cad画缓和曲线方法
在CAD中用样条曲线画缓和曲线
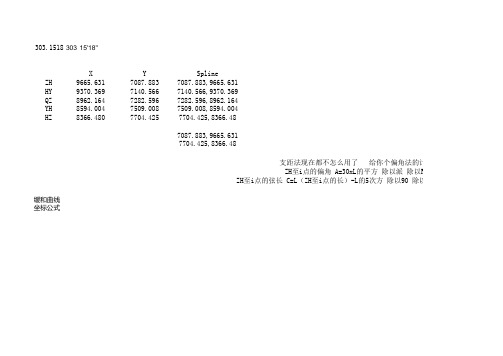
303.1518303°15'18"X Y SplineZH9665.6317087.8837087.883,9665.631HY9370.3697140.5667140.566,9370.369QZ8962.1647282.5967282.596,8962.164YH8594.0047509.0087509.008,8594.004HZ8366.4807704.4257704.425,8366.487087.883,9665.6317704.425,8366.48支距法现在都不怎么用了 给你个偏角法的计算ZH至i点的偏角 A=30xL的平方 除以派 除以R 除以LsZH至i点的弦长 C=L(ZH至i点的长)-L的5次方 除以90 除以R的平方 除以Ls的平方缓和曲线坐标公式X=L-L^5÷[40(RLS)^2]+L^9÷[3456(RLS)^4]–L^13÷[599040(RLS)^6]+L^17÷[175472640(RLS)^8]- L^21÷[7.80337152×1010(RLS)^10]Y=L^3÷[6(RLS)] - L^7÷[336(RLS)^3]+L^11÷[42240(RLS)^5] - L^15÷[9676800(RLS)^7]+L^19÷[3530096640(RLS)^9] - L^23÷[1.8802409472×1012园是C 曲线是SPL 样条曲线或者用 A画弧线(1)将“对象捕捉”中的“节点”选中(2)绘图-----单点-----选中一条线的起始点--------空格------输入距离(输入距离之前一定要先捕捉到第一个点,然后沿着这条线的方向去输入距离)-----空格------输入(3)你在标注的时候那些“点”就会被捕捉到大家多多指教!因为我不大会做动画,所以只能用文字说明,忘大家谅解:1.现做一个CAD脚本,会的人跳过(用Windows 文本另存为“.scr”文件)2.脚本编辑输入“SPLINE+空格键+Y坐标+,+X坐标+空格键+Y坐标+,+X坐标……” 以此类推!点输的越密,线条越平滑。
在CAD中进行曲线绘制的方法

在CAD中进行曲线绘制的方法在CAD软件中进行曲线绘制是一项非常基础却又重要的功能。
本文将介绍一些常用的绘制曲线的方法和技巧,帮助大家更好地使用CAD软件。
首先,我们需要选择合适的绘制工具。
在CAD软件中,一般有多种绘制曲线的工具可供选择,如直线工具、圆弧工具、样条曲线工具等。
根据实际需求,我们可以选择不同的工具来绘制各种类型的曲线。
第一种曲线绘制方法是使用直线工具。
直线工具可以用来绘制直线段,但也可以用来绘制一些简单的曲线。
首先,我们需要选择直线工具,并确定起点和终点。
然后,在确定起点后,我们可以通过在终点前单击并拖动鼠标来创建一个曲线控制点,进而调整曲线的形状。
最后,我们可以再次单击鼠标来确定终点,这样就完成了曲线的绘制。
第二种曲线绘制方法是使用圆弧工具。
圆弧工具可以用来绘制圆弧和弧段。
首先,我们需要选择圆弧工具,并确定圆心和起始点。
然后,通过拖动鼠标来确定圆弧的半径和角度。
最后,我们可以再次单击鼠标来确定终点,这样就完成了圆弧的绘制。
第三种曲线绘制方法是使用样条曲线工具。
样条曲线工具可以用来绘制复杂的曲线。
首先,我们需要选择样条曲线工具,并确定起点。
然后,通过在绘制路径上单击并拖动鼠标来创建曲线控制点,从而调整曲线的形状。
我们可以使用多个控制点来创建复杂的曲线。
最后,我们可以再次单击鼠标来确定终点,这样就完成了样条曲线的绘制。
除了上述的基本绘制方法外,还有一些常用的曲线绘制技巧。
例如,我们可以使用绘制连接工具来将多个曲线连接在一起,形成一个整体。
我们还可以通过调整曲线的节点来改变曲线的形状。
另外,我们可以使用修剪和延伸工具来对曲线进行修剪和延伸操作,以满足实际需求。
在进行曲线绘制时,我们还需注意一些绘图原则。
首先,我们应该保持绘图的准确性和精度,避免出现绘图误差。
其次,我们应该根据实际需求来选择合适的绘制工具和技巧。
最后,我们应该进行适当的编辑和修改,以达到理想的曲线效果。
只有掌握了这些技巧和原则,我们才能更好地进行CAD中的曲线绘制。
CAD里面如何绘制缓和曲线

CAD里面如何绘制缓和曲线
缓和曲线是曲线的一种,我们在CAD中无法直接绘制,没有工具和命令,所以需要下载一个工具。
那么大家知道CAD里面如何绘制缓和曲线吗?下面是小编整理的CAD里面如何绘制缓和曲线的方法,希望能帮到大家!
CAD里面绘制缓和曲线的方法下载一个缓和曲线.LSP工具。
解压下载好的压缩文件,复制解压好的缓和曲线.LSP。
把它拷贝到你的CAD安装包中的support文件中。
加载程序
打开cad,输入加载命令ap。
进入程序加载框,找到CAD安装的位置和support文件夹。
找到缓和曲线.LSP工具,选中它,点击加载。
然后再点击关闭。
绘制曲线
程序加载完成后,就可以绘制缓和曲线了。
根据提供的信息,作出曲线的两条切线。
输入绘制缓和曲线的命令hh,回车。
选择第一条直线,点击第一条切线上任意即可。
选中第二条直线,点击第二条切线任意一点即可。
根据提供的曲线要素,输入曲线的半径,例如本次输入为半径500,回车。
根据提供的曲线要素,输入缓和曲线的长度,例如本次输入的长
度为20,回车。
完成以上步骤后,系统进入自动绘图,稍等片刻,完成绘图。
曲线要素标注
指定曲线要素标注文字的位置。
调整字体的大小,细化它的位置,完成绘制。
运用CAD进行图形平滑和曲线调整的技巧
运用CAD进行图形平滑和曲线调整的技巧CAD(计算机辅助设计)是一种强大的软件工具,可以帮助设计师创建和编辑各种图形。
在CAD中,平滑曲线和调整图形是设计过程中常见的任务。
下面将介绍一些运用CAD进行图形平滑和曲线调整的技巧。
1. 平滑曲线平滑曲线可以使图形更加流畅和美观。
在CAD中,有几种方法可以实现平滑曲线。
方法一:折线平滑选中需要平滑的折线,然后使用“曲线平滑”工具。
这将使折线自动转变为光滑的曲线。
方法二:使用曲线拟合工具使用曲线拟合工具可以将直线和曲线平滑连接起来。
选中需要连接的直线和曲线,然后使用“曲线拟合”工具。
CAD将会自动创建一个平滑的曲线。
方法三:使用曲线编辑工具曲线编辑工具可以手动调整曲线的控制点,使其更加平滑。
选中曲线,然后使用“曲线编辑”工具。
通过拖动控制点来调整曲线的形状和平滑度。
2. 调整图形除了平滑曲线,CAD还提供了一些工具和功能,可以对图形进行细微的调整。
方法一:调整节点选中需要调整的节点,然后使用“节点编辑”工具。
通过移动和删除节点,可以修改图形的形状。
方法二:使用偏移工具偏移工具可以通过平行或垂直于原始图形创建一个新的图形。
选中图形,然后使用“偏移”工具。
输入偏移的距离,并选择偏移的方向,CAD将会自动创建一个新的图形。
方法三:使用对称工具对称工具可以通过对称轴镜像图形的一部分来创建对称图形。
选中图形,然后使用“对称”工具。
输入对称轴,CAD将会自动创建对称的图形。
总结:CAD软件在图形平滑和曲线调整方面提供了多种功能和工具。
通过使用曲线平滑、曲线拟合和曲线编辑工具,可以使曲线更加流畅。
此外,通过节点编辑、偏移和对称工具,可以对图形进行细微的调整。
熟练掌握这些技巧,将帮助设计师创建出更加美观的图形。
cad画缓和曲线方法
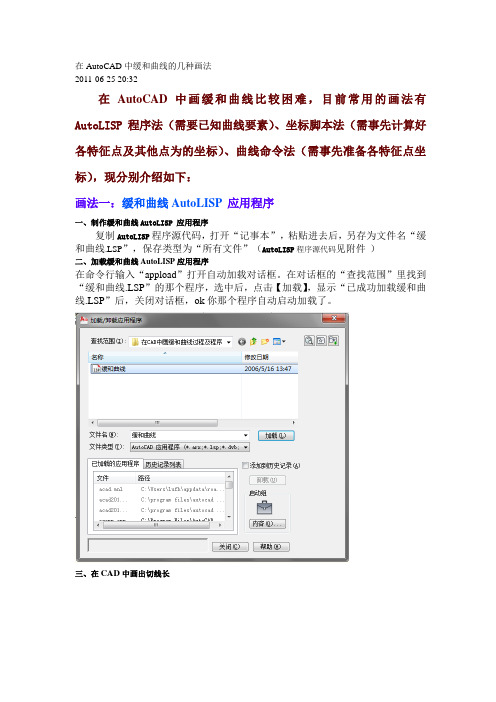
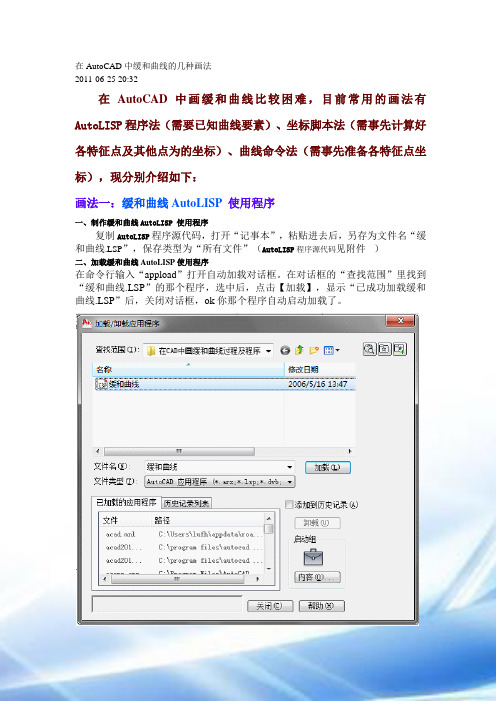
在AutoCAD中缓和曲线的几种画法2011-06-25 20:32在AutoCAD中画缓和曲线比较困难,目前常用的画法有AutoLISP程序法(需要已知曲线要素)、坐标脚本法(需事先计算好各特征点及其他点为的坐标)、曲线命令法(需事先准备各特征点坐标),现分别介绍如下:画法一:缓和曲线AutoLISP 应用程序一、制作缓和曲线AutoLISP 应用程序复制AutoLISP程序源代码,打开“记事本”,粘贴进去后,另存为文件名“缓和曲线.LSP”,保存类型为“所有文件”(AutoLISP程序源代码见附件)二、加载缓和曲线AutoLISP应用程序在命令行输入“appload”打开自动加载对话框。
在对话框的“查找范围”里找到“缓和曲线.LSP”的那个程序,选中后,点击【加载】,显示“已成功加载缓和曲线.LSP”后,关闭对话框,ok你那个程序自动启动加载了。
三、在CAD中画出切线长四、运行程序在命令行中输入hh回车五、选择两条切线,然后输入曲线半径如:2204.5回车六、输入缓和曲线长,如270,绘图完成!画法二:坐标脚本法1.现做一个CAD脚本,会的人跳过(用Windows 文本另存为“.scr”文件)2.脚本编辑输入“SPLINE+空格键+Y坐标+,+X坐标+空格键+Y坐标+,+X坐标……” 以此类推!点输的越密,线条越平滑。
也可以用EXCEL算出各个点的坐标后粘贴进去,然后按照“SPLINE+空格键+Y坐标+,+X坐标+空格键+Y坐标+,+X坐标……”格式编辑。
3.进入CAD,运行脚本,就行了!注意:你可能输入了100个点,而出现的确只有几个点,这个很正常,你把图像删除了,多运行几次就行,一般不超过4次。
画法三:使用真样条曲线命令举例如下:输入导线:pline命令绘制1、2、3各点,其对应坐标如下x1=213.7748 y1=92.1117x2=313.7748 y2=92.1117x3=399.6787 y3=143.3026绘制通过ZH、HZ、QZ、HY和YH各点的与路线导线相切的含缓和曲线的平曲线。
利用CAD进行曲线调整与优化
利用CAD进行曲线调整与优化在设计和工程领域中,CAD(计算机辅助设计)软件被广泛应用于创建和修改各种类型的曲线。
曲线的调整和优化是设计过程中非常关键的一步,它可以确保曲线的平滑性、连续性和准确性。
CAD软件提供了强大的工具和功能,使得曲线的调整和优化变得更加简单和高效。
曲线调整是指通过改变曲线的形状、位置或属性,使其满足特定的设计要求。
例如,在工程设计中,可能需要调整道路的曲线使其符合交通规范;在产品设计中,可能需要调整曲线的形状以提高产品的性能或美观度。
CAD软件提供了多种工具和技巧来完成这些任务。
其中一个常用的曲线调整工具是“修整”功能。
修整允许用户通过添加、删除或移动曲线的控制点来调整曲线的形状。
通过选择适当的控制点并进行相应的操作,可以在保持曲线平滑度的同时,改变曲线的弯曲程度和位置。
另一个常用的曲线调整工具是“拉伸”功能。
拉伸可以通过在曲线上选择一个或多个点,并将它们沿指定方向拉伸,来改变曲线的形状。
这种方法通常用于微调曲线的局部曲率或变换整个曲线的形状。
此外,CAD软件还提供了一些曲线优化工具,用于改进曲线的连续性和光滑度。
其中一个常用的优化工具是“平滑”功能。
平滑允许用户选择曲线上的一组点,并通过自动调整它们的位置和曲率,使曲线更加光滑和连续。
这种工具对于去除曲线中的尖锐角和突变很有帮助,使曲线在视觉上更加流畅。
另一个常用的优化工具是“近似”功能。
近似允许用户选择曲线上的一组点,并通过替换它们为更少数量的控制点,来简化曲线的形状。
这样可以大大减少曲线的复杂性,从而提高计算效率和性能。
除了这些基本的调整和优化工具外,CAD软件还提供了许多高级功能和算法,用于更复杂和精细的曲线调整和优化。
例如,曲线拟合功能可以根据给定的数据点,自动拟合出最符合曲线的函数。
曲线平台化功能可以将曲线转换为一系列直线段或圆弧段,以提高计算和渲染效率。
综上所述,利用CAD进行曲线调整和优化是设计和工程领域中非常重要的一步。
CAD绘制曲线的方法与技巧

CAD绘制曲线的方法与技巧CAD(Computer-Aided Design,计算机辅助设计)软件是现代工程设计中不可或缺的工具之一。
在CAD软件中,绘制曲线是常见且重要的任务。
本文将介绍CAD绘制曲线的方法与技巧,帮助读者更好地掌握这一技能。
首先,我们来了解几种常见的CAD软件中绘制曲线的方法。
1. 画弧(Arc):画弧是绘制曲线最常用的方法之一。
在CAD软件中,选择“画弧”工具,然后选择起始点和终止点,再选择弧的半径或者通过指定圆心和起始点来确定圆弧的形状。
这种方法适用于绘制圆弧、弧线等各种曲线形状。
2. 画样条曲线(Spline):画样条曲线是一种更灵活的曲线绘制方法。
在CAD软件中,选择“画样条曲线”工具,然后选择曲线上的控制点,CAD软件会自动生成曲线,通过调整控制点的位置来改变曲线的形状。
样条曲线适用于绘制自然曲线,如波浪线、弯曲的线条等。
3. 参数方程绘制曲线:一些CAD软件支持通过输入曲线的参数方程来绘制曲线。
在CAD软件中,选择“参数方程”工具,然后输入曲线的参数方程,软件会自动绘制曲线。
这种方法适用于绘制复杂的曲线,如椭圆、双曲线等。
除了以上几种基本的绘制方法外,还有一些绘制曲线的技巧可以帮助提高效率和精度。
1. 使用捕捉功能:CAD软件通常提供了各种捕捉功能,如吸附点、吸附线、吸附圆、吸附曲线等。
在绘制曲线时,可以使用这些捕捉功能来吸附到其他图形元素的节点或边界,帮助保持曲线的对齐和精确度。
2. 使用草图工具:CAD软件通常提供了一些草图工具,如跟随模式、自由草图等。
在绘制曲线时,可以使用这些草图工具来辅助手绘曲线,使曲线更加自然且具有艺术感。
3. 使用曲线编辑工具:CAD软件通常提供了一些曲线编辑工具,如剪切、平滑、过滤等。
在绘制曲线后,可以使用这些编辑工具来微调曲线的形状和细节,使曲线更加理想和符合设计要求。
4. 使用曲线变换功能:CAD软件通常提供了一些曲线变换功能,如拉伸、扩展、旋转等。
利用CAD进行绘制和编辑曲线

利用CAD进行绘制和编辑曲线CAD(计算机辅助设计)是一种强大的工具,广泛应用于各行各业。
在设计过程中,绘制和编辑曲线是非常重要的一环。
以下是一些使用CAD进行曲线绘制和编辑的技巧和教程。
首先,在CAD中绘制曲线时,可以使用不同的命令和工具。
一种常用的方法是使用直线段和曲线段命令。
通过点击鼠标来确定曲线的起点、终点和中间控制点,可以创建平滑的曲线。
另一种方法是使用弧线命令,通过指定半径、起始角和终止角来创建圆弧形状。
还可以使用样条曲线命令来绘制更复杂的曲线形状,例如贝塞尔曲线或样条曲线。
此外,在CAD中编辑曲线也是非常重要的。
一种常见的编辑方法是修改曲线的顶点。
通过选择曲线上的顶点,并移动、删除或添加新的控制点,可以改变曲线的形状。
还可以使用拉伸、旋转和缩放等命令来改变曲线的大小、方向和比例。
如果需要对曲线进行修剪或延伸,可以使用修剪和延伸命令。
这些命令可以根据实际需要轻松地修改和调整曲线。
此外,CAD还提供了一些高级的曲线编辑功能。
例如,可以使用曲线编辑器来平滑、阻尼或调整曲线的张力和曲率。
这些参数可以根据需要进行微调,以实现所需的曲线效果。
另外,还可以使用曲线阵列命令来创建复杂的曲线图案,例如花纹或曲线行列。
在使用CAD进行曲线绘制和编辑时,还要注意一些技巧和细节。
首先,建议使用图层或对象属性来区分不同的曲线元素。
通过将曲线分组或分配到不同的图层,可以更好地组织和管理设计文件。
此外,建立精确的参照和标尺是非常重要的。
通过设置准确的坐标系和标尺线,可以确保曲线的位置和尺寸符合设计要求。
最后,在绘制和编辑曲线时,要时刻保持设计的一致性和美感。
通过对曲线进行审美和比例的调整,可以创建出更吸引人的设计作品。
总结起来,利用CAD进行绘制和编辑曲线是一项基本而重要的技能。
通过熟练掌握各种曲线命令和工具,以及灵活运用曲线编辑的技巧,可以创造出各种出色的设计作品。
在实际应用中,不断练习和探索CAD的功能和特点,将使您成为一名优秀的CAD设计师。
使用CAD绘制精确的曲线和曲面
使用CAD绘制精确的曲线和曲面在工程设计和三维建模领域,CAD(计算机辅助设计)软件是不可或缺的工具。
它可以用来绘制各种图形、制作曲线和曲面,以及进行高精度的测量和分析。
本文将介绍使用CAD软件绘制精确曲线和曲面的技巧。
1. 绘制精确的曲线在CAD软件中,绘制曲线通常可以通过绘制多个控制点,然后使用曲线工具将这些点连接起来形成曲线。
对于精确的曲线,以下是一些建议:- 使用“贝塞尔曲线”工具,该工具可以通过拖动锚点和控制点来画出平滑的曲线。
通过调整锚点和控制点的位置和数量,可以实现各种不同形状的曲线。
- 使用“样条曲线”工具,该工具使用一系列的插值点来绘制曲线。
通过控制插值点的位置和数量,可以实现更加精确和灵活的曲线。
- 可以使用工具栏上的“圆”的工具来绘制曲线的一部分。
然后通过在圆上选择合适的点来连接起来,形成一段平滑的曲线。
- 使用CAD软件提供的辅助功能,如“吸附”和“自动约束”,来提高曲线的精确度。
这些功能可以自动将锚点和控制点对齐到网格或其他对象上。
2. 绘制精确的曲面在CAD软件中,绘制曲面主要是通过绘制曲线并进行曲面建模来实现。
以下是一些建议:- 使用绘制精确曲线的技巧,绘制曲线,然后使用曲面工具将这些曲线连接起来形成曲面。
- 使用CAD软件提供的“旋转”工具来生成旋转曲面。
选择一个曲线作为轴线,然后选择一个曲线或线段作为截面,通过旋转截面来创建曲面。
- 使用“布尔运算”工具将两个或多个曲面合并成一个曲面。
这可以通过求交、合并、切割等操作来实现。
- 使用CAD软件提供的“平面切割”工具,在曲面上创建切口或剖面,以便查看和修改曲面的内部结构。
3. 改善曲线和曲面的精确度为了提高曲线和曲面的精确度,可以采取以下措施:- 提高绘制曲线和曲面时的锚点和控制点的数量和密度。
更多的点可以提供更多的细节和控制,使曲线和曲面更加平滑和精确。
- 使用CAD软件提供的工具来检查和调整曲线和曲面的参数和属性。
缓和曲线CAD画法
在AutoCAD中缓和曲线的几种画法2011-06-25 20:32在AutoCAD中画缓和曲线比较困难,目前常用的画法有AutoLISP程序法(需要已知曲线要素)、坐标脚本法(需事先计算好各特征点及其他点为的坐标)、曲线命令法(需事先准备各特征点坐标),现分别介绍如下:画法一:缓和曲线AutoLISP 使用程序一、制作缓和曲线AutoLISP 使用程序复制AutoLISP程序源代码,打开“记事本”,粘贴进去后,另存为文件名“缓和曲线.LSP”,保存类型为“所有文件”(AutoLISP程序源代码见附件)二、加载缓和曲线AutoLISP使用程序在命令行输入“appload”打开自动加载对话框。
在对话框的“查找范围”里找到“缓和曲线.LSP”的那个程序,选中后,点击【加载】,显示“已成功加载缓和曲线.LSP”后,关闭对话框,ok你那个程序自动启动加载了。
三、在CAD中画出切线长四、运行程序在命令行中输入hh回车五、选择两条切线,然后输入曲线半径如:2204.5回车六、输入缓和曲线长,如270,绘图完成!画法二:坐标脚本法1.现做一个CAD脚本,会的人跳过(用Windows 文本另存为“.scr”文件)2.脚本编辑输入“SPLINE+空格键+Y坐标+,+X坐标+空格键+Y坐标+,+X坐标……” 以此类推!点输的越密,线条越平滑。
也可以用EXCEL算出各个点的坐标后粘贴进去,然后按照“SPLINE+空格键+Y坐标+,+X坐标+空格键+Y坐标+,+X坐标……”格式编辑。
3.进入CAD,运行脚本,就行了!注意:你可能输入了100个点,而出现的确只有几个点,这个很正常,你把图像删除了,多运行几次就行,一般不超过4次。
画法三:使用真样条曲线命令举例如下:输入导线:pline命令绘制1、2、3各点,其对应坐标如下x1=213.7748 y1=92.1117x2=313.7748 y2=92.1117x3=399.6787 y3=143.3026绘制通过ZH、HZ、QZ、HY和YH各点的和路线导线相切的含缓和曲线的平曲线。
在CAD中画缓及曲线过程
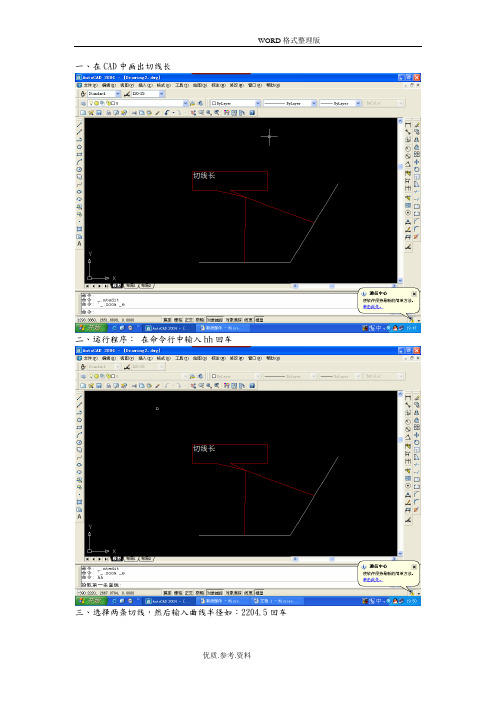
一、在CAD中画出切线长二、运行程序:在命令行中输入hh回车三、选择两条切线,然后输入曲线半径如:2204.5回车四、输入缓和曲线长,如270,绘图完成!如图基本命令集(设计中心“Ctrl+2”)修改特性“Ctrl+1”)(属性匹配)(文字样式)(设置颜色)(图层操作)ETYPE(线形)(线形比例)(线宽)(图形单位)(属性定义)(编辑属性)(边界创建,包括创建闭合多段线和面域)(对齐)(退出)(输出其它格式文件)(输入文件)(自定义CAD设置)PLOT(打印)(清除垃圾)(重新生成)(重命名)(捕捉栅格)(设置极轴追踪)(设置捕捉模式)(打印预览)(工具栏)(命名视图)(面积)(距离)(显示图形数据信息)、绘图命令:(点)(直线)(射线)(多段线)(多线)(样条曲线)(正多边形)(矩形)圆)圆弧)(圆环)(椭圆)(面域)(多行文本)(多行文本)(块定义)(插入块)(定义块文件)(等分)(填充)、修改命令:(复制)(镜像)(阵列)(偏移)(旋转)(移动)键*ERASE(删除)(分解)(修剪)(延伸)H(拉伸)(直线拉长)(比例缩放)(打断)倒角)(倒圆角)(多段线编辑)(修改文本)、视窗缩放:(平移)+空格+空格,*实时缩放局部放大返回上一视图+E,*显示全图、尺寸标注:(直线标注)IGNED(对齐标注)(半径标注)(直径标注)(角度标注)(中心标注)(点标注)(标注形位公差)(快速引出标注)(基线标注)(连续标注)(标注样式)IMEDIT(编辑标注)替换标注系统变量) (二)常用CTRL快捷键【CTRL】+1*PROPERTIES(修改特性) 【CTRL】+2*ADCENTER(设计中心)【CTRL】+O *OPEN(打开文件)【CTRL】+N、M *NEW(新建文件)【CTRL】+P *PRINT(打印文件)【CTRL】+S *SAVE(保存文件)【CTRL】+Z *UNDO(放弃)【CTRL】+X *CUTCLIP(剪切)【CTRL】+C *COPYCLIP(复制)【CTRL】+V *PASTECLIP(粘贴)【CTRL】+B *SNAP(栅格捕捉)【CTRL】+F *OSNAP(对象捕捉)【CTRL】+G *GRID(栅格)【CTRL】+L *ORTHO(正交)【CTRL】+W *(对象追踪)【CTRL】+U *(极轴)(三)常用功能键【F1】*HELP(帮助)【F2】*(文本窗口)【F3】*OSNAP(对象捕捉)【F7】*GRIP(栅格)【F8】*ORTHO(正交)第17章布图、打印与图纸管理绘制好的建筑图样需要打印出来进行报批、存档、交流、指导施工,所以绘图的最后一步是打印图形。
cad怎么画曲线
cad怎么画曲线CAD软件是一款用于制图的设计软件,它可以支持绘制图形、三维模型、渲染等功能。
在CAD中,绘制曲线是一个基本操作,因此掌握曲线的绘制方法是学习CAD绘图技巧的重要一步。
下面介绍几种常见的绘制曲线的方法。
1. 绘制拟合曲线在CAD中,拟合曲线是通过已知点生成一条平滑曲线的一种方法。
绘制拟合曲线的步骤如下:(1)绘制一些点并确定其位置。
(2)选择Curve Fit命令,并选择直线、二次曲线、三次曲线等。
(3)选择需要绘制曲线的点。
(4)按下Enter键并生成曲线。
2. 绘制多段线CAD的多段线是由一条起始点通过在坐标系中移动鼠标形成的一系列线段组成的。
绘制多段线的步骤如下:(1)选择Pline或Polygon命令。
(2)在描绘曲线之前,选择一些点并确定它们的位置。
(3)连接这些点并生成一条多段线。
(4)在多段线中插入曲线。
3. 绘制样条曲线在CAD中,样条曲线是一种平滑的曲线,它通过沿着给定的点生成。
绘制样条曲线的步骤如下:(1)选择Spline命令。
(2)在绘制曲线之前选择一些点,并确定它们的位置。
(3)连接这些点并生成一条样条曲线。
4. 绘制圆弧在CAD中,圆弧是一段弧线的一部分,它可以绘制出任意半径的弧线。
绘制圆弧的步骤如下:(1)选择Arc命令。
(2)通过在坐标系中选择一个起点作为其中一点,然后再另一个位置处确定曲线的半径和角度。
(3)按下Enter键并生成一个圆弧。
绘制曲线是CAD设计中的基本技能,了解以上方法可以更好地应用到实际工程中。
通过练习和实践,掌握如何绘制曲线将极大地提高CAD绘图水平。
如何在CAD中制作平滑的曲线
如何在CAD中制作平滑的曲线在CAD软件中,制作平滑的曲线是一项常见但又有一定难度的任务。
本文将介绍一些实用的技巧和方法,帮助您在CAD中制作出精确且平滑的曲线。
1. 选择适当的曲线工具CAD软件通常提供了多种绘制曲线的工具,如线段、曲线拟合、样条曲线等。
根据您的绘图需求和对曲线平滑度的要求,选择适当的工具非常重要。
2. 使用控制点调整曲线形状大多数CAD软件允许您在绘制曲线时添加控制点,通过移动这些点来调整曲线的形状。
当需要制作平滑曲线时,可以适当增加控制点的数量,并仔细调整它们的位置来实现所需的曲线形状。
3. 利用阻尼功能有些CAD软件提供了阻尼功能,可以帮助您绘制平滑曲线。
在绘制曲线时,启用阻尼功能可以减少曲线的震荡和不规则形状,使曲线更加平滑。
4. 使用曲线平滑命令许多CAD软件提供了曲线平滑的命令。
该命令可以对已有的曲线进行平滑处理,去除曲线中的锐角和不规则形状。
通过调整平滑命令的参数,可以控制曲线平滑的程度。
5. 确保曲线间连接平滑当您需要绘制多条曲线并希望它们连接平滑时,可以使用CAD软件提供的对象捕捉功能。
该功能可让您将曲线的端点对齐并自动连接它们,从而实现平滑过渡。
6. 利用辅助工具一些CAD软件还提供了辅助工具,如曲线约束、平滑路径等,可以帮助您更精确地制作平滑曲线。
了解和使用这些辅助工具,可以提高工作效率并得到更好的曲线效果。
7. 定期检查曲线质量在绘制曲线的过程中,应定期检查曲线的质量。
排查曲线中的不必要的节点、过长的线段和不规则的形状,并予以修复。
保持曲线的整洁和平滑,有助于提高模型的质量和可视效果。
总结制作平滑的曲线在CAD设计中是一项基本且重要的技能。
通过选择适当的工具、灵活运用控制点、使用软件提供的功能和辅助工具,您可以有效地绘制出精确且平滑的曲线。
同时,保持曲线的质量和合理的曲线布局,也是实现平滑曲线的关键所在。
通过不断的练习和实践,您将能够掌握这一技巧,并在CAD设计中取得更好的效果。
在CAD中实现曲线绘制的技巧与方法

在CAD中实现曲线绘制的技巧与方法CAD(计算机辅助设计)是现代工程设计领域中广泛使用的一种软件工具。
在CAD中,曲线绘制是重要的设计技巧之一。
本文将介绍在CAD软件中实现曲线绘制的一些技巧与方法,帮助大家更好地掌握这一重要的设计技能。
1. 绘制基本曲线:在CAD中,可以使用多种绘图工具来绘制不同类型的曲线。
其中一种最常用的曲线是折线,可以通过绘制一系列直线段来实现。
首先,选择折线工具,然后依次点击图纸上的各个节点,形成需要的曲线。
此外,还可以使用多段线工具来绘制更复杂的曲线,只需在选择节点时不松开鼠标即可。
2. 使用曲线工具:除了基本曲线外,CAD还提供了特定的曲线工具,如圆弧、椭圆、二次样条曲线等,以满足更多的设计需求。
通过选择对应的曲线工具,然后按照提示指示进行绘制,可以轻松地创建各种复杂的曲线。
3. 编辑曲线:在绘制曲线之后,可以使用CAD提供的编辑工具对曲线进行进一步的修改和优化。
例如,可以选择节点并拖动来改变曲线的形状和位置。
还可以调整曲线的控制点,使曲线更加光滑和精确。
4. 使用辅助工具:CAD还提供了许多辅助工具,可以帮助用户更好地实现曲线绘制。
例如,可以使用参考线来辅助绘制曲线,在绘制过程中可随时参考参考线的位置和角度。
此外,还可以使用对称、镜像等功能来快速复制和变换曲线。
5. 应用曲线修剪和延伸:在CAD中,可以使用修剪和延伸工具来改变曲线的形状和长度。
修剪工具可以帮助去除曲线中不需要的部分,而延伸工具则可以帮助延长曲线到指定位置。
这些工具在进行曲线编辑时非常有用且方便。
6. 利用CAD插件扩展曲线功能:除了CAD软件本身提供的曲线功能外,还可以通过安装插件来扩展和增强曲线绘制的功能。
例如,一些插件提供了更多类型的曲线工具,还能辅助自动生成和编辑复杂的曲线结构,提高工作效率和设计质量。
7. 练习和实践:绘制曲线是一项技巧活,需要不断的练习和实践来提高。
在CAD中,可以选择一些练习题或者自己设计一些具有挑战性的曲线图形,通过多次尝试和优化来提高自己的曲线绘制能力。
CAD画缓和曲线lisp程序精编版
CAD中画缓和曲线,首先复制本文☆后面的源程序保存至cad安装目录的SUPPORT文件夹,保存类型为.lsp 可以随便复制一个SUPPORT文件夹内的lsp文件,然后替换本文的程序。
打开CAD后,输入appload回车,找到你保存的缓和曲线lsp程序,点击加载,然后就可以画缓和曲线了。
首先,要画出缓和曲线的两条直线,然后输入HH回车,按提示完成缓和曲线。
注:本程序,缓和曲线段拟合长度为0.4m,如需更改拟合长度,将程序的第8行(repeat (FIX(/ Ls 0.4))及9行(setq l (+ l (/ Ls (FIX(/ Ls 0.4))))中的0.4修改即可。
☆;;多义线摹拟缓和曲线。
;;输入起止直线、半径、缓和曲线长或设计车速。
;;命令:HH(defun com_p()(setq l 0)(command "ucs" "o" (list (- 0 x1) 0 0))(command "pline" (list 0 0 0) "w" "0" ""(repeat (FIX(/ Ls 0.4))(setq l (+ l (/ Ls (FIX(/ Ls 0.4))))x (+ (- l (/ (* l l l l l) 40 C C)) (/ (* l l l l l l l l l) 3456 C C C C))y (* id__ (+ (- (/ (* l l l) 6 C) (/ (* l l l l l l l) 336 C C C)) (/ (* l l l l l l l l l l l) 42240 C C C C C))));setq(command (list x y 0)));repaet);command(setq pt5 (trans (list x y 0) 1 0)));com_p(defun ll_v()(setq V (getreal "\nGive Velocity:")Ls1 (* V 0.85)Ls2 (/ (* 0.0357 V V V) R)Ls (max Ls1 Ls2 (/ R 9))Ls (* (fix (/ Ls 10)) 10.0));setq(if (> Ls R) (setq Ls R))(ll_d));ll_v(defun ll_d()(setq os (getvar "osmode"))(setvar "osmode" 0)(setq C (* Ls R)q (- (+ (- (/ Ls 2) (/ (* Ls Ls Ls) 240 R R)) (/ (* Ls Ls Ls Ls Ls) 34560 R R R R)) (/(* Ls Ls Ls Ls Ls Ls Ls) 8386560 R R R R R R))pt1 (cdr (assoc 10 (entget (car p1))))pt2 (cdr (assoc 11 (entget (car p1))))pt10(polar pt1 (angle pt1 pt2) (/ (distance pt1 pt2) 2))pt3 (cdr (assoc 10 (entget (car p2))))pt4 (cdr (assoc 11 (entget (car p2))))pt20(polar pt3 (angle pt3 pt4) (/ (distance pt3 pt4) 2))p (+ (- (/ (* Ls Ls) 24 R) (/ (* Ls Ls Ls Ls) 2688 R R R)) (/ (* Ls Ls Ls Ls Ls Ls) 506880 R R R R R))jd (inters pt1 pt2 pt3 pt4 nil)alf1(angle pt10 jd)alf2(angle pt20 jd)alf (- (angle jd pt20) alf1));setq(if (or (> alf pi) (and (< alf 0) (> alf (- 0 pi))))(progn(setq id__ -1)(if (> alf pi) (setq alf (- (+ pi pi) alf)) (setq alf (abs alf))));progn(progn(setq id__ 1)(if (<= alf (- 0 pi)) (setq alf (+ pi pi alf))));progn);if(setq x0 (/ (* (+ p R) (sin(/ alf 2.0))) (cos(/ alf 2.0)))x1 (+ x0 q)Cl (+ (* alf R) Ls)E (- (/ (+ R p) (cos(/ alf 2))) R));setq(command "ucs" "o" jd)(command "ucs" "z" (/ (* 180 alf1) pi))(com_p) (setq pt6 pt5)(setq ppt1 (list x1 0 0))(command "ucs" "")(command "ucs" "o" jd)(command "ucs" "z" (/ (* 180 alf2) pi))(setq id__ (- 0 id__)) (com_p)(setq ppt2 (list x1 0 0))(command "ucs" "")(if (> (abs(distance jd pt1)) (abs(distance jd pt2)))(setq ptt1 pt1)(setq ptt1 pt2));if(setq ptt2 (polar jd alf1 (- 0 x1)))(thh p1 ptt1 10)(thh p1 ptt2 11)(if (> (abs(distance jd pt3)) (abs(distance jd pt4)))(setq ptt3 pt3)(setq ptt3 pt4));if(setq ptt4 (polar jd alf2 (- 0 x1)))(thh p2 ptt3 10)(thh p2 ptt4 11)(if (= id__ 1) (command "arc" pt5 "e" pt6 "r" R) (command "arc" pt6 "e" pt5 "r" R)) (setq alfd (angf alf))(setvar "osmode" os)(command "cmdecho" "1")(command "text" pause pause "" (strcat "偏角=" alfd))(command "cmdecho" "0")(command "text" "" (strcat "半径=" (rtos R 2 2)))(command "text" "" (strcat "切线长=" (rtos x1 2 2)))(command "text" "" (strcat "曲线长=" (rtos Cl 2 2)))(command "text" "" (strcat "外距=" (rtos E 2 2)))(command "text" "" (strcat "缓曲长=" (rtos Ls 2 2))));ll_d(defun angf (alf)(setq alff (angtos alf 1 4)n 1kk (strlen alff))(repeat kk(setq alfn (substr alff n 1))(if (= alfn "d")(setq nn n));if(setq n (+ n 1)));repeat(strcat (substr alff 1 (- nn 1)) "%%" (substr alff nn)));angf(defun c:hh(/ p1 p2 pt1 pt2 pt3 pt4 pt5 pt6 pt10 pt20 id__ R V Ls E p3r1 x y l x0 x1 C jd alf alf1 alf2 q p Cl Ls1 Ls2)(command "ucs" "")(setq p1 nil p2 nil)(while (= p1 nil) (setq p1 (entsel "\n拾取第一条直线:")))(redraw (car p1) 3)(while (= p2 nil) (setq p2 (entsel "\n拾取第二条直线:")))(redraw (car p2) 3)(initget 1)(setq R (getdist "\n请输入圆曲线半径R: "))(initget 1 "Ls V")(setq p3 (getdist "\n输入缓和曲线长度(Ls)或[设计速度(V)]:")) (if (= p3 "V") (ll_v) (progn (setq ls p3) (ll_d)))(princ));eline(defun thh(len pt h)(setq en_data (entget (car len))old_data (assoc h en_data)new_data (cons h pt)en (subst new_data old_data en_data));setq(entmod en));thh。
CAD绘制曲线的五种技巧

CAD绘制曲线的五种技巧CAD(Computer-Aided Design)是一种计算机辅助设计技术,广泛应用于工程、建筑和制造等领域。
在使用CAD软件进行绘图时,曲线的绘制是一个非常重要的步骤。
本文将介绍CAD绘制曲线的五种技巧,帮助读者更加高效地完成曲线绘制任务。
一、使用基础绘图工具CAD软件通常提供了一系列的基础绘图工具,如直线、圆弧、多段线等,这些工具可以满足大部分曲线的绘制需求。
通过熟练掌握这些基础工具的使用方法,可以快速地绘制出各种曲线图形。
例如,使用直线工具可以绘制出线段,使用圆弧工具可以绘制出曲线弧段。
二、控制控制点在CAD软件中,我们可以通过控制控制点的位置和属性来调整曲线的形状。
对于贝塞尔曲线来说,控制点决定了曲线的控制线和曲率。
通过调整控制点的位置,可以改变曲线的形状。
此外,还可以通过调整控制点的属性,如权值和约束等,来进一步控制曲线的特性。
三、使用样条曲线样条曲线是CAD软件中一种常见的曲线类型,其特点是平滑且具有连续性。
通过选择适当的控制点,CAD软件可以生成样条曲线,用于绘制复杂的曲线图形。
在使用样条曲线时,可以通过增加或删除控制点,来调整曲线的形状。
此外,还可以使用插值功能,通过选取曲线上的若干点,自动生成样条曲线。
四、利用辅助工具CAD软件中通常还提供了一些辅助工具,如偏移、修剪、延伸等,这些工具可以帮助我们更加高效地绘制曲线。
比如,使用偏移工具可以在原有曲线的基础上生成一条平行的曲线,使用修剪工具可以删除曲线上的不需要部分,使用延伸工具可以延长曲线的端点。
通过合理运用这些辅助工具,可以更加灵活地调整和编辑曲线。
五、使用CAD插件和脚本除了CAD软件本身提供的功能,还可以使用各类CAD插件和脚本来扩展CAD绘图的功能。
比如,有些插件可以通过简单的操作,快速生成复杂的曲线图形;有些脚本可以自动化完成一些重复性工作,提高绘图的效率。
通过了解和使用这些插件和脚本,我们可以更加便捷地实现曲线的绘制和编辑。
cad画缓和曲线lisp程序(1)
CAD中画缓和曲线,首先复制本文☆后面的源程序保存至cad安装目录的SUPPORT文件夹,保存类型为.lsp 可以随便复制一个SUPPORT文件夹内的lsp文件,然后替换本文的程序。
打开CAD后,输入appload回车,找到你保存的缓和曲线lsp程序,点击加载,然后就可以画缓和曲线了。
首先,要画出缓和曲线的两条直线,然后输入HH回车,按提示完成缓和曲线。
注:本程序,缓和曲线段拟合长度为,如需更改拟合长度,将程序的第8行(repeat (FIX(/ Ls )及9行(setq l (+ l (/ Ls (FIX(/ Ls )))中的修改即可。
☆;;多义线摹拟缓和曲线。
;;输入起止直线、半径、缓和曲线长或设计车速。
;;命令:HH(defun com_p()(setq l 0)(command "ucs" "o" (list (- 0 x1) 0 0))(command "pline" (list 0 0 0) "w" "0" ""(repeat (FIX(/ Ls )(setq l (+ l (/ Ls (FIX(/ Ls )))x (+ (- l (/ (* l l l l l) 40 C C)) (/ (* l l l l l l l l l) 3456 C C C C))y (* id__ (+ (- (/ (* l l l) 6 C) (/ (* l l l l l l l) 336 C C C)) (/ (* l l l l l l l l l l l) 42240 C C C C C))));setq(command (list x y 0)));repaet);command(setq pt5 (trans (list x y 0) 1 0)));com_p(defun ll_v()(setq V (getreal "\nGive Velocity:")Ls1 (* VLs2 (/ (* V V V) R)Ls (max Ls1 Ls2 (/ R 9))Ls (* (fix (/ Ls 10)));setq(if (> Ls R) (setq Ls R))(ll_d));ll_v(defun ll_d()(setq os (getvar "osmode"))(setvar "osmode" 0)(setq C (* Ls R)q (- (+ (- (/ Ls 2) (/ (* Ls Ls Ls) 240 R R)) (/ (* Ls Ls Ls Ls Ls) 34560 R R R R)) (/ (* Ls Ls Ls Ls Ls Ls Ls) 8386560 R R R R R R)) pt1 (cdr (assoc 10 (entget (car p1))))pt2 (cdr (assoc 11 (entget (car p1))))pt10(polar pt1 (angle pt1 pt2) (/ (distance pt1 pt2) 2))pt3 (cdr (assoc 10 (entget (car p2))))pt4 (cdr (assoc 11 (entget (car p2))))pt20(polar pt3 (angle pt3 pt4) (/ (distance pt3 pt4) 2))p (+ (- (/ (* Ls Ls) 24 R) (/ (* Ls Ls Ls Ls) 2688 R R R)) (/ (* Ls Ls Ls Ls Ls Ls) 506880 R R R R R))jd (inters pt1 pt2 pt3 pt4 nil)alf1(angle pt10 jd)alf2(angle pt20 jd)alf (- (angle jd pt20) alf1));setq(if (or (> alf pi) (and (< alf 0) (> alf (- 0 pi))))(progn(setq id__ -1)(if (> alf pi) (setq alf (- (+ pi pi) alf)) (setq alf (abs alf))));progn(progn(setq id__ 1)(if (<= alf (- 0 pi)) (setq alf (+ pi pi alf))));progn);if(setq x0 (/ (* (+ p R) (sin(/ alf )) (cos(/ alf ))x1 (+ x0 q)Cl (+ (* alf R) Ls)E (- (/ (+ R p) (cos(/ alf 2))) R));setq(command "ucs" "o" jd)(command "ucs" "z" (/ (* 180 alf1) pi))(com_p) (setq pt6 pt5)(setq ppt1 (list x1 0 0))(command "ucs" "")(command "ucs" "o" jd)(command "ucs" "z" (/ (* 180 alf2) pi))(setq id__ (- 0 id__)) (com_p)(setq ppt2 (list x1 0 0))(command "ucs" "")(if (> (abs(distance jd pt1)) (abs(distance jd pt2)))(setq ptt1 pt1)(setq ptt1 pt2));if(setq ptt2 (polar jd alf1 (- 0 x1)))(thh p1 ptt1 10)(thh p1 ptt2 11)(if (> (abs(distance jd pt3)) (abs(distance jd pt4)))(setq ptt3 pt3)(setq ptt3 pt4));if(setq ptt4 (polar jd alf2 (- 0 x1)))(thh p2 ptt3 10)(thh p2 ptt4 11)(if (= id__ 1) (command "arc" pt5 "e" pt6 "r" R) (command "arc" pt6 "e" pt5 "r" R))(setq alfd (angf alf))(setvar "osmode" os)(command "cmdecho" "1")(command "text" pause pause "" (strcat "偏角=" alfd))(command "cmdecho" "0")(command "text" "" (strcat "半径=" (rtos R 2 2)))(command "text" "" (strcat "切线长=" (rtos x1 2 2)))(command "text" "" (strcat "曲线长=" (rtos Cl 2 2)))(command "text" "" (strcat "外距=" (rtos E 2 2)))(command "text" "" (strcat "缓曲长=" (rtos Ls 2 2))));ll_d(defun angf (alf)(setq alff (angtos alf 1 4)n 1kk (strlen alff))(repeat kk(setq alfn (substr alff n 1))(if (= alfn "d")(setq nn n));if(setq n (+ n 1)));repeat(strcat (substr alff 1 (- nn 1)) "%%" (substr alff nn)));angf(defun c:hh(/ p1 p2 pt1 pt2 pt3 pt4 pt5 pt6 pt10 pt20 id__ R V Ls E p3r1 x y l x0 x1 C jd alf alf1 alf2 q p Cl Ls1 Ls2)(command "ucs" "")(setq p1 nil p2 nil)(while (= p1 nil) (setq p1 (entsel "\n拾取第一条直线:")))(redraw (car p1) 3)(while (= p2 nil) (setq p2 (entsel "\n拾取第二条直线:")))(redraw (car p2) 3)(initget 1)(setq R (getdist "\n请输入圆曲线半径R: "))(initget 1 "Ls V")(setq p3 (getdist "\n输入缓和曲线长度(Ls)或[设计速度(V)]: ")) (if (= p3 "V") (ll_v) (progn (setq ls p3) (ll_d)))(princ));eline(defun thh(len pt h)(setq en_data (entget (car len))old_data (assoc h en_data)new_data (cons h pt)en (subst new_data old_data en_data));setq(entmod en));thh。
CAD中的画线和曲线绘制教程

CAD中的画线和曲线绘制教程CAD(Computer-Aided Design)是一种广泛使用的计算机辅助设计软件,它在建筑、机械和制图等领域具有重要作用。
在CAD软件中,画线和曲线的绘制是最基本和常见的操作之一。
本教程将向您介绍CAD中的画线和曲线绘制方法,帮助您更好地掌握这一技巧。
1. 画线画线是CAD中最基本的绘图操作之一。
在CAD软件中,有几种方法可以画线:a. 直线:选择直线工具,在工作区点击起点,然后点击终点,即可完成直线绘制。
b. 多段线:选择多段线工具,在工作区逐个点击每个线段的顶点,最后双击或按下回车键即可完成绘制。
c. 矩形:选择矩形工具,在工作区点击矩形的对角线顶点,即可完成矩形绘制。
d. 圆:选择圆工具,在工作区点击圆心,然后点击半径的终点,即可完成圆的绘制。
e. 弧:选择弧工具,在工作区点击弧的起点、终点和半径点,即可完成弧的绘制。
2. 曲线绘制除了基本的直线和弧线之外,CAD软件还提供了更复杂的曲线绘制方法,如贝塞尔曲线和样条曲线:a. 贝塞尔曲线:选择贝塞尔曲线工具,在工作区点击曲线的起始点和终点,然后点击曲线的控制点来调整曲线的形状。
b. 样条曲线:选择样条曲线工具,在工作区逐个点击曲线的顶点,CAD软件会自动根据这些顶点绘制出平滑的曲线。
3. 常用技巧为了更好地绘制线条和曲线,以下是一些常用的技巧:a. 快捷键:熟练掌握CAD软件中的快捷键可以提高绘图效率。
例如,L键用于绘制直线,C键用于绘制圆等。
b. 对齐和修剪:在CAD软件中,可以使用对齐工具和修剪工具来调整和修饰已绘制的线条和曲线。
对齐工具可用于将线条或曲线与其他对象对齐,修剪工具可用于删除不需要的部分。
c. 图层控制:使用图层命令可以将不同的绘图元素分组,以便更好地管理和编辑。
例如,可以将线条和曲线放在不同的图层中,并根据需要显示或隐藏这些图层。
总结:通过本教程,您应该已经了解了CAD软件中画线和曲线的基本绘制方法。
CAD曲线画法

引用如何在CAD中画缓和曲线一、在CAD中画出切线长二、运行程序:在命令行中输入hh回车三、选择两条切线,然后输入曲线半径如:2204.5回车四、输入缓和曲线长,如270,绘图完成!如图记事本格式内容,新建的lisp语言,在CAD中要先加载;;多义线摹拟缓和曲线。
;;输入起止直线、半径、缓和曲线长或设计车速。
;;命令:HH(defun com_p()(setq l 0)(command "ucs" "o" (list (- 0 x1) 0 0))(command "pline" (list 0 0 0) "w" "0" ""(repeat 1000(setq l (+ l (/ Ls 1000))x (+ (- l (/ (* l l l l l) 40 C C)) (/ (* l l l l l l l l l) 3456 C C C C))y (* id__ (+ (- (/ (* l l l) 6 C) (/ (* l l l l l l l) 336 C C C)) (/ (* l l l l l l l l l l l) 42240 C C C C C))));setq(command (list x y 0)));repaet);command(setq pt5 (trans (list x y 0) 1 0)));com_p(defun ll_v()(setq V (getreal "\nGive Velocity:")Ls1 (* V 0.85)Ls2 (/ (* 0.0357 V V V) R)Ls (max Ls1 Ls2 (/ R 9))Ls (* (fix (/ Ls 10)) 10.0));setq(if (> Ls R) (setq Ls R))(ll_d));ll_v(defun ll_d()(setq os (getvar "osmode"))(setvar "osmode" 0)(setq C (* Ls R)q (- (+ (- (/ Ls 2) (/ (* Ls Ls Ls) 240 R R)) (/ (* Ls Ls Ls Ls Ls) 34560 R R R R)) (/ (* Ls Ls Ls Ls Ls Ls Ls) 8386560 R R R R R R))pt1 (cdr (assoc 10 (entget (car p1))))pt2 (cdr (assoc 11 (entget (car p1))))pt10(polar pt1 (angle pt1 pt2) (/ (distance pt1 pt2) 2))pt3 (cdr (assoc 10 (entget (car p2))))pt4 (cdr (assoc 11 (entget (car p2))))pt20(polar pt3 (angle pt3 pt4) (/ (distance pt3 pt4) 2))p (+ (- (/ (* Ls Ls) 24 R) (/ (* Ls Ls Ls Ls) 2688 R R R)) (/ (* Ls Ls Ls Ls Ls Ls) 506880 R R R R R))jd (inters pt1 pt2 pt3 pt4 nil)alf1(angle pt10 jd)alf2(angle pt20 jd)alf (- (angle jd pt20) alf1));setq(if (or (> alf pi) (and (< alf 0) (> alf (- 0 pi))))(progn(setq id__ -1)(if (> alf pi) (setq alf (- (+ pi pi) alf)) (setq alf (abs alf))) );progn(progn(setq id__ 1)(if (<= alf (- 0 pi)) (setq alf (+ pi pi alf))));progn);if(setq x0 (/ (* (+ p R) (sin(/ alf 2.0))) (cos(/ alf 2.0)))x1 (+ x0 q)Cl (+ (* alf R) Ls)E (- (/ (+ R p) (cos(/ alf 2))) R));setq(command "ucs" "o" jd)(command "ucs" "z" (/ (* 180 alf1) pi))(com_p) (setq pt6 pt5)(setq ppt1 (list x1 0 0))(command "ucs" "")(command "ucs" "o" jd)(command "ucs" "z" (/ (* 180 alf2) pi))(setq id__ (- 0 id__)) (com_p)(setq ppt2 (list x1 0 0))(command "ucs" "")(if (> (abs(distance jd pt1)) (abs(distance jd pt2)))(setq ptt1 pt1)(setq ptt1 pt2));if(setq ptt2 (polar jd alf1 (- 0 x1)))(thh p1 ptt1 10)(thh p1 ptt2 11)(if (> (abs(distance jd pt3)) (abs(distance jd pt4)))(setq ptt3 pt3)(setq ptt3 pt4));if(setq ptt4 (polar jd alf2 (- 0 x1)))(thh p2 ptt3 10)(thh p2 ptt4 11)(if (= id__ 1) (command "arc" pt5 "e" pt6 "r" R) (command "arc" pt6 "e" pt5 "r" R))(setq alfd (angf alf))(setvar "osmode" os)(command "cmdecho" "1")(command "text" pause pause "" (strcat "偏角=" alfd)) (command "cmdecho" "0")(command "text" "" (strcat "半径=" (rtos R 2 2)))(command "text" "" (strcat "切线长=" (rtos x1 2 2)))(command "text" "" (strcat "曲线长=" (rtos Cl 2 2)))(command "text" "" (strcat "外距=" (rtos E 2 2)))(command "text" "" (strcat "缓和曲线长=" (rtos Ls 2 2))));ll_d(defun angf (alf)(setq alff (angtos alf 1 4)n 1kk (strlen alff))(repeat kk(setq alfn (substr alff n 1))(if (= alfn "d")(setq nn n));if(setq n (+ n 1)));repeat(strcat (substr alff 1 (- nn 1)) "%%" (substr alff nn)));angf(defun c:hh(/ p1 p2 pt1 pt2 pt3 pt4 pt5 pt6 pt10 pt20 id__ R V Ls E p3 r1 x y l x0 x1 C jd alf alf1 alf2 q p Cl Ls1 Ls2)(command "ucs" "")(setq p1 nil p2 nil)(while (= p1 nil) (setq p1 (entsel "\n拾取第一条直线:")))(redraw (car p1) 3)(while (= p2 nil) (setq p2 (entsel "\n拾取第二条直线:")))(redraw (car p2) 3)(initget 1)(setq R (getdist "\n请输入弯道半径R: "))(initget 1 "Ls V")(setq p3 (getdist "\n输入缓和曲线长度(Ls)或[设计速度(V)]: "))(if (= p3 "V") (ll_v) (progn (setq ls p3) (ll_d)))(princ));eline(defun thh(len pt h)(setq en_data (entget (car len))old_data (assoc h en_data)new_data (cons h pt)en (subst new_data old_data en_data));setq(entmod en));thh公路设计中的缓和曲线在CAD中绘制时一直是个难题。
学习CAD设计中曲线绘制与调整的技巧

学习CAD设计中曲线绘制与调整的技巧在CAD设计中,曲线是一种非常常见且重要的绘图元素。
掌握曲线绘制与调整的技巧,将能够极大地提高CAD设计的效率和质量。
下面将介绍几种常用的曲线绘制与调整的技巧。
1. Bézier曲线Bézier曲线是一种由法国工程师Bézier发明的曲线,它通过控制点来定义形状。
在CAD设计中,我们可以使用Bézier曲线绘制各种光滑的曲线。
要绘制一条Bézier曲线,首先选择曲线工具,然后依次点击起始点、终点和至少一个控制点,然后调整控制点的位置以调整曲线的形状。
2. 曲线的拟合点在CAD设计中,有时候我们需要通过一组给定的点来绘制曲线。
在这种情况下,我们可以使用曲线的拟合点工具。
首先选择曲线的拟合点工具,然后依次点击给定的点,CAD软件将会自动计算并绘制出一条符合这些点的曲线。
3. 曲线的调整在绘制曲线后,我们可能需要对其进行调整。
CAD软件通常提供了一些调整曲线的工具,比如平移、旋转、缩放等。
通过这些工具,我们可以对曲线的位置、方向和大小进行调整,以满足设计的要求。
4. 曲线的剪切和延伸有时候,我们可能需要对曲线进行剪切或延伸。
在CAD设计中,我们可以使用曲线的剪切和延伸工具来实现这个目的。
首先选择曲线剪切或延伸工具,然后选择需要操作的曲线和指定的剪切或延伸距离,CAD软件将会自动进行相应的操作。
5. 曲线的平滑和修整在CAD设计中,我们常常需要对曲线进行平滑和修整。
CAD软件通常提供了一些平滑和修整曲线的工具,比如补间工具、滤镜工具等。
通过这些工具,我们可以对曲线进行平滑处理,使其更加光滑和流畅。
6. 曲线的连续性在CAD设计中,曲线的连续性是一个非常重要的概念。
连续性是指两条曲线在连接点处相互衔接的程度。
CAD软件通常提供了一些工具来保持曲线的连续性,比如切割点工具、合并点工具等。
通过这些工具,我们可以确保曲线在连接点处呈现出平滑、无缝的过渡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在AutoCAD中缓和曲线的几种画法2011-06-25 20:32在AutoCAD中画缓和曲线比较困难,目前常用的画法有AutoLISP 程序法(需要已知曲线要素)、坐标脚本法(需事先计算好各特征点及其他点为的坐标)、曲线命令法(需事先准备各特征点坐标),现分别介绍如下:画法一:缓和曲线AutoLISP 应用程序一、制作缓和曲线AutoLISP 应用程序复制AutoLISP程序源代码,打开“记事本”,粘贴进去后,另存为文件名“缓和曲线.LSP”,保存类型为“所有文件”(AutoLISP程序源代码见附件)二、加载缓和曲线AutoLISP应用程序在命令行输入“appload”打开自动加载对话框。
在对话框的“查找范围”里找到“缓和曲线.LSP”的那个程序,选中后,点击【加载】,显示“已成功加载缓和曲线.LSP”后,关闭对话框,ok你那个程序自动启动加载了。
三、在CAD中画出切线长四、运行程序在命令行中输入hh回车五、选择两条切线,然后输入曲线半径如:2204.5回车六、输入缓和曲线长,如270,绘图完成!画法二:坐标脚本法1.现做一个CAD脚本,会的人跳过(用Windows 文本另存为“.scr”文件)2.脚本编辑输入“SPLINE+空格键+Y坐标+,+X坐标+空格键+Y坐标+,+X坐标……” 以此类推!点输的越密,线条越平滑。
也可以用EXCEL算出各个点的坐标后粘贴进去,然后按照“SPLINE+空格键+Y坐标+,+X坐标+空格键+Y坐标+,+X坐标……”格式编辑。
3.进入CAD,运行脚本,就行了!注意:你可能输入了100个点,而出现的确只有几个点,这个很正常,你把图像删除了,多运行几次就行,一般不超过4次。
画法三:使用真样条曲线命令举例如下:输入导线:pline命令绘制1、2、3各点,其对应坐标如下x1=213.7748 y1=92.1117x2=313.7748 y2=92.1117x3=399.6787 y3=143.3026绘制通过ZH、HZ、QZ、HY和YH各点的与路线导线相切的含缓和曲线的平曲线。
通过计算,五个点的直角坐标为:ZH:X=232.9548 Y=92.1117HY:X=285.3608 Y=94.4667QZ:X=311.8101 Y=99.2371YH:X=336.9780 Y=108.6801HZ:X=383.6319 Y=133.7401使用真样条曲线命令绘制含缓和曲线的平曲线的基本操作步骤如下:Command(命令): Spline(启动真样条曲线命令)object/<Enter first point>(指定起点):232.9548,92.1117(通过ZH)Enter point :285.3608,94.4667Close/Fit Tolerance/<Enter point>(指定下一个点):311.8101,99.2371<通过QZ>Close/Fit Tolerance/<Enter point> (指定下一个点):336.9708,108.6801<通过YH>Close/Fit Tolerance/<Enter point>(指定下一个点):383.6319,133.7401<通过HZ>Close/Fit Tolerance/<Enter point>(指定下一个点):<加如回车>(选择输入切点的模式)Enter star tangent(指定起点切向):232.9548,92.1117 (输入起点切点)Enter star tangent(指定端点切向):383.6319,133.7401 (输入终点的切点)附件:缓和曲线AutoLISP 程序源代码;;多义线摹拟缓和曲线。
;;输入起止直线、半径、缓和曲线长或设计车速。
;;命令:HH(defun com_p()(setq l 0)(command "ucs" "o" (list (- 0 x1) 0 0))(command "pline" (list 0 0 0) "w" "0" ""(repeat 1000(setq l (+ l (/ Ls 1000))x (+ (- l (/ (* l l l l l) 40 C C)) (/ (* l l l l l l l l l) 3456 C C C C))y (* id__ (+ (- (/ (* l l l) 6 C) (/ (* l l l l l l l) 336 C C C)) (/ (* l l l l l l l l l l l) 42240 C C C C C))));setq(command (list x y 0)));repaet);command(setq pt5 (trans (list x y 0) 1 0)));com_p(defun ll_v()(setq V (getreal "\nGive Velocity:")Ls1 (* V 0.85)Ls2 (/ (* 0.0357 V V V) R)Ls (max Ls1 Ls2 (/ R 9))Ls (* (fix (/ Ls 10)) 10.0));setq(if (> Ls R) (setq Ls R))(ll_d));ll_v(defun ll_d()(setq os (getvar "osmode"))(setvar "osmode" 0)(setq C (* Ls R)q (- (+ (- (/ Ls 2) (/ (* Ls Ls Ls) 240 R R)) (/ (* Ls Ls Ls Ls Ls) 34560 R R R R)) (/ (* Ls Ls Ls Ls Ls Ls Ls) 8386560 R R R R R R))pt1 (cdr (assoc 10 (entget (car p1))))pt2 (cdr (assoc 11 (entget (car p1))))pt10(polar pt1 (angle pt1 pt2) (/ (distance pt1 pt2) 2))pt3 (cdr (assoc 10 (entget (car p2))))pt4 (cdr (assoc 11 (entget (car p2))))pt20(polar pt3 (angle pt3 pt4) (/ (distance pt3 pt4) 2))p (+ (- (/ (* Ls Ls) 24 R) (/ (* Ls Ls Ls Ls) 2688 R R R)) (/ (* Ls Ls Ls Ls Ls Ls) 506880 R R R R R))jd (inters pt1 pt2 pt3 pt4 nil)alf1(angle pt10 jd)alf2(angle pt20 jd)alf (- (angle jd pt20) alf1));setq(if (or (> alf pi) (and (< alf 0) (> alf (- 0 pi))))(progn(setq id__ -1)(if (> alf pi) (setq alf (- (+ pi pi) alf)) (setq alf (abs alf))));progn(progn(setq id__ 1)(if (<= alf (- 0 pi)) (setq alf (+ pi pi alf))));progn);if(setq x0 (/ (* (+ p R) (sin(/ alf 2.0))) (cos(/ alf 2.0)))x1 (+ x0 q)Cl (+ (* alf R) Ls)E (- (/ (+ R p) (cos(/ alf 2))) R));setq(command "ucs" "o" jd)(command "ucs" "z" (/ (* 180 alf1) pi))(com_p) (setq pt6 pt5)(setq ppt1 (list x1 0 0))(command "ucs" "")(command "ucs" "o" jd)(command "ucs" "z" (/ (* 180 alf2) pi))(setq id__ (- 0 id__)) (com_p)(setq ppt2 (list x1 0 0))(command "ucs" "")(if (> (abs(distance jd pt1)) (abs(distance jd pt2)))(setq ptt1 pt1)(setq ptt1 pt2));if(setq ptt2 (polar jd alf1 (- 0 x1)))(thh p1 ptt1 10)(thh p1 ptt2 11)(if (> (abs(distance jd pt3)) (abs(distance jd pt4)))(setq ptt3 pt3)(setq ptt3 pt4));if(setq ptt4 (polar jd alf2 (- 0 x1)))(thh p2 ptt3 10)(thh p2 ptt4 11)(if (= id__ 1) (command "arc" pt5 "e" pt6 "r" R) (command "arc" pt6 "e" pt5 "r" R)) (setq alfd (angf alf))(setvar "osmode" os)(command "cmdecho" "1")(command "text" pause pause "" (strcat "偏角=" alfd))(command "cmdecho" "0")(command "text" "" (strcat "半径=" (rtos R 2 2)))(command "text" "" (strcat "切线长=" (rtos x1 2 2)))(command "text" "" (strcat "曲线长=" (rtos Cl 2 2)))(command "text" "" (strcat "外距=" (rtos E 2 2)))(command "text" "" (strcat "缓和曲线长=" (rtos Ls 2 2))));ll_d(defun angf (alf)(setq alff (angtos alf 1 4)n 1kk (strlen alff))(repeat kk(setq alfn (substr alff n 1))(if (= alfn "d")(setq nn n));if(setq n (+ n 1)));repeat(strcat (substr alff 1 (- nn 1)) "%%" (substr alff nn)));angf(defun c:hh(/ p1 p2 pt1 pt2 pt3 pt4 pt5 pt6 pt10 pt20 id__ R V Ls E p3r1 x y l x0 x1 C jd alf alf1 alf2 q p Cl Ls1 Ls2) (command "ucs" "")(setq p1 nil p2 nil)(while (= p1 nil) (setq p1 (entsel "\n拾取第一条直线:"))) (redraw (car p1) 3)(while (= p2 nil) (setq p2 (entsel "\n拾取第二条直线:"))) (redraw (car p2) 3)(initget 1)(setq R (getdist "\n请输入弯道半径R: "))(initget 1 "Ls V")(setq p3 (getdist "\n输入缓和曲线长度(Ls)或[设计速度(V)]:")) (if (= p3 "V") (ll_v) (progn (setq ls p3) (ll_d)))(princ));eline(defun thh(len pt h)(setq en_data (entget (car len))old_data (assoc h en_data)new_data (cons h pt)en (subst new_data old_data en_data));setq(entmod en));thh。