与应用前景㊂关键词:自动分拣;射频识别;传感器;STM32;上下台阶;升降中图分类号:TP311㊀㊀文献标志码:A0㊀引言㊀㊀近年来,随着科学的快速发展和技术的不断革新,被称为 信息产业的第三次革命 的物联网技术迅速兴起,得到了广泛的推广与应用,如智慧交通㊁智慧物流㊁智慧医疗㊁智能安全以及智能家庭等㊂在互联网浪潮的推动下,电子商务在全球范围内蓬勃兴起,物流行业也随之得到迅速发展,仓储物流成了现代供应链管理中的重要环节㊂然而,随着人们的物资需求越来越大,订单数量也不断增大,许多储物仓库的工作量与日俱增㊂传统的人工分拣方式存在很多的不足之处,人力资源浪费㊁成本高昂㊁工作效率低下和错误率高等问题,都严重制约了物流行业的发展㊂在物流运输过程中,部分地区的物流运输存在大量的资源浪费,给企业带来了巨大的损失㊂合理控制配送成本㊁降低运营风险是企业改革的重中之重㊂为了应对日益增长的物流需求,利用机器人技术进行自动化分拣,成本较低并且具有较强的灵活性,更加适应小型企业的发展需求,在物流行业中有着巨大的发展潜力和重要意义㊂因此,自动化物流系统的研究与应用作为一种高效㊁智能的解决方案,正逐渐成为现代物流领域的热门研究方向之一㊂具有自动分拣功能的仓储物流机器人作为其中的重要组成部分,通过结合机器人技术和自动化设备,引入先进的感知㊁识别和控制技术,能够实现对仓库内物品快速准确地自动识别㊁定位和分拣,补齐了人工分拣的短板,极大地提高了分拣速度和准确性,同时降低了人力成本和错误率㊂该机器人为仓库管理者提供了高效且自动化的仓储物流解决方案,可以广泛应用于各大储物仓库进行无人化的物流管理,在一定程度上降低了配送过程中的损失㊂目前,我国各地遍布着大量的储物仓库,但是由于对仓储物流方面投入的研究成本较少,并没有形成一套完整的无人化自动分拣体系,因此仓储物流的工作仍然存在着很多不足之处㊂本文旨在研究和设计一种具有自动分拣功能的仓储物流机器人,以应对现代物流环境中的挑战㊂本文通过对机器人的硬件和软件系统进行优化和改进,实现对仓库内物品的自动化分拣,帮助提升物流分拣工作的效率和准确性,并为进一步推动物流自动化发展提供有力支持㊂具有自动分拣功能的仓储物流机器人将成为未来物流供应链的重要组成部分,为降低物流成本㊁实现物流行业的高效运作作出积极贡献㊂1㊀总体设计㊀㊀本文中的仓储物流机器人以STM32单片机为核心控制器,选用STM32F103C8T6芯片为主控芯片㊂如图1所示,机器人通过RFID 技术读取不同货物上的电子标签从而获得货物信息以及需要存储的货架位置信息㊂主控芯片根据读取电子标签得到的信息使机器运行到指定位置;机器人进行A ∗启发式搜索算法,自动规划最短路径,传至主控芯片,主控芯片根据反馈的路径信息实现机器人的智能寻路功能;红外传感器将机器人运行时的路况信息反馈到主控芯片,主控芯片根据反馈信息控制机体上下台阶;称重传感器会称量载物托盘上的货物质量;核心控制器根据货物的质量大小将它们分区域存储在货架的不同位置㊂图1㊀仓储物流机器人总体设计2 系统设计㊀㊀该系统主要是由核心控制芯片㊁射频识别模块㊁智能循迹模块㊁称重及减震模块㊁升降及上下台阶模块等几个部分组成㊂2.1㊀核心控制芯片㊀㊀集成电路将电路中许多元器件集中制作在一块半导体晶片上,大大压缩了电子线路的体积,在各行各业中都有着极其重要的作用㊂本文所用到的STM32系列的单片机本质上也是一个集成电路,在人们的日常生活中被广泛应用,该系列单片机功能强大,稳定性好,而且还能调用自身官方提供的具有强大功能的库文件,简化了程序的编写,相对于其他单片机而言价格较低,十分适合入门学习㊂本文采用STM32F103C8T6作为仓储物流机器人的核心控制芯片㊂该芯片是一款由STMicroelectronics公司生产的32位ARM Cortex-M3内核的微控制器芯片,具有丰富的外设和强大的处理能力,适用于各种嵌入式应用㊂运行频率高达72MHz,具有高性能和低功耗的特点,能够满足复杂的应用需求㊂此外,该款芯片还内置了多个外设,包括多个通用定时器㊁串口㊁SPI㊁I2C㊁ADC等,可以满足各种应用的需求㊂在本文的研究中,STM32F103C8T6作为核心控制芯片,可以通过I/O口与其他模块进行通信,将各个模块及其传感器反馈的信息与主控制程序完成交互,进行数据的传输与处理,从而操控所有模块进行工作,实现本文所述的各项功能㊂2.2㊀RFID模块㊀㊀识别技术作为信息采集的重要技术已经被广泛应用于各行各业,比较常见的有饭卡㊁门禁卡㊁公交卡㊁身份证等的识别,商场里零售数据的实时统计以及快递物流中货物的自动定位等㊂识别技术的出现帮助人们快速完成信息交互,使人们的生活更加便捷㊂本文设计的物流机器人就是利用RFID技术来实现货物信息识别功能的㊂本文选用的RFID-RC522模块采用MFRC522芯片,可以通过无线射频的方式进行非接触式的双向数据通信㊂此外,它还可以利用无线射频对货物上的电子标签进行读写,从而识别货物信息并进行数据交换㊂射频识别速度极快,并且可以同时对多个目标进行识别,极大地提高了工作效率㊂物流机器人通过RFID读取器自动识别电子标签后获取货物信息,并随货物状态的改变对标签信息进行更改[1]㊂设备通过射频终端读取货架上的标签信息,能自动选取空货架㊂在货物上架后,实时更新并记录货物的物流信息,通过Wi-Fi模块传到计算机系统,便于打印入库㊁出库清单和储物仓库的后续管理[2]㊂2.3㊀智能寻路模块2.3.1㊀GPS定位㊀㊀目前,卫星信号覆盖面积十分广阔,使用GPS定位速度快,也相对比较稳定,因此本项目采用GPS模块进行定位㊂GPS模块采用NMEA协议,可以接收㊁解析卫星的广播C/A码信号,通过运算与每个卫星的伪距离,采用距离交会法求出经度㊁纬度㊁高度和时间修正量这4个参数,并通过串口通信将它接收到的信号反馈给主控芯片进行处理㊂GPS模块接收到卫星信号后,通过STM32单片机的通信串口完成交互,主控芯片计算并记录机器人此时的位置情况,对机器人进行下一步的跟踪和定位,实现实时位置信息共享,以便于确定机器人的位置状态,并进一步根据GPS定位技术进行物流机器人的导航[3]㊂2.3.2㊀A∗搜索算法㊀㊀机器人动态路径规划可以通过许多种算法来实现,正确地选择一种算法可以大大提高机器人的寻路效率,本文采用A∗算法(A-star algorithm)进行线路规划㊂A∗算法是一种基于启发式搜索的寻路算法,是一种静态路网中求解最短路径最有效的直接搜索方法,被广泛使用,例如路线规划㊁游戏AI等㊂A∗算法通过估计从起点到目标的最短路径长度,不断地选择当前状态下最优的节点进行扩展,直到找到目标节点或者无法继续扩展为止㊂该算法综合了广度优先搜索和最佳优先搜索的特点,能够在保证找到最优解的同时,尽可能减少搜索的时间和空间复杂度㊂A∗算法的核心思想是通过定义一个启发函数,评估每个节点的优先级㊂启发函数通常是一个估计值,用来估计从当前节点到目标节点的代价,然后综合考虑节点的代价和启发函数的估计值,选择最有希望的节点进行扩展㊂A∗算法维护一个优先队列,每次从队列中选择代价加启发函数估计值最小的节点进行扩展㊂整个过程中,A∗算法需要维护两个列表:开放列表和关闭列表㊂开放列表存储待探索的节点,关闭列表存储已经探索过的节点㊂算法通过计算每个节点的启发式函数值(估计到目标节点的距离)和代价函数值(从起始节点到当前节点的实际代价),选择代价函数值最小的节点进行探索㊂具体计算公式如下所示:f∗(n)=g∗(n)+h∗(n)其中,f∗(n):从初始状态经由状态n到目标状态的最小代价估计;g∗(n):从初始状态到状态n的最小代价;h∗(n):从状态n到目标状态的路径的最小估计代价㊂可行性分析:若h(n)<h∗(n),搜索范围大,效率低,一定能得到最优解;若h(n)=h∗(n),搜索效率最高;若h(n)>h∗(n),搜索范围小,效率高,不一定得到最优解㊂本文将A∗算法运用于分拣机器人,它会从起点开始,根据计算最小代价估计,动态地选择下一个代价最低的节点进行搜索,从而在较短时间内以尽可能快地找到最短路径,到达指定的货架,具有高效性㊂2.3.3㊀超声波避障㊀㊀超声波避障是一种常用的电子模块,可以帮助设备实现自动避障功能,常用于机器人㊁智能车辆㊁安防系统等领域,以提高安全性和可靠性㊂超声波避障技术是利用超声波在遇到障碍物时会被反射,结合信号发射及接收之间的时间差㊁发射器和接收器之间的距离,测算出信号发射器和障碍物之间的距离,从而及时对障碍物进行躲避达到避障效果㊂超声波测距传播距离远㊁范围广㊁速度快㊁计算处理简单,能对各种不同的介质进行反射,因此被广泛使用在各种测距装置中㊂本文采用超声波避障传感器实现自动避障功能㊂超声波避障传感器体积小㊁功耗低㊁抗噪声干扰能力强,且相比红外避障,不易被周围环境干扰㊂将超声波避障模块(包括超声波发射器和接收器)连接到物流机器人的控制电路上,利用程序设置机器人通过发射器周期性地发射一个超声波信号,信号会在储物仓库里扩散,遇到障碍物时便反射回来㊂在接收器接收到经储物仓库里物体反射回来的超声波信号时,会将信息反馈给主控芯片㊂主控芯片根据超声波信号的强度及传播速度对反射回来的信号进行处理,可以计算出障碍物的位置和距离[4]㊂根据机器人和障碍物两者之间的距离,电机驱动器会驱动步进电机转动带动车轮采取相应的措施,例如停止前进㊁转向或改变路径[5],实现自动避障,避免了物流机器人的碰撞和损坏㊂2.4㊀称重及减震模块2.4.1㊀称重模块㊀㊀生活中有各种各样的称重装置,例如家用的起重称㊁超市里的食品称以及称量大型车辆的地磅等,它们的称重原理类似,都是基于一种将质量信号转换为可测量的电信号的称重传感器㊂其中,转换方式为电阻应变式的称重传感器使用最为广泛,它基于应变反应,将应力变化转换为电阻变化㊂本文采用HX711芯片实现称重功能㊂HX711芯片是一款专为精度要求高的称重传感器而设计的24位模数转换器芯片,最大可精确到1g㊂该芯片的时钟输入引脚(PD_SCK)及数据输出引脚(DOUT)组成串口通信线,与主控芯片进行通信㊂根据仓库的实际情况设置多个质量阈值,当机器上货物的质量处于一定范围时,会优先将质量较大的货物放置在下层㊂2.4.2㊀减震模块㊀㊀对于物流仓库内一些不平坦的路面,本文采用弹簧连接减震器的机械结构实现减震功能㊂通过活塞运动产生阻尼力来对弹簧被压缩后的拉伸起到阻尼作用[6]㊂这种减震方式能尽量减少车身与弹簧和减震器之间的相对运动,减震速度快㊁效果好,能有效地保证货物的完整性,并延长机器人的使用寿命㊂2.5㊀升降及上下台阶模块2.5.1㊀升降㊀㊀生活中的升降结构随处可见,工地上的起重机㊁小区里的电梯都用到了升降,为人或物带来高度上的变化,极大地方便了人们的生活和工作㊂本文中的升降采用直流电机组件㊂直流电机组件是一种可以将电能经过一系列复杂的变换之后转换成机械能用来做功的装置,是机械传动结构系统中的一个十分重要的组成和控制部分,因其结构简单㊁价格低廉㊁可靠性高㊁抗电磁干扰影响强等优点,被广泛地应用在人们生活中的各个地方,例如电动车㊁无人机㊁人工智能机器人等㊂此外,直流电机还拥有良好的调速特性,这使得它在工业化进程中也承担了一个极其重要的角色,包括汽车㊁建筑㊁航空航天在内的许多领域的调速系统都需要用到直流电机㊂直流电机效率及可靠性高,工作寿命长,维护简便且成本低,应用广泛,是电力拖动的良好驱动㊂本文采用的直流减速电机能将直流电源的输入与输出转换为模拟量,通过主控芯片进行控制,为升降模块减速传动结构提供驱动力㊂将减速电机连接一对竖直导轨,减速电机通过把电动机的动力通过齿轮(或者蜗轮蜗杆)减速机,大大降低转速,增加减速电机的输出扭矩,从而驱动货物托盘在竖直导轨上自由移动,完成上升或下降㊂2.5.2㊀上下台阶㊀㊀在原本升降系统的基础上添加红外传感器和电机组件,便可以实现上下台阶功能㊂红外传感器是一种非常常见且有用的传感器,根据红外光可反射的物理性质,利用物体发出的红外辐射与传感器接收到的红外辐射之间的差异来进行检测和测量,优点是灵敏度高,反应快,能快速感知物体,可以在许多应用中发挥作用,常用来避障㊁距离测量㊁温度测量等㊂本文在物流机器人上搭载了足够的传感器,用来检测前方是否具有阶梯式障碍物,并通过感知台阶的高度和位置,使物流机器人做出相应的动作㊂正常行驶状态下,电动马达会驱动轮子在水平地面上前进或后退㊂当物流机器人上的红外传感器检测到前方具有阶梯式的障碍之后,减速电机开始运转,依次将机体的各个部分进行抬升或下降,然后通过以上步骤的循环迭代,完成整个上下台阶的动作[7]㊂3 结语㊀㊀仓储物流机器人结合了多种模块,与一些具有一定局限性的机械设备相比更加灵活,能够在各大储物仓库自动完成分拣并存储货物的整个流程㊂RFID技术识别货物的相关信息让数据信息更加准确,称重减震功能分区域存储货物,便于统计管理,并且使货物在运输过程中不易损坏,保障了货物的质量㊂该机器人还有抬升机构帮助升降和上下台阶以适应不同环境㊂机器人正在以肉眼可见的速度渗透到人们日常生活的方方面面,不仅是物流行业,以后许多行业都会呈现机器化趋势㊂本文设计的仓储物流机器人具有性能好㊁工作效率高等特点,能帮助分拣人员从一些危险的工作环境中解放出来,降低了安全事故的发生率及安全事故发生时造成的损失,在自动化生产的进程中具有良好的发展前景㊂参考文献[1]张晏魁.基于无线射频识别技术的冷链物流智能分拣系统设计[J].现代电子技术,2020(20):53-56.[2]谢煜坚,赵笑梅.探析物联网技术在仓储物流领域中的应用分析与展望[J].软件,2022(12): 159-161.[3]吕德利,王旋.一种基于GPS定位技术的无人机智能光伏巡检系统[J].科技创新与应用,2023(6): 37-40.[4]林平伟,黄程新,陈英杰,等.图书自动分拣机器人[J].物联网技术,2023(2):147-149,153.[5]高涵,阮冠鹏,殷治杰,等.一种适用于电影院环境的具有自动巡航功能的消毒机器人[J].科技与创新,2022(18):6-8,12.[6]王恩慧.汽车减震器的现状及其发展趋势[J].科技资讯,2021(12):78-80.[7]张春海,王佩,王桥,等.基于STM32单片机的多功能行李箱的设计[J].电子测试,2022(9):23-25.(编辑㊀王雪芬)Design of automatic sorting type warehousing and logistics robot based on STM32Li Xinglong Wang Pei Zhu Luotong Li Jiang Ma XunlanSchool of Mathematics and Big Data Guizhou Education University Guiyang550018 ChinaAbstract In view of the large quantity and quality of goods in large storage warehouses leading to the disadvantages of low warehouse management an automatic sorting warehousing and logistics robot based on STM32is designed. Using radio frequency identification RFID technology automatically identify goods information through the algorithm design automatic planning path running to the corresponding shelf position ultrasonic obstacle avoidance technology to avoid obstacles to complete intelligent road finding using the Internet of things sensor technology for weighing mechanical structure technology STM32MCU technology up and down the steps and lift.Under the cooperation of the above modules the goods can be stored safely quickly and accurately on the pared with the traditional manual sorting efficiency has been significantly improved greatly reducing the labor cost and danger coefficient and has a broad development space and application prospect in the realization of unmanned management of warehousing and logistics.Key words automatic sorting RF identification sensor STM32 up and down steps lifting。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910230610.3
(22)申请日 2019.03.26
(71)申请人 南京理工大学
地址 210094 江苏省南京市玄武区孝陵卫
200号
(72)发明人 郭进 何俊杰 王超尘 邹卫军
杨毅 白云耀
(74)专利代理机构 南京苏创专利代理事务所
(普通合伙) 32273
代理人 张学彪
(51)Int.Cl.
G05B 19/042(2006.01)
(54)发明名称一种基于STM32的电动货架系统(57)摘要本发明公开了一种基于STM32的电动货架系统,包括电源模块、控制单元、通信单元、隔离单元和驱动单元,电源模块连接控制单元、通信单元和驱动单元,用于给各个单元供电;控制单元连接隔离单元和通信单元,用于执行逻辑代码和处理数据,包括STM32芯片、最小系统模块和指示模块。
本发明采用模块化方法设计,充分利用了STM32芯片上丰富的外设资源,这样既能够保证每个模块的独立性,又能够实现各部分的互相联系,且数据处理速度较快;本发明由于采用模块化的设计思想,使得各模块的接口变得十分简单,同时方便了软件编程以及货架系统后期升级维修;且本系统使用STM32芯片降低系统成本,提高系统的灵活性和通用性,适用于电动货架系
统。
权利要求书1页 说明书5页 附图7页CN 110083087 A 2019.08.02
C N 110083087
A
权 利 要 求 书1/1页CN 110083087 A
1.一种基于STM32的电动货架系统,其特征在于:包括电源模块、控制单元、通信单元、隔离单元和驱动单元,
所述电源模块连接所述控制单元、通信单元和驱动单元,用于给各个单元供电;
所述控制单元连接隔离单元和通信单元,用于执行逻辑代码和处理数据,包括STM32芯片、最小系统模块和指示模块;
所述最小系统模块和指示模块基于所述STM32芯片设置,所述最小系统模块包括复位电路、晶振电路和去耦合电路,
所述复位电路包括按键和电容,采用按键复位和电容上电复位,对所述STM32芯片中的代码进行硬件复位,
所述晶振电路包括有源晶体振荡器,用于产生固定的振荡频率,驱动所述STM32芯片工作,
所述去耦合电路设在所述STM32芯片的电源引脚附近,采用并联结构并联电源和地之间的电容,用于给所述STM32芯片提供稳定的电源,去除所述STM32芯片电源管脚上的噪音;
所述指示模块包括设在所述STM32芯片的IO口驱动的多位LED指示灯,用于指示货架状态和控制单元的各个状态;
所述隔离单元连接控制单元和驱动单元,包括电源隔离电路和信号隔离电路,实现所述控制单元和所述驱动单元之间的物理隔绝;
所述通信单元设在所述STM32芯片上,采用RS485、RS232和CAN通信,设有接口保护电路,实现电平转换和外部接口设计,用于与外部进行多种协议通讯和指示系统状态;
所述驱动单元包括若干个货架,每个所述货架中均设有MOS驱动、MOS开关管、接近开关和电机抱闸,
所述MOS驱动包括两个半桥驱动芯片和外围电路,两个所述半桥驱动芯片分别控制MOS 半桥的高端和低端,所述高端的驱动设有外围自举电压电路,用于保证所述MOS驱动的正常工作。
2.根据权利要求1所述的基于STM32的电动货架系统,其特征在于: 所述电源隔离电路采用变压器隔离,所述信号隔离电路采用磁隔离或光耦隔离。
3.根据权利要求1所述的基于STM32的电动货架系统,其特征在于:所述外围自举电压电路包括电容和二极管,所述电容并联在MOS驱动的电源引脚和N沟道MOS管的源极,所述二极管放置于电源和MOS驱动的电源引脚,避免升高的电压倒灌电源。
4.根据权利要求1所述的基于STM32的电动货架系统,其特征在于: 所述MOS驱动包括死区设计,避免MOS半桥的高端和低端同时导通,导致电源损坏。
5.根据权利要求1所述的基于STM32的电动货架系统,其特征在于:所述电机抱闸选用24V电压驱动,上电时自动锁定。
6.根据权利要求2所述的基于STM32的电动货架系统,其特征在于:所述接近开关选用24V直流供电,输出形式为低电平有效的开关量,所述开关量通过光耦隔离将信号传输给控制单元,构成反馈环节。
2。