分拣单元的结构与控制
自动线分拣单元控制系统设计(毕业论文doc)之欧阳理创编

摘要本课题主要运用气动控制技术、机械技术(机械传动、机械连接等)、传感器应用技术、PLC控制技术以及变频器技术等专业核心课程展开自动线分拣单元控制系统设计。
分拣单元是自动生产线的最后一单元,是整条生产线中不可缺少的自动生产设备,它靠气动传动,依靠气缸等执行元件推动物料,在控制系统中起着举足轻重的作用,而控制运行的PLC系统要求也越来越高,要求达到系统运行的“稳”、“准”、“快”的运行目的。
该系统主要由PLC、逻辑控制电路组成,其中包括交流电机、变频器、传感器和笔形气缸组成为一体的自动控制系统。
本机控制单元采用三菱公司的PLC对机器进行全过程控制,其控制系统结构简单,运行效率高,易于理解与掌握。
关键词:PLC 交流电机变频器编码器传感器目录摘要 (Ⅰ)第一章绪论 (1)第二章可编程控制器的概述 (3)2.1 PLC的基本概念 (3)2.1.1 PLC的特点 (3)2.1.2 PLC的发展阶段 (5)2.2 PLC的分类与应用及前景 (6)2.2.1 PLC的分类 (6)2.2.2 可编程控制器PLC的应用与前景 (7)2.3 可编程控制器的几种编程语言 (9)2.3.1 梯形图编程语言 (9)2.3.2 功能块图编程语言 (10)2.4 传感器的概述 (10)2.4.1 磁性传感器的工作原理 (11)2.4.2 电感式接近开关的工作原理 (11)2.4.3 光电式接近开关的工作原理 (12)2.4.4 光纤传感器的工作原理 (13)2.4.5 金属传感器的工作原理 (14)2.4.6 电磁换向阀的工作原理 (14)2.5 气动装置的概述 (15)2.5.1 气泵的认识与选择 (15)2.5.2 空气压缩机 (16)2.5.3 储气罐 (17)2.5.4 压力控制阀 (17)2.5.5 辅助元件 (17)2.5.6 气动执行元件 (18)第三章材料分拣装置硬件系统 (20)3.1 基本功能及控制要求 (20)3.2 系统的结构设计 (20)3.3 材料分拣装置的组成及各部的功能 (21)第四章PLC硬件设计 (24)4.1 PLC选型 (24)4.2 I/O地址分配 (24)4.3 I/O连接图 (25)第五章PLC软件设计 (26)5.1 程序流程图 (26)5.2 梯形图及说明 (27)5.3 PLC指令 (29)第六章控制系统的调试 (30)6.1 硬件调试 (30)6.2 软件调试 (30)6.3 整体调试 (30)结论........................................................... ..32致谢........................................................... ..33参考文献 (34)附录一...........................................................35附录二...........................................................36第一章绪论随着科学技术的发展,工业自动化程度的不断提高,市场竞争的激烈,传统的人工分拣生产效率低,成本高,企业竞争力差,已经无法满足现代化生产的需要。
分拣单元及简化学习程序编辑-FX2NPLC
FROM用于从特殊功能模块缓冲存储器(BFM) 中读入数据。将模块号为m1的特殊功能模块内,从缓冲存 储器(BFM)号为m2开始的n个数据读入PLC,并存放在 从D开始的n个数据寄存器中。
信号来 源
装置侧
按钮/指 示灯模 块
序号
1 2 3 4 5 6 7 8 9 10 11
输出点 Y000 Y001
Y004 Y005 Y006 Y007 Y010 Y011
输出信号 信号名称 STF RH
推杆1电磁阀 推杆2电磁阀 推杆3电磁阀
HL1 HL2 HL3
输出目标 变频器 变频器
按钮/指 示灯模块
1 B 1 1 B 2 2 B 1 2 B 2
S C 1 S C 2
S C 3
S C 4
S B 2
S B 1 Q S
S A
I 2
I 3
I 4
I 5
I 6
I 7
I 8
I 9
C O M 2 4 + X 0 0 0X 0 0 1X 0 0 2X 0 0 3X 0 0 4X 0 0 5X 0 0 6X 0 0 7X 0 1 0X 0 1 1X 0 1 2X 0 1 3 X 0 1 4X 0 1 5X 0 1 6 X 0 1 7
1、设备的工作目标、上电和气源接通后的初始 位置,具体的分拣要求,均与原工作任务相同,启 停操作和工作状态指示,不通过按钮指示灯盒操作 指示,而是在触摸屏上实现。
2、当传送带入料口人工放下已装配的工件时, 变频器即启动,驱动传动电动机以触摸屏给定的速 度,把工件带往分拣区。频率在40—50HZ可调节。
分拣单元的结构与控制

8.3 西门子MM420变频器
利用基本操作面板(BOP)可以改变变频器的各个参数。为 了利用BOP设定参数,必须首先拆下SDP,装上BOP。
BOP具有7段显示的五位数字,可以显示参数的序号和数值, 报警和故障信息,以及设定值和实际值。参数的信息不能用 BOP 存储。表8-3表示BOP 操作时的工厂缺省设置值。
者用于判断滑槽中存放的工件是否已满槽。 该装置在工作时采用的逻辑是:当传感器接收反射光线时,
传感器输出信号为0;当在传感器主体与反光镜之间有不透明 的物体存在时,光被阻断,传感器不能接收到反射光线,则 传感器输出信号为1。
8.1.3 气动控制回路
上一页 下一页 返回
8.1 分拣单元的结构
该工作单元的执行机构是气动控制系统,其方向控制阀的控 制方式为电磁控制或手动控制。各执行机构的逻辑控制功能 是通过PLC控制实现的。
8.2.4 分拣单元的装配图和参考本地控制 程序
1. 装配图
上一页 下一页 返回
8.2 分拣单元的PLC控制及编程
描图
描校 底图号 装订号
英集斯自动化 技术有限公司
装配工序卡
产品型号
传送带被动轮 安装
产品名称
车间
制造部
班组
工步
工步内容
1
用M6×14螺钉附弹平垫片将两块对称的传送带端板分别安装在型材两边。
使用BOP面板操作变频器的前提条件是:P0010=0(为了正 确地进行运行命令的初始化);P0700=1(使能BOP 操作板 上的启动/停止按钮);P1000=1(使能电动电位计的设定 值)。
8.3.3 MM420变频器的参数设置
变频器的参数只能用基本操作面板(BOP),高级操作面板 (AOP)或者通过串行通信接口进行修改。
第六章分拣单元的结构与控制
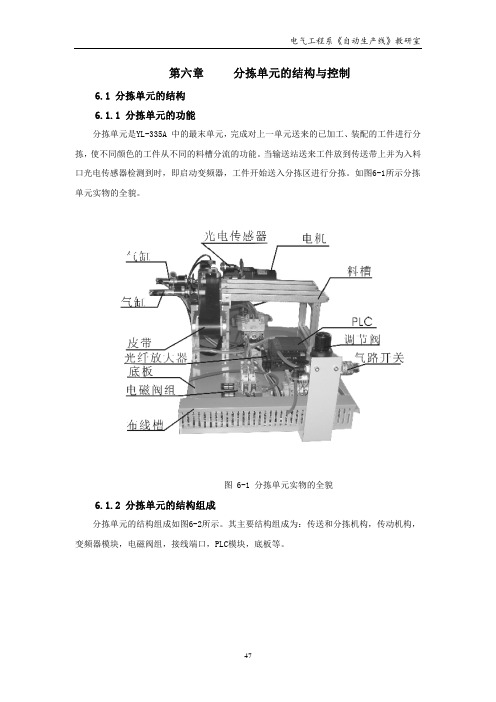
第六章 分拣单元的结构与控制6.1 分拣单元的结构6.1.1 分拣单元的功能分拣单元是YL-335A 中的最末单元,完成对上一单元送来的已加工、装配的工件进行分拣,使不同颜色的工件从不同的料槽分流的功能。
当输送站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区进行分拣。
如图6-1所示分拣单元实物的全貌。
图 6-1 分拣单元实物的全貌6.1.2 分拣单元的结构组成分拣单元的结构组成如图6-2所示。
其主要结构组成为:传送和分拣机构,传动机构,变频器模块,电磁阀组,接线端口,PLC模块,底板等。
图 6-2 分拣单元的主要结构组成1、传送和分拣机构传送和分拣机构如图6-3 所示。
传送已经加工、装配好的工件,在光纤传感器检测到并进行分拣。
它主要由传送带、物料槽、推料(分拣)气缸、漫射式光电传感器、光纤传感器、磁感应接近式传感器组成。
图 6-3 传送和分拣机构传送带是把机械手输送过来加工好的工件进行传输,输送至分拣区。
导向件是用纠偏机械手输送过来的工件。
两条物料槽分别用于存放加工好的黑色工件和白色工件。
传送和分拣的工作原理:本站的功能是完成从装配站送来的装配好的工件进行分拣。
当输送站送来工件放到传送带上并为入料口漫射式光电传感器检测到时,将信号传输给PLC,通过PLC 的程序启动变频器,电机运转驱动传送带工作,把工件带进分拣区,如果进入分拣区工件为白色,则检测白色物料的光纤传感器动作,作为1 号槽推料气缸启动信号,将白色料推到1 号槽里,如果进入分拣区工件为黑色,检测黑色的光纤传感器作为2 号槽推料气缸启动信号,将黑色料推到2 号槽里。
自动生产线的加工结束。
在每个料槽的对面都装有推料(分拣)气缸,把分拣出的工件推到对号的料槽中。
在两个推料(分拣)气缸的前极限位置分别装有磁感应接近开关,在PLC 的自动控制可根据该信号来判别分拣气缸当前所处位置。
当推料(分拣)气缸将物料推出时磁感应接近开关动作输出信号为“1”,反之,输出信号为“0”。
分拣单元教案
分拣单元教案教案标题:分拣单元教案教案目标:1. 学生能够理解分拣的概念,并能够将物品根据特定的标准进行分类和分拣。
2. 学生能够运用逻辑思维和判断力,解决分拣过程中的问题。
3. 学生能够培养团队合作和沟通能力,通过合作完成分拣任务。
教学重点:1. 理解分拣的概念和意义。
2. 掌握物品分类和分拣的方法。
3. 培养团队合作和沟通能力。
教学难点:1. 培养学生的逻辑思维和判断力。
2. 促进学生的团队合作和沟通能力。
教学准备:1. 分拣物品(例如:颜色、形状、大小等不同特征的小玩具或图片)。
2. 分类标准(例如:颜色、形状、大小等)。
3. 分拣容器(例如:不同颜色或标签的盒子)。
4. 讲解PPT或白板。
教学过程:引入(5分钟):1. 利用图片或实物引入分拣的概念,向学生解释分拣的意义和应用场景。
2. 引导学生思考,为什么我们需要进行分拣?探究(15分钟):1. 将分拣物品放在桌上,让学生观察并尝试找出它们的共同特征。
2. 讨论学生的观察结果,引导学生提出不同的分类标准。
3. 介绍几种常见的分类标准,例如颜色、形状、大小等。
4. 分组让学生根据不同的分类标准进行分拣,并将物品放入相应的容器中。
5. 引导学生思考,不同分类标准对分拣结果的影响。
总结(10分钟):1. 回顾学生的分拣结果,让学生讨论各种分类标准的优缺点。
2. 引导学生总结出适合不同场景的分类标准。
3. 强调团队合作和沟通在分拣过程中的重要性。
拓展(15分钟):1. 提供更复杂的分拣任务,要求学生根据多个分类标准进行分拣。
2. 引导学生思考,如何优化分拣过程,提高效率和准确性。
3. 鼓励学生自主设计分拣任务,并邀请其他小组进行分拣。
作业:布置一个分拣任务,要求学生根据自己设计的分类标准,将家中的物品进行分拣,并写一份反思报告,包括分拣过程中遇到的问题和解决方法。
评估:观察学生在分拣任务中的表现,评估他们的分类准确性、团队合作和沟通能力。
教学延伸:1. 引导学生了解分拣在实际生活中的应用,例如快递分拣、垃圾分类等。
分拣单元的结构与控制

⑵将所编程序下载到CPU中,进行实际运营调试,经过调 试修改旳过程,最终完善控制程序,实现控制功能。
3.措施与提议
⑴在下载、运营程序前,必须仔细检验程序。在检验程 序时,要点检验:各个执行机构之间是否会发生冲突, 同一种执行机构在不同旳阶段所作旳相同旳动作是否 区别开了。
⑵在调试程序时,使用程序编辑器中旳【Monitor】工具 对调试旳程序进行监视,观察程序旳执行状态,经过 该工具并结合观察到旳设备执行状态,能够很以便地 分析出程序中旳问题。
10.2.3 分拣单元旳自动连续运营控制
1.控制任务
在自动操作模式下,在各执行机构处于初始状态旳 情况下,当按下开启按钮后,设备便被开启,首先是传 送带开启运转,当第一种工件从左端被放到传送带上时, 导向气缸1推出,使工件从第一种滑槽中分流出去;当第 二个工件被放上时,导向气缸1不动,导向气缸2推出, 使工件从第二个滑槽中分流出去;当第三个工件被放上 时,导向气缸1和导向气缸2都不动,则工件被固定导向 块导入到第三个滑槽中。至此,一种工作循环结束。当 继续向传送带上放置工件时,则按照上述过程重新旳循 环,直至按下了停止按钮。
①操作手单元旳初始状态可设计为:
➢导向气缸1处于退回旳位置; ➢导向气缸2处于退回旳位置; ➢传送带处于停止状态;
②工艺流程
开始
是否满足开启条件
N
且是否为手动模式?
Y
是否按下了
N
开启按钮?
Y ①
①
开启传送带
⑤
是否有工件
N
放在传送带
上?
Y
第一种
N
工件吗?
加工自动生产线三工位分拣单元的自动化设计
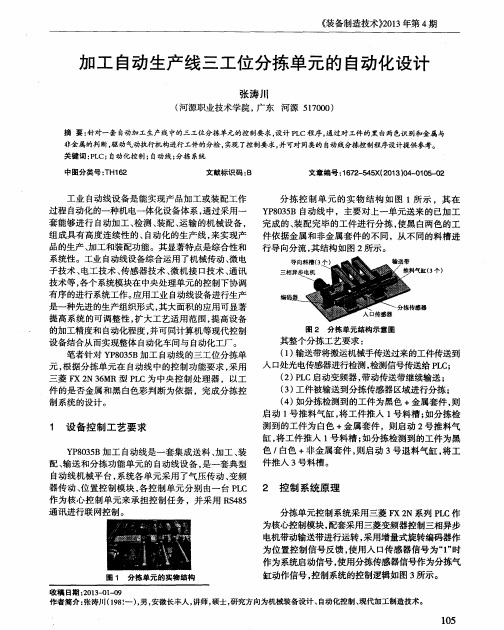
工业 自动线设备是能实现产品加 工或装配工作 过程 自 动化的一种机电一体化设备体系, 通过采用一 套能够进行 自动;  ̄ I - r 、 检测 、 装配 、 运输 的机械设备 , 组成具有高度连续性的 、 自动化的生产线 , 来实现产 品的生产 、 加工和装配功能。其显著特点是综合性和 系统性。工业 自动线设备综合运用 了机械传动 、 微电 子技术 、 电工技术 、 传感器技术 、 微机接 口技术 、 通讯 技术等 , 各个系统模块在中央处理单元 的控制下协调 有序 的进行系统工作。 应用工业 自 动线设备进行生产 是一种先进的生产组织形式 , 其大面积 的应用可显著 提高系统 的可调整性 , 扩大工艺适用范 围, 提高设备 的加工精度和 自 动化程度 , 并可 同计算机等现代控制 设备结合从而实现整体 自 动化车间与 自动化工厂。 笔者 针 对 Y P 8 0 3 5 B加 工 自动 线 的三 工 位分 拣 单 元, 根据分拣单元在 自动线 中的控制功能要求 , 采用 三菱 F X 2 N 3 6 b l R型 P L C为 中央 控制 处 理 器 , 以工 件 的是否金属和黑 白色彩判断为依据 ,完成分拣控 制 系统 的设 计 。
非金属的判断, 驱动气动执行机构进行工件 的分检 , 实现 了控制要 求, 并可对 同类的 自动线分拣控制程序设计提供参考。
关键词 : P L C; 自动化控 制 ; 自动 线; 分拣 系统 中图分类号 : T H 1 6 2 文献标识码 : B 文章编号 : 1 6 7 2 — 5 4 5 X ( 2 0 1 3 ) 0 4 — 0 1 0 5 — 0 2
《 装备制造技术) ) 2 0 1 3 年第 4 期
加工 自动 生产 线三工位分拣单元 的 自动化设计
柔性生产系统——分拣单元PLC控制课题报告

《柔性生产系统(MPS)——分拣单元PLC控制》课题报告一、设计目的:1、控制要求(包括必要的时序):分拣单元的主要作用是将由操作手单元传送来的已加工好的合格品按其不同的材质颜色分别送至三个不同的槽位中。
其初始位置为:挡料缸伸出;导向缸1退回,5B1为ON状态,5B2为OFF状态;导向缸2退回,5B3为ON状态,5B4为OFF状态。
其动作过程为:当操作手单元准备将成品工件放入分拣单元时,首先起动传送带,同时挡料缸伸出,2秒后才放下工件(其目的是为了减小电机的起动力矩),当工件随传送带到达挡料缸时,由工件有无传感器感应到工件到来,即5S1为ON时,接收前方加工单元(或检测单元)传来的工件的材质颜色信息,根据工件的信息,相应的导向缸动作,档料缸缩回,将工件导向其对应的槽位中,要求绿色塑料工件进入1号槽位,银白色金属工件进入2号槽位,黑色塑料工件进入3号槽位,当工件被成功分拣到对应槽位瞬间,工件入槽检测信号5S2为ON(瞬间),同时送出信号%Q00480给加工单元,表示工件已被成功分拣,分拣单元已空可接收下一个工件,2秒后传送带停止,直到下一个工件准备被放入时再次启动传送带。
导向缸1的动作过程:导向缸1初始状态为退回状态,5B1为ON 状态,5B2为OFF状态,当导向气缸1动作时,5B1为OFF,导向气缸1一直动作,直到5B2为ON,导向气缸1停止动作;当工件被分拣后,导向缸1退回,导向气缸释放,5B2为OFF,导向气缸一直释放,直到5B1为ON。
导向缸2的动作与导向缸1相似,其动作限位分别由5B3、5B4控制。
2、课题要求:本课题有如下要求:①由MPS分拣单元的前方单元传来的数字信号(如:R00001-R00010)控制本单元的光纤传感器;②当传送带上有物料时,位于入料口的传感器发出动作,该处档杆动作,拦住倍数送来的物料;③当相应材质颜色的物料移动到对应滑槽口时,该处传感器对推杆发出伸出动作信号,并将物料推向滑槽;(对应的最后一种材质的物料无需由传感器判断并发出动作信号)④当物料由滑槽滑落时,位于滑槽旁的传感器收到信号并反馈给1、2号材质颜色传感器,使相应推杆发出回复动作;⑤要求触摸屏控制,当出现异常情况时能急停和复位,触摸屏上传送带运动反映在电机叶轮转动及物料移动上。
分拣单元的PLC控制程序设计(三)
分拣单元的PLC控制程序设计(三)用线行化语言设计分拣单元控制程序(1)新建线性化编程的分拣单元PLC控制程序项目。
在STEP7管理器中创建一个新项目,插入S7-300PLC的站,完成硬件配置,编制符号表。
⑵设计程序流程图。
在设计程序之前,参照分拣单元的生产工艺流程,设计程序流程图。
(3)在OB1中设计控制程序。
参照程序流程图,用LAD、FBL或STL语言设计分拣单元控制程序。
(4)程序调试。
将所编的程序先进行仿真调试,程序调试无误后,再下载到CPU中进行实际运行调试。
经过调试修改后,最终完善控制程序,实现控制功能。
用模块化编程方法设计分拣单元控制程序(1)新建模块化编程的分拣单元控制程序项目。
在STEP7管理器中创建一个新项目,完成硬件配置,插入相应的程序块,编制符号表。
(2)设计程序流程图。
再设计程序之前,参照分拣单元的生产工艺流程,设计程序流程图。
(3)绘制顺序功能图。
分栋单元各执行机构也按一定的顺序运行,依据顺序流程图可以方便地画出分拣单元的顺序功能图。
将顺序功能图用s7GKAH语言编写在FC或FB中。
(4)OB1主程序设计。
参照程序流程图,在OB1中有条件调用順序控制程序,无条件调用停止、急停程序。
(5)急停、停止程序设计。
急停和停止程序仿照前面其他工作单元的设计思路和方法。
(6)调试程序。
将所编的程序先进行仿真调试,仿真调试的程序无误后,再下载到UCP 中进行实际运行调试。
经过调试修改后,最终完善控制程序,实现控制功能。
腾跃始终致力于青岛生产线、青岛流水线、青岛装配线的设计与研发!。
分拣与存储单元的安装与调试(完整资料).doc

【最新整理,下载后即可编辑】第四章分拣与存储单元的安装与调试4.1 分拣单元的结构4.1.1 分拣与存储单元的元件认知分拣单元是YL-335A中的最末单元,完成对上一单元送来的已加工、装配的工件进行分拣,使不同颜色的工件从不同的料槽分流的功能。
当输送站送来工件放到传送带上并为入料口光电传感器检测到时,即启动变频器,工件开始送入分拣区进行分拣。
如图4-1所示分拣单元实物的全貌。
图4-1分拣单元实物的全貌4.1.2 分拣单元的结构组成分拣单元的结构组成如图4-2所示。
其主要结构组成为:传送和分拣机构,传动机构,变频器模块,电磁阀组,接线端口,PLC模块,底板等。
图4-2分拣单元的主要结构组成1、传送和分拣机构传送和分拣机构如图4-3所示。
传送已经加工、装配好的工件,在光纤传感器检测到并进行分拣。
它主要由传送带、料抖、物料槽、推料(分拣)气缸、漫射式光电传感器、光纤传感器、磁感应接近式传感器组成。
图4-3传送和分拣机构传送带是把机械手输送过来加工好的工件进行传输,输送至分拣区。
料抖是用纠偏机械手输送过来的工件。
两条物料槽分别用于存放加工好的黑色工件和白色工件。
传送和分拣的工作原理:本站的功能是完成从装配站送来的装配好的工件进行分拣。
当输送站送来工件放到传送带上并为入料口漫射式光电传感器检测到时,将信号传输给PLC,通过PLC 的程序使启动变频器,电机运转驱动传送带工作,把工件带进分拣区,如果进入分拣区工件为白色,则检测白色物料的光纤传感器动作,作为1号槽推料气缸启动信号,将白色料推到1号槽里,如果进入分拣区工件为黑色,检测黑色的光纤传感器作为2号槽推料气缸启动信号,将黑色料推到2号槽里。
自动生产线的加工结束。
在每个料槽的对面都装有推料(分拣)气缸,把分拣出的工件推到对号的料槽中。
在两个推料(分拣)气缸的前极限位置分别装有磁感应接近开关,在PLC的自动控制可根据该信号来判别分拣气缸当前所处位置。
当推料(分拣)气缸将物料推出时磁感应接近开关动作输出信号为“1”,反之,输出信号为“0”。
毕业设计(论文)-11yl--335b自动化生产线分拣单元论文设计[管理资料]
![毕业设计(论文)-11yl--335b自动化生产线分拣单元论文设计[管理资料]](https://img.taocdn.com/s3/m/bf4d0224b14e852459fb578a.png)
Abstract
The biggest characteristic of automatic productionline is a comprehensive and itssystem, comprehensive mainly relates to the mechanical technology, microelectronics technology, electrical and electronic technology, sensor technology, interface technology, information transformation technology, network communication technology and other technology organically, and applied to production equipment and systems; that is production line of sensing, processing and transmission, control, execution and driving mechanism in the control of the micro processing unit of work coordinately, organically fuses in together. The system completed the demolition, sorting a work piece, the production process simulation of a production line. First by the feeding station to provide raw materials, transport station will be sent to the processing station for processing, and then sent to the assembly station for installation, and finally by the sorting station sorting.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
将从动轮两端分别安装上轴承619,再整体装入传送带端板之间,调整好位置穿入传送轮销轴,在另一边轴用挡圈卡紧。
3
型材另一端安装同上一样,最后将传送带安放到适当位置。
4
型材两侧(无传送带)须事先埋7颗M6螺母,用于后续部件的安装固定。
5
6
7
MTMPS
模块化 培训系
统
部件图号
部件名称 设备
MT-MPS-J060 传送带模块
M
P
S
-
文件
G
编号
Y
-
0
1
2
第
共3页
1
页
工序工时
装配体 工艺装备 内六角扳手
工时定额 (min)
编制 (日期)
校对 (日期)
审核 (日期)
标准化 (日期)
会签 (日期)
标记
处数
更改文件号
签字
日期
标 记
处数
更改文 件号
签
日
字
期
07.12.27
上一页 下一程
2. 参考本地控制程序
2. 气动控制回路仿真 用FluidSIM-P软件设计制作气动控制和仿真模拟。通过该软
件,学生在计算机上分别画出气动回路图8-1和根据图8-2设 计电气控制回路,然后进行测试和模拟仿真。通过仿真的实 时显示与软件连接的实际控制回路的动作,逐步解决控制回 路中的问题,直到最后实现图8-2要求的控制过程。
上一页 返回
8.3 西门子MM420变频器
8.3.1 MM420变频器简介
西门子MicroMaster420是全新一代模块化设计的多功能标准 变频器。它友好的用户界面,让安装、操作和控制像玩游戏 一样灵活方便。全新的IGBT技术、强大的通信能力、精确的 控制性能和高可靠性都让控制变成一种乐趣。
下一页 返回
8.1 分拣单元的结构
该装置通过传送带及导向装置实现对工件的分拣。它主要由 导向气缸、导向装置、固定导向块组成。当某一工件需要分 拣到第一或第二滑槽中时,对应的导向气缸驱动导向装置将 传送带送来的工件导入相应的滑槽。
3. 反射式光电开关 反射式光电接近开关用于检测是否有工件进入到滑槽中,或
第八章 分拣单元的结构与控制
8.1 分拣单元的结构 8.2 分拣单元的PLC控制及编程 8.3 西门子MM420变频器 8.4 实验操作训练
8.1 分拣单元的结构
8.1.1 分拣单元的功能
分拣工作单元可以实现对工件按照材质或颜色分拣的过程。 可将工件按照颜色分拣到3个滑槽中。
8.1.2 分拣单元的结构组成
分拣工作单元主要由传送带模块、分拣装置、滑槽模块、气 源处理组件、I/O接线端口、阀组、继电器、电容式/漫反射 式传感器和反射式光电传感器等组成。
1. 传送带模块 模块中的传送带由一个直流电流通过齿轮减速器后驱动。当
传送带运行一定时间后,或因其他原因造成传送带打滑时, 可以通过调整传送带模块上的端头支撑板来调整传送带的张 紧度而消除打滑。 2. 分拣装置
图8-1为分拣单元的气动控制原理图,1A为1号导向气缸; 1B1和1B2为磁感应式接近开关;2A为2号导向气缸;2B1、 2B2为磁感应式接近开关;1Y1为1号导向气缸的电磁阀的控 制信号;2Y1为2号导向气缸的电磁阀的电磁控制信号。
上一页 返回
8.2 分拣单元的PLC控制及编程
8.2.1 PLC的I/O接线
按启动按钮,根据工件信息确定滑槽位置,对应导向装置动 作,传送带转动将工件送出直至工件滑入相应滑槽;最后各 导向装置恢复到复位状态。
用“手/自”、“单/联”模拟工件的材质及颜色,方法与操作 手单元的深入练习相同。
2. 编写程序 分拣单元的控制程序框图如图8-2所示,按此框图编写PLC程
序。 3. 下载调试 将编辑好的程序下载到PLC中运行,调试通过,完成控制任
务。
8.2.3 气动控制回路分析及仿真
1. 气动控制回路分析
上一页 下一页 返回
8.2 分拣单元的PLC控制及编程
在图8-1中可知,此单元只有2个气缸,完成工件判断后,推 向导槽中。哪个气缸动作,取决于工件类型判断的结果。如 图是工件该推向1号槽,工件到达后,令1Y1通电,1号气缸 活塞杆推出,工件进入1号槽,活塞杆伸出到位后,1B2有信 号输出,此时1Y1断电,电磁阀在弹簧作用下复位换向,1号 气缸活塞杆缩回,完成一次推工件动作。2号气缸动作与1号 相同。
8.2.4 分拣单元的装配图和参考本地控制 程序
1. 装配图
上一页 下一页 返回
8.2 分拣单元的PLC控制及编程
描图
描校 底图号 装订号
英集斯自动化 技术有限公司
装配工序卡
产品型号
工序号
0
工序名称
1
装配体
传送带被动轮 安装
产品名称
车间
制造部
班组
工步
工步内容
1
用M6×14螺钉附弹平垫片将两块对称的传送带端板分别安装在型材两边。
者用于判断滑槽中存放的工件是否已满槽。 该装置在工作时采用的逻辑是:当传感器接收反射光线时,
传感器输出信号为0;当在传感器主体与反光镜之间有不透明 的物体存在时,光被阻断,传感器不能接收到反射光线,则 传感器输出信号为1。
8.1.3 气动控制回路
上一页 下一页 返回
8.1 分拣单元的结构
该工作单元的执行机构是气动控制系统,其方向控制阀的控 制方式为电磁控制或手动控制。各执行机构的逻辑控制功能 是通过PLC控制实现的。
1. 基本功能参数 西门子MicroMaster420变频器基本功能参数如表8-2所示。 2. 变频器的安装方法 (1)单相电源,此时变频器与电动机、电源的安装方式如图
8-3所示。 (2)三相电源,此时变频器与电动机、电源的安装方式如图
本单元I/O设备的编号与说明见表8-1。
8.2.2 分拣单元的编程要点
1. 控制任务 当设备接通电源与气源、PLC运行后,首先执行复位动作,
各导向气缸驱动的导向装置均缩回到位,传送带无工件。然 后进入工作运行模式,放入一个工件,工作单元读取工件信 息;
下一页 返回
8.2 分拣单元的PLC控制及编程
MPS中的每个部件上的输入、输出信号与PLC之间的通信电 路连接是通过I/O接线端口实现的。
各接口地址已经固定。各单元中的需要与PLC进行通信连接 的线路(包括各个传感器的线路、各个电磁阀的控制线路及 电源线路)都已事先连接到了各自的I/O接线端口上,在与 PLC连接时,只需使用一根专用电缆即可实现快速连接。