单片机设计实例
MSP430单片机及设计实例

基于MSP430单片机的医疗设备控制系统
总结词
高可靠性、实时性、安全性
详细描述
MSP430单片机在医疗设备控制系统中具有高可靠性和实时性,能够满足医疗设备对安全性的高要求 。通过与各类传感器和执行器配合,实现对医疗设备的精确控制,如输液泵、监护仪等。系统可提高 医疗设备的自动化水平,减轻医护人员的工作负担。
通过PWM信号控制电机驱动器,实现电机的调速和方向控制。
速度与位置控制
通过编码器检测电机的实际速度和位置,实现闭环控制。
基于MSP430单片机的无线通信系统设计
无线通信模块选择
选择合适的无线通信模块,如Wi-Fi、蓝牙、Zigbee等。
MCU与无线通信模块接口
通过串口或SPI接口实现数据传输和控制。
数据传输与接收
实现数据的发送和接收,并进行必要的处理和显示。
05
MSP430单片机应用实例
基于MSP430单片机的智能家居控制系统
总结词
低功耗、高效能、易于扩展
详细描述
MSP430单片机以其低功耗和高性能在智能家居控制系统中得到广泛应用。通过与传感器、执行器等外围设备连 接,实现对家居环境的智能监控和控制,如温度、湿度、光照等。系统可扩展性强,可接入各种智能设备,为用 户提供便捷的生活体验。
基于MSP430单片机的工业自动化控制系统
总结词
抗干扰能力强、适应性强、易于维护
详细描述
MSP430单片机在工业自动化控制系统中表现出抗干扰能力强、适应性强和易于维护等 优点。广泛应用于各种工业控制领域,如电机控制、过程控制等。系统可提高生产效率,
降低能耗,为企业带来经济效益。
THANKS
感谢观看
MSP430单片机的编程语言
第6章 单片机应用系统设计实例

定时器中断子 程序流程图
主要程序举例 正弦波离散输出表:
uchar code sine_tab[256]={ //输出电压从0到最大值(正弦波1/4部分) 0x80,0x83,0x86,0x89,0x8d,0x90,0x93,0x96,0x99,0x9c, 0x9f,0xa2,0xa5,0xa8,0xab,0xae,0xb1,0xb4,0xb7,0xba,0xbc, 0xbf,0xc2,0xc5,0xc7,0xca,0xcc,0xcf,0xd1,0xd4,0xd6,0x d8,0xda,0xdd,0xdf,0xe1,0xe3,0xe5,0xe7,0xe9,0xea,0xec, 0xee,0xef,0xf1,0xf2,0xf4,0xf5,0xf6,0xf7,0xf8,0xf9,0xfa,0 xfb,0xfc,0xfd,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff, //输出电压从最大值到0(正弦波1/4部分) 0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfd,0xfc,0xfb,0xfa,0 xf9,0xf8,0xf7,0xf6,0xf5,0xf4,0xf2,0xf1,0xef,
第六章 单片机应用系统设计实例
6.1 6.2 6.3 6.4 6.5 8051系列单片机实现计算器功能 简易波形发生器 简易广告屏设计 寻迹小车的设计 无线呼叫系统设计
6.1 8051单片机实现计算器功能
一 设计目标和实现方法
满足计算器要求,进行加减乘除运算; 打开计数器时,初始显示数字为0123; 实现简单的数据运算,不支持连续运算; 仿真和调试要用到Protues 和Keil 软件。
四 软件设计
模块化程序设计是单片机应用中最常用的 程序设计方法; 模块化程序设计的中心思想是把一个复杂 应用程序按整体功能划分成若干相对独立 的程序模块,各模块可以单独 设计,编程和 调试,然后组合起来; 本系统的程序模块主要分为主程序,键值 获取程序和处理子程序等,其流程图分别 如下图所示:
单片机编程100例
单片机编程实例100例大全单片机编程实例*实例1:使用P3口流水点亮8位LED#include<reg51.h> //包含单片机寄存器的头文件 / 函数功能:延时一段时间void delay(void){unsigned char i,j;for(i=0;i<250;i++)for(j=0;j<250;j++);}/ 函数功能:主函数void main(void){while(1){P3=0xfe; //第一个灯亮delay(); //调用延时函数P3=0xfd; //第二个灯亮delay(); //调用延时函数P3=0xfb; //第三个灯亮delay(); //调用延时函数P3=0xf7; //第四个灯亮delay(); //调用延时函数P3=0xef; //第五个灯亮delay(); //调用延时函数P3=0xdf; //第六个灯亮delay(); //调用延时函数P3=0xbf; //第七个灯亮delay(); //调用延时函数P3=0x7f; //第八个灯亮delay(); //调用延时函数} / /}*实例2:通过对P3口地址的操作流水点亮8位LED#include<reg51.h> //包含单片机寄存器的头文件sfr x=0xb0; //P3口在存储器中的地址是b0H,通过sfr可定义8051内核单片机//的所有内部8位特殊功能寄存器,对地址x的操作也就是对P1口的操作/函数功能:延时一段时间/. void delay(void){unsigned char i,j;for(i=0;i<250;i++)for(j=0;j<250;j++); //利用循环等待若干机器周期,从而延时一段时间}/函数功能:主函数/void main(void){while(1){x=0xfe; //第一个灯亮delay(); //调用延时函数x=0xfd; //第二个灯亮delay(); //调用延时函数x=0xfb; //第三个灯亮delay(); //调用延时函数x=0xf7; //第四个灯亮delay(); //调用延时函数. x=0xef; //第五个灯亮delay(); //调用延时函数x=0xdf; //第六个灯亮delay(); //调用延时函数x=0xbf; //第七个灯亮delay(); //调用延时函数x=0x7f; //第八个灯亮delay(); //调用延时函数}}*实例3:用不同数据类型控制灯闪烁时间#include<reg51.h> //包含单片机寄存器的头文件/函数功能:用整形数据延时一段时间/void int_delay(void) //延时一段较长的时间{unsigned int m; //定义无符号整形变量,双字节数据,值域为0~65535 for(m=0;m<36000;m++); //空操作}/函数功能:用字符型数据延时一段时间/void char_delay(void) //延时一段较短的时间{unsigned char i,j; //定义无符号字符型变量,单字节数据,值域0~255 for(i=0;i<200;i++)for(j=0;j<180;j++); //空操作}/函数功能:主函数/void main(void){unsigned char i;while(1){for(i=0;i<3;i++){P1=0xfe; //P1.0口的灯点亮int_delay(); //延时一段较长的时间P1=0xff; //熄灭int_delay(); //延时一段较长的时间}for(i=0;i<3;i++){P1=0xef; //P1.4口的灯点亮char_delay(); //延时一段较长的时间} P1=0xff; //熄灭 char_delay(); //延时一段较长的时间 } } *实例4:用单片机控制第一个灯亮#include<reg51.h> //包含51单片机寄存器定义的头文件void main(void){P1=0xfe; //P1=1111 1110B,即P1.0输出低电平}*实例5:用单片机控制一个灯闪烁:认识单片机的工作频率#include<reg51.h> //包含单片机寄存器的头文件/函数功能:延时一段时间/void delay(void) //两个void意思分别为无需返回值,没有参数传递 {unsigned int i; //定义无符号整数,最大取值范围65535for(i=0;i<20000;i++) //做20000次空循环; //什么也不做,等待一个机器周期}/ 函数功能:主函数(C语言规定必须有也只能有1个主函数) / void main(void){while(1) //无限循环{P1=0xfe; //P1=1111 1110B, P1.0输出低电平delay(); //延时一段时间P1=0xff; //P1=1111 1111B, P1.0输出高电平delay(); //延时一段时间}}*实例6:将 P1口状态分别送入P0、P2、P3口:认识I/O口的引脚功能#include<reg51.h> //包含单片机寄存器的头文件/ 函数功能:主函数(C语言规定必须有也只能有1个主函数) / void main(void){while(1) //无限循环{P1=0xff; // P1=1111 1111B,熄灭LEDP0=P1; // 将 P1口状态送入P0口P2=P1; // 将 P1口状态送入P2口P3=P1; // 将 P1口状态送入P3口}}*实例7:用P0口、P1 口分别显示加法和减法运算结果#include<reg51.h>void main(void){unsigned char m,n;m=43; //即十进制数2x16+11=43n=60; //即十进制数3x16+12=60P1=m+n; //P1=103=0110 0111B,结果P1.3、P1.4、P1.7 口的灯被点亮 P0=n-m; //P0=17=0001 0001B,结果P0.0、P0.4的灯被熄灭 } *实例8:用P0、P1口显示乘法运算结果#include<reg51.h> //包含单片机寄存器的头文件void main(void){unsigned char m,n;unsigned int s;m=64;n=71;s=m n; //s=64 71=4544,需要16位二进制数表示,高8位送P1口,低8位送P0口//由于4544=17 256+192=H3 16 16 16+H2 16 16+H1 16+H0//两边同除以256,可得17+192/256=H3 16+H2+(H1 16+H0)/256 //因此,高8位16进制数H3 16+H2必然等于17,即4544除以256的商//低8位16进制数H1 16+H0必然等于192,即4544除以256的余数P1=s/256; //高8位送P1口,P1=17=11H=0001 0001B, P1.0和P1.4口灭,其余亮P0=s%256; //低8位送P0口 , P3=192=c0H=11000000B,P3.1,P3.6,P3.7口灭,其余亮}*实例9:用P1、P0口显示除法运算结果#include<reg51.h> //包含单片机寄存器的头文件void main(void){P1=36/5; //求整数P0=((36%5) 10)/5; //求小数while(1); //无限循环防止程序“跑飞”}*实例10:用自增运算控制P0口8位LED流水花样#include<reg51.h> //包含单片机寄存器的头文件/函数功能:延时一段时间/void delay(void){unsigned int i;for(i=0;i<20000;i++);}/ 函数功能?:主函数/ void main(void){unsigned char i;for(i=0;i<255;i++) //注意i的值不能超过255 {P0=i; //将i的值送P0口delay(); //调用延时函数}}*实例11:用P0口显示逻辑"与"运算结果 #include<reg51.h> //包含单片机寄存器的头文件 void main(void){P0=(4>0)&&(9>0xab);//将逻辑运算结果送P0口while(1); //设置无限循环,防止程序“跑飞”}*实例12:用P0口显示条件运算结果#include<reg51.h> //包含单片机寄存器的头文件 voidmain(void){P0=(8>4)?8:4;//将条件运算结果送P0口,P0=8=0000 1000B while(1); //设置无限循环,防止程序“跑飞”}*实例13:用P0口显示按位"异或"运算结果 #include<reg51.h> //包含单片机寄存器的头文件 void main(void){P0=0xa2^0x3c;//将条件运算结果送P0口,P0=8=0000 1000B while(1); //设置无限循环,防止程序“跑飞”}*实例16:用P0显示左移运算结果#include<reg51.h> //包含单片机寄存器的头文件 voidmain(void){P0=0x3b<<2;//将左移运算结果送P0口,P0=1110 1100B=0xec while(1); //无限循环,防止程序“跑飞”}*实例17:"万能逻辑电路"实验#include<reg51.h> //包含单片机寄存器的头文件sbit F=P1^4; //将F位定义为 P1.4sbit X=P1^5; //将X位定义为 P1.5sbit Y=P1^6; //将Y位定义为 P1.6sbit Z=P1^7; //将Z位定义为 P1.7void main(void){while(1){F=((~X)&Y)|Z; //将逻辑运算结果赋给F;}}*实例18:用右移运算流水点亮P1口8位LED #include<reg51.h> //包含单片机寄存器的头文件/函数功能:延时一段时间/void delay(void){unsigned int n;for(n=0;n<30000;n++);}/函数功能:主函数/void main(void){unsigned char i;while(1){P1=0xff;delay();for(i=0;i<8;i++)//设置循环次数为8P1=P1>>1; //每次循环P1的各二进位右移1位,高位补0 delay(); //调用延时函数}}}*实例19:用if语句控制P0口8位LED的流水方向#include<reg51.h> //包含单片机寄存器的头文件sbit S1=P1^4; //将S1位定义为P1.4sbit S2=P1^5; //将S2位定义为P1.5/函数功能:主函数/void main(void){while(1)}{ if(S1==0) //如果按键S1按下 P0=0x0f; //P0口高四位LED点亮if(S2==0) //如果按键S2按下 P0=0xf0; //P0口低四位LED点亮 } *实例20:用swtich语句的控制P0口8位LED的点亮状态#include<reg51.h> //包含单片机寄存器的头文件sbit S1=P1^4; //将S1位定义为P1.4函数功能:延时一段时间/void delay(void){unsigned int n;for(n=0;n<10000;n++);}/函数功能:主函数/void main(void){unsigned char i;i=0; //将i初始化为0while(1){if(S1==0) //如果S1键按下{delay(); //延时一段时间if(S1==0) //如果再次检测到S1键按下i++; //i自增1if(i==9) //如果i=9,重新将其置为1i=1;}switch(i) //使用多分支选择语句{}} case 1: P0=0xfe; //第一个LED亮 break; case 2: P0=0xfd; //第二个LED亮 break; case 3:P0=0xfb; //第三个LED亮 break; case 4:P0=0xf7; //第四个LED亮 break; case 5:P0=0xef; //第五个LED亮 break; case 6:P0=0xdf; //第六个LED亮 break; case 7:P0=0xbf; //第七个LED亮 break; case 8:P0=0x7f; //第八个LED 亮 break; default: //缺省值,关闭所有LED P0=0xff; }*实例21:用for语句控制蜂鸣器鸣笛次数#include<reg51.h> //包含单片机寄存器的头文件 sbitsound=P3^7; //将sound位定义为P3.7 / 函数功能:延时形成1600Hz音频/ void delay1600(void){unsigned char n;for(n=0;n<100;n++);}/ 函数功能:延时形成800Hz音频/ void delay800(void){unsigned char n;for(n=0;n<200;n++);}/ 函数功能:主函数/ void main(void){unsigned int i;while(1){for(i=0;i<830;i++){sound=0; //P3.7输出低电平 delay1600(); sound=1; //P3.7输出高电平 delay1600(); }for(i=0;i<200;i++){sound=0; //P3.7输出低电平 delay800();. sound=1; //P3.7输出高电平 delay800();}}}*实例22:用while语句控制LED#include<reg51.h> //包含单片机寄存器的头文件 / 函数功能:延时约60ms (3 100 200=60000μs) / void delay60ms(void){unsigned char m,n;for(m=0;m<100;m++)for(n=0;n<200;n++);}/函数功能:主函数/void main(void){unsigned char i;while(1) //无限循环{i=0; //将i初始化为0while(i<0xff) //当i小于0xff(255)时执行循环体 { P0=i; //将i送P0口显示delay60ms(); //延时i++; //i自增1}}}*实例23:用do-while语句控制P0口8位LED流水点亮#include<reg51.h> //包含单片机寄存器的头文件/函数功能:延时约60ms (3 100 200=60000μs)/void delay60ms(void){unsigned char m,n;for(m=0;m<100;m++)for(n=0;n<200;n++);}/函数功能:主函数/void main(void){do{P0=0xfe; //第一个LED亮delay60ms();}P0=0xfd; //第二个LED亮 delay60ms(); P0=0xfb; //第三个LED亮 delay60ms(); P0=0xf7; //第四个LED亮 delay60ms(); P0=0xef; //第五个LED亮 delay60ms(); P0=0xdf; //第六个LED亮delay60ms(); delay60ms(); P0=0xbf; //第七个LED亮delay60ms(); P0=0x7f; //第八个LED亮 delay60ms(); }while(1); //无限循环,使8位LED循环流水点亮*实例24:用字符型数组控制P0口8位LED流水点亮#include<reg51.h> //包含单片机寄存器的头文件/函数功能:延时约60ms (3 100 200=60000μs)/void delay60ms(void){unsigned char m,n;for(m=0;m<100;m++)for(n=0;n<200;n++);}/函数功能:主函数/void main(void){unsigned char i;unsigned char codeTab[ ]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; //定义无符号字符型数组while(1){for(i=0;i<8;i++){P0=Tab[i];//依次引用数组元素,并将其送P0口显示delay60ms();//调用延时函数}}}*实例25:用P0口显示字符串常量#include<reg51.h> //包含单片机寄存器的头文件/函数功能:延时约150ms (3 200 250=150 000μs=150ms/void delay150ms(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/函数功能:主函数/void main(void){unsigned char str[]={"Now,Temperature is :"}; //将字符串赋给字符型全部元素赋值unsigned char i;while(1){i=0; //将i初始化为0,从第一个元素开始显示while(str[i]!='\0') //只要没有显示到结束标志'\0'{P0=str[i]; //将第i个字符送到P0口显示delay150ms(); //调用150ms延时函数i++; //指向下一个待显字符}}}*实例26:用P0 口显示指针运算结果#include<reg51.h>void main(void){unsigned char p1, p2; //定义无符号字符型指针变量p1,p2 unsigned char i,j; //定义无符号字符型数据i=25; //给i赋初值25j=15;p1=&i; //使指针变量指向i ,对指针初始化p2=&j; //使指针变量指向j ,对指针初始化P0= p1+ p2; // p1+ p2相当于i+j,所以P0=25+15=40=0x28//则P0=0010 1000B,结果P0.3、P0.5引脚LED熄灭,其余点亮while(1); //无限循环,防止程序“跑飞”}*实例27:用指针数组控制P0口8位LED流水点亮#include<reg51.h>/函数功能:延时约150ms (3 200 250=150 000μs=150ms /void delay150ms(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/函数功能:主函数/void main(void){unsigned char codeTab[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};unsigned charp[ ]={&Tab[0],&Tab[1],&Tab[2],&Tab[3],&Tab[4],&Tab[5], &Tab[6],&Tab[7]};unsigned char i; //定义无符号字符型数据while(1){for(i=0;i<8;i++){P0= p[i];delay150ms();}}}*实例28:用数组的指针控制P0 口8 位LED流水点亮#include<reg51.h>/函数功能:延时约150ms (3 200 250=150 000μs=150ms/void delay150ms(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/函数功能:主函数/void main(void){unsigned char i;unsigned charTab[ ]={0xFF,0xFE,0xFD,0xFB,0xF7,0xEF,0xDF,0xBF,0x7F,0xBF,0xDF,0xEF,0xF7,0xFB,0xFD,0xFE,0xFE,0xFC,0xFB,0xF0,0xE0,0xC0,0x80,0x00,0xE7,0xDB,0xBD,0x7E,0x3C,0x18,0x00,0x81,0xC3,0xE7,0x7E,0xBD,0xDB,0xE7,0xBD,0xDB}; //流水灯控制码unsigned char p; //定义无符号字符型指针p=Tab; //将数组首地址存入指针pwhile(1){for(i=0;i<32;i++) //共32个流水灯控制码{P0= (p+i); // (p+i)的值等于a[i]}delay150ms(); //调用150ms延时函数 } }*实例29:用P0 、P1口显示整型函数返回值 #include<reg51.h> / 函数功能:计算两个无符号整数的和/ unsigned int sum(int a,int b){unsigned int s;s=a+b;return (s);}/ 函数功能:主函数/ void main(void){unsigned z;z=sum(2008,2009);P1=z/256; //取得z的高8位P0=z%256; //取得z的低8位while(1);}*实例30:用有参函数控制P0口8位LED流水速度#include<reg51.h>/ 函数功能:延时一段时间/ void delay(unsigned char x){unsigned char m,n;for(m=0;m<x;m++)for(n=0;n<200;n++);}/函数功能:主函数/void main(void){unsigned char i;unsigned char codeTab[ ]={0xFE,0xFD,0xFB,0xF7,0xEF,0xDF,0xBF,0x7F}; //流水灯控制码while(1){//快速流水点亮LEDfor(i=0;i<8;i++) //共8个流水灯控制码{P0=Tab[i];delay(100); //延时约60ms, (3 100 200=60 000μs) } //慢速流水点亮LEDfor(i=0;i<8;i++) //共8个流水灯控制码{P0=Tab[i];delay(250); //延时约150ms, (3 250 200=150 000μs) } }}*实例31:用数组作函数参数控制流水花样#include<reg51.h>/函数功能:延时约150ms/void delay(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/函数功能:流水点亮P0口8位LED/void led_flow(unsigned char a[8]){unsigned char i;for(i=0;i<8;i++){P0=a[i];delay();}}/函数功能:主函数/void main(void){unsigned char codeTab[ ]={0xFE,0xFD,0xFB,0xF7,0xEF,0xDF,0xBF,0x7F}; //流水灯控制码led_flow(Tab);}*实例32:用指针作函数参数控制P0口8位LED流水点亮#include<reg51.h>/函数功能:延时约150ms/void delay(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/函数功能:流水点亮P0口8位LED/void led_flow(unsigned char p) //形参为无符号字符型指针{unsigned char i;while(1){i=0; //将i置为0,指向数组第一个元素while( (p+i)!='\0') //只要没有指向数组的结束标志P0= (p+i);// 取的指针所指变量(数组元素)的值,送P0口 delay(); //调用延时函数i++; //指向下一个数组元素}}}/函数功能:主函数/void main(void){unsigned char codeTab[ ]={0xFE,0xFD,0xFB,0xF7,0xEF,0xDF,0xBF,0x7F,0x7F,0xBF,0xDF,0xEF,0xF7,0xFB,0xFD,0xFE,0xFF,0xFE,0xFC,0xFB,0xF0,0xE0,0xC0,0x80,0x00,0xE7,0xDB,0xBD,0x7E,0xFF,0xFF,0x3C,0x18,0x0,0x81,0xC3,0xE7,0xFF, 0xFF,0x7E};//流水灯控制码unsigned char pointer;pointer=Tab;led_flow(pointer);*实例33:用函数型指针控制P1口灯花样#include<reg51.h> //包含51单片机寄存器定义的头文件unsigned char codeTab[]={0xFE,0xFD,0xFB,0xF7,0xEF,0xDF,0xBF,0x7F}; //流水灯控制码,该数组被定义为全局变量/函数功能:延时约150ms/ void delay(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/ 函数功能:流水灯左移/ void led_flow(void){unsigned char i;for(i=0;i<8;i++) //8位控制码{P0=Tab[i];delay();}}/ 函数功能:主函数/ void main(void){void ( p)(void); //定义函数型指针,所指函数无参数,无返回值p=led_flow; //将函数的入口地址赋给函数型指针pwhile(1)( p)(); //通过函数的指针p调用函数led_flow()}*实例34:用指针数组作为函数的参数显示多个字符串#include<reg51.h> //包含51单片机寄存器定义的头文件unsigned char code str1[ ]="Temperature is tested byDS18B20";//C语言中,字符串是作为字符数组来处理的unsigned char code str2[ ]="Now temperature is:"; //所以,字符串的名字就是字符串的首地址unsigned char code str3[ ]="The Systerm is designed by Zhang San";unsigned char code str4[ ]="The date is 2008-9-30"; unsigned char p[ ]={str1,str2,str3,str4}; //定义p[4]为指向4个字符串的字符型指针数组/ 函数功能:延时约150ms/ void delay(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/ 函数功能:流水点亮P0口8位LED/ void led_display(unsigned char x[ ]) //形参必须为指针数组{unsigned char i,j;for(i=0;i<4;i++) //有4个字符串要显示{j=0; //指向待显字符串的第0号元素while( (x[i]+j)!='\0') //只要第i个字符串的第j号元素不是结束标志 {P0= (x[i]+j); //取得该元素值送到P0口显示delay(); //调用延时函数j++; //指向下一个元素}}}/ 函数功能:主函数/ void main(void){unsigned char i;while(1){for(i=0;i<4;i++)led_display(p); //将指针数组名作实际参数传递}}*实例35:字符函数ctype.h应用举例#include<reg51.h> //包含51单片机寄存器定义的头文件#include<ctype.h>void main(void){while(1){P3=isalpha('_')?0xf0:0x0f;//条件运算,若'_'是英文字母,P3=0xf0 }}*实例36:内部函数intrins.h应用举例#include<intrins.h> //包含函数isalpha()声明的头文件 / 函数功能:延时约150ms/ void delay(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/ 函数功能:主函数/ void main(void){P3=0xfe; //P3=1111 1110Bwhile(1){P3=_crol_(P3,1);// 将P3的二进制位循环左移1位后再赋给P3 delay(); //调用延时函数}}*实例37:标准函数stdlib.h应用举例#include<stdlib.h> //包含函数isalpha()声明的头文件 / 函数功能:延时约150ms/ void delay(void){unsigned char m,n;for(m=0;m<200;m++)for(n=0;n<250;n++);}/ 函数功能:主函数/ void main(void){unsigned char i;while(1){for(i=0;i<10;i++) //产生10个随机数{P3=rand()/160; //将产生的随机数缩小160倍后送P3显示delay();}}}*实例38:字符串函数string.h应用举例#include<reg51.h> //包含51单片机寄存器定义的头文件#include<string.h> //包含函数isalpha()声明的头文件 void main(void){unsigned char str1[ ]="Now, The temperature is :"; unsigned char str2[ ]="Now, The temperature is 36 Centgrade:"; unsigned char i;i=strcmp(str1,str2); //比较两个字符串,并将结果存入iif(i==0) //str1=str2P3=0x00;elseif(i<0) //str1<str2P3=0xf0;else //str1>str2P3=0x0f;while(1); //防止程序“跑飞”}*实例39:宏定义应用举例2#include<reg51.h> //包含51单片机寄存器定义的头文件# define F(a,b) (a)+(a) (b)/256+(b) //带参数的宏定义,a和b 为形参 void main(void){unsigned char i,j,k;i=40;j=30;k=20;P3=F(i,j+k); //i和j+k分别为实参,宏展开时,实参将替代宏定义中的形参while(1);}*实例40:宏定义应用举例2#include<AT89X51.h>#include<ctype.h>void main(void){P3_0=0; //将P3.0引脚置低电平,LED点亮P3_1=0; //将P3.0引脚置低电平,LED点亮P3_2=0; //将P3.0引脚置低电平,LED点亮P3_3=0; //将P3.0引脚置低电平,LED点亮P3_4=1; //将P3.4引脚置高电平,LED熄灭P3_5=1; //将P3.5引脚置高电平,LED熄灭 P3_6=1; //将P3.7引脚置高电平,LED熄灭 P3_7=1; //将P3.7引脚置高电平,LED熄灭while(1) ;*实例41:宏定义应用举例3#include<reg51.h> //包含51单片机寄存器定义的头文件#define MAX 100 //将MAX宏定义为字符串100void main(void){#if MAX>80 //如果字符串100大于80P3=0xf0; //P3口低四位LED点亮#elseP3=0x0f; //否则,P3口高四位LED点亮#endif //结束本次编译}/ 中断、定时器中断、定时器中断、定时器中断、定时器 /*实例42:用定时器T0查询方式P2口8位控制LED闪烁#include<reg51.h> // 包含51单片机寄存器定义的头文件/函数功能:主函数/ void main(void)// EA=1; //开总中断// ET0=1; //定时器T0中断允许 TMOD=0x01; //使用定时器T0的模式1TH0=(65536-46083)/256; //定时器T0的高8位赋初值TL0=(65536-46083)%256; //定时器T0的高8位赋初值TR0=1; //启动定时器T0TF0=0;P2=0xff;while(1)//无限循环等待查询{while(TF0==0);TF0=0;P2=~P2;TH0=(65536-46083)/256; //定时器T0的高8位赋初值TL0=(65536-46083)%256; //定时器T0的高8位赋初值 }}*实例43:用定时器T1查询方式控制单片机发出1KHz音频#include<reg51.h> // 包含51单片机寄存器定义的头文件 sbit sound=P3^7; //将sound位定义为P3.7引脚/ 函数功能:主函数{// EA=1; //开总中断// ET0=1; //定时器T0中断允许 TMOD=0x10; //使用定时器T1的模式1TH1=(65536-921)/256; //定时器T1的高8位赋初值TL1=(65536-921)%256; //定时器T1的高8位赋初值TR1=1; //启动定时器T1TF1=0;while(1)//无限循环等待查询{while(TF1==0);TF1=0;sound=~sound; //将P3.7引脚输出电平取反TH1=(65536-921)/256; //定时器T0的高8位赋初值TL1=(65536-921)%256; //定时器T0的高8位赋初值 }}*实例44:将计数器T0计数的结果送P1口8位LED显示#include<reg51.h> // 包含51单片机寄存器定义的头文件 sbit S=P3^4; //将S位定义为P3.4引脚/ 函数功能:主函数{// EA=1; //开总中断// ET0=1; //定时器T0中断允许 TMOD=0x02; //使用定时器T0的模式2TH0=256-156; //定时器T0的高8位赋初值TL0=256-156; //定时器T0的高8位赋初值TR0=1; //启动定时器T0while(1)//无限循环等待查询{while(TF0==0) //如果未计满就等待{if(S==0) //按键S按下接地,电平为0P1=TL0; //计数器TL0加1后送P1口显示}TF0=0; //计数器溢出后,将TF0清0}}*实例45:用定时器T0的中断控制1位LED闪烁 #include<reg51.h> // 包含51单片机寄存器定义的头文件sbit D1=P2^0; //将D1位定义为P2.0引脚/ 函数功能:主函数{EA=1; //开总中断ET0=1; //定时器T0中断允许TMOD=0x01; //使用定时器T0的模式2TH0=(65536-46083)/256; //定时器T0的高8位赋初值TL0=(65536-46083)%256; //定时器T0的高8位赋初值TR0=1; //启动定时器T0while(1)//无限循环等待中断;}/ 函数功能:定时器T0的中断服务程序/ void Time0(void) interrupt 1 using 0 //“interrupt”声明函数为中断服务函数 //其后的1为定时器T0的中断编号;0表示使用第0组工作寄存器{D1=~D1; //按位取反操作,将P2.0引脚输出电平取反TH0=(65536-46083)/256; //定时器T0的高8位重新赋初值TL0=(65536-46083)%256; //定时器T0的高8位重新赋初值}*实例46:用定时器T0的中断实现长时间定时#include<reg51.h> // 包含51单片机寄存器定义的头文件sbit D1=P2^0; //将D1位定义为P2.0引脚unsigned char Countor; //设置全局变量,储存定时器T0中断次数/ 函数功能:主函数/ void main(void){EA=1; //开总中断ET0=1; //定时器T0中断允许TMOD=0x01; //使用定时器T0的模式2TH0=(65536-46083)/256; //定时器T0的高8位赋初值TL0=(65536-46083)%256; //定时器T0的高8位赋初值TR0=1; //启动定时器T0Countor=0; //从0开始累计中断次数while(1)//无限循环等待中断;}/ 函数功能:定时器T0的中断服务程序/ void Time0(void) interrupt 1 using 0 //“interrupt”声明函数为中断服务函数//其后的1为定时器T0的中断编号;0表示使用第0组工作寄存器{Countor++; //中断次数自加1if(Countor==20) //若累计满20次,即计时满1s{D1=~D1; //按位取反操作,将P2.0引脚输出电平取反Countor=0; //将Countor清0,重新从0开始计数}TH0=(65536-46083)/256; //定时器T0的高8位重新赋初值TL0=(65536-46083)%256; //定时器T0的高8位重新赋初值}*实例47:用定时器T1中断控制两个LED以不同周期闪烁#include<reg51.h> // 包含51单片机寄存器定义的头文件sbit D1=P2^0; //将D1位定义为P2.0引脚sbit D2=P2^1; //将D2位定义为P2.1引脚unsigned char Countor1; //设置全局变量,储存定时器T1中断次数unsigned char Countor2; //设置全局变量,储存定时器T1中断次数/ 函数功能:主函数/ void main(void){EA=1; //开总中断ET1=1; //定时器T1中断允许TMOD=0x10; //使用定时器T1的模式1TH1=(65536-46083)/256; //定时器T1的高8位赋初值TL1=(65536-46083)%256; //定时器T1的高8位赋初值TR1=1; //启动定时器T1Countor1=0; //从0开始累计中断次数Countor2=0; //从0开始累计中断次数while(1)//无限循环等待中断;}/ 函数功能:定时器T1的中断服务程序/ void Time1(void) interrupt 3 using 0 //“interrupt”声明函数为中断服务函数 //其后的3为定时器T1的中断编号;0表示使用第0组工作寄存器{Countor1++; //Countor1自加1Countor2++; //Countor2自加1if(Countor1==2) //若累计满2次,即计时满100ms{D1=~D1; //按位取反操作,将P2.0引脚输出电平取反 Countor1=0; //将Countor1清0,重新从0开始计数}if(Countor2==8) //若累计满8次,即计时满400ms{D2=~D2; //按位取反操作,将P2.1引脚输出电平取反 Countor2=0; //将Countor1清0,重新从0开始计数}TH1=(65536-46083)/256; //定时器T1的高8位重新赋初值TL1=(65536-46083)%256; //定时器T1的高8位重新赋初值}*实例48:用计数器T1的中断控制蜂鸣器发出1KHz音频#include<reg51.h> // 包含51单片机寄存器定义的头文件sbit sound=P3^7; //将sound位定义为P3.7引脚/ 函数功能:主函数/ void main(void){EA=1; //开总中断ET1=1; //定时器T1中断允许TMOD=0x10; //TMOD=0001 000B,使用定时器T1的模式1TH1=(65536-921)/256; //定时器T1的高8位赋初值TL1=(65536-921)%256; //定时器T1的高8位赋初值TR1=1; //启动定时器T1while(1)//无限循环等待中断;}/ 函数功能:定时器T1的中断服务程序/ void Time1(void) interrupt 3 using 0 //“interrupt”声明函数为中断服务函数 {sound=~sound;TH1=(65536-921)/256; //定时器T1的高8位重新赋初值TL1=(65536-921)%256; //定时器T1的高8位重新赋初值}*实例49:用定时器T0的中断实现"渴望"主题曲的播放#include<reg51.h> //包含51单片机寄存器定义的头文件sbit sound=P3^7; //将sound位定义为P3.7unsigned int C; //储存定时器的定时常数//以下是C调低音的音频宏定义#define l_dao 262 //将“l_dao”宏定义为低音“1”的频率262Hz #define l_re 286 //将“l_re”宏定义为低音“2”的频率286Hz #define l_mi 311 //将“l_mi”宏定义为低音“3”的频率311Hz #define l_fa 349 //将“l_fa”宏定义为低音“4”的频率349Hz #define l_sao 392 //将“l_sao”宏定义为低音“5”的频率392Hz #define l_la 440 //将“l_a”宏定义为低音“6”的频率440Hz#define l_xi 494 //将“l_xi”宏定义为低音“7”的频率494Hz //以下是C调中音的音频宏定义#define dao 523 //将“dao”宏定义为中音“1”的频率523Hz#define re 587 //将“re”宏定义为中音“2”的频率587Hz#define mi 659 //将“mi”宏定义为中音“3”的频率659Hz。
单片机C语言程序设计实训100例new
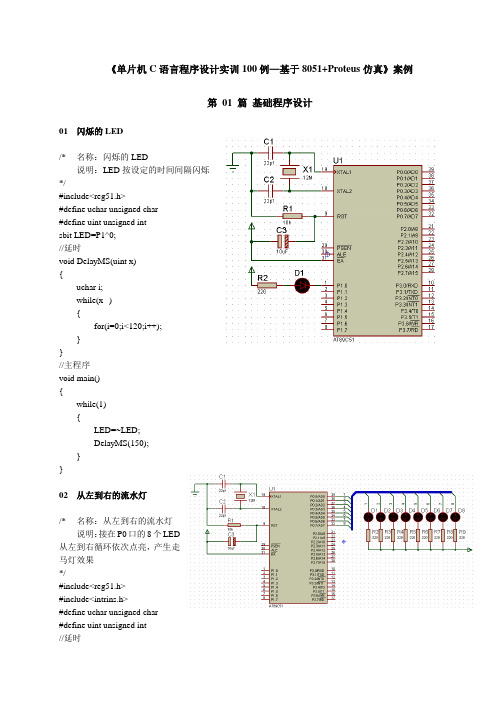
《单片机C语言程序设计实训100例—基于8051+Proteus仿真》案例第01 篇基础程序设计01 闪烁的LED/* 名称:闪烁的LED说明:LED按设定的时间间隔闪烁*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit LED=P1^0;//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){while(1){LED=~LED;DelayMS(150);}}02 从左到右的流水灯/* 名称:从左到右的流水灯说明:接在P0口的8个LED从左到右循环依次点亮,产生走马灯效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intvoid DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){P0=0xfe;while(1){P0=_crol_(P0,1); //P0的值向左循环移动DelayMS(150);}}03 8只LED左右来回点亮/* 名称:8只LED左右来回点亮说明:程序利用循环移位函数_crol_和_cror_形成来回滚动的效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;P2=0x01;while(1){for(i=0;i<7;i++)P2=_crol_(P2,1); //P2的值向左循环移动DelayMS(150);}for(i=0;i<7;i++){P2=_cror_(P2,1); //P2的值向右循环移动DelayMS(150);}}}04 花样流水灯/* 名称:花样流水灯说明:16只LED分两组按预设的多种花样变换显示*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar code Pattern_P0[]={0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe, 0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};uchar code Pattern_P2[]={0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;while(1){ //从数组中读取数据送至P0和P2口显示for(i=0;i<136;i++){P0=Pattern_P0[i];P2=Pattern_P2[i];DelayMS(100);}}}05 LED模拟交通灯/* 名称:LED模拟交通灯说明:东西向绿灯亮若干秒,黄灯闪烁5次后红灯亮,红灯亮后,南北向由红灯变为绿灯,若干秒后南北向黄灯闪烁5此后变红灯,东西向变绿灯,如此重复。
单片机程序100范例+详细注释

100例程序设计范例汇总第一章 (4)【实例1】使用累加器进行简单加法运算: (4)【实例2】使用B寄存器进行简单乘法运算: (4)【实例3】通过设置RS1,RS0选择工作寄存器区1: (4)【实例4】使用数据指针DPTR访问外部数据数据存储器: (4)【实例5】使用程序计数器PC查表: (4)【实例6】IF语句实例: (4)【实例7】SWITCH-CASE语句实例: (4)【实例8】FOR语句实例: (4)【实例9】WHILE语句实例: (5)【实例10】DO...WHILE语句实例: . (5)【实例11】语句形式调用实例: (5)【实例12】表达式形式调用实例: (5)【实例13】以函数的参数形式调用实例: (5)【实例14】函数的声明实例: (5)【实例15】函数递归调用的简单实例: (5)【实例16】数组的实例: (6)【实例17】指针的实例: (6)【实例18】数组与指针实例: (6)【实例19】P1口控制直流电动机实例 (6)第二章 (8)【实例20】用74LS165实现串口扩展并行输入口 (8)【实例21】用74LS164实现串口扩展并行输出口 (10)【实例22】P0I/O扩展并行输入口 (12)【实例23】P0I/O扩展并行输出口 (12)【实例24】用8243扩展I/O端口 (12)【实例25】用8255A扩展I/O口 (14)【实例26】用8155扩展I/O口 (19)第三章 (26)【实例29】与AT24系列EEPROM接口及驱动程序 (26)【实例30】EEPROM(X5045)接口及驱动程序 (30)【实例31】与铁电存储器接口及驱动程序 (33)【实例32】与双口RAM存储器接口及应用实例 (35)【实例33】与NANDFLASH(K9F5608)接口及驱动程序 (35)第四章 (43)【实例34】独立键盘控制 (43)【实例35】矩阵式键盘控制 (44)【实例36】改进型I/O端口键盘 (46)【实例37】PS/2键盘的控制 (49)【实例39】段数码管(HD7929)显示实例 (54)【实例40】16×2字符型液晶显示实例 (55)【实例41】点阵型液晶显示实例 (61)【实例42】LCD显示图片实例 (63)第五章 (70)【实例43】简易电子琴的设计 (70)【实例44】基于MCS-51单片机的四路抢答器 (71)【实例45】电子调光灯的制作 (76)【实例46】数码管时钟的制作 (81)【实例47】LCD时钟的制作 (96)【实例48】数字化语音存储与回放 (103)【实例49】电子标签设计 (112)第六章 (120)【实例50】指纹识别模块 (121)【实例51】数字温度传感器 (121)第七章 (124)【实例53】超声波测距 (124)【实例54】数字气压计 (125)【实例55】基于单片机的电压表设计 (132)【实例56】基于单片机的称重显示仪表设计 (133)【实例57】基于单片机的车轮测速系统 (136)第八章 (138)【实例58】电源切换控制 (138)【实例59】步进电机控制 (140)【实例60】单片机控制自动门系统 (141)【实例61】控制微型打印机 (144)【实例62】单片机控制的EPSON微型打印头 (144)【实例63】简易智能电动车 (145)【实例64】洗衣机控制器 (149)第九章 (152)【实例65】串行A/D转换 (152)【实例66】并行A/D转换 (153)【实例67】模拟比较器实现A/D转换 (154)【实例68】串行D/A转换 (155)【实例69】并行电压型D/A转换 (156)【实例70】并行电流型D/A转换 (156)【实例71】2I C接口的A/D转换 (157)【实例72】2I C接口的D/A转换 (161)【实例73】单片机间双机通信 (164)【实例74】单片机间多机通信方法之一 (166)【实例75】单片机间多机通信方法之二 (171)【实例76】PC与单片机通信 (176)【实例77】红外通信接口 (178)第十一章 (180)【实例79】单片机实现PWM信号输出 (180)【实例80】实现基于单片机的低频信号发生器 (182)【实例81】软件滤波方法 (183)【实例82】FSK信号解码接收 (186)【实例83】单片机浮点数运算实现 (187)【实例84】神经网络在单片机中的实现 (192)【实例85】信号数据的FFT变换 (194)第十二章 (198)【实例86】2I C总线接口的软件实现 (198)【实例87】SPI总线接口的软件实现 (200)【实例88】1-WIRE总线接口的软件实现 (205)【实例89】单片机外挂CAN总线接口 (207)【实例90】单片机外挂USB总线接口 (210)【实例91】单片机实现以太网接口 (214)【实例92】单片机控制GPRS传输 (221)【实例93】单片机实现TCP/IP协议 (223)第十三章 (229)【实例94】读写U盘 (229)【实例95】非接触IC卡读写 (234)【实例96】SD卡读写 (238)【实例97】高精度实时时钟芯片的应用 (242)第十四章 (247)【实例98】智能手机充电器设计 (247)【实例99】单片机控制门禁系统 (248)第一章【实例1】使用累加器进行简单加法运算:MOV A,#02H ;A←2ADD A,#06H ;A←A+06H【实例2】使用B寄存器进行简单乘法运算:MOV A,#02H ; A←2MOV B,#06H ; B←6MUL AB ; BA←A*B=6*2【实例3】通过设置RS1,RS0选择工作寄存器区1:CLR PSW.4 ; PSW.4←0SETB PSW.5 ; PSW.5←1【实例4】使用数据指针DPTR访问外部数据数据存储器:MOV DPTR, #data16 ; DPTR←data16MOVX A, @ DPTR ; A←((DPTR))MOVX @ DPTR, A ; (DPTR)←A【实例5】使用程序计数器PC查表:MOV A, #data ;A←dataMOVC A, @ A+DPTR ; PC←(PC)+1 ,A←((A)+(PC)) 【实例6】if语句实例:void main(){ int a,b,c,min;printf("\n please input three number:");scanf("%d%d%d ",&a,&b,&c);if(a<b&&a<c) printf("min=%d\n",a );else if(b<a&&b<c) printf("min=%d\n",b);else if(c<a&&c<c) printf("min=%d\n",c);else printf("There at least two numbers are equal\n");}【实例7】switch-case语句实例:void main(){ int num; printf("input one number:");scanf("%d",& num);switch(num){ case 1: printf("num =%d\n", num);break;case 2: printf("num =%d\n", num);break;case 3: printf("num =%d\n", num);break;case 4: printf("num =%d\n", num);break;default: printf("The number is out of the range\n", num);}}【实例8】for语句实例:void main(){ for(int a=10;n>0;a --)printf("%d",a);}【实例9】while语句实例:void main(){ int i=0;while(i<=10) i++;}【实例10】do…while语句实例:void main(){ int i=0;do{ i++;}while(i<=10);}【实例11】语句形式调用实例:void main(){ int i=0; while(i<=10) i++; ……Sum(); /*函数调用*/}【实例12】表达式形式调用实例:void main(){ int a,b,i=0; while(i<=10) i++; ……i=4*Sum(a,b); /*函数调用*/}【实例13】以函数的参数形式调用实例:void main(){ int a,b,c,i=0; while(i<=10) i++; ……i= max(c,Sum(a,b)); /*函数调用*/ }【实例14】函数的声明实例:void main(){ int max(int x,int y); /*函数的声明*/ int a,b,c,i=0; while(i<=10) i++; ……i= max(c,Sum(a,b)); /*函数调用*/ }【实例15】函数递归调用的简单实例:void fun(){ int a=1, result,i;for(i=0;i<10;){ i=a+I;result = fun(); /*函数调用*/}return result;}【实例16】数组的实例:void main(){ char num[3] [3]={{ '','#',''},{'#','','#'},{'','#',''}}; /*定义多维数组*/ int i=0,j=0;for(;i<3;i++){ for(;j<3;j++) printf(“%c”,num[i][j]);printf(“/n”);}【实例17】指针的实例:void main(){ int a=3,*p;p=&a; /*将变量a的地址赋值给指针变量p*/printf(“%d,%d”,a,*p); /*输出二者的数值进行对比*/}【实例18】数组与指针实例:void main(){ int i=3,num[3]={1,2,3},*p;p=num; /*将数组num[]的地址赋值给指针变量p*/result =max(p,3); /*函数调用,计算数组的最大值*/}【实例19】P1口控制直流电动机实例sfr p1=0x90;sbit p10=p1^0;sbit p11=p1^1;void main (){int i, m;int j=100;int k=20;// 正快转for (i=0; i<100; i++){P10=1;for (j=0; j<50; j++){m=0;}}P10=0;for (j=0; j<10; j++){m=0}//正慢转for (i=0; i<100; i++) {P10=1;for (j=0; j<10; j++) {m=0}}p10=0;for (j=0; j<50; j++) {m=0}// 负快转for (i=0; i<100; i++) {p11=1;for (j=0; j<50; j++) {m=0;}}p11=0;for (j=0; j<10; j++) {m=0;}// 负慢转for (i=0; i<100; i++) {p11=1;for (j=0;j<10;j++) {m=0;}}p11=0for (j=0; j<50; j++) {m=0;}}第二章【实例20】用74LS165实现串口扩展并行输入口(1)函数声明管脚定义//---------------------------------------库函数声明,管脚定义------------------------------------------ #include<reg52.h>sbit LOAD=P1^7;//用P1^7控制SH/ 管脚(2)串口初始化函数UART_init()//-------------------------------------------------------------------------------------------------------------- // 函数名称:UART_init()// 功能说明:串口初始化,设定串口工作在方式0//-------------------------------------------------------------------------------------------------------------- void UART_init(void){SCON=0x10;//设串行口方式0,允许接收,启动接收过程ES=0;//禁止串口中断}(3)数据接收函数PA()//-------------------------------------------------------------------------------------------------------------- // 函数名称:PA()// 输入参数:无// 输出参数:返回由并口输入的数据// 功能说明:接收八位串行数据//-------------------------------------------------------------------------------------------------------------- unsigned char PA(void){unsigned char PA_data;LOAD=0;//当P1.7输出低电平,74LS165将并行数据装入寄存器//当中LOAD=1;//当P1.7输出高电平,74LS165在时钟信号下进行移位UART_init();//74LS165工作在时钟控制下的串行移位状态while(RI==0);//循环等待RI=0;PA_data=SBUF;return PA_data;//返回并行输入的数据}(1)函数声明管脚定义//---------------------------------------库函数声明,管脚定义------------------------------------------ #include<reg52.h>sbit a7=ACC^7;sbit simuseri_CLK=P1^6;//用P1^6模拟串口时钟sbit simuseri_DATA=P1^5;//用P1^5模拟串口数据sbit drive74165_LD=P1^7;//用P1^7控制SH/ 管脚(2)数据输入函数in_simuseri()//-------------------------------------------------------------------------------------------------------------- // 函数名称:in_simuseri()// 输入参数:无// 输出参数:data_buf// 功能说明:8位同位移位寄存器,将simuseri_DATA串行输入的数据按从低位到// 高位// 保存到data_buf//-------------------------------------------------------------------------------------------------------------- unsigned char in_simuseri(void){unsigned char i;unsigned char data_buf;i=8;do{ACC=ACC>>1;for(;simuseri_CLK==0;);a7= simuseri_DA TA;for(;simuseri_CLK==1;);}while(--i!=0);simuseri_CLK=0;data_buf=ACC;return(data_buf);}(3)数据输出函数PAs()//-------------------------------------------------------------------------------------------------------------- // 函数名称:PAs()// 输入参数:无// 输出参数:PAs _buf,返回并行输入74LS165的数据// 功能说明:直接调用,即可读取并行输入74LS165的数据,不需要考虑74LS165的// 工作原理//--------------------------------------------------------------------------------------------------------------unsigned char PAs(void){unsigned char PAs_buf;drive74165_LD=0;drive74165_LD=1;PAs_buf= in_simuseri();return(PAs_buf);}【实例21】用74LS164实现串口扩展并行输出口单片机串口驱动74LS164的程序主要包括函数声明管脚定义部分、串口初始化函数以及数据发送函数。
嵌入式单片机开发设计实例
嵌入式单片机开发设计实例
以下是一些嵌入式单片机开发的设计实例:
1. 温度测量系统:使用单片机与温度传感器连接,实时读取环境温度并显示在液晶屏上。
可以通过按键切换温度单位(摄氏度或华氏度),并设置温度报警阈值,当温度超过阈值时触发蜂鸣器报警。
2. 智能家居系统:将单片机与各种传感器(如光照、湿度、烟雾等)和执行器(如灯泡、窗帘)连接,实现自动化控制。
可以通过手机APP或遥控器远程操控家居设备,也可以设置定时任务,如定时开关灯、定时浇水等。
3. 电子秤:使用单片机控制称重传感器,实时测量物品的重量,并显示在液晶屏上。
可以设置称重范围和精度,当超过范围或精度不足时触发蜂鸣器报警。
4. 智能车辆控制系统:将单片机与各种传感器(如光电传感器、红外线传感器、超声波传感器等)和执行器(如电机、舵机)连接,实现对车辆的控制。
可以通过遥控器或手势识别等方式控制车辆的前进、后退、转向等操作。
5. RFID门禁系统:使用单片机与RFID读写器连接,实现对门禁的管理。
当合法的RFID卡片靠近读写器时,门自动打开,同时记录进出时间和人员信息。
可以通过管理软件对人员的出入进行管理和统计。
这些设计实例只是嵌入式单片机开发的一小部分,实际应用非常广泛,可以根据需求进行扩展和定制。
7个基于STM32单片机的精彩设计实例

7个基于STM32单片机的精彩设计实例STM32单片机STM32是ST公司推出的基于ARM-Cortex-M3内核的32位单片机。
STM32单片机的架构优势除新增的功能强化型外设接口外,STM32互连系列还提供与其它STM32微控制器相同的标准接口,这种外设共用性提升了整个产品家族的应用灵活性,使开发人员可以在多个设计中重复使用同一个软件。
新STM32的标准外设包括10个定时器、两个12位1-Msample/s 模数转换器(交错模式下2-Msample/s)、两个12位数模转换器、两个I2C接口、五个USART接口和三个SPI端口。
新产品外设共有12条DMA通道,还有一个CRC计算单元,像其它STM32微控制器一样,支持96位唯一标识码。
新系列微控制器还沿续了STM32产品家族的低电压和节能两大优点。
2.0V到3.6V的工作电压范围兼容主流的电池技术,如锂电池和镍氢电池,封装还设有一个电池工作模式专用引脚Vbat。
以72MHz频率从闪存执行代码,仅消耗27mA电流。
低功耗模式共有四种,可将电流消耗降至两微安。
从低功耗模式快速启动也同样节省电能;启动电路使用STM32内部生成的8MHz信号,将微控制器从停止模式唤醒用时小于6微秒。
STM32单片机的低功耗性能意法半导体的EnergyLite超低功耗技术平台是STM32L取得业内领先的能效性能的关键。
这个技术平台也被广泛用于意法半导体的8位微控制器STM8L系列产品。
EnergyLite超低功耗技术平台基于意法半导体独有的130nm制造工艺,为实现超低的泄漏电流特性,意法半导体对该平台进行了深度优化。
在工作和睡眠模式下,EnergyLite超低功耗技术平台可以最大限度提升能效。
此外,该平台的内嵌闪存采用意法半导体独有的低功耗闪存技术。
这个平台还集成了直接访存(DMA)支持功能,在应用系统运行过程中关闭闪存和CPU,外设仍然保持工作状态,从而可为开发人员节省大量的时间。
35个单片机设计应用实例

图 4.2.2
void main(void) { while(1) { if(K1==0) { L1=0; //灯亮 } else { L1=1; //灯灭 } } }
3. 多路开关状态指示
1. 实验任务
如图 4.3.1 所示,AT89S51 单片机的 P1.0-P1.3 接四个发光二极管 L1-L4, P1.4-P1.7 接了四个开关 K1-K4,编程将开关的状态反映到发光二极管上。 (开关闭合,对应的灯亮,开关断开,对应的灯灭)。
因此在按键按下的时候图482要把我们手上的干扰信号以及按键的机械接触等干扰信号给滤除掉一般情况下我们可以采用电容来滤除掉这些干扰信号但实际上会增加硬件成本及硬件电路的体积这是我们不希望总得有个办法解决这个问题因此我们可以采用软件滤波的方法去除这些干扰信号一般情况下一个按键按下的时候总是在按下的时刻存在着一定的干扰信号按下之后就基本上进入了稳定的状态
(2. 输出控制
根据开关的状态,由发光二极管 L1-L4 来指示,我们可以用 SETB P1.X 和 CLR P1.X 指令来完成,也可以采用 MOV P1,#1111XXXXB 方法一次指示。
5. 程序框图
<![endif]-->
读 P1 口数据到 ACC 中
ACC 内容右移 4 次 ACC 内容与 F0H 相或 ACC 内容送入 P1 口
void main(void) { while(1) { L1=0; delay02s();
L1=1; delay02s(); } }
2. 模拟开关灯 1. 实验任务
如图 4.2.1 所示,监视开关 K1(接在 P3.0 端口上),用发光二极管 L1(接 在单片机 P1.0 端口上)显示开关状态,如果开关合上,L1 亮,开关打开, L1 熄灭。 2. 电路原理图
单片机c语言程序设计实例100例--基于805i+proteus仿真
以下是一个基于8051单片机和Proteus仿真环境的C语言程序设计实例:实例1:点亮LED灯
在这个例子中,我们将使用C语言编写一个简单的程序来控制8051单片机的一个I/O引脚,使其驱动一个LED灯。
c代码:
要使用Proteus进行仿真,你需要按照以下步骤操作:
1. 打开Proteus软件,创建一个新的设计工程。
2. 在元件库中搜索并添加相应的8051单片机型号(如AT89C51)和LED 元件到工作区。
3. 根据实际硬件连接,正确配置单片机的引脚和LED的连接。
4. 右键单击单片机元件,选择“Edit Component”打开编辑窗口。
5. 在“Program File(s)”区域,点击右侧的浏览按钮,选择你的C语言源文件(如上述的main.c)。
6. 点击“OK”关闭编辑窗口,然后点击工具栏上的“Play”按钮开始仿真。
在仿真过程中,你应该能看到LED灯被点亮,这表明你的C语言程序已经在Proteus环境中成功运行。
以上只是一个基础的例子,实际的"单片机C语言程序设计实例100例--基于8051+Proteus仿真"会包含更复杂和多样化的应用场景,包括定时器/计数器
应用、中断处理、串口通信、ADC/DAC转换、液晶显示等等。
每个实例都会详细介绍程序设计思路、代码实现以及如何在Proteus中进行仿真调试。
通过这些实例的学习和实践,你可以逐步掌握8051单片机的C语言编程技巧和Proteus仿真环境的使用方法。
单片机35个实例3
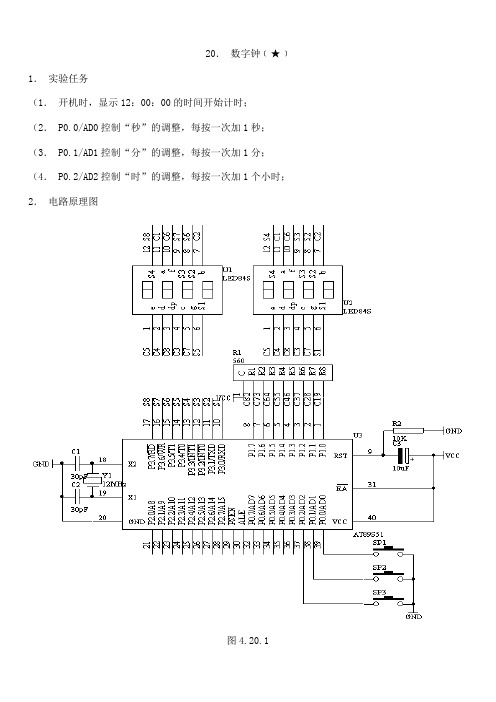
20.数字钟﹝★﹞1.实验任务(1.开机时,显示12:00:00的时间开始计时;(2. P0.0/AD0控制“秒”的调整,每按一次加1秒;(3. P0.1/AD1控制“分”的调整,每按一次加1分;(4. P0.2/AD2控制“时”的调整,每按一次加1个小时;2.电路原理图3.系统板上硬件连线(1.把“单片机系统”区域中的P1.0-P1.7端口用8芯排线连接到“动态数码显示”区域中的A -H端口上;(2.把“单片机系统:区域中的P3.0-P3.7端口用8芯排线连接到“动态数码显示”区域中的S1-S8端口上;(3.把“单片机系统”区域中的P0.0/AD0、P0.1/AD1、P0.2/AD2端口分别用导线连接到“独立式键盘”区域中的SP3、SP2、SP1端口上;4.相关基本知识(1.动态数码显示的方法(2.独立式按键识别过程(3.“时”,“分”,“秒”数据送出显示处理方法5.程序框图6.汇编源程序SECOND EQU 30HMINITE EQU 31HHOUR EQU 32HHOURK BIT P0.0MINITEK BIT P0.1SECONDK BIT P0.2DISPBUF EQU 40HDISPBIT EQU 48HT2SCNTA EQU 49HT2SCNTB EQU 4AHTEMP EQU 4BHORG 00HLJMP STARTORG 0BHLJMP INT_T0START: MOV SECOND,#00HMOV MINITE,#00HMOV HOUR,#12MOV DISPBIT,#00HMOV T2SCNTA,#00HMOV T2SCNTB,#00HMOV TEMP,#0FEHLCALL DISPMOV TMOD,#01HMOV TH0,#(65536-2000) / 256 MOV TL0,#(65536-2000) MOD 256 SETB TR0SETB ET0SETB EAWT: JB SECONDK,NK1LCALL DELY10MSJB SECONDK,NK1INC SECONDMOV A,SECONDCJNE A,#60,NS60MOV SECOND,#00HNS60: LCALL DISPJNB SECONDK,$NK1: JB MINITEK,NK2LCALL DELY10MSJB MINITEK,NK2INC MINITEMOV A,MINITEMOV MINITE,#00H NM60: LCALL DISP JNB MINITEK,$NK2: JB HOURK,NK3 LCALL DELY10MSJB HOURK,NK3INC HOURMOV A,HOURCJNE A,#24,NH24 MOV HOUR,#00HNH24: LCALL DISP JNB HOURK,$NK3: LJMP WT DELY10MS:MOV R6,#10D1: MOV R7,#248 DJNZ R7,$DJNZ R6,D1RETDISP:MOV A,#DISPBUF ADD A,#8DEC AMOV R1,AMOV A,HOURMOV B,#10DIV ABMOV @R1,ADEC R1MOV A,BMOV @R1,ADEC R1MOV A,#10MOV@R1,ADEC R1MOV A,MINITE MOV B,#10DIV ABMOV @R1,ADEC R1MOV A,BMOV @R1,ADEC R1MOV A,#10MOV@R1,AMOV A,SECONDMOV B,#10DIV ABMOV @R1,ADEC R1MOV A,BMOV @R1,ADEC R1RETINT_T0:MOV TH0,#(65536-2000) / 256 MOV TL0,#(65536-2000) MOD 256 MOV A,#DISPBUFADD A,DISPBITMOV R0,AMOV A,@R0MOV DPTR,#TABLEMOVC A,@A+DPTRMOV P1,AMOV A,DISPBITMOV DPTR,#TABMOVC A,@A+DPTRMOV P3,AINC DISPBITMOV A,DISPBITCJNE A,#08H,KNAMOV DISPBIT,#00HKNA: INC T2SCNTAMOV A,T2SCNTACJNE A,#100,DONEMOV T2SCNTA,#00HINC T2SCNTBMOV A,T2SCNTBCJNE A,#05H,DONEMOV T2SCNTB,#00HINC SECONDMOV A,SECONDCJNE A,#60,NEXTMOV SECOND,#00HINC MINITEMOV A,MINITECJNE A,#60,NEXTMOV MINITE,#00HINC HOURMOV A,HOURMOV HOUR,#00HNEXT: LCALL DISPDONE: RETITABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH,40H TAB: DB 0FEH,0FDH,0FBH,0F7H,0EFH,0DFH,0BFH,07FHEND7. C语言源程序#include <AT89X51.H>unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f, 0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00};unsigned char dispbitcode[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};unsigned char dispbuf[8]={0,0,16,0,0,16,0,0}; unsigned char dispbitcnt;unsigned char second;unsigned char minite;unsigned char hour;unsigned int tcnt;unsigned char mstcnt;unsigned char i,j;void main(void){TMOD=0x02;TH0=0x06;TL0=0x06;TR0=1;ET0=1;EA=1;while(1){if(P0_0==0){for(i=5;i>0;i--)for(j=248;j>0;j--);if(P0_0==0){second++;if(second==60)}dispbuf[0]=second%10;dispbuf[1]=second/10;while(P0_0==0);}}if(P0_1==0){for(i=5;i>0;i--)for(j=248;j>0;j--);if(P0_1==0){minite++;if(minite==60){minite=0;}dispbuf[3]=minite%10;dispbuf[4]=minite/10;while(P0_1==0);}}if(P0_2==0){for(i=5;i>0;i--)for(j=248;j>0;j--);if(P0_2==0){hour++;if(hour==24){hour=0;}dispbuf[6]=hour%10;dispbuf[7]=hour/10;while(P0_2==0);}}}}void t0(void) interrupt 1 using 0 {mstcnt++;if(mstcnt==8)P1=dispcode[dispbuf[dispbitcnt]]; P3=dispbitcode[dispbitcnt]; dispbitcnt++;if(dispbitcnt==8){dispbitcnt=0;}}tcnt++;if(tcnt==4000){tcnt=0;second++;if(second==60){second=0;minite++;if(minite==60){minite=0;hour++;if(hour==24){hour=0;}}}dispbuf[0]=second%10;dispbuf[1]=second/10;dispbuf[3]=minite%10;dispbuf[4]=minite/10;dispbuf[6]=hour%10;dispbuf[7]=hour/10;}}21.拉幕式数码显示技术1.实验任务用AT89S51单片机的P0.0/AD0-P0.7/AD7端口接数码管的a-h端,8位数码管的S1-S8通过74LS138译码器的Y0-Y7来控制选通每个数码管的位选端。
单片机开发案例

单片机开发案例在现代科技的浪潮中,单片机以其强大的功能和广泛的应用领域,成为了电子工程师们手中的得力工具。
从智能家居到工业自动化,从医疗设备到消费电子,单片机的身影无处不在。
下面,让我们一起来深入了解几个单片机开发的案例。
案例一:智能温度控制系统在工业生产中,对温度的精确控制至关重要。
为了实现这一目标,我们基于单片机开发了一套智能温度控制系统。
首先,我们选用了一款性能稳定、功能强大的单片机,如 STM32系列。
它具有丰富的外设资源和较高的运算速度,能够满足系统的实时性要求。
温度传感器采用了高精度的热敏电阻或热电偶,将温度变化转化为电信号。
这些电信号经过放大、滤波等处理后,输入到单片机的模拟数字转换器(ADC)中,单片机对转换后的数字信号进行处理和计算,得到当前的温度值。
根据设定的温度范围,单片机通过控制继电器或可控硅等器件,来调节加热或冷却设备的工作状态。
例如,当温度低于下限值时,单片机控制加热设备开启;当温度高于上限值时,控制冷却设备启动。
为了实现人机交互,我们还配备了液晶显示屏(LCD)和按键。
通过显示屏可以实时显示当前温度和设定的温度范围,按键则用于设置温度上下限等参数。
在软件方面,我们采用了 C 语言进行编程。
通过合理的算法和控制逻辑,实现了温度的精确控制和稳定运行。
同时,还加入了故障检测和报警功能,当传感器故障或温度异常时,系统能够及时发出警报,提醒工作人员进行处理。
案例二:智能家居灯光控制系统随着人们生活水平的提高,对家居智能化的需求也日益增长。
智能家居灯光控制系统就是其中的一个重要应用。
在这个系统中,我们选用了低功耗的单片机,如 Arduino 系列。
它具有简单易用、成本低廉的特点,非常适合智能家居应用。
灯光控制采用了智能灯泡或 LED 灯带,通过蓝牙或 WiFi 模块与单片机进行通信。
用户可以通过手机 APP 或语音指令,向单片机发送控制信号。
单片机接收到控制信号后,解析并执行相应的操作。
51单片机设计实例

51单片机设计实例
1. 电子钟:使用51单片机设计一个数字时钟,可以显示小时和分钟,并能够设置闹钟功能。
2. 温度监控器:使用51单片机设计一个温度监控器,可以实时监测当前温度,并根据设定的阈值发出警报。
3. 电子秤:使用51单片机设计一个电子秤,可以精确测量物体的重量,并显示在LCD屏幕上。
4. 电子门锁:使用51单片机设计一个电子门锁系统,可以使用密码或者指纹进行解锁,并记录进出门的时间。
5. 智能家居控制器:使用51单片机设计一个智能家居控制器,可以通过手机APP控制家庭中的灯光、空调、窗帘等设备。
6. 智能车:使用51单片机设计一个智能车,可以根据传感器检测到的环境信息进行自主导航和避障。
7. 电子琴:使用51单片机设计一个简单的电子琴,可以通过按键发出不同的音符。
8. 电子游戏机:使用51单片机设计一个简单的电子游戏机,可以玩一些简单的游戏如打砖块、赛车等。
9. 电子宠物:使用51单片机设计一个虚拟宠物,可以通过按钮和
显示屏与宠物进行互动,喂食、玩耍等。
10. 无线遥控器:使用51单片机设计一个无线遥控器,可以控制电视、空调、音响等家电设备。
单片机应用系统设计实例
一、控制原理: 虚线表示允许水位变化的上下限。 水塔由电机带动水泵供水,单片 机控制电机转动以达到对水位控 制的目的。 ①当水位上升,达到上限时,因水导电,B、C棒连通+5V。b、c均为“1”,应停止电机和水泵的工作,不再供水; ②当水位降到下限时,B、C棒都不能与A棒导电。 b、c均为“0”,应启动电机,带动水泵工作,给水塔供水; ③当水位处于上下限之间时,B与A棒导通。 b为“1”, c为“0”,无论怎样都应维持原有的工作状态。
输出控制电路
输出高电平:双向可控硅导通,电热丝通电; 输出低电平:双向可控硅截止,电热丝断电。 8155 I/O端口的负载能力不足以驱动光电耦合器的发光 二极管,用1413作为功放。 控制算法:对于温度控制系统,系统具有大热惯性,系统采用脉冲宽度调制的控制方法。 也可用PID算法、Smith算法、Dalin算法等。
温度信号输入通道
MC14433是双积分3 ½ 位的A/D转换器:采用扫描的方法, 输出3 ½ 位的BCD码,从0000~1999共2000个数码。内部有时钟源(振荡器)。 VR:基准电压输入线,其值为200mV或2V; VX:被测电压输入线,最大为199.9mV或1.999V。 DS4~DS1:分别是个、十、百、千位的选通脉冲输出线; Q3~Q0 :BCD码数据输出线,动态地输出千位、百位、十位、个位值。 即DS4有效时,Q3~Q0表示的是个位值(0~9);依次类推。 EOC与INT0相接使得MC14433每次A/D结束后,同时启动下一次转换,使其处于 连续的A/D转换中,并使得单片机在中断服务程序中读入该次转换结果。
单击此处添加大标题内容
硬件:时钟电路片 软件:片内定时器 在单片机计时的过程中,每一次秒加1,都与规定的作 息时间比较,如比较相等就进行电铃或扩音设备的开关控制。 本系统共有4项控制内容:接通电铃和断开电铃; 接通和断开扩音设备。 由P1口输出控制码进行控制,其控制码定义为: 接通电铃:0FEH 断开电铃:0FDH 接通扩音设备:7FH 断开扩音设备:0BFH
几个单片机应用实例
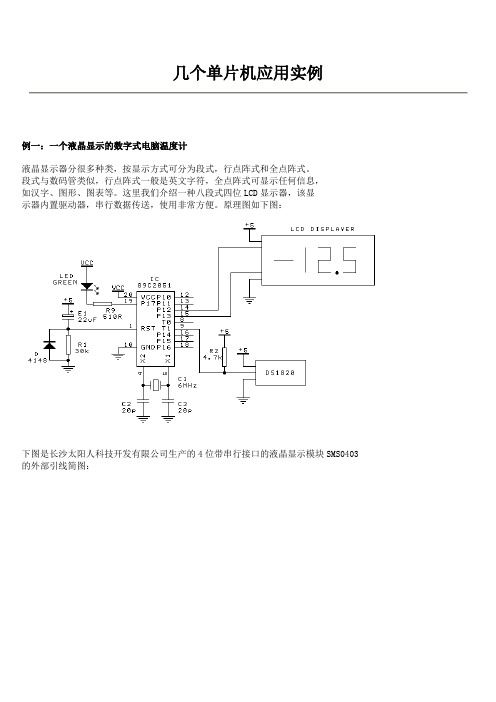
几个单片机应用实例例一:一个液晶显示的数字式电脑温度计液晶显示器分很多种类,按显示方式可分为段式,行点阵式和全点阵式。
段式与数码管类似,行点阵式一般是英文字符,全点阵式可显示任何信息,如汉字、图形、图表等。
这里我们介绍一种八段式四位LCD显示器,该显示器内置驱动器,串行数据传送,使用非常方便。
原理图如下图:下图是长沙太阳人科技开发有限公司生产的4位带串行接口的液晶显示模块SMS0403 的外部引线简图:有关该模块的具体参数,请查看该公司网站。
此例中使用的温度传感器为美国DALLAS公司生产的单总线式数字温度传感器。
该传感器本站有其详细的资料可供下载。
此例稍加改动,即可做成温控器。
下载驱动该模块的源程序LCD.PLM例2: LED显示电脑电子钟本例介绍一种用LED制作的电脑电子钟(电脑万年历)。
原理图如下图所示:上图中,CPU选用的是AT89C2051,时钟芯片选用的是Dallas公司的DS1302, 温度传感器选用的是Dallas公司的数字温度传感器DS1820,显示驱动芯片选用的是德州仪器公司的TPIC6B595,也可选用与其兼容的芯片NC595或国产的AMT9595。
整个电子钟用两个键来调节时间和日期。
一个是位选键,一个是数字调节键。
按一下位选键,头两位数字开始闪动,进入设定调节状态,此时按数字调节键,当前闪动位的数字就可改变。
全部参数调节完后,五秒钟内没有任何键按下,则数字停止闪动,退出设定调节状态。
源程序清单如下(无温度显示程序):start:do;$include(reg51.dcl)declare (sclk,io,rst) bit at (0b3h) register; /* p33,p34,p35 */ declare (command,data,n,temp1,num) byte;declare a(9) byte;declare ab(6) byte;declare aco(11) byte constant (0fdh,60h,0dah,0f2h,66h,0b6h,0beh,0e0h,0feh,0f6h,00h);declare week(11) byte constant (0edh,028h,0dch,7ch,39h,75h,0f5h,2ch,0fdh,7dh,00h);declare da literally 'p15',clk literally 'p16',ale literally 'p17', mk literally 'p11',sk literally 'p12';clear:procedure;sclk=0;io=0;rst=0;end clear;send1302:procedure(comm);declare (i,comm) byte;do i=0 to 7;comm=scr(comm,1);io=cy;call time(1);sclk=0;call time(1);sclk=1;end;end send1302;wbyt1:procedure(com,dat);/*字节写过程*/ declare (com,dat) byte;call clear;rst=1;call send1302(com);call send1302(dat);call clear;end wbyt1;wbyt8:procedure;/*时钟多字节突发模式写过程*/ declare j byte;call clear;a(7)=A(6);a(6)=a(0);rst=1;call send1302(command);do j=1 to 8;call send1302(a(j));end;call clear;end wbyt8;RBYT1:PROCEDURE;DECLARE I BYTE;CALL CLEAR;RST=1;call send1302(0c1h);IO=1;DO I=0 TO 7;SCLK=1;SCLK=0;CY=IO;N=SCR(N,1);END;A(8)=N;CALL CLEAR;END RBYT1;send595:procedure;declare k byte;do k=0 to 7;data=scr(data,1);da=cy;clk=1;clk=0;end;end send595;send595_1:procedure;declare k byte;do k=0 to 7;data=scr(data,1);da1=cy;clk1=1;clk1=0;end;end send595_1;rb1:procedure(abc,j);DECLARE (I,j,abc) BYTE;CALL CLEAR;RST=1;call send1302(abc);IO=1;DO I=0 TO 7;SCLK=1;SCLK=0;CY=IO;N=SCR(N,1);END;ab(j)=N;ab(j)=dec(ab(j));CALL CLEAR;end rb1;rbyt6:procedure;call rb1(0f1h,0);call rb1(0f3h,1);call rb1(0f5h,2);call rb1(0f7h,3);call rb1(0f9h,4);call rb1(0fbh,5);call rb1(0fdh,6);end rbyt6;wbyt6:procedure;call wbyt1(8eh,0); /* write enable */ call wbyt1(0f0h,ab(0));call wbyt1(0f2h,ab(1));call wbyt1(0f4h,ab(2));call wbyt1(0f6h,ab(3));call wbyt1(0f8h,ab(4));call wbyt1(0fah,ab(5));call wbyt1(0fch,ab(6));call wbyt1(8eh,80h); /* write disable */end wbyt6;rbyt8:procedure;/*时钟多字节突发模式读过程*/ declare (i,j) byte;call clear;rst=1;call send1302(command);io=1;do j=1 to 8;do i=0 to 7;sclk=1;call time(1);sclk=0;cy=io;n=scr(n,1);end;a(j)=n;end;call clear;a(0)=a(6);a(6)=A(7);a(0)=a(0) and 0fh;if a(0)>6 then a(0)=0;CALL RBYT1;if (a(1)=0 and a(2)=0 and a(3)=0) thendo;do num=0 to 35;call time(250);end;temp1=1;end;if temp1=1 thendo;temp1=0;ab(4)=ab(4)+1;if ab(4)>99h thendo;ab(4)=0;ab(5)=ab(5)+1;if ab(5)>99h then ab(5)=0;end;call wbyt6;end;end rbyt8;display:procedure; /*jieya,yima,fasong*/ declare (i,n,m) byte;n=a(0) and 0fh; /* send week */data=week(n);call send595;n=a(4); /* send date */n=n and 0fh;data=aco(n);call send595;n=a(4);n=shr(n,4);data=aco(n);call send595;do i=1 to 3; /* send second,minute,hour */ n=a(i);n=n and 0fh;data=aco(n);call send595;n=a(i);n=shr(n,4);data=aco(n);call send595;end;do i=5 to 6; /* send month,year */n=a(i);n=n and 0fh;data=aco(n);call send595;n=a(i);n=shr(n,4);data=aco(n);call send595;end;n=a(8); /* send 19 or 20 */n=n and 0fh;data=aco(n);call send595;n=a(8);n=shr(n,4);data=aco(n);call send595;do m=0 to 5;n=ab(m);n=n and 0fh;data=aco(n);call send595_1;n=ab(m);n=shr(n,4);data=aco(n);call send595_1;end;ale=0;ale=1;end display;beginset:procedure;a(0)=06h;a(1)=58h;a(2)=59h;a(3)=23h;a(4)=30h;a(5)=06h;a(6)=97h;a(7)=00;a(8)=19h; /* set date/time (1997,7,1,8:00:00,week 3) */ call wbyt1(8eh,0); /* write enable*/call wbyt1(80h,00h);/* start colock */call wbyt1(0beh,0abh);/*两个二极管与8K电阻串联充电*/ command=0beh; /* write colock/date */call wbyt8;call wbyt1(0c0h,a(8));call wbyt1(8eh,80h); /* set write protect bit */end beginset;key:procedure;declare (i,time1,k1,tem) byte;call time(100);k1=7;time1=30;if mk=0 thendo;do while time1>0;week: if k1=0 thendo;do i=0 to 5;/* call hz(a(0)); */end;do i=0 to 3;/* call hz0; */end;end;tem=a(k1);if k1=7 then tem=a(8);a(k1)=0aah;if k1=7 then a(8)=0aah;call display;call time(254);call time (254);a(k1)=tem;if k1=7 then a(8)=tem;call display;call time(254);call time(254);call time(254);time1=time1-1;if mk=0 thendo;call time(100); /*MOD KEY PROCESS*/TIME1=30;IF MK=0 THENDO;k1=k1-1;DO WHILE K1=0FFH;K1=7;END;END;end;IF SK=0 THENDO;CALL TIME(100); /*SET KEY PROCESS*/ TIME1=30;IF SK=0 THENDO;tem=tem+1;tem=dec(tem);DO CASE K1;DO WHILE tem=7;/*week*/tem=0;END;DO WHILE tem=60H;/*scond*/tem=0;END;DO WHILE tem=60H;/*minute*/tem=0;END;DO WHILE tem=24H;/*hour*/tem=0;END;DO WHILE tem=32H;/*date*/tem=1;END;DO WHILE tem=13H;/*month*/tem=1;END;DO while tem=100h; /* YEAR */tem=00;END;DO WHILE TEM>=21H;tem=19H;END;END;A(K1)=tem;if k1=7 then a(8)=tem;END;END;END;END;end key;main$program:mk=1;sk=1;temp1=0;num=0;p32=1;if sk=0 then call beginset;clk=0;da=0;ale=1;loop:do while mk=1 ;if a(0)>6 then a(0)=0;command=0bfh;call rbyt8;call display;do while mk=0;call key;call wbyt1(8eh,0);command=0beh;call wbyt8;call wbyt1(0C0H,A(8));call wbyt1(8eh,80h);end;end;goto loop;end start;例3:一个6位LED、4个按键的显示板按键和显示是单片机系统的基本输入输出部件,下面介绍一个由74LS164驱动的6位数码管和4个按键组成的通用仪表面板。
单片机系统课程设计举例

优势:高可靠性、低成本、易于维护和升级。
智能仪表和传感器系统
智能仪表:用于测量和控制各种物理量,如温度、压力、流量等 传感器系统:用于采集环境中的各种信息,如温度、湿度、光照等
单片机系统:用于处理和分析传感器采集到的数据,并控制智能仪表进行相应的操作
应用领域:智能家居、工业自动化、医疗设备等
编程语言:C 语言、汇编 语言等
调试方法: 单步调试、 断点调试、 观察变量等
常见问题: 内存溢出、 堆栈溢出、 死循环等
解决方案: 优化代码、 增加内存、 修改堆栈大 小等
系统测试和优化
测试方法:单元测试、集成测试、系统测试等 测试工具:模拟器、示波器、逻辑分析仪等 优化目标:提高系统性能、降低功耗、提高稳定性等 优化方法:算法优化、硬件优化、软件优化等
Part Five
单片机系统应用举 例
智能家居控制系统
功能:实现家庭设备的智能控 制,如灯光、空调、窗帘等
特点:远程控制、定时控制、 智能联动、节能环保
技术:单片机、传感器、无线 通信、人工智能等
应用:家庭、酒店、办公楼等 场所
工业自动化控制系统
简介:单片机系统在工业自动化控制系统中得到广泛应用,如智能仪表、 电机控制等。 应用领域:工业自动化、智能制造、机器人技术等。
单片机应用领域
家用电器:如洗衣机、冰 箱、空调等
医疗设备:如医疗仪器、 医疗电子设备等
航空航天:如卫星、航天 器等
工业控制:如自动化生 产线、机器人等
汽车电子:如汽车电子 控制系统、车载导航系
统等
通信设备:如手机、路 由器等
军事领域:如武器装备、 军事通信等
单片机系统组成
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MOV 73H,77H
MOV 74H,7AH
MOV 75H,7AH
AJMP INTT1OUT
;
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; 加1程序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;时间计数单元在70H—71H(秒)、76H—77H(分)、78H—79H(时),7AH单元放熄灭符(#0AH)
;计数单元采用BCD码计数,定时器T0设置为50MS溢出中断,为秒计数用,定时器T1为调整时闪烁用
;P3.7为调整按钮,P1口 为字符输出口,采用共阳显示管。
;
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
应用程序设计实例
浙江海洋学院楼然苗
6.1闪烁LED小灯的设计
6.2六位数码管时钟电路的设计
6.3 LED广告显示电路的设计
6.4 8路输入模拟信号的数值显示电路
6.5单键学习型遥控器的设计
6.6十六路遥控电路的设计
6.7遥控码的仿真应用设计
6.8自行车里程\速度计的设计
6.9自动往返行驶小汽车的设计
RET
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; AT89C2051时钟程序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;显示缓冲单元在70H—75H,70H—71H显示秒,72H—73H显示分,74H—75H显示时
;; 闪动调时 程 序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
INTT1: PUSH ACC
PUSH PSW
MOV TL1, #0B0H
MOV TH1, #3CH
DJNZ R2,INTT1OUT
MOV R2,#06H
CPL 02H
JB 02H,FLASH1
ACALL ADD1
MOV A,R3
CLR C
CJNE A,#24H,HOUR
HOUR: JC OUTT0
ACALL CLR0
OUTT0: MOV 72H,76H
MOV 73H,77H
MOV 74H,78H
MOV 75H,79H
POP PSW
POP ACC
SETB ET0
RETI
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
SETB F0
FUN01:LCALL FUN00
LCALL STAR1
LJMP FUN01
;
FUN1:LCALL DL10MS ;消岸抖动
JB P3.1,STAR1
WAITL1:JNB P3.1,WAITL1 ;等待键释放
SETB F0
FUN10:LCALL FUN11
LCALL STAR1
LJMP FUN10
start1: LCALL DISPLAY
JNB P3.7,SETMM1
SJMP Start1
SETMM1: LJMPSETMM
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; 1秒定时 程 序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
LCALL ADD1
MOV A,R3
CLR C
CJNE A,#60H,HHH
HHH: JC SET4
LCALL CLR0
CLR C
AJMP SET4
CLOSEDIS: SETB ET0
SETB TR0
CLOSE: JB P3.7,CLOSE
LCALL DISPLAY
JB P3.7,CLOSE
WAITH: JNB P3.7,WAITH
JZ OUT
RL A
ANL A,P1
AJMP FUN111
;
FUN22:MOV A,#0AAH
MOV P1,A
LCALL DL30S
CPL A
MOV P1,A
LCALL DL30S
RET
;
;************;
; 延时程序 ;
;************;
;
DL512:MOV R2,#0FFH
LOOP1: DJNZ R2,LOOP1
CLEARDISP: MOV @R0, #00H
INC R0
DJNZ R7,CLEARDISP
MOV 7AH,#0AH
MOV TMOD,#11H
MOV TL0, #0B0H
MOV TH0, #3CH
MOV TL1, #0B0H
MOV TH1, #3CH
SETB EA
SETB ET0
SETB TR0
MOV R4,#14H
;
FUN2:LCALL DL10MS ;消岸抖动
JB P3.2,STAR1
WAITL2:JNB P3.2,WAITL2 ;等待键释放
SETB F0
FUN20:LCALL FUN22
LCALL STAR1
LJMP FUN20
;
FUN3:LCALL DL10MS ;消岸抖动
JB P3.3,STAR1
WAITL3:JNB P3.3,WAITL3 ;等待键释放
RETI
ORG 001BH
RETI
ORG 0023H
RETI
;
;************;
; 初始化程序 ;
;************;
;
CLEAR: RET
;
;************;
; 主 程 序 ;
;************;
;
START:ACALL CLEAR
STAR1:MOV P3,#0FFH
JNB P3.0,FUN0
JNB P3.1,FUN1
JNB P3.2,FUN2
JNB P3.3,FUN3 ;关闭按纽
JNB F0,STAR1 ;曾经有键按下F0置1
RET
;
FUN0:LCALL DL10MS ;消岸抖动
JB P3.0,STAR1
WAITL0:JNB P3.0,WAITL0 ;等待键释放
MOV 72H,76H
MOV 73H,77H
MOV 74H,78H
MOV 75H,79H
INTT1OUT: POP PSW
POP ACC
RETI
FLASH1: JB 01H,FLASH2
MOV 72H,7AH
MOV 73H,7AH
MOV 74H,78H
MOV 75H,79H
AJMP INTT1OUT
ORG 002BH
RETI
;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;; 主 程Байду номын сангаас序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
START: MOV R0, #70H
MOV R7, #0BH
MOV 20H, #00H
CLR F0
MOV P1,#0FFH ;关显示
LJMP STAR1
;
FUN00:MOV A,#0FEH
FUN000:MOV P1,A
LCALL DL05S
JNB ACC.7,OUT
RL A
AJMP FUN000
OUT: RET
;
FUN11:MOV A,#0FEH
FUN111:MOV P1,A
LCALL DL05S
;
INTT0: PUSH ACC
PUSH PSW
CLR ET0
CLR TR0
MOV A,#0B7H ;中断同步修正
ADD A,TL0
MOV TL0,A
MOV A,#3CH
ADD A,TH0
MOV TH0,A
SETB TR0
DJNZ R4, OUTT0
ADDSS: MOV R4,#14H
MOV R0,#71H
RET
DL10MS:MOV R3,#14H
LOOP2: LCALL DL512
DJNZ R3,LOOP2
RET
DL05S:MOV R4,#0AH
LOOP3: LCALL DL10MS
DJNZ R4,LOOP3
RET
DL30S:MOV R5,#03H
LOOP4:LCALL DL05S
DJNZ R5,LOOP4
;
SETMM: cLR ET0
CLR TR0
LCALL DL1S
JB P3.7,CLOSEDIS
MOV R2,#06H
SETB ET1
SETB TR1
SET2: JNB P3.7,SET1
SETB 00H
SET4: JB P3.7,SET3
LCALL DL05S
JNB P3.7,SETHH
MOV R0,#77H ;加1分程序
;; 中断入口程序 ;;
;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
;
ORG 0000H
LJMP START
ORG 0003H
RETI
ORG 000BH
LJMP INTT0
ORG 0013H
RETI
ORG 001BH
LJMP INTT1