鲁班锁图解大全
16种孔明锁鲁班锁解法

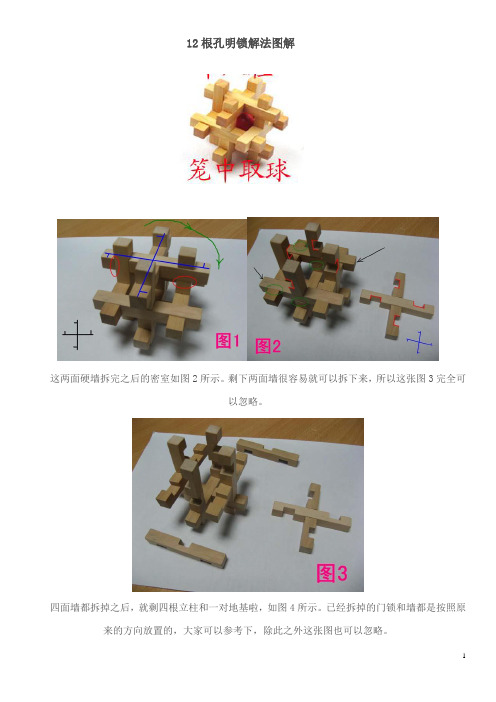
12根孔明锁解法图解这两面硬墙拆完之后的密室如图2所示。
剩下两面墙很容易就可以拆下来,所以这张图3完全可以忽略。
四面墙都拆掉之后,就剩四根立柱和一对地基啦,如图4所示。
已经拆掉的门锁和墙都是按照原来的方向放置的,大家可以参考下,除此之外这张图也可以忽略。
现在大家应该已经将整个密室破坏掉了吧。
下面该进行建设性的工作了。
在盖房子之前我们首先要了解一下所用的材料——木条。
如图5所示,这十二根木条其实只有三种形状(蓝框所圈,是不是觉得一下子简单很多啊),每根木条有三个凹槽,最后房子盖好时这些凹槽全部都要跟其它木条的凹槽咬合上。
对于我们盖密室来说,这十二根木条可分三类(图5红框所示),最左边一对对称的木条作为十字门锁,中间两对有一半是对称的木条用来做柱子,这半截对称的部分正好跟门锁咬合上,所以安装的时候注意凹槽方向要一致,剩下半截全部一样的部分用来跟地基咬合,具体安装方式参考前面几张图即可,我就不啰嗦了。
至于剩下六根,就是地基和墙了,这部分工作完全没有技术含量,需要的话参考上面的图即可,因为整个过程是可逆的,怎么拆就怎么装。
在最后封上密室大门之前,你还可以放点小东西进去,这样如果有人想要把它拿出来可就要费点脑筋了。
当然你也可以放一个六根的孔明锁进去。
鲁班球解法图零件图中阴影部分表示低半个厚度。
拼装次序请自己摸索。
(最后,把零件1在零件4的A槽中滑向中心即完成拼装。
)有的产品零件1的左右之间的“连杆”是根“八棱柱”,相应地零件4的A槽也缩短一半。
最后,零件1依靠其“八棱柱”在零件4的A槽中“就地翻滚”锁定整个球。
安装方法十八根大菠萝解法图大三通解法图六根孔明锁解法图图3 图4图5 图6取钢珠解法神龙摆尾解法图梅花锁解法小九通潜伏解法心心相映八面玲珑24锁连锁六块拼41。
16种孔明锁鲁班锁解法

12根孔明锁解法图解这两面硬墙拆完之后的密室如图2所示。
剩下两面墙很容易就可以拆下来,所以这张图3完全可以忽略。
四面墙都拆掉之后,就剩四根立柱和一对地基啦,如图4所示。
已经拆掉的门锁和墙都是按照原来的方向放置的,大家可以参考下,除此之外这张图也可以忽略。
现在大家应该已经将整个密室破坏掉了吧。
下面该进行建设性的工作了。
在盖房子之前我们首先要了解一下所用的材料——木条。
如图5所示,这十二根木条其实只有三种形状(蓝框所圈,是不是觉得一下子简单很多啊),每根木条有三个凹槽,最后房子盖好时这些凹槽全部都要跟其它木条的凹槽咬合上。
对于我们盖密室来说,这十二根木条可分三类(图5红框所示),最左边一对对称的木条作为十字门锁,中间两对有一半是对称的木条用来做柱子,这半截对称的部分正好跟门锁咬合上,所以安装的时候注意凹槽方向要一致,剩下半截全部一样的部分用来跟地基咬合,具体安装方式参考前面几张图即可,我就不啰嗦了。
至于剩下六根,就是地基和墙了,这部分工作完全没有技术含量,需要的话参考上面的图即可,因为整个过程是可逆的,怎么拆就怎么装。
在最后封上密室大门之前,你还可以放点小东西进去,这样如果有人想要把它拿出来可就要费点脑筋了。
当然你也可以放一个六根的孔明锁进去。
鲁班球解法图零件图中阴影部分表示低半个厚度。
拼装次序请自己摸索。
(最后,把零件1在零件4的A槽中滑向中心即完成拼装。
)有的产品零件1的左右之间的“连杆”是根“八棱柱”,相应地零件4的A槽也缩短一半。
最后,零件1依靠其“八棱柱”在零件4的A槽中“就地翻滚”锁定整个球。
安装方法十八根大菠萝解法图大三通解法图六根孔明锁解法图图3 图4图5 图6取钢珠解法神龙摆尾解法图梅花锁解法小九通潜伏解法心心相映八面玲珑24锁连锁六块拼。
多柱鲁班锁100例之四(52#——60#)
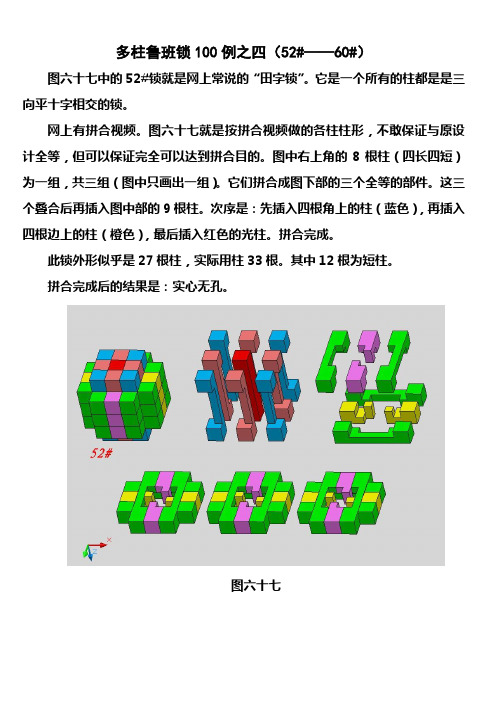
多柱鲁班锁100例之四(52#——60#)图六十七中的52#锁就是网上常说的“田字锁”。
它是一个所有的柱都是是三向平十字相交的锁。
网上有拼合视频。
图六十七就是按拼合视频做的各柱柱形,不敢保证与原设计全等,但可以保证完全可以达到拼合目的。
图中右上角的8根柱(四长四短)为一组,共三组(图中只画出一组)。
它们拼合成图下部的三个全等的部件。
这三个叠合后再插入图中部的9根柱。
次序是:先插入四根角上的柱(蓝色),再插入四根边上的柱(橙色),最后插入红色的光柱。
拼合完成。
此锁外形似乎是27根柱,实际用柱33根。
其中12根为短柱。
拼合完成后的结果是:实心无孔。
图六十七图六十八中的53#锁就是52#锁去掉6个面中间的一个小立方块而成。
所以完全可以采用52#锁的拼合方法,唯一改动的就是中间一层的8柱组去掉一个小立方块后变成图中右下角的形状,直接将它们合并为4根柱(2淡蓝,2淡绿)。
这个锁就成了29柱。
拼合过程完全同52#锁。
图六十八图六十九中的54#锁就是27#锁的中间在加入一个3柱锁。
拼合方法基本同27#锁。
只须注意2点:1.中间3柱拼合完成后,再在外围拼合12柱。
.2.外围的12柱要将黄色柱的转轴安排在离中间最远的位置,即将图中绿色柱的上下向的槽开在两端,并将向外放置绿色柱相背放置。
图六十九图七十中的中的55#锁与52#锁外形完全相同。
不过它是使用了所谓三分块的结构方案。
所以将它又给了一个编号。
它的拆卸过程如图七十:图七十拆卸过程1.最上层的3根黄色柱和蓝绿蓝3柱上移三分之一个柱宽。
如图七十中的“1”。
这时至少须有孔45个单位,(一个单位是三分之一个柱宽的立方)。
2.移出4蓝4黄等8根柱。
如图七十中的“2”。
3.中层的黄色柱和绿色柱上移三分之一个柱宽,移出2蓝2黄等4根柱。
如图七十中的“5”。
4.余下的15根柱就可以简单拆开。
拼合过程反向操作。
27根柱形见图七十一。
52#和55#的设计方案比较:与52#方案相比55#的设计方案差很多。
孔明锁图解大全图解多种孔明锁鲁班锁详细解法可打印
孔明锁图解大全图解多种孔明锁鲁班锁详细解法可打印鲁班锁6根解法12根孔明锁解法图解这两面硬墙拆完之后的密室如图2所示。
剩下两面墙很容易就可以拆下来,所以这张图3完全可以忽略。
四面墙都拆掉之后,就剩四根立柱和一对地基啦,如图4所示。
已经拆掉的门锁和墙都是按照原来的方向放置的,大家可以参考下,除此之外这张图也可以忽略。
现在大家应该已经将整个密室破坏掉了吧。
下面该进行建设性的工作了。
在盖房子之前我们首先要了解一下所用的材料——木条。
如图5所示,这十二根木条其实只有三种形状(蓝框所圈,是不是觉得一下子简单很多啊),每根木条有三个凹槽,最后房子盖好时这些凹槽全部都要跟其它木条的凹槽咬合上。
对于我们盖密室来说,这十二根木条可分三类(图5红框所示),最左边一对对称的木条作为十字门锁,中间两对有一半是对称的木条用来做柱子,这半截对称的部分正好跟门锁咬合上,所以安装的时候注意凹槽方向要一致,剩下半截全部一样的部分用来跟地基咬合,具体安装方式参考前面几张图即可,我就不啰嗦了。
至于剩下六根,就是地基和墙了,这部分工作完全没有技术含量,需要的话参考上面的图即可,因为整个过程是可逆的,怎么拆就怎么装。
在最后封上密室大门之前,你还可以放点小东西进去,这样如果有人想要把它拿出来可就要费点脑筋了。
当然你也可以放一个六根的孔明锁进去。
鲁班球解法图零件图中阴影部分表示低半个厚度。
拼装次序请自己摸索。
(最后,把零件1在零件4的A槽中滑向中心即完成拼装。
)有的产品零件1的左右之间的“连杆”是根“八棱柱”,相应地零件4的A 槽也缩短一半。
最后,零件1依靠其“八棱柱”在零件4的A槽中“就地翻滚”锁定整个球。
安装方法十八根大菠萝解法图大三通解法图六根孔明锁解法图图3 图4 图5 图6取钢珠解法神龙摆尾解法图梅花锁解法小九通潜伏解法心心相映八面玲珑24锁。
各类孔明锁解法汇总

网传各类孔明锁解法汇总神龙摆尾解法图六根孔明锁解法图图3 图4图5 图612根孔明锁解法图解首先,被六根孔明锁折磨过的朋友大可放宽心,因为十二根的反而简单些,我们今天要说的十二根孔明锁比6根的要简单,简单到5张图就可以教会你拆装这种看起来有点古怪的小东西,说是5张图其实只有第1、2、5三张比较重要,其它两张可有可无的。
因为我拿到这小东西的时候对它完全没有概念,所以我就按照我一点一点认识它的过程来讲,这样就完全不需要记口诀背公式,只要稍稍动脑子想一下一切就水到渠成了。
我会尽量说得清楚些,有问题的朋友可以留言。
只需要关键提示的朋友如果觉得文字太多,可以直接看图和黑体部分的文字。
当然,就像故事当中的主角开始总要走点弯路一样,挨个晃过12根木条之后,你会发现这里面不存在可以单独拆下来的一根(六根孔明锁有那么一根)。
不过不用担心,一根不行我们来试试两根,因为之前无数人的尝试告诉我们,这个密室一定是可以打开的。
这两面硬墙拆完之后的密室如图2所示。
剩下两面墙很容易就可以拆下来,所以这张图3完全可以忽略。
四面墙都拆掉之后,就剩四根立柱和一对地基啦,如图4所示。
已经拆掉的门锁和墙都是按照原来的方向放置的,大家可以参考下,除此之外这张图也可以忽略。
现在大家应该已经将整个密室破坏掉了吧。
下面该进行建设性的工作了。
在盖房子之前我们首先要了解一下所用的材料——木条。
如图5所示,这十二根木条其实只有三种形状(蓝框所圈,是不是觉得一下子简单很多啊),每根木条有三个凹槽,最后房子盖好时这些凹槽全部都要跟其它木条的凹槽咬合上。
对于我们盖密室来说,这十二根木条可分三类(图5红框所示),最左边一对对称的木条作为十字门锁,中间两对有一半是对称的木条用来做柱子,这半截对称的部分正好跟门锁咬合上,所以安装的时候注意凹槽方向要一致,剩下半截全部一样的部分用来跟地基咬合,具体安装方式参考前面几张图即可,我就不啰嗦了。
至于剩下六根,就是地基和墙了,这部分工作完全没有技术含量,需要的话参考上面的图即可,因为整个过程是可逆的,怎么拆就怎么装。
鲁班锁(孔明锁)图解大全

鲁班锁(孔明锁)图解大全孔明锁,也叫八卦锁、鲁班锁,是中国古代汉族传统的土木建筑固定结合器,民间还有“别闷棍”“六子联方”“莫奈何”“难人木”等叫法。
不用钉子和绳子,完全靠自身结构的连接支撑,就像一张纸对折一下就能够立得起来,展现了一种看似简单,却凝结着不平凡的智慧。
许多人都为孔明锁的解法头疼不已,接下来小编就介绍孔明锁的解法。
来历传说春秋时代,鲁国工匠鲁班为了测试儿子是否聪明,用6根木条制作一件可拼可拆的玩具,叫儿子拆开,儿子忙碌了一夜,终于拆开了。
这种玩具后人称作鲁班锁,鲁班锁既称空明锁、别闷棍、六子联芳、莫奈何、难人才、智慧木等,它起源于中国古代建筑中首创的榫卯结构。
又有一说鲁班锁又称孔明锁相传由三国时期的诸葛亮发明。
其内部的凹凸部分啮合,十分巧妙,形状和内部的构造各不相同,一般都是易拆难装。
六根孔明锁图解解法解法:拆解顺序实际上与解法1相同,从块件A开始,然后依次拆解块件C 、E、B、D,最后只剩下块件F。
细心观察不难发现,解法一和解法二中的孔明锁初始的装配顺序不一样,所以要把它们分为两种不同解法。
1、孔明锁拆开后的基本结构:常见的六柱孔明锁由这六根木条的组装而成,上图第一行是朝上摆放的各块件,第二行是朝下摆放的各块件。
第一根是完全实心的木条。
2、六柱孔明锁的各块件编号3、第一种解法:上图是第一种拆解孔明锁的方法——按照先后顺序,从块件A开始,然后依次拆解块件C 、E、B、D,最后只剩下块件F,这样就可以拆解孔明锁了。
4、第二种解法:拆解顺序实际上与解法1相同,从块件A开始,然后依次拆解块件C 、E、B、D,最后只剩下块件F。
细心观察不难发现,解法一和解法二中的孔明锁初始的装配顺序不一样,所以要把它们分为两种不同解法。
六根孔明锁图解

传说春秋时代,鲁国工匠鲁班为了测试儿子是否聪明,用6根木条制作一件可拼可拆的玩具,叫儿子拆开,儿子忙碌了一夜,终于拆开了。
这种玩具后人称作鲁班锁,鲁班锁既称空明锁、别闷棍、六子联芳、莫奈何、难人才、智慧木等,它起源于中国古代建筑中首创的榫卯结构。
又有一说鲁班锁又称孔明锁相传由三国时期的诸葛亮发明。
其内部的凹凸部分啮合,十分巧妙,形状和内部的构造各不相同,一般都是易拆难装。
其中一种孔明锁,解法如下:
古中国、古印度、古埃及和古巴比伦。
孔明锁图解

孔明锁也是中国传统的智力玩具,相传由三国时期的诸葛亮发明。
由于本人的老师也是他,所以这种三维的拼插玩具内部的凹凸部分啮合,十分巧妙。
孔明锁类玩具比较多,形状和内部的构造各不相同,一般都是易拆难装。
拼装时需要仔细观察,认真思考,分析其内部结构。
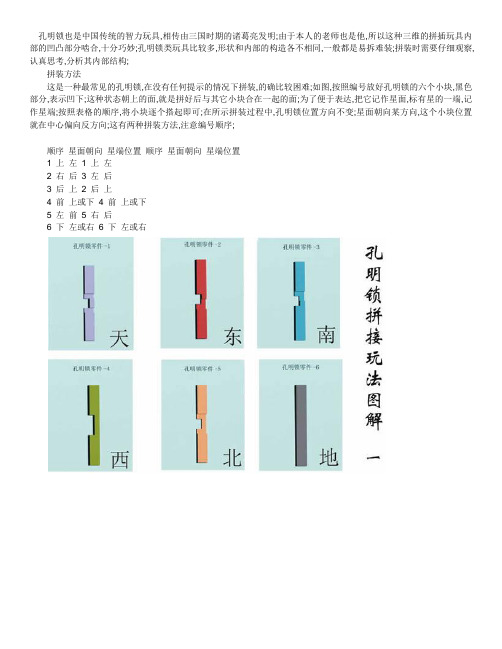
拼装方法这是一种最常见的孔明锁,在没有任何提示的情况下拼装,的确比较困难。
如图,按照编号放好孔明锁的六个小块,黑色部分,表示凹下。
这种状态朝上的面,就是拼好后与其它小块合在一起的面。
为了便于表达,把它记作星面,标有星的一端,记作星端。
按照表格的顺序,将小块逐个搭起即可。
在所示拼装过程中,孔明锁位置方向不变。
星面朝向某方向,这个小块位置就在中心偏向反方向。
这有两种拼装方法,注意编号顺序。
顺序星面朝向星端位置顺序星面朝向星端位置1 上左 1 上左2 右后3 左后3 后上 2 后上4 前上或下 4 前上或下5 左前 5 右后6 下左或右 6 下左或右鲁班锁孔明锁 6块图解6块孔明锁鲁班锁鲁班球图解教程18块孔明锁鲁班锁图解两种不同形状的配件,玩的时候一定要注意区分这里扭转了方向,请留意照片上的变化孔明锁孔明锁,也叫八卦锁,是中国传统的智力玩具,相传由三国时期的诸葛亮发明。
这种三维的拼插玩具内部的凹凸部分(即榫卯结构)啮合,十分巧妙。
孔明锁类玩具比较多,形状和内部的构造各不相同,一般都是易拆难装。
拼装时需要仔细观察,认真思考,分析其内部结构。
在没有钉子绳子的情况下,你能将六根木条交叉固定在一起吗?两千多年前的孔明就发明了一种方法,用一种咬合的方式把三组木条垂直相交固定,这种咬合在建筑上被广泛应用,在民间人们把孔明的这种发明制成了一种玩具——孔明锁。
原创为木质结构,外观看是严丝合缝的十字立方体,动动脑筋可拆解,装上可不是那么容易的。
解开孔明锁重现远古智慧,别让古人留给我们的财富在我们这一代人手中丢失。
孔明锁,相传是三国时期诸葛孔明根据八卦玄学的原理发明的一种玩具,曾广泛流传于民间。
16种孔明锁鲁班锁法
12根孔明锁解法图解这两面硬墙拆完之后的密室如图2所示。
剩下两面墙很容易就可以拆下来,所以这张图3完全可以忽略。
四面墙都拆掉之后,就剩四根立柱和一对地基啦,如图4所示。
已经拆掉的门锁和墙都是按照原来的方向放置的,大家可以参考下,除此之外这张图也可以忽略。
现在大家应该已经将整个密室破坏掉了吧。
下面该进行建设性的工作了。
在盖房子之前我们首先要了解一下所用的材料——木条。
如图5所示,这十二根木条其实只有三种形状(蓝框所圈,是不是觉得一下子简单很多啊),每根木条有三个凹槽,最后房子盖好时这些凹槽全部都要跟其它木条的凹槽咬合上。
对于我们盖密室来说,这十二根木条可分三类(图5红框所示),最左边一对对称的木条作为十字门锁,中间两对有一半是对称的木条用来做柱子,这半截对称的部分正好跟门锁咬合上,所以安装的时候注意凹槽方向要一致,剩下半截全部一样的部分用来跟地基咬合,具体安装方式参考前面几张图即可,我就不啰嗦了。
至于剩下六根,就是地基和墙了,这部分工作完全没有技术含量,需要的话参考上面的图即可,因为整个过程是可逆的,怎么拆就怎么装。
在最后封上密室大门之前,你还可以放点小东西进去,这样如果有人想要把它拿出来可就要费点脑筋了。
当然你也可以放一个六根的孔明锁进去。
鲁班球解法图零件图中阴影部分表示低半个厚度。
拼装次序请自己摸索。
(最后,把零件1在零件4的A槽中滑向中心即完成拼装。
)有的产品零件1的左右之间的“连杆”是根“八棱柱”,相应地零件4的A槽也缩短一半。
最后,零件1依靠其“八棱柱”在零件4的A槽中“就地翻滚”锁定整个球。
安装方法十八根大菠萝解法图大三通解法图六根孔明锁解法图图3 图4图5 图6取钢珠解法神龙摆尾解法图梅花锁解法小九通潜伏解法心心相映八面玲珑24锁连锁六块拼41。
孔明锁图解
孔明锁也是中国传统的智力玩具,相传由三国时期的诸葛亮发明;由于本人的老师也是他,所以这种三维的拼插玩具内部的凹凸部分啮合,十分巧妙;孔明锁类玩具比较多,形状和内部的构造各不相同,一般都是易拆难装;拼装时需要仔细观察,认真思考,分析其内部结构;拼装方法这是一种最常见的孔明锁,在没有任何提示的情况下拼装,的确比较困难;如图,按照编号放好孔明锁的六个小块,黑色部分,表示凹下;这种状态朝上的面,就是拼好后与其它小块合在一起的面;为了便于表达,把它记作星面,标有星的一端,记作星端;按照表格的顺序,将小块逐个搭起即可;在所示拼装过程中,孔明锁位置方向不变;星面朝向某方向,这个小块位置就在中心偏向反方向;这有两种拼装方法,注意编号顺序;顺序星面朝向星端位置顺序星面朝向星端位置1 上左1 上左2 右后3 左后3 后上2 后上4 前上或下4 前上或下5 左前5 右后6 下左或右6 下左或右鲁班锁孔明锁6块图解鲁班球图解教程18块孔明锁鲁班锁图解两种不同形状的配件,玩的时候一定要注意区分这里扭转了方向,请留意照片上的变化孔明锁孔明锁,也叫八卦锁,是中国传统的智力玩具,相传由三国时期的诸葛亮发明;这种三维的拼插玩具内部的凹凸部分即榫卯结构啮合,十分巧妙;孔明锁类玩具比较多,形状和内部的构造各不相同,一般都是易拆难装;拼装时需要仔细观察,认真思考,分析其内部结构;在没有钉子绳子的情况下,你能将六根木条交叉固定在一起吗两千多年前的孔明就发明了一种方法,用一种咬合的方式把三组木条垂直相交固定,这种咬合在建筑上被广泛应用,在民间人们把孔明的这种发明制成了一种玩具——孔明锁;原创为木质结构,外观看是严丝合缝的十字立方体,动动脑筋可拆解,装上可不是那么容易的;解开孔明锁重现远古智慧,别让古人留给我们的财富在我们这一代人手中丢失;孔明锁,相传是三国时期诸葛孔明根据八卦玄学的原理发明的一种玩具,曾广泛流传于民间;近年来又逐渐得到人们的重视,它对放松身心,开发大脑,灵活手指均有好处,是老少皆宜的休闲玩具;孔明锁看上去简单,其实内中奥妙无穷,不得要领,很难完成拼合;这只是传说之一;另外一种传说是:传说春秋时代鲁国工匠鲁班为了测试儿子是否聪明,用6根木条制作一件可拼可拆的玩具,叫儿子拆开.儿子忙碌了一夜,终于拆开了.这种玩具后人就称作鲁班锁.其实这只是一种传说.它起源于中国古代建筑中首创的榫卯结构.所以,孔明锁亦称鲁班锁、别闷棍、六子联方、莫奈何、难人木等;。
鲁班锁图解大全
鲁班锁图解⼤全根解法,我想要详细的说明,是6根孔明锁。
孔明锁6下⾯就是孔明锁形状和内部的构造各不相同,孔明锁内部的凹凸部分啮合,⼗分巧妙,根解法:66年前某⼀⾼智商师兄曾于⼩摊上购得(商贩语)。
10孔明锁,号称⽊制玩具中最难者颇伤⾃尊。
教研室中颇具说可以组成⼗字架云云。
于尝试半⼩时之久未得要领,根⼩⽊棍,⼈才,⼀机械专业⽼师拿去赏玩,两⽇得解。
知,此劳什⼦⾮想象之劳什⼦也。
因假好学,在校时并未再尝试之。
后成家,携妻逛⾩成门之万通,⼜见此物,因其价廉,购之。
回家饭毕,卧床上试解之。
因有前车之鉴,仿庖丁解⽜状,未曾轻易动作。
于观察良久,发现其机⼩时已过。
⼀晃数年已过,前⼏⽇复⼜赏玩,半⼩时毕。
看来,记巧处,终得解。
看表,3 DC解法,以备忘。
忆推理之功能尚在。
因解法颇有些繁琐,故现在市⾯上有⼀种另外的简版孔明锁,其中⼀个部件是纯正的长⽅体,由于这个解法相对简单,不在此列。
该解法关键点,是如何组成⼀个⽅的空洞,让这个长⽅体可以插进去。
仔细观察,即可得解。
结合⼋卦⽞学的原理发明的⼀种玩相传是三国时期诸葛孔明根据鲁班的发明,孔明锁,六⼦”““别闷棍具,曾⼴泛流传于民间。
是中国古代传统的⼟⽊建筑固定结合器,民间还有等叫法。
不⽤钉⼦和绳⼦,完全靠⾃⾝结构的连接⽀撑,就像⼀张难⼈⽊”联⽅”“莫奈何”“纸对折⼀下就能够⽴得起来,展现了⼀种看似简单,却凝结着不平凡的智慧。
是因为还有⼀种说法是该⼯具是古代⽊匠鲁班发明,所孔明锁,也叫⼋卦锁、鲁班锁。
以有鲁班锁⼀称。
就是拼好表⽰凹下。
这种状态朝上的⾯,按照编号放好孔明锁的六个⼩块,⿊⾊部分,后与其它⼩块合在⼀起的⾯。
为了便于表达,把它记作星⾯,标有星的⼀端,记作星端。
按星⾯朝向将⼩块逐个搭起即可。
在所⽰拼装过程中,孔明锁位置⽅向不变。
照表格的顺序,某⽅向,这个⼩块位置就在中⼼偏向反⽅向。
这有两种拼装⽅法,注意编号顺序。
安装过程说明:1 / 5“2”根的安装如下图⼆所⽰,注意中间凸出来的部分放置在右边,将“1”第1根与第2锯割得少⼀些(也即完整部分长⼀些)的⼀头放左边。
21种孔明锁的拼装方法

01.二十四锁 难度:★★★★★
01.大菠萝 难度:★★★★★
THANK YOU
PPT制作时间:2022年1月7日
【素材来源】 1.奇艺玩具孔明锁15件套游戏说明 2.新苗优咔兔鲁班锁游戏说明
01.笼中取珠 难度:★★
组装重点: 1.先用1个A柱和1个B柱组成6个如右图第二步的十字 形,十字形的缺口方向是一致的; 2.右图第五步中,B柱的缺口方向应是一致的。
01.井字锁 难度:★★★
01.孔明球 难度:★★★
01.梅花锁 难度:★★★
01.六通 难度:★★★
01.小九通 难度:★★★
01.笼中取物 难度:★★★
注意:右图第一步左右各有2个A柱(一共4个)
01.封锁 难度:★★★
01.十二姐妹 难度:★★★
01.心锁 难度:★★★
01.九根 难度:★★★
01.小菠萝 难度:★★★★
01.十四根 难度:★★★★
01.十八罗汉 பைடு நூலகம்度:★★★★
组装重点: 1.B柱是只有一端有凸起的立柱,而且只有右图中第14步 (最后一步)时才使用B柱,其他步骤都是A柱; 2.建议在一个平稳的桌面上组装,在组装过程中要小心, 尤其是前几步时模型非常容易散架。
21种孔明锁的拼装方法
01.三通(大三通) 难度:★
01.好汉锁 难度:★★
01.鲁班球 难度:★★
01.六方宝石 难度:★★
组装重点: 1.图2的旋转方向与图1是相 反的; 2.第三步时要保证图1和图2 两个形状的完整。
01.足球锁 难度:★★
组装重点: 1.图2的旋转方向与图1是相 反的; 2.第三步时要保证图1和图2 两个形状的完整。
六根孔明锁图解
传说春秋时代,鲁国工匠鲁班为了测试儿子是否聪明,用6根木条制作一件可拼可拆的玩具,叫儿子拆开,儿子忙碌了一夜,终于拆开了。
这种玩具后人称作鲁班锁,鲁班锁既称空明锁、别闷棍、六子联芳、莫奈何、难人才、智慧木等,它起源于中国古代建筑中首创的榫卯结构。
又有一说鲁班锁又称孔明锁相传由三国时期的诸葛亮发明。
其内部的凹凸部分啮合,十分巧妙,形状和内部的构造各不相同,一般都是易拆难装。
其中一种孔明锁,解法如下:
古中国、古印度、古埃及和古巴比伦。
13种孔明锁拆装之欧阳索引创编

孔明锁的解法图解欧阳家百(2021.03.07)14根孔明锁(井字锁)的解法图解112根孔明锁解法图解46根鲁班锁解法751柱鲁班锁大菠萝组装步骤图8心型孔明锁解法图解18鲁班球解法图22十八根解法图2333根大菠萝解法图24大三通解法图27六根孔明锁解法图27取钢珠解法28神龙摆尾解法图31梅花锁解法3114根孔明锁(井字锁)解法图解14根孔明锁(也叫井字锁)的玩法,井字锁是传统孔明锁非常有代表性的一个变种,现将它的拆装方法整理如下:12根孔明锁解法图解首先,被六根孔明锁折磨过的朋友大可放宽心,因为十二根的反而简单些,我们今天要说的十二根孔明锁比6根的要简单,简单到5张图就可以教会你拆装这种看起来有点古怪的小东西,说是5张图其实只有第1、2、5三张比较重要,其它两张可有可无的。
因为我拿到这小东西的时候对它完全没有概念,所以我就按照我一点一点认识它的过程来讲,这样就完全不需要记口诀背公式,只要稍稍动脑子想一下一切就水到渠成了。
我会尽量说得清楚些,有问题的朋友可以留言。
只需要关键提示的朋友如果觉得文字太多,可以直接看图和黑体部分的文字。
当然,就像故事当中的主角开始总要走点弯路一样,挨个晃过12根木条之后,你会发现这里面不存在可以单独拆下来的一根(六根孔明锁有那么一根)。
不过不用担心,一根不行我们来试试两根,因为之前无数人的尝试告诉我们,这个密室一定是可以打开的。
这两面硬墙拆完之后的密室如图2所示。
剩下两面墙很容易就可以拆下来,所以这张图3完全可以忽略。
四面墙都拆掉之后,就剩四根立柱和一对地基啦,如图4所示。
已经拆掉的门锁和墙都是按照原来的方向放置的,大家可以参考下,除此之外这张图也可以忽略。
现在大家应该已经将整个密室破坏掉了吧。
下面该进行建设性的工作了。
在盖房子之前我们首先要了解一下所用的材料——木条。
如图5所示,这十二根木条其实只有三种形状(蓝框所圈,是不是觉得一下子简单很多啊),每根木条有三个凹槽,最后房子盖好时这些凹槽全部都要跟其它木条的凹槽咬合上。
孔明锁图解大全图解多种孔明锁鲁班锁详细解法可打印
孔明锁图解大全图解多种孔明锁鲁班锁详细解法可打印鲁班锁6根解法12根孔明锁解法图解这两面硬墙拆完之后的密室如图2所示。
剩下两面墙很容易就可以拆下来,所以这张图3完全可以忽略。
四面墙都拆掉之后,就剩四根立柱和一对地基啦,如图4所示。
已经拆掉的门锁和墙都是按照原来的方向放置的,大家可以参考下,除此之外这张图也可以忽略。
现在大家应该已经将整个密室破坏掉了吧。
下面该进行建设性的工作了。
在盖房子之前我们首先要了解一下所用的材料——木条。
如图5所示,这十二根木条其实只有三种形状(蓝框所圈,是不是觉得一下子简单很多啊),每根木条有三个凹槽,最后房子盖好时这些凹槽全部都要跟其它木条的凹槽咬合上。
对于我们盖密室来说,这十二根木条可分三类(图5红框所示),最左边一对对称的木条作为十字门锁,中间两对有一半是对称的木条用来做柱子,这半截对称的部分正好跟门锁咬合上,所以安装的时候注意凹槽方向要一致,剩下半截全部一样的部分用来跟地基咬合,具体安装方式参考前面几张图即可,我就不啰嗦了。
至于剩下六根,就是地基和墙了,这部分工作完全没有技术含量,需要的话参考上面的图即可,因为整个过程是可逆的,怎么拆就怎么装。
在最后封上密室大门之前,你还可以放点小东西进去,这样如果有人想要把它拿出来可就要费点脑筋了。
当然你也可以放一个六根的孔明锁进去。
鲁班球解法图零件图中阴影部分表示低半个厚度。
拼装次序请自己摸索。
(最后,把零件1在零件4的A槽中滑向中心即完成拼装。
)有的产品零件1的左右之间的“连杆”是根“八棱柱”,相应地零件4的A 槽也缩短一半。
最后,零件1依靠其“八棱柱”在零件4的A槽中“就地翻滚”锁定整个球。
安装方法十八根大菠萝解法图大三通解法图六根孔明锁解法图图3 图4 图5 图6取钢珠解法神龙摆尾解法图梅花锁解法小九通潜伏解法心心相映八面玲珑24锁。
各类孔明锁解法汇总

网传各类孔明锁解法汇总神龙摆尾解法图六根孔明锁解法图图3 图4 图5 图612根孔明锁解法图解首先,被六根孔明锁折磨过的朋友大可放宽心,因为十二根的反而简单些,我们今天要说的十二根孔明锁比6根的要简单,简单到5张图就可以教会你拆装这种看起来有点古怪的小东西,说是5张图其实只有第1、2、5三张比较重要,其它两张可有可无的。
因为我拿到这小东西的时候对它完全没有概念,所以我就按照我一点一点认识它的过程来讲,这样就完全不需要记口诀背公式,只要稍稍动脑子想一下一切就水到渠成了。
我会尽量说得清楚些,有问题的朋友可以留言。
只需要关键提示的朋友如果觉得文字太多,可以直接看图和黑体部分的文字。
当然,就像故事当中的主角开始总要走点弯路一样,挨个晃过12根木条之后,你会发现这里面不存在可以单独拆下来的一根(六根孔明锁有那么一根)。
不过不用担心,一根不行我们来试试两根,因为之前无数人的尝试告诉我们,这个密室一定是可以打开的。
这两面硬墙拆完之后的密室如图2所示。
剩下两面墙很容易就可以拆下来,所以这张图3完全可以忽略。
四面墙都拆掉之后,就剩四根立柱和一对地基啦,如图4所示。
已经拆掉的门锁和墙都是按照原来的方向放置的,大家可以参考下,除此之外这张图也可以忽略。
现在大家应该已经将整个密室破坏掉了吧。
下面该进行建设性的工作了。
在盖房子之前我们首先要了解一下所用的材料——木条。
如图5所示,这十二根木条其实只有三种形状(蓝框所圈,是不是觉得一下子简单很多啊),每根木条有三个凹槽,最后房子盖好时这些凹槽全部都要跟其它木条的凹槽咬合上。
对于我们盖密室来说,这十二根木条可分三类(图5红框所示),最左边一对对称的木条作为十字门锁,中间两对有一半是对称的木条用来做柱子,这半截对称的部分正好跟门锁咬合上,所以安装的时候注意凹槽方向要一致,剩下半截全部一样的部分用来跟地基咬合,具体安装方式参考前面几张图即可,我就不啰嗦了。
至于剩下六根,就是地基和墙了,这部分工作完全没有技术含量,需要的话参考上面的图即可,因为整个过程是可逆的,怎么拆就怎么装。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
鲁班锁图解大全
Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
孔明锁6根解法,我想要详细的说明,是6根孔明锁。
孔明锁内部的凹凸部分啮合,十分巧妙,形状和内部的构造各不相同,下面就是孔明锁6根解法:
孔明锁,号称木制玩具中最难者(商贩语)。
10年前某一高智商师兄曾于小摊上购得6根小木棍,说可以组成十字架云云。
于尝试半小时之久未得要领,颇伤自尊。
教研室中颇具人才,一机械专业老师拿去赏玩,两日得解。
知,此劳什子非想象之劳什子也。
因假好学,在校时并未再尝试之。
后成家,携妻逛阜成门之万通,又见此物,因其价廉,购之。
回家饭毕,卧床上试解之。
因有前车之鉴,仿庖丁解牛状,未曾轻易动作。
于观察良久,发现其机巧处,终得解。
看表,3小时已过。
一晃数年已过,前几日复又赏玩,半小时毕。
看来,记忆推理之功能尚在。
因解法颇有些繁琐,故DC解法,以备忘。
现在市面上有一种另外的简版孔明锁,其中一个部件是纯正的长方体,由于这个解法相对简单,不在此列。
该解法关键点,是如何组成一个方的空洞,让这个长方体可以插进去。
仔细观察,即可得解。
孔明锁,相传是三国时期诸葛孔明根据鲁班的发明,结合八卦玄学的原理发明的一种玩具,曾广泛流传于民间。
是中国古代传统的土木建筑固定结合器,民间还有“别闷棍”“六子联方”“莫奈何”“难人木”等叫法。
不用钉子和绳子,完全靠自身结构的连接支撑,就像一张纸对折一下就能够立得起来,展现了一种看似简单,却凝结着不平凡的智慧。
孔明锁,也叫八卦锁、鲁班锁。
是因为还有一种说法是该工具是古代木匠鲁班发明,所以有鲁班锁一称。
按照编号放好孔明锁的六个小块,黑色部分,表示凹下。
这种状态朝上的面,就是拼好后与其它小块合在一起的面。
为了便于表达,把它记作星面,标有星的一端,记作星端。
按照表格的顺序,将小块逐个搭起即可。
在所示拼装过程中,孔明锁位置方向不变。
星面朝向某方向,这个小块位置就在中心偏向反方向。
这有两种拼装方法,注意编号顺序。
安装过程说明:
第1根与第2根的安装如下图二所示,注意“1”中间凸出来的部分放置在右边,将“2”锯割得少一些(也即完整部分长一些)的一头放左边。
第3根的安装的方向很重要,要将锯割得多一些(也即完整部分短一些)的一头放上边,如图三所示,如若将锯割得少一些(也即完整部分长一些)的一头放如图所示的上(左)边,则安装出来的成品中“3”柱与“4”柱的上、下长度不相等。
如图四所示。
只要前面三根安装正确,第4根安装很简单,因为它的结构是对称的,只要按如图五所示安装,就可以了。
第5根安装要注意,所示,将第5根木方的“缺口”朝上,安装就正确。
如果是将木方的“缺口”朝下,则安装出来的成品就会使“2”和“5”方对不齐,所示。
只要多安装几次,一般会在20秒钟左右就可以安装成功。
鲁班锁(孔明锁)的计算机分析介绍
锁的拆解
一、拆解动作限定:
一般地,鲁班锁通过手工的“装配”难于“拆解”,相反,在计算机分析中,则“拆解”比“装配”更复杂些。
这是因为在计算机程序中,“装配”是逻辑的,但“拆解”的逻辑过程却最终需要落实物理实现。
对一个“逻辑装配”而成的锁,须由计算机程序对其尝试拆解,如果能够成功找到一个完全拆解方案,则该方案就是一个“解”,如果仅能完成部分拆解,也就是剩下的“块组”无法再继续拆解,那就称这个拆解方案为“部分解”。
并非所有能“逻辑装配”的锁都能顺利拆解。
计算机程序对拆解动作有一定限制:拆解一个块时,块只允许沿三个互相垂直的方向之一移动,每次移动的距离必须是小立方边长的整数倍。
也就是说,不允许朝任意方向移动块,也不允许移动任意距离。
但是,移动时,可以是一块移动,也可以几个块组成一个整体移动。
二、拆解程序的总体思路:
程序对锁的拆解过程,就是不断地对块沿各个方向尝试移动的过程,对每一步移动,程序需判断:能否移动移动几格是否有块或块组分离是否形成部分解程序还得记录跟踪每一步操作后锁的状态,并需穷举全部拆解步骤,才能获取该装配的解的全部情况。
为了使程序能够进行相关操作,需把一个装配锁置于一个三维空间中,并对空间中的块进行定位。
但这样做并不够,因为块的形状千变万化,跟踪一整个块还无法判断块之间在移动时的交互情况,因而需对块进行逻辑分解。
一个长度为6单元的块,按“小立方”为单位,分解成24个区域,包括可切割加工的12个区域和二端固定的12个区域。
程序需追踪这24个立方区域中全体物理存在的“小立方块”,当然“空立方”区域就不必计算了,全体物理小立方块在某个方向上可以移动的值的最小值,就是块在此方向上的可移动距离。
下图画出一个块在三维空间中的情形:
三维空间中一个块的示意图
上图绘制了一个以20单位边长的立方空间,以图中块的左下角处的“小立方”为例,其空间坐标为(X,Y,Z)=(6,6,10)。
当一个装配锁定位到该栅格空间中后,所有小立方将被一一定位,获得唯一的空间坐标。
对应于计算机程序,则设计一个三维数组GRID(x,y,z),数组元素的值表示该栅格由哪个块占据,显见,其取值范围为1-6;对于纯空间(包括整个锁未占据的空间和“有孔锁”内部的孔洞),其数组元素的值为0。
按上述栅格空间的构造,一个块如果在栅格中移动,就相当于数组中对应元素值的改变。
比如1#块的某个“小立方”GRID(5,6,4)=1,即X方向上的第5个栅格、Y方向上的第6栅格、Z方向上的第4栅格,如果此块向X正方向移动一单元,那么就有GRID (6,6,4)=1;
拆解锁时,每移动一步,锁上各块的相互位置就发生变化。
需用一个“状态”来表述这种不同的布局。
在计算机程序里,状态用每个块在每个方向上跟起始状态对比已经移动的数量来表示。
如果把1#块确定为固定位置,那么每个状态就是通过另外剩下的5个块相对于1#块的偏移量来描述,通常就是15个整数。
程序需维持一个“状态”列表,以追踪运行情况。
建立了以上相关数据结构后,整个拆解程序就可以化简为:分析在单个方向上的移动,以及判断这个移动是否使锁从一个状态到达另一个状态。
程序还得区分一个或多个块通过某个移动后从一个“静止块组”中被分离出来,这种分离定义为“部分解”。
关于“分析在单个方向上的移动”,稍后将列出其基本算法。
综合起来说,程序完全地拆解整个锁的过程,就是在不同的方向上、在新的状态下重复执行拆解逻辑的过程;每次一块“块组”被成功拆解,就记录其为一个“子装配”,用于后续分析。