分布式网络5
PowerXL系列分布式驱动器Rapid Link 5 RAMO5 RASP5产品样本说明书

Rapid Link 5RAMO5RASP5产品样本PowerXL系列分布式驱动器Rapid Link 5目录系统概览 (3)Rapid Link 5产品型号说明 (4)马达起动器 RAMO 5 (5)带 AS-Interface 通信 (5)带 Ethernet/IP 通信 (6)带 Profinet 通信 (6)变频器 RASP 5 (7)带 AS-Interface 通信 (7)带 Ethernet/IP 通信 (9)带 Profinet 通信 (10)附件 (12)尺寸 (14)系统概览Rapid Link 5产品:1)马达起动器RAMO5:电子式直接起动器或可逆起动器2)变频器 RASP5动力母线:3)供电电源 (3 AC N/PE 400/480 V, 50/60 Hz)4)扁平电缆供电连接器5)400/480 V 扁平电缆6)扁平电缆终端7)扁平电缆连接器8)至扁平电缆连接器的电源连接电缆9)400/480 V 圆形电缆10)圆形电缆连接器11)至圆形电缆连接器的电源连接电缆12)圆形电缆连接器(Powerbox)13)至Powerbox的电源连接电缆数据总线:14)AS-Interface15)AS-Interface电缆16)M12连接器17)带M12 插头的电缆马达连接:18)非屏蔽马达电缆 (用于RAMO5)19)屏蔽的马达电源电缆 (用于RASP5)20)传感器连接,带 M12 插头连接器21)带M12 插头连接器的执行器连接 (用于RAMO5)22)STO 连接器 (用于RASP5)23)外部键盘 DX-KEY-OLED24)蓝牙通信棒 DX-COM-STICK3-KIT数据概览 3PowerXL Rapid Link 53产品型号说明D 2RAMO5 -RASP 5 ---A31A3124000000000512512S1S1D W = 直接起动器 (单转向) = 可逆起动器 (正反转)2 458= 2,4 A (0,75 kW @ 400V)= 4,3 A (1,5 kW @ 400V)= 5,6 A (2,2 kW @ 400V)= 8,5 A (4,0 kW @ 400V)0 124= 无马达制动控制= 180/207 V DC 马达制动控制= 230/277 V AC 马达制动控制= 400/480 V AC 马达制动控制A31PNT EIP = ASI-3 Profil S-7.4= PROFINET = Ethernet/IP4= 4 个传感器输入 (2 x M12, 4个引脚分配)0 2= 0 个执行器输出 (0 x M12)= 2 个执行器输出 (1 x M12, 4 个引脚分配)0 R = 无维修开关= 带维修开关0 1= 无风扇= 带风扇 (仅 4,0kW)0 1= 无STO = 带 STO 0 1= 无制动电阻= 带制动电阻0 R = 无维修开关= 带维修开关512412= HAN Q5, 底部接口= HAN Q4/2, 底部接口A31A32PNT EIP = ASI-3 配置文件 S-7.4= ASI-3 配置文件 S-7.A.E = PROFINET = Ethernet/IP512412= HAN Q5, 底部接口= HAN Q4/2, 底部接口2 4= 2 个传感器输入 (2 x M12, 2个引脚分配) = 4 个传感器输入 (2 x M12, 4个引脚分配)0 12= 0 个执行器输出 (0 x M12)= 1 个执行器输出 (1 x M12, 2个引脚分配)= 2 个执行器输出 (1 x M12, 4 个引脚分配)0 124= 无马达制动控制= 180/207 V DC 马达制动控制= 230/277 V AC 马达制动控制= 400/480 V AC 马达制动控制标准,版本1标准,版本1数据概览 4PowerXL Rapid Link 5RAMO5电子式马达起动器RASP5变频器4注:产品运行最高环境温度55°CAS-Interface直接起动器可逆起动器额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出AS- Interface配置文件无维修开关带维修开关无维修开关带维修开关lₑ[A] P[kW]P[HP](50/60Hz)传感器输入驱动器输出5)S-7.4–31个站点S-7.A.E.–62个站点产品编号订货号产品编号订货号产品编号订货号产品编号订货号6,60,09-30,125-3- 2 0 x - RAMO5-D200A31-5120S1198517RAMO5-D200A31-512RS1198518RAMO5-W200A31-5120S1198529RAMO5-W200A31-512RS11985302 0 x - RAMO5-D200A31-4120S1199060RAMO5-D200A31-412RS1199069RAMO5-W200A31-4120S1199080RAMO5-W200A31-412RS11990992 1 x - RAMO5-W210A31-4120S1199084 RAMO5-W210A31-412RS1 1991032 0 - x RAMO5-D200A32-4120S1199064 RAMO5-D200A32-512RS1199073RAMO5-W200A32-5120S1199088RAMO5-W200A32-512RS11991072 0 - x RAMO5-D200A32-412RS1199075RAMO5-W200A32-4120S1199090RAMO5-W200A32-412RS11991092 1 - x RAMO5-W210A32-4120S1199094RAMO5-W210A32-412RS1 199113180/207V DC 2 0x-RAMO5-D201A31-4120S1199061RAMO5-D201A31-512RS1199068RAMO5-W201A31-5120S1199079RAMO5-W201A31-512RS11990982 0x-RAMO5-D201A31-412RS1199070RAMO5-W201A31-4120S1199081RAMO5-W201A31-412RS11991002 1x-RAMO5-W211A31-4120S1199085RAMO5-W211A31-412RS1 1991042 0-x RAMO5-D201A32-4120S1199065RAMO5-D201A32-512RS1199074RAMO5-W201A32-5120S1199089RAMO5-W201A32-512RS11991082 0-x RAMO5-D201A32-412RS1199076RAMO5-W201A32-4120S1199091RAMO5-W201A32-412RS11991102 1-x RAMO5-W211A32-4120S1199095RAMO5-W211A32-412RS1 199114230/277V AC20x-RAMO5-D202A31-5120S1198519RAMO5-D202A31-512RS1198520RAMO5-W202A31-5120S1198531RAMO5-W202A31-512RS119853220x-RAMO5-D202A31-4120S1199062RAMO5-D202A31-412RS1199071RAMO5-W202A31-4120S1199082RAMO5-W202A31-412RS119910121x-RAMO5-D212A31-5120S1198527RAMO5-W212A31-5120S1 19853921x-RAMO5-W212A31-4120S1199086RAMO5-W212A31-412RS1 19910520-x RAMO5-D202A32-5120S1198521RAMO5-D202A32-512RS1198522RAMO5-W202A32-5120S1198533RAMO5-W202A32-512RS119853420-x RAMO5-D202A32-4120S1199066RAMO5-D202A32-412RS1199077RAMO5-W202A32-4120S1199092RAMO5-W202A32-412RS119911121-x RAMO5-W212A32-5120S119854021-x RAMO5-W212A32-4120S1199096RAMO5-W212A32-412RS1 199115400/480V AC20x-RAMO5-D204A31-5120S1198523RAMO5-D204A31-512RS1198524RAMO5-W204A31-5120S1198535RAMO5-W204A31-512RS119853620x-RAMO5-D204A31-4120S1199063RAMO5-D204A31-412RS1199072RAMO5-W204A31-4120S1199083RAMO5-W204A31-412RS119910221x-RAMO5-D214A31-5120S1198528RAMO5-W214A31-5120S1 19854121x-RAMO5-W214A31-4120S1199087RAMO5-W214A31-412RS1 19910620-x RAMO5-D204A32-5120S1198525RAMO5-D204A32-512RS1198526RAMO5-W204A32-5120S1198537RAMO5-W204A32-512RS119853820-x RAMO5-D204A32-4120S1199067RAMO5-D204A32-412RS1199078RAMO5-W204A32-4120S1199093RAMO5-W204A32-412RS119911221-x RAMO5-W214A32-4120S1199097RAMO5-W214A32-412RS1 199116说明1) 0,3 - 6,6可调2) 参考常规内部或外部通风的4极三相异步电动机,50 Hz或60 Hz3) 在 400V, 50 Hz; 在 440 - 480V, 60 Hz4) 用于驱动带机械制动的马达5) 运行时带外部24-V-DC 电源数据概览 5马达起动器 RAMO 55数据概览 6马达起动器 RAMO 5直接起动器可逆起动器额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出无维修开关带维修开关无维修开关带维修开关l ₑ [A]P [kW] P [HP](50/60Hz)传感器输入驱动器输出5)产品编号订货号产品编号订货号产品编号订货号产品编号订货号6,60,09-30,125-3-42RAMO5-D420EIP-412RS1199117RAMO5-W420EIP-412RS1199121180/207V DC 42RAMO5-D421EIP-412RS1199118RAMO5-W421EIP-412RS1199122230/277V AC 42RAMO5-D422EIP-412RS1199119RAMO5-W422EIP-412RS1199123400/480V AC42RAMO5-D424EIP-412RS1199120RAMO5-W424EIP-412RS1199124直接起动器可逆起动器额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出无维修开关带维修开关无维修开关带维修开关l ₑ [A]P [kW]P [HP](50/60Hz)传感器输入执行器输出5)产品编号订货号产品编号订货号产品编号订货号产品编号订货号6,60,09-30,125-3-42RAMO5-D420PNT-4120S1199125RAMO5-D420PNT-412RS1199129RAMO5-W420PNT-4120S1199133RAMO5-W420PNT-412RS1199137180/207V DC 42RAMO5-D421PNT-4120S1199126RAMO5-D421PNT-412RS1199130RAMO5-W421PNT-4120S1199134RAMO5-W421PNT-412RS1199138230/277V AC 42RAMO5-D422PNT-4120S1199127RAMO5-D422PNT-412RS1199131RAMO5-W422PNT-4120S1199135RAMO5-W422PNT-412RS1199139400/480V AC42RAMO5-D424PNT-4120S1199128RAMO5-D424PNT-412RS1199132RAMO5-W424PNT-4120S1199136RAMO5-W424PNT-412RS1199140说明1) 0,3 - 6,6可调2)参考常规内部或外部通风的4极三相异步电动机,50 Hz 或60 Hz3)在 400V, 50 Hz; 在 440 - 480V, 60 Hz 4)用于驱动带机械制动的马达5)运行时带外部24-V-DC 电源Ethernet/IPProfinet6AS-Interface无内部制动电阻带内部制动电阻5)额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出AS-Interface配置文件STO无维修开关带维修开关无维修开关带维修开关lₑ[A] P[kW]P[HP](50/60Hz)传感器输入驱动器输出5)S-7.4–31个站点安全扭矩关闭产品编号订货号产品编号订货号产品编号订货号产品编号订货号2,40,751- 40 x 0RASP5-2400A31-5120000S1198542RASP5-2400A31-512R000S1198548RASP5-2400A31-5120100S1198545RASP5-2400A31-512R100S119855140 x 0RASP5-2400A31-4120000S1198728RASP5-2400A31-412R000S1198744RASP5-2400A31-4120100S1198732RASP5-2400A31-412R100S119874840 x 1RASP5-2400A31-4120010S1198736RASP5-2400A31-412R010S1198752RASP5-2400A31-4120110S1198740RASP5-2400A31-412R110S1198756180/207V DC40x0RASP5-2401A31-5120000S1198724RASP5-2401A31-512R000S1198726RASP5-2401A31-5120100S1198725RASP5-2401A31-512R100S119872740x0RASP5-2401A31-4120000S1198729RASP5-2401A31-412R000S1198745RASP5-2401A31-4120100S1198733RASP5-2401A31-412R100S119874940x1RASP5-2401A31-4120010S1198737RASP5-2401A31-412R010S1198753RASP5-2401A31-4120110S1198741RASP5-2401A31-412R110S1198757230/277V AC40x0RASP5-2402A31-5120000S1198543RASP5-2402A31-512R000S1198549RASP5-2402A31-5120100S1198546RASP5-2402A31-512R100S119855240x0RASP5-2402A31-4120000S1198730RASP5-2402A31-412R000S1198746RASP5-2402A31-4120100S1198734RASP5-2402A31-412R100S119875040x1RASP5-2402A31-4120010S1198738RASP5-2402A31-412R010S1198754RASP5-2402A31-4120110S1198742RASP5-2402A31-412R110S1198758400/480V AC40x0RASP5-2404A31-5120000S1198544RASP5-2404A31-512R000S1198550RASP5-2404A31-5120100S1198547RASP5-2404A31-512R100S119855340x0RASP5-2404A31-4120000S1198731RASP5-2404A31-412R000S1198747RASP5-2404A31-4120100S1198735RASP5-2404A31-412R100S119875140x1RASP5-2404A31-4120010S1198739RASP5-2404A31-412R010S1198755RASP5-2404A31-4120110S1198743RASP5-2404A31-412R110S11987594,31,52-40x0RASP5-4400A31-5120000S1198554RASP5-4400A31-512R000S1198560RASP5-4400A31-5120100S1198557RASP5-4400A31-512R100S119856340x0RASP5-4400A31-4120000S1198764RASP5-4400A31-412R000S1198780RASP5-4400A31-4120100S1198768RASP5-4400A31-412R100S119878440x1RASP5-4400A31-4120010S1198772RASP5-4400A31-412R010S1198788RASP5-4400A31-4120110S1198776RASP5-4400A31-412R110S1198792180/207V DC40x0RASP5-4401A31-5120000S1198760RASP5-4401A31-512R000S1198762RASP5-4401A31-5120100S1198761RASP5-4401A31-512R100S119876340x0RASP5-4401A31-4120000S1198765RASP5-4401A31-412R000S1198781RASP5-4401A31-4120100S1198769RASP5-4401A31-412R100S119878540x1RASP5-4401A31-4120010S1198773RASP5-4401A31-412R010S1198789RASP5-4401A31-4120110S1198777RASP5-4401A31-412R110S1198793230/277V AC40x0RASP5-4402A31-5120000S1198555RASP5-4402A31-512R000S1198561RASP5-4402A31-5120100S1198558RASP5-4402A31-512R100S119856440x0RASP5-4402A31-4120000S1198766RASP5-4402A31-412R000S1198782RASP5-4402A31-4120100S1198770RASP5-4402A31-412R100S119878640x1RASP5-4402A31-4120010S1198774RASP5-4402A31-412R010S1198790RASP5-4402A31-4120110S1198778RASP5-4402A31-412R110S1198794400/480V AC40x0RASP5-4404A31-5120000S1198556RASP5-4404A31-512R000S1198562RASP5-4404A31-5120100S1198559RASP5-4404A31-512R100S119856540x0RASP5-4404A31-4120000S1198767RASP5-4404A31-412R000S1198783RASP5-4404A31-4120100S1198771RASP5-4404A31-412R100S119878740x1RASP5-4404A31-4120010S1198775RASP5-4404A31-412R010S1198791RASP5-4404A31-4120110S1198779RASP5-4404A31-412R110S1198795说明1) 额定电流在6 kHz操作频率,环境空气温度为+40 °C2) 参考常规内部或外部通风的4极三相异步电动机,50 Hz或60 Hz3)在 400V, 50 Hz;在 440 - 480V, 60 Hz4) 用于驱动带机械制动的马达5) 集成制动斩波器,具有制动电阻,可实现动态制动数据概览 7变频器 RASP57数据概览 8变频器 RASP5AS-Interface无内部制动电阻带内部制动电阻5)额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出AS-Interface配置文件STO无维修开关带维修开关无维修开关带维修开关lₑ[A] P[kW]P[HP](50/60Hz)传感器输入驱动器输出5)S-7.4–31个站点安全扭矩关闭产品编号订货号产品编号订货号产品编号订货号产品编号订货号5,62,2 3 - 4 0 x0 RASP5-5400A31-5120000S1198566 RASP5-5400A31-5120000S1198566RASP5-5400A31-5120100S1198569RASP5-5400A31-512R100S11985754 0 x0 RASP5-5400A31-4120000S1198800 RASP5-5400A31-4120000S1198800RASP5-5400A31-4120100S1198804RASP5-5400A31-412R100S11988204 0 x 1 RASP5-5400A31-4120010S1198808 RASP5-5400A31-4120010S1198808RASP5-5400A31-4120110S1198812RASP5-5400A31-412R110S1198828180/207V DC 40x0RASP5-5401A31-5120000S1198796 RASP5-5401A31-5120000S1198796RASP5-5401A31-5120100S1198797RASP5-5401A31-512R100S119879940x0RASP5-5401A31-4120000S1198801 RASP5-5401A31-4120000S1198801RASP5-5401A31-4120100S1198805RASP5-5401A31-412R100S119882140x1RASP5-5401A31-4120010S1198809 RASP5-5401A31-4120010S1198809RASP5-5401A31-4120110S1198813RASP5-5401A31-412R110S1198829230/277V AC40x0RASP5-5402A31-5120000S1198567 RASP5-5402A31-5120000S1198567RASP5-5402A31-5120100S1198570RASP5-5402A31-512R100S119857640x0RASP5-5402A31-4120000S1198802 RASP5-5402A31-4120000S1198802RASP5-5402A31-4120100S1198806RASP5-5402A31-412R100S119882240x1RASP5-5402A31-4120010S1198810 RASP5-5402A31-4120010S1198810RASP5-5402A31-4120110S1198814RASP5-5402A31-412R110S1198830400/480V AC40x0RASP5-5404A31-5120000S1198568 RASP5-5404A31-5120000S1198568RASP5-5404A31-5120100S1198571RASP5-5404A31-512R100S119857740x0RASP5-5404A31-4120000S1198803 RASP5-5404A31-4120000S1198803RASP5-5404A31-4120100S1198807RASP5-5404A31-412R100S119882340x1RASP5-5404A31-4120010S1198811 RASP5-5404A31-4120010S1198811RASP5-5404A31-4120110S1198815RASP5-5404A31-412R110S11988318,545- 40x0RASP5-8400A31-5120001S1198578 RASP5-8400A31-5120001S1198578RASP5-8400A31-5120101S1198581RASP5-8400A31-512R101S119858740x0RASP5-8400A31-4120001S1198836 RASP5-8400A31-4120001S1198836RASP5-8400A31-4120101S1198840RASP5-8400A31-412R101S119885640x1RASP5-8400A31-4120011S1198844 RASP5-8400A31-4120011S1198844RASP5-8400A31-4120111S1198848RASP5-8400A31-412R111S1198864180/207V DC40x0RASP5-8401A31-5120001S1198832 RASP5-8401A31-5120001S1198832RASP5-8401A31-5120101S1198833RASP5-8401A31-512R101S119883540x0RASP5-8401A31-4120001S1198837RASP5-8401A31-4120001S1198837RASP5-8401A31-4120101S1198841RASP5-8401A31-412R101S119885740x1RASP5-8401A31-4120011S1198845 RASP5-8401A31-4120011S1198845RASP5-8401A31-4120111S1198849RASP5-8401A31-412R111S1198865230/277V AC40x0RASP5-8402A31-5120001S1198579 RASP5-8402A31-5120001S1198579RASP5-8402A31-5120101S1198582RASP5-8402A31-512R101S119858840x0RASP5-8402A31-4120001S1198838 RASP5-8402A31-4120001S1198838RASP5-8402A31-4120101S1198842RASP5-8402A31-412R101S119885840x1RASP5-8402A31-4120011S1198846 RASP5-8402A31-4120011S1198846RASP5-8402A31-4120111S1198850RASP5-8402A31-412R111S1198866400/480V AC40x0RASP5-8404A31-5120001S1198580RASP5-8404A31-5120001S1198580RASP5-8404A31-5120101S1198583RASP5-8404A31-512R101S119858940x0RASP5-8404A31-4120001S1198839 RASP5-8404A31-4120001S1198839RASP5-8404A31-4120101S1198843RASP5-8404A31-412R101S119885940x1RASP5-8404A31-4120011S1198847 RASP5-8404A31-4120011S1198847RASP5-8404A31-4120111S1198851RASP5-8404A31-412R111S1198867说明1) 额定电流在6 kHz操作频率,环境空气温度为+40 °C2) 参考常规内部或外部通风的4极三相异步电动机,50 Hz或60 Hz3) 在 400V, 50 Hz;在 440 - 480V, 60 Hz4) 用于驱动带机械制动的马达5) 集成制动斩波器,具有制动电阻,可实现动态制动8Ethernet/IP无内部制动电阻带内部制动电阻5)额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出STO无维修开关带维修开关无维修开关带维修开关lₑ[A] P[kW]P[HP](50/60Hz)传感器输入驱动器输出5)安全扭矩关闭产品编号订货号产品编号订货号产品编号订货号产品编号订货号2,40,751- 420RASP5-2420EIP-412R000S1198868 RASP5-2420EIP-412R100S1 198872421RASP5-2420EIP-412R010S1198876 RASP5-2420EIP-412R110S1 198880180/207V DC420RASP5-2421EIP-412R000S1198869 RASP5-2421EIP-412R100S1 198873421RASP5-2421EIP-412R010S1198877 RASP5-2421EIP-412R110S1 198881230/277V AC420RASP5-2422EIP-412R000S1198870 RASP5-2422EIP-412R100S1 198874421RASP5-2422EIP-412R010S1198878 RASP5-2422EIP-412R110S1 198882400/480V AC420RASP5-2424EIP-412R000S1198871 RASP5-2424EIP-412R100S1 198875421RASP5-2424EIP-412R010S1198879RASP5-2424EIP-412R110S1 1988834,31,52-420RASP5-4420EIP-412R000S1198884 RASP5-4420EIP-412R100S1 198888421RASP5-4420EIP-412R010S1198892 RASP5-4420EIP-412R110S1 198896180/207V DC420RASP5-4421EIP-412R000S1198885RASP5-4421EIP-412R100S1 198889421RASP5-4421EIP-412R010S1198893 RASP5-4421EIP-412R110S1 198897230/277V AC420RASP5-4422EIP-412R000S1198886 RASP5-4422EIP-412R100S1 198890421RASP5-4422EIP-412R010S1198894 RASP5-4422EIP-412R110S1 198898400/480V AC420RASP5-4424EIP-412R000S1198887 RASP5-4424EIP-412R100S1 198891421RASP5-4424EIP-412R010S1198895RASP5-4424EIP-412R110S1 1988995,62,23-420RASP5-5420EIP-412R000S1198900RASP5-5420EIP-412R100S1 198904421RASP5-5420EIP-412R010S1198908 RASP5-5420EIP-412R110S1 198912180/207V DC420RASP5-5421EIP-412R000S1198901 RASP5-5421EIP-412R100S1 198905421RASP5-5421EIP-412R010S1198909 RASP5-5421EIP-412R110S1 198913230/277V AC420RASP5-5422EIP-412R000S1198902RASP5-5422EIP-412R100S1 198906421RASP5-5422EIP-412R010S1198910 RASP5-5422EIP-412R110S1 198914400/480V AC420RASP5-5424EIP-412R000S1198903RASP5-5424EIP-412R100S1 198907421RASP5-5424EIP-412R010S1198911 RASP5-5424EIP-412R110S1 1989158,545-420RASP5-8420EIP-412R001S1198916 RASP5-8420EIP-412R101S1 198920421RASP5-8420EIP-412R011S1198924RASP5-8420EIP-412R111S1 198928180/207V DC420RASP5-8421EIP-412R001S1198917RASP5-8421EIP-412R101S1 198921421RASP5-8421EIP-412R011S1198925RASP5-8421EIP-412R111S1 198929230/277V AC420RASP5-8422EIP-412R001S1198918 RASP5-8422EIP-412R101S1 198922421RASP5-8422EIP-412R011S1198926RASP5-8422EIP-412R111S1 198930数据概览 9调速器 RASP59无内部制动电阻带内部制动电阻5)额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出STO 无维修开关带维修开关无维修开关带维修开关l ₑ [A]P [kW] P [HP](50/60Hz) 传感器输入驱动器输出5)安全扭矩 关闭产品编号订货号产品编号订货号产品编号订货号产品编号订货号400/480V AC 420RASP5-8424EIP-412R001S1198919RASP5-8424EIP-412R101S1198923421RASP5-8424EIP-412R011S1198927RASP5-8424EIP-412R111S1198931说明1) 额定电流在6 kHz 操作频率,环境空气温度为+40 °C 2) 参考常规内部或外部通风的4极三相异步电动机,50 Hz 或60 Hz3) 在 400V, 50 Hz ; 在 440 - 480V, 60 Hz 4) 用于驱动带机械制动的马达5) 集成制动斩波器,具有制动电阻,可实现动态制动数据概览 10调速器 RASP5Profinet无内部制动电阻带内部制动电阻5)额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出STO 无维修开关带维修开关无维修开关带维修开关l ₑ [A] P [kW]P [HP](50/60Hz)传感器输入驱动器输出5)安全扭矩 关闭产品编号订货号产品编号订货号产品编号订货号产品编号订货号2,40,751-42RASP5-2420PNT-4120000S1198932RASP5-2420PNT-412R000S1198948RASP5-2420PNT-4120100S1198936RASP5-2420PNT-412R100S1198952421RASP5-2420PNT-4120010S1198940 RASP5-2420PNT-412R010S1198956RASP5-2420PNT-4120110S1198944RASP5-2420PNT-412R110S1198960180/207V DC 420RASP5-2421PNT-4120000S1198933 RASP5-2421PNT-412R000S1198949RASP5-2421PNT-4120100S1198937RASP5-2421PNT-412R100S1198953421RASP5-2421PNT-4120010S1198941 RASP5-2421PNT-412R010S1198957RASP5-2421PNT-4120110S1198945RASP5-2421PNT-412R110S1198961230/277V AC 420RASP5-2422PNT-4120000S1198934 RASP5-2422PNT-412R000S1198950RASP5-2422PNT-4120100S1198938RASP5-2422PNT-412R100S1198954421RASP5-2422PNT-4120010S1198942 RASP5-2422PNT-412R010S1198958RASP5-2422PNT-4120110S1198946RASP5-2422PNT-412R110S1198962400/480V AC 420RASP5-2424PNT-4120000S1198935 RASP5-2424PNT-412R000S1198951RASP5-2424PNT-4120100S1198939RASP5-2424PNT-412R100S1198955421RASP5-2424PNT-4120010S1198943 RASP5-2424PNT-412R010S1198959RASP5-2424PNT-4120110S1198947RASP5-2424PNT-412R110S11989634,31,52- 420RASP5-4420PNT-4120000S1198964 RASP5-4420PNT-412R000S1198980RASP5-4420PNT-4120100S1198968RASP5-4420PNT-412R100S1198984421RASP5-4420PNT-4120010S1198972 RASP5-4420PNT-412R010S1198988RASP5-4420PNT-4120110S1198976RASP5-4420PNT-412R110S1198992180/207V DC 420RASP5-4421PNT-4120000S1198965 RASP5-4421PNT-412R000S1198981RASP5-4421PNT-4120100S1198969RASP5-4421PNT-412R100S1198985421RASP5-4421PNT-4120010S1198973RASP5-4421PNT-412R010S1198989RASP5-4421PNT-4120110S1198977RASP5-4421PNT-412R110S1198993230/277V AC 420RASP5-4422PNT-4120000S1198966RASP5-4422PNT-412R000S1198982RASP5-4422PNT-4120100S1198970RASP5-4422PNT-412R100S1198986421RASP5-4422PNT-4120010S1198974 RASP5-4422PNT-412R010S1198990RASP5-4422PNT-4120110S1198978RASP5-4422PNT-412R110S1198994400/480V AC 420RASP5-4424PNT-4120000S1198967RASP5-4424PNT-412R000S1198983RASP5-4424PNT-4120100S1198971RASP5-4424PNT-412R100S1198987421RASP5-4424PNT-4120010S1198975 RASP5-4424PNT-412R010S1198991RASP5-4424PNT-4120110S1198979 RASP5-4424PNT-412R110S1198995说明1) 额定电流在6 kHz 操作频率,环境空气温度为+40 °C2) 参考常规内部或外部通风的4极三相异步电动机,50 Hz 或60 Hz 3) 在 400V, 50 Hz ; 在 440 - 480V, 60 Hz 4) 用于驱动带机械制动的马达5) 集成制动斩波器,具有制动电阻,可实现动态制动数据概览 9调速器 RASP510数据概览 11调速器 RASP5Ethernet/IP无内部制动电阻带内部制动电阻5)额定电流1)马达额定值2),3)外部制动控制电压4)输入/输出STO无维修开关带维修开关无维修开关带维修开关lₑ[A] P[kW]P[HP](50/60Hz)传感器输入驱动器输出5)安全扭矩关闭产品编号订货号产品编号订货号产品编号订货号产品编号订货号5,62,23- 420RASP5-5420PNT-4120000S1198996 RASP5-5420PNT-412R000S1199012RASP5-5420PNT-4120100S1199000RASP5-5420PNT-412R100S1199016421RASP5-5420PNT-4120010S1199004 RASP5-5420PNT-412R010S1199020RASP5-5420PNT-4120110S1199008RASP5-5420PNT-412R110S1199024180/207V DC420RASP5-5421PNT-4120000S1198997 RASP5-5421PNT-412R000S1199013RASP5-5421PNT-4120100S1199001RASP5-5421PNT-412R100S1199017421RASP5-5421PNT-4120010S1199005RASP5-5421PNT-412R010S1199021RASP5-5421PNT-4120110S1199009RASP5-5421PNT-412R110S1199025230/277V AC420RASP5-5422PNT-4120000S1198998 RASP5-5422PNT-412R000S1199014RASP5-5422PNT-4120100S1199002RASP5-5422PNT-412R100S1199018421RASP5-5422PNT-4120010S1199006 RASP5-5422PNT-412R010S1199022RASP5-5422PNT-4120110S1199010RASP5-5422PNT-412R110S1199026400/480V AC420RASP5-5424PNT-4120000S1198999 RASP5-5424PNT-412R000S1199015RASP5-5424PNT-4120100S1199003RASP5-5424PNT-412R100S1199019421RASP5-5424PNT-4120010S1199007 RASP5-5424PNT-412R010S1199023RASP5-5424PNT-4120110S1199011RASP5-5424PNT-412R110S11990278,545- 420RASP5-8420PNT-4120001S1199028RASP5-8420PNT-412R001S1199044RASP5-8420PNT-4120101S1199032RASP5-8420PNT-412R101S1199048421RASP5-8420PNT-4120011S1199036 RASP5-8420PNT-412R011S1199052RASP5-8420PNT-4120111S1199040RASP5-8420PNT-412R111S1199056180/207V DC420RASP5-8421PNT-4120001S1199029 RASP5-8421PNT-412R001S1199045RASP5-8421PNT-4120101S1199033RASP5-8421PNT-412R101S1199049421RASP5-8421PNT-4120011S1199037RASP5-8421PNT-412R011S1199053RASP5-8421PNT-4120111S1199041RASP5-8421PNT-412R111S1199057230/277V AC420RASP5-8422PNT-4120001S1199030 RASP5-8422PNT-412R001S1199046RASP5-8422PNT-4120101S1199034RASP5-8422PNT-412R101S1199050421RASP5-8422PNT-4120011S1199038 RASP5-8422PNT-412R011S1199054RASP5-8422PNT-4120111S1199042RASP5-8422PNT-412R111S1199058400/480V AC420RASP5-8424PNT-4120001S1199031 RASP5-8424PNT-412R001S1199047RASP5-8424PNT-4120101S1199035RASP5-8424PNT-412R101S1199051421RASP5-8424PNT-4120011S1199039 RASP5-8424PNT-412R011S1199055RASP5-8424PNT-4120111S1199043RASP5-8424PNT-412R111S1199059说明1) 额定电流在6 kHz操作频率,环境空气温度为+40 °C2) 参考常规内部或外部通风的4极三相异步电动机,50 Hz或60 Hz3) 在 400V, 50 Hz;在 440 - 480V, 60 Hz4) 用于驱动带机械制动的马达5) 集成制动斩波器,具有制动电阻,可实现动态制动11数据概览 12附件描述长度[m]用于产品编号订货号标准包装 说明通信操作单元,用于设定参数OLED 显示3RASP5, RAMO5DX-KEY-OLED 1691331个-前面 IP54,多语言选择带3m 连接电缆 (RJ45, 8-pin)编程电缆,用于连接到PC通过drivesConnect 软件来配置参数,带RJ45插头和USB 插头3RASP5, RAMO5DX-CBL-PC-3M0744-A3036-00P1个-参数存储单元和蓝牙通信棒通过蓝牙来存储,复制参数和/或传输参数至带有drivesConnect 软件的PC 上RASP5, RAMO5DX-COM-STICK3-KIT 1975861个-马达馈线马达电缆用于连接马达起动器至马达无卤, 8 x 1,5 mm 2, 塑料插头2RAMO5RAMO-CM1-2M01642821个-5RAMO5RAMO-CM1-5M01642831个-10RAMO5RAMO-CM1-10M 1642841个-无卤,屏蔽, 4 x 1,5 mm 2 + 2 x2RASP5RASP-CM2-2M01982801个-(2 x 0,75 mm 2), 塑料插头5RASP5RASP-CM2-5M0 1982811个-10RASP5RASP-CM2-10M 1982821个-AS-Interface 附件AS-Interface 连接M12 连接插座,用于AS-Interface 连接电缆IDC 端接RAMO5RASP5ZB2-100-AZ10826671个-AS-Interface 连接电缆,通过AS-Interface 连接头来连接装置带M12 插座和M12 插头,3极,1 RAMO5RASP5RA-XM12-1M 2720571个引脚1、3、4被指定Y 型连接头,最多连接2个传感器(每个M12插座)RASP5RA-XM12-Y 2904241个-备用钥匙用于自动-关闭/复位-手动钥匙开关锁定机构 MS1RAMO5RASP5M22-ES-MS12164161个-12描述长度[m]用于产品编号订货号标准包装说明电源供电扁平电缆RA-C1扁平电缆,用于400 V AC/24 V DC 或AS-Interface的分布式供电无卤, 7 x 4 mm2RA-C1RA-C1-7X4HF230860100延米不含漆膜污染物/硅电力连接电缆,通过400 V AC柔性母排连接头来连接装置配备电力插头和用于柔性母排连接头的插头,无卤, 5 x 1.5 mm21,5RAMO5RASP5RA-C1-PLFRA-C3/C1-1,5HF2902101个-配备HAN Q4/2 电力插头和用于柔性母排连接头的插头, 无卤, 5 x 1,5mm21,5RAMO5RASP5RA-C1-PLFRA-Q4/C1-1M51982831个-柔性母排连接头 400 V AC/24 V DC连接插座,用于电力连接电缆绝缘穿刺端子,带锁定机构的端子插座RA-C1-7X4HFRA-C3/C1-1,5HFRA-C1-PLF2901885个-防护盖,用于防护400 V AC/24 V DC柔性母排连接头RA-C1-PLF RA-C1-COV25469310个插头连接头,用于 400 V AC/24 V DC柔性母排连接头带防护罩的插头端子RA-C1-PLF RA-C1-VP-PLM2315745个单独订购电缆衬垫V-M25分配模块,用于通过圆形电缆,为400-V-AC/24-V-DC带状电缆馈电终端带穿孔螺钉,2 个VM25和2个V-M20 敲落孔,连接模块带弹簧负荷端子,连接高达4mm2的圆形电缆RA-C1-7X4HF RA-C1-AM-72902145个单独订购电缆衬垫V-M25或V-M20分配模块,用于通过圆形电缆,为带状电缆馈400V交流电带3个柔性母排输入和2个圆形电缆输入连接圆形电缆 4 mm2RA-C1-7X4HF RA-C1-VM-72642442个单独订购电缆衬垫V-M25/V-M20 和套管RA-C1-DF柔性母排套管,用于分配模块或控制柜内扁平电缆的套管-RA-C1-VM-7RA-C1-DF26424310个-柔性母排夹,用于固定带状电缆RA-C1-7X4HF RA-C1-FIX272086100 个 1 套带100 个线夹末端片,用于带状电缆末端RA-C1-7X4HF RA-C1-END129018910个-工具用于切割扁平电缆RA-C1-7X4HF RA-C1-CUT2546901个-电源供电圆形电缆 RA-C2电力连接电缆用于通过圆形电缆连接头来连接装置带电源插头及用于圆形电缆连接头的插头,无卤,5 x 1.5 mm21,5RAMO5RASP5RA-C2-S1-4RA-C3/C2-1,5HF2902111个带 HAN Q4/2电源插头及用于圆形电缆连接头的插头,无卤,5 x 1,5 mm21,5RAMO5RASP5RA-C2-S1-4RA-Q4/C2-1M51982841个-数据概览 13附件13描述长度[m]用于产品编号订货号标准包装说明圆形电缆连接头,用于连接插座,用于电力连接电缆用于 7 x 2.5/4 mm2, 400 V AC 和24 VDC, 通过绝缘穿刺技术端接,电缆通过金属螺丝固定,预先连接的插座,适用于电缆外径10 - 13 mmRA-C3/C2-1,5HF RA-C2-S1-42578301个配备的设备:一套适合这些电缆直径的垫圈,1 个锁定机构堵头用于封堵电源线路内最后一个圆形电缆连接头RA-C2-S1-4RA-C2-SBL26535710个一套带10个堵头数据概览 13附件电源供电圆形电缆RA-C4圆形电缆连接头连接插座,用于2.5 - 6 mm2的电源电缆经由弹簧笼式端子 T型连接头,1.5 至 6 mm2和/或0.5 至 4 mm2的插头连接,外壳防护等级 IP65RA-C4-PPB/C3-1M5RA-C4-X/C3-1M5RA-C4-PB651169051个标准包装里不包括外壳开口垫圈堵头,用于闭合未使用的壳体开口外壳密封圈,闭合,EPDM, 无硅无卤, IP65RA-C4-PB65RA-C4-D011696010个一套带•10个堵头垫圈,有槽的外壳套管密封圈用于 Ø 11 - 13 mm EPDM 圆形电缆,无硅无卤, IP65RA-C4-PB65RA-C4-D1311690710个-用于Ø 13 - 15 mm EPDM 圆形电缆,无硅无卤, IP65RA-C4-PB65RA-C4-D1511690810个-用于 Ø 15 - 17 mm EPDM圆形电缆,无硅无卤, IP65RA-C4-PB65RA-C4-D1711690910个-用于通过圆形电缆连接头来连接装置电缆 5 x 1.5 mm2, 无卤, 带RA-C4-PPB插头(用于圆形电缆连接头), 电源插头和垫圈 IP651,5RAMO5RASP5RA-C4-PB65RA-C4-PPB/C3-1M51169621个电力连接电缆,用于用户组装用于通过圆形电缆连接头来连接装置电缆5 x 1.5 mm2 无卤, 带线箍,电源插头和 IP65垫圈1,5RAMO5RASP5RA-C4-PB65RA-C4-X/C3-1M51169611个14。
Vegas 5 网络渲染说明
V egas 5 网络渲染使用说明(初稿)作者:快乐人(网名:xust)V egas 5 网络渲染有两种模式,分布式和非分布式。
分布式网络渲染可以将一个需要渲染的项目分成若干个片段,交给网络中的多台机器进行渲染;非分布式网络渲染可以将一个需要渲染的项目完全交给网络中的一台机器进行渲染。
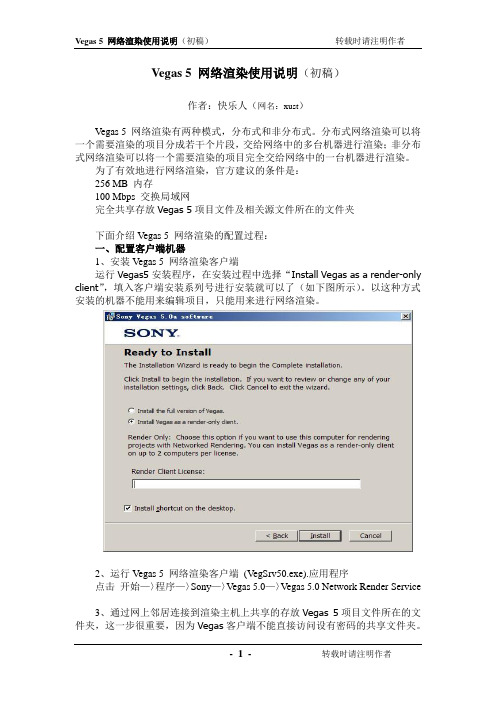
为了有效地进行网络渲染,官方建议的条件是:256 MB 内存100 Mbps 交换局域网完全共享存放Vegas 5项目文件及相关源文件所在的文件夹下面介绍V egas 5 网络渲染的配置过程:一、配置客户端机器1、安装V egas 5 网络渲染客户端运行Vegas5安装程序,在安装过程中选择“Install Vegas as a render-only client”,填入客户端安装系列号进行安装就可以了(如下图所示)。
以这种方式安装的机器不能用来编辑项目,只能用来进行网络渲染。
2、运行V egas 5 网络渲染客户端(VegSrv50.exe).应用程序点击开始—〉程序—〉Sony—〉Vegas 5.0—〉V egas 5.0 Network Render Service3、通过网上邻居连接到渲染主机上共享的存放Vegas 5项目文件所在的文件夹,这一步很重要,因为Vegas客户端不能直接访问设有密码的共享文件夹。
经过上述的几个步骤,网络渲染客户端就可以准备进行网络渲染了。
以下的操作都将在网络渲染主机上进行。
二、配置网络渲染主机网络渲染主机是指发起网络渲染的机器。
在主机上编辑好项目后,完全共享项目文件及相关源文件所在的文件夹后,进行以下操作:1、与网络渲染客户端机器建立网络连接点击开始—〉程序—〉Sony—〉V egas 5.0—〉Vegas 5.0 Network Render Service,选择“Renderers”tab,在“Host”栏下的空白表格中键入网络渲染客户端机器的IP地址或机器名,如:192.168.1.5,按回车,如果网络等正常,则“Status”栏显示“Ready”,表示与网络渲染客户端机器已经建立好了网络连接。
第5章 以太网与FlexRay

此外,在运行期间还会对同步化进行计算校正。这样可 以确保最小的时间差,从而在较长时间内不会导致传输错误。
图5-1 FlexRay上的两个授权唤醒控制单元(带有“S”标记的控制单元)
5.2.3 FlexRay在汽车上的应用 1.BMW车系中的FlexRay 在BMW车系F01/F02车型中,通过FlexRay总线系统以 跨系统方式实现汽车行驶动态管理系统和发动机管理系统的 联y
5.1 以太网
5.1.1 以太网及其标准 1. 以太网 以太网(Ethernet)最早由Xerox(施乐)公司创建, 1980年由DEC(美国数字设备公司)、Intel(英特尔公司) 和Xerox三家公司联合开发成为一个网络标准。以太网是一 项使用电缆连接的网络技术,可供任何制造商使用。
图5-14 终止节点终端内部的终端电阻
图5-15 形成环路的FlexRay终端电阻的设置
5.2.4 FlexRay的故障处理与检测 1.故障处理 FlexRay总线导线出现故障或FlexRay控制单元自身出 现故障时,可能会切断各控制单元或整个支路与总线之间的 通信。带有四个授权唤醒FlexRay控制单元(ZGM、DME、 DSC、ICM)的分支除外。如果这些控制单元之间的通信中 断,则发动机无法起动。 此外,控制单元内的这种总线监控功能还能防止在非授 权时间发送信息,从而防止覆盖其它信息。
6.同步化 为了能够在联网控制单元内同步执行各项功能,需要有 一个共同的时基。由于在所有控制单元内部都是利用其自身 的时钟脉冲发生器工作的,因此,必须通过总线进行时间匹 配。 控制单元测量某些同步位的持续时间,据此计算平均值 并根据这个数值调整总线时钟脉冲。同步位在总线信息的静 态部分中发送。 系统启动后,只要CAS控制单元发送一个唤醒脉冲, FlexRay上的两个授权唤醒控制单元(图5-1中带有“S”标记 的控制单元)之间就会开始进行同步化。该过程结束时,其 余控制单元相继自动在FlexRay上注册,计算出各自的差值 并进行校正。
计算机网络5章习题及参考答案(20080720)
第5章网络层1.给出两个适合于使用面向连接服务的示例应用,再给出两个最好使用无连接服务的例子。
答案:文件传送、远程登录和视频点播需要面向连接的服务,在另一方面,信用卡验证和其他的销售点终端、电子资金转移,以及许多形式的远程数据库访问最好使用无连接服务。
2.有没有虚电路服务需要以非顺序的方式投递分组的情况?请解释。
答案:有。
例如中断信号就应该跳过在它前面的数据,进行不遵从顺序的投递。
典型的例子是当一个终端用户键入退出(或kill)键时,由退出信号产生的分组应该立即发送,并且应该跳过当前队列中排在前面等待程序处理的任何数据(即已经键入但尚未被程序读取的数据)。
3.数据报网络把每个分组都作为独立的单元进行路由选择,虚电路网络则不必这样做,每个数据分组都遵循一个事先确定好的路由。
这个事实是否意味着虚电路网络不需要从任意源到任意目的地为分组进行路由选择的能力?答案:不对。
虚电路网络需要从任意源到任意目的地为连接建立分组选择路由的能力。
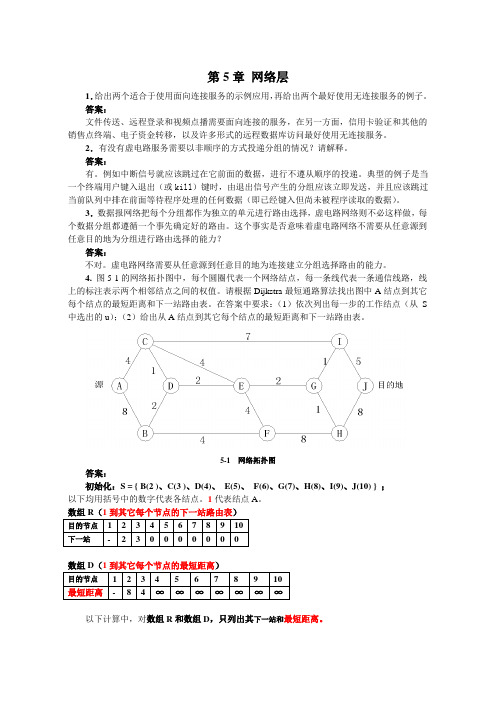
4. 图5-1的网络拓扑图中,每个圆圈代表一个网络结点,每一条线代表一条通信线路,线上的标注表示两个相邻结点之间的权值。
请根据Dijkstra最短通路算法找出图中A结点到其它每个结点的最短距离和下一站路由表。
在答案中要求:(1)依次列出每一步的工作结点(从S 中选出的u);(2)给出从A结点到其它每个结点的最短距离和下一站路由表。
5-1 网络拓扑图答案:初始化:S = { B(2 )、C(3 )、D(4)、E(5)、F(6)、G(7)、H(8)、I(9)、J(10) } ;以下均用括号中的数字代表各结点。
1代表结点A。
目的节点 1 2 3 4 5 6 7 8 9 10下一站- 2 3 0 0 0 0 0 0 0目的节点 1 2 3 4 5 6 7 8 9 10最短距离- 8 4 ∞∞∞∞∞∞∞以下计算中,对数组R和数组D,只列出其下一站和最短距离。
While u 删去u的S (u,v) C=D(u) C<D(v)的v R 数组 D 数组巡环次+weight (u,v)5.给出连接建立时可能要协商的协议参数的3个例子。
第五代移动通信技术
第五代移动通信技术第五代移动电话行动通信标准,也称第五代移动通信技术,外语缩写:5G。
也是4G之后的延伸,正在研究中,网速可达5M/S - 6M/S .诺基亚与加拿大运营商Bell Canada合作,完成加拿大首次5G网络技术的测试。
测试中使用了73GHz范围内频谱,数据传输速率为加拿大现有4G网络的6倍。
鉴于两者的合作,外界分析加拿大很有可能将在5年内启动5G网络的全面部署。
由于物联网尤其是互联网汽车等产业的快速发展,其对网络速度有着更高的要求,这无疑成为推动5G网络发展的重要因素。
因此无论是加拿大政府还是全球各地,均在大力推进5G网络,以迎接下一波科技浪潮。
不过,从目前情况来看5G网络离商用预计还需4到5年时间。
未来 5G 网络正朝着网络多元化、宽带化、综合化、智能化的方向发展。
随着各种智能终端的普及,面向 2020 年及以后,移动数据流量将呈现爆炸式增长。
在未来 5G 网络中,减小小区半径,增加低功率节点数量,是保证未来 5G 网络支持 1 000 倍流量增长的核心技术之一。
因此,超密集异构网络成为未来 5G 网络提高数据流量的关键技术[8]。
未来无线网络将部署超过现有站点 10 倍以上的各种无线节点,在宏站覆盖区内,站点间距离将保持 10 m 以内,并且支持在每 1 km2 范围内为 25 000个用户提供服务。
同时也可能出现活跃用户数和站点数的比例达到 1∶ 1的现象,即用户与服务节点一一对应。
密集部署的网络拉近了终端与节点间的距离,使得网络的功率和频谱效率大幅度提高,同时也扩大了网络覆盖范围,扩展了系统容量,并且增强了业务在不同接入技术和各覆盖层次间的灵活性。
虽然超密集异构网络架构在 5G 中有很大的发展前景,但是节点间距离的减少,越发密集的网络部署将使得网络拓扑更加复杂,从而容易出现与现有移动通信系统不兼容的问题。
在 5G 移动通信网络中,干扰是一个必须解决的问题。
网络中的干扰主要有:同频干扰,共享频谱资源干扰,不同覆盖层次间的干扰等。
分布式光纤传感网络的设计和实现

分布式光纤传感网络的设计和实现一、背景介绍光纤传感网络,在许多区域,如地震监测、石油勘探、可靠通信等方面都有广泛应用。
尽管它是一种开发成熟的技术,但传统的光纤传感网络仍然存在一些限制。
为了克服这些限制,分布式光纤传感网络被研究出来。
本文将介绍分布式光纤传感网络的设计和实现。
二、分布式光纤传感网络的概述分布式光纤传感网络是将传统的光纤传感网络划分为多个组件。
每个组件由一个或多个传感器和一个连接器组成。
这个连接器是光纤连接器,这些连接器之间会将信号传输至控制器,这样每个组件将会形成一个单独的物理子系统,所有的子系统都可以通过一个通用的接口进行访问,这样分布式光纤传感网络就形成了。
三、分布式光纤传感网络的设计分布式光纤传感网络的设计需要考虑这些因素:是要采用何种方案来满足所需要的时延和数据吞吐量?选择何种传感器、光纤及接头?如何对每个节点进行定位?如何利用图形化界面和其他方便的人机接口来收集、显示、筛选、存储相关信息?设计者还应该决定选择什么类型的控制器来实现单个组件、物理子系统和整个分布式光纤传感网络之间的通信?四、分布式光纤传感网络的实现1. 硬件实现硬件实现的主要成分是由传感器和光纤组成。
分布式光纤传感网络的传感器的种类会随着应用领域的不同而有所不同,常用的有位移传感器、温度传感器、压力传感器等。
由于这种实现方式需要对光纤的稳定性和光学性能有很高的要求,因此光纤的选择也尤为重要。
2. 软件实现软件实现负责完成数据的采集、传输、配置、协议处理等任务。
在采集数据时,传感器会从环境中收集信息,将其转换为数字信号,并通过光纤发送到控制器。
在发送到控制器之前,这些数字信号还需要进行数据处理,如数据滤波、校正、归一化等操作。
软件实现还会定义一些固定的协议来规范数据传输。
这些协议规定了控制器如何处理数据并将其交给上层应用程序。
3. 系统实现系统实现将硬件和软件实现整合在一起,直到形成一个可运行的分布式光纤传感网络。
《计算机组装与维修》(第二版)课后习题参考答案
第1章计算机系统组成1.填空题(1)硬件系统软件系统(2)主机外设(3)运算器存储器控制器输入设备输出设备(4)操作系统(5)并发性共享性异步性虚拟性(6)随机存储器只读存储器高速缓存(7)通用寄存器状态寄存器2.思考与简答(1)冯诺依曼计算机的结构特点是:①计算机应包括运算器、存储器、控制器、输入设备和输出设备5大基本部件。
②计算机内部采用二进制来表示指令和数据。
③将编写完成的程序和数据送入内存,然后计算机自动地逐条取出指令和数据,并进行分析、处理和执行。
(2)微处理器:指计算机内部对数据进行处理并对处理过程进行控制的部件,伴随着大规模集成电路技术的迅速发展,芯片集成密度越来越高,CPU可以集成在一个半导体芯片上,这种具有中央处理器功能的大规模集成电路器件,被统称为“微处理器”。
微型计算机:简称“微机”。
由大规模集成电路组成的、体积较小的电子计算机。
由微处理机(核心)、存储片、输入和输出片、系统总线等组成。
特点是体积小、灵活性大、价格便宜、使用方便。
微型计算机系统:简称“微机系统”。
由微型计算机、显示器、输入输出设备、电源及控制面板等组成的计算机系统。
配有操作系统、高级语言和多种工具性软件等。
(3)微型计算机发展的阶段第一代电子计算机是电子管计算机,时间大约为1946年第一台计算机研制成功到20世纪50年代后期。
第二代电子计算机是晶体管计算机,时间大约从20世纪50年代中期到20世纪60年代后期。
第三代电子计算机是集成电路计算机,时间大约从20世纪60年代中期到20世纪70年代前期。
第四代电子计算机是大规模集成电路计算机,时间从20世纪70年代初至今。
从1982年以来,日本及一些西方国家提出了研制第五代计算机的设想。
(4)操作系统的功能①处理器管理:实现处理器的分配和回收等问题。
②存储器管理:操作系统对内存的管理。
③设备管理:主要任务是管理计算机系统中所有的外围设备。
④文件管理:主要任务是对用户文件和系统文件进行有效管理,实现文件的共享、保护和保密,保证文件的安全性。
5GC服务化架构介绍

5G核心网进行了颠覆性设计,通过基于服务的架构、切片、CU分离等,结合云化技术,实现网 络的定制化、开放化、服务化,支持大流量,大连接和低时延的万物互联需求
SBA:基于服务的5G网络架构 网络切片:面向行业用户的虚拟移动专网 边缘计算:分布式用户面,灵活部署
NG-CP
基于服务化的5G网络功能架构
NEF Nnef
- NRF (NF Repository Function)网络功能仓库 - NEF (Network Exposure Function)能力开放功能 - UDR (Unified Data Repository)统一数据仓储 - NSSF (Network Slice Selection Function)网络切片选择 - AUSF ( Authentication Server Function)认证服务器功能
5G SBA架构的持续演进
R15的服务化架构SBA,向着cloud native架构演进已经迈出关键性第一步,但 仍需产业界一起努力,持续演进,保持和发扬5G SBA的先进性!
1. 优化系统建模方式,提升灵活性
① 如何设计更优的服务粒度(与R15特性和功能所定义的NF 服务相比) ② 优化服务建模方式,实现服务可以独立部署,不依赖于特定的一个NF ③ 提升服务可组合能力,所定义的服务支持新的特性 2. 扩展“服务”的概念,从控制面到用户面
• ……
12
THANKS!
13
Cloud Native是一个思想集合:包含技术(微服务,敏捷基础设施)和管理(DevOps,持续交付,康威定 律等)两方面,是当前软件发展成果的集大成者,可很好的满足5G网络诉求
Cloud native并不是把传统的网络功能软件简单移植到虚拟化平台上,其架构、业务逻辑、系统组织和管理 方式将发生深刻的革命性变化
分布式课后习题答案

第一章分布式数据库系统概述请用自己的语言定义下列分布式数据库系统中的术语:(1)全局/局部数据:(详见课本第9页所谓的局部数据是指……;所谓的全局数据是指……)(2)全局/局部用户(应用):(3)全局/局部DBMS:(4)全局/局部DB:(5)全局外模式:(详见课本第13页)由全局用户视图组成,是全局概念模式的子集。
(6)全局概念模式:(详见课本第13页)定义分布式数据库系统中所有数据的整体逻辑结构,是全局应用的公共数据视图。
(7)分片模式:(详见课本第13页)是全局数据整体逻辑结构分割后的局部逻辑结构,是DDBS 的全局数据的逻辑划分视图.(8)分配模式:(详见课本第13页)用于根据选定的数据总体分配方案,定义各片段的物理存放地点.(9)局部概念模式:(详见课本第13-14页)是全局概念模式被分片和分配到局部场地上的映像的逻辑结构及特征的描述,是全局概念模式的子集。
其逻辑结构与局部DBMS所支持的数据模型有关,当全局数据模型与局部数据模型不同时,局部概念模式还应包括数据模型转换的描述。
(10)局部内模式:描述局部概念模式涉及的数据在局部DBMS中的物理结构及物理存储细节,完全与非分布式系统相同。
1.2采用分布式数据库系统的主要原因是什么?(P1)1.3分布式数据库系统可分为哪些类?(课件第1章。
课本P6,7,8)1.4什么是分布式数据库系统?它具有哪些主要特点?怎么样区别分布式数据库系统与只提供远程数据访问功能的网络数据库系统?(分布式数据库系统的定义、特点详见课件第1.课本P6)1.5分布式DBMS具有哪些集中式DBMS不具备的功能?(课件第1章。
课本P15)用自己的语言解析“什么时候需要进行数据分片和数据复制”?(课本第10,11页)式数据库系统中,为什么要对数据进行分片?什么是关系的片段?关系的片段有哪些主要类型?(课本第9-10页。
数据分片是指数据存放单位不是全部关系,而是关系的一个片段。
第4章 网络层5——路由选择协议

“链路状态”说明本路由器都和哪些路由器相邻,以及该链路的 “度量”(metric) 。 度量包括费用、距离、时延、带宽等
当链路状态发生变化时,路由器才用洪泛法向所有路由器 发送此信息。
链路状态数据库(link-state database)
各路由器之间频繁地交换链路状态信息,所有路 由器最终都能建立一个链路状态数据库。
每一个区域都有一个32位的区域标识符(用点分 十进制表示)。
区域不能太大,在一个区域内的路由器最好不超 过 200 个。
OSPF 划分为两种区域:主干区域和非主干区 域。主干区域(backbone area),标识符规定为 0.0.0.0,用于连通非主干区域。
至其他自治系统 自治系统 AS
R1 网1 R2 网2 R3 R5
Traceroute(tracert):跟踪分组从源点到 终点的路径
通过发送小的数据包到目的设备直到其返回, 来测量其需要多长时间。 输出结果包括测试的时间(ms)和设备IP地址。
PING 的应用举例
Traceroute 的应用举例
4.5 因特网的路由选择协议
静态路由选择策略 — 即非自适应路由选择 ,特点是简单和开销较小,但不能及时适应 网络状态的变化。 动态路由选择策略 — 即自适应路由选择, 特点是能较好适应网络状态的变化,但实现 起来较为复杂,开销比较大。
1. 工作原理
RIP 是一种分布式的基于距离向量的路由选 择协议。
RIP 协议要求网络中的每一个路由器都要维 护从它自己到其他目的网络的距离记录。
“距离”的定义
RIP认为一个好的路由是通过的路由器数目少, 即“距离短”。
5G移动通信技术 第五章 5G核心网和接口协议

5.1.3 5G核心网的网络功能
3.SMF的主要功能 (1) 会话管理,例如会话建立、修改和释放,包括UPF和AN节点之间的通道维护; (2) UE IP地址分配和管理; (3) DHCPv4功能和DHCPv6功能:SMF通过提供与请求发送的IP地址相对应的MAC地址来响应ARP或IPv6邻 居请求; (4) 选择和控制UP功能,包括控制UPF代理ARP和IPv6邻居发现,或将所有ARP或IPv6邻居请求流量转发到 SMF; (5) 配置UPF的流量控制,将流量路由到正确的目的地; (6) 根据策略控制功能终止接口; (7) 合法拦截; (8) 收费数据收集和支持计费接口; (9) 控制和协调UPF的收费数据收集; (10) 终止SM消息的SM部分; (11) 下行数据通知; (12) 发起针对AN的特定SM信息,通过AMF N2发送到AN; (13) 确定会话的SSC(Session and Service Continuity Mode,会话和服务连续模式); (14) 漫游功能。第五章
5G核心网和接口协议
5G核心网网络功能和架构 5G核心网用户面和控制面协议栈 5G其他功能架构 SDN NFV SDN/NFV和5G网络
05 5G核心网和接口协议 1.5G核心网网络功能和架构 核桃AI
5.1.1 5G核心网的原则
5G系统架构被定义为支持数据连接和服务,能够使用比如NFV(Network Functions Virtualization,网络 功能虚拟化)技术和SDN(Software Defined Network,软件定义网络)架构这样的信息技术,5G系统架构可 以确保各控制平面网络功能之间实现基于服务的无阻碍流畅交互。
5G核心网的十大关键原则如下: (1) 将UP功能与CP功能分开,允许独立扩展、演进和灵活部署,例如集中式扩展或分布式(远程)扩展; (2) 模块化功能设计,例如:实现灵活和有效的网络切片; (3) 支持统一的身份验证框架; (4) 在适用的情况下,将流程定义为服务,以便可以重复使用; (5) 支持网络能力对外开放,例如:开放接口,非3GPP网络也可以接入; (6) 如果需要,允许每个NF(Network Function,网络功能)直接与其它NF交互。该体系结构不排除使用 中间节点功能来帮助路由控制平面消息,例如像DRA(Diameter Routing Agent,路由代理节点); (7) 支持“无状态”NF,其中“计算”资源与“存储”资源分离; (8) 最小化AN(接入网络)和CN(核心网络)之间的依赖关系,这种依赖关系由核心网络和共同的AN-CN 接口定义,该接口集成了不同的接入类型;
计算机网络第5版习题详解
第1章1-01 计算机网络向用户可以提供那些服务?答:连通性和共享数据传输:网络间个计算机之间互相进行信息的传递。
资源共享:进入网络的用户可以对网络中的数据、软件和硬件实现共享。
分布处理功能:通过网络可以把一件较大工作分配给网络上多台计算机去完成1-02 简述分组交换的要点。
答:采用存储转发的分组交换技术,实质上是在计算机网络的通信过程中动态分配传输线路或信道带宽的一种策略。
它的工作机理是:首先将待发的数据报文划分成若干个大小有限的短数据块,在每个数据块前面加上一些控制信息(即首部),包括诸如数据收发的目的地址、源地址,数据块的序号等,形成一个个分组,然后各分组在交换网内采用“存储转发”机制将数据从源端发送到目的端。
由于节点交换机暂时存储的是一个个短的分组,而不是整个的长报文,且每一分组都暂存在交换机的内存中并可进行相应的处理,这就使得分组的转发速度非常快。
分组交换网是由若干节点交换机和连接这些交换机的链路组成,每一结点就是一个小型计算机。
基于分组交换的数据通信是实现计算机与计算机之间或计算机与人之间的通信,其通信过程需要定义严格的协议;分组交换网的主要优点:1、高效。
在分组传输的过程中动态分配传输带宽。
2、灵活。
每个结点均有智能,可根据情况决定路由和对数据做必要的处理。
3、迅速。
以分组作为传送单位,在每个结点存储转发,网络使用高速链路。
4、可靠。
完善的网络协议;分布式多路由的通信子网。
电路交换相比,分组交换的不足之处是:①每一分组在经过每一交换节点时都会产生一定的传输延时,考虑到节点处理分组的能力和分组排队等候处理的时间,以及每一分组经过的路由可能不等同,使得每一分组的传输延时长短不一。
因此,它不适用于一些实时、连续的应用场合,如电话话音、视频图像等数据的传输;②由于每一分组都额外附加一个头信息,从而降低了携带用户数据的通信容量;③分组交换网中的每一节点需要更多地参与对信息转换的处理,如在发送端需要将长报文划分为若干段分组,在接收端必须按序将每个分组组装起来,恢复出原报文数据等,从而降低了数据传输的效率。
5GC核心网基本概念

Naf Nnrf
NRF
HPLMN
5G 时代
目录
5G核心网行业趋势 ZTE 5G核心网总体架构 ZTE 5G 核心网特色解决方案 ZTE 5G运营商合作与试验案例
ZTE 5GC 基于服务的架构
NF Service
网元
网络功能
•NE改为NF,NF可分为NF服务(VNFC) •服务是自包含的,可重复使用的,可独立扩展的 •按需编排和分布式部署
超高宽带
10G+bps 峰值速率/用户
eMBB
动态的体验管理
5G
业务定义的连接 按需的移动性
mMTC
低功耗 大连接通信
100万连接/km2
uRLLC
高可靠 低时延通信
1ms时延
快速的流量转发
5G时代的网络必须按需满足业务的多样性和相应性能需求。
eMBB/URLLC/mMTC全新数字体验
eMBB: 无缝广域覆盖
什么是无状态
Stateful vs Stateless
------Definition in ETSI
无状态设计
3 level of stateless
Transaction lifecycle level
起始于NF收到请求,结束于NF返回响应;
Procedure lifecycle level
OpenStack, 等.)
云原生架构
• 服务化架构 • 控制面和用户面分离 • 无状态设计
按需的业务
• 灵活的网络切片 • 跨DC的灵活部署
端到端的编排
• SDN/NFV实现跨域资源和网络业 务的统一编排和管理
• 层次化的编排架构,结构清晰, 便于系统维护。
WIFI无线路由器的五种工作模式
WIFI无线路由器的五种工作模式(转) WIFI无线路由器已经非常普及其应用相当广泛,特别是现在家庭上网应用更是必不可少。
现在而今眼目下哪家只有一台电脑,哪家又会为此去申请两条宽带?在这里给大家介绍五种WIFI无线路由器常用的工作方式,供各位在使用无线路由器时参考。
WIFI.1. 热点模式(Access Point)。
这种模式是WIFI无线路由早期的典型工作模式。
这种模式下WIFI无线路由的配置比较简单,只需配置无线SSID和安全策略即可。
此时本机不具备路由功能,纯粹只相当于一个带无线接入功能的交换机。
它能实现有线和无线多个设备的局域网接入。
为了避免和前端网络设备的DHCP冲突,通常会关闭本机的DHCP功能。
用户设备的IP地址和DNS地址需要手动配置或通过前端的DHCP自动分配。
这种模式下的有线接口为LAN口。
此模式适用于:商务、酒店、学校等环境的无线接入。
具体配置如下:2. 无线路由模式(Router)。
这种模式是WIFI无线路由在家庭的典型工作模式。
这种模式下机器除具有接入交换机功能外还具备路由功能。
此时有线口中应该有一个为WAN口,用于和ADSL Modem或小区有线宽带相接。
本机能使用PPPoE协议自动登录进入ISP提供的Internet接入。
多个用户设备可通过无线接入本机网络后共享Internet连接。
这种模式下需要配置无线SSID、无线安全策略、WAN口连接方式。
通常本机的DHCP功能需要开启,所有接入用户设备的IP地址和DNS地址等通过本机的DHCP 自动分配。
这种模式适用于:家庭、公寓等环境的Internet共享。
的图:AP需要配置的界面如下,其中的安全策略配置同无线路由模式下可以实现IP带宽控制,动态DNS等实用功能。
(Repeater)中继模式3.这种模式用于扩展热点AP接入或无线路由接入模式的无线信号覆盖范围。
这种模式需要设备支持WDS(Wireless Distribution System即无线分布式系统)。
WIFI无线路由器的五种工作模式
WIFI无线路由器的五种工作模式
1. 站点模式:路由器作为一个无线AP,连接到现有网络并提
供无线网络服务给终端设备。
2. 中继模式:路由器接收到其他无线路由器的信号,并将信号转发给其他终端设备,扩大无线网络的覆盖范围。
3. 客户端模式:路由器作为一个无线客户端,连接到现有无线网络,并提供有线网络服务给其他终端设备。
4. 桥接模式:路由器用来连接两个局域网,通过无线桥接的方式使得两个网络可以互相访问。
5. WDS模式:路由器可以通过WDS(无线分布式系统)功能,实现多个无线路由器之间的互联互通,扩大无线网络的覆盖范围。
分布式存储系统的网络设计
分布式存储系统的网络设计随着互联网时代的到来,数据量的急剧增加,人们对数据存储和传输的要求也愈发提高。
传统的集中式存储系统已经无法满足人们对数据存储和传输的需求,分布式存储系统应运而生。
分布式存储系统能够将数据分散存储在不同的物理位置,实现高可用性和可扩展性,大大提高了数据的存储和传输效率。
网络作为分布式存储系统的基础设施之一,网络设计的合理性直接影响着分布式存储系统的性能和可靠性。
本文将从网络设计的角度出发,探讨分布式存储系统的网络设计。
一、背景知识在进入分布式存储系统的网络设计前,我们需要了解一些相关的背景知识。
1. 分布式存储系统分布式存储系统是将数据分散存储在不同的物理位置,并按照一定的规则进行数据管理和调度的系统。
分布式存储系统具有自我修复、高可用性、高可扩展性等优点。
2. 网络拓扑结构网络拓扑结构是网络中各节点之间关系的总体称呼。
常见的网络拓扑结构包括星型结构、总线结构、环形结构、树型结构、网状结构等。
3. 网络性能指标网络性能指标是衡量网络质量和性能的指标,包括带宽、时延、丢包率、吞吐量等。
这些指标对于分布式存储系统的性能和可靠性有着至关重要的影响。
二、分布式存储系统的网络设计包括物理拓扑结构、网络协议、网络传输协议等多个方面。
在进行分布式存储系统的网络设计前,我们需要考虑以下几点。
1. 数据访问的方式。
分布式存储系统需要支持不同的数据访问方式,如顺序访问、随机访问和范围访问等。
这些访问方式对网络传输和数据存储的要求是不同的。
2. 数据传输的速率。
分布式存储系统需要传输大量的数据,因此网络带宽是考虑网络设计的一个重要因素。
需要合理分配网络带宽,以保证数据传输的速率和效率。
3. 数据可靠性和安全性。
数据可靠性和安全性是分布式存储系统的重要特性。
网络设计需要考虑如何保证数据的可靠性和安全性,避免数据丢失和泄露的风险。
基于以上要点,下面我们将从物理拓扑结构、网络协议和网络传输协议三方面,介绍分布式存储系统的网络设计思路。
Net分布式系统之五:C#使用Redis集群缓存

序号服务IP说明1192.168.1.110Redis节点A端⼝:7000(M),7003(S)Redis节点B端⼝:7001(M),7004(S)Redis节点C端⼝:7002(M),7005(S)Net分布式系统之五:C#使⽤Redis集群缓存本⽂介绍系统缓存组件,采⽤NOSQL之Redis作为系统缓存层。
⼀、背景 系统考虑到⾼并发的使⽤场景。
对于并发提交场景,通过上⼀章节介绍的RabbitMQ组件解决。
对于系统⾼并发查询,为了提供性能减少数据库压⼒,我们加⼊缓存机制,可以不同层次加⼊缓存⽀持,本⽂主要介绍应⽤服务层和数据层之间加⼊缓存机制提升性能。
业界缓存组件有Redis、Memcached、MemoryCache。
本系统采⽤Redis缓存组件,有些系统将Redis当作MQ使⽤,此场景本系统⽤RabbitMQ,Redis主要⽤于系统缓存应⽤。
⼆、Redis简介 Redis是⼀个开源的Key-Value数据库,使⽤C语⾔编写、⽀持⽹络、可基于内存亦可持久化的NOSQL数据库,并提供多种语⾔的API,例如:Java,C/C++,C#,PHP,JavaScript,Perl,Object-C,Python,Ruby等语⾔驱动。
⾃Redis3.0开始⽀持集群⽅案。
相关Redis Cluster 原理在此不多介绍,⽹络上有很多资料。
三、Redis集群应⽤ (⼀)环境介绍 本系统基于Linux之CentOS搭建Redis3.0集群。
将三个Instance部署于⼀台虚拟机,应⽤部署于windows平台。
(⼆)安装Redis 1、安装相关依赖⼯具1[root@andoncentos 桌⾯]# yum -y install gcc openssl-devel libyaml-devel libffi-devel readline-devel zlib-devel gdbm-devel ncurses-devel gcc-c++ automake autoconf 2、安装Redis 3.0.61[root@andoncentos 桌⾯]# cd /usr/loacal1[root@andoncentos loacal]# wget http://download.redis.io/releases/redis-3.0.6.tar.gz1[root@andoncentos 桌⾯]# tar xvf redis-3.0.6.tar.gz1[root@andoncentos 桌⾯]# cd redis-3.0.6/1[root@andoncentos 桌⾯]# make MALLOC=libc1[root@andoncentos redis-3.0.6]# make install 3、由于我们使⽤不同端⼝号区分,在两个服务各⾃建⽴以端⼝命名的⽂件夹。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Connect Confirm
Connect Request
t3
t1
Service Provider
t2
t4
4
双边层层之间协商(Bilateral Layer-to-Layer Negotiation)
发生的情形: (1) 本地的业务用户和业务提供者,如应用要求OS业务之间的保证。 (2) 主机和网络之间,如host-sender想发送广播多媒体流。
6
混合协调 (Hybrid Negotiation)
在广播和点到多点通信(broadcast/Multicast )的情况下,每一个参会的主 机接收用户与主机-发送用户的功能可能不同,但是大家都要参加(会议系 统),那怎么办呢?需要混合协商!
bilatoral Layer-to-layer negotiation
13
QoS Translation
1) 为什么要进行QoS Translation? (1) 以前介绍QoS Layering时,曾讲到采用分层化方法来描述QoS的具 体要求,一个端到另一端多媒体通信系统的宏观QoS描述在不同层上 有不同的体现。表现为QoS参数牲不同,所以要进行逐层(Layer-toLayer)的QoS翻译。譬如讲在网络层规定的组平均分组丢失率与多媒 体终端设备的视频采集设备无直接联系,同样帧质量对链路层业务提 供者来说无法直接定义,该参数只对初始化帧缓冲区(Frame Buffer)有 意义。 (2) 对复杂的MCS系统,将来可能划分成更多层,也可能每一层进一步细 分为许多子层,因此要逐层落实来自用户应用要求的QoS,需要建立有 效灵活的QoS层翻译机制。 (3) translation 是在多媒体呼叫建立阶段层-层通信的附加业务。
代理(Agent):把某一部分功能抽象独立化模块化单独 Running 提高效率 如,MCS中的组通信代理(Group Communication Agent) 经纪人(Broker):是一个更专业的 在MCS中存在QoS控制问题, QoS Broker
12
Negotiation in QoS Broker
包括两个方面 可能的通信
Service User
Service Provider
5
单边协商(Unilateral negotiation)
这种形式的协商不允许业务提供者或被叫服务用户改变由主叫服务用 户所提出的QoS。被叫用户只能适应这种QoS提供。 如:TV广播用户:TV Broad casting-彩色TV 黑白TV 这对质量控制是在接收器设备上完成的。
- GUI接口通常表现为,帧相系数,帧率(?帧/秒),帧大小(Frame Size)以及 进延和时延抖动要求等。
网络
Uniateral Negotiation host-Receiver
Host-Sender
混合协商
7
三角协商(Triangular Negotiation for Information Exchange)
达成相同的QoS 达成相同的QoS
caller 主叫
请示原语
业务提供者 (Service Provider)
Caller 被叫
QoS平均值 QoS 平均值
Confirm原语 Confirm 原语
indication 原语 response 原语
改变 QoS值 QoS 值
Caller
Peer-to-Peer Negotiation Requested QoS Value
Callee
Changed QoS Value Connect Indication Connect Response
Negotiation in QoS broker
[NS95a] K.Nahratedi and J.M.Smith. The QoS Broker. IEEE Multirnedia, 2(1):53-67, Spring 1995. [NS95c] K. Nahrstedt and R. Steinmetz. Resource Management in Networked Multimedia Systems. IEEE Computer, pages 52-64, May 1995.
Further Reference [WH.94]L.Wolf and R.G.Herrtwich.The system Architecture of the Heideberg Transport system.ACM Operating Systems Review,28(2),April 1994.
1
(1) QoS 协商
QoS协商操作仍需参照MCS中分层化的QoS模型 ISO术语 (1) 把peer-to-peer negotiation 称作Caller-to-caller协商 (2) 把Layer-to-layer协商称作Service-user(业务用户)-to-Service-provider(业 务提供者)之间的协商。
9
三角边界目标协商类型 (Triangular Negotiation for a Bounded Target)
Peer-to-Peer
Caller
Negotiation Target Available QoS Value Selected QoS Value QoS Value Lowest Quality Acceptable Connect Request
14
QoS Translation 特征
按照QoS Layering模型: (1) Human Interface-Application QoS Translation
翻译
- Tuning Service:人机用户 层协商后QoS值的输出。
应用层QoS
- 直观翻译手段:借助于GUI(图形用户接口),表达对输入的QoS和与应用
11
QoS Broker(QoS代理/QoS经纪人)
代理/经纪人(Agent/Broker) (1) 在人类日常活动中,代理是那些具有专门知识(长)的中间人。 (2) 比代理技术专长更高,服务项目相对更窄。 大财团的经纪人,要求 2.多媒体中的代理/经纪人
用户 厂商 代理(Agent) 代理(Agent )
3. Klara Nahrstedt 提出的QoS Broker模型(方案)用于实现在应用操作系统 (os) 网络传输协议之间的协商。
User and Application
"accept'/"modify" Negotiate Application QoS Parameters QoS Request "reject" "accept'/"modify" Negotiate system QoS Parameters QoS Request "reject" "accept'/"modify" Negotiate network QoS Parameters QoS Request "reject" Qos Broker
(Bilateral Layer-to-layer Negotiation) 单边协商 (Unilateral Negotiation) 混合协商 (Hybrid Negotiation) 三边协商
(Triangular Negotiation for Info. Exchange) 三角边界目标协商类型 (Triangular Negotiation for a Bounded Target)
Multimedia Application Requirements 人来定义 协商(negotiation) 协商( negotiation)
资 资 资 资资 资
1.peer-to-peer negotiation
Application to application negotiation
Layer-to-layer协商 2 . Layer - to - layer 协商
Connect Confirm
Connect Request
t4
t1
Service Provider
t2
t3
8
三角边界目标协商类型 (Triangular Negotiation for a Bounded Target)
与以上所讲的类型相近,不同之处在于 --QoS参数值是由两个边界参数给出的 target(average) value minimal value(最低可接受值) --目标是取得target value --做法是不允许业务提供者改变最低质量值,但允许它修改target Value(最低摄影师值如果不能由Service Provider 提供的话,就拒绝该连 接)。 --同样被叫业务用户最后确定target value,确定完以后通过确认原语 (confirm primitive) 还知主叫业务用户。
建立多媒体呼叫(Establishment Multimedia Call) 结束多媒体呼叫(Closing Multimedia Call)
建立multimedia call establishment (五步曲): (1) the application (or user)defines the reguired QoS. (2) QoS Parameter must be distributed and negotiated. (3) QoS Parameters between different layers must be translated if their representation is different. (4) QoS parameters must be mapped to resource requirement. (5) required resources must be admitted/reserved/allocated along the path between sender(s) and receiver(s) (释放)结束Close-down procedure : 释放资源:释放资源、释放连接