程序调试文档
程序调试报告

程序调试报告1. 引言本文档记录了XXX程序的调试过程及结果。
该程序旨在实现XXX功能,并在调试过程中遇到了一些问题和解决方案。
2. 调试过程2.1 确定问题在开始调试之前,我们首先对程序进行了初步分析和测试。
发现了以下问题:- 问题1:程序在某些特殊情况下崩溃。
- 问题2:界面显示不正确。
- 问题3:某些功能无法正常使用。
2.2 分析原因针对以上问题,我们进行了深入的分析,并确定了以下可能的原因:- 问题1:某些输入数据导致程序崩溃。
- 问题2:界面布局代码存在错误。
- 问题3:相关函数存在逻辑错误。
2.3 解决方案针对上述问题,我们采取了以下解决方案:- 问题1:通过对程序进行代码覆盖率分析,发现了可能导致崩溃的部分代码,并进行了修复。
- 问题2:对界面布局代码进行了调试和修正,确保显示正确。
- 问题3:对相关函数进行了逻辑分析,发现了逻辑错误并进行了修复。
2.4 调试结果在调试过程中,我们不断进行测试和优化,最终取得了以下结果:- 问题1:程序崩溃的情况已经得到了解决,现在程序可以正常运行。
- 问题2:界面显示已经恢复正常,布局问题已修复。
- 问题3:相关功能已恢复正常,可以正常使用。
3. 总结通过对XXX程序的调试过程,我们发现了一些问题并最终找到了解决方案。
在调试过程中,我们充分发挥了我们的能力,采取了简单且没有法律风险的策略。
在编写本文档时,我们遵循了这些原则,并尽量使用简洁明了的语言表达。
需要注意的是,本报告中涉及的内容均经过确认,并不包含无法确认的引用内容。
应用程序安装及调试指南
应用程序安装及调试指南1. 概述本文档旨在为您提供一份关于应用程序安装及调试的专业指南。
通过遵循本文档中的步骤,您将能够顺利地安装和调试您的应用程序,确保其正常运行。
本文档适用于各种操作系统和应用程序,您可以根据实际情况进行调整。
2. 准备工作在开始安装和调试应用程序之前,请确保您的计算机或设备满足以下基本要求:- 操作系统:请确保您的设备运行的是支持的操作系统,如Windows、macOS或Linux等。
- 硬件要求:根据应用程序的系统要求,确保您的设备具有足够的处理器、内存和存储空间。
3. 安装步骤以下是一般应用程序安装的步骤,具体步骤可能因应用程序和操作系统的不同而有所差异:3. 遵循安装向导:按照安装向导的提示,完成安装过程中的各项设置。
4. 选择安装路径:在安装过程中,您可以选择应用程序的安装路径。
建议选择易于访问的目录。
5. 完成安装:在安装向导中点击“完成”或“安装”按钮,应用程序将开始安装。
4. 调试步骤应用程序安装完成后,您可能需要进行调试以确保其正常运行。
以下是一些常见的调试步骤:1. 启动应用程序:双击应用程序的快捷方式或图标,启动应用程序。
2. 检查界面显示:确保应用程序的用户界面显示正常,没有明显的错误或异常。
3. 功能测试:测试应用程序的各项功能,确保其正常工作。
4. 错误日志:如果遇到问题,请查看应用程序的错误日志或系统日志,以获取有关问题的更多信息。
5. 查找解决方案:根据错误日志或问题描述,在官方网站、论坛或其他可靠来源寻找解决方案。
6. 更新驱动程序:如果应用程序依赖于特定的硬件设备,请确保相关的驱动程序已更新到最新版本。
7. 联系技术支持:如果问题仍然无法解决,请联系应用程序的技术支持团队寻求帮助。
5. 常见问题解答以下是一些常见的应用程序安装和调试问题,以及相应的解决方案:1. 问题:应用程序无法启动。
解答:检查是否正确安装了应用程序,并确保计算机的系统要求满足应用程序的运行需求。
程序安装与调试流程

程序安装与调试流程1. 简介本文档旨在介绍程序安装与调试的流程。
程序安装与调试是指将开发完成的软件程序安装到目标设备上,并进行验证和修复,以确保程序正确运行。
2. 安装流程以下是程序安装的流程步骤:1. 确定目标设备:首先需要确定要安装程序的目标设备,例如个人电脑、服务器或移动设备等。
2. 准备安装文件:将程序的安装文件准备好,通常是一个可执行文件或安装包。
3. 运行安装程序:双击安装文件或执行安装包,启动安装程序。
4. 阅读许可协议:在安装过程中,可能会出现许可协议页面,用户需要仔细阅读并同意协议才能继续安装。
5. 选择安装位置:安装程序会提示用户选择程序的安装位置,用户可以根据需要选择合适的位置。
6. 执行安装:点击安装按钮或确认按钮,开始执行程序的安装过程。
7. 等待安装完成:等待安装程序完成程序文件的拷贝和配置过程。
8. 完成安装:安装程序会提示安装完成,用户可以选择启动程序或关闭安装程序。
3. 调试流程以下是程序调试的流程步骤:1. 准备测试环境:在进行程序调试前,需要准备一个适当的测试环境,包括目标设备、开发工具等。
2. 启动调试工具:使用适当的开发工具,启动调试模式或调试器。
3. 设置断点:在程序的关键位置设置断点,以便在程序执行到该位置时暂停。
4. 运行程序:启动程序,让程序开始执行。
5. 逐步调试:通过逐步执行程序,观察程序的执行情况,并检查变量的值和程序的输出。
6. 跟踪错误:如果程序出现错误或异常,可以通过调试工具的跟踪功能,定位错误的原因。
7. 修复错误:根据定位到的错误原因,对程序进行修复和优化。
8. 重新调试:修复完成后,重新启动调试过程,验证修复后的程序是否正常运行。
4. 注意事项在程序安装与调试过程中,需要注意以下事项:- 确保目标设备满足程序的运行要求,包括硬件和软件环境。
- 在安装过程中,仔细阅读许可协议,并确保合法安装。
- 在调试过程中,注意观察程序的执行情况,以及变量的值和输出结果。
调试记录报告模板
调试记录报告模板前言调试记录报告是软件开发、测试过程中非常重要的一部分,其用途是记录问题、分析原因、记录解决方案的过程,为日后的工作提供参考资料。
调试记录报告应当清晰、简洁、全面,以便于开发人员、测试人员、产品经理等各方能够快速地了解问题和解决方案。
本文档提供一个调试记录报告模板,希望能够为您的日常工作提供一些帮助。
问题描述在调试过程中,首先应当描述问题的详细情况。
包括但不限于小标题、问题描述、复现步骤等。
具体格式如下:小标题请使用一句话简洁地描述问题。
问题描述请描述问题的详细情况。
复现步骤请详细描述问题的复现步骤。
原因分析在描述完问题后,应当分析问题的原因。
分析应该详细、准确、全面、有据可依,包括但不限于小标题、原因分析、证据支持等。
具体格式如下:小标题请使用一句话简洁地描述原因。
原因分析请分析自己对问题原因的猜测,详细说明每一种可能性,并列出每种可能性的证据支持。
证据支持请列出每种可能性的证据支持,以便有利于后续的问题分析和解决。
解决方案在确定问题原因后,应当制定相应的解决方案。
解决方案应当简洁、明确、可行。
具体格式如下:小标题请使用一句话简洁地描述解决方案。
解决方案请详细说明解决方案的步骤,并列出每个步骤的具体操作方法。
参考资料请列出使用到的参考资料,以便有利于后续的问题分析与解决。
结语通过本文档提供的调试记录报告模板,您可以在日常工作中更加高效地记录和解决问题。
希望此文档能够对您有所帮助。
智能农业控制系统施工调试方法及程序
智能农业控制系统施工调试方法及程序简介本文档旨在介绍智能农业控制系统施工调试的方法和程序。
智能农业控制系统是一种利用现代技术,实现农业生产过程智能化管理的系统。
通过对传感器数据的采集、分析和控制指令的发送,智能农业控制系统能够实现精确的农业生产管理,提高农作物生产的效率和质量。
施工调试方法智能农业控制系统的施工调试主要涉及硬件设备的安装和连接、软件系统的配置和测试等方面。
以下是一般的施工调试方法:1. 硬件设备安装和连接- 首先,根据系统需求,选择合适的传感器和执行器设备,并按照设备说明书进行安装。
- 然后,将各个设备连接到主控制器或数据采集设备上,确保连接正确可靠。
2. 软件系统配置- 首先,根据实际情况,配置系统的基本信息,包括农作物种类、生长环境参数等。
- 然后,配置传感器的采集频率和采集位置,确保能够准确获取农作物生长过程中的数据。
- 接着,配置执行器的控制策略和执行条件,确保能够精确控制农作物生长环境。
3. 系统测试- 首先,进行硬件设备的功能测试,确保设备的正常工作。
- 然后,进行软件系统的功能测试,包括数据采集和控制指令发送等,确保系统的稳定性和可靠性。
- 最后,进行整体系统的综合测试,模拟实际的农业生产环境,验证系统的性能和效果。
施工调试程序为了保证施工调试工作的有序进行,建议按照以下的程序进行:1. 制定施工调试计划:根据系统需求和工期安排,制定施工调试计划,明确施工调试的任务和时间节点。
2. 安装硬件设备:按照设备说明书进行硬件设备的安装,确保设备安装正确可靠。
3. 连接设备和主控制器:将各个设备连接到主控制器或数据采集设备上,确保连接正确可靠。
4. 配置软件系统:根据实际情况配置软件系统的基本信息、传感器采集参数和执行器控制策略等。
5. 进行功能测试:进行硬件设备和软件系统的功能测试,确保设备和系统的正常工作。
6. 进行综合测试:进行整体系统的综合测试,验证系统在实际生产环境中的性能和效果。
智能能源管理系统施工调试方法及程序

智能能源管理系统施工调试方法及程序概述本文档旨在介绍智能能源管理系统的施工调试方法和程序。
智能能源管理系统是一种集成了先进技术的系统,用于监控和管理能源消耗和使用情况,以提高能源利用效率并降低能源消耗成本。
施工调试方法下面是智能能源管理系统的施工调试方法:1. 确定需求:与客户沟通,确定系统的功能和需求,包括能源监控、控制和报表生成等方面的需求。
2. 设计系统架构:根据客户需求,设计系统的硬件和软件架构,包括传感器、数据采集设备、数据存储和分析平台等。
3. 选择设备和材料:根据系统设计,选择合适的设备和材料,包括传感器、控制器、通信设备等。
4. 安装设备和布线:按照设计图纸和安装说明,安装设备并进行布线,确保设备正常运行。
5. 连接网络和云平台:将设备连接到网络,并进行必要的配置和测试,确保数据可以传输到云平台进行存储和分析。
6. 系统配置和参数设置:根据客户需求和系统设计,对系统进行配置和参数设置,包括能源测量单位、报警阈值等。
7. 调试和测试:对系统进行调试和测试,确保各个组件和功能都正常工作。
8. 用户培训:为客户提供系统使用和维护的培训,确保客户能够正常操作和管理智能能源管理系统。
施工调试程序智能能源管理系统的施工调试程序如下:1. 需求确认阶段:与客户沟通,了解需求并制定详细的技术规格和设计方案。
2. 设备采购和准备阶段:根据技术规格和设计方案,采购设备和材料,并进行配送和准备工作。
3. 施工安装阶段:根据技术规格和设计方案,进行设备安装和布线工作。
4. 网络和云平台连接阶段:将设备连接到网络,并进行必要的网络配置和云平台接入工作。
5. 系统配置和参数设置阶段:根据技术规格和设计方案,对系统进行配置和参数设置。
6. 调试和测试阶段:对系统进行调试和测试,确保系统的各个功能和组件正常工作。
7. 用户培训阶段:为客户提供系统使用和维护的培训,确保客户能够熟练操作和管理智能能源管理系统。
总结本文档介绍了智能能源管理系统施工调试方法和程序。
第16章 常见错误和程序调试-精选文档
-215~215-1,即-32768~32767。常见这样的程序 段: int num; num=89101; printf("%d",num); • 得到的却是23565,原因是89101已超过32767。两 个字节容纳不下89101,则将高位截去。见图16.1。 即将超过低16位的数截去。即将89101减去216(即 16位二进制所形成的模)。89101-65536=2其他字符必须按原样输入。因此,应按以下方 法输入: 3, 4 此时如果用“34”反而错了。还应注意,不能企图 用 scanf("input a & b:%d,%d",&a,&b); 想在屏幕上显示一行信息: input a & b: 然后在其后输入a和b的值,这是不行的。这是由 于有的读者以为scanf具有BASIC语言中的INPUT 语句的功能(先输出一个字符串,再输入变量的值)。 如果想在屏幕上得到所需的提示信息,可以另加 一个printf函数语句:printf("input a & b:");
• C要求对程序中用到的每一个变量都必须定义其 类型,上面程序中没有对x、y进行定义。应在函 数体的开头加int x,y;这是学过BASIC和 FORTRAN语言的读者写C程序时常见的一个错误。 在BASIC语言中,可以不必先定义变量类型就可 直接使用。在FORTRAN中,未经定义类型的变 量按隐含的I-N规则决定其类型,而C语言则要求 对用到的每一个变量都要在本函数中定义(除非已 定义为外部变量)。 • (2) 输入输出的数据的类型与所用格式说明符不一 致。 • 例如,若a已定义为整型,b已定义为实型。
16.1 常见错误分析
• 下面将初学者在学习和使用C语言(不包括C++)时 容易犯的错误列举出来,以起提醒的作用。这些 内容在以前各章中大多已谈到,为便于查阅,在 本章中集中列举,供初学者参考,以此为鉴。 • (1) 忘记定义变量。如: main( ) {x=3; y=6; printf("%d\n ",x+y); }
【捷顺科技】JSMJY08A调试文档
1JSMJY08A 门禁调试一、设备概述JSMJY08A 门禁是在原Y08的基础上进行升级,优化外观结构、扫码效率、网页配置。
因此JSMJY08A 是一款外观精美,安装简便,支持刷卡、蓝牙、二维码、手机APP 、按钮等多种开门方式的一款互联网门禁设备。
除了当一体式门禁使用外,还可以当领御梯控访客的呼梯读卡器来使用(IE 中设置读卡器模式)。
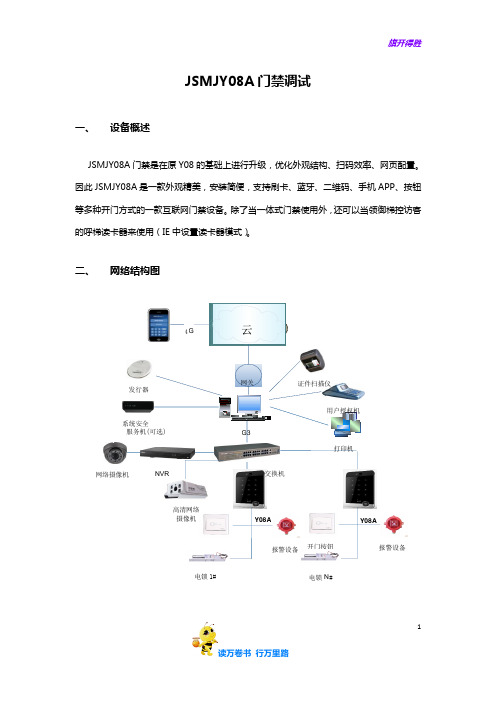
二、 网络结构图用户授权机开门按钮 交换机G3系统安全服务机(可选)NVR网络摄像机高清网络 摄像机电锁1#开门按钮电锁 N #Y08A Y08A证件扫描仪发行器打印机4 G网关报警设备报警设备 云三、产品介绍1产品外观2产品参数支持卡类:IC卡、CPU卡、捷顺通卡、业主\访客二维码、手机蓝牙。
应用模式:门禁模式、读卡器模式注:业主二维码、手机蓝牙应用需要搭配捷生活APP使用。
当读卡器模式应用时,只能当领御梯控访客的读卡器。
3产品接口正面图背面图23线槽局部视图 从右到左1~8四、 产品安装规范1 产品外形安装尺寸电源输入 1 红 +12V 2 黑 GND 信号输入3 白 MC4 绿BUTTON 5 黄FIRE 锁干接点输出6 棕NO 7 紫 COM 8 灰NC2产品安装示意图安装前,需先把装墙板螺钉拆下,取出装墙板,用M4x20的螺钉把装墙板固定在86盒上,确定防撬磁铁位置正确后,把门禁上面壳的扣位对正装墙板的扣位,把门禁上部压到底,再把门禁往上推,然后把门禁压入装墙板,打上M3x6的装墙板螺钉。
1. 2. 3.五、系统调试1调试流程图安装SQL2008 安装软件打开软件建立门禁工作站,并开、关一次人行终端软件参数下载硬件初始化设备注册4调试过程中需要用到的软件:G3物业版一卡通管理软件V3.3.0 SP1及以上版本、浏览器、Y08A门禁程序版本V2.0➢一卡通管理软件:住宅物业专业版管理软件V3.3.0 SP1。
G3标准版2017V1.0.0➢浏览器:IE浏览器/火狐浏览器➢Y08A门禁程序发布版本:V2.02硬件调试拆下装墙板,防撬磁铁脱离Y08A设备,设备处于防撬报警状态,扫描恢复出厂设置专用二维码,设备会产生一次长鸣,指示灯变为黄灯,恢复出厂设置成功后,设备会有连续的“嘀”-“嘀”声,恢复出厂设置成功后,设备IP变成192.168.0.2。
Android开发和调试中文文档
Android中文文档:开发和调试在eclipse上开发Android应用程序在用eclipse IDE开发android应用程序之前,你首先要创建一个Android工程,并且建立一个启动配置,在此之后你才可以开始编写,运行,以及调试你的应用程序。
以下章节是假设你已经在eclipse环境中安装了ADT插件,如果你没有安装,请安装之后再使用以下说明。
参考安装eclipse 插件(ADT)创建一个android工程ADT提供了一个新的工程向导,你可以快速的创建一个新的工程或者在现有代码上创建工程。
创建工程的步骤如下:选择File > New > Project选择 Android > Android Project, 然后按下 Next选择项目内容:选择 Create new project in workspace,为编码创建一个全新的工程。
输入工程名称(project name),基础软件包的名称(the base package name),以及Activity 类的名称。
以创建stub .java文件等文件和程序名字。
选择Create project from existing source ,为已有代码创建一个工程。
如果你想编译运行SDK中提供的示例程序,可以使用这个选项。
示例程序的存放在SDK的samples/目录下。
浏览包含已有代码的目录,点击ok,如果目录中包含有可用的android manifest 文件,ADT 将为你填写合适的软件包,activity,和应用程序名称。
按下Finish.ADT插件会根据你的工程类型创建合适的文件和文件夹,如下:src/ 包含stub .java Activity文件的文件夹.res/ 资源文件夹.AndroidManifest.xml 工程清单.创建一个启动项能够在eclipse上运行调试应用程序之前,你必须为它创建一个启动项。
调试操作规程

调试操作规程
《调试操作规程》
在软件开发过程中,调试是一个非常重要的环节。
通过调试,可以找到程序中的错误,并且修复它们。
为了保证调试工作的顺利进行,我们需要遵守一些操作规程。
首先,要对程序进行充分的测试。
在发布程序之前,我们需要进行多次的测试,确保程序没有明显的错误。
只有在测试通过之后,我们才能进行调试工作。
其次,要对程序进行全面的分析。
当发现错误时,我们需要对程序进行仔细的分析,找出错误的根源。
只有找到了错误的根源,我们才能有针对性地进行调试工作。
第三,要使用好调试工具。
在进行调试工作时,我们需要使用一些专门的调试工具,比如调试器、性能分析器等。
这些工具可以帮助我们更快地找到错误,并且修复它们。
第四,要遵循一定的调试流程。
在进行调试工作时,我们需要按照一定的流程来进行操作,比如先定位错误的位置,然后对错误进行复现,最后进行修复。
只有按照一定的流程来进行操作,我们才能更加高效地进行调试工作。
总的来说,调试操作规程是非常重要的,只有遵守了这些规程,我们才能更加顺利地进行调试工作,并且修复程序中的错误。
希望大家在进行调试工作时,能够按照规程来进行操作,从而提高调试工作的效率和质量。
ABB逻辑编程软件PCM600调试经验文档
ABB 615系列逻辑编程软件PCM600调试文档目录1、安装 (3)1.1 打开PCM600V2.6安装程序 (3)1.2 按照提示点击“Next”逐步进行安装 (3)1.3 选择相应的组件 (3)1.4 选择安装类型 (3)1.5 按照提示进行软件安装 (4)1.6 安装SQL Server 2008 (4)1.7 完成PCM600安装 (4)1.8 安装链接包 (4)1.9 安装中文包 (5)2、使用 (5)2.1 设置语言 (5)2.2 界面调整 (6)2.3 新建设备 (6)2.4 设置技术键 (9)2.5 读取装置/写入装置 (10)2.6 定值整定 (11)2.7 应用配置 (12)2.8 导入/导出 (13)1、安装1.1 打开PCM600V2.6安装程序1.2 按照提示点击“Next”逐步进行安装1.3 选择相应的组件a.Protection and Control IED Manager PCM600为整定程序,必须勾选;b.Generic IEC61850 IED Connectivity Package是设备IEC61850规约通讯组件,建议勾选;c.Adobe Reader X是说明文档PDF阅读器,若有需要也可以勾选,已经由PDF阅读器则可以不装;d. Wavewin ABB是ABB的故障录波分析软件,视现场情况选择。
1.4 选择安装类型建议选择“Typical”,即典型安装方式。
1.5 按照提示进行软件安装1.6 安装SQL Server 2008PCM600逻辑编程软件依赖于SQL数据库,在安装过程中会自动安装SQL2008并自动命名为。
若已经安装了SQL2008数据库的电脑则会有相应提示,直接采用本电脑的SQL2008数据库即可。
1.7 完成PCM600安装安装完成后,在桌面上会形成一个PCM600的图标1.8 安装链接包每种ABB 615系列装置,都有相应的设备链接包,在使用之前需要先了解现场相应的设备型号,如REF 615/REM 615等,安装相应的设备链接包。
应用程序安装及调试指南

应用程序安装及调试指南介绍本文档旨在提供一份应用程序安装及调试的指南,以帮助用户顺利完成安装和解决调试过程中的常见问题。
安装步骤以下是应用程序的安装步骤:2. 双击安装包,启动安装向导。
3. 阅读并接受软件许可协议。
4. 选择安装位置和其他自定义选项。
5. 点击“安装”按钮,开始安装过程。
6. 等待安装完成。
7. 点击“完成”按钮,退出安装向导。
调试指南在应用程序调试过程中,可能会遇到一些常见问题。
下面是一些常见问题及解决方法:1. 应用程序崩溃或无法启动如果应用程序崩溃或无法启动,请尝试以下方法:- 重新启动计算机,并尝试再次启动应用程序。
- 检查系统要求,确保您的计算机满足应用程序的最低系统要求。
- 卸载并重新安装应用程序,以确保安装过程正确完成。
2. 应用程序运行缓慢如果应用程序运行缓慢,请尝试以下方法:- 关闭其他占用系统资源的程序,以释放更多的系统资源给应用程序使用。
- 检查您的计算机是否有足够的可用存储空间。
- 更新您的操作系统和应用程序,以确保您使用的是最新版本。
- 调整应用程序的设置,例如减少图形效果或禁用不必要的功能。
3. 应用程序显示错误消息如果应用程序显示错误消息,请尝试以下方法:- 仔细阅读错误消息,并查找相关的解决方法。
- 在应用程序的官方网站或用户论坛中搜索该错误消息,以找到其他用户的解决方案。
- 如果问题仍然存在,请联系应用程序的技术支持团队寻求帮助。
结论本文档提供了应用程序安装及调试的指南,希望能帮助用户顺利完成安装过程并解决常见的调试问题。
如果遇到无法解决的问题,请寻求相应的技术支持。
动、静设备调试程序

动、静设备调试程序1. 背景该文档旨在提供动、静设备调试程序的说明和步骤,以确保设备在安装和调试过程中能够正常运行。
2. 设备调试前的准备工作在开始设备调试之前,需要进行以下准备工作:- 检查设备的物理连接,确保所有电源线和信号线正确连接。
- 确认设备所需的软件和驱动程序已经安装并正常运行。
- 确保调试设备的操作系统和其他软件已经进行了更新和配置。
3. 动、静设备调试程序步骤以下是动、静设备调试程序的步骤:步骤一:动设备调试1. 打开设备的电源,并确保设备处于待机或启动状态。
2. 检查设备是否正常启动,并观察设备是否显示任何错误信息或警告。
3. 检查设备的物理连接,确保设备与其他设备正常连接,并且信号传输无误。
4. 在动设备上执行所需的操作,例如按下按钮或拨动开关,观察设备的反应和功能是否正常。
步骤二:静设备调试1. 打开设备的电源,并确保设备处于待机或启动状态。
2. 检查设备是否正常启动,并观察设备是否显示任何错误信息或警告。
3. 检查设备的物理连接,确保设备与其他设备正常连接,并且信号传输无误。
4. 通过设备的控制面板或程序界面配置设备参数,确保设备在静态模式下运行正常。
步骤三:测试和验证1. 在完成动、静设备调试后,使用合适的测试方法验证设备的功能和性能。
2. 检查设备的输出是否符合预期要求,并确保设备满足设定的规范和标准。
3. 对设备进行持续的监测和测试,以便及时发现和解决任何潜在问题。
4. 结论通过按照上述步骤进行动、静设备的调试程序,可以确保设备在安装和调试过程中能够正常运行。
在调试过程中,建议根据具体设备的特点和要求进行调整和优化。
1000D调试文档
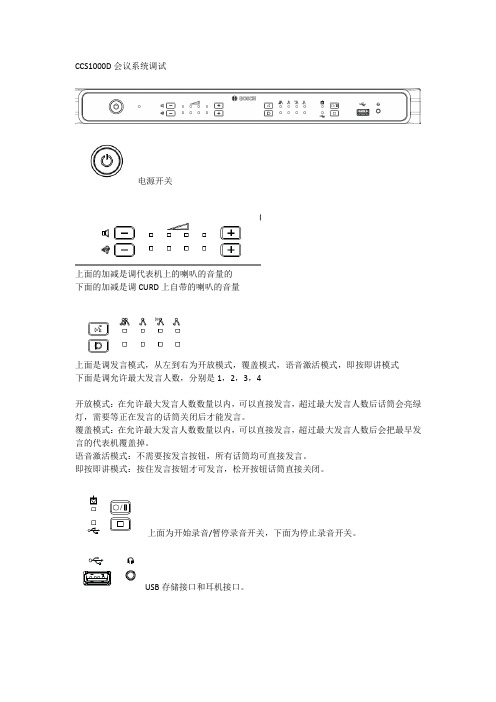
CCS1000D会议系统调试电源开关上面的加减是调代表机上的喇叭的音量的下面的加减是调CURD上自带的喇叭的音量上面是调发言模式,从左到右为开放模式,覆盖模式,语音激活模式,即按即讲模式下面是调允许最大发言人数,分别是1,2,3,4开放模式:在允许最大发言人数数量以内,可以直接发言,超过最大发言人数后话筒会亮绿灯,需要等正在发言的话筒关闭后才能发言。
覆盖模式:在允许最大发言人数数量以内,可以直接发言,超过最大发言人数后会把最早发言的代表机覆盖掉。
语音激活模式:不需要按发言按钮,所有话筒均可直接发言。
即按即讲模式:按住发言按钮才可发言,松开按钮话筒直接关闭。
上面为开始录音/暂停录音开关,下面为停止录音开关。
USB存储接口和耳机接口。
电脑需要安装CCS1000D系统光盘内的Tools/SetupBoschDNS-SDService.exe插件,64位系统请安装64位插件。
将电脑与1000D主机通过网络连通后,把电脑的IP地址设置为自动获取。
然后打开浏览器,输入地址:ccs1000d.local。
出现登录对话框。
此对话框用于通过用户名(选择“操作员”或“技术人员”) 和密码登录到讨论应用程序。
用户还可以选择首选的应用程序语言。
登录帐号默认为admin,密码默认为空。
登录成功后,即可进行配置。
修改主席优先模式:进入“准备会议”选项下方可更改优先模式。
–优先提示音:选中此项时,如果使用设备优先按钮,则将听到优先提示音。
–使所有发言人静音:选中此项时,如果使用设备优先按钮,则将暂时使所有发言人静音。
–停止所有发言人并删除所有等待的与会人员:选中此项时,如果使用设备优先按钮,则会取消所有发言人和请求。
如何设置主席单元:用按钮更换工具将代表待援的发言按钮从底部顶出来,将主席按钮换上去,然后把底部的拨码拨为1即可。
一套1000D会议系统最多支持2个主席单元。
按下recall按钮,寻找2in6out free configuration默认配置,按store调用。
传奇项目调试文档
传奇项目调试文档.txt我的优点是:我很帅;但是我的缺点是:我帅的不明显。
什么是幸福?幸福就是猫吃鱼,狗吃肉,奥特曼打小怪兽!令堂可是令尊表姐?我是胖人,不是粗人。
调试传奇服务器程序操作步骤:一:搭建环境1. 安装delphi62. 安装JSocket组件(说明:JSocket文件夹下包含有七个文件Jacky.cfg,Jacky.dof,Jacky.dpk,Jacky.res,JNetwork.pas,JSocket.pas,O.JSocket.pas。
)2.1将JSocket文件夹拷贝到delphi的lib文件夹下(作者实例: C:\Program Files\Borland\Delphi6\Lib)2.2 运行delphi->Component->Install Component…->弹出Install Component窗口->Into existing package->点击Unit file name所对应的Browse…按钮->找到并选择Jsocket.pas(文件作者实例: C:\Program Files\Borland\Delphi6\Lib\JSocket)->下面的操作都是点击确认或者保存二:编译传奇服务器程序依次打开并编译source文件下的各个工程,成功编译并生成可执行文件和其他相应文件。
这些文件位于Release文件夹下对应的文件夹中三:运行服务器端程序依次运行release文件下的七个可执行程序,M2Server.exe,LogDataServer.exe,DBServer.exe,LoginSrv.exe,RunGate.exe,SelGate.exe,LoginGate.exe。
七个可执行程序同时正常运行。
调试传奇客户端程序操作步骤:一:搭建环境1.安装delphix组件1.1将DelphiX_D6文件夹移动到delphi的lib文件夹下(作者实例: C:\Program Files\Borland\Delphi6\Lib)1.2 双击DelphiX_D6文件夹里的DelphiX_for6.dpk->弹出一个窗口,点击标题栏中的install按钮->下面的操作都是点击确认或者保存2. 安装TWMImages组件2.1 将WIL.pas,wmUtil.pas,MudUtil.pas,HUtil32.pas,EncryptUnit.pas,EDcode.pas,DWinCtl.pas文件拷贝到delphi的lib文件夹下2.2运行delphi->Component->Install Component…->弹出Install Component窗口->Into existing package->点击Unit file name所对应的Browse…按钮->找到并选择WIL.pas->下面的操作都是点击确认或者保存二:编译传奇服务器程序用delphi打开客户端的mir2.dpr工程文件,编译提示:Could not create output file '..\..\Build\Mir2\JSocket.dcu'(解决方法:运行delphi->Project->弹出Project Options窗口->Directories/Conditionals->点击Output directory所对应的…按钮,选择一个合适的文件夹(作者实例:D:\company\传奇源代码\Release\Mir2)->点击Unit output directory所对应的…按钮,选择一个合适的文件夹(作者实例:D:\company\传奇源代码\Build\Mir2)->点击OK按钮)再次编译,提示:file not found grobal2.dcu(解决方法:找到grobal2.dcu将其拷贝到客户端程序所在的文件夹下)类似的问题解决方法同上成功编译,客户端整个界面是黑的,鼠标是个蓝色的圆旋不停的转编译只生成一个可执行程序,位于Release\Mir2(解决方法:1:将CLMain.pas文件中第262行至657行的代码替换为CSocket.Address := '121.14.151.154' ;//服务器的ip地址CSocket.Port :=7000;//////////////////////////////////////////////////////////////////////////////// ////////*第262行至657行的代码:if g_sMainParam1 = '' then beginCSocket.Address:=g_sServerAddr;CSocket.Port:=g_nServerPort;end else beginif (g_sMainParam1 <> '') and (g_sMainParam2 = '') thenCSocket.Address := g_sMainParam1;if (g_sMainParam2 <> '') and (g_sMainParam3 = '') then beginCSocket.Address := g_sMainParam1;CSocket.Port := Str_ToInt (g_sMainParam2, 0);end;if (g_sMainParam3 <> '') then beginif CompareText (g_sMainParam1, '/KWG') = 0 then begin{CSocket.Address := kornetworldaddress; //'; CSocket.Port := 9000;BoOneClick := TRUE;OneClickMode := toKornetWorld;with KornetWorld do beginCPIPcode := MainParam2;SVCcode := MainParam3;LoginID := MainParam4;CheckSum := MainParam5; //'dkskxhdkslxlkdkdsaaaasa';end;}end else beginCSocket.Address := g_sMainParam2;CSocket.Port := Str_ToInt (g_sMainParam3, 0);BoOneClick := TRUE;end;end;end;*///////////////////////////////////////////////////////////////////////////////// /////////////////////////2:将编译文件输出路径指向热血传奇客户端可执行程序的文件夹)。
新时达调试文件【精选文档】

F板调试指导性文件一.概述:SM-01-F主板是目前新时达电气公司应用最为广泛的增强性主板,它具有两种编码器反馈口,具有模拟量速度给定和多段速速度给定,适用各种变频器;主板配备了液晶操作器,支持手持编程器,以及专用电脑软件包进行调试;模拟量速度给定可以实现直接停靠功能;全串行CAN总线通讯,能实现2台电梯的并联以及3台以上电梯的群控.二.F参数:F0 加速斜率 50F1 减速斜率 50F2 S曲线T0 130F3 S曲线T1 110F4 S曲线T2 110F5 S曲线T3 130F6 电梯额定速度 160F7 电梯额定转速 1440F8 编码器脉冲数 600F9 基站 1F10 楼层偏置 0F11 预设总层数 24F12 检修速度 25F13 返平层速度 6F14 关门延时1 40F15 关门延时2 25F16 抱闸延时1 10F17 抱闸延时2 5 模拟量 20 数字量F18 消防基站 1F19 锁梯基站 1F20 返基时间 0F21 平层感应器延时补偿 73F22 并联基站 1F23 并联模式 0F24 驱动模式 1 模拟量 0 数字量 4 配KEB的数字量F25 输入类型1 X0-X15 481F26 输入类型2 X16-X31 0F27 输入类型3 TX0—TX15 7F28 输入类型4 TX16-TX31 0F29 停靠层站1 1-16 65535F30 停靠层站2 17-32 65535F31 停靠层站3 33-48 65535F32 停靠层站4 49-64 65535F33 主停层站 0F34 称重设置 0F35 消防模式 0:消防梯模式 1:火灾返回F36 抱闸开关检测 0 无检测F37 备用F38 备用F39 备用F40 备用F41 备用F42 0 抱闸释放立刻开门不是0 等CY释放才开门(半串行经济板)F43 备用F44 串行通讯本机地址 255F45 单层减速距 160F46 双层减速距 320F47 多层减速距 320F48 地下层站 0F49 返基有效 0 无效 1 有效F50 前开门允许1 65535F51 前开门允许2 65535F52 前开门允许3 65535F53 后开门允许1 0F54 后开门允许2 0F55 后开门允许3 0F56 上平层调整 50F57 下平层调整 50F58 提前开门 1有效 0无效F59 设置专用码 0 无专用码F61 王春祥程序 1 跑一层到满速 2 跑两层到满速 3 跑三层到满速 4 跑四层到满速蔡亮程序 0 有开门输出 1 无开门输出F62 曳引保护时间F64 检修时的开关门 1检修有开关门 0无开关门三.故障代码:02: 运行中门锁脱开(急停)03:错位(超过45CM),撞到上限位开关时修正,即层楼置为最高层04: 错位(超过45CM),撞到下限位开关时修正,即层楼置为最底层05: 电梯到站无法开门06: 关门关不上,蜂鸣器响08:通讯中断09:变频器出错,急停,停止运行10: 错位(超过45CM),撞到上终端减速开关时修正11: 错位(超过45CM),撞到下终端减速开关时修正12:错位(超过45CM),撞到上终端减速开关时修正13:错位(超过45CM),撞到下终端减速开关时修正15:变频器运行2S内未输出运行信号到SM—01的JP2.10(X19)16:变频器运行信号在上抱闸前无17:参数错误18:写层时层楼不符20:打滑保护22:电梯反向溜车23: 电梯超速急停24:电梯失速急停28:下平层光电故障31:电梯溜车急停32:安全回路断开急停33:电机电源接触器保护,停止启动34:抱闸接触器保护,停止启动35:抱闸接触器保护,停止启动36:电机电源接触器保护,停止启动37: 门锁继电器保护,停止启动38:抱闸开关故障39:安全回路的触点保护40:KMC接触器粘连保护44:门区开关动作不正确45:开门再平层继电器触点保护49:在开门到位的状态下厅门锁与轿门锁不一致50:厅门锁与厅门锁继电器检测不一致51:门连续受阻超过3次52:开门再平层超过10秒仍不平53:控制调速器进线接触器信号与调速器进线接触器触点检测不一致四.主板慢车调试:1.确保安全回路,门锁回路通,观察主板左上方的B(门锁高压检测),C(安全回路高压检测)灯亮;2.确保上下行限位开关,上下行单层强迫减速开关通,观察主板上方LED(6,7,8,9)灯亮;3.基本参数设置:F6(电梯额定速度);F7(电机额定转速);F8(编码器脉冲数);F11(总的楼层数).4.注意观察,检修上行主板上的速度显示为“正”,检修下行主板上的速度显示为“负",并且显示数值与设定速度要相差不大,如果上下“正负"相反,请交换主板上的编码器反馈口:推挽编码器JP8。
CY8CKIT-005 MiniProg4程序调试套件指南文档说明书

CY8CKIT-005Kit Guide Doc. # 002-19782 Rev. *BCypress Semiconductor198 Champion Court San Jose, CA 95134-1709CopyrightsCopyrights© Cypress Semiconductor Corporation, 2018-2019. This document is the property of Cypress Semiconductor Corporation and its subsidiaries ("Cypress"). This document, including any software or firmware included or referenced in this document ("Software"), is owned by Cypress under the intellectual property laws and treaties of the United States and other countries worldwide. Cypress reserves all rights under such laws and treaties and does not, except as specifically stated in this para-graph, grant any license under its patents, copyrights, trademarks, or other intellectual property rights. If the Software is not accompanied by a license agreement and you do not otherwise have a written agreement with Cypress governing the use of the Software, then Cypress hereby grants you a personal, non-exclusive, nontransferable license (without the right to subli-cense) (1) under its copyright rights in the Software (a) for Software provided in source code form, to modify and reproduce the Software solely for use with Cypress hardware products, only internally within your organization, and (b) to distribute the Software in binary code form externally to end users (either directly or indirectly through resellers and distributors), solely for use on Cypress hardware product units, and (2) under those claims of Cypress's patents that are infringed by the Software (as provided by Cypress, unmodified) to make, use, distribute, and import the Software solely for use with Cypress hardware products. Any other use, reproduction, modification, translation, or compilation of the Software is prohibited.TO THE EXTENT PERMITTED BY APPLICABLE LAW, CYPRESS MAKES NO WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, WITH REGARD TO THIS DOCUMENT OR ANY SOFTWARE OR ACCOMPANYING HARDWARE, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PUR-POSE. No computing device can be absolutely secure. Therefore, despite security measures implemented in Cypress hard-ware or software products, Cypress shall have no liability arising out of any security breach, such as unauthorized access to or use of a Cypress product. CYPRESS DOES NOT REPRESENT, WARRANT, OR GUARANTEE THAT CYPRESS PROD-UCTS, OR SYSTEMS CREATED USING CYPRESS PRODUCTS, WILL BE FREE FROM CORRUPTION, ATTACK, VIRUSES, INTERFERENCE, HACKING, DATA LOSS OR THEFT, OR OTHER SECURITY INTRUSION (collectively, "Secu-rity Breach"). Cypress disclaims any liability relating to any Security Breach, and you shall and hereby do release Cypress from any claim, damage, or other liability arising from any Security Breach. In addition, the products described in these mate-rials may contain design defects or errors known as errata which may cause the product to deviate from published specifica-tions. To the extent permitted by applicable law, Cypress reserves the right to make changes to this document without further notice. Cypress does not assume any liability arising out of the application or use of any product or circuit described in this document. Any information provided in this document, including any sample design information or programming code, is pro-vided only for reference purposes. It is the responsibility of the user of this document to properly design, program, and test the functionality and safety of any application made of this information and any resulting product. "High-Risk Device" means any device or system whose failure could cause personal injury, death, or property damage. Examples of High-Risk Devices are weapons, nuclear installations, surgical implants, and other medical devices. "Critical Component" means any component of a High-Risk Device whose failure to perform can be reasonably expected to cause, directly or indirectly, the failure of the High-Risk Device, or to affect its safety or effectiveness. Cypress is not liable, in whole or in part, and you shall and hereby do release Cypress from any claim, damage, or other liability arising from any use of a Cypress product as a Critical Component in a High-Risk Device. You shall indemnify and hold Cypress, its directors, officers, employees, agents, affiliates, distributors, and assigns harmless from and against all claims, costs, damages, and expenses, arising out of any claim, including claims for product liability, personal injury or death, or property damage arising from any use of a Cypress product as a Critical Com-ponent in a High-Risk Device. Cypress products are not intended or authorized for use as a Critical Component in any High-Risk Device except to the limited extent that (i) Cypress's published data sheet for the product explicitly states Cypress has qualified the product for use in a specific High-Risk Device, or (ii) Cypress has given you advance written authorization to use the product as a Critical Component in the specific High-Risk Device and you have signed a separate indemnification agree-ment.Cypress, the Cypress logo, Spansion, the Spansion logo, and combinations thereof, WICED, PSoC, CapSense, EZ-USB, F-RAM, and Traveo are trademarks or registered trademarks of Cypress in the United States and other countries. For a more complete list of Cypress trademarks, visit . Other names and brands may be claimed as property of their respec-tive owners.Safety Information 41.Introduction51.1Kit Contents (5)1.2Programming and Debugging (5)1.3Bridging (5)1.4Documentation Conventions (6)2.Installing MiniProg472.1MiniProg4 (7)2.2MiniProg4 Installation (8)2.3MiniProg4 LEDs (10)2.4MiniProg4 Buttons (11)3.Technical Description123.1Interfaces (13)3.1.1SWD (13)3.1.2I2C (13)3.1.3SPI (13)3.1.4UART with and without Flow Control (13)3.1.5Reference (13)3.2Connectors (14)3.2.15-Pin Connector (14)3.2.210-Pin Connector (14)3.2.36x2 Connector (15)3.3Power (16)A.Appendix17A.1Regulatory Compliance Information (17)Revision History 18Safety InformationThe CY8CKIT-005 MiniProg4 Program and Debug Kit is intended for use as a development platform for hardware or software in a laboratory environment. In a domestic environment, this product may cause radio interference. In such cases, you may be required to take adequate preventive measures. In addition, this board should not be used near any medical equipment or RF devices.Attaching additional wiring to this product or modifying the product operation from the factory default may affect its performance and cause interference with other apparatus in the immediate vicinity. If such interference is detected, suitable mitigating measures should be taken.The CY8CKIT-005 MiniProg4 Program and Debug Kit, as shipped from the factory, has been verified to meet with the requirements of CE as a Class A product.General Safety InstructionsESD ProtectionESD can damage boards and associated components. Cypress recommends that you work on the board at an ESD workstation, if available. Otherwise, use appropriate ESD protection, such as anantistatic wrist strap attached to a ground, when handling parts.The CY8CKIT-005 MiniProg4 Program and Debug Kits are sensitive toelectrostatic discharge (ESD). Electrostatic charges accumulate on thehuman body and on other equipment. Devices that are subjected to high-energy discharges can suffer permanent damage. Proper ESDprecautions are recommended to prevent loss of functionality. Storeunused CY8CKIT-005 MiniProg4 Program and Debug Kits in theprotective shipping package.End-of-Life/Product RecyclingThe end-of life for this kit is five years from the date of manufacture mentioned as barcode on the back of the box. Contact your nearest recycler for discarding the kit.1IntroductionThe MiniProg4 Program and Debug Kit is an all-in-one programmer and debugger for PSoC 4,PSoC5LP, and PSoC 6 MCU devices. MiniProg4 also provides USB-I2C, USB-SPI and USB-UARTbridging functionality. The MiniProg4 provides a special feature enabling users to write their owncustom firmware through the custom application mode.Figure 1-1. MiniProg41.1Kit ContentsThe CY8CKIT-005 PSoC® MiniProg4 Program and Debug Kit includes:■MiniProg4 programmer/debugger■10-pin ribbon cable■USB Type-A to Type-C Cable■Quick Start Guide1.2Programming and DebuggingThe MiniProg4 programmer/debugger provides the flexibility to work with SWD programming anddebugging interfaces. MiniProg4 supports 32-bit Arm® Cortex®-M0/M0+/M3/M4 PSoC devices.The MiniProg4 debugger is supported by the software tools PSoC Creator, ModusToolbox™,Cypress Programmer, and PSoC Programmer.1.3BridgingMiniProg4 supports USB-I2C, USB-UART and USB-SPI as standard bridging protocols for anydevice. The MiniProg4 bridging capabilities are used by PSoC Creator, ModusToolbox, CypressProgrammer, PSoC Programmer, Bridge Control Panel, and other applications. Tuning softwaretools such as the CapSense Tuner provided by Cypress also use these capabilities.Introduction1.4Documentation ConventionsTable 1-1. Document Conventions for User GuidesConvention UsageCourier New Displays file locations, user-entered text, and source code: C:\...cd\icc\Italics Displays file names and reference documentation:Read about the sourcefile.hex file in the PSoC Designer User Guide.[Bracketed, Bold]Displays keyboard commands in procedures: [Enter] or [Ctrl] [C]File > Open Represents menu paths: File > Open > New ProjectBold Displays commands, menu paths, and icon names in procedures: Click the File menu, and then click Open.Times New Roman Displays an equation: 2 + 2 = 4Text in gray boxes Describes cautions or unique functionality of the product.2.Installing MiniProg4This chapter shows how to install MiniProg4 and its associated PC software.2.1MiniProg4Figure 2-1. Top ViewFigure 2-2. Bottom View2.2MiniProg4 InstallationThe MiniProg4 programmer/debugger is supported by PSoC Programmer, ModusToolbox, CypressProgrammer, and PSoC Creator. Other software, such as Bridge Control Panel, use the PSoCProgrammer COM layer to support MiniProg4 functionality.Note: PSoC Programmer is compatible only with the Windows Operating System however, CypressProgrammer is compatible with Windows, macOS, and Linux. To understand the differencesbetween PSoC Programmer and Cypress Programmer, please see the Cypress ProgrammingSolutions page at /products/psoc-programming-solutions.1.Download and install PSoC Programmer or Cypress Programmer. Follow the on-screeninstructions to install the software.Each programming tool supports a subset of Cypress devices. See respective tooldocumentation for which device each supports.unch PSoC Programmer or Cypress Programmer and connect the MiniProg4 to yourcomputer’s USB port using the provided USB cable. When properly connected, and drivers havebeen installed, the Mode LED either turns ON or will be ramping (slowly increasing anddecreasing brightness) depending on the mode.Note that the MiniProg4 drivers are automatically installed.3.In PSoC Programmer, to connect to the port, in the Port Selection pane, click the MiniProg4device. You can also click Connect/Disconnect button as shown in Figure2-3.If the connection is successful, a status indicator in the lower-right corner of the PSoCProgrammer window turns green and shows “Connected”.You can now use MiniProg4 to program the target device by clicking the Program button.Figure 2-3. PSoC Programmer: MiniProg4 Connect/Disconnect and ProgramFor more information on how to use PSoC Programmer, see Help Topics under the Help menuin PSoC Programmer or press [F1].In Cypress Programmer, to connect to the MiniProg4 probe, click Connect/Disconnect button as shown in Figure2-4.If the connection is successful, a status indicator in the lower-right corner of the CypressProgrammer window turns green and shows “Connected”.You can now use MiniProg4 to program the target device by clicking the Program button. Figure 2-4. Cypress Programmer: MiniProg4 Connect/Disconnect and ProgramFor more information on how to use Cypress Programmer, see View Help under the Help menu in Cypress Programmer or press [F1].2.3MiniProg4 LEDsMiniProg4 has three indicator LEDs - Mode (Amber), Status (Green), and Error (Red) as shown in Figure 2-5. Table 2-1 indicates the behavior of these LEDs for various operations.Figure 2-5. MiniProg4 LEDsTable 2-1. LED representation for various operations of MiniProg4Programming ModeProgramming Status Three LEDsMode Indicator (Amber LED)Status Indicator 1 (Green LED)Status Indicator 2 (Red LED)CMSIS-DAP HID ProgrammingRamping (1 Hz)8 Hz OFF SuccessON OFF ErrorOFF ON IdleOFF OFF CMSIS-DAP Bulk ProgrammingON 8 Hz OFF SuccessON OFF ErrorOFF ON IdleOFF OFF BootloaderN/A 1 Hz OFF OFF Custom Application N/A 8 Hz ON ONInstalling MiniProg42.4MiniProg4 ButtonsMiniProg4 has two buttons that enable switching between various operating modes. Figure2-6shows the location of the buttons. In order to understand switching MiniProg4 modes, refer toFigure2-7.On power-up, MiniProg4 is in CMSIS-DAP/BULK Mode by default. If the Mode Select button ispressed, MiniProg4 enters CMSIS-DAP/HID mode. If the Custom App button is pressed, MiniProg4enters custom application mode where a user can run their own custom applications on the MCUcontained in the MiniProg4. See Figure2-7 for details.For details of LED indications of various modes of MiniProg4, refer to Table2-1.Figure 2-6. MiniProg4 ButtonsFigure 2-7. Various MiniProg4 Button Modes3.T echnical DescriptionMiniProg4 is a protocol translation device. With MiniProg4, the PC host software can communicate through a USB port to the target device to be programmed or debugged, as shown in Figure 3-1.Table 3-1 lists the protocols that are supported by each connector. MiniProg4 enables communication with the target devices using I/O voltage levels from 1.5 V to 5 V. Figure 3-1. System Block DiagramTable 3-1. Connectors / Communication Protocol SupportConnector SWD I 2CSPIUART (With and Without Flow Control)5-pin Supported N/A N/A N/A 10-pin Supported N/A N/A N/A 6x2 headerN/ASupportedSupportedSupported3.1Interfaces3.1.1SWDARM-based devices support the Serial Wire Debug (SWD) protocol. The PSoC 4, PSoC 5LP, andPSoC 6 MCU device families implement this standard, which offers programming and debuggingfunctions. MiniProg4 supports programming and debugging of PSoC 4, PSoC 5LP, and PSoC6devices using SWD through the 5-pin or 10-pin connector.Before programming a PSoC 4, PSoC 5LP, or PSoC 6 MCU device, make sure you review theelectrical connection requirements in the respective device datasheet or in the PSoC 4, PSoC 5LP,and PSoC 6 MCU device programming specifications. You can find the datasheets andprogramming specifications here:/PSoC4/PSoC5LP/PSoC63.1.2I2CI2C is a common serial interface standard. It is mainly used for communication betweenmicrocontrollers and other ICs on the same board but can also be used for intersystemcommunications. MiniProg4 uses an I2C multimaster host controller that allows the tool to exchangedata with I2C-enabled devices on the target board. For example, this feature may be used to tuneCapSense® designs.MiniProg4 serves as a USB-I2C bridge (acts as I2C Master) that can be used to communicate with aI2C slave devices through the Bridge Control Panel software. For I2C connections use the 6×2connector. MiniProg4 has internal pull-up resistors and supports I2C speed up to 1 MHz.3.1.3SPIThe Serial Peripheral Interface (SPI) is a synchronous serial communication interface specificationused for short distance communication, primarily in embedded systems. SPI devices communicatein full duplex mode using a master-slave architecture with a single master.MiniProg4 serves as a USB-SPI bridge (acts as SPI Master) that can be used to communicate with aSPI slave devices through the Bridge Control Panel software. For SPI connections use the 6x2connector. MiniProg4 supports SPI speed up to 6 MHz.3.1.4UART with and without Flow ControlUART is another common serial interface standard. MiniProg4 supports UART, which allows the toolto receive data from UART enabled devices on the target board. MiniProg4 provides UARTcommunication both with and without hardware flow control. In order to enable flow control, RTS andCTS pins are provided in the 6x2 I/O header. If flow control is not required, CTS and RTS pins canbe left floating. Terminal emulators such as Tera Term or PuTTY can be used to communicate withthe target PSoC device. MiniProg4 supports UART speed up to 115200 Baud Rate.3.1.5ReferenceFor more information on the PSoC 4, PSoC 5LP, and PSoC 6 MCU's JTAG, SWD, and I2Cinterfaces, see the PSoC 4, PSoC 5LP, and PSoC 6 Technical Reference Manuals.For more details on how to use MiniProg4 with Bridge Control Panel, refer to the Bridge ControlPanel Help document.3.2Connectors3.2.15-Pin ConnectorThe 5-pin connector is configured as a single row with a 100-mil pitch. Suggested mating connectorpart number is Molex Connector Corporation 22-23-2051.Figure 3-2. 5-Pin Connector with Pin AssignmentsNote: If the design requires MiniProg4 to be directly plugged to the target board with a 5-pin header,adequate mechanical clearance shall be provided near the 5-pin header on the target board. Thewidth & height of MiniProg4 (5-pin header area) is 25mm x 13mm. If the design cannot meet therequired mechanical clearance, use a stackable header (such as Proto-PIC 20690).3.2.210-Pin ConnectorThe 10-pin connector is configured as a dual row with 50-mil pitch. It is used with a ribbon cable(provided) to mate to a similar connector on the target board. The signal assignment is shown inFigure3-3. Suggested mating connector part number is CNC Tech 3220-10-0300-00 or Samtec Inc.FTSH-105-01-F-DV-K-TR.Figure 3-3. 10-Pin Connector with Pin AssignmentsHere is a summary of the protocols and related pin assignments. The pin mapping is also shown on the back of the MiniProg4 case.3.2.36x2 ConnectorThis connector supports all the communication protocols like I 2C, SPI, UART (with or without flow control supported by MiniProg4). Figure 3-4 shows the pin assignments. They are also shown on the back of the MiniProg4 case.Figure 3-4. 6x2 Connector Pin AssignmentsTable 3-2. Communication Protocol Pin AssignmentsProtocolSignal 5-Pin 10-Pin SWDSDIO52SCK 44XRES3103.3PowerMiniProg4 can be powered using the USB interface.On kits/boards where there is a single power supply for the entire board, MiniProg4 can supplypower to the board. However, this supply is limited to approximately 200 mA, and is protectedagainst excess current draw. You can select 1.8 V, 2.5 V, 3.3 V, or 5 V from PSoC Programmer orCypress Programmer. The 5 V supply may vary between 4.25 V–5.5 V, because it is supplieddirectly from the USB port. The maximum deviation for other voltages is +5%.Note:Some PSoC device families do not support 5 V operation. Refer to the respective devicedatasheet for supported voltage selection.Voltage stress beyond acceptable limits can permanently damageMiniProg4. Programming signals can withstand over-voltage up tomaximum 12 V and minimum up to –5 V. Communication bridge signals(I2C, UART & SPI) can withstand over-voltage only up to maximum 6 Vand minimum up to –1 V.A.AppendixA.1Regulatory Compliance InformationThe CY8KCIT-005 MiniProg4 Program and Debug Kit complies with the CE-Low Voltage Directive2006/95/EC (Europe) safety requirement. It has been tested and verified to comply with the followingelectromagnetic compatibility (EMC) regulations.■CISPR 22 - Emissions■EN 55022 Class A - Immunity (Europe)■CE - EMC Directive 2004/108/EC■CE Declaration of ConformityDocument Revision HistoryDocument Title: CY8CKIT-005 MiniProg4 Program and Debug Kit Guide Document Number: 002-19782Revision ECN#Issue Date Origin ofChangeDescription of Change**628449410/31/2018NMIT New kit guide.*A637876211/08/2018SRDS Updated Installing MiniProg4chapter on page7:Updated “MiniProg4 Installation” on page8:Updated description.Updated Figure2-3.*B658102405/24/2019SRDS Updated Copyright information.。
LED屏幕的安装以及调试程序
LED屏幕的安装以及调试程序1. 引言本文档旨在提供有关LED屏幕的安装和调试程序的指导。
LED屏幕是一种常见的显示设备,用于展示图像、文字和视频等内容。
正确安装和调试是确保LED屏幕正常运行的关键步骤。
2. LED屏幕的安装步骤安装LED屏幕需要遵循以下步骤:2.1 准备工作在开始安装之前,确保已经完成以下准备工作:- 确定安装位置和屏幕尺寸要求。
- 确保安装位置有足够的支撑结构来承载屏幕的重量。
- 检查电源供应是否满足LED屏幕的要求。
2.2 安装屏幕支架根据LED屏幕的尺寸和安装位置,选择合适的支架,并按照制造商提供的指南进行安装。
确保支架牢固可靠,能够承受屏幕的重量。
2.3 连接电源和信号线将LED屏幕连接到电源和信号线。
确保连接正确并稳定,避免松动或接触不良。
2.4 安装屏幕模块根据制造商提供的指南,将LED屏幕模块按照正确的顺序和位置安装在支架上。
确保模块之间的连接牢固可靠,并且没有松动或损坏的部分。
2.5 完成安装确认LED屏幕模块安装完毕后,进行最后的检查。
确保屏幕安装牢固,没有松动的部分。
然后接通电源,检查屏幕是否正常显示。
3. LED屏幕的调试程序在安装完成后,需要进行调试程序来确保LED屏幕正常运行。
以下是LED屏幕调试程序的一般步骤:3.1 检查电源供应确保电源供应符合LED屏幕的要求,并且电源连接正确。
检查电源线是否完好无损,插头是否接触良好。
3.2 调整亮度和对比度根据实际需要,调整LED屏幕的亮度和对比度。
确保显示效果清晰明亮,并且符合预期要求。
3.3 测试显示效果通过发送测试图像或视频,测试LED屏幕的显示效果。
检查图像是否清晰,颜色是否准确,是否存在像素点故障等问题。
3.4 调整显示参数根据实际需要,调整LED屏幕的显示参数,如色彩饱和度、色温等。
确保显示效果满足客户的要求和期望。
3.5 完成调试当LED屏幕的显示效果符合预期时,调试程序即可完成。
确保所有参数设置保存,并进行最后的功能测试和验收。
kuka调试文档
分几部分调试过程中涉及到的电路原理图,见设计原理图。
接线按照电气原理图,接线即可。
上电线接好后上电RDT第一次上电,在示教盒界面上会提示“从机器人读取信息”,选择读取。
机器人的相关信息就会读到控制柜内部的工控机。
具体操作如下:登陆专家权限,“setup”->”robotdata”->,弹出状态窗口,提示“从机器人读取数据信息到硬盘”或是“从硬盘读取信息到机器人”。
选择“从机器人读取数据到硬盘”Master出厂前,厂家检验了各个轴,一般来说,我们上电后,由于最初是吊装姿态。
所以会提示2轴丢失。
从新检测校验2轴即可。
按“开机运行”菜单键,一个菜单键打开,选择“校正”选项,确定选择“千分尺”。
如下图:打开一个待校正的状态窗口:需要校正的轴按顺序显示,下一个需要校正的轴彩色背景显示。
已经校正好的轴补列出。
2轴丢失,校验2轴即可。
两项驱动配置(Devicenet和Profibus驱动配置)除原有文档相关说明,还需播地址设置波特率1-6地址组合7-8波特率组合在DeviceNET适配器上有标明的相关说明,根据需要按照说明设置即可。
KUKA与Devicenet之间的I/O配置总结1、将Devicenet模块装好,数字输入、数字输出、模拟输入、模拟输出各模块之间的顺序可以任意。
但是要注意:WAGO的Devicenet模块中,模拟量的地址在数字量之前,需要先配置模拟量。
2、配置I/O需要专家权限。
按菜单:Configure——>UserGroup按下方功能键“expert”,在状态窗口输入密码(KUKA),按回车等待进入专家界面。
3、在KUKA的KCP上按菜单:Configure——>I/ODriver——>I/ODriverReset在状态窗口上出现机器人控制器中安装的所有I/O驱动,选择devicenet,按下方功能键“Config.”,状态窗口下方出现,选择这个文件按回车打开文件,在这个文件中设置波特率(baudrate)和栈号(macid,即拨码开关号)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1.1参数调整 (2)1.2电机调试 (2)1.2.1例程 (2)1.2.2说明 (3)1.3颜色传感器调试 (3)1.3.1例程 (3)1.3.2说明 (4)1.4巡线传感器调试 (4)1.4.1例程 (4)1.4.2说明 (6)1.5舵机调试 (6)1.5.1例程 (6)1.5.2说明 (10)1.6关于机器人的使用 (10)1.1参数调整参数直接写在setup函数的开头,如:SPEED1=150;。
SPEED1:左轮速度(0-255);SPEED2:右轮速度(0-255);以上两个参数用于控制机器人巡线行进时的速度。
左右电机由于质量上的差异,同一PWM值下速度可能有些许不同,故需要分别设置。
TURN:转弯速度(0-255);BACK:刹车延时(>=0毫秒);DELAY:转弯延时(>=0毫秒)。
1.2电机调试1.2.1例程#include "Car.h"Car mycar(8,9,10,11,5,6);void setup(){mycar.Mode();mycar.Infer(1,1);}void loop(){mycar.Move(140,140,8,1000);}1.2.2说明电机调试主要是检测当机器人前进时电机的转向是否正确。
使用Car类的Infer成员函数进行检测,其中两个参数分别对应左右轮,参数值只取0和1。
通过改变参数,可改变电机转向。
例如:使用上述例程进行调试时,若左轮后退,则应将参数改为:mycar.Infer(0,1);。
1.3颜色传感器调试1.3.1例程#include "Function.h" //包含变量的定义和函数的实现#include "ColSensor.h" //颜色传感器类#include "Track.h" //巡线传感器类#include "Car.h" //小车类#include "ColQueue.h" //队列类#include "Servo.h"void setup(){mysensor.Mode();Ready();}void loop(){if (Color()){digitalWrite(13, HIGH); delay(500);digitalWrite(13, LOW); delay(500);}}1.3.2说明颜色传感器调试主要是测试颜色传感器对于颜色的检测是否正常。
例如:利用上述例程,用方块测试,若蜂鸣器鸣叫,说明已检测到方块。
注意:在使用例程时,启动前应让颜色传感器对准远处,启动后应在蜂鸣器停止鸣叫后才可测试(自动调节白平衡)。
1.4巡线传感器调试1.4.1例程#include "Function.h" //包含变量的定义和函数的实现#include "ColSensor.h" //颜色传感器类#include "Track.h" //巡线传感器类#include "Car.h" //小车类#include "ColQueue.h" //队列类#include "Servo.h"void setup(){mycar.Mode();mycar.Infer(1, 1);mytrack.Mode();Modify();}void loop(){while (num != N){Tracking(SPEED1, SPEED2); num++;In(); Out();}num = 0;Tracking(SPEED1, SPEED2);TurnR();while (num != 3){Tracking(SPEED1, SPEED2);num++;}num = 0;Tracking(SPEED1, SPEED2);TurnR();}1.4.2说明巡线传感器调试主要测试巡线是否正常。
使用上述例程前,应先做电机调试,调整电机转向,即修改mycar.Infer(1, 1);。
操作如下:打开开关,蜂鸣器声音响起,提示将寻线传感器的红外全部对准黑线;蜂鸣器声音变化时,提示将红外全部对准白色区域;蜂鸣器声音再度变化时,表示完成调节。
1.5舵机调试1.5.1例程#include "Function.h" //包含变量的定义和函数的实现#include "ColSensor.h" //颜色传感器类#include "Track.h" //巡线传感器类#include "Car.h" //小车类#include "ColQueue.h" //队列类#include "Servo.h"//夹取方块并放到小车相应垃圾桶上void Catch(int n){int a;int s11, s12, s13, s21, s22, s23, s31, s32;//此处参数需修改s11 = 70; s12 = 90; s13 = 60;s21 = 90; s22 = 110; s23 = 60;s31 = 160; s32 = 0;//1-3分别表示红蓝绿3个垃圾桶的位置switch (n){case 1:a = 180; break;case 2:a = 160; break;case 3:a = 140; break;default:return; break;}myservo1.attach(7, 544, SERVOS_MAX);myservo2.attach(12, 544, SERVOS_MAX);myservo3.attach(A0, 544, SERVOS_MAX);myservo2.write(s21); myservo1.write(s11); myservo3.write(s31);delay(300);ServoMove(s21, s22, 2); ServoMove(s31, s32, 3); ServoMove(s11, s12, 1);ServoMove(s22, s23, 2); ServoMove(s12, s13, 1); ServoMove(s23, s22, 2);ServoMove(s32, a, 3); ServoMove(s22, s21, 2); ServoMove(s13, s11, 1);ServoMove(s21, s22, 2); ServoMove(a, s31, 3); ServoMove(s22, s21, 2);myservo1.detach(); myservo2.detach(); myservo3.detach();Plus();}//夹取小车上的垃圾并放到相应的垃圾场void Down(int n){int a = 0;int s11, s12, s13, s21, s22, s23, s31, s32;//此处参数需修改s11 = 70; s12 = s11; s13 = 60;s21 = 90; s22 = 110; s23 = s22;s31 = 180; s32 = s31 - 90;//1-3分别表示红蓝绿3个垃圾桶的位置switch (n){case 1:a = 180; break;case 2:a = 160; break;case 3:a = 140; break;default:return; break;}myservo1.attach(7, 544, SERVOS_MAX);myservo2.attach(12, 544, SERVOS_MAX);myservo3.attach(A0, 544, SERVOS_MAX);myservo2.write(s21); myservo1.write(s11); myservo3.write(s31);delay(300);ServoMove(s21, s22, 2); ServoMove(s31, a, 3); ServoMove(s22, s21, 2);ServoMove(s11, s13, 1); ServoMove(s21, s22, 2); ServoMove(a, s32, 3);ServoMove(s22, s23, 2); ServoMove(s13, s11, 1); ServoMove(s23, s22, 2);ServoMove(s32, s31, 3); ServoMove(s22, s21, 2);myservo1.detach(); myservo2.detach(); myservo3.detach();}void setup(){myservo1.attach(7, 544, SERVOS_MAX);myservo2.attach(12, 544, SERVOS_MAX);myservo3.attach(A0, 544, SERVOS_MAX);}void loop(){//myservo1.write(0);//myservo2.write(90);//myservo3.write(135);//依次调试各个舵机Catch(1);}1.5.2说明舵机调试主要是调整舵机夹取方块和卸下方块时各个关键位置的角度。
上述例程将J1~J3的输出角度分别设为0°,90°,135°。
使用如下:将1号舵机分别接板上的J1,J2,J3,观察各个角度的位置,再估算s11~s13的值(参数含义具体见库函数介绍.doc),并在Catch 函数中修改。
以此类推,再估算2号和3号舵机的角度值(包括3个垃圾桶的位置)。
3个舵机的角度估算完成之后,可注释掉loop函数的3个write函数,并在loop函数中调用Catch 函数以查看结果,根据结果再调整角度。
调好Catch函数后,再把Catch函数中的s11,s13,s21,s22,s31以及3个垃圾桶位置的值复制到Down函数的相应位置。
这样就完成了对舵机的调试。
若舵机无法转到相应角度,应卸下重装。
建议在组装机械臂前先用程序将舵机调到合适角度,再进行组装。
1.6关于机器人的使用使用我们提供的程序运行机器人时,请确保程序已经过调试(主要为电机调试和舵机调试)。
使用步骤如下:打开开关,先测黑线,再测白线,最后测白平衡。
测黑线时注意让红外全部对准黑线,不要偏到白色区。
测白平衡时让颜色传感器对准远处即可。
这三步骤可根据蜂鸣器的声音提示进行。