控制系统的MATLAB仿真与设计课后答案
MATLAB语言与控制系统仿真-参考答案-第7章
7.3控制系统根轨迹分析MATLAB 仿真实训7.3.1实训目的1. 掌握运用MATLAB 绘制180度、0度根轨迹图的编程方法;2. 学会通过根轨迹图获取相关信息的方法;3. 利用仿真结果对系统根轨迹进行分析;4.学会通过根轨迹图分析和解决一些实际问题。
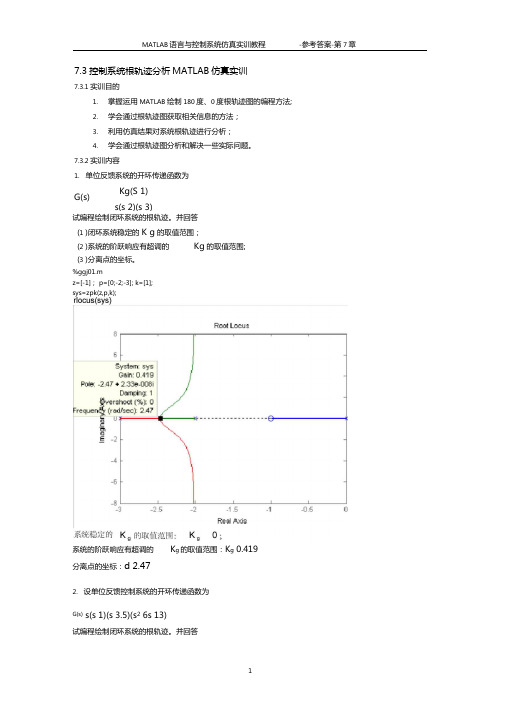
7.3.2实训内容1. 单位反馈系统的开环传递函数为试编程绘制闭环系统的根轨迹。
并回答 (1 )闭环系统稳定的 K g 的取值范围; (2 )系统的阶跃响应有超调的 Kg 的取值范围;(3 )分离点的坐标。
%ggj01.mz=[-1]; p=[0;-2;-3]; k=[1]; sys=zpk(z,p,k);系统的阶跃响应有超调的 K g 的取值范围:K g 0.419分离点的坐标:d 2.472. 设单位反馈控制系统的开环传递函数为G(s) s(s 1)(s 3.5)(s 2 6s 13)试编程绘制闭环系统的根轨迹。
并回答G(s)Kg(S 1) s(s 2)(s 3)(1 )闭环系统稳定的K的取值范围;(2) 根轨迹与虚轴的交点坐标; (3) 分离点的坐标。
ggj02.m%根轨迹仿真实训第 2题 n=1;d=co nv([1,0],co nv([1,1],co nv([1,3.5],[1,6,13]))); rlocus( n,d)10 -s由图上数据可知:闭环系统稳定的 K 的取值范围:0 K 70.9 ; 根轨迹与虚轴的交点坐标:j1.02 ;分离点的坐标:d 0.403。
3. 设单位反馈控制系统的开环传递函数为KG(s)- s(s 4)( s 4s 20)试编程绘制闭环系统的根轨迹。
并回答 (1 )闭环系统稳定的K 的取值范围;(2) 根轨迹与虚轴的交点坐标; (3) 各个分离点的坐标。
%根轨迹仿真实训第 3题Root Locus640 ■2-10-40 2斗6Real AxisDaimninn- -Fl IT10125System 割g j : i go^ainc £4祁怎比〕:3.15Pole : -2 + 7.51e-D06i Damping: 1 Overshoot (%): 0 Frequency (racVsec): 2由图上数据可知:闭环系统稳定的 K 的取值范围:0 K 262 ; 根轨迹与虚轴的交点坐标:j3.18 ;分离点的坐标:d,2,d 2,32 j2.45。
控制系统仿真matlab第六章习题答案汇总
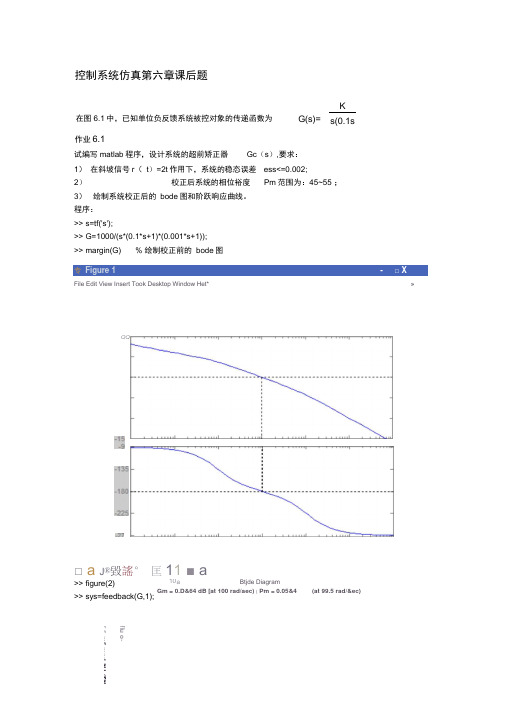
控制系统仿真第六章课后题作业6.1试编写matlab 程序,设计系统的超前矫正器 Gc (s ),要求:1) 在斜坡信号r ( t )=2t 作用下,系统的稳态误差 ess<=0.002;2)校正后系统的相位裕度 Pm 范围为:45~55 ; 3) 绘制系统校正后的 bode 图和阶跃响应曲线。
程序:>> s=tf('s');>> G=1000/(s*(0.1*s+1)*(0.001*s+1));>> margin(G)% 绘制校正前的 bode 图 专 Figure 1 - □ X File Edit View Insert Took Desktop Window Het* »□ a J ®毀謠° 匡11 ■ a >> figure(2)>> sys=feedback(G,1); 在图6.1中,已知单位负反馈系统被控对象的传递函数为G(s)= Ks(0.1s 1)(0.0QQo oBtjde Diagram Gm = 0.D&64 dB [at 100 rad/aec) ( Pm = 0.05&4 (at 99.5 rad/&ec)flu o-5 5 mE mprl 左一6『左 a 10>> step(sys) %绘制校正前的单位阶跃响应曲线Figure 2File Edit 过ew Insert Tools Window Help□已鸟|罠4紗®悬乙| 口目| ■回Step Response1.3>> [Gm,Pm]=margin(G); %该句值计算bode图的增益裕量Gm和相位裕量Pm >> [mag,phase,w]=bode(G); %该句只计算bode图上多个频率点w对应的幅值和相位>> QWPm=50; %取矫正后的相位为50>> Flm=QWPm-Pm+5;>> Flm=Flm*pi/180;>> alfa=(1-si n(FIm))/(1+si n( FIm));>> adb=20*log10(mag);>> am=10*log10(alfa);>> wc=spli ne(adb,w,am);>> T=1/(wc*sqrt(alfa));>> alfat=alfa*T;>> Gc=tf([T 1],[alfat 1]) %校正器的传递函数Tran sfer function:0.01794 s + 1Time 330.00179 s + 1>> figure(3)>> margin(Gc*G) %系统矫正后的bode图Ffgure 3Filt gdit yisw ifisert Hcdt Mfimdcw title】I ■回Bode DiagramGm = 17.6 dB (st 69B rad/sec) s Pm = 4S.2 deg (at 176 rad/sec)"I 0 0 N -- 1 1 I I I ! 1 ! | ! ■' I I ' ' I J I I ........... | I I « i i i | i | i f ■ J !!|!|>> figure(4)>> step(feedback(Gc*G ,1)) % 校正后的单位阶跃响应曲线Figure 4n xl Fie Edit 辺足w Insert Tools Desktop Window HelpO t3 J -S □ S ■ Q1010°ID1 1 孑10Frequency (r&fh'see)作业6.2在图6.1中,已知单位负反馈系统被控对象的传递函数为试编写matlab 程序,设计系统的滞后校正器 Gc ( s ),要求:1) 在斜坡信号r(t)=t 作用下,系统的稳态误差ess 乞0.01 ; 2) 校正后系统的相位裕度 Pm 范围为:40~50 ;3) 绘制系统矫正前后的 bode 图和阶跃响应曲线。
Matlab与控制系统仿真部分习题答案
【4.2】程序:num=[5,0];den=conv([1,1],conv([1,2],[1,3])); [numc,denc]=cloop(num,den);[z,p,k]=tf2zp(numc,denc);[A,B,C,D]=tf2ss(numc,denc);g_zp=zpk(z,p,k)g_tf=tf(numc,denc)g_ss=ss(A,B,C,D)运行结果:Zero/pole/gain:5 s----------------------------------(s+0.4432) (s^2 + 5.557s + 13.54)Transfer function:5 s----------------------s^3 + 6 s^2 + 16 s + 6a =x1 x2 x3x1 -6 -16 -6x2 1 0 0x3 0 1 0b =u1x1 1x2 0x3 0c =x1 x2 x3y1 0 5 0d =u1y1 0【4.3】程序:A=[0 0 0 -1;1 0 0 -2;0 1 0 -3;0 0 1 -4]; B=[0;0;0;1];C=[1 0 0 0];g_ss=ss(A,B,C,D)[num,den]=ss2tf(A,B,C,D);g_tf=tf(num,den)[z,p,k]=ss2zp(A,B,C,D);g_zpk=zpk(z,p,k)运行结果:a =x1 x2 x3 x4x1 0 0 0 -1x2 1 0 0 -2x3 0 1 0 -3x4 0 0 1 -4b =u1x1 0x2 0x3 0x4 1c =x1 x2 x3 x4y1 1 0 0 0d =u1y1 0Continuous-time model.Transfer function:-3.109e-015 s^3 - s^2 - 3.331e-015 s - 4.441e-016 -------------------------------------------------s^4 + 4 s^3 + 3 s^2 + 2 s + 1Zero/pole/gain:- s^2----------------------------------------------(s+0.6724) (s+3.234) (s^2 + 0.0936s + 0.4599)【5.1】(1)程序num=[0,10];den=conv([1,0],[1,7,17]); [numc,denc]=cloop(num,den,-1); G=tf(numc,denc)[y,t]=step(G);plot(t,y,'b-')C=dcgain(G);n=1;while y(n)<0.1*Cn=n+1;endm=1;while y(m)<0.9*Cm=m+1;endrisetime=t(m)-t(n)[Y,k]=max(y); percentovershoot=100*(Y-C)/Ci=length(t);while(y(i)>0.98*C)&(y(i)<1.02*C) i=i-1;endsettlingtime=t(i)运行结果:Transfer function:10-----------------------s^3 + 7 s^2 + 17 s + 10risetime =2.7312percentovershoot =-0.4399settlingtime =5.1372图:0123456700.10.20.30.40.50.60.70.80.91(2)程序k=[10,100,1000];t=linspace(1,20,200);num=1;den=conv([1,0],[1,7,17]);for j=1:3;s1=tf(num*k(j),den);sys=feedback(s1,1)y(:,j)=step(sys,t);endplot(t,y(:,1),'r',t,y(:,2),'b',t,y(:,3),'g')gtext('k=10');gtext('k=100');gtext('k=1000') 运行结果:Transfer function:10-----------------------s^3 + 7 s^2 + 17 s + 10Transfer function:100------------------------s^3 + 7 s^2 + 17 s + 100Transfer function:1000-------------------------s^3 + 7 s^2 + 17 s + 1000图:024681012141618200.20.40.60.811.21.41.61.8图:02468101214161820-3-2-1123422【6.1】程序:(1)num1=[1,1];den1=conv([1,0,0],conv([1,2],[1,4]));sys1=tf(num1,den1)rlocus(sys1)运行结果:-12-10-8-6-4-2024-8-6-4-202468Root LocusReal Axis I m a g i n a r y A x i s(2)num2=[1,1];den2=conv([1,0],conv([1,-1],[1,4,16]));sys2=tf(num2,den2)rlocus(sys2)运行结果:-10-8-6-4-2024-8-6-4-202468Root LocusReal Axis I m a g i n a r y A x i s(3)num3=[1,8];den3=conv([1,0,0],conv([1,3],conv([1,5],conv([1,7],[1,15])))); sys3=tf(num3,den3)rlocus(sys3)运行结果:-30-25-20-15-10-5051015-20-15-10-505101520Root LocusReal Axis I m a g i n a r y A x i s【6.3】程序:num=[1,2];den=conv([1,0],conv([1,4],conv([1,8],[1,2,5])));sys=tf(num,den)rlocus(sys)[k,poles]=rlocfind(sys)运行结果:Transfer function:s + 2---------------------------------------s^5 + 14 s^4 + 61 s^3 + 124 s^2 + 160 sSelect a point in the graphics windowselected_point =0.0296 + 2.2826i k =135.8815poles =-7.3248-5.41040.0145 + 2.3021i0.0145 - 2.3021i -1.2939图:-20-15-10-5051015-15-10-551015Root LocusReal Axis I m a g i n a r y A x i s【7.3】程序(1)画波特图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)bode(sys)grid图(1)-150-100-50050100M a g n i t u d e (d B)10-210-1100101102103-270-225-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)程序(2)画奈奎斯特图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)nyquist(sys)grid图(2)-16-14-12-10-8-6-4-20-300-200-100100200300Nyquist DiagramReal Axis I m a g i n a r y A x i s程序(3)画零极点图num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)pzmap(sys1)gird图(3)P ole-Zero MapReal Axis I m a g i n a r y A x i s -12-10-8-6-4-20-1.5-1-0.50.511.5程序(4)计算相角裕量和幅值裕量num=[50];den=conv([1,0],conv([1,10],[3,1]));sys=tf(num,den)sys1=feedback(sys,1)[gm,pm,wcg,wcp]=margin(sys)运行结果Transfer function:50---------------------3 s^3 + 31 s^2 + 10 sTransfer function:50--------------------------3 s^3 + 31 s^2 + 10 s + 50gm =2.0667pm =7.5615wcg =1.8257wcp =1.2645程序(5)绘制阶跃响应曲线num=[50];den=conv([1,0],conv([1,10],[3,1])); sys=tf(num,den)sys1=feedback(sys,1)step(sys1)图(5)00.20.40.60.811.21.41.61.82Step ResponseTime (sec)A m p l i t u d e【7.4】程序如下:num=[300];den=conv([1,0,0],conv([0.2,1],[0.02,1]));sys=tf(num,den)margin(sys)grid波特图如下:-150-100-50050100M a g n i t u d e (d B )10-1100101102103-360-315-270-225-180P h a s e (d e g )Bode DiagramGm = Inf , P m = -78 deg (at 11 rad/sec)Frequency (rad/sec)【9.3】程序:A=[-2 2 -1;0 -2 0;1 -4 0];B=[0;0;1];C=[1,0,0];D=0;M=ctrb(A,B)m=rank(M)if m==3;disp('系统可控')elsedisp('系统不可控')endN=obsv(A,C)n=rank(N)if n==3;disp('系统可观')elsedisp('系统不可观') endsys=ss(A,B,C,D) [num,den]=ss2tf(A,B,C,D) sys1=tf(num,den)[z,p,k]=ss2zp(A,B,C,D)运行结果:M =0 -1 20 0 01 0 -1m =2系统不可控N =1 0 0-2 2 -13 -4 2n =2系统不可观a =x1 x2 x3x1 -2 2 -1x2 0 -2 0x3 1 -4 0b =u1x1 0x2 0x3 1c =x1 x2 x3y1 1 0 0d =u1y1 0 Continuous-time model.0 0 -1 -2den =1 4 5 2Transfer function:-s - 2---------------------s^3 + 4 s^2 + 5 s + 2z =-2p =-1-1-2k = -1【10.1】(1)程序:A=[0,1,0,0;0,5,0,0;0,0,-7,0;0,0,0,-8]; B=[0;1;0;1];C=[1,2,3,4];D=zeros(1,1);G_ss=ss(A,B,C,D)运行结果:a =x1 x2 x3 x4x1 0 1 0 0x2 0 5 0 0x3 0 0 -7 0x4 0 0 0 -8u1x1 0x2 1x3 0x4 1c =x1 x2 x3 x4y1 1 2 3 4d =u1y1 0(2):程序:[num1,den1]=ss2tf(A,B,C,D); p=roots(den1)i=0;for k=1:1:length(p)if real(p(k))>0i=i+1;endendif i>0disp('系统不稳定');elsedisp('系统稳定');end运行结果:p =5.0000-8.0000-7.0000系统不稳定(3)(4)程序:AA=[0,1,0;0,5,0;0,0,-8];BB=[0;1;1];P=[-1,-2,-8];K=acker(AA,BB,P);i=4;K(4)=0;Kpp=eig(A-B*K)sys1=tf(num1,den1);[y1,t]=step(sys1);plot(t,y1)hold onA_feedback=A-B*K;[num2,den2]=ss2tf(A_feedback,B,C,D); sys2=tf(num2,den2);[y2,t]=step(sys2);plot(t,y2,'r')gridgtext('反馈前')gtext('反馈后')运行结果:K =2 8 0 0pp =-8-2-1-7图形:01234560123456【13.1】程序:A=[0,1;0,0];B=[0;1];C=[1,0];D=zeros(1,1);G_ss=ss(A,B,C,D)M=ctrb(A,B);if rank(M)==2disp('系统完全能控'); elsedisp('系统不完全能控'); endS=[1,0];N=obsv(A,S);if rank(N)==2disp('(A,S)可观测'); elsedisp('(A,S)不可观测'); endR=1;Q=[1,0;0,0];[K,P,E]=Lqr(A,B,Q,R)A_new=A-B*K;G_new=ss(A_new,B,C,D);t=linspace(0,5,100)';y1=step(G_ss,t);y2=step(G_new,t);plot(t,y1,'r:',t,y2,'b-')gridgtext('反馈前')gtext('反馈后')运行结果:a =x1 x2x1 0 1x2 0 0b =u1x1 0x2 1c =x1 x2y1 1 0d =u1y1 0Continuous-time model. 系统完全能控(A,S)可观测K =1.0000 1.4142P =1.4142 1.00001.0000 1.4142E =-0.7071 + 0.7071i-0.7071 - 0.7071i图形:00.51 1.52 2.53 3.54 4.5502468101214。
MATLAB语言:Simulink系统仿真习题与答案

一、单选题1、将模块连接好之后,如果要分出一根连线,操作方法是()。
A.把鼠标指针移到分支点的位置,按住鼠标左键拖曳到目标模块的输入端B.双击分支点的位置,按住鼠标左键拖曳到目标模块的输入端C.把鼠标指针移到分支点的位置,按下Ctrl键并按住鼠标拖曳到目标模块的输入端D.把鼠标指针移到分支点的位置,按下Shift键并按住鼠标拖曳到目标模块的输入端正确答案:C2、在一个模型窗口上按住一个模块并同时按Shift键移动到另一个模型窗口,则()。
A.在两个模型窗口都有这个模块B.在后一个窗口有这个模块C.在前一个窗口有这个模块D.在两个窗口都有模块并添加连线正确答案:A3、为子系统定制参数设置对话框和图标,使子系统本身有一个独立的操作界面,这种操作称为子系统的()。
A.包装B.封装C.集成D.组合正确答案:B4、使用S函数时,要在模型编辑窗口添加()。
A.Sine Wave模块B.S-Program模块C.Subsystem模块D.S-Function模块正确答案:D二、多选题1、启动Simulink的方法有()。
A.在命令行窗口中输入simulink命令B.在“主页”选项卡中单击SIMULINK命令组中的“Simulink”命令按钮C.在“主页”选项卡中单击“文件”命令组中的“新建”命令按钮D.在“主页”选项卡中单击“文件”命令组中的“新建脚本”命令按钮正确答案:A、B、C2、根据控制信号的控制方式不同,条件执行子系统分为()。
A.事件驱动子系统B.使能子系统C.触发子系统D.使能加触发子系统正确答案:B、C、D3、以下关于S函数的描述中,正确的有()。
A.利用S函数可以对Simulink模块库进行扩充B.S函数只能用MATLAB语言编写C.S函数有现成的模板程序D.S函数模块能够被封装正确答案:A、C、D三、判断题1、建立系统仿真模型是在Simulink模型编辑窗口中进行的。
正确答案:√2、利用触发子系统能够将锯齿波转换为方波。
MATLAB语言与控制系统仿真_参考题答案_第3章

3.5 MATLAB 绘图实训3.5.1 实训目的1.学会MATLAB 绘图的基本知识;2.掌握MATLAB 子图绘制、图形注释、图形编辑等基本方法;3.学会通过MATLAB 绘图解决一些实际问题;4.练习二维、三维绘图的多种绘图方式,了解图形的修饰方法;5.学会制作简单的MATLAB 动画。
图3-46 炮弹发射示意图3.5.2 实训内容1. 炮弹发射问题〔1炮弹发射的基础知识炮弹以角度α射出的行程是时间的函数,可以分解为水平距离)(t x 和垂直距离)(t y 。
)cos()(0αtv t x = %水平方向的行程; 205.0)sin()(gt tv t y -=α %垂直方向的行程;其中,0v 是初速度;g 是重力加速度,为9.82m/s ;t 是时间。
〔2炮弹发射程序举例:分析以下程序以及图3-47各个图形的实际意义。
a=pi/4; v0=300; g=9.8;t=0:0.01:50; x=t*v0*cos<a>;y=t*v0*sin<a>-0.5*g*t.^2;subplot<221>;plot<t,x>;grid;title<‘时间-水平位移曲线'>; subplot<222>;plot<t,y>;grid;title<‘时间-垂直位移曲线'>; subplot<223>;plot<x,y>;grid;title<‘水平位移-垂直位移曲线'>; subplot<224>;plot<y,x>;grid;title<‘垂直位移-水平位移曲线'>; 图3-4745角发射曲线 〔3编程解决炮弹发射问题①假设在水平地面上以垂直于水平面的角度向上发射炮弹,即发射角90=α,假设初速度分别为[310,290,270]m/s,试绘制时间-垂直位移曲线,编程求取最高射程;绘图要求:◆ 标题设为"炮弹垂直发射问题";◆ 在图上通过添加文本的方式表明初速度; ◆ 在x 轴标注"时间";◆ 在y 轴上标注"垂直距离"; ◆ 添加网格线;◆ 将310m/s 的曲线改为线粗为2的红色实线; ◆ 将290m/s 的曲线改为线粗为3的绿色点划线;◆ 将270m/s 的曲线改为线粗为2的蓝色长点划线;a=pi/2; v1=310; g=9.8;t=0:0.01:50; x1=t*v1*cos<a>;y1=t*v1*sin<a>-0.5*g*t.^2;plot<t,y1>;grid; title<'炮弹垂直发射问题'>; xlabel<'时间'>; ylabel<'垂直距离'>; hold on; v2=290;x2=t*v2*cos<a>;y2=t*v2*sin<a>-0.5*g*t.^2; plot<t,y2>; v3=270;x3=t*v3*cos<a>;y3=t*v3*sin<a>-0.5*g*t.^2; plot<t,y3>;zgsc=[max<y1>; max<y2>; max<y3>] %三次发射的最高射程 运行结果如下: zgsc =1.0e+003 * 4.9031 4.29083.7194最高射程分别为:4903.1米,4290.8米,3719.4米。
MATLAB语言与控制系统仿真-参考答案-第8章

MATLAB语言与控制系统仿真-参考答案-第8章8.6 控制系统的Simulink仿真实训8.6.1实训目的:1.学会运用Simulink进行系统仿真;2.了解子系统的创建方法及简单应用;3.运用Simulink实现混沌控制系统的仿真;4.运用Simulink实现伺服跟踪系统等系统的仿真;8.6.2实训内容:1.按照图8-39所示建立系统的结构图文件。
图8-39(1)K=50,纪录图示三处的波形,分析系统的稳态性并给出稳态误差。
仿真文件:sx8620101.mdl系统稳定,稳态误差为0;(2)K=200,纪录图示三处的波形,根据曲线分析系统的稳定性。
仿真文件:sx8620102.mdl由输出曲线可以看出闭环系统不稳定;(3)编写程序求取K=200时的闭环传递函数,求出系统的闭环极点(特征根),说明系统的稳定性,分析与(2)得出的结论是否一致。
%实训8620103.mn1=3;d1=[1,2];[n2,d2]=cloop(n1,d1);sysa=tf(n2,d2);sysb=tf([200],[1,0])*tf([1],[1,5]);sysc=sysa*sysb/(1+sysa*sysb);[nc,dc]=tfdata(sysc,'v');roots(dc)>> ans =-12.0549 1.0275 + 6.9797i 1.0275 - 6.9797i -5.0000 + 0.0000i -5.0000 - 0.0000i有两个特征根在右半平面,闭环系统不稳定;与(2)得出的稳定性结论一致。
2. 子系统创建实验(1)建立如下系统。
(2)选定范围,创建子系统并定义变量a 。
图8-40(3)利用创建的子系统,分别记录10,8,6,4,2 a 时所示系统的输出波形。
a=2a=4a=6a=8a=103.已知四维混沌系统的运动方程如下,试用Simulink 进行仿真。
+-=+-=-+=+-=321444213343121243212110)(10)(35x x x x xx x x x x x x x x x xx x x x x x (1)四个积分器的初始值自定,建议在(0.01,3.0)范围内随机给出。
MATlab 仿真部分习题答案
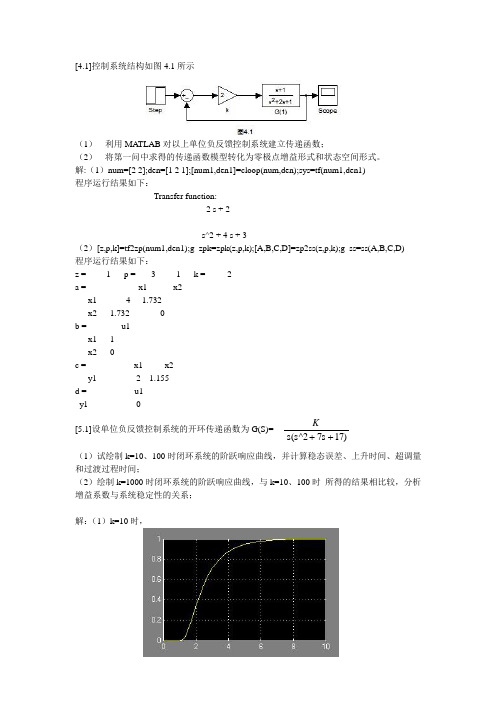
[4.1]控制系统结构如图4.1所示(1)利用MATLAB对以上单位负反馈控制系统建立传递函数;(2)将第一问中求得的传递函数模型转化为零极点增益形式和状态空间形式。
解:(1)num=[2 2];den=[1 2 1];[num1,den1]=cloop(num,den);sys=tf(num1,den1)程序运行结果如下:Transfer function:2 s + 2-------------s^2 + 4 s + 3(2)[z,p,k]=tf2zp(num1,den1);g_zpk=zpk(z,p,k);[A,B,C,D]=zp2ss(z,p,k);g_ss=ss(A,B,C,D)程序运行结果如下:z = -1 p = -3 -1 k = 2a = x1 x2x1 -4 -1.732x2 1.732 0b = u1x1 1x2 0c = x1 x2y1 2 1.155d = u1y1 0K[5.1]设单位负反馈控制系统的开环传递函数为G(S)=+s(s^2+7s17)(1)试绘制k=10、100时闭环系统的阶跃响应曲线,并计算稳态误差、上升时间、超调量和过渡过程时间;(2)绘制k=1000时闭环系统的阶跃响应曲线,与k=10、100时所得的结果相比较,分析增益系数与系统稳定性的关系;解:(1)k=10时,K=100时,K=10时,利用MA TLAB工作区输入程序:num=[10];den=[1,7,17,0];[z,p,k]=tf2zp( num,den);运行得z,p,k的值p= -3.5+2.1794*i -3.5-2.1794*i k=10G=zpk([ ],[-3.5+2.1794*i,-3.5-2.1794*i],10);c=dcgain(G);[y,t]=step(G);plot(t,y)[Y,K]=max(y);timetopeak=t(k);percentovershoot=100*(y-c)/cn=1;while y(n)<c n=n+1;end risetime=t(n) i=length(t);while(y(i)>0.98*c&y(i)<1.02*c) i=i-1;End setllingtime=t(i) 运行程序结果为:稳定值c=0.5882,响应时间setllingtime=1.0096s,上升时间risetime=1.1989s,最大峰值时间timetopeak=1.4356,超调量percentovershoot=0.555% 同理得k=100时,稳定值c=5.882,响应时间setllingtime=1.0096s, 上升时间risetime=1.1989s,最大峰值时间timetopeak=1.4356,超调量percentovershoot=0.555%(3)k=1000时,由其响应曲线可知,增益系数越大,其稳定性越差。
MATLAB语言及控制系统仿真_参考答案解析_第2章

2.12 MATLAB 语言的数值运算-实训2.12.1实训目的1.学会矩阵的建立方法及其矩阵的转置、相乘、求逆等运算;2.识别了解特殊矩阵;3.学会求解方程与方程组;4.学会通过编程解决一些实际问题; 2.12.2实训内容 1.矩阵建立及其运算]4321012345[1-----=A[]0.19.08.07.06.05.04.03.02.01.02=A ]0.19.08.07.06.05.04.03.02.01.0[3=A][40.19.08.07.06.05.04.03.02.01.0e e e e e e e e e e A = ]2222222222[50.19.08.07.06.05.04.03.02.01.0=A求(1)211A A D += (2)232A A D -= (3)4/.13A D = (4)5*.44A A D = (5)5*35A D = (6))2(.^16A D =>> A1=-5:4;>> A2=0.1:0.1:1.0; >> A3=sqrt(A2); >> A4=exp(A2); >> A5=2.^(A2); >> format bank >> D1=A1+A2 D1 =-4.90 -3.80 -2.70 -1.60 -0.50 0.60 1.70 2.80 3.90 5.00 >> D2=A3-A2 D2 =0.22 0.25 0.25 0.23 0.21 0.17 0.14 0.09 0.05 0 >> D3=1./A4 D3 =0.90 0.82 0.74 0.67 0.61 0.55 0.50 0.45 0.41 0.37 >> D4=A4.*A5D4 =1.18 1.40 1.66 1.972.33 2.763.27 3.874.595.44 >> D5=3*A5 D5 =3.22 3.45 3.69 3.964.24 4.55 4.875.22 5.606.00 >> D6=A1.^2 D6 =25.00 16.00 9.00 4.00 1.00 0 1.00 4.00 9.00 16.002.建立矩阵⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-----=1418712106114231359152345686420B(1)矩阵B 的逆矩阵)(inv B (2)矩阵B 对应的行列式)det(B>> B=[0:2:8;-6:-2;15,9,5,13,3;2,4,11,6,10;12,7,8,1,14]B =0 2.00 4.00 6.00 8.00 -6.00 -5.00 -4.00 -3.00 -2.00 15.00 9.00 5.00 13.00 3.00 2.00 4.00 11.00 6.00 10.00 12.00 7.00 8.00 1.00 14.00 >> inv(B) ans =-0.18 0.29 0.11 0.07 0.07 0.31 -0.72 -0.20 -0.23 -0.07 -0.21 0.11 0.03 0.21 -0.02 0.05 0.11 0.08 0.02 -0.04 0.12 0.04 -0.02 -0.06 0.06 >> det(B) ans =-17568.00(3)利用矩阵元素的提取方法建立以下矩阵 ①矩阵b01:矩阵B 的3~4行元素; ②矩阵b02:矩阵B 的2~5列元素;③矩阵b03:由矩阵B 的1~3行2~4列交叉点所对应的元素组成; >> B=[0:2:8;-6:-2;15,9,5,13,3;2,4,11,6,10;12,7,8,1,14]; >> b01=B(3:4,:) b01 =15.00 9.00 5.00 13.00 3.002.00 4.00 11.00 6.00 10.00 >> b02=B(:,2:5) b02 =2.00 4.00 6.00 8.00 -5.00 -4.00 -3.00 -2.00 9.00 5.00 13.00 3.004.00 11.00 6.00 10.00 7.00 8.00 1.00 14.00 >> b03=B(1:3,2:4) b03 =2.00 4.00 6.00 -5.00 -4.00 -3.00 9.00 5.00 13.00 3.矩阵的转置与翻转已知矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=151413121110987654321m ,求取以下矩阵观察并记录。
《控制系统计算机辅助设计MATLAB语言与应用第2版》薛定宇_课后习题答案
【17】
(1)z=xy
>>[x,y]=meshgrid(-3:0.01:3,-3:0.01:3);
z=x.*y;
mesh(x,y,z);
>> contour3(x,y,z,50);
(1)z=sin(xy)
>> [x,y]=meshgrid(-3:0.01:3,-3:0.01:3);
【2】
相应的MATLAB命令:B=A(2:2:end,:)
>>A=magic(8)
A=
642361606757
955541213 515016
174746 202143 4224
4026273736 303133
323435 292838 3925
4123224445191848
491514 5253 11 10 56
【10】
function y=fib(k)
if nargin~=1,error('出错:输入变量个数过多,输入变量个数只允许为1!');endﻭif nargout>1,error('出错:输出变量个数过多!');end
if k<=0,error('出错:输入序列应为正整数!');endﻭifk==1|k==2,y=1;ﻭelsey=fib(k-1)+fib(k-2);endﻭend
858 5954 62 631
>>B=A(2:2:end,:)
B =
955 541213515016
40262737 36303133
41232244451918 48
858 5954 62631
控制系统的Matlab仿真与设计课后答案

控制系统的Matlab仿真与设计课后答案第一篇:控制系统的Matlab仿真与设计课后答案MATLAB课后习题答案 2.1 x=[15 22 33 94 85 77 60] x(6)x([1 3 5])x(4:end)x(find(x>70))2.3 A=zeros(2,5);A(:)=-4:5L=abs(A)>3 islogical(L)X=A(L)2.4 A=[4,15,-45,10,6;56,0,17,-45,0] find(A>=10&A<=20)2.5 p1=conv([1,0,2],conv([1,4],[1,1]));p2=[1 0 1 1];[q,r]=deconv(p1,p2);cq='商多项式为';cr='余多项式为';disp([cq,poly2str(q,'s')]),disp([cr,poly2str(r,'s')])2.6 A=[11 12 13;14 15 16;17 18 19];PA=poly(A)PPA=poly2str(PA,'s')3.1 n=(-10:10)';y=abs(n);plot(n,y,'r.','MarkerSize',20)axis equal grid on xlabel('n')3.2 x=0:pi/100:2*pi;y=2*exp(-0.5*x).*sin(2*pi*x);plot(x,y),grid on;3.3 t=0:pi/50:2*pi;x=8*cos(t);y=4*sqrt(2)*sin(t);z=-4*sqrt(2)*sin(t);plot3(x,y,z,'p');title('Line in 3-D Space');text(0,0,0,'origin');xlabel('X'),ylable('Y'),zlable('Z');grid;3.4theta=0:0.01:2*pi;rho=sin(2*theta).*cos(2*theta);polar(theta,rho,'k');3.5[x,y,z]=sphere(20);z1=z;z1(:,1:4)=NaN;c1=ones(size(z1));surf(3*x,3*y,3*z1,c1);hold on z2=z;c2=2*ones(size(z2));c2(:,1:4)=3*ones(size(c2(:,1:4)));surf(1.5*x,1.5*y,1.5*z2,c2);col ormap([0,1,0;0.5,0,0;1,0,0]);grid on hold off 第四章function f=factor(n)if n<=1 f=1;elsef=factor(n-1)*n;endfunction[s,p]=fcircle(r)s=pi*r*r;p=2*pi*r;function k=jcsum1(n)k=0;i=0;while i<=n k=k+2^i;i=i+1;end function k=jcsum(n)k=0;for i=0:n k=k+2^i;end4.1for m=100:999m1=fix(m/100);m2=rem(fix(m/10),10);m3=rem(m,10);ifm==m1*m1*m1+m2*m2*m2+m3*m3*m3 disp(m)end end4.2[s,p]=fcircle(10)4.3y=0;n=100;for i=1:ny=y+1/i/i;end y4.4s=0;for i=1:5s=s+factor(i);end s4.5sum=0;i=1;while sum<2000 sum=sum+i;i=i+1;end;n=i-2 4.6jcsum(63)jcsum1(63)4.1 for m=100:999m1=fix(m/100);m2=rem(fix(m/10),10);m3=rem(m,10);if m==m1*m1*m1+m2*m2*m2+m3*m3*m3disp(m)end end 4.3 y=0;n=100;for i=1:ny=y+1/i/i;end y 4.4 s=0;for i=1:5s=s+factor(i);end s 4.5sum=0;i=1;while sum<2000sum=sum+i;i=i+1;end;n=i-2 4.6i=0;k=0;while i<=63k=k+2^i;i=i+1;end k ii=0;k=0;for i=0:63k=k+2^i;end i k第五章functionf=fxyz(u)x=u(1);y=u(2);z=u(3);f=x+y.^2./x/4+z.^2./y+2./z;5.1A=[2,1,-5,1;1,-5,0,7;0,2,1,-1;1,6,-1,-4];b=[13,-9,6,0]';x=Ab5.2[U,fmin]=fminsearch('fxyz',[0.5,0.5,0.5])5.3X=linspace(0,2*pi,50);Y=sin(X);P=polyfit(X,Y,3)AX=linspace(0,2*pi,50);Y=sin(X);Y1=polyval( P,X)plot(X,Y,':O',X,Y1,'-*')5.4x=0:2.5:10;h=[0:30:60]';T=[95,14,0,0,0;88,48,32,12,6;67,64,54,48,41];xi=[0:0.5:10];hi= [0:10:60]';temps=interp2(x,h,T,xi,hi,'cubic');mesh(xi,hi,temps);5.1 A=[2,1,-5,1;1,-5,0,7;0,2,1,-1;1,6,-1,-4];b=[13,-9,6,0]';x=Ab 5.3X=linspace(0,2*pi,50);Y=sin(X);P=polyfit(X,Y,3)AX=linspace(0,2*p i,50);Y=sin(X);Y1=polyval(P,X)plot(X,Y,':O',X,Y1,'-*')6.1syms x y=finverse(1/tan(x))6.2syms x yf=1/(1+x^2);g=sin(y);fg=compose(f,g)6.3syms xg=(exp(x)+x*sin(x))^(1/2);dg=diff(g)6.4F=int(int('x*exp(-x*y)','x'),'y')6.5syms xF=ztrans(x*exp(-x*10))6.6a=[0 1;-2-3];syms sinv(s*eye(2)-a);6.7 f=solve('a*x^2+b*x+c')6.8 f=solve('x+y+z=1','x-y+z=2','2*x-y-z=1')6.9y=dsolve('D2y+2*Dy+2*y=0','y(0)=1','Dy(0)=0')ezplot(y), grid on6.10a=maple('simplify(sin(x)^2+cos(x)^2);')6.11f=maple('laplace(exp(-3*t)*sin(t),t,s);')6.12 syms t xF=sin(x*t+2*t);L=laplace(F)第七章function[sys,x0,str,ts]=ww(t,x,u,flag)%¶¨ÒåÁ¬ÐøϵͳµÄSº¯Êý A=[0,1;-0.4,-0.2];B=[0;0.2];C=[1,0];D=0;switch flag, case 0,[sys,x0,str,ts]=mdlInitializeSizes(A,B,C,D);case 1,sys=mdlDerivatives(t,x,u,A,B,C,D);case 2,sys=mdlUpdate(t,x,u);case 3,sys=mdlOutputs(t,x,u,A,B,C,D);case 4,sys=mdlGetTimeOfNextVarHit(t,x,u);case 9,sys=mdlTerminate(t,x,u);otherwiseerror(['Unhandled flag = ',num2str(flag)]);end%=============================== function [sys,x0,str,ts]=mdlInitializeSizes(A,B,C,D)sizes = simsizes;sizes.NumContStates = 2;sizes.NumDiscStates = 0;sizes.NumOutputs = 1;sizes.NumInputs = 1;sizes.DirFeedthrough = 1;sizes.NumSampleTimes = 1;sys = simsizes(sizes);x0 = [0;0];str = [];ts = [0 0];%=============================== function sys=mdlDerivatives(t,x,u,A,B,C,D)sys = A*x+B*u;%===============================function sys=mdlUpdate(t,x,u)sys = [];%=============================== functionsys=mdlOutputs(t,x,u,A,B,C,D)sys = C*x+D*u;%=============================== function sys=mdlGetTimeOfNextVarHit(t,x,u)sampleTime = 1;sys = t + sampleTime;%===============================function sys=mdlT erminate(t,x,u)sys = [];7.17.27.37.47.57.67.7第八章8.1num=[5];den=[1,2,2];sys=tf(num,den)8.1.2s = tf('s');H = [5/(s^2+2*s+2)];H.inputdelay =28.1.3h=tf([0.5,0],[1,-0.5,0.5],0.1)8.2num=2*[1,0.5];den=[1,0.2,1.01];sys=tf(num,den)[z,p,k]=tf2zp(num,den);zpk(z,p,k)[A,B,C,D]=tf2ss(num,den);ss(A,B,C,D)8.3 num=[1,5];den=[1,6,5,1];ts=0.1;sysc=tf(num,den);sysd=c2d(sysc,ts,'tustin')8.4.08.4.1 %¶Ôϵͳ·½¿òͼÿ¸ö»·½Ú½øÐбàºÅ,ÓÐ8¸öͨµÀ,ÁÐдÿ¸öͨµÀ´«µÝº¯Êý r1=1;r2=2;c1=3;c2=4;G1=r1;G2=tf(1,[c1,0]);G3=1;%ÊÇ·ÖÀëµãºÍ»ãºÏµãµÄÁ¬Ïß,²»Äܺϲ¢,´«º¯Îª1 G4=-1;G5=1/r2;G6=tf(1,[c2,0]);G7=-1;G8=-1;%½¨Á¢ÎÞÁ¬½ÓµÄ״̬¿Õ¼äÄ£ÐÍG=append(G1,G2,G3,G4,G5,G6,G7,G8)%д³öϵͳµÄÁ¬½Ó¾ØÕóQ=[1 4 0 %ͨµÀ1µÄÊäÈëÊÇͨµÀ4 2 1 7 %ͨµÀ2µÄÊäÈëÊÇͨµÀ1,7 3 2 02 0 53 8 6 5 0 7 5 060];%¸ººÅÔÚ´«º¯ÖÐÌåÏÖ %ÁгöϵͳµÄ×ܵÄÊäÈëºÍÊä³ö¶ËµÄ±àºÅinputs=1;outputs=6;%Éú³É×éºÏºóϵͳµÄ״̬¿Õ¼äÄ£ÐÍsys=connect(G,Q,inputs,outputs)8.4.2r1=1;r2=2;c1=3;c2=4;[A,B,C,D]=linmod('x84');[num,den ]=ss2tf(A,B,C,D);sys=tf(num,den)8.5A=[1,1,0;0,1,0;0,0,2];B=[0,0;1,0;0,-2];n=size(A)Tc=ctrb(A,B);if n==rank(T c)disp('ϵͳÍêÈ«ÄÜ¿Ø');elsedisp('ϵͳ²»ÍêÈ«ÄÜ¿Ø');end 第九章function [rtab,info]=routh(den)info=[];vec1=den(1:2:length(den));nrT=length(vec1);vec2=den(2:2:length(den)-1);rtab=[vec1;vec2,zeros(1,nrT-length(vec2))];for k=1:length(den)-2, alpha(k)=vec1(1)/vec2(1);for i=1:length(vec2),a3(i)=rtab(k,i+1)-alpha(k)*rtab(k+1,i+1);endif sum(abs(a3))==0 a3=polyder(vec2);info=[info,'All elements in row ',...int2str(k+2)' are zeros;'];elseif abs(a3(1))info=[info,'Replaced first element;'];endrtab=[rtab;a3, zeros(1,nrT-length(a3))];vec1=vec2;vec2=a3;end9.1num=[2,5,1];den=[1,2,3];bode(num,den);grid on;figure;nyquist(num,den);9.2num=5*[1,5,6];den=[1,6,10,8];step(num,den);gridon;figure;impulse(num,den);grid on;9.3kosi=0.7;wn=6;num=wn^2;den=[1,2*kosi*wn,wn^2];step(num,den);grid on;figure;impulse(num,den);gridon;9.4den=[1,2,8,12,20,16,16];[rtab,info]=routh(den)a=rtab(:,1) if all(a>0)disp('ϵͳÊÇÎȶ¨µÄ');elsedisp('ϵͳÊDz»Îȶ¨µÄ');end9.5num=7*[1,5];den=conv([1,0,0],conv([1,10],[1,1]));[gm,pm,wg,wc]=margin(num,den)9.1 >> sys=tf([2,5,1],[1,2,3])Transfer function: 2 s^2 + 5 s + 1---------------s^2 + 2 s + 3>> rlocus(sys)>> nyquist(sys)>> bode(sys)9.2>> G=tf(conv([5],[1,5,6]),[1,6,10,8]);>> step(G)>> impulse(G) sys=tf([5,25,30],[1,6,10,8]);>> step(sys)>> impulse(sys)9.4>> GH=tf(conv([7],[1,5]),conv([1,0,0],conv([1,10],[1,1])));>> [Gm,Pm,Wcg,Wcp]=margin(GH)Gm =0 Pm =-47.2870 Wcg =0 Wcp = 1.4354 >>GH=tf(conv([7],[1,5]),conv([1,0,0],conv([1,10],[1,1])));>>[Gm,Pm,Wcg,Wcp]=margin(GH)GH_close=feedback(GH,1)step( GH_close),grid on Gm =0 Pm =-47.2870 Wcg =0 Wcp =1.4354 第十章function s=bpts2s(bp,ts,delta)kosi=sqrt(1-1./(1+((1./pi).*log(1./bp)).^2));wn=-log(delta.*sqrt(1-kosi.^2))/(kosi.*ts);s=-kosi.*wn+j.*wn.*sqrt(1-kosi.^2);function[ngc,dgc]=fa_lead(ng0,dg0,Pm,wc,w)ngv=polyval(ng0,j*wc);dgv=polyval(dg0,j*wc);g=ngv/dgv;thetag=angle(g);mg=abs(g);thetar=Pm*pi/180;tz=(1+mg*cos(thetar-thetag))/(-wc*mg*sin(thetar-thetag));tp=(cos(thetar-thetag)+mg)/(wc*sin(thetar-thetag));ngc=[tz,1];dgc=[tp,1];function[ngc,dgc]=fg_lag_pm(ng0,dg0,w,Pm)[mu,pu]=bode(ng0,dg0,w);wgc=spline(pu,w,Pm+5-180);%²åÖµÇóÈ¡Âú×ãÏà½ÇÔ£¶ÈµÄ½ÇƵÂÊ×÷ΪÆÚÍûµÄ¼ôÇÐƵÂÊngv=polyval(ng0,j*wgc);dgv=polyval(dg0,j*wgc);g=ngv/dgv;alph=abs(1/g);T=10/alph*wgc, ngc=[alph*T,1];dgc=[T,1];function[ngc,dgc]=fg_lag_wc(ng0,dg0,w,wc)ngv=polyval(ng0,j*wc);dgv=polyval(dg0,j*wc);g=ngv/dgv;alph=abs(1/g);T=10/(alph*wc);ngc=[alph*T,1];dgc=[T,1];function[ngc,dgc]=fg_lead_pd(ng0,dg0,wc)ngv=polyval(ng0,j*wc);dg v=polyval(dg0,j*wc);g=ngv/dgv;mg0=abs(g);t=sqrt(((1/mg0)^2-1)/(wc^2));%·ùÖµÏà¼ÓΪÁãngc=[t,1];dgc=[1];%Gc(s)=1+Tsfunction[ngc,dgc]=fg_lead_pm(ng0,dg0,Pm,w)[mu,pu]=bode(ng0,dg0,w);%¼ÆËãÔ-ϵͳµÄ¶ÔÊýƵÂÊÏìÓ¦Êý¾Ý[gm,pm,wcg,wcp]=margin(mu,pu,w);%ÇóÈ¡Ô-ϵͳµÄÏà½ÇÔ£¶ÈºÍ¼ôÇÐƵÂÊalf=ceil(Pm-pm+5);%¼ÆËã¿ØÖÆÆ÷ÌṩµÄ×î´ó³¬Ç°½Ç¶È£¬phi=(alf)*pi/180;%½«×î´ó³¬Ç°½Çת»»Îª»¡¶Èµ¥Î»a=(1+sin(phi))/(1-sin(phi));%¼ÆËãaÖµdbmu=20*log10(mu);%ϵͳµÄ¶ÔÊý·ùÖµmm=-10*log10(a);%wm´¦µÄ¿ØÖÆÆ÷¶ÔÊý·ùÖµwgc=spline(dbm u,w,mm);%²îÖµÇóÈ¡wm£¬ÈÏΪwm£½wcT=1/(wgc*sqrt(a));%¼ÆËãTngc=[a*T,1];dgc=[T,1];function[ngc,dgc]=fg_lead_pm_wc(ng0,dg0,Pm,wc,w)[mu,pu]=bode(ng0,dg0,w);ngv=polyval(ng0,j*wc);dgv=poly val(dg0,j*wc);g=ngv/dgv;%ÇóÔ-ϵͳÔÚÆÚÍûµÄ¼ôÇÐƵÂÊ´¦µÄƵÂÊÏìÓ¦Êý¾ÝG0(jwc) theta=180*angle(g)/pi;%Ô-ϵͳÔÚÆÚÍûµÄ¼ôÇÐƵÂÊ´¦µÄÏà½ÇÔ£¶È£¬µ¥Î»Îª¶Èalf=ceil(Pm-(theta+180)+5);%×î´ó³¬Ç°½Ç phi=(alf)*pi/180;a=(1+sin(phi))/(1-sin(phi));dbmu=20*log10(mu);mm=-10*log10(a);wgc=spline(dbmu,w,mm);T=1/(wgc*sqrt(a));KK=128;s1=-2+i*2*sqrt(3);a=2ng0=[10];dg0=conv([1,0],conv([1,2],[1,8]));g0=tf(ng0,dg0);[ngc,dgc,k]=rg_lag(ng0,dg0,KK,s1,a);gc=tf(ngc,dgc)function s=kw2s(kosi,wn)s=-kosi.*wn+j*wn.*sqrt(1-kosi.^2);10.1ng0=[1];dg0=10000*[1 0-1.1772];g0=tf(ng0,dg0);%Âú×㿪»·ÔöÒæµÄΪУÕýϵͳµÄ´«µÝº¯Êýs=kw2s(0.7,0.5)%ÆÚÍûµÄ±Õ»·Ö÷µ¼¼«µãngc=rg_lead(ng0,dg0,s);gc=tf(ngc,1)g0c=tf(g0*gc);rlocus(g0 ,g0c);b1=feedback(g0,1);%δУÕýϵͳµÄ±Õ»·´«µÝº¯Êýb2=feedback(g0c,1);%УÕýºóϵͳµÄ±Õ»·´«µÝº¯Êýfigure,step(b1,'r--',b2,'b');gridon %»æÖÆУÕýÇ°ºóϵͳµÄµ¥Î»½×Ô¾KK=20;s1=-2+i*sqrt(6);a=1ng0=[10];dg0=conv([1,0],[1,4]);g0=tf(ng0,dg0);[ngc,dgc,k]=rg_lag(ng0,dg0,KK,s1,a);gc=tf(ngc,dgc)g0c=tf(K K*g0*gc);b1=feedback(k*g0,1);b2=feedback(g0c,1);step(b1,'r--',b2,'b');grid ong0c=tf(KK*g0*gc);rlocus(g0,g0c);b1=feedback(k*g0,1);b2=feedback(g0c,1);figure,step(b1,'r--',b2,'b');grid onng0=[1];dg0=conv([1,0,0],[1,5]);g0=tf(ng0,dg0);w=logspace (-3,3);KK=1;Pm=50;[ngc,dgc]=lead4(ng0,dg0,KK,Pm,w);gc=tf(ngc,dgc);g0c=tf(KK*g0*gc);bode(KK*g0,w);holdon,bode(g0c,w);grid on,hold off [gm,pm,wcg,wcp]=margin(g0c)Kg=20*log10(gm)g1=feedback( g0c,1);bode(g1),grid on, [mag,phase,w]=bode(g1);a=find(mag<=0.707*mag(1));wb=w(a( 1))max(mag)b=find(mag==max(mag))wr=w(b)KK=40;Pm=50;ng0= KK *[1];dg0=conv([1,0],conv([1,1],[1,4]));g0=tf(ng0,dg0);w=logspace(-2,4);[ngc,dgc]=fg_lead_pm(ng0,dg0,Pm,w)gc=tf(ngc,dgc),g0c=tf(g0*gc);b1=feedback(g0,1);b2=feedback(g0c,1);step(b1,'r--', b2,'b');grid on figure, bode(g0,'r--',g0c,'b',w), grid on,[gm,pm,wcg,wcp]=margin(g0c), Km=20*log10(gm) KK=200;bp=0.3;ts=0.7;delta=0.05;ng0=[1];dg0=conv([1,0],conv([0.1,1],conv([0.021],conv([0.01,1],[0.005 1]))));g0=tf(ng0,dg0);w=logspace(-4,3);t=[0:0.1:3];[mag,phase]=bode(KK*g0,w);[gm0,pm0,wg0,wc0] =margin(mag,phase,w),gm0=20*log10(gm0)%gm0 =-15.6769 %2¡¢È·¶¨ÆÚÍûµÄ¿ª»·´«µÝº¯Êý mr=0.6+2.5*bp;wc=ceil((2+1.5*(mr-1)+2.5*(mr-1)^2)*pi/ts), h=(mr+1)/(mr-1)w1=2*wc/(h+1), w2=h*w1 w1=wc/10;w2=25;ng1=[1/w1,1];dg1=conv([1/w2,1],conv([1,0],[1 ,0]));g1=tf(ng1,dg1);g=polyval(ng1,j*wc)/polyval(dg1,j*wc);K=abs(1/g);%¼ôÇÐƵÂÊ´¦·ùֵΪ1£¬ÇóKÖµ g1=tf(K*g1)%3¡¢È·¶¨·´À¡»·½Ú´«µÝº¯Êýh=tf(dg1,ng1);Kh=1/K;h=tf(Kh*h)%ÆÚÍûƵÂÊÌØÐԵĵ¹ÌØÐÔ%4¡¢ÑéËãÐÔÄÜÖ¸±êg2=feedback(KK*g0,h);%УÕýºó£¬ÏµÍ³µÄ¿ª»·´«µÝº¯Êýb1=feedback(KK*g0,1);b2=feedback(g2,1);bode(KK*g0,'r--',g2,'b',h,'g',w);grid onfigure,step(b1, 'r--',b2, 'b',t);grid on,[pos,tr,ts,tp]=stepchar(b2,delta)function[ngc,dgc]=lag2(ng0,dg0,w,KK,Pm)[mu,pu]=bode(KK*ng0,dg 0,w);wgc=spline(pu,w,Pm+5-180),ngv=polyval(KK*ng0,j*wgc);dgv=polyval(dg0,j*wgc);g=ngv/dgv;alph=abs(1/g), T=10/alph*wgc, ngc=[alph*T,1];dgc=[T,1];function[ngc,dgc]=lead4(ng0,dg0,KK,Pm,w)[mu,pu]=bode(KK*ng0,d g0,w);[gm,pm,wcg,wcp]=margin(mu,pu,w);alf=ceil(Pm-pm+5);phi=(alf)*pi/180;a=(1+sin(phi))/(1-sin(phi)), dbmu=20*log10(mu);mm=-10*log10(a);wgc=spline(dbmu,w,mm), T=1/(wgc*sqrt(a)),ngc=[a*T,1];dgc=[T,1];function[ngc,dgc]=ra_lead(ng0,dg0,s1)ngv=polyval(ng0,s1);dgv=pol yval(dg0,s1);g=ngv/dgv;thetag=angle(g);mg=abs(g);thetas=ang le(s1);ms=abs(s1);tz=(sin(thetas)-mg*sin(thetag-thetas))/(mg*ms*sin(thetag));tp=-(mg*sin(thetas)+sin(thetag+thetas))/(ms*sin(thetag));ngc=[tz,1]; dgc=[tp,1];function[ngc,dgc,k]=rg_lag(ng0,dg0,KK,s1,a)ngv=polyval(ng0,s1);dgv=polyval(dg0,s1);g=dgv/ngv;k=abs(g);%ÆÚÍûÖ÷µ¼¼«µã´¦µÄ¸ù¹ì¼£ÔöÒæ beta=k/KK;[kosi1,wn1]=s2kw(s1);zc=-wn1*sin(a*pi/180)/sin(pi-atan(sqrt(1-kosi1^2)/kosi1)-(a*pi/180));%ÀûÓÃÕýÏÒ¶¨Àí pc=beta*zc;ngc=beta*[1,-zc];dgc=[1,-pc];functionvarargout=rg_lead(ng0,dg0,s1)if nargout==1ngv=polyval(ng0,s1);dgv=polyval(dg0,s1);g=ngv/dgv;thetal=pi-angle(g);zc=real(s1)-imag(s1)/tan(thetal);t=-1/zc;varargout{1}=[t,1];elseif nargout==2 ngv=polyval(ng0,s1);dgv=polyval(dg0,s1);g=ngv/dgv;theta=angle(g);phi=angle(s1);if theta>0 phi_c=pi-theta;endif theta<0;phi_c=-thetaendtheta_z=(phi+phi_c)/2;theta_p=(phi-phi_c)/2;z_c=real(s1)-imag(s1)/tan(theta_z);p_c=real(s1)-imag(s1)/tan(theta_p);nk=[1-z_c];varargout{2}=[1-p_c];kc=abs(p_c/z_c);if theta<0 kc=-kcendvarargout{1}=kc*nk;elseerror('Êä³ö±äÁ¿ÊýÄ¿²»ÕýÈ·£¡');endfunction [bp,ts]=s2bpts(s,delta)[kosi,wn]=s2kw(s);bp=exp(-kosi.*pi./sqrt(1-kosi.^2));ts=-1./(kosi.*wn)*log(delta.*sqrt(1-kosi.^2));function[kosi,wn]=s2kw(s)kosi=1./sqrt(1+(imag(s)/real(s)).^2);wn=-real(s)./kosi;%Èç¹ûwnΪ¸ºÖµ£¬ÔòwnÈ¡Õý£¬²¢ÇÒkosiÈ¡·´iwn=(wn<0);wn(iwn)=-wn(iwn);kosi(iwn)=-kosi(iwn);function[pos,tr,ts,tp]=stepchar(g0,delta)[y,t]=step(g0);[mp,ind]=max(y);dimt=length(t);yss=y(dimt);pos=100*(mp-yss)/yss;tp=t(ind);for i=1:dimtif y(i)>=1 tr=t(i);break;end end;for i=1:length(y)ify(i)<=(1-delta)*yss|y(i)>=(1+delta)*yss ts=t(i);end end第十一章11.1a=[0 1 0;0 0 1;-1-5-6];b=[0 0 1]';p=[-2+4j;-2-4j;-10];K=acker(a,b,p)eig(a-b*K)11.2a=[0 1 0;0 0 1;-6-11-6];b=[1,0,0]';p=[-2+2*sqrt(3)*j;-2-2*sqrt(3)*j;-10];K=acker(a,b,p)eig(a-b*K)11.6A=[-1 0 0;0-2-3;0 0-3];B=[1 0;2 3;-3-3];C=[1 0 0;1 1 1 ];[G,K,L]=decoupling(A,B,C)11.8A=[0 20.6;1 0];b=[0 1]';c=[0 1];d=0;G=ss(A,b,c,d);Q=diag([1,0,0,0,0]);R=1;p=[-1.8+2.4j;-1.8-2.4j];[k,P]=lqr(A,b,Q,R);l=(acker(A',c',p))' Gc=-reg(G,k,l);zpk(Gc), eig(Gc.a), t=0:0.05:2;G_1=feedback(G*Gc,1);a1=eig(G_1.a), y_1=step(G_1,t);第十二章function[t,xx]=diffstate(G,H,x0,u0,N,T)xk=x0;u=u0;t=0 for k=1:N xk=G*xk+H*u;x(:,k)=xk;t=[t,k*T];end;xx=[x0,x];12.1function sys=M601(t,x)u=1;sys=[x(2);x(3);-800*x(1)-80*x(2)-24*x(3)+u];function[t,y]=ode4(A,B,C,D,x0,h,r,v,t0,tf)Ab=A-B*v*C;B=B;C=C;x=x0';y=0;t=t0;N=round((tf-t0)/h);for i=1:N k1=Ab*x+B*r;k2=Ab*(x+h*k1/2)+B*r;k3=Ab*(x+h*k2/2)+B*r;k4=Ab*(x+h *k3)+B*r;x=x+h*(k1+2*k2+2*k3+k4)/6;y=[y,C*x];t=[t,t(i)+h];end 12.1tspan=[0,10];x0=[0,0,0]';[t,y]=ode45('M601',tspan,x0);y1=800*y(:,1);plot(t,y1);12.2 num=10;den=conv([1,0],conv([1,2],[1,3]));[A,B,C,D]=tf2ss(num,den);x0=[0,0,0];v=1;t0=0;tf=10;h=0.01; r=1;[t,y]=ode4(A,B,C,D,x0,h,r,v,t0,tf);plot(t,y),grid12.3 12.4 g=[-2.8-1.4 0 0;1.4 0 0 0;-1.8-0.3-1.4-0.6;0 0 0.6 0];h=[1 0 1 0]';c=[0 0 0 1];d=0;x0=[0 0 0 0]';u=1;N=30;T=0.1;[t,xx]=diffstate(g,h,x0,u,N,T);plot(t,xx);y=c*xx;figurestairs(t,y)grid on12.6 第十四章14.1clear all;load optcar.mat;t=signals(1,:);p=signals(2,:);v=signals(3,:);a=signals(4,:);theta =signals(5,:);subplot(4,1,1);plot(t,p);gridon;ylabel('λÖÃ(m)');subplot(4,1,2);plot(t,v);gridon;ylabel('ËÙ¶È(m/s)');subplot(4,1,3);plot(t,a);gridon;ylabel('¼ÓËÙ¶È(m/s2)');subplot(4,1,4);plot(t,theta);gridon;ylabel('½Ç¶È(¶È)');14.1clear all loadcar.mat %½«µ¼Èëµ½car.matÖеķÂÕæʵÑéÊý¾Ý¶Á³ö t=signals(1,:);x=signals(2,:);theta=signals(3,:);x1=signals(4,:);thet a1=signals(5,:);plot(t,x,t,x1);ylabel('С³µÎ»ÖÃ(m)'),grid on;%»æÖÆ¿ØÖÆÁ¦×÷ÓÃϽüËÆÄ£Ðͺ;«È·Ä£ÐÍxµÄµ¥Î»½×Ô¾ÏìÓ¦ÇúÏß figure % »æÖÆ¿ØÖÆÁ¦×÷ÓÃϽüËÆÄ£Ðͺ;«È·Ä£ÐÍthetaµÄµ¥Î»½×Ô¾ÏìÓ¦ÇúÏßplot(t,theta,t,theta1);ylabel('°Ú½ÇÖµ(rad)'),grid on;第二篇:控制系统的MATLAB仿真与设计课后答案第二章1>>x=[15 22 33 94 85 77 60] >>x(6)>>x([1 3 5])>>x(4:end)>>x(find(x>70))2>>T=[1-2 3-4 2-3];>>n=length(T);>>TT=T';>>for k=n-1:-1:0 >>B(:,n-k)=TT.^k;>>end >>B >>test=vander(T)3>>A=zeros(2,5);>>A(:) =-4:5 >>L=abs(A)>3 >>islogical(L)>>X=A(L)4>>A=[4,15,-45,10,6;56,0,17,-45,0] >>find(A>=10&A<=20)5>>p1=conv([1,0,2],conv([1,4],[1,1 ]));>>p2=[1 0 1 1];>>[q,r]=deconv(p1,p2);>>cq='商多项式为';cr='余多项式为';>>disp([cq,poly2str(q,'s')]),disp([cr,poly2str(r,'s')])6>>A=[11 12 13;14 15 16;17 18 19];>>PA=poly(A)>>PPA=poly2str(PA,'s')第三章1>>n=(-10:10)';>>y=abs(n);>>plot(n,y,'r.','MarkerSize',20)>>axisequal >>grid on>>xlabel('n')2>>x=0:pi/100:2*pi;>>y=2*exp(-0.5*x).*sin(2*pi*x);>>plot(x,y),gridon;3>>t=0:pi/50:2*pi;>>x=8*cos(t);>>y=4*sqrt(2)*sin(t);>>z=-4*sqrt(2)*sin(t);>>plot3(x,y,z,'p');>>title('Line in 3-D Space');>>text(0,0,0,'origin');>>xlabel('X'),ylable('Y'),zlable('Z');gr id;4>>theta=0:0.01:2*pi;>>rho=sin(2*theta).*cos(2*theta);>>po lar(theta,rho,'k');5>>[x,y,z]=sphere(20);>>z1=z;>>z1(:,1:4)=NaN ;>>c1=ones(size(z1));>>surf(3*x,3*y,3*z1,c1);>>holdon >>z2=z;>>c2=2*ones(size(z2));>>c2(:,1:4)=3*ones(size(c2(:,1 :4)));>>surf(1.5*x,1.5*y,1.5*z2,c2);>>colormap([0,1,0;0.5,0,0;1,0,0 ]);>>grid on >>hold off第四章1>>for m=100:999 m1=fix(m/100);m2=rem(fix(m/10),10);m3=rem(m,10);ifm==m1*m1*m1+m2*m2*m2+m3*m3*m3 disp(m)end end M文件:function[s,p]=fcircle(r)s=pi*r*r;p=2*pi*r;主程序:[s,p]=fcircle(10)3>>y=0;n=100;for i=1:n y=y+1/i/i;end >>y M文件:function f=factor(n)if n<=1 f=1;elsef=factor(n-1)*n;end主程序:>>s=0;for i=1:5 s=s+factor(i);end >>s5>>sum=0;i=1;while sum<2000 sum=sum+i;i=i+1;end;>>n=i-26 for循环M文件:function k=jcsum(n)k=0;for i=0:n k=k+2^i;end主程序: >>jcsum(63)While循环M文件: function k=jcsum1(n)k=0;i=0;while i<=n k=k+2^i;i=i+1;end主程序:>>jcsum1(63)第五章1>>A=[2,1,-5,1;1,-5,0,7;0,2,1,-1;1,6,-1,-4];>>b=[13,-9,6,0]';>>x=Ab M文件:functionf=fxyz(u)x=u(1);y=u(2);z=u(3);f=x+y.^2./x/4+z.^2./y+2./z;主程序:[U,fmin]=fminsearch('fxyz',[0.5,0.5,0.5])3>>X=linspace(0,2*p i,50);>>Y=sin(X);>>P=polyfit(X,Y,3)>>AX=linspace(0,2*pi,50);>>Y=sin(X);>>Y1=polyval(P,X)>>plot(X,Y,':O',X,Y1,'-*')4>>x=0:2.5:10;>>h=[0:30:60]';>>T=[95,14,0,0,0;88,48,32,12,6; 67,64,54,48,41];>>xi=[0:0.5:10];>>hi=[0:10:60]';>>temps=interp 2(x,h,T,xi,hi,'cubic');>>mesh(xi,hi,temps);第六章1>>syms x>>y=finverse(1/tan(x))2>>syms x y>>f=1/(1+x^2);g=sin(y);>>fg=compose(f,g)3>>syms x>>g=(exp(x)+x*sin(x))^(1/2);>>dg=diff(g)4>>F=int(int('x*e xp(-x*y)','x'),'y')5>>syms x>>F=ztrans(x*exp(-x*10))6>>a=[0 1;-2-3];>>syms s>>inv(s*eye(2)-a);7>>f=solve('a*x^2+b*x+c')8>>f=solve('x+y+z=1','x-y+z=2','2*x-y-z=1')9>>y=dsolve('D2y+2*Dy+2*y=0','y(0)=1','Dy(0)=0')>>ezpl ot(y),grid on10>>a=maple('simplify(sin(x)^2+cos(x)^2);')11>>f=maple(' laplace(exp(-3*t)*sin(t),t,s);')12>>syms t x>>F=sin(x*t+2*t);>>L=laplace(F)第七章第八章1-1>>h=tf([5,0],[1,2,2])1-2>>s = tf('s');>>H = [5/(s^2+2*s+2)];>>H.inputdelay =2 1-3>>h=tf([0.5,0],[1,-0.5,0.5],0.1)2>>num=2*[1,0.5];den=[1,0.2,1.01];>>sys=tf(num,d en)>>[z,p,k]=tf2zp(num,den);>>zpk(z,p,k)>>[A,B,C,D]=tf2ss(nu m,den);>>ss(A,B,C,D)3 >>num=[1,5];den=[1,6,5,1];ts=0.1;>>sys c=tf(num,den);>>sysd=c2d(sysc,ts,'tustin')>>r1=1;r2=2;c1=3;c2=4;>>[A,B,C,D]=linmod('x84');>>[num ,den]=ss2tf(A,B,C,D);>>sys=tf(num,den)5>>A=[1,1,0;0,1,0;0,0,2]; B=[0,0;1,0;0,-2];>>n=size(A)>>Tc=ctrb(A,B);if n==rank(Tc)disp('系统完全能控');elsedisp('系统不完全能控');end第九章1>>num=[2,5,1];den=[1,2,3];>>bode(num,den);grid on;>>figure;>>nyquist(num,den);2>>num=5*[1,5,6];den=[1,6,1 0,8];>>step(num,den);gridon;>>figure;>>impulse(num,den);gridon;3>>kosi=0.7;wn=6;>>num=wn^2;den=[1,2*kosi*wn,wn^2]; >>step(num,den);grid on;>>figure;>>impulse(num,den);grid on;4 M文件:function[rtab,info]=routh(den)info=[];vec1=den(1:2:length(den));nrT=len gth(vec1);vec2=den(2:2:length(den)-1);rtab=[vec1;vec2,zeros(1,nrT-length(vec2))];for k=1:length(den)-2, alpha(k)=vec1(1)/vec2(1);for i=1:length(vec2), a3(i)=rtab(k,i+1)-alpha(k)*rtab(k+1,i+1);endif sum(abs(a3))==0 a3=polyder(vec2);info=[info,'All elements in row ',...int2str(k+2)' are zeros;'];elseif abs(a3(1)) rtab=[rtab;a3, zeros(1,nrT-length(a3))];vec1=vec2;vec2=a3;end主程序:>>den=[1,2,8,12,20,16,16];>>[rtab,info]=routh(den)>>a=rt ab(:,1)if all(a>0)disp('系统是稳定的');elsedisp('系统是不稳定的');end5>>num=7*[1,5];den=conv([1,0,0],conv([1,10],[1,1]));>>[gm ,pm,wg,wc]=margin(num,den)第十章 M文件:。
matlab语言与控制系统仿真参考答案第1章
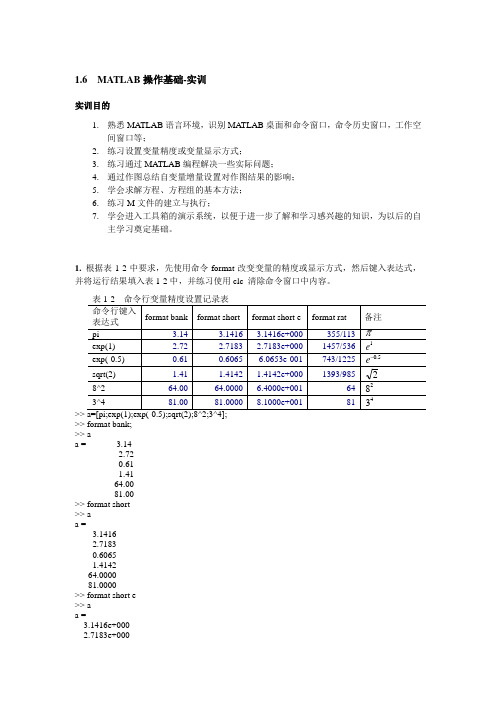
1.6 MATLAB操作基础-实训实训目的1.熟悉MATLAB语言环境,识别MATLAB桌面和命令窗口,命令历史窗口,工作空间窗口等;2.练习设置变量精度或变量显示方式;3.练习通过MATLAB编程解决一些实际问题;4.通过作图总结自变量增量设置对作图结果的影响;5.学会求解方程、方程组的基本方法;6.练习M文件的建立与执行;7.学会进入工具箱的演示系统,以便于进一步了解和学习感兴趣的知识,为以后的自主学习奠定基础。
1.根据表1-2中要求,先使用命令format改变变量的精度或显示方式,然后键入表达式,并将运行结果填入表1-2中,并练习使用clc 清除命令窗口中内容。
>> format bank;>> aa = 3.142.720.611.4164.0081.00>> format short>> aa =3.14162.71830.60651.414264.000081.0000>> format short e>> aa =3.1416e+0002.7183e+0006.0653e-001 1.4142e+000 6.4000e+001 8.1000e+001 >> format rat >> a a =355/113 1457/536 743/1225 1393/985 64 812. 编写MA TLAB 程序计算,根据程序运算结果填空(要求保留两位小数)(1)58.135.0+=-ea =( 4.29 ); 程序为: a=exp(-0.5)+sqrt(13.58)>> format bank;>> a=exp(-0.5)+sqrt(13.58) a =4.29(2)已知两个圆的半径分别为cm 5.31=r , cm 62=r ,则两个圆的周长分别为=1l ( 21.99 )cm, =2l ( 37.70 )cm;面积分别为=1s ( 38.48 )2cm ,=2s ( 113.10 )2cm程序:>> format bank; >> r=[3.5 6]; >> [2*pi*r;pi*r.*r]提示:圆的周长计算公式为:r L π2=,圆的面积2r S π=,其中r 为圆的半径。
【免费下载】控制系统的MATLAB仿真与设计课后答案
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根通保据过护生管高产线中工敷资艺设料高技试中术卷资,配料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高与中带资负料荷试下卷高问总中题体资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况中卷下,安与要全过加,度强并工看且作护尽下关可都于能可管地以路缩正高小常中故工资障作料高;试中对卷资于连料继接试电管卷保口破护处坏进理范行高围整中,核资或对料者定试对值卷某,弯些审扁异核度常与固高校定中对盒资图位料纸置试,.卷保编工护写况层复进防杂行腐设自跨备动接与处地装理线置,弯高尤曲中其半资要径料避标试免高卷错等调误,试高要方中求案资技,料术编试交写5、卷底重电保。要气护管设设装线备备置敷4高、调动设中电试作技资气高,术料课中并3中试、件资且包卷管中料拒含试路调试绝线验敷试卷动槽方设技作、案技术,管以术来架及避等系免多统不项启必方动要式方高,案中为;资解对料决整试高套卷中启突语动然文过停电程机气中。课高因件中此中资,管料电壁试力薄卷高、电中接气资口设料不备试严进卷等行保问调护题试装,工置合作调理并试利且技用进术管行,线过要敷关求设运电技行力术高保。中护线资装缆料置敷试做设卷到原技准则术确:指灵在导活分。。线对对盒于于处调差,试动当过保不程护同中装电高置压中高回资中路料资交试料叉卷试时技卷,术调应问试采题技用,术金作是属为指隔调发板试电进人机行员一隔,变开需压处要器理在组;事在同前发一掌生线握内槽图部内 纸故,资障强料时电、,回设需路备要须制进同造行时厂外切家部断出电习具源题高高电中中源资资,料料线试试缆卷卷敷试切设验除完报从毕告而,与采要相用进关高行技中检术资查资料和料试检,卷测并主处且要理了保。解护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
控制系统的Matlab仿真与设计课后答案
end
end
4.2[s,p]=fcircle(10)
4.3y=0;n=100;
fori=1:n
y=y+1/i/i;
end
y
4.4s=0;
fori=1:5
s=s+factor(i);
end
s
4.5sum=0;i=1;
whilesum<2000
sum=sum+i;
i=i+1;
end;
n=i-2
y=2*exp(-0.5*x).*sin(2*pi*x);
plot(x,y),grid on;
3.3
t=0:pi/50:2*pi;
x=8*cos(t);
y=4*sqrt(2)*sin(t);
z=-4*sqrt(2)*sin(t);
plot3(x,y,z,'p');
title('Line in 3-D Space');
text(0,0,0,'origin');
xlabel('X'),ylable('Y'),zlable('Z');grid;
3.4
theta=0:0.01:2*pi;
rho=sin(2*theta).*cos(2*theta);
polar(theta,rho,'k');
3.5
[x,y,z]=sphere(20);
fg=compose(f,g)
6.3symsx
g=(exp(x)+x*sin(x))^(1/2);
Y=sin(X);
P=polyfit(X,Y,3)
MATLAB仿真课后习题答案
MATLAB仿真课后习题答案第一章1.要求在闭区间[0,2Π]上产生具有10个等间距采样点的一维数组。
试用两种不同的指令实现。
解答:方法1:a=0:2*pi/9:2*pi方法2:a1=linspace(0,2*pi,10)4.任意建立矩阵A,然后找出在[10,20]区间的元素的位置。
解答:A=[4,15,-45,10,6;56,0,17,-45,0]A =4 15 -45 10 656 0 17 -45 0>> find(A>=10&A<=20)ans =367第二章M文件的2种形式:命令文件和函数文件。
命令文件没有输入输出参数,执行时只需在命令窗口中键入文件名回车即可;而函数文件是一条以function语句作为引导。
即文件的第一行为function[返回参数1,返回参数2,…]=函数名(输入参数1,输入参数2,…)。
这一行的有无是区分命令文件与函数文件的重要标志。
函数文件可以接受输入变量,还可以返回输出变量,执行时需在命令窗口中以固定格式调用函数方可。
习题22-1.编写程序,建立向量N=[1,2,3,4,5],然后利用向量N产生下列向量:(1) 2,4,6,8,10(2) 1/2, 1, 3/2, 2, 5/2(3) 1, 1/2, 1/3, 1/4, 1/5(4) 1, 1/4, 1/9, 1/16, 1/25解答:>> N1=2*N >> N2=N/2 >> N3=1./N >> N4=1./N.^22-2从键盘输入一个3位数的整数,将它反向输出。
如输入639,输出936。
输入一个百分制成绩,要求输出成绩等级A、B、C、D、E。
其中90~100分为A,80~89分为B,70~79分为C,60~69分为D,60分以下为E。
要求:(1)分别用if语句和switch语句实现。
(2)输入百分制成绩后要判断该成绩的合理性,对不合理的成绩应输出出错信息。
MATLAB语言与控制系统仿真_参考答案解析_第6章
>> [nc,dc]=cloop(no,do);
>> sys=cloop(no,do)
sys =
0 0 20
>> sys=tf(nc,dc)
Transfer function:
20
------------------
s^2 + 5 s + 20
>> t=0:0.01:20;
ylabel('截止频率');
title('截止频率与阻尼比关系曲线');
grid;
subplot(3,1,2);
plot(z,gama);
ylabel('相角裕量');
title('相角裕量与阻尼比关系曲线');
grid;
subplot(3,1,3);
plot(z,wb);
ylabel('带宽频率');
(2)
>> n=10;
>> d=conv([1,0],conv([1,1],[10,1]));
>> sys=tf(n,d)
Transfer function:
10
------------------------
10 s^3 + 11 s^2 + s
>> margin(sys)
由图上信息可知,幅值裕度为-19.2dB,相角裕度为-34.3度。
图6-14系统的开环传递函数为:
仿真程序为:
n=2;
d=conv([1,0],[0.1,1]);
syso=tf(n,d);
MATLAB语言与控制系统仿真-参考答案-第5章

5.6 控制系统的时域响应MATLAB 仿真实训5.6.1实训目的 1. 学会利用MATLAB 绘制系统的单位阶跃响应曲线,掌握读取系统动态性能指标的方法; 2. 学会利用MATLAB 绘制系统的单位脉冲响应曲线的方法; 3. 掌握利用MATLAB 绘制系统的零输入响应曲线的方法; 4. 掌握利用MATLAB 绘制系统的一般输入响应曲线的方法;5.学会通过仿真曲线读取相关信息,并依据有关信息进行系统的时域分析。
5.6.2实训内容1.编写程序求取下列各系统的单位阶跃响应,完成表5-5并记录相关曲线。
162.316)(21++=s s s G 164.216)(22++=s s s G 166.116)(23++=s s s G 1616)(24++=s s s G 解:>> n1=16;>> d1=[1,3.2,16]; >> sys1=tf(n1,d1); >> step(sys1)>> n2=16;>> d2=[1,2.4,16]; >> sys2=tf(n2,d2); >> step(sys2)>> n3=16;>> d3=[1,1.6,16]; >> sys3=tf(n3,d3); >> step(sys3)>> n4=16;>> d4=[1,1,16]; >> sys4=tf(n4,d4); >> step(sys4)w=4;cmax1=1+exp(-z1*pi/sqrt(1-z1^2)); tp1=pi/(w*sqrt(1-z1^2));ts1=3.5/(z1*w);[cmax1,tp1,ts1]ans =1.2538 0.85692.1875 >> z2=0.3;w=4;cmax2=1+exp(-z2*pi/sqrt(1-z2^2)); tp2=pi/(w*sqrt(1-z2^2));ts2=3.5/(z2*w);[cmax2,tp2,ts2]ans =1.3723 0.82332.9167 >> z3=0.2; w=4;cmax3=1+exp(-z3*pi/sqrt(1-z3^2)); tp3=pi/(w*sqrt(1-z3^2)); ts3=3.5/(z3*w); [cmax3,tp3,ts3]ans =1.5266 0.8016 4.3750 >> z4=0.125; w=4;cmax4=1+exp(-z4*pi/sqrt(1-z4^2)); tp4=pi/(w*sqrt(1-z4^2)); ts4=3.5/(z4*w); [cmax4,tp4,ts4] ans =1.6731 0.7916 7.0000说明:对于二阶欠阻尼系统(10<<ξ),若系统的闭环传递函数为2222)(nn ns s s Φωξωω++= 则系统单位阶跃响应的输出最大值21max 1ξξπ--+=ec峰值时间21ξωπ-=n p t调整时间估算值ns t ξω5.3= (以5%为误差带) ns t ξω4.4=(以2%为误差带)2.已知二阶系统的闭环传递函数如下,编程求取系统的单位阶跃响应并完成表5-6,记录相关曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统的MATLAB 仿真与设计课后答
案
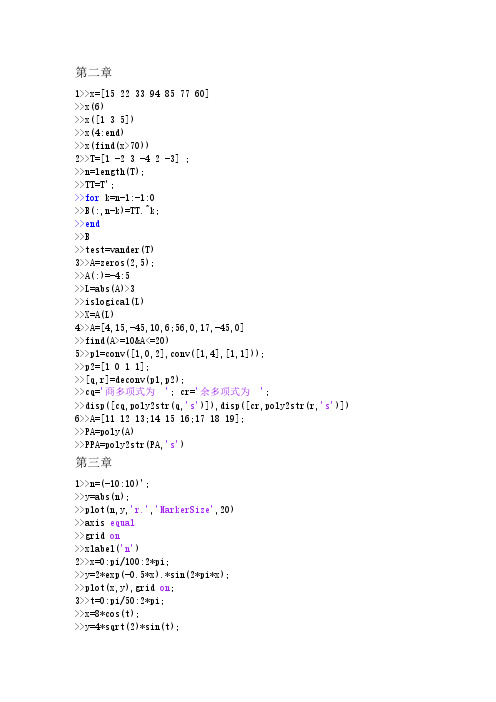
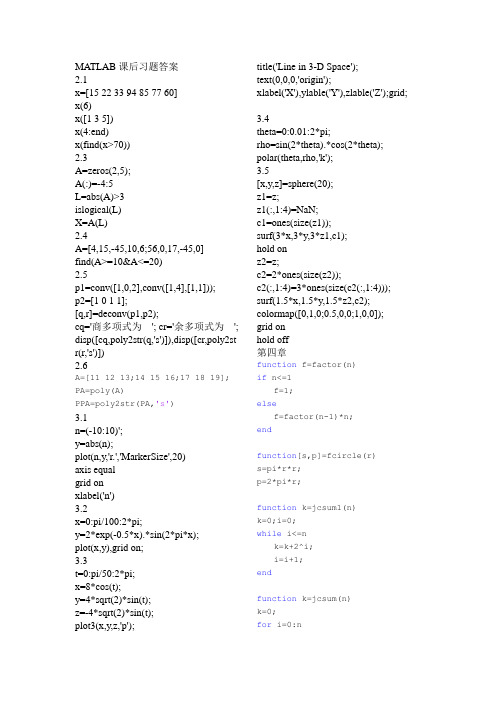
第二章
1>>x=[15 22 33 94 85 77 60]
>>x(6)
>>x([1 3 5])
>>x(4:end)
>>x(find(x>70))
2>>T=[1 -2 3 -4 2 -3] ;
>>n=length(T);
>>TT=T';
>>for k=n-1:-1:0
>>B(:,n-k)=TT.^k;
>>end
>>B
>>test=vander(T)
3>>A=zeros(2,5);
>>A(:)=-4:5
>>L=abs(A)>3
>>islogical(L)
>>X=A(L)
4>>A=[4,15,-45,10,6;56,0,17,-45,0] >>find(A>=10&A<=20)
5>>p1=conv([1,0,2],conv([1,4],[1,1]));
>>p2=[1 0 1 1];
>>[q,r]=deconv(p1,p2);
>>cq='商多项式为 '; cr='余多项式为 ';
>>disp([cq,poly2str(q,'s')]),disp([cr,poly2str(r,'s')]) 6>>A=[11 12 13;14 15 16;17 18 19];
>>PA=poly(A)
>>PPA=poly2str(PA,'s')
第三章
1>>n=(-10:10)';
>>y=abs(n);
>>plot(n,y,'r.','MarkerSize',20)
>>axis equal
>>grid on
>>xlabel('n')
2>>x=0:pi/100:2*pi;
>>y=2*exp(-0.5*x).*sin(2*pi*x);
>>plot(x,y),grid on;
3>>t=0:pi/50:2*pi;
>>x=8*cos(t);
>>y=4*sqrt(2)*sin(t);
>>z=-4*sqrt(2)*sin(t);
>>plot3(x,y,z,'p');
>>title('Line in 3-D Space');
>>text(0,0,0,'origin');
>>xlabel('X'),ylable('Y'),zlable('Z');grid;
4>>theta=0:0.01:2*pi;
>>rho=sin(2*theta).*cos(2*theta); >>polar(theta,rho,'k');
5>>[x,y,z]=sphere(20);
>>z1=z;
>>z1(:,1:4)=NaN;
>>c1=ones(size(z1));
>>surf(3*x,3*y,3*z1,c1);
>>hold on
>>z2=z;
>>c2=2*ones(size(z2));
>>c2(:,1:4)=3*ones(size(c2(:,1:4))); >>surf(1.5*x,1.5*y,1.5*z2,c2);
>>colormap([0,1,0;0.5,0,0;1,0,0]); >>grid on
>>hold off
第四章
1>>for m=100:999
m1=fix(m/100);
m2=rem(fix(m/10),10);
m3=rem(m,10);
if m==m1*m1*m1+m2*m2*m2+m3*m3*m3 disp(m)
end
end
2M文件:
function[s,p]=fcircle(r)
s=pi*r*r;
p=2*pi*r;
主程序:
[s,p]=fcircle(10)
3>>y=0;n=100;
for i=1:n
y=y+1/i/i;
end
>>y
4 M文件:
function f=factor(n)
if n<=1
f=1;
else
f=factor(n-1)*n; end
主程序:
>>s=0;
for i=1:5
s=s+factor(i);
end
>>s
5>>sum=0;i=1;
while sum<
sum=sum+i;
i=i+1;
end;
>>n=i-2
6for循环M文件:function k=jcsum(n) k=0;
for i=0:n
k=k+2^i;
end
主程序:
>>jcsum(63)
While循环M文件:
function k=jcsum1(n)
k=0;i=0;
while i<=n
k=k+2^i;
i=i+1;
end
主程序:
>>jcsum1(63)
第五章
1>>A=[2,1,-5,1;1,-5,0,7;0,2,1,-1;1,6,-1,-4]; >>b=[13,-9,6,0]';
>>x=A\b
2M文件:
function f=fxyz(u)
x=u(1);y=u(2);z=u(3);
f=x+y.^2./x/4+z.^2./y+2./z;
主程序:
[U,fmin]=fminsearch('fxyz',[0.5,0.5,0.5]) 3>>X=linspace(0,2*pi,50);。