全局最优化算法
全局优化问题的最优性条件及其实现算法

DI NG , C Yi HEN Ja — in W U D n — u G in q a g, o gh a
( o eeo S i cs S ag a U iesy hnh i 0 4 4 C ia C l g f c ne , h nhi nvrt,Sa ga 2 04 , h ) l e i n
1 Ck+l
高 ), d g
( 2 )
() 3
以及 水平 集
月 = { I < / )≤ C , ∈ G} ,
从而 得 到 2个 收 敛序 列 { 和 { } 算 法终 止 条 件 C} , 为水 平集 上 的均方 差趋 近 于 0 .
() 1
个全 局优 化 问题 可表 述如 下 : ( ) mif x =f , P n ()
中意 的数 权 墙 任 点 函值 重
‘
在 本研 究 中 , 为_ ) , 么 , 对任 意点 的 因 厂 > 那 ( 10 若 函数值 ) 予 权 重 f ( ( 为不 小 于 1的 整 赋 )
式 中, D为 R 中的有 界 闭集 ,: R 上 的连 续 函 厂R 一
数, 且对 任 意 ∈ D, 极 大值 . ) 0 为 ) D 中的 总 > I 在
一
c Ln C √ k = ̄ () ≥ O () C 1 u 3
般 地 , C 构 造水平 集 由
=
非空 , 6 的右端表示在 D中满足关系式厂 ≥C 式( ) ( ) 。 的点 的全体 .设 D是 有 界 闭 集 , 若 是 有界 闭集 ,
则 是 R 中的紧集 , 于对 D一 上 的点
)≥ ) , () 4
并 且
H = { l )≥ c , ∈D} / , 集, c 总极 值 , 是 因此 , 可设 ( 0 日 + )> ) c+ , ) , (
一种全局最优化检测融合算法研究

设 分 布式 多 传 感 器 检 测 融 合 系 统 由融合 中 心 及 N 部 传 感 器 构 成 , 图 l所 示 。各 部 传 感 如 器根据 其 观测独 立进 行判 决 , 将判 决 结果 传 送 并
至融合 中心 。用 H。 示 零 假设 ( 有 目标 ) 用 表 没 ,
融 合 算 法
1 引 言
近 年来 分 布 式 多 传 感 器 检 测 融 合 系 统 受 到 了广 泛重 视 L 。 与 传 统 的单 传 感 器 检 测 系 统 l ] 相比, 分布 式 检 测 系 统 具 有 覆 盖 面 积 大 、 靠 性 可 高、 生存能 力强 等 优点 。分 布 式检 测 系统 由融合 中心及 多 部传 感器 构 成 , 系统 性能 由融合 规 则及
a d t es n o e iin r lsmu tb p i zdjity n h e s rd cso ue s eo t e n l.Th lb l p i l u in ag rt m sd rv di hsp p r a d mi o ego a o t so lo i ma f h i eie nt i a e , n
H。 表示 备选 假设 ( 目标 存在 ) 。记 第 k部 传感 器
的观测 量 为 Y , 其 判 决 为 ; 记 U =0表 示 该 传
感器 判 决 H。为 真 , l表 示 判 决 H。为 真 。 U=
由于信道 带 宽及 信道 衰落 等 因素 的 影 响 , 无 线信 道通 常 为非理 想 信道 , 有一 定 的传 输 错误 具 率 。在非 理 想信 道 条 件 下 , 献 [ ] 究 了 融合 文 6研 规 则的优 化 问题 ; 献 [ ] 研 究 了 传 感 器 判决 文 7则 规则 的优 化 问 题 。 文 中 研 究 非 理 想信 道 条 件 下 融合 规则 及传 感 器判 决规 则 的全 局 最优 化 问题 ,
最优化计算方法(工程优化)第4章
点。
如果 2 f x 负定,则 x 为 f (x) 的严格局部极大点。
无约束优化的最优性条件----凸优化的一阶条件
定理(一阶充要条件)
设 f : Rn R 是凸函数且在 x 处连续可微,则 x 为 f (x)的全局极小点的充要条件是 f (x*) 0.
f (x p) f (x)+f (x)T p o( )
P是什么方向时,函数值 f (x p) 下降最快?也就是
p是什么方向时,f (x)T p 取得最小值?
f (x)T p f (x) p cos(f (x), p)
当 cos(f (x), p) 1 时,f (x)T p 最小,最小值为
令 f x 0, 即:
利用一阶条件 求驻点
利用二阶条件 判断驻点是否 是极小点
x12 1 0
x22
2x2
0
得到驻点: 1 1 1 1
x1
0 ,
x2
2 ,
x3
0
,
x4
2
.
无约束优化的最优性条件
函数 f x 的Hesse阵:
2
f
x
2x1
0
0
2
x2
2
利用二阶条件 判断驻点是否 是极小点
2 0
0 2
的行列式小于0;
x1, x4是鞍点;
2
f
x2
2 0
0
2
是正定矩阵;
x2 是极小点;
2
f
x3
2 0
0 2
是负定矩阵;
x3 是极大点。
• 对某些较简单的函数,这样做有时是可行的;
几种常见的优化算法
⼏种常见的优化算法⼏种常见的优化算法:参考:我们每个⼈都会在我们的⽣活或者⼯作中遇到各种各样的最优化问题,⽐如每个企业和个⼈都要考虑的⼀个问题“在⼀定成本下,如何使利润最⼤化”等。
最优化⽅法是⼀种数学⽅法,它是研究在给定约束之下如何寻求某些因素(的量),以使某⼀(或某些)指标达到最优的⼀些学科的总称。
随着学习的深⼊,博主越来越发现最优化⽅法的重要性,学习和⼯作中遇到的⼤多问题都可以建模成⼀种最优化模型进⾏求解,⽐如我们现在学习的机器学习算法,⼤部分的机器学习算法的本质都是建⽴优化模型,通过最优化⽅法对⽬标函数(或损失函数)进⾏优化,从⽽训练出最好的模型。
常见的最优化⽅法有梯度下降法、⽜顿法和拟⽜顿法、共轭梯度法等等。
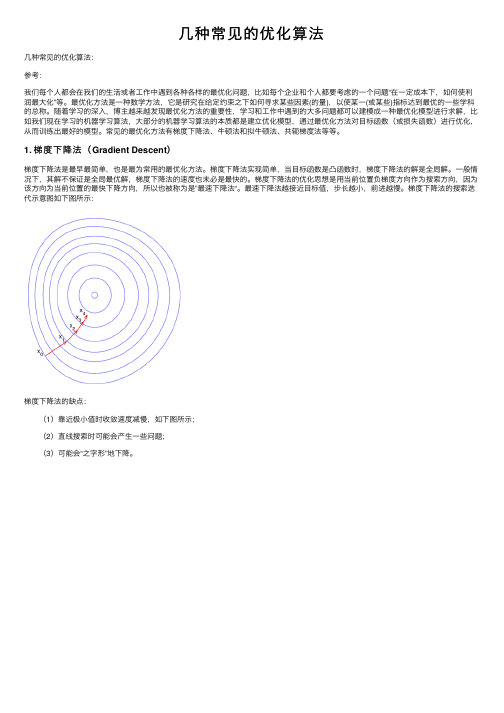
1. 梯度下降法(Gradient Descent)梯度下降法是最早最简单,也是最为常⽤的最优化⽅法。
梯度下降法实现简单,当⽬标函数是凸函数时,梯度下降法的解是全局解。
⼀般情况下,其解不保证是全局最优解,梯度下降法的速度也未必是最快的。
梯度下降法的优化思想是⽤当前位置负梯度⽅向作为搜索⽅向,因为该⽅向为当前位置的最快下降⽅向,所以也被称为是”最速下降法“。
最速下降法越接近⽬标值,步长越⼩,前进越慢。
梯度下降法的搜索迭代⽰意图如下图所⽰:梯度下降法的缺点: (1)靠近极⼩值时收敛速度减慢,如下图所⽰; (2)直线搜索时可能会产⽣⼀些问题; (3)可能会“之字形”地下降。
从上图可以看出,梯度下降法在接近最优解的区域收敛速度明显变慢,利⽤梯度下降法求解需要很多次的迭代。
在机器学习中,基于基本的梯度下降法发展了两种梯度下降⽅法,分别为随机梯度下降法和批量梯度下降法。
⽐如对⼀个线性回归(Linear Logistics)模型,假设下⾯的h(x)是要拟合的函数,J(theta)为损失函数,theta是参数,要迭代求解的值,theta求解出来了那最终要拟合的函数h(theta)就出来了。
其中m是训练集的样本个数,n是特征的个数。
五种最优化方法范文

五种最优化方法范文最优化是一个数学领域,在解决实际问题时,通过寻找最优解的方法,使得目标函数的值最小或最大化。
在最优化问题中,有许多不同的方法可以用来求解。
以下是五种常见的最优化方法。
1.梯度下降法梯度下降法是一种基于梯度信息的迭代算法,用于求解最小化目标函数的最优解。
其基本思想是从初始点开始,根据负梯度方向进行迭代求解,直到达到预定的停止条件或收敛到最优解。
梯度下降法的优点是简单易实现,适用于大规模问题。
缺点是容易陷入局部最优或鞍点,并且收敛速度可能较慢。
2.牛顿法牛顿法是一种基于二阶导数信息的迭代算法,用于求解非线性最优化问题。
其基本思想是通过二阶泰勒展开近似目标函数,以牛顿法的更新方程进行迭代求解。
与梯度下降法相比,牛顿法收敛速度更快。
但牛顿法的缺点是需要计算目标函数的二阶导数矩阵,计算代价较大,并且需要满足一定的收敛条件。
3.拟牛顿法拟牛顿法是一种通过拟合目标函数的局部特征来逼近牛顿法的方法。
常用的拟牛顿法有DFP(Davidon-Fletcher-Powell)方法和BFGS (Broyden-Fletcher-Goldfarb-Shanno)方法。
拟牛顿法利用目标函数的一阶导数信息来近似目标函数的二阶导数矩阵,从而避免了计算二阶导数的复杂性,且收敛速度比梯度下降法更快。
拟牛顿法的缺点是需要存储和更新一个Hessian矩阵的逆或近似逆。
4.线性规划线性规划是一种最优化问题的形式,其中目标函数和约束条件都是线性的。
线性规划问题可以通过线性规划算法求解,如单纯形法、内点法等。
线性规划问题具有良好的理论基础和高效的求解方法。
线性规划在工业、供应链管理、运输问题等方面有广泛的应用。
5.整数规划整数规划是一种最优化问题的形式,其中决策变量只能取整数值。
整数规划问题可以通过整数规划算法求解,如分支定界法、割平面法等。
整数规划在许多实际情况下具有重要的应用,例如在生产计划、线路设计、货物装载等问题中。
最优化理论与算法(第一章)
最优化理论与算法(数学专业研究生)第一章 引论§1.1 引言一、历史与现状最优化理论最早可追溯到古老的极值问题,但成为一门独立的学科则是在20世纪四十年代末至五十年代初。
其奠基性工作包括Fritz John 最优性条件(1948),Kuhn-Tucker 最优性条件(1951),和Karush 最优性条件(1939)。
近几十年来最优化理论与算法发展十分迅速,应用也越来越广泛。
现在已形成一个相当庞大的研究领域。
关于最优化理论与方法,狭义的主要指非线性规划的相关内容,而广义的则涵盖:线性规划、非线性规划、动态规划、整数规划、几何规划、多目标规划、随机规划甚至还包括变分、最优控制等动态优化内容。
本课程所涉及的内容属于前者。
二、最优化问题的一般形式 1、无约束最优化问题min ()nx Rf x ∈ (1.1) 2、约束最优化问题min ()()0, ..()0, i i f x c x i E s t c x i I=∈⎧⎨≥∈⎩ (1.2)这里E 和I 均为指标集。
§1.2数学基础一、 范数 1. 向量范数max i x x ∞= (l ∞范数) (1.3)11ni i x x ==∑ (1l 范数) (1.4)12221()ni i x x ==∑ (2l 范数) (1.5)11()np pi pi xx ==∑ (p l 范数) (1.6)12()TAxx Ax = (A 正定) (椭球范数) (1.7)事实上1-范数、2-范数与∞-范数分别是 p -范数当 p =1、2和p →∞时情形。
2.矩阵范数定义1.1 方阵A 的范数是指与A 相关联并记做A 的一个非负数,它具有下列性质: ① 对于0A ≠都有0A >,而0A =时0A =; ② 对于任意k R ∈,都有kA k A =; ③ A B A B +≤+; ④ AB A B ≤; 若还进一步满足: ⑤ pp AxA x ≤则称之为与向量范数p相协调(相容)的方阵范数。
最优化基础理论与方法
最优化基础理论与⽅法⽬录1.最优化的概念与分类 (2)2. 最优化问题的求解⽅法 (3)2.1线性规划求解 (3)2.1.1线性规划模型 (3)2.1.2线性规划求解⽅法 (3)2.1.3 线性规划算法未来研究⽅向 (3)2.2⾮线性规划求解 (4)2.2.1⼀维搜索 (4)2.2.2⽆约束法 (4)2.2.3约束法 (4)2.2.4凸规划 (5)2.2.5⼆次规划 (5)2.2.6⾮线性规划算法未来研究⽅向 (5)2.3组合规划求解⽅法 (5)2.3.1 整数规划 (5)2.3.2 ⽹络流规划 (7)2.4多⽬标规划求解⽅法 (7)2.4.1 基于⼀个单⽬标问题的⽅法 (7)2.4.2 基于多个单⽬标问题的⽅法 (8)2.4.3多⽬标规划未来的研究⽅向 (8)2.5动态规划算法 (8)2.5.1 逆推解法 (8)2.5.2 顺推解法 (9)2.5.3 动态规划算法的优点及研究⽅向 (9)2.6 全局优化算法 (9)2.6.1 外逼近与割平⾯算法 (9)2.6.2 凹性割⽅法 (9)2.6.3 分⽀定界法 (9)2.6.4 全局优化的研究⽅向 (9)2.7随机规划 (9)2.7.1 期望值算法 (10)2.7.2 机会约束算法 (10)2.7.3 相关机会规划算法 (10)2.7.4 智能优化 (10)2.8 最优化软件介绍 (11)3 最优化算法在电⼒系统中的应⽤及发展趋势 (12)3.1 电⼒系统的安全经济调度问题 (12)3.1.1电⼒系统的安全经济调度问题的介绍 (12)3.1.2电⼒系统的安全经济调度问题优化算法的发展趋势 (12)2. 最优化问题的求解⽅法最优化⽅法是近⼏⼗年形成的,它主要运⽤数学⽅法研究各种优化问题的优化途径及⽅案,为决策者提供科学决策的依据。
最优化⽅法的主要研究对象是各种有组织系统的管理问题及其⽣产经营活动。
最优化⽅法的⽬的在于针对所研究的系统,求得⼀个合理运⽤⼈⼒、物⼒和财⼒的最佳⽅案,发挥和提⾼系统的效能及效益,最终达到系统的最优⽬标。
求全局最优化的几种确定性算法
求全局最优化的几种确定性算法全局最优化是一个在给定约束条件下寻找函数全局最小或最大值的问题。
确定性算法是指每次运行算法都能得到相同的结果,且结果能确保接近全局最优解。
以下是几种常见的确定性算法:1. 梯度下降法(Gradient Descent)梯度下降法是一种迭代优化算法,通过沿负梯度方向逐步调整参数值,直至找到函数的最小值或最大值。
该算法对于凸函数是有效的,但可能会陷入局部最优解。
可以通过调整学习率和选择不同的初始参数值来改进算法的效果。
2. 牛顿法(Newton's Method)牛顿法利用函数的二阶导数信息来找到函数的最小值或最大值。
它基于泰勒级数展开,通过使用当前点的一阶和二阶导数来逼近函数,然后迭代地更新参数值。
牛顿法通常比梯度下降法更快地收敛到全局最优解,但它可能需要计算和存储较大的二阶导数矩阵。
3. 共轭梯度法(Conjugate Gradient)共轭梯度法是一种迭代法,用于求解线性方程组或优化问题。
它利用问题的海森矩阵或其逼近的特殊性质,在有限次迭代后得到准确解。
共轭梯度法在解决大规模问题时具有可伸缩性,且不需要存储大规模矩阵。
4. BFGS算法(Broyden–Fletcher–Goldfarb–Shanno Algorithm)BFGS算法是一种拟牛顿法,用于解决无约束非线性优化问题。
它通过近似目标函数的海森矩阵的逆矩阵来逼近最优解,从而避免了计算海森矩阵的复杂性。
BFGS算法具有快速的收敛性和较好的全局收敛性。
5. 遗传算法(Genetic Algorithms)遗传算法是一种模拟生物进化过程的优化方法,通过模拟自然界的选择、交叉和变异过程来最优解。
它将问题表示成一个个基因型,通过使用选择、交叉和变异等操作来产生新的个体,并根据适应度函数评估每个个体的好坏。
遗传算法具有全局能力,可以处理非线性、非凸函数以及离散优化问题。
6. 粒子群优化算法(Particle Swarm Optimization)粒子群优化算法是一种模拟鸟群或鱼群行为的优化算法。
几种典型仿生优化算法的比较及混沌蚁群算法介绍

几种典型仿生优化算法的比较及混沌蚁群算法介绍1、几种典型仿生优化算法的比较自上世纪50年代以来,人们从生物进化的机理中受到启发,构造和设计出许多仿生优化算法,如遗传算法、蚁群算法、粒子群算法、捕食搜索算法等,它们都属于一类模拟自然界生物系统、完全依赖生物体自身体能、通过无意识寻优行为来优化其生存状态以适应环境需要的最优化智能算法。
它们都有着自已的特点,适合不同类型的实际问题。
1.1共同点1、都是一类不确定的概率型全局优化算法。
仿生优化算法的不确定性是伴随其随机性而来的,其主要步骤含有随机因素,有更多的机会求得全局最优解,比较灵活。
2、都不依赖于优化问题本身的严格数学性质,都具有稳健性。
在优化过程中都不依赖于优化问题本身的严格数学性质以及目标函数和约束条件的精确数学描述。
因此在求解许多不同问题时,只需要设计相应的评价函数,基本无需修改算法的其它部分,在不同条件和环境下算法的适用性和有效性很强。
3、都是一种基于多个智能体的仿生算法,表现出与环境交互的能力。
仿生优化算法中的各个智能体之间通过相互协作来更好地适应环境,表现出与环境交互的能力。
4、都具有本质并行性。
一是仿生优化的内在并行性,即非常适合大规模并行;二是仿生优化计算的内含并行性,能使其以较少的计算获得较大的收益。
5、都具有突现性。
即仿生算法总目标的完成是在多个智能体个体行为运动过程中突现出来的。
6、都具有自组织性和进化性。
在不确定的环境中,可通过自学习不断提高算法中个体的适应性。
1.2不同点1、遗传算法:以决策变量的编码作为运算对象,借鉴了生物学的染色体概念,模拟自然界中生物遗传和进化的精英策略,采用个体评价函数进行选择操作,并采用交叉、变异算子产生新的个体,使算法具有较大的灵活性和可扩展性。
缺点:求解到一定范围时往往做大量无为的冗余迭代,求精确解效率低。
2、蚁群算法:采用正反馈机制或称是一种增强性学习系统,通过不断更新信息素达到最终收敛于最优路径的目的,这是其不同于其它仿生优化算法的显著特点。
全面而强大的设计优化算法库
全面而强大的设计优化算法库数值优化、直接搜索、全局优化、多目标优化算法,是工程师开展设计优化工作的利器。
数值优化通常的工程优化问题具有非线性、连续的特点,数值优化是解决这类问题的理想方法。
数值优化算法能够利用函数的导数、梯度等数学特征,实现高效的优化。
数值优化算法的优点是:ü能有效探索初始设计点周围局部区域ü如果设计空间是连续、单峰的形态,能够沿最快下降方向快速探索ü特定条件下,能从数学上证明其收敛性。
梯度算法的缺点是:ü非常依赖初始设计点,有可能落入局部解ü当变量数增加时,求解梯度的计算代价急剧增加ü如果无法求得解析的梯度公式,则必需采用有限差分算法求解梯度算法简称算法全称MMFD 修正可行方向法(Modified Method of Feasible Directions)LSGRG 广义下降梯度法(Large Scale Generalized Reduced Gradient)NLPQL 序列二次规划(Schittkowski改良版,Sequential Quadratic Programming )MOST 多功能优化系统技术(Multifunction Optimization System Tool)MISQP 混合整型序列二次规划(Mixed-Integer Squential Quadratic Programming)直接搜索法直接搜索法无须计算任何函数梯度,当优化问题中的目标函数较为复杂或者不能用变量显函数描述时,可采用直接搜索的方法搜索到最优点。
Isight中提供的直接法包括:算法简称算法全称HJ 霍克-吉维斯直接搜索法(Hooke-Jeeves Direct Search Method)DS 下山单纯形法(Downhill Simplex)直接法特点如下:优点缺点1) 能有效探索初始设计点周围局部区域2) 探索阶段采用大步长,因此能够探索到比梯度优化算法更大的设计空间。
最优化理论与算法完整版课件
多目标规划 对策论等
随机过程方法
统计决策理论 马氏过程 排队论 更新理论 仿真方法 可靠性理论等
TP SHUAI
统计学方法
回归分析 群分析 模式识别 实验设计 因子分析等
6
优化树
TP SHUAI
7
•最优化的发展历程
2E d 2 B2 p L2 h2 0
8 L2 h2
dhB
6.结构设计问题
另外还要考虑到设计变量d和h有界。 从而得到两杆桁架最优设计问题的数学模型:
min 2dB L2 h2
s.t.
p L2 h2 0 dhB
2E d 2 B2
则称x0为极小化问题min f(x),x S的局部最优解
TP SHUAI
30
优化软件 / /neos/solvers/index.html
TP SHUAI
23
6.结构设计问题
p1
p2
h
2p
2L
B
d
受力分析图
圆杆截面图
2p
h
2L
桁杆示意图
TP SHUAI
24
6.结构设计问题
解:桁杆的截面积为 : S dB
桁杆的总重量为:W 2dB L2 h2
负载2p在每个杆上的分力为:p1
p
cos
p
L2 h2 h
20
5负载平衡(1)
实例: 网络G(V,E) 及一组m 个数的集合{s,d>0},表示 连接源点 s与汇点d 之间的流量
解: {s,d>0}的一组路由, 即G(V,E) 中m 条s 与 d间的路, 表示连接s与d 的负载流量的路径。
介绍一个全局最优化的方法:随机游走算法(RandomWalk)

介绍⼀个全局最优化的⽅法:随机游⾛算法(RandomWalk)介绍⼀个全局最优化的⽅法:随机游⾛算法(Random Walk)2017年08⽉12⽇ 12:13:26 阅读数 184641. 关于全局最优化求解 全局最优化是⼀个⾮常复杂的问题,⽬前还没有⼀个通⽤的办法可以对任意复杂函数求解全局最优值。
上⼀篇⽂章讲解了⼀个求解局部极⼩值的⽅法——梯度下降法。
这种⽅法对于求解精度不⾼的情况是实⽤的,可以⽤局部极⼩值近似替代全局最⼩值点。
但是当要求精确求解全局最⼩值时,梯度下降法就不适⽤了,需要采⽤其他的办法求解。
常见的求解全局最优的办法有拉格朗⽇法、线性规划法、以及⼀些⼈⼯智能算法⽐如遗传算法、粒⼦群算法、模拟退⽕算法等(可以参见我之前的博客)。
⽽今天要讲的是⼀个操作简单但是不易陷⼊局部极⼩值的⽅法:随机游⾛算法。
2. 随机游⾛算法操作步骤设f(x)f(x)是⼀个含有nn个变量的多元函数,x=(x1,x2,...,xn)x=(x1,x2,...,xn)为nn维向量。
1. 给定初始迭代点xx,初次⾏⾛步长λλ,控制精度ϵϵ(ϵϵ是⼀个⾮常⼩的正数,⽤于控制结束算法)。
2. 给定迭代控制次数NN,kk为当前迭代次数,置k=1k=1。
3. 当 k<Nk<N时,随机⽣成⼀个(−1,1)(−1,1)之间的nn维向量u=(u1,u2,⋯,un),(−1<ui<1,i=1,2,⋯,n)u=(u1,u2,⋯,un),(−1<ui<1,i=1,2,⋯,n),并将其标准化得到u′=u∑ni=1u2i√u′=u∑i=1nui2。
令x1=x+λu′x1=x+λu′,完成第⼀步游⾛。
4. 计算函数值,如果 f(x1)<f(x)f(x1)<f(x),即找到了⼀个⽐初始值好的点,那么kk重新置为1,将x1x1变为xx,回到第2步;否则k=k+1k=k+1,回到第3步。
5. 如果连续NN次都找不到更优的值,则认为,最优解就在以当前最优解为中⼼,当前步长为半径的NN维球内(如果是三维,则刚好是空间中的球体)。
全局优化问题的最优性条件及其实现算法
全局优化问题的最优性条件及其实现算法丁译;程建强;邬冬华【摘要】This paper presents another integral-level set method for finding the global maxima when the function is always greater than zero, and modifies the integral function according to the concept of weight. The algorithm and the convergence criteria for the method are also given.%基于求总极小值的积分水平集算法,提出另一类求总极大值的积分水平集算法;并根据权重的概念,对其中的积分均值函数进行修正,建立了求总极大值的积分水平集算法,以及相应的收敛准则;同时,对不同的权重值进行了数值试验,并对结果作出了客观评价.【期刊名称】《上海大学学报(自然科学版)》【年(卷),期】2012(018)001【总页数】5页(P43-47)【关键词】全局优化;积分水平集;权重【作者】丁译;程建强;邬冬华【作者单位】上海大学理学院,上海200444;上海大学理学院,上海200444;上海大学理学院,上海200444【正文语种】中文【中图分类】O242.26最优化问题存在于现实生活中的许多领域,而最优化方法是人们对实际问题进行建模和分析的重要手段.在分析问题的过程中所抽象出来的优化模型,许多都可以归结为求全局最优解的问题.现有的求解全局优化问题的方法依据收敛性质分为两大类[1]:确定型方法和随机型方法.确定型方法包括区间方法、分支定界方法、填充函数方法、积分水平集算法等;随机型方法包括纯粹随机搜索算法、纯粹更新搜索算法和现代启发式算法(如遗传算法、模拟退火算法)等.一个全局优化问题可表述如下:式中,G是Rn上的有界闭区域,f:Rn→R上的连续函数,f*为f(x)在G中的总极小值.20世纪七八十年代,郑权等[2-4]提出了求总极小值的积分水平集算法,并给出了相应的收敛准则.随后,邬冬华等[5-10]对此算法进行了多次修正.该算法的主要思想是在第k步构造一个均值函数以及水平集从而得到2个收敛序列{ck}和{Hk},算法终止条件为水平集上的均方差趋近于0.本研究受到求总极小值的积分水平集算法及权重思想的启发,考虑n维欧式空间Rn中区域D上的连续函数f(x)的总极大值,建立了一种新的求总极大值的积分水平集算法,并给出了相应的收敛性法则.对于连续函数f(x),若有一点x*∈D,对于一切x∈D,满足不等式则称x*是函数在D上的总极大值点,f(x*)是总极大值.D中所有总极大值点的全体,构成了总极大值点集.另外,假设对任意x∈D,f(x)≥0;若f(x)<0,则认为可以通过给f(x)加上一个足够大的常数m>0,使得f(x)+m≥0.那么,总极大值的问题可表示为式中,D为Rn中的有界闭集,f:Rn→R上的连续函数,且对任意x∈D,f(x)≥0,f*为f(x)在D中的总极大值.1 求总极大值的积分水平集算法给定一个常数c0≥0,使水平集非空,式(6)的右端表示在D中满足关系式f(x)≥c0的点的全体.设D是有界闭集,若H0是有界闭集,则H0是Rn中的紧集,f(x)在H0上达到极大值.由于对D-H0上的点x,f(x)<c0,故这个极大值必是总极大值.于是,只需在H0上讨论f(x)在D中的总极大值问题.引理1 若μ(H0)=0,且H0≠Ø,其中μ(H0)表示集合H0的勒贝格测度,则c0就是f(x)的总极大值,H0就是f(x)的总极大值点集.证明反证法.若不然,设有∈D,f()≥c0,由f(x)的连续性,必存在一个邻域O(,δ),对于x∈O(,δ),f(x)>c0,因此,O(,δ)⊂H0.但是,这将导致μ(H0)≥μ(O(,δ))>0,与μ(H0)=0相矛盾.于是,设μ(H0)>0,依据求总极小值的积分水平集算法,构造f(x)在H0上的均值则一般地,由构造水平集以及均值(若μ()=0,由引理1,已是极值点集是总极值,因此,可设μ()>0)并且k=1,2,….从而得到一个单调上升数列{}以及一个单调的集序列{}.根据权重的定义,此时中任意点的函数值权重为在本研究中,因为f(x)≥0,那么,若对任意点的函数值f(x)赋予权重fn-1(x)(n为不小于1的整数),则函数值越大的f(x),其权重也越大,函数值上升的速度越快.于是,对f(x)在H0上的均值函数进行如下修正:则一般地,由ck构造水平集及均值并且k=1,2,….从而得到一个新的单调上升数列{ck}及一个单调的集序列{Hk},它们的上升速度均比数列{}和序列{}快.由于ck≤f(x*)(设x*是f(x)在D上的总极大值点,k=1,2,…),故{ck}有上界,设引理2 设单调上升数列{ck}的极限为c,则水平集Hk={x|f(x)≥ck,x∈D}也单调,它们的极限集为Hc,即其中证明因为c≥ck,则Hc⊂Hk对一切k成立,故.反之,对任意一个对一切k成立.令k→∞,取极限后得f(x)≥c,即x∈ Hc,因此引理3 若函数f(x)满足f(x)≥0,那么证明根据Jensen不等式引理,对于任意随机变量Y,若g(y)是凸函数,则Eg(Y)≥g(EY).对于,令是随机变量X在区间D上的概率密度,随机变量Y=f(X),g(y)=yn.由于g(y)=yn在区间{y:y>0}上是凸函数,由Jensen不等式,易得定理1 若f(x)是区域D上的连续函数,则式(15)中数列{ck}的极限c*一定是f(x)在D上的总极大值,水平集序列{Hk}的极限H*是f(x)的总极大值点集.证明反证法.设有∈D,f()>c*,由于f(x)在D上连续,则存在η>0及的一个邻域O(,δ),对于x∈O(,δ),f(x)>c*+η.又因为c*≥ck,k=1,2,…,则对任意x∈O(,δ),f(x)>ck,所以,O(,δ)⊂Hk,k=1,2,….另外,由于ck→c*,故对任意ε>0,存在N,当m≥N时,再由引理3可知,那么则由上述可知,在Hm-O(,δ)上,f(x)≥ck;在O,δ)上,f(x)>c*+η,所以又因为c*≥cm,(c*-cm)·μ(O(x—,δ))≥0,所以移项可得则又由于0<μ(Hm)<μ(H0),那么此时,式(22)中不等号的右端是一个和m及ε无关的正数,若取那么式(22)与 (20)矛盾.因此,c*是f(x)在D上的总极大值.由引理2可知是总极大值,对于x∈D,f(x)不能大于c*,故是总极大值点集(非空).定理2 式(15)中单调上升数列{ck}的极限c是f(x)的总极大值的充要条件是:当k→∞时,方差序列,此时,就是极大点集.证明必要性.设c是总极大值,则充分性.设方差序列条件成立时,c不是总极大值.令Hc={x|f(x)≥c,x∈D},那么μ(Hc)>0,且已知Hk→Hc(k→∞),故μ(Hk)→μ(Hc)(k→∞)(已假设H0有界),那么上式右端被积函数一致有界.当k→∞时,2个积分→0,设f(x)在D上的总极值为c*=f(x*),那么c*>c,故存在η>0以及x*的邻域O(x*,δ),对x∈O(x*,δ),f(x)>c+η,这时这与矛盾.定理3 若有某下标k,使得ck=ck+1或μ(Hk)= μ(Hk+1),则f(x)≡常数.证明先证若 ck=ck+1,则μ(Hk)=μ(Hk+1),μ(Hk-1)=μ(Hk),其中μ(Hk)=μ(Hk+1)显然成立.然后,证明μ(Hk-1)=μ(Hk).令ΔHk=Hk-1-Hk,则.由于ck=ck+1,上式又可表示为所以当x∈ΔHk时,f(x)-ck+1≤0,那么,这时若μ(ΔHk)=0,即证明了μ(Hk-1)=μ(Hk);或者在ΔHk上,f(x)≡ck+1.由定义可知,ΔHk={x|ck-1≤f(x)<ck,x∈D},ΔHk必为空集,也就证明了μ(Hk-1)=μ(Hk).再证,若μ(Hk)=μ(Hk+1),则ck=ck+1,ck+1=ck+2,其中ck+1=ck+2显然成立.然后,证明ck=ck+1.设ck<ck+1,由f(x)的连续性,存在测度为正的小邻域O(x,δ)⊂ΔHk={x|f(x)>ck,f(x)≤ck+1},这与μ(Hk)=μ(Hk+1)矛盾.利用上面的结果,若ck=ck+1,可推得μ(Hk-1)= μ(Hk),μ(Hk)=μ(Hk+1),从而可得ck-1=ck,ck+1= ck+2.依此类推,可知f(x)≡常数.若μ(Hk)= μ(Hk+1),则ck=ck+1,也可推得f(x)≡常数.2 算法步骤将上述迭代模型归结为计算数列{ck}和水平集序列{Hk},概括算法步骤如下:(1)取x0∈D,给定一个正数ε,令c0=f(x0),H0={x|f(x)≥c0,x∈D},k=0;(2)若μ(Hk)=0,则ck为总极大值,Hk为总极大值点集,转步骤(6);(3)计算且令Hk+1= {x|f(x)≥ck+1,x∈D},若ck+1=ck,则ck+1为总极大值,Hk+1为总极大值点集,转步骤(6),否则,转下一步;(4)计算均方差(5)若V≥ε,令k=k+1,转步骤(2),否则,转步骤(6);(6)令f*=ck+1,且H=Hk+1,H为f(x)在D中的近似总极大值点集,算法终止.3 数值试验及算法讨论本研究基于积分水平集算法,提出了对函数值恒大于0的函数求总极大值的概念性积分水平集算法;并根据权重的概念,修正了均值函数,理论上可使得函数值上升的速度更快,运算效率得到提高.在实际计算过程中,本研究引入重要样本(important sample)和相对熵(cross entropy,CE)方法,在相对熵方法中,采用指数分布更新参数.为了验证该算法的有效性,对具有代表性的全局最优化问题Rastrigin函数进行改进,分别运用一般的相对熵方法和改进的相对熵方法求其极大值,并进行了简单的比较.改进后的Rastrigin函数可表示为试验结果如表1所示.数值试验的结果显示,当全局最优化问题的维数较低(如d≤10),n取到足够大(如n≥100)时,运算时间明显缩短,表明改进后的相对熵算法具有较好的收敛性和较高的效率,与理论推测结果一致,因此本算法有效.然而,当全局最优化问题的维数d越高时,n越大,运算时间越长,效率偏低,算法有待改进.表1 CE算法与改进的CE算法的数值试验结果Table 1 Numerical results of CE method and modified CE methodCE 算法改进的CE算法X的维数运行结果运行时间/s n的次数运行结果运行时间/s 2 99.991 7 1.047 2 99.995 7 1.203 10 99.993 1 1.140 100 99.993 0 0.765 3 99.985 0 1.593 2 99.988 3 1.797 10 99.988 7 1.704 100 99.991 4 1.219 5 99.976 7 3.453 2 99.978 5 3.313 1099.977 1 3.079 100 99.974 0 2.266 10 99.955 1 9.219 2 99.943 8 9.422另外,本研究赋予函数的权重是fn-1(x),理论上也可以使用同样具有单调性的指数函数或者对数函数替代,那么对应的{ck}可以分别表示为具体用这2种方法得到的2个序列是否收敛,以及用这2种方法求极值的最优性条件将另文给出.参考文献:[1] PARDALOSP P,ROMEIJNH E,HOANGT.Recent developments and trends in global optimization[J].Journal of Computational and Applied Mathematics,2000,124:209-228.[2] ZHENGQ,JIANGB C,ZHUANGS L.A method for finding globalextrema[J]. Acta Mathematicae Applicatae Sinica,1978,2(1):161-174.[3]ZHENGQ.Optimality conditions of global optimization (Ⅰ) [J].Acta Mathematicae Applicatae Sinica:English Series,1985,1(2):66-78.[4] ZHENGQ.Optimali ty conditions of global optimization (Ⅱ) [J].Acta Mathematicae Applicatae Sinica:English Series,1985,1(3):118-132. [5] WUD H,TIANW W,ZHANGL S,et al.An algorithm of modified integral-level set method for solving global optimization[J].Acta Mathematicae Applicatae Sinica,2001,24:100-110.[6]俞武扬,邬冬华,吕瑜佩.一种求有约束总极值的新途径[J].上海大学学报:自然科学版,2002,8(6):590-597.[7]田蔚文,邬冬华,张连生,等.一种修正的求约束总极值的积分水平集方法[J].应用数学和力学,2004,25:202-209.[8]邬冬华,俞武扬,田蔚文,等.一种求约束总极值的水平值估计方法[J].应用数学和力学,2006(7):165-178.[9] PENGZ,WUD H,TIANW W.A level-value estimation method for solving constrained global optimization[J].Mathematica Numerica Sinica,2007,29(3):271-282.[10] WUD H,YUW Y,ZHENGQ.A sufficient and necessary condition for global optimization[J].Applied Mathematics Letters,2010,23:17-21.。
最优化各算法介绍
最速下降法:算法简单,每次迭代计算量小,占用内存量小,即使从一个不好的初始点出发,往往也能收敛到局部极小点。
沿负梯度方向函数值下降很快的特点,容易使认为这一定是最理想的搜索方向,然而事实证明,梯度法的收敛速度并不快.特别是对于等值线(面)具有狭长深谷形状的函数,收敛速度更慢。
其原因是由于每次迭代后下一次搜索方向总是与前一次搜索方向相互垂直,如此继续下去就产生所谓的锯齿现象。
从直观上看,在远离极小点的地方每次迭代可能使目标函数有较大的下降,但是在接近极小点的地方,由于锯齿现象,从而导致每次迭代行进距离缩短,因而收敛速度不快.牛顿法:基本思想:利用目标函数的一个二次函数去近似一个目标函数,然后精确的求出这个二次函数的极小点,从而该极小点近似为原目标函数的一个局部极小点。
优点 1. 当目标函数是正定二次函数时,Newton 法具有二次终止性。
2. 当目标函数的梯度和Hesse 矩阵易求时,并且能对初始点给出较好估计时,建议使用牛顿法为宜。
缺点:1. Hesse 矩阵可能为奇异矩阵,处理办法有:改为梯度方向搜索。
共轭梯度法:优点:收敛速度优于最速下降法,存贮量小,计算简单.适合于优化变量数目较多的中等规模优化问题.缺点:变度量法:较好的收敛速度,不计算Hesse 矩阵1.对称秩1 修正公式的缺点(1)要求( ) ( ) ( ) ( ) ( ) 0 k k k T k y B s s − ≠0(2)不能保证B ( k ) 正定性的传递2.BFGS 算法与DFP 算法的对比对正定二次函数效果相同,对一般可微函数效果可能不同。
1) BFGS 算法的收敛性、数值计算效率优于DFP 算法;(2) BFGS 算法要解线性方程组,而DFP 算法不需要。
基本性质:有效集法:算法思想:依据凸二次规划问题的性质2,通过求解等式约束的凸二次规划问题,可能得到原凸二次规划问题的最优解。
有效集法就是通过求解一系列等式约束凸二次规划问题,获取一般凸二次规划问题解的方法。
最优化算法与MATLAB的Global Optimization Toolbox
线性,非线性,有界约束) 3, 遗传算法(genetic algorithm 线性,非线性,有界约束,多目标) 4,模拟退火算法(simulated annealing method)
5,多初始点法(MultiStart)
机动
目录
上页
下页
返回
结束
线性规划
主要方法:单纯形方法 计算机软件:Lingo
非线性规划
主要方法:一维搜索算法(二分法,黄金分割法等) 最速下降法 (所谓最速下降方向仅反映
f(x)在x点的局部性质.最速下降法适用于寻优过程的前期
迭代,当接近极值点时,宜选用其它收敛快的算法)
牛顿法、阻尼牛顿法、拟牛顿法.
机动 目录 上页 下页 返回 结束
4,global search计算的函数值要好于patternsearch 。也是搜索多个盆地,到达相对好的点。利用多个初 始点,搜索各自所在盆地中的极值点。在这个例子中 可以找到全局最优点。
5,simulannealbnd 有时候(偶尔)会接受不好的点 来取代当前的点,为的是跳出这个盆地,到达另外的 盆地。
• Global Optimization Toolbox 实际上解决问题
机动
目录
上页
下页
返回
结束
最优化算法
许多生产计划与管理问题都可以归纳为最优 化问题, 最优化模型是数学建模中应用最广泛的 模型之一,其内容包括线性规划、整数线性规划、 非线性规划、动态规划、变分法、最优控制等. 近几年来的全国大学生数学建模竞赛中,几 乎每次都有一道题要用到此方法.
机动
目录
最优化理论与算法

最优化理论与算法
最优化理论与算法是指将一组变量调整到满足某种特定条件的最佳状态的过程。
它是数学优化的一个分支,用于解决最大化或最小化某些给定函数的问题。
它也可以用于解决机器学习问题,比如模型训练和特征选择。
最优化理论与算法是通过不断尝试不同的变量组合,并使用某种评分函数来找到最优解的。
一般来说,评分函数越小,最优解越佳。
最优化算法可以分为两大类:确定性算法和随机算法。
确定性算法是一种解决最优化问题的搜索算法,其目的是通过搜索空间来找到最优解。
它们可以分为局部搜索算法和全局搜索算法。
而随机算法是一种基于概率的解决方案,它们通过概率模拟来探索最佳解。
这些算法可以结合使用,以提高搜索能力。
最优化理论与算法在很多领域都得到了广泛的应用,比如机器学习,数值计算,运筹学,模式识别,检索引擎,控制系统,机器人控制,计算机视觉等。
它们也可以用于优化物流路线,提高产品质量,降低能源消耗,提升收入等。
总之,最优化理论与算法是一种重要的工具,可以帮助我们更好地理解和解决许多实际问题。
最优化问题的算法迭代格式

最优化问题的算法迭代格式什么是最优化问题?最优化问题是指在给定约束条件下寻找某个目标函数取得最大值或最小值的问题。
这类问题在实际应用中非常广泛,例如在工程、经济学、物理学等领域中都会遇到最优化问题。
最优化问题的分类最优化问题可以根据目标函数和约束条件的性质进行分类。
根据目标函数的性质,最优化问题可以分为线性规划、非线性规划、整数规划等。
根据约束条件的性质,最优化问题可以分为等式约束问题和不等式约束问题。
传统的最优化问题求解方法在传统的最优化问题求解方法中,常用的方法有穷举法、梯度下降法、牛顿法等。
这些方法的共同点是需要迭代求解,通过不断迭代逼近最优解。
其中,穷举法是一种朴素的求解方法,通过枚举所有可能的解,并计算目标函数的取值来找到最优解。
然而,穷举法的计算复杂度通常很高,不适用于大规模的最优化问题。
迭代法求解最优化问题为了解决传统方法中计算复杂度高的问题,研究者们逐渐提出了一系列迭代算法来求解最优化问题。
迭代法通过不断更新解的估计值来逼近最优解。
迭代法的主要思想是从一个初始解开始,通过一定的迭代格式来计算下一个解的估计值,直到满足终止条件为止。
在迭代法中,需要确定三个要素:初始解、迭代格式和终止条件。
初始解的选择通常对最后的结果有一定的影响,较好的初始解可以加速算法的收敛速度。
迭代格式是指通过给定的规则来计算下一个解的估计值,不同的迭代格式适用于不同类型的最优化问题。
终止条件是指满足一定条件时终止迭代过程,通常可以选择解的变化不超过一定阈值,或者迭代次数达到一定的上限。
常见的最优化问题迭代算法1. 梯度下降法梯度下降法是一种常用的迭代算法,用于求解无约束的最优化问题。
梯度下降法的思想是通过沿着目标函数梯度的反方向移动,不断逼近最优解。
具体来说,梯度下降法通过以下迭代格式计算下一个解的估计值:x k+1=x k−α∇f(x k)其中,x k+1是下一个解的估计值,x k是当前解的估计值,α是步长,∇f(x k)是目标函数在x k处的梯度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定理 4:设 f : Rn a R , x* ∈ Rn ,f 是 Rn 上得可微凸函数。若有 ∇f (x* ) = 0,则 x* 是(UMP)的整体最优解。
min f ( x) = 1 xT Ax + bT x + c (AP) 2
其中 A 是 n 阶实对称正定矩阵, b ∈ Rn , c ∈ R
定理: 对于问题(AP),若 p0 , p1 ,..., pn−1 为任意一组 A 共轭方向, 则由任意初始点 x 0 ∈ R n 出发,依次沿 p0 , p1 ,..., pn−1 进行精 确一维搜索,则最多经 n 次迭代可达(AP)的整体最优解。
第 7 步 用 F-R 公式取 pk+1 = −∇f (xk+1) + λk pk ,其中 λk = ∇f (xk ) 2 。令 k:=k+1,
转第 4 步。
带约束局部最优化解定理
• K-T条件
X
=
⎪⎧ ⎨
x
∈
⎪⎩
Rn
gi (x) hj (x)
≤ =
0, i = 1,..., p⎪⎫ 0, j = 1,..., q⎪⎭⎬
无约束局部最优算法
• 最速下降法
控制误差ε >0,
初始点xk (k = 0), 迭代步骤: ①:≤ε , 则取x*= xk, 停; 否则, 令 pk = -▽f(xk ) , 用一维搜索法求λk , 使得f(xk + λk pk ) = min {f(xk+λpk) | λ≥0}.
Hk+1 = (E − ρk pkqkT )Hk (E − ρkqk pkT ) + ρk pk pkT
H0 = E
ρk
=
1 qkT pk
pk = x(k+1) − x(k)
qk = ∇f ( x(k+1) ) − ∇f ( x(k) )
迭代停止条件: ∇f (x(k) ) < ε
二次严格凸函数的无约束最优
则称 f 是 S 上的严格凸函数,或 f 在 S 上是严格凸的。
带约束的优化
• 带约束的优化模型
g( x) = ( g1( x),..., g p ( x))T
h( x) = (h1( x),..., hq ( x))T ,
其中, g : Rn a R p , h : Rn a Rq ,那么
⎧min f ( x)
③:令 xk+1=xk+λk pk , k = k + 1, 转向①
优点:整体收敛性, 计算量小, 初始点要求不高 缺点:收敛速度慢
无约束局部最优算法
• BFGS拟牛顿算法(Boryden-Fletcher-Goldfarb- Shanno)
x(k+1) = x(k ) + αk dk
dk = − H k∇f ( x(k))
⎪⎨s.t. g(x) ≤ 0 或者 min f ( x)
⎪⎩ h( x) ≤ 0
x∈ X
定理:非线性优化模型,也称非线性规划(MP),若 g i ( x ), i = 1,..., p ,皆为 R n 上的凸函数, h j ( x ), j = 1,..., q 皆 为线性函数,并且 f 是 X 上的凸函数,则(MP)是凸规划。
则称 x* 是(MP)的局部最优解或局部极小点,称 f (x*)是(MP)的局部 最优值或局部极小点。如果有
I f (x* ) < f (x), ∀ x ∈ Nδ (x* ) X, x ≠ x* ,
则称 x* 是(MP)的严格局部最优解或严格局部极小点,称 f (x*)是(MP) 的严格局部最优值或严格局部极小点。
可微,并且各 ∇gi (x* ), i ∈ I(x* ), ∇hj (x* ), j ∈ J 线性无关。若 x* 是
(MP)的局部最优解,则存在两组实数
λ*i
,
i
∈
I(
x*
)
和
μ
* j
,
j
∈
J
,
使得:
∑ ∑ ⎧⎪∇f
⎨
(x*) +
λ*i ∇gi ( x* ) +
i∈I ( x* )
j∈J
μ*j ∇hj ( x* )
⎪⎪[xy , xy] if x ≤ 0 and y ≥ 0
⎪⎪[xy , xy] if x ≤ 0 and y ≤ 0 ≤ y
⎪[xy , xy] if x ≤ 0 and y ≤ 0
⎪
⎪⎩[min(xy , xy), max(xy,xy)] if x ≤ 0 ≤ x and y ≤ 0 ≤ y
区间数的除法
定理 : 凸规划的任一局部最优解都是它的整体最优解。
局部最优点
• 局部最优点:
定义: 对于非线性规划(MP),若 x* ∈ X ,并且存在 x*的一个
{ } 领域 Nδ (x*) = x ∈ Rn x − x* < δ (δ > 0,δ ∈ R) ,使
I f (x* ) ≤ f (x), ∀ x ∈ Nδ (x* ) X ,
⎧[xy , xy] if x ≥ 0 and y ≥ 0
⎪
⎪[xy , xy] if x ≥ 0 and y ≤ 0 ≤ y
⎪⎪[xy , xy] if x ≥ 0 and y ≤ 0
Ix*Iy=
⎪⎪⎪⎨[[xxyy
, ,
xy] xy]
if x ≤ 0 ≤ x and y ≥ 0 if x ≤ 0 ≤ x and y ≤ 0
无约束局部最优解定理
定理 1:设 f : Rn a R 在点 x ∈ Rn 处可微。若存在 p ∈ Rn ,使 ∇f (x)T p < 0 ,则向量 p 是 f 在点 x 处的下降方向。
定理 2:设 f : Rn a R 在点 x ∈ Rn 处可微。若 x* 是(UMP)的局部最 优解,则 ∇f (x* ) = 0
∀ x* ∈ X 令 J = {1,2,..., q},即hj ( x* ) = 0, j ∈ J
I ( x* ) = {i | gi ( x* ) = 0, i ∈ I }
定理:设 f : Rn a R 和 gi : Rn a R, i ∈ I(x* ) 在点 x* 处可微,
gi , i ∈ I \ I(x* ) 在点 x* 处连续, hj : Rn a R, j ∈ J 在点 x* 处连续
=
0
⎪⎩λ*i ≥ 0, i ∈ I(x* )
其它算法
定理 : 对于(MP)问题,若 f, gi,i∈I, hj, j∈J在点 x*处连续可微,可行点 x* 满足(MP)的 K-T 条件,且 f, gi,i∈I(x*)是凸函数, hj, j∈J是线性函 数,则 x*是(MP)的整体最优解。
• 简约梯度法 • Wolfe法步骤 • 罚函数法 • 障碍函数法
M ⎡⎣an2 ,an2 ⎤⎦
L L O
⎡⎣a1n ⎡⎣a2n
, ,
a1n a2n
⎤⎦⎤⎦⎟⎟⎞
⎡⎣ann
M , ann
⎤⎦
⎟ ⎠⎟⎟
区间矩阵的运算: IA + IB={A + B | A ∈ IA, B ∈ IB}
IA − IB={A − B | A ∈ IA, B ∈ IB}
IA* IB={A*B | A ∈ IA, B ∈ IB}
满足: F(x1, x2, …,xn) = f(x1, x2, …, xn) 则称F为f 的区间扩张。
如果F是由实区间变量经有限次四则运算得到的实值 函数,则称F为f 的自然区间扩张。
一维可行区间集的求解方法
根据函数的中值定理
f (x) −
f
(x* ) =
(x −
x*
)f
' x
(ξ
),
ξ ∈[x , x* ]
全局最优化算法
沈云中
同济大学测量系 E-mail: yzshen@
提要
• 概述 • 局部最优算法 • 区间数学理论 • 全局最优算法 • 带约束全局最优算法
概述
• 最优化模型 函数模型:min : f ( x)
点集范围: x ∈ X
• 对于凸函数和凸集,只存在唯一的极值点
区间数的运算
• 区间数的加减法、开根与平方运算
Ix 操作 Iy ={x 操作 y: x ∈ Ix, y ∈ Iy}
Ix + Iy=[x + y , x + y]
Ix =[ x , x ], 若 x ≥ 0
Ix − Iy=[x − y , x − y]
• 区间的交与并
⎧[x 2 , x 2 ] 若 x ≥ 0
区间数学
• 区间数:设R为实数域,对于给定的两个实数 x, x ∈ R 而且 x ≤ x, 则
Ix = [ x, x ] = {x : x ∈ R, x ≤ x}
称为区间,或区间数。 x, x ,称为区间的端点。
实数是特殊的区间数。 如果两个区间数的端点相同,则称这两个区间数相同。
注:下面PPT的许多资料来自徐培亮
Ix**2=
⎪ ⎨[x
2
,
x
2
]
若 x≤0
⎪ ⎩
[0
,
m
ax(x
2,
x
2
)]
若 x≤0≤ x
Ix
∩
Iy=
⎧⎪[y ,
⎨ ⎪⎩
[x
,
x],若 y], 若
y< y>