西门子840D系统的组成
西门子840D系统PLC用户报警分析
西门子840D系统PLC用户报警分析(2009-04-27 22:59:00)转载标签:杂谈西门子840D系统PLC用户报警分析一、数控系统介绍SINUMERIK 840D是西门子公司20世纪90年代推出的高性能数控系统。
它主要由数控及驱动单元,MMC,PLC模块等三大部分组成。
这三部分在功能上既相互分工,又互为支持。
在物理结构上,NC-CPU和PLC-CPU合为一体,合成在NCU(Numerical Control Unit)中,但在逻辑功能上相互独立。
它把所有 CNC、PLC 和通讯任务综合在单个 NCU 模块中,在安装到NCU盒以后,再把NCU模块插入到SIMODRIVE 611D数字驱动系统中去,直接放置在 I/RF 电源模块右侧,与611D驱动系统构成一个整体。
SINUMERIK 840D具有以下几个特点:数字化驱动、轴控规模大、可以实现五轴联动、操作系统视窗化、软件内容丰富功能强大、具有远程诊断功能、保护功能健全、硬件高度集成化、模块化设计、内装PLC系统。
任何机床都会设计有报警,一个完善的报警系统对于机床的操作和维修都有很大的帮助,能够及时的提供给操作者相应的操作信息,也能很大程度的缩短维修的时间。
一个机床的电气系统设计的好与不好,不完全取决于他能否实现某些功能,完成规定的动作。
也在于他是否有一个详细,准确,可靠的报警系统。
840D系统的报警分为2大类,一类是系统的报警,一类是用户的报警。
系统报警是系统自带的,由西门子编写的通用报警。
而用户报警是由机床制造厂家针对于某类机床所编写的,不同的机床制造商,不同的机床类型,所拥有的用户报警是不同的。
二、标准的PLC用户报警840D标准的用户报警一共有25组(见图1),从图中可以看出,每一组报警有8个字节,每个字节有8位,所以每一组报警有64个。
报警的起始地址DB2.DBX180.0对应于700000号报警,依此类推。
其中报警号的中间两位和用户报警区域的数字是一致的,从这个规律我们可以很容易的推算出报警所对应的地址以便于维修时的查找,例如报警是700806,从08这个数字我们知道他是第8组的,那么他所对应的地址就是=DB2.DBX(180+8×8).6=DB2.DBX244.6。
西门子840D维修与调整

西门子840D 数控系统调试,编程和维修概要概 述西门子公司数控系统产品结构数控系统的基本构成NCKM M C数控系统第一讲西门子数控系统的基本构成一.西门子840D系统的组成SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。
人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP(Machine Control Panel)三部分。
MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
1.MMC我们最常用的MMC有两种:MMC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103.※PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。
PCU的软件被称作HMI,HMI有分为两种:嵌入式HMI和高级HMI。
一般标准供货时,PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载高级HMI.2.OPOP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。
西门子SINUMERIK 840D数控系统介绍

西门子SINUMERIK 840D数控系统介绍【摘要】:西门子(SINUMERIK)数控系统是德国西门子公司的产品。
西门子凭借在数控系统及驱动产品方面的专业思考与深厚积累,不断制造出机床产品的典范之作,为自动化应用提供了日趋完美的技术支持。
SINUMERIK 不仅意味着一系列数控产品,其力度在于生产一种适于各种控制领域不同控制需求的数控系统,其构成只需很少的部件。
它具有高度的模块化、开放性以及规范化的结构,适于操作、编程和监控。
主要包括:控制及显示单元、PLC 输入/输出单元(PP)、PROFIBUS 总线单元、伺服驱动单元、伺服电机等部分。
【关键词】:SINUMERIK 840D数控系统性能硬件结构软件结构一.SINUMERIK 840D数控系统性能SINUMERIK 840D是西门子公司20世纪90年代推出的高性能数控系统。
它保持西门子前两代系统SINUMERIK 880和840C的三CPU结构:人机通信CPU(MMC-CPU)、数字控制CPU(NC-CPU)和可编程逻辑控制器CPU(PLC-CPU)。
三部分在功能上既相互分工,又互为支持。
在物理结构上,NC-CPU和PLC-CPU合为一体,合成在NCU(Numerical Control Unit)中,但在逻辑功能上相互独立。
相对于前几代系统,SINUMERIK 840D具有以下几个特点:1、数字化驱动在SINUMERIK 840D中,数控和驱动的接口信号是数字量,通过驱动总线接口,挂接各轴驱动模块。
2、轴控规模大最多可以配31个轴,其中可配10个主轴。
3、可以实现五轴联动SINUMERIK 840D可以实现X、Y、Z、A、B五轴的联动加工,任何三维空间曲面都能加工。
4、操作系统视窗化SINUMERIK 840D采用Windows 95作为操作平台,使操作简单、灵活,易掌握。
5、软件内容丰富功能强大SINUMERIK 840D可以实现加工(Machine)、参数设置(Parameter)、服务(Services)、诊断(Diagnosis)及安装启动(Start-up)等几大软件功能。
浅谈西门子840D系统

浅谈西门子840D系统数控磨床是利用磨具对工件表面进行高精度磨削加工的机床。
本文介绍了西门子840D系统在本钢冷轧厂MK84125磨床的应用及硬件组成。
标签:磨床;SINUMERIK 840D数控磨床主要由程序载体、人机交互装置、数控装置、伺服系统和磨床本体等组成。
数控磨床采用数控技术,它是利用数字信息对机械运动及加工过程进行控制的一种方法。
现代数控技术都是采用计算机控制的,数控技术称为计算机数控。
西门子840D具有高度开放式数控系统,他与其他数控系统的不同点事数控与驱动的借口信号是数字量的,它具有高度模块化及规范化的结构,更易操作,更易掌握。
冷轧厂MK84125磨床采用西门子840D控制系统。
SINUMERIK 840D 系统是由数控及驱动单元,人机交换装置,可编程控制器模块三部分组成。
1 数控装置数控装置:数控磨床最重要的组成部分,主要由输入/输出接口电路、控制器、运算器和存储器等组成。
数控装置的作用是将人机交互装置输入的信息,通过内部的逻辑电路或系统的控制软件进行编码、存储、运算和处理、将加工程序转换成控制磨床运动的信号和指令,以控制磨床的各个部件完成工作程序中规定的动作。
磨床的数控装置是一台工业计算机。
西门子840D的数控单元被称作NCU(Numerical Controlunit)单元。
它是840D系统的CPU,其上还集成了PLC 的CPU,它负责CNC,PLC和通讯任务。
因为NCU含有数控软件和PC控制软件,接口有面板接口X102,Profibus,编程接口X122,及I/O扩展手轮NCI/OX121接口,PCMCIA卡插槽X173,设备总线X172。
NCU发出各个轴的控制指令和PLC逻辑控制,控制机床的辅助动作。
2 驱动装置伺服系统:伺服系统由伺服控制电路、功率放大器电路和伺服电机组成的磨床执行机构,其作用是把来自数控装置的位置控制信息转化为各坐标轴方向的进给运动和定位运动。
伺服系统在数控磨床上采用控制环节,这样使其控制精度,动态性能、信号响应和加工效率有所提高。
9.1.2 西门子840D数控伺服系统硬件配置_PLC与步进伺服快速入门与实践_[共14页]
![9.1.2 西门子840D数控伺服系统硬件配置_PLC与步进伺服快速入门与实践_[共14页]](https://img.taocdn.com/s3/m/ebf989d1eff9aef8951e06a0.png)
步进伺服系统综合应用实例263地保证轧辊车削质量。
图9-3 数控轧辊车床基本电气设置图9.1.2 西门子840D 数控伺服系统硬件配置如图9-4所示,西门子840D 伺服系统共分为四个模块:电源和馈电模块、NCU 模块、主轴驱动模块(MSD )以及进给驱动模块(FDD )。
电源和馈电模块主要为840D 系统提供各种类型的电源,并将反馈的电量送给电网,该模块能使车床控制系统使用效率大大提高;NCU 模块是840D 数控系统中央处理单元,主要包括:NC-CPU 、带PLC 功能和通信功能模块、风扇模块(只在NCK 型号为573.2和573.3中附加)、各种接口(与上位机及伺服元件通信)、NCU 盒;主轴驱动模块主要负责对轧辊车床主轴的控制;进给驱动模块主要负责对轧辊车床刀架横向及纵向的控制。
这四部分模块通过设备总线及圆电缆连接。
接下来逐一介绍各主要组成部分的功能部件。
1.数字控制单元(NCU )(1)NCU 规格及引脚定义NCU 是SINUMERIK 840D 数控系统的控制中心和信息处理中心,数控系统的直线插补、圆弧插补等轨迹运算和控制、PLC 系统的算术运算和逻辑运算都是由NCU 完成的。
在SINUMERIK 840D 中,NC-CPU 和PLC-CPU 采用硬件一体化结构,集成在NCU 中。
264图9-4 西门子840D 伺服系统主要组成模块表9-2给出了NCU 的四种型号,已经由最初的NCU572.2发展到了NCU573.4,存储器容量从最大2.5MB 发展到64MB ,处理器频率由233MHz 发展到500MHz 。
由此可见,西门子840D NCU 单元能够满足数控轧辊车床PLC 程序容量大的中高性能控制需求。
表9-2西门子840D 伺服系统NCU 模块规格 模 块说 明 NCU 572.3AMD K6-2,233MHz NCU 572.4NC 存储器:最大2.5MB ,新的PLC314-2C-DP NCU 573.3Pentium Ⅲ,500MHz NCU 573.4 NC 存储器:最大64MB ,新的PLC314-2C-DP如图9-5(a )所示,NCU-1接口主要分为以下七部分。
840D数控系统地基本构成

——西门子数控系统调试,编程和维修概要西门子840D系统的组成SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。
●人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP(Machine Control Panel)三部分。
MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
1.MMC我们最常用的MMC有两种:MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103.※PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。
PCU的软件被称作HMI,HMI有分为两种:嵌入式HMI和高级HMI。
一般标准供货时,PCU20装载的是嵌入式HMI,而PCU50和PCU70则装载高级HMI.2.OPOP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。
根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031最为常用。
840D数控系统的基本构成

——西门子数控系统调试,编程和维修概要西门子840D系统的组成SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。
●人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP(Machine Control Panel)三部分。
MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
1.MMC我们最常用的MMC有两种:MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103.※PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。
PCU的软件被称作HMI,HMI有分为两种:嵌入式HMI和高级HMI。
一般标准供货时,PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载高级HMI.2.OPOP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。
根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031最为常用。
西门子840D知识

西门子840D知识SIEMENS系统的可编程序控制器SIMATIC MAGAGER是西门子用于进行PLC程序编制,进行机床状态控制的组件,它主要组成包括电源模块、CPU模块、输入输出模块,其接口有,RS232接口,PROFIBUS接口,MPI电缆接口等。
通过X122、MPI插口,使电脑与NCU相连PLC。
硬件组态硬件组态:告诉PLC硬件结构的过程波特率:MPI 187.5kbpsOPI 1.5Mbps过程:建项目-→建站-→组态硬件?自动组态:用线缆建PLC与840D相连,用自动组态自动识别(上载站)将PLC传到计算机:PLC-→UPLOAD-→选MPI地址=2,若地址=3,将包括PLC和NCU若备份PLC,则过程为:新建Project-→plc-→upload station,这样就将硬件备份了。
建立完站后,出现连个文件夹:hardware和cpu.CPU文件夹下有S7程序。
S7程序下有三个目录:(1)symbols 符号表如I40.1为第40个字节第1位(2)BLOCKS 功能块?手动组态:过程:打开S7-→新建文件-→INSERT-→STATION-→SIMATIC 300-→双击HARDWARE-→出现框-→INSERT-→HARDWARE COMPONENT-→PROFILE-→STANDARD-→S300-→RACK300选相应的位置(待置位表中),再在右侧相应的模块上双击就将模块选定,选好后再下载编程在进行PLC程序编制中,可采用以下三种形式:逻辑梯形图(LAD):语句表(STL):功能块图(FBD):语句表编程常用指令:与指令:A 常开AN 常闭或指令:O 常开ON 常闭输出指令:=调用指令:CALL FCXXFP:上升沿检测指令FN:下降沿检测指令FP后必须跟中间寄存器CLR 运算结果,清零SET 置1S 置位1R 清零块?STEP7中常用BLOCK主要有几种:OB组织块、FC功能块、FB功能块、DB数据块等OB:功能块,相当于主程序,常用的有OB1和OB100;FC、FB:功能块,相当于子程序在编完子程序后,必须在主程序中调用子程序OB100是PLC上电后先执行,只执行一次;OB1是PLC CPU循环执行的程序。
西门子840D系统讲义

SINUMERIK 840D系统培训讲义Edition 10.2003用户维修北京凯普精益机电技术有限公司第一章 SINUMERIK 840D系统的硬件构成一.SINUMERIK 840D系统的组成SINUMERIK 840D系统的硬件主要由下列几部分构成:1.NCU 数控单元(Numerical control unit)数字控制核心NCK的硬件装置。
NCU单元集成了SINUMERIK 840D数控CPU和S7-300的PLC CPU芯片,包括数控软件和PLC软件。
2.人机交互装置(MMC)SINUMERIK 840D系统可以使用MMC100.2、MMC103,PCU20,PCU50。
其人机操作界面可选OP031,OP032等。
其建立起SINUMERIK840D系统与操作人员之间的交互界面。
3.可编程序控制器PLCSINUMERIK 840D系统集成了S7-300-2DP的PLC,并通过通讯模块IM361扩展外部的I/O模块。
4.驱动装置SINUMERIK 840D系统可采用全数字伺服驱动SIMODRIVE611D,配以1FT,1FK系列进给电机和1PH系列的主轴电机。
二.SINUMERIK 840D系统的硬件安装SINUMERIK 840D系统各模块在安装排列时,最左侧通常为电源模块,其后为NCU控制板,MSD主轴驱动模块,FDD进给驱动模块。
通常,驱动模块遵循功率越大的模块越靠近左侧。
Fig. 1-1 840D系统连接图Fig.1-2 SINUMERIK 840常用组态方式三.NCU数控装置a)NCU的硬件版本NCU571.2 486DX2处理器,大到1.5MB的CNC存储器和288KB的用户存储器。
最多可控制十个坐标轴或主轴,一个通道。
NCU572 486DX2处理器,大到1.5MB的CNC存储器和288KB的用户存储器。
最多可控制十个坐标轴或主轴,二个通道。
NCU573.2 奔腾级处理器,大到1.5MB的CNC存储器和288KB的用户存储器。
SINUMERIK810D、840D参数体系及参数的调整
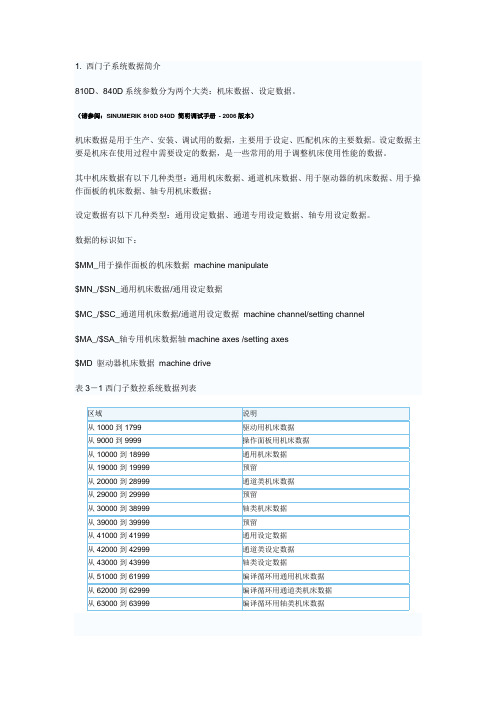
1. 西门子系统数据简介810D、840D系统参数分为两个大类:机床数据、设定数据。
(请参阅:SINUMERIK 810D 840D 简明调试手册- 2006版本)机床数据是用于生产、安装、调试用的数据,主要用于设定、匹配机床的主要数据。
设定数据主要是机床在使用过程中需要设定的数据,是一些常用的用于调整机床使用性能的数据。
其中机床数据有以下几种类型:通用机床数据、通道机床数据、用于驱动器的机床数据、用于操作面板的机床数据、轴专用机床数据;设定数据有以下几种类型:通用设定数据、通道专用设定数据、轴专用设定数据。
数据的标识如下:$MM_用于操作面板的机床数据machine manipulate$MN_/$SN_通用机床数据/通用设定数据$MC_/$SC_通道用机床数据/通道用设定数据machine channel/setting channel$MA_/$SA_轴专用机床数据轴machine axes /setting axes$MD 驱动器机床数据machine drive表3-1西门子数控系统数据列表2. 机床数据设定(请参阅:某数控机床SIEMENS810D系统参数备份)1) 通用MD(General):MD10000:此参数设定机床所有物理轴,如X轴。
通道MD(Channel Specific):MD20000 → 设定通道名CHAN1MD20050[n] → 设定机床所用几何轴序号,几何轴为组成笛卡尔坐标系的轴MD20060[n] → 设定所有几何轴名MD20070[n] → 设定对于此机床存在的轴的轴序号MD20080[n] → 设定通道内该机床编程用的轴名以上参数设定后,做一次NCK复位!2) 轴相关MD(Axis-specific):MD30130 -→设定轴指令端口=1MD30240 -→设定轴反馈端口=1如此二参数为“0”,则该轴为仿真轴。
此时,再一次NCK复位,这是会出现300007报警。
课题三SINUMERIK840D系统的硬件

课题三 SINUMERIK 840D系统的硬件西门子公司数控系统发展:3、8、810、820、850、880、805、840C、810D、840D、FM-NC、802S、802C、802D、840Di等系统。
算机化,驱动的模块化,控制与驱动接口的数字化。
一、系统的特点及主要功能1、控制类型模块化32位微处理器,车、钻、铣、磨,CNC连续路径控制以及集成式功能强大的PLC控制。
2、显示功能屏幕文字有多种语言:可在任意两种语言间随时切换(英语、德语、西班牙语、法语、意大利语、中文);屏幕可显示报警及信息内容;可显示坐标实际值和剩余距离值,并具有屏幕保护功能。
3、操作功能按操作区域划分为MACHINE(加工),PARAMETER(参数),PROGRAM(程序),SERVICES(服务),DIAGNOSIS (诊断),START-UP(启动);可使用16+4个软键进行软键菜单操作。
4、操作方式操作方式有四种:JOG(手动)方式;TEACH IN(示教)方式;MDA(手动数据输入运行)方式;AUTO (加工程序自动运行)方式。
5、系统高度集成NC和PLC集成在一块NCU板中。
6、控制轴数最多10个方式组(通道用方式组来组织,方式组可分配通道,1个方式组相当于1台机床),10个通道(1个通道是1个插补器,可分配12个轴),31个进给轴/主轴(含12个主轴),每通道最多12轴,可实现12轴插补联动。
7、进给及快进速度最小进给速度:0.001mm/min;最大快进速度:999m/min。
8、PLC采用集成式S7—300 PLC,I/O模块可以扩展到2048输入/输出点,STEP7编程语言(WINXP操作系统,V5.3版本)。
9、611D伺服驱动装置的数字化接口611D伺服驱动装置通过驱动总线与840D系统数字连接,启动软件安装在840D系统上,可以快速、简单的启动和优化611D驱动单元。
10、网络功能有以太网接口,可以组建车间内局域网,并可与外网络相接,实现远程诊断。
2_840D系统介绍

840D系统控制部分
SINUMERIK 840D
1.NCU
Numerical control kernel 数字控制内核 轴/主轴的进给、控制 2.MMC —— Man machine communication 人机界面 数控系统的用户界面(操作、启动、编程、通讯等) 3.PLC 通道/轴配置、刀库管理、润滑油添加、换刀等
10,4" TFT color
OP 031
OP 032S
OP 030
Handholds
Siemens Factory Automation Engineering Ltd.
Page 12 of 15
November 2004
Let’s Win Together
Automation and Drives
Let’s Win Together
Automation and Drives
标准MCP面板
SINUMERIK 840D
铣床版(M)
车床版(T)
S3开关的意义
Siemens Factory Automation Engineering Ltd.
Page 19 of 15 November 2004
Automation and Drives
SINUMERIK 840D 维修与调整培训
西门子工厂自动化工程有限公司
Let’s Win Together
Automation and Drives
Siemens自动化产品的构成
SINUMERIK 840D
SINUMERIK SIMATIC SIMODRIVE
Siemens Factory Automation Engineering Ltd.
840d系统硬件介绍

Apr.,15th, 2010
第一部分: 第一部分:810d/840d数控系统模块介绍 数控系统模块介绍
西门子810d/840d数控系统的构成 数控系统的构成 西门子
SFAE
YAN ZUDONG
Apr.,15th, 2010
第一部分: 第一部分:810d/840d数控系统模块介绍 数控系统模块介绍
Apr.,15th, 2010
第一部分: 第一部分:810d/840d数控系统模块介绍 数控系统模块介绍
核心处理部件CCU/NCU 核心处理部件
SFAE
YAN ZUDONG
Apr.,15th, 2010
第一部分: 第一部分:810d/840d数控系统模块介绍 数控系统模块介绍
核心处理部件CCU/NCU 核心处理部件
PLC模块 模块
SFAE
YAN ZUDONG
Apr.,15th, 2010
第一部分: 第一部分:810d/840d数控系统模块介绍 数控系统模块介绍
PLC模块 模块
SFAE
YAN ZUDONG
Apr.,15th, 2010
第一部分: 第一部分:810d/840d数控系统模块介绍 数控系统模块介绍
系统电源连接
SFAE
YAN ZUDONG
Apr.,15th, 2010
Thank You! !
Protection notice / Copyright notice
�
MCP483
Apr.,15th, 2010
第一部分: 第一部分:810d/840d数控系统模块介绍 数控系统模块介绍
西门子810d/840d数控系统的构成 数控系统的构成 西门子
EFP单I/O模块 单 模块
西门子840D系统的组成介绍

4 丰富的数控功能 利用计算机强大的计算功能可以实现复杂的数控功能, 且能提供大量的辅助功能,简化程序的编制。 5 使用维护方便 各种诊断程序能显示故障信息,使操作和维护人员能够 及时了解故障的原因,减少维修停机时间。
4
第二节
西门子840D简介
它是90年代中期新设计的全数字化数控系统,具有高度模块 化及规范化的结构,它将CNC和驱动控制集成在一块板上,将闭 环控制的全部硬件的软件集成,便于操作、编程的监控。
5 MMC模块 即”人机通信界面“模块。包括显示器、NC操作界面、机床操作 界面及磁盘驱动器等接口。 一 NC模块 NC模块
(1)
6
7
一 1 2 3 4 5
NC模块 X101 操作面板接口端,通过电缆与MMC (人机通信接口板)及机床操作面板联接。 X102 RS-485通信接口端。 X111 PLCS7-300输入/输出接口端,该端 口提供了与PLC联接的通道。 X112 RS232通信接口端,实现与外部的通 信。 X121 多路输入/输出接口端,通过该端口数 控系统可与多种外设联接,如与控制进给运 动的手轮、CNC输入/输出的联动。 X122 PLC编程器PG接口端,通过该接口 与西门子PLC编程器PG联接,以此传输PG 中的PLC程序到NC模块。
4 5 6 7
9
三 伺服电动机驱动模块 如图所示为单轴驱动模块 611D 1 X411、X412 电动机 内置光电编码器反馈至 该端口进行位置的速度 反馈的处理。 X421、X422 机床拖板 直接位置反馈端口。 X431 脉冲使能端口, 一般由PLC给出。 X432 高输入输出接口 端。 X34、X35 电压检测 孔,一般供模块维修检 测使用,用户不得使用。
2 3 4 5
西门子840D数控系统参数优化分析与研究
西门子840D数控系统参数优化分析与研究摘要:随着工业生产技术的进步,复杂多平面、多曲面零件的精密性成为机械加工行业攻坚克难的关键技术,研制出高精度的数控机床是其最重要解决手段之一。
数控机床的数控系统控制参数的优化对机床的性能提高有着非常重大的意义,但系统参数优化一定要根据客观情况出发,尽可能最大限度的发挥机床的性能。
由于本公司搬迁且已投入使用的设备多为西门子840D数控系统,因此本文主要就西门子840D数控系统参数优化为课题进行分析探究,并提出一些个人观点,以供参考。
关键词:西门子840D;数控系统;参数优化;1西门子840D数控系统的组成西门子840D是由数控及驱动单元(CCU或NCU)MMC,PLC模块三部分组成,由于在集成系统时总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起并用设备总线互相连接,因此在说明时将二者划归一处。
1.1人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:包括OP单元MMC,MCP三部分。
1.1.1MMCMMC实际上就是一台计算机有自己独立的CPU,还可以带硬盘带软驱;OP单元正是这台带有西门子MMC的控制软件的计算机的显示器。
我们常用的MMC有两种:MMC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾可以带硬盘。
一般情况,为西门子840D系统配MMC103。
PCU是专门为配合西门子的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,;PCU50、PCU70对应于MMC103且PCU50的软件是基于WINDOWS NT的。
PCU的软件HMI又分为两种:嵌入式HMI和高级HMI。
一般标准供货时PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载高级HMI。
西门子840D系统的组成
西门子840D系统的组成SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。
●人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP(Machine Control Panel)三部分。
MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
1.MMC我们最常用的MMC有两种:MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103.※PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU2 0、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。
PCU的软件被称作HMI,HMI有分为两种:嵌入式HMI和高级HMI。
一般标准供货时,PCU20装载的是嵌入式 HMI,而P CU50和PCU70则装载高级HMI.2.OPOP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。
根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S 等,其中OP031最为常用。
西门子840D系统通道、方式组功能
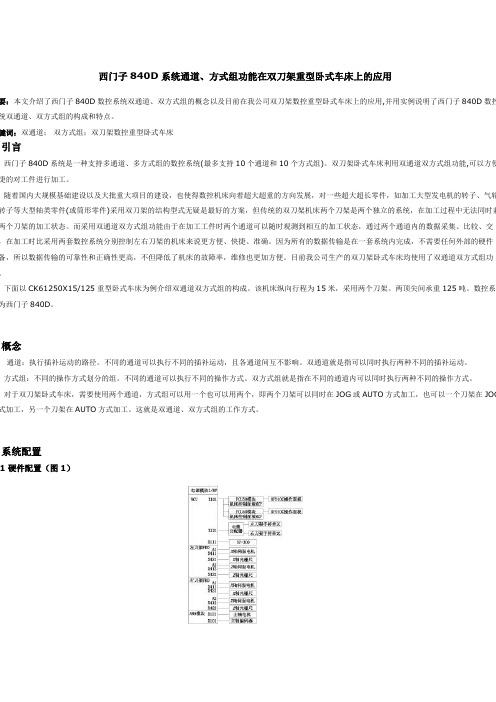
西门子840D系统通道、方式组功能在双刀架重型卧式车床上的应用要:本文介绍了西门子840D数控系统双通道、双方式组的概念以及目前在我公司双刀架数控重型卧式车床上的应用,并用实例说明了西门子840D数控统双通道、双方式组的构成和特点。
键词:双通道;双方式组;双刀架数控重型卧式车床引言西门子840D系统是一种支持多通道、多方式组的数控系统(最多支持10个通道和10个方式组)。
双刀架卧式车床利用双通道双方式组功能,可以方便捷的对工件进行加工。
随着国内大规模基础建设以及大批重大项目的建设,也使得数控机床向着超大超重的方向发展,对一些超大超长零件,如加工大型发电机的转子、气轮转子等大型轴类零件(或筒形零件)采用双刀架的结构型式无疑是最好的方案,但传统的双刀架机床两个刀架是两个独立的系统,在加工过程中无法同时兼两个刀架的加工状态。
而采用双通道双方式组功能由于在加工工件时两个通道可以随时观测到相互的加工状态,通过两个通道内的数据采集、比较、交,在加工时比采用两套数控系统分别控制左右刀架的机床来说更方便、快捷、准确。
因为所有的数据传输是在一套系统内完成,不需要任何外部的硬件备,所以数据传输的可靠性和正确性更高,不但降低了机床的故障率,维修也更加方便。
目前我公司生产的双刀架卧式车床均使用了双通道双方式组功。
下面以CK61250X15/125重型卧式车床为例介绍双通道双方式组的构成。
该机床纵向行程为15米,采用两个刀架。
两顶尖间承重125吨。
数控系为西门子840D。
概念通道:执行插补运动的路径。
不同的通道可以执行不同的插补运动,且各通道间互不影响。
双通道就是指可以同时执行两种不同的插补运动。
方式组:不同的操作方式划分的组。
不同的通道可以执行不同的操作方式。
双方式组就是指在不同的通道内可以同时执行两种不同的操作方式。
对于双刀架卧式车床,需要使用两个通道,方式组可以用一个也可以用两个,即两个刀架可以同时在JOG或AUTO方式加工,也可以一个刀架在JOG 式加工,另一个刀架在AUTO方式加工。
第一章西门子840D与810D数控系统安装与调试

1)X411~,也可以是间接获得的。所谓直接获得就是指位置信 号取自丝杠上光栅尺的位置反馈信号,即全闭环控制,也称第 二测量系统。而间接获得就是指位置信号取自电动机上的旋转 编码器,即半闭环控制,也称第一测量系统。
图1-5 SINUMERIK 810D CCU3 接口图
6)H1/H2、H3、S1、S3、S4 的功能基本与840D 相同,但有一点不同, 即H1 排的第三个LED 灯是SF、而不是CF,该红色灯反映了驱动的故障,而 且810D 无S2。 7)X351 对应第一路模拟信号DAC1,标准设置为电流设定值信号;X352 对应第二路模拟信号DAC2,标准设置为速度设定值信号;X341 对应第三路 模拟信号DAC3,标准设置为速度实际值信号;具体的物理量可在MMC 的菜 单中选择,X342 是信号的地。 8)X431 是终端块,其中663 是脉冲使能终端,必须和端子9(使能电压端 子24V)相连,断开时控制使能失效,电动机制动开关释放。AS1、AS2 的 内部有一副常闭触点,启动后打开。B 端子(BERO)可输入外部零点标记。 端子19 为使能电压24V 的参考地。 9)X151 是设备总线,34 芯插座,最大传送距离10m,用于连接611D 电 源模块上的设备总线接口X351。 10)X304~X306 是轴扩展模块的接口,X304 与X414 相对应,X305 与 X415 相对应,X306与X416 相对应。 11)PCMCIA 是个人计算机存储卡,可存放810D 系统软件或存储数据使用。
840D数控系统的基本构成
——西门子数控系统调试,编程和维修概要西门子840D系统的组成SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。
●人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP(Machine Control Panel)三部分。
MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
1.MMC我们最常用的MMC有两种:MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103.※PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。
PCU的软件被称作HMI,HMI有分为两种:嵌入式HMI和高级HMI。
一般标准供货时,PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载高级HMI.2.OPOP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。
根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031最为常用。
西门子840D系统的组成介绍全解
2
第一节 概述
一 CNC系统的组成
可编程逻辑控制器LPC处于CNC装置和机床之间,主要是对CNC装置和机床 的输入、输出信号进行处理,用PLC程序代替以往的继电器线路,实现M、S、 T功能的控制和译码,即按照预先规定的控制逻辑对主轴的起停、转向、转速, 刀具的更换、工件的夹紧、松开,液压、气动、冷却、润滑系统的运行等进行 控制。 主轴驱动装置控制主轴的旋转运动,而进给驱动装置控制机床各坐标轴的切 削进给运动。 二 CNC系统的优点 1 灵活性 由于采用了计算机技术,硬件、软件设计采用模块化结构,只 需改变相应的硬件模块,改变相应的控制软件,就可以改变CNC系统的功能, 从而满足用户不同的要求。 2 可靠性 随着大规模集成电路、超大规模集成电路芯片的发展,硬件使 用的元件数量少、质量高,可靠性获得了极大的提高。
5 MMC模块 即”人机通信界面“模块。包括显示器、NC操作界面、机床操作 界面及磁盘驱动器等接口。 一 NC模块 NC模块
(1)
6
7
一 1 2 3 4 5
NC模块 X101 操作面板接口端,通过电缆与MMC (人机通信接口板)及机床操作面板联接。 X102 RS-485通信接口端。 X111 PLCS7-300输入/输出接口端,该端 口提供了与PLC联接的通道。 X112 RS232通信接口端,实现与外部的通 信。 X121 多路输入/输出接口端,通过该端口数 控系统可与多种外设联接,如与控制进给运 动的手轮、CNC输入/输出的联动。 X122 PLC编程器PG接口端,通过该接口 与西门子PLC编程器PG联接,以此传输PG 中的PLC程序到NC模块。
3
第一节 概述
一 CNC系统的组成
可编程逻辑控制器LPC处于CNC装置和机床之间,主要是对CNC装置和机床 的输入、输出信号进行处理,用PLC程序代替以往的继电器线路,实现M、S、 T功能的控制和译码,即按照预先规定的控制逻辑对主轴的起停、转向、转速, 刀具的更换、工件的夹紧、松开,液压、气动、冷却、润滑系统的运行等进行 控制。 主轴驱动装置控制主轴的旋转运动,而进给驱动装置控制机床各坐标轴的切 削进给运动。 二 CNC系统的优点 3 通用性 求。 硬件采用模块化后,能很方便地进行扩展以满足不同系统的要
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西门子840D系统的组成SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。
●人机界面人机交换界面负责NC数据的输入和显示,它由MMC和OP组成:MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP(Machine Control Panel)三部分。
MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。
1.MMC我们最常用的MMC有两种:MMCC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103. PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、OP10C、OP12、OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC 不同的是:PCU50的软件是基于WINDOWS NT的。
PCU的软件被称作HMI,HMI有分为两种:嵌入式HMI和高级HMI。
一般标准供货时,PCU20装载的是嵌入式HMI,而PCU50和PCU70则装载高级HMI.2.OPOP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。
根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031最为常用。
3.MCPMCP是专门为数控机床而配置的,它也是OPI上的一个节点,根据应用场合不同,其布局也不同,目前,有车床版MCP和铣床版MCP两种。
对810D和840D,MCP的MPI地址分别为14和6,用MCP后面的S3开关设定。
对于SINUMERIK840D应用了MPI(Multiple Point Interface)总线技术,传输速率为187.5k/秒,OP单元为这个总线构成的网络中的一个节点。
为提高人机交互的效率,又有OPI(Operator PanelInterface)总线,它的传输速率为1.5M/秒。
●数控及驱动单元1.NCU数控单元SINUMERIK840D的数控单元被称为NCU(Numenrical Controlunit)单元:中央控制单元,负责NC所有的功能,机床的逻辑控制,还有和MMC的通讯它由一个COM CPU板. 一个PLC CPU 板和一个DRIVE板组成。
根据选用硬件如CPU芯片等和功能配置的不同,NCU分为NCU561.2,NCU571.2,NCU572.2,NCU573.2(12轴),NCU573.2(31轴)等若干种,同样,NCU 单元中也集成SINUMERIK840D数控CPU和SIMATIC PLC CPU芯片,包括相应的数控软件和PLC控制软件,并且带有MPI或Profibus借口,RS232借口,手轮及测量接口,PCMCIA卡插槽等,所不同的是NCU单元很薄,所有的驱动模块均排列在其右侧。
2.数字驱动数字伺服:运动控制的执行部分,由611D伺服驱动和1FT6(1FK6)电机组成SINUMERIK840D配置的驱动一般都采用SIMODRIVE611D.它包括两部分:电源模块+驱动模块(功率模块)。
电源模块:主要为NC和给驱动装置提供控制和动力电源,产生母线电压,同时监测电源和模块状态。
根据容量不同,凡小于15KW均不带馈入装置,极为U/E电源模块;凡大于15KW 均需带馈入装置,记为I/RF电源模块,通过模块上的订货号或标记可识别。
611D数字驱动:是新一代数字控制总线驱动的交流驱动,它分为双轴模块和单轴模块两种,相应的进给伺服电机可采用1FT6或者1FK6系列,编码器信号为1Vpp正弦波,可实现全闭环控制。
主轴伺服电机为1PH7系列。
●PLC模块SINUMERIK810D/840D系统的PLC部分使用的是西门子SIMATIC S7-300的软件及模块,在同一条导轨上从左到右依次为电源模块(Power Supply),接口模块(Interface Module)机信号模块(Signal Module)。
的CPU与NC的CPU是集成在CCU或NCU中的电源模块(PS)是为PLC和NC提供电源的+24V和+5V。
接口模块(IM)是用于级之间互连的。
信号模块(SM)使用与机床PLC输入/输出的模块,有输入型和输出型两种。
硬件的接口一.840D系统的接口840D系统的MMC,HHU,MCP都通过一根MPI电缆挂在NCU上面,MPI是西门子PLC的一个多点通讯协议,因而该协议具有开放性,而OPI是840D系统针对NC部分的部件的一个特殊的通讯协议,是MPI的一个特例,不具有开放性,它比传统的MPI通讯速度要快,MPI的通讯速度是187.5K波特率,而OPI是1.5M。
NCU上面除了一个OPI端口外,还有一个MPI,一个Profibus接口,Profibus接口可以接所有的具有Profibus通讯能力的设备。
Profibus的通讯电缆和MPI的电缆一样,都是一根双芯的屏蔽电缆。
在MPI,OPI和Profibus的通讯电缆两端都要接终端电阻,阻值是220欧,所有如果要检测电缆的好坏情况,可以在NCU端打开插座的封盖,量A,B两线间的电阻,正常情况下应该为110欧。
二.611系列驱动的组成与接口1.611系列的驱动分成模拟611A,数字611D和通用型611U。
都是模块化结构,主要有以下几个模块组成:•电源模块电源模块是提供驱动和数控系统的电源,包括维持系统正常工作的弱电和供给功率模块用的600V直流电压。
根据直流电压控制方式,它又分为开环控制的UE模块和闭环控制的I/R模块,UE模块没有电源的回馈系统,其直流电压正常时为570V左右,而当制动能量大时,电压可高达640多伏。
I/R模块的电压一直维持在600V左右•控制模块控制模块实现对伺服轴的速度环和电流环的闭环控制•功率模块对伺服电机提供频率和电压可变的交流电源•监控模块主要是对电源模块弱电供电能力的补充。
•滤波模块对电源进行滤波作用。
•电抗对电压起到平稳作用。
2.611电源模块的接口信号611模块的接口信号有以下几组:(1)电源接口U1 V1 W1:主控制回路三相电输入端口X181:工作电源的输入端口,使用时常常与主电源短接,有的系统为了让机床在断电后驱动还能正常工作一段时间,把600V的电压端子与P500 M500端子短接,这样由于600V电压不能马上放电完毕,还能维持驱动控制板的正常工作一段时间。
P600M600是600V直流电压输出端子。
(2)控制接口64:控制使能输入,该信号同时对所有连接的模块有效,该信号取消时,所有的轴的速度给定电压为零,轴以最大的加速度停车。
延迟一定的时间后,取消脉冲使能63:脉冲使能输入,该信号同时对所有连接的模块有效,该信号取消后,所有的轴的电源取消,轴以自由运动的形式停车。
48:主回路继电器,该信号断开时,主控制回路电源主继电器断开。
112:调试或标准方式,该信号一般用在传输线的调试中,一般情况接到系统的24V上。
X121:模块准备好信号和模块的过热信号。
准备号信号与模块的拨码开关的设置有关,当S1.2=ON时,模块有故障时,准备好信号取消,而S1.2=OFF时,模块有故障和使能(63,64)信号取消时,都会取消准备好信号,因此在更换该模块的时候要检查模块顶部的拨码开关的设置,否则模块可能会工作不正常。
所有的模块过载和连接的电机过热都会触发过热报警输出。
NS1/NS2:主继电器闭合使能,只有该信号为高电平时,主继电器才可能得电。
该信号常用来作主继电器闭合的连锁条件。
AS1/AS2:主继电器状态,该信号反映主继电器的闭合状态,主继电器闭合时为高电平。
9/19/R:9是24V输出电压,19是24V的地,R为模块的报警复位信号。
(3)其它辅助接口X351:设备总线,为后面连接的模块供电用。
X141:电压检测端子,供诊断和其它用途用。
»7:P24 ,+24V »45:P15,+15V »44:N15,-15V»10:N24,-24V »15:M,0V电源模块上面有6个指示灯,分别指示模块的故障和工作状态。
一般正常情况下绿灯亮表示使能信号丢失(63和64),黄灯亮表示模块准备好信号,这时600V直流电压已经达到系统正常工作的允许值。
电源模块正常工作的使能条件:48,112,63,64接高电平,NS1和NS2短接,显示为一个黄灯亮,其它灯都不亮。
直流母线电压应在600V左右.3.611驱动控制模块接口信号(1)611D驱动控制模块接口信号控制模块与数控系统主要是通过一根数据总线相连,基本没有太多的接口信号。
X431:轴脉冲使能,该信号为低电平时,该轴的电源撤消,一般这个信号直接与24V短接X432:BERO 端子,该接口用作BERO开关信号的输入口。
X34,X35模拟输出口,其中有两个模拟口(X1,X2 )用作模块诊断测试用,它可以用来跟踪一些数字量,比如转速,电压和电流等并把它转换成0到5V的模拟电压输出,具体的输出信号可以通过数控系统选择,Ir模拟输出口是固定输出电机R相的电流的模拟值。
X411:电机编码器接口,输入电机的编码器信号,还有电机的热敏电阻,其中电机的热敏电阻值是通过该插座的13和25脚输入,该热敏电阻在常温下为580欧,155度时大于1200欧,这时控制板关断电机电源并产生电机过热报警。
(1PH7电机温度检测信号连接同1FT6/1FK6电机)X411:直接测量系统输入口,输入直接位置测量信号,一般为正余弦电压信号*611D的控制板的速度环和电流环的参数设置在NCK里面,故更换控制板后不需要重新设置参数。
(2)611A控制模块接口信号控制模块与1FT5电机构成伺服驱动机构,完成速度环和电流环的控制,其速度环和电流环的参数都保存在控制板上,故更换该板要注意参数的设置。
接口信号如下:X311:电机反馈接口,电机的速度实际值和电机的热敏电阻值都通过它输入到控制板里,1FT5电机的速度检测是通过一个测速发电机来实现的,而电机转子的位置是通过18个霍而元件来检测的。