数学建模习题答案
数学建模习题集及标准答案
3.动态模型:描述对象特征随时间(空间)的演变过程,分析对象特征的变化规律,预报对象特征的未来性态,研究控制对象特征的手段;微分方程建模:模根据函数及其变化率之间的关系确定函数,根据建模目的和问题分析作出简化假设,按照内在规律或用类比法建立微分方程。
4.按照你的观点应从那几个方面来建立传染病模型。
5.叙述Leslie人口模型的特点。并讨论稳定状况下种群的增长规律。
6.试比较连续形式的阻滞增长模型(Logistic模型)和离散形式阻滞增长模型,并讨论离散形式阻滞增长模型平衡点及其稳定性。
第二部分
1.优点:短期预报比较准确;缺点:不适合中长期预报;原因:预报时假设人口增长率为常数,没有考虑环境对人口增长的制约作用。
(4)你能提出其他的方法吗。用你的方法分配上面的名额。
2.在超市购物时你注意到大包装商品比小包装商品便宜这种现象了吗。比如洁银牙膏50g装的每支1.50元,120g装的3.00元,二者单位重量的价格比是1.2:1。试用比例方法构造模型解释这个现象。
(1)分析商品价格C与商品重量w的关系。价格由生产成本、包装成本和其他成本等决定,这些成本中有的与重量w成正比,有的与表面积成正比,还有与w无关的因素。
根据上述分析我们可以看出,该博弈比较明确可以预测的结果有这样几种情况:
(1) ,此时本博弈的结果是乙在第一阶段不愿意借给对方,结束博弈,双方得益
(1,0),不管这时候b的值是多少;(2) ,此时博弈的结果仍然是乙在第一阶段选择不借,结束博弈,双方得益(1,0);(3) ,此时博弈的结果是乙在第一阶段选择借,甲在第二阶段选择不分,乙在第三阶段选择打,最后结果是双方得益
数学建模试卷及参考答案
数学建模试卷及参考答案一、选择题1. 已知函数 $y = 2x^3 - 5x^2 + 3x - 7$,求导数函数 $y'$ 的值。
A) $6x^2 - 10x + 3$\B) $6x - 10x^2 + 3$\C) $6x - 10x + 3$\D) $6x^2 - 10x^2 + 3$答案:A2. 设矩形的长为 $x$,宽为 $y$,满足 $x^2 + y^2 = 25$。
当矩形的面积最大时,求矩形的长和宽。
A) 长为 4,宽为 3\B) 长为 5,宽为 3\C) 长为 4,宽为 2.5\D) 长为 5,宽为 2.5答案:A3. 一条直线过点 $A(1,2)$ 和点 $B(3,-1)$,与另一条直线 $2x + y - 4 = 0$ 平行。
求该直线的方程。
A) $2x - y + 3 = 0$\B) $2x - y - 3 = 0$\C) $-2x + y - 3 = 0$\D) $2x - y - 5 = 0$答案:B4. 已知函数 $y = e^x$,求 $y$ 的微分值。
A) $e^x$\B) $e^x + C$\C) $e^x - C$\D) $C \cdot e^x$答案:A5. 一辆汽车以每小时 60 公里的速度行驶,途中经过两座相距 60 公里的城市。
假设两座城市间有一辆以每小时90 公里的速度行驶的列车,两车同时出发。
求两辆车首次相遇的时间。
A) 0.5 小时\B) 1 小时\C) 1.5 小时\D) 2 小时答案:A二、填空题6. 已知函数 $f(x) = \sin(x)$,求函数 $g(x) = f^{\prime}(x)$。
答案:$g(x) = \cos(x)$7. 若直线 $3x + ky = 2$ 与直线 $2x - y = 3$ 相垂直,则 $k$ 的值为\_\_\_。
答案:$k = 6$8. 设抛物线 $y = ax^2 - 3x + 2$ 的顶点为 $(2,1)$,则 $a$ 的值为\_\_\_。
数学建模习题及答案
第一部分课后习题1.学校共1000名学生,235人住在A宿舍,333人住在B宿舍,432人住在C宿舍。
学生们要组织一个10人的委员会,试用下列办法分配各宿舍的委员数:(1)按比例分配取整数的名额后,剩下的名额按惯例分给小数部分较大者。
(2)2.1节中的Q值方法。
(3)d’Hondt方法:将A,B,C各宿舍的人数用正整数n=1,2,3,…相除,其商数如下表:横线的数分别为2,3,5,这就是3个宿舍分配的席位。
你能解释这种方法的道理吗。
如果委员会从10人增至15人,用以上3种方法再分配名额。
将3种方法两次分配的结果列表比较。
(4)你能提出其他的方法吗。
用你的方法分配上面的名额。
2.在超市购物时你注意到大包装商品比小包装商品便宜这种现象了吗。
比如洁银牙膏50g装的每支1.50元,120g装的3.00元,二者单位重量的价格比是1.2:1。
试用比例方法构造模型解释这个现象。
(1)分析商品价格C与商品重量w的关系。
价格由生产成本、包装成本和其他成本等决定,这些成本中有的与重量w成正比,有的与表面积成正比,还有与w无关的因素。
(2)给出单位重量价格c与w的关系,画出它的简图,说明w越大c越小,但是随着w的增加c减少的程度变小。
解释实际意义是什么。
3.一垂钓俱乐部鼓励垂钓者将调上的鱼放生,打算按照放生的鱼的重量给予奖励,俱乐部只准备了一把软尺用于测量,请你设计按照测量的长度估计鱼的重量的方法。
假定鱼池中只有一种鲈鱼,并且得到8条鱼的如下数据(胸围指鱼身的最大周长):4.用宽w的布条缠绕直径d的圆形管道,要求布条不重叠,问布条与管道轴线的夹角 应多大(如图)。
若知道管道长度,需用多长布条(可考虑两端的影响)。
如果管道是其他形状呢。
数学建模题目及答案
09级数模试题1. 把四只脚的连线呈长方形的椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然后稍微挪动几次,就可以使四只脚同时着地,放稳了。
试作合理的假设并建立数学模型说明这个现象。
(15分)解:对于此题,如果不用任何假设很难证明,结果很可能是否定的。
因此对这个问题我们假设 :(1)地面为连续曲面(2)长方形桌的四条腿长度相同(3)相对于地面的弯曲程度而言,方桌的腿是足够长的(4)方桌的腿只要有一点接触地面就算着地。
那么,总可以让桌子的三条腿是同时接触到地面。
现在,我们来证明:如果上述假设条件成立,那么答案是肯定的。
以长方桌的中心为坐标原点作直角坐标系如图所示,方桌的四条腿分别在A 、B 、C 、D 处,A 、B,C 、D的初始位置在与x 轴平行,再假设有一条在x 轴上的线ab,则ab 也与A 、B ,C 、D 平行。
当方桌绕中心0旋转时,对角线 ab 与x 轴的夹角记为θ。
容易看出,当四条腿尚未全部着地时,腿到地面的距离是不确定的。
为消除这一不确定性,令 ()f θ为A 、B 离地距离之和,()g θ为C 、D 离地距离之和,它们的值由θ唯一确定。
由假设(1),()f θ,()g θ均为θ的连续函数。
又由假设(3),三条腿总能同时着地, 故()f θ()g θ=0必成立(∀θ)。
不妨设(0)0f =,(0)0g >g (若(0)g 也为0,则初始时刻已四条腿着地,不必再旋转),于是问题归结为:已知()f θ,()g θ均为θ的连续函数,(0)0f =,(0)0g >且对任意θ有00()()0f g θθ=,求证存在某一0θ,使00()()0f g θθ=。
证明:当θ=π时,AB 与CD 互换位置,故()0f π>,()0g π=。
作()()()h f g θθθ=-,显然,()h θ也是θ的连续函数,(0)(0)(0)0h f g =-<而()()()0h f g πππ=->,由连续函数的取零值定理,存在0θ,00θπ<<,使得0()0h θ=,即00()()f g θθ=。
数学建模试题(带答案)
数学建模试题(带答案)第一章4.在1.3节“椅子能在不平的地面上放稳吗”的假设条件中,将四脚的连线呈正方形改为长方形,其余不变。
试构造模型并求解。
答:相邻两椅脚与地面距离之和分别定义为)()(a g a f 和。
f 和g 都是连续函数。
椅子在任何位置至少有三只脚着地,所以对于任意的a ,)()(a g a f 和中至少有一个不为零。
不妨设0)0(,0)0(g >=f 。
当椅子旋转90°后,对角线互换,0π/2)(,0)π/2(>=g f 。
这样,改变椅子的位置使四只脚同时着地。
就归结为证明如下的数学命题:已知a a g a f 是和)()(的连续函数,对任意0)π/2()0(,0)()(,===⋅f g a g a f a 且,0)π/2(,0)0(>>g f 。
证明存在0a ,使0)()(00==a g a f证:令0)π/2(0)0(),()()(<>-=h h a g a f a h 和则, 由g f 和的连续性知h 也是连续函数。
根据连续函数的基本性质,必存在0a (0<0a <π/2)使0)(0=a h ,即0)()(00==a g a f 因为0)()(00=•a g a f ,所以0)()(00==a g a f8第二章7.10.用已知尺寸的矩形板材加工半径一定的圆盘,给出几种简便有效的排列方法,使加工出尽可能多的圆盘。
第三章5.根据最优定价模型 考虑成本随着销售量的增加而减少,则设kx q x q -=0)( (1)k 是产量增加一个单位时成本的降低 ,销售量x 与价格p 呈线性关系0,,>-=b a bp a x (2) 收入等于销售量乘以价格p :px x f =)( (3) 利润)()()(x q x f x r -= (4) 将(1)(2)(3)代入(4)求出ka q kbp pa bp x r --++-=02)(当k q b a ,,,0给定后容易求出使利润达到最大的定价*p 为bakb ka q p 2220*+--=6.根据最优定价模型 px x f =)( x 是销售量 p 是价格,成本q 随着时间增长,ββ,0t q q +=为增长率,0q 为边际成本(单位成本)。
数学建模答案(完整版)
1 建立一个命令M 文件:求数60.70.80,权数分别为1.1,1.3,1.2的加权平均数。
在指令窗口输入指令edit ,打开空白的M 文件编辑器;里面输入s=60*1.1+70*1.3+80*1.2;ave=s/3然后保存即可2 编写函数M 文件SQRT.M;函数 x=567.889与0.0368处的近似值(保留有()f x =效数四位)在指令窗口输入指令edit ,打开空白的M 文件编辑器;里面输入syms x1 x2 s1 s2 zhi1 zhi2 x1=567.889;x2=0.368;s1=sqrt(x1);s2=sqrt(x2);zhi1=vpa(s1,4)zhi2=vpa(s2,4)然后保存并命名为SQRT.M 即可3用matlab 计算的值,其中a=2.3,b=4.89.()f x >> syms a b >> a=2.3;b=4.89;>> sqrt(a^2+b^2)/abs(a-b)ans = 2.08644用matlab 计算函数在x=处的值.()f x =3π>> syms x >> x=pi/3;>> sqrt(sin(x)+cos(x))/abs(1-x^2)ans = 12.09625用matlab 计算函数在x=1.23处的值.()arctan f x x =+>> syms x >> x=1.23;>> atan(x)+sqrt(log(x+1))ans = 1.78376 用matlab 计算函数在x=-2.1处的值.()()f x f x ==>> syms x >> x=-2.1;>> 2-3^x*log(abs(x))ans =1.92617 用蓝色.点连线.叉号绘制函数在[0,2]上步长为0.1的图像.>> syms x y>> x=0:0.2:2;y=2*sqrt(x);>> plot(x,y,'b.-')8 用紫色.叉号.实连线绘制函数在上步长为0.2的图像.ln 10y x =+[20,15]-->> syms x y>> x=-20:0.2:-15;y=log(abs(x+10));>> plot(x,y,'mx-')ln 10[20,y x =+--9 用红色.加号连线 虚线绘制函数在[-10,10]上步长为0.2的图像.sin(22x y π=->> syms x y;>> x=-10:0.2:10;y=sin(x/2-pi/2);>> plot(x,y,'r+--')10用紫红色.圆圈.点连线绘制函数在上步长为0.2的图像.sin(2)3y x π=+[0,4]πsin(2)sin()[0,4]322x y x y πππ=+=->> syms x y >> x=0:0.2:4*pi;y=sin(2*x+pi/3);>> plot(x,y,'mo-.')11 在同一坐标中,用分别青色.叉号.实连线与红色.星色.虚连线绘制y=与.y =>> syms x y1 y2>> x=0:pi/50:2*pi;y1=cos(3*sqrt(x));y2=3*cos(sqrt(x));>> plot(x,y1,'cx-',x,y2,'r*--')12 在同一坐标系中绘制函数这三条曲线的图标,并要求用两种方法加234,,y x y x y x ===各种标注.234,,y x y x y x ===>> syms x y1 y2 y3;>> x=-2:0.1:2;y1=x.^2;y2=x.^3;y3=x.^4;plot(x,y1,x,y2,x,y3);13 作曲线的3维图像2sin x t y t z t ⎧=⎪=⎨⎪=⎩>> syms x y t z >> t=0:1/50:2*pi;>> x=t.^2;y=sin(t);z=t;>> stem3(x,y,z)14 作环面在上的3维图像(1cos )cos (1cos )sin sin x u v y u v z u =+⎧⎪=+⎨⎪=⎩(0,2)(0,2)ππ⨯>> syms x y u v z>> u=0:pi/50:2*pi;v=0:pi/50:2*pi;>>x=(1+cos(u)).*cos(v);y=(1+cos(u)).*sin(v);z=sin(u);>> plot3(x,y,z)15 求极限0lim x +→0lim x +→>> syms x y >> y=sin(2^0.5*x)/sqrt(1-cos(x));>> limit(y,x,0,'right') ans = 216 求极限1201lim (3x x +→>> syms y x >> y=(1/3)^(1/(2*x));>> limit(y,x,0,'right') ans = 017求极限lim x >> syms x y >> y=(x*cos(x))/sqrt(1+x^3);>> limit(y,x,+inf) ans = 018 求极限21lim (1x x x x →+∞+->> syms x y >> y=((x+1)/(x-1))^(2*x);>> limit(y,x,+inf) ans = exp(4)19 求极限01cos 2lim sin x xx x →->> syms x y >> y=(1-cos(2*x))/(x*sin(x));>> limit(y,x,0) ans = 220 求极限 x →>> syms x y >> y=(sqrt(1+x)-sqrt(1-x))/x;>> limit(y,x,0) ans = 121 求极限2221lim 2x x x x x →+∞++-+>> syms x y >> y=(x^2+2*x+1)/(x^2-x+2);>> limit(y,x,+inf) ans = 122 求函数y=的导数5(21)arctan x x -+>> syms x y >> y=(2*x-1)^5+atan(x);>> diff(y) ans = 10*(2*x - 1)^4 + 1/(x^2 + 1)23 求函数y=的导数2tan 1x x y x=+>> syms y x>> y=(x*tan(x))/(1+x^2);>> diff(y)ans =tan(x)/(x^2 + 1) + (x*(tan(x)^2 + 1))/(x^2 + 1) - (2*x^2*tan(x))/(x^2 + 1)^224 求函数的导数3tan x y e x -=>> syms y x >> y=exp^(-3*x)*tan(x)>> y=exp(-3*x)*tan(x) y = exp(-3*x)*tan(x) >> diff(y) ans = exp(-3*x)*(tan(x)^2 + 1) - 3*exp(-3*x)*tan(x)25 求函数y=在x=1的导数22ln sin 2x x π+>> syms x y >> y=(1-x)/(1+x);>> diff(y,x,2) ans = 2/(x + 1)^2 - (2*(x - 1))/(x + 1)^3 >> syms x y >> y=2*log(x)+sin(pi*x/2)^2;>> dxdy=diff(y) dxdy = 2/x + pi*cos((pi*x)/2)*sin((pi*x)/2)zhi=subs(dxdy,1)zhi = 226 求函数y=的二阶导数01cos 2lim sin x x x x →-11x x-+>> syms x y>> y=(1-x)/(1+x);>> diff(y,x,2) ans = 2/(x + 1)^2 - (2*(x - 1))/(x + 1)^327 求函数的导数;>> syms x y >> y=((x-1)^3*(3+2*x)^2/(1+x)^4)^0.2;>> diff(y) ans = (((8*x + 12)*(x - 1)^3)/(x + 1)^4 + (3*(2*x + 3)^2*(x - 1)^2)/(x + 1)^4 - (4*(2*x + 3)^2*(x - 1)^3)/(x + 1)^5)/(5*(((2*x + 3)^2*(x - 1)^3)/(x + 1)^4)^(4/5))28在区间()内求函数的最值.,-∞+∞43()341f x x x =-+>> f='-3*x^4+4*x^3-1';>> [x,y]=fminbnd(f,-inf,inf)x =NaN y = NaN >> f='3*x^4-4*x^3+1';>> [x,y]=fminbnd(f,-inf,inf)x = NaN y = NaN29在区间(-1,5)内求函数发的最值.()(f x x =->> f='(x-1)*x^0.6';>> [x,y]=fminbnd(f,-1,5)x =0.3750y = -0.3470>> >> f='-(x-1)*x^0.6';>> [x,y]=fminbnd(f,-1,5)x = 4.9999y = -10.505930 求不定积分(ln 32sin )x x dx -⎰(ln 32sin )x x dx -⎰>> syms x y >> y=log(3*x)-2*sin(x);>> int(y) ans = 2*cos(x) - x + x*log(3) + x*log(x)31求不定积分2sin x e xdx ⎰>> syms x y>> y=exp(x)*sin(x)^2;>> int(y)ans =-(exp(x)*(cos(2*x) + 2*sin(2*x) - 5))/1032. 求不定积分 >> syms x y >> y=x*atan(x)/(1+x)^0.5;>> int(y)Warning: Explicit integral could not be found. ans = int((x*atan(x))/(x + 1)^(1/2), x)33.计算不定积分2(2cos )x x x e dx --⎰>> syms x y >> y=1/exp(x^2)*(2*x-cos(x));>> int(y)Warning: Explicit integral could not be found. ans = int(exp(-x^2)*(2*x - cos(x)), x)34.计算定积分10(32)xe x dx -+⎰>> syms x y >> y=exp(-x)*(3*x+2);>> int(y,0,1) ans = 5 - 8*exp(-1)10(32)x e x dx -+⎰35.计算定积分0x →120(1)cos x arc xdx+⎰>> syms y x>> y=(x^2+1)*acos(x);>> int(y,0,1)ans =11/936.计算定积分10cos ln(1)x x dx +⎰>> syms x y >> y=(cos(x)*log(x+1));>> int(y,0,1)Warning: Explicit integral could not be found. ans = int(log(x + 1)*cos(x), x == 0..1)37计算广义积分;2122x x dx +∞++-∞⎰>> syms y x >> y=(1/(x^2+2*x+2));>> int(y,-inf,inf) ans = pi 38.计算广义积分;20x dx x e +∞-⎰>> syms x y>> y=x^2*exp(-x);>> int(y,0,+inf)ans =2。
数学建模试题及答案

1. 食品厂用三种原料生产两种糖果,糖果的成分要求和销售价见表1。
各种原料的可供量和成本见表2。
该厂根据订单至少需要生产600公斤高级奶糖,800公斤水果糖,为求最大利润,试建立线性规划模型并求解。
2.某商业公司计划开办5家新商店。
为了尽早建成营业,商业公司决定由5家建筑公司分别承建。
已知建筑公司i A (5,4,3,2,1=i )对新商店j B (5,4,3,2,1=j )的建造费用的报价(万元)为ij c (5,4,3,2,1,=j i ),见表3。
商业公司应当对5家建筑公司怎样分配建造任务,才能使总的建造费用最少?
3.求解下列方程的三个实根
x x 24=
提示:首先在21≤≤-x 和172≤≤x 两个不同区域中绘制函数图形。
4\.求图1所示网络中s v 到t v 的最短路径及长度。
2
v 5
t
图1 网络图
5.某商业公司计划开办5家新商店。
为了尽早建成营业,商业公司决定由5家建筑公司分别承建。
已知建筑公司i A (5,4,3,2,1=i )对新商店j B (5,4,3,2,1=j )的建造费用的报价(万元)为ij c (5,4,3,2,1,=j i ),见表3。
商业公司应当对5家建筑公司怎样分配建造任务,才能使总的建造费用最少?。
《数学建模》练习题库及答案.doc
一、名词解释1.Table命令的使用格式;2.Solve命令的使用格式;3.Do命令的使用格式;4.Plot命令的使用格式;5.ListPlot命令的使用格式;6.Reduce命令的使用格式;7.Expand命令的使用格式;8.FindRoot命令的使用格式;9.Switch命令的使用格式;lO.ConstrainedMin命令的使用格式;11 .Factor命令的特点与几种使用格式。
12.Clear命令的特点与使用格式二、计算题1. 1959年8月4日是星期几,这一天与2001年12月4日之间共有多少天?2.求我国北京市的地理经纬度。
3.北美地区有几个国家?写出它们的名字。
4.求解递归关系式a” = 3% _2a”_2,ao =1,4 = 2。
5.求斐波那契(Fibonacci)数列Fibonacci[n]从n=l至【Jn = 50的值。
6.分别以0.1、0.01、0.001为误差上限,将J方化成近似分数。
7 .求下列矩阵的特征值与对应的特征向量:13•求解方程7% -和"—张+ 1X 14.求1+ 28+38+...+n 8的简洁表达式。
15.求Pell 方程.r 2 -234y 2 -1的最小正整数解。
16.将16进制的数字20转化为10进制的数字。
17.求下列矩阵的行列逆矩阵与转置矩‘1 2 3、A= 2 3 1、3 1 2,8.求多项式 f=( X1 + X2 +X3 + X4 + X5严中 Xi 3 x 23 X35 X42 X55 的系数。
9•求208素因子分解。
10. 用Lindo 求解下列整数线性规划问题。
max / = 20 兀 1 +10%兀1 +兀2 +兀3 = 30y, + y 2 + = 2020x l +10% = 30X 2 + 20y 2 = 25 x 3 + 15y 3s.tA 20兀i +10% <20*30 + 10*2030兀2+20y2 <30*30 + 20*20 25兀3+15儿 <25*30 + 15*20 x t , y j > 0,integers11. 求中国香港的地理经纬度。
数学建模习题答案
数学建模部分课后习题解答中国地质大学 能源学院 华文静1.在稳定的椅子问题中,如设椅子的四脚连线呈长方形,结论如何? 解:模型假设(1) 椅子四条腿一样长,椅脚与地面接触处视为一点,四脚的连线呈长方形 (2) 地面高度是连续变化的,沿任何方向都不会出现间断(没有像台阶那样的情况),即从数学角度来看,地面是连续曲面。
这个假设相当于给出了椅子能放稳的必要条件(3) 椅子在任何位置至少有三只脚同时着地。
为了保证这一点,要求对于椅脚的间距和椅腿的长度而言,地面是相对平坦的。
因为在地面上椅脚间距和椅腿长度的尺寸大小相当的范围内,如果出现深沟或凸峰(即使是连续变化的),此时三只脚是无法同时着地的。
模型建立在上述假设下,解决问题的关键在于选择合适的变量,把椅子四只脚同时着地表示出来。
首先,引入合适的变量来表示椅子位置的挪动。
生活经验告诉我们,要把椅子通过挪动放稳,通常有拖动或转动椅子两种办法,也就是数学上所说的平移与旋转变换。
然而,平移椅子后问题的条件没有发生本质变化,所以用平移的办法是不能解决问题的。
于是可尝试将椅子就地旋转,并试图在旋转过程中找到一种椅子能放稳的情形。
注意到椅脚连线呈长方形,长方形是中心对称图形,绕它的对称中心旋转180度后,椅子仍在原地。
把长方形绕它的对称中心旋转,这可以表示椅子位置的改变。
于是,旋转角度θ这一变量就表示了椅子的位置。
为此,在平面上建立直角坐标系来解决问题。
设椅脚连线为长方形ABCD,以对角线AC 所在的直线为x 轴,对称中心O 为原点,建立平面直角坐标系。
椅子绕O 点沿逆时针方向旋转角度θ后,长方形ABCD 转至A1B1C1D1的位置,这样就可以用旋转角)0(πθθ≤≤表示出椅子绕点O 旋转θ后的位置。
其次,把椅脚是否着地用数学形式表示出来。
当椅脚与地面的竖直距离为零时,椅脚就着地了,而当这个距离大于零时,椅脚不着地。
由于椅子在不同的位置是θ的函数,因此,椅脚与地面的竖直距离也是θ的函数。
数学建模试题答案

数学模型试题参考答案一、填空题1.物质模型(形象模型)和理想模型(抽象模型)2.机理分析和测试分析3.人口增长率.4.阻滞增长模型.5.MATLAB 和MATHEMATICA .二、问答题1.对于现实世界的一个特定对象,为了一个特定目的,根据特有的内在规律,做出一些必要的简化假设,运用适当的数学工具,得到一个数学结构.2.模型准备,模型假设,模型构成,模型求解,模型分析,模型检验,模型应用.3.逼真性与可行性,渐进性,强健性,可转移性,非预制性,条理性,技艺性,局限性.4.原型是指人们在现实世界里关心、研究或者从事生产、管理的实际对象.模型是指为了特定目的将原型的某一部分信息简缩、提炼而构成的原型替代物.三、建模题1.模型构成记第k 次渡河前此案的商人数为k x ,随从人数为k y ,,,2,1 =k 3,2,1,0,=k k y x .将二维向量),(k k k y x s =定义为状态,安全渡河条件下的状态集合称为允许状态集合,记作S . {}2,1;3,2,1,0,3;3,2,1,0,0|),(=======y x y x y x y x S ,不难验证,S 对此岸和彼岸都是安全的.记第k 次渡船上商人数为k u ,随从数为k v .将二维向量),(k k k v u d =定义为决策,允许决策集合记作D ,由小船的容量可知{}2,1,0,,21|),(=≤+≤=v u v u v u D .因为k 为奇数时船从此岸驶向彼岸,k 为偶数时船从彼岸驶向此岸,所以状态k s 随决策k d 变化的规律为k k k k d s s )1(1-+=+上式称为状态转移率.这样,制定安全渡河方案归结为如下的多步决策模型:求决策D d k ∈),2,1(n k =,使状态S s k ∈按照状态转移率,由初始状态)3,3(1=s 经有限步n 到达状态)0,0(1=+n s .2.模型假设1. 椅子四条腿一样长,椅脚与地面接触处可视为一个点,四脚的连线呈正方形.2. 地面高度是连续变化的,沿任何方向都不会出现间断,即地面可视为数学上的连续曲面.3. 对于椅脚的间距和椅腿的长度而言,地面是相对平坦的,使椅子在任何位置上至少有三只脚同时着地.模型构成首先要用变量表示椅子的位置.用旋转角度这一变量表示椅子的位置.对角线AC 与x 轴重合,椅子绕中心点O 旋转角度θ后,正方形ABCD 转至D C B A '''',所以对角线AC 与x 轴的夹角θ表示了椅子的位置.虽然椅子有四只脚,因而有四个距离,但是由于正方形的对称性,只要设两个距离函数就行了.记A ,C 两脚与地面距离之和为)(θf ,B ,D 两脚与地面距离之和为)(θg )0)(),((≥θθg f 由假设2,f 和g 都是连续函数.由假设3,椅子在任何位置至少有三只脚着地,所以对于任意的)(θf 和)(θg 中至少有一个为零.当0=θ时不妨设0)(=θg ,0)(>θf .这样,改变椅子的位置使四只脚同时着地,就归纳为证明如下的数学命题:已知)(θf 和)(θg 是θ的连续函数,对任意θ,0)()(=⋅θθg f ,且0)0(=g ,0)0(>f ,证明存在0θ,使0)()(00==θθg f .将椅子旋转90度,对角线AC 与BD 互换,由0)0(=g 和0)0(>f 可知0)2/(>πg 和0)2/(=πf .令)()()(θθθg f h -=,则0)0(>h 和0)2/(<πh .由f 和g 的连续性知h 也是连续函数.根据连续函数的基本性质,必存在0θ)2/0(0πθ<<使0)(0=θh ,即)()(00θθg f =,因为0)()(00=⋅θθg f ,所以0)()(00==θθg f .用数学解释了这个现象.。
数学模型习题参考解答
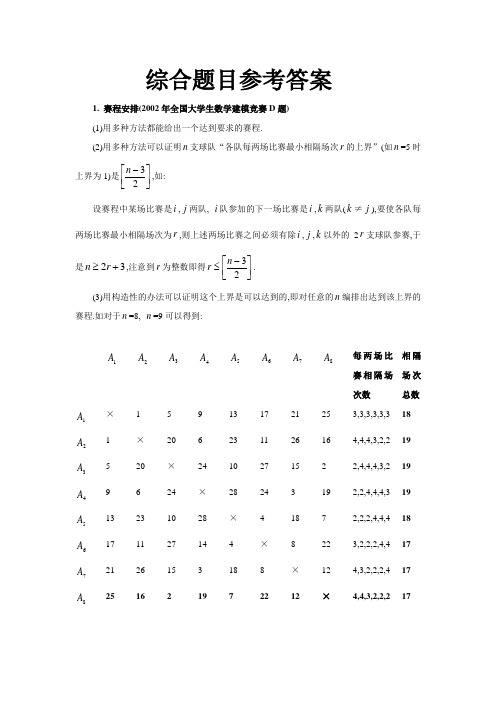
综合题目参考答案1. 赛程安排(2002年全国大学生数学建模竞赛D 题) (1)用多种方法都能给出一个达到要求的赛程.(2)用多种方法可以证明n 支球队“各队每两场比赛最小相隔场次r 的上界”(如n =5时上界为1)是⎥⎦⎤⎢⎣⎡-23n ,如: 设赛程中某场比赛是i ,j 两队, i 队参加的下一场比赛是i ,k 两队(k ≠j ),要使各队每两场比赛最小相隔场次为r ,则上述两场比赛之间必须有除i ,j ,k 以外的2r 支球队参赛,于是32+≥r n ,注意到r 为整数即得⎥⎦⎤⎢⎣⎡-≤23n r . (3)用构造性的办法可以证明这个上界是可以达到的,即对任意的n 编排出达到该上界的赛程.如对于n =8, n =9可以得到:1A 2A 3A 4A 5A 6A 7A 8A每两场比赛相隔场次数相隔场次总数 1A × 1 5 9 13 17 21 25 3,3,3,3,3,3 18 2A 1 × 20 6 23 11 26 16 4,4,4,3,2,2 19 3A5 20 × 24 10 27 15 2 2,4,4,4,3,2 19 4A 96 24 × 28 24 3 19 2,2,4,4,4,3 19 5A 13 23 10 28 × 4 187 2,2,2,4,4,4 18 6A 17 11 27 14 4 × 8 22 3,2,2,2,4,4 17 7A 21 26 15 3 18 8 × 12 4,3,2,2,2,4 17 8A25 1621972212×4,4,3,2,2,2171A2A3A 4A5A 6A 7A 8A 9A每两场比赛相隔场次数 相隔场 次总数1A × 36 6 31 11 26 16 21 1 4,4,4,4,4,4,4, 28 2A 36 × 2 27 7 22 12 17 32 4,4,4,4,4,4,3 27 3A6 2 × 35 15 30 20 25 10 3,3,4,4,4,4,4 26 4A 31 27 35 × 3 18 8 13 23 4,4,4,4,3,3,3 25 5A 11 7 15 3 × 34 24 29 19 3,3,3,3,4,4,4 24 6A 26 22 30 18 34 × 4 9 14 4,4,3,3,3,3 23 7A 16 12 20 8 24 4 × 33 28 3,3,3,3,3,3,4 22 8A 21 17 25 13 29 9 33 × 5 3,3,3,3,3,3,3, 21 9A13210231914285×3,4,3,4,3,4,324可以看到, n =8时每两场比赛相隔场次数只有2,3,4, n =9时每两场比赛相隔场次数只有3,4,以上结果可以推广,即n 为偶数时每两场比赛相隔场次数只有22-n ,12-n ,2n,n 为奇数时只有23-n ,21-n . (4)衡量赛程优劣的其他指标如平均相隔场次 记第i 队第j 个间隔场次数为ij c ,2,2,1,,,2,1-==n j n i ,则平均相隔场次为∑∑=-=-=n i n j ij c n n r 121)2(1r 是赛程整体意义下的指标,它越大越好.可以计算n =8,n =9的r ,并讨论它是否达到上界.相隔场次的最大偏差 定义||,r c Max f ij j i -=∑-=--=21|)2(|n j ij r n c Max gf 为整个赛程相隔场次的最大偏差,g 为球队之间相隔场次的最大偏差,它们都是越小越好.可以计算n =8,n =9的f ,g ,并讨论它是否达到上界.参考文献工程数学学报第20卷第5期2003 2. 影院座位设计建立满意度函数),(βαf ,可以认为α和β无关, ()()βαβαh g f -=),(,g ,h 取尽量简单的形式,如αα=)(g ;0)(=βh (030≤β),0)(h h =β)30(0>β. (1)可030≤β将作为必要条件,以α最大为最佳座位的标准.在上图中以第1排座位为坐标原点建立坐标轴x ,可以得到⎪⎭⎫⎝⎛+----⎪⎭⎫ ⎝⎛+--=⎪⎭⎫⎝⎛+--=d x x h c H d x x c H d x x c H θθαθβtan arctan tan arctan ,tan arctan β是x 的减函数.可得x ≈1.7m,即第3(或4)排处030=β.又通过计算或分析可知α也是x 的减函数,所以第3(或4)排处是最佳座位.(2)设定一个座位间隔l (如0.5m), x 从0(或030≤β处)到d D -按l 离散,对于)20~0(00θ计算α的平均值,得020=θ时其值最大.(3)可设地板线是x 的二次曲线2bx ax +,寻求a ,b 使α的平均值最大. 实际上,还应考虑前排不应挡住后排的视线.3.节水洗衣机(1996年全国大学生数学建模竞赛B 题)该问题不要求对洗衣机的微观机制(物理、化学方面)深入研究,只需要从宏观层次去把握.宏观上洗衣的基本原理是用洗涤剂通过漂洗把吸附在衣物上的污物溶于水中,再脱去污水带走污物;洗衣的过程是通过“加水——漂洗——脱水”程序的反复运行,使残留在衣物的污物越来越少,直到满意的程度;洗涤剂也是不希望留在衣物上的东西,可将“污物”定义为衣物上原有污物与洗涤剂的总和.假设每轮漂洗后污物均匀地溶于水中;每轮脱水后衣物含水量为常数c .0x ~初始污水量,~k u 第k 轮加水量,k x ~第k 轮脱水量),,2,1( =k .设每轮脱水前后污物在水中的浓度不变.于是cx c u x c xc u x c x u x n n n =+=+=--11221110,,, , 得到)()(210c u c u u c x x n n n ++=. 在最终污物量与初始污物量之比0/x x n 小于给定的清洁度条件下,求各轮加水量k u ),,1(n k =,使总用水量最小,即∑=nk k u u Min k 1()ε<++)(..21c u c u u c t s n n等价于)()(21c u c u u Min n u k +++++α=++)()(..21c u c u u t s na 为常数可得c u c u u n +==+= 21,即第n ~2轮加水量u u k =(常数),第1轮加水量c u u +=1.令cx u =,问题简化为nx Min u n ,ε<⎪⎭⎫ ⎝⎛+nx t s 11.. 其解为0→x ,即0→u ,而∞→n .这与实际上是不合理的.应该加上对u 的限制:21v u v ≤≤.则得max min n n n ≤≤,其中 max min n n n ≤≤,1)/1ln(2min +⎥⎦⎤⎢⎣⎡+=c v n α这样,n为有限的几个数,可一一比较,具体数据计算从略.参考文献:《数学的实践与认识》第27卷第1期,19974.教师工资调整方案(1995年美国大学生数学建模竞赛B 题)题目对职称提升年限表述得不甚清楚(如未提及助理教授的提升),教龄也未区分是什么职称下工作的年限,所以应该作出一些相应的简化假设.按所给信息,工资仅取决于职称和教龄.建立新方案的一种办法是将职称折合成教龄,如定义x=教龄t+7×k (对于讲师、助理教授、副教授、教授,k 分别取值0,1,2,3),然后寻求工资函数I(x),使之满足题目的要求,如I(0)=27000,I(7)=32000等,以及x 较大时022<dxId .另一种办法是职称、教龄分别对待,工资函数J(k,t)从多种函数中选择,如最简单的线性函数J(k,t)=k k k k b a t b a ,,+(k=0,1,2,3)根据一定条件确定.按照第一种办法得到的新工资方案,以职称和教龄综合指标为x 的教师的工资都应为I(x),而人们的目前工资会低于或高于它.根据题目要求,高工资不应降低,低工资则应逐渐提高,尽快达到理想值I(x).需要做的只是根据每人(目前)工资与(理想值的)差额,制定学校提供的提薪资金的分配方案.它应该是简单、合理、容易被人接受的.按以上原则可以建立不同的模型,应通过检验比较其恶劣.检验可基于题目所给数据,按照提薪计划运行若干年,考察接近理想方案的情况,即用过渡时期的情况检验模型;也可进行随机模拟,按照一定规则随机产生数据(可以包括聘用、提职、解聘、退休的人数和时间等),再按照提薪计划运行,考察接近理想方案的情况.参考文献:叶其孝,《大学生数学建模竞赛辅导教材》(四),湖南教育出版社,2001 5. 一个飞行管理问题(1995年全国大学生数学建模竞赛A 题) 设ij a 为第i 架飞机与第j 架飞机的碰撞角(即)8arcsin(ijij r a =其中ij r 为这两架飞机连线的长度),ij β为第i 架飞机相对于第j 架飞机的相对速度(矢量)与这两架飞机连线(从i 指向j 的矢量)的夹角(以连线矢量为基准,逆时针方向为正,顺时针方向为负),i θ为第架飞机飞行方向角调整量.本问题中的优化目标函数可以有不同的形式:如使所有飞机的最大调整量最小;所有飞机的调整量绝对值之和最小等.以所有飞机的调整量绝对值之和最小,可以得到如下的数学规划模型:∑=61i i Min θs.t. ,)(21ij j i ij a >++θθβ j i j i ≠=,6,,1,30≤i θ , 6,,1 =i为了利用LINGO 求解这个数学规划模型,可以首先采用其他数学软件计算出ij α和ij β.其实,ij α和ij β也是可以直接使用LINGO 来计算的,这相当于解关于ij α和ij β的方程,只是解方程并非LINDO 软件的特长,这里我们作为一个例子,看看如何利用LINGO 计算ij α,可输入如下模型到LINGO 求解ij α:MIDEL : 1]SETS:2] PLANE/1..6/:x0,y0; 3] link(plane,plane):alpha,sin2: 4]ENDSETS5] @FOR(LINK(I,J)|I#NE#J:6] sin2(I,J)=64/((X0(I)-X0(J))*(X0(I)-X0(J))+ 7] (Y0(I)-Y0(J))*(Y0(I)-Y0(J))); 8] );9] @FOR(LINK(I,J)|I#NE#J:10] (@SIN(alpha*3./180.0))^2=SIN2; 11] ); 12]DATA:13] X0=150,85,150,145,130,0; 14] Y0=140,85,155,50,150,0; 15]endata END 计算结果如下:ija j=1 2 3 4 5 6i =1 0.000 0 5.391232.2315.091820.96342.23452 5.391 2 0.0000 4.804 0 6.61355.807 9 3.81593 32.2310 4.8040.000 0 4.364722.83372.12554 5.091 8 6.6135 4.364 7 0.0004.4.537 2.98985 20.9634 5.807922.83374.53770.000 0 2.30986 2.234 5 3.8159 2.125 5 2.98982.309 8 0.000ijβ也可类似地利用LINGO求得,计算结果如下:ijβj=1 2 3 4 5 6i =1 0.000109.263 6-128.250 024.179 8173.065 114.474 92 109.263 60.000 0-88.871 1-42.243 6-92.304 89.000 03 -128.250 0-88.871 10.00012.476 3-58.786 20.310 84 24.179 8-42.243 612.476 30.000 05.969 2-3.525.65 173.065 1-92.304 8-58.786 25.969 20.000 01.914 46 14.479.000.310 -3.5 1.910.04 9 0 0 8 256 4 4 00 0于是,该飞机管理的数学规划模型可如下输入LINGO求解:MODEL:1]SETS2] plane/1..6/:cita:3] link(plane,plane):alpha,beta;4]ENDSETS5] min=@sum(plane:@abs(cita));6] @for(plane(I):7] @bnd(-30,cita(I),30);8] );9] @fpr(link(I,j)|I#NE#J:10] @ABS(beta(I,J)+0.5*cit(I)+0.5*cita(J))11] >alpha(I,J);12] );13]DATA:14] A;[JA=0.000 0 5.391.2…..…2.309 8 0.000 020] ;21] BETA=0.000 010 9.263 6………1.914 4 0.000 027] ;28]enddataEND[注] alpha,beta中数据略去,见上面表格.求解结果如下:OPTIMUM FOUND AT STEP 197SOLUTION OBJECTIVE VALUE= 3.630V ARIABLE V ALUE REDUCED COSTCITA(1) 0.E-06 -1.000 000 CITA(2) -0.E-05 -0.715 033 4CITA(3) 2.557 866 1.000 000 CITA(4) -0.E-04 0.E+00 CITA(5) 0.E-05 -1.000 000 CITA(6) 1.071 594 0.E+00 ………. (以下略)由此可知最优解为:︒︒≈≈07.1,56.263θθ (其它调整角度为0).评注:如果将目标改为最大调整量最小,则可进一步化简得到线形规划模型,也可用LINDO 或LINGO 求解.参考文献:《数学的实践与认识》第26卷第1期,1996 6. 降落伞的选择这个优化问题的决策变量是降落伞数量n 和每一个伞的半径r ,可先将n 和r 看作连续变量,建立优化模型,求得最优解后,再按题目要求作适当调整.目标函数之降落伞的费用,可以根据表1数据拟合伞面费用1C 与伞的半径r 的关系。
数学建模课后习题答案
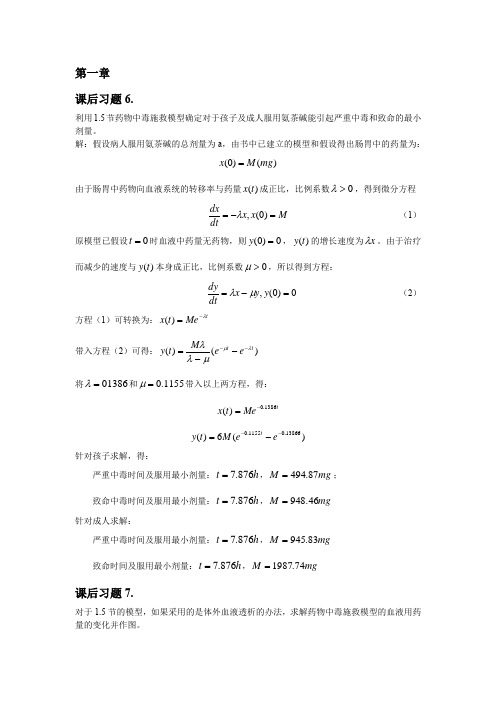
第一章 课后习题6.利用1.5节药物中毒施救模型确定对于孩子及成人服用氨茶碱能引起严重中毒和致命的最小剂量。
解:假设病人服用氨茶碱的总剂量为a ,由书中已建立的模型和假设得出肠胃中的药量为:)()0(mg M x =由于肠胃中药物向血液系统的转移率与药量)(t x 成正比,比例系数0>λ,得到微分方程M x x dtdx=-=)0(,λ (1) 原模型已假设0=t 时血液中药量无药物,则0)0(=y ,)(t y 的增长速度为x λ。
由于治疗而减少的速度与)(t y 本身成正比,比例系数0>μ,所以得到方程:0)0(,=-=y y x dtdyμλ (2) 方程(1)可转换为:tMe t x λ-=)(带入方程(2)可得:)()(t t e e M t y λμμλλ----=将01386=λ和1155.0=μ带入以上两方程,得:t Me t x 1386.0)(-= )(6)(13866.01155.0---=e e M t y t针对孩子求解,得:严重中毒时间及服用最小剂量:h t 876.7=,mg M 87.494=; 致命中毒时间及服用最小剂量:h t 876.7=,mg M 8.4694= 针对成人求解:严重中毒时间及服用最小剂量:h t 876.7=,mg M 83.945= 致命时间及服用最小剂量:h t 876.7=,mg M 74.1987=课后习题7.对于1.5节的模型,如果采用的是体外血液透析的办法,求解药物中毒施救模型的血液用药量的变化并作图。
解:已知血液透析法是自身排除率的6倍,所以639.06==μut e t x λ-=1100)(,x 为胃肠道中的药量,1386.0=λ )(6600)(t t e e t y λμ---=1386.0,639.0,5.236)2(,1100,2,====≥-=-λλλu z e x t uz x dtdzt 解得:()2,274.112275693.01386.0≥+=--t e e t z t t用matlab 画图:图中绿色线条代表采用体外血液透析血液中药物浓度的变化情况。
数学建模课后习题答案

方程及方程组的求解1、路灯照明问题。
在一条20m 宽的道路两侧,分别安装了一只2kw 和一只3kw 的路灯, 它们离地面的高度分别为5m 和6m 。
在漆黑的夜晚,当两只路灯开启时 (1)两只路灯连线的路面上最暗的点和最亮的点在哪里? (2)如果3kw 的路灯的高度可以在3m 到9m 之间变化,如何路面上最暗点的亮度最大? (3)如果两只路灯的高度均可以在3m 到9m 之间变化,结果又如何?解:根据题意,建立如图模型P1=2kw P2=3kw S=20m 照度计算公式:2sin r p k I α= (k 为照度系数,可取为1;P 为路灯的功率)(1)设Q(x,0)点为两盏路灯连线上的任意一点,则两盏路灯在Q 点的照度分别为21111sin R p k I α= 22222sin R p k I α=22121x h R += 111sin R h =α22222)(x s h R -+= 222sin R h =αQ 点的照度:3232322222322111))20(36(18)25(10))((()(()(x x x s h h P x h h P x I -+++=-+++=X S P1 P2R1 α1α2 Q yx OR2 h1 h2要求最暗点和最亮点,即为求函数I(x)的最大值和最小值,所以应先求出函数的极值点5252522222522111'))20(36()20(54)25(30))(()(3)(3)(x x x x x s h x s h P x h x h P x I -+-++-=-+-++-=利用MATLAB 求得0)('=x I 时x 的值代码:s=solve('(-30*x)/((25+x^2)^(5/2))+(54*(20-x))/((36+(20-x)^2)^(5/2))'); s1=vpa(s,8); s1运行结果: s1 =19.97669581 9.338299136 8.538304309-11.61579012*i .2848997038e-1 8.538304309+11.61579012*i因为x>=0,选取出有效的x 值后,利用MATLAB 求出对应的I(x)的值,如下表:x 0 0.028489970 9.3382991 19.976695 20 I(x) 0.081977160.081981040.018243930.084476550.08447468综上,x=9.33m 时,为最暗点;x=19.97m 时,为最亮点。
《数学建模》习题及参考答案 第一章 建立数学模型

第一章部分习题3(5). 决定十字路口黄灯亮的时间长度.4. 在1.3节“椅子能在不平的地面上放稳吗”的假设条件中,将四角的连线呈正方形改为长方形,其余不变,试构造模型并求解.5. 模仿1.4节商人过河问题中的状态转移模型,作下面这个众所周知的智力游戏:人带着猫、鸡、米过河,船除希望要人计划之外,至多能载猫、鸡、米三者之一,而当人不在场时猫要吃鸡、鸡要吃米,设计一个安全过河方案,并使渡河次数尽量地少.6. 利用1.5节表1和表3给出的1790-2000年的美国实际人口资料建立下列模型: (1) 分段的指数增长模型. 将时间分为若干段,分别确定增长率r. (2) 阻滞增长模型. 换一种方法确定固有增长率r 和最大容量x m .7. 说明1.5节中Logistic 模型(9)可以表示为()()01t t r mex t x --+=,其中t 0是人口增长出现拐点的时刻,并说明t 0与r ,x m 的关系.8. 假定人口的增长服从这样的规律:时刻t 的人口为x (t),t 到t +△t 时间内人口的增量与x m -x (t)成正比(其中为x m 最大容量). 试建立模型并求解. 作出解的图形并与指数增长模型、阻滞增长模型的结果进行比较.9(3). 甲乙两站之间有电车相通,每隔10分钟甲乙两站相互发一趟车,但发车时刻不一定相同。
甲乙之间一中间站丙,某人每天在随机的时刻到达丙站,并搭乘最先经过丙站的那趟车,结果发现100天中约有90天到达甲站,约有10天到达乙站。
问开往甲乙两站的电车经过丙站的时刻表是如何安排的。
参考答案3(5). 司机看到黄灯后停车要有一定的刹车距离1s ,设通过十字路口的距离为2s ,汽车行驶速度为v ,则黄灯的时间长度t 应使距停车线1s 之内的汽车能通过路口,即()vs s t 21+≈其中s 1可由试验得到,或按照牛顿第二定律解运动方程,进一步可考察不同车重、不同路面及司机反应灵敏程度等因素的影响.4. 相邻两椅脚与地面距离之和分别定义为()()θθg f 和,将椅子旋转ο180,其余作法与1.3节相同.5. 人、猫、鸡、米分别记为4,3,2,1=i ,当i 在此岸时记1=i x ,否则记0=i x ,则此岸的状态可用()4321,,,x x x x s =表示。
数学建模题目及答案
09级数模试题1. 把四只脚的连线呈长方形的椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然后稍微挪动几次,就可以使四只脚同时着地,放稳了。
试作合理的假设并建立数学模型说明这个现象。
(15分)解:对于此题,如果不用任何假设很难证明,结果很可能是否定的。
因此对这个问题我们假设 :(1)地面为连续曲面(2)长方形桌的四条腿长度相同(3)相对于地面的弯曲程度而言,方桌的腿是足够长的(4)方桌的腿只要有一点接触地面就算着地。
那么,总可以让桌子的三条腿是同时接触到地面。
现在,我们来证明:如果上述假设条件成立,那么答案是肯定的。
以长方桌的中心为坐标原点作直角坐标系如图所示,方桌的四条腿分别在A 、B 、C 、D 处,A 、B,C 、D的初始位置在与x 轴平行,再假设有一条在x 轴上的线ab,则ab 也与A 、B ,C 、D 平行。
当方桌绕中心0旋转时,对角线 ab 与x 轴的夹角记为θ。
容易看出,当四条腿尚未全部着地时,腿到地面的距离是不确定的。
为消除这一不确定性,令 ()f θ为A 、B 离地距离之和,()g θ为C 、D 离地距离之和,它们的值由θ唯一确定。
由假设(1),()f θ,()g θ均为θ的连续函数。
又由假设(3),三条腿总能同时着地, 故()f θ()g θ=0必成立(∀θ)。
不妨设(0)0f =,(0)0g >g (若(0)g 也为0,则初始时刻已四条腿着地,不必再旋转),于是问题归结为:已知()f θ,()g θ均为θ的连续函数,(0)0f =,(0)0g >且对任意θ有00()()0f g θθ=,求证存在某一0θ,使00()()0f g θθ=。
证明:当θ=π时,AB 与CD 互换位置,故()0f π>,()0g π=。
作()()()h f g θθθ=-,显然,()h θ也是θ的连续函数,(0)(0)(0)0h f g =-<而()()()0h f g πππ=->,由连续函数的取零值定理,存在0θ,00θπ<<,使得0()0h θ=,即00()()f g θθ=。
数学模型试题及答案解析
数学模型试题及答案解析一、单项选择题(每题3分,共30分)1. 以下哪个不是数学模型的特征?A. 抽象性B. 精确性C. 可验证性D. 复杂性答案:D2. 数学模型的建立通常不包括以下哪个步骤?A. 定义问题B. 收集数据C. 建立假设D. 验证结果答案:D3. 在数学建模中,以下哪个不是模型分析的方法?A. 定性分析B. 数值分析C. 图形分析D. 统计分析答案:D4. 数学模型的验证不包括以下哪项?A. 内部一致性检验B. 与已知结果比较C. 与实验数据比较D. 模型的优化答案:D5. 在数学建模中,以下哪个不是模型的类型?A. 确定性模型B. 随机模型C. 动态模型D. 静态模型答案:D6. 以下哪个是数学模型的典型应用领域?A. 经济学B. 物理学C. 生物学D. 所有以上答案:D7. 数学模型的建立过程中,以下哪个步骤是不必要的?A. 问题定义B. 假设建立C. 模型求解D. 模型展示答案:D8. 数学模型的分析中,以下哪个不是常用的工具?A. 微分方程B. 线性代数C. 概率论D. 量子力学答案:D9. 在数学建模中,以下哪个不是模型的评估标准?A. 准确性B. 可解释性C. 简洁性D. 复杂性答案:D10. 数学模型的建立过程中,以下哪个步骤是至关重要的?A. 问题定义B. 数据收集C. 模型求解D. 模型验证答案:A二、多项选择题(每题5分,共20分)11. 数学模型的建立过程中,以下哪些步骤是必要的?A. 问题定义B. 数据收集C. 模型求解D. 模型验证答案:ABCD12. 数学模型的类型包括以下哪些?A. 确定性模型B. 随机模型C. 动态模型D. 静态模型答案:ABCD13. 数学模型的分析方法包括以下哪些?A. 定性分析B. 数值分析C. 图形分析D. 统计分析答案:ABCD14. 数学模型的验证包括以下哪些?A. 内部一致性检验B. 与已知结果比较C. 与实验数据比较D. 模型的优化答案:ABC三、填空题(每题4分,共20分)15. 数学模型的建立通常包括定义问题、______、建立假设和模型求解四个步骤。
数学建模习题及答案
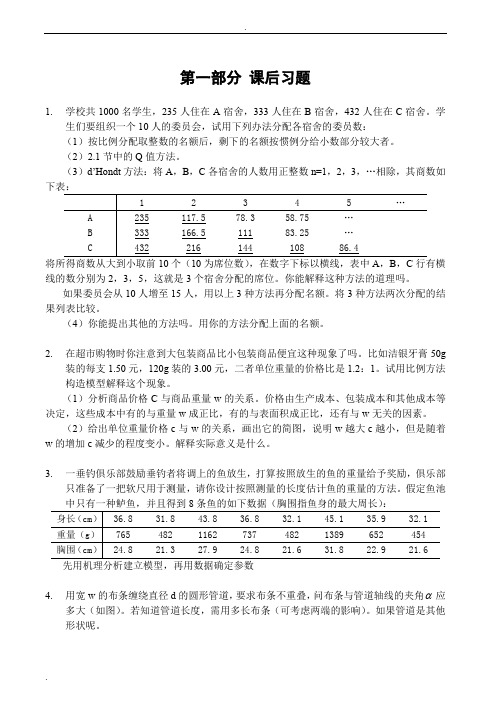
第一部分课后习题1.学校共1000名学生,235人住在A宿舍,333人住在B宿舍,432人住在C宿舍。
学生们要组织一个10人的委员会,试用下列办法分配各宿舍的委员数:(1)按比例分配取整数的名额后,剩下的名额按惯例分给小数部分较大者。
(2)2.1节中的Q值方法。
(3)d’Hondt方法:将A,B,C各宿舍的人数用正整数n=1,2,3,…相除,其商数如下表:将所得商数从大到小取前10个(10为席位数),在数字下标以横线,表中A,B,C行有横线的数分别为2,3,5,这就是3个宿舍分配的席位。
你能解释这种方法的道理吗。
如果委员会从10人增至15人,用以上3种方法再分配名额。
将3种方法两次分配的结果列表比较。
(4)你能提出其他的方法吗。
用你的方法分配上面的名额。
2.在超市购物时你注意到大包装商品比小包装商品便宜这种现象了吗。
比如洁银牙膏50g装的每支1.50元,120g装的3.00元,二者单位重量的价格比是1.2:1。
试用比例方法构造模型解释这个现象。
(1)分析商品价格C与商品重量w的关系。
价格由生产成本、包装成本和其他成本等决定,这些成本中有的与重量w成正比,有的与表面积成正比,还有与w无关的因素。
(2)给出单位重量价格c与w的关系,画出它的简图,说明w越大c越小,但是随着w的增加c减少的程度变小。
解释实际意义是什么。
3.一垂钓俱乐部鼓励垂钓者将调上的鱼放生,打算按照放生的鱼的重量给予奖励,俱乐部只准备了一把软尺用于测量,请你设计按照测量的长度估计鱼的重量的方法。
假定鱼池中只有一种鲈鱼,并且得到8条鱼的如下数据(胸围指鱼身的最大周长):先用机理分析建立模型,再用数据确定参数4.用宽w的布条缠绕直径d的圆形管道,要求布条不重叠,问布条与管道轴线的夹角 应多大(如图)。
若知道管道长度,需用多长布条(可考虑两端的影响)。
如果管道是其他形状呢。
5.用已知尺寸的矩形板材加工半径一定的圆盘,给出几种简便、有效的排列方法,使加工出尽可能多的圆盘。
数学建模试题(带答案)
数学建模试题(带答案)第一章4.在1.3节“椅子能在不平的地面上放稳吗”的假设条件中,将四脚的连线呈正方形改为长方形,其余不变。
试构造模型并求解。
答:相邻两椅脚与地面距离之和分别定义为)()(a g a f 和。
f 和g 都是连续函数。
椅子在任何位置至少有三只脚着地,所以对于任意的a ,)()(a g a f 和中至少有一个不为零。
不妨设0)0(,0)0(g >=f 。
当椅子旋转90°后,对角线互换,0π/2)(,0)π/2(>=g f 。
这样,改变椅子的位置使四只脚同时着地。
就归结为证明如下的数学命题:已知a a g a f 是和)()(的连续函数,对任意0)π/2()0(,0)()(,===⋅f g a g a f a 且,0)π/2(,0)0(>>g f 。
证明存在0a ,使0)()(00==a g a f证:令0)π/2(0)0(),()()(<>-=h h a g a f a h 和则, 由g f 和的连续性知h 也是连续函数。
根据连续函数的基本性质,必存在0a (0<0a <π/2)使0)(0=a h ,即0)()(00==a g a f 因为0)()(00=•a g a f ,所以0)()(00==a g a f8第二章7.10.用已知尺寸的矩形板材加工半径一定的圆盘,给出几种简便有效的排列方法,使加工出尽可能多的圆盘。
第三章5.根据最优定价模型 考虑成本随着销售量的增加而减少,则设kx q x q -=0)( (1)k 是产量增加一个单位时成本的降低 ,销售量x 与价格p 呈线性关系0,,>-=b a bp a x (2) 收入等于销售量乘以价格p :px x f =)( (3) 利润)()()(x q x f x r -= (4) 将(1)(2)(3)代入(4)求出ka q kbp pa bp x r --++-=02)(当k q b a ,,,0给定后容易求出使利润达到最大的定价*p 为bakb ka q p 2220*+--=6.根据最优定价模型 px x f =)( x 是销售量 p 是价格,成本q 随着时间增长,ββ,0t q q +=为增长率,0q 为边际成本(单位成本)。
数学建模练习题答案(程序代码)

练习一答案1,x=eye(3,3)x=ones(3,3) :x=zeros(3,3)(3)取整数x=unifrnd(-1,1,3,3);>> x=randint(1,9,[-1,1]);>> x=reshape(x,3,3)取小数>> x=unifrnd(-1,1,3,3);x=-1+(0+2).*rand(3,3)(4)x=normrnd(1,2,3,3);x(find(x>1))=1;x(find(x<1))=02,x=0;y=10;a=fix(x+(y-x)*rand(10,10));寻找b=a>5;c=sum(sum(b))3,a=[0 0 0 0;1 1 0 1;1 1 0 1;1 1 0 1];a(find(sum(abs(a'))==0),:)=[];a’表示转至的意思a是一个列向量a(:,find(sum(abs(a))==0))=[]矩阵是提前给定的4奇数,x=randint(10,10,[0,1000]);randcntodd=length(find(mod(x,2)==1))素数(质数)x=randint(10,10,[0,1000]);cntprime=length(find(isprime(x)))偶数x=randint(10,10,[0,1000]);>> cnteren=length(find(mod(x,2)==0))5,>> x=0:0.25:10;y1=2*x+5;y2=x.^2-3*x+1;plot(x,y1,'y*',x,y2,'r+') plot是画图的命令xlabel('x');ylabel('y');text(2,11,'curve y1'); text是标注text(2.5,-1,'curve y2');>> legend('y1','y2')图例6,[x,y]=meshgrid(0:0.25:4*pi); 曲面z=sin(x)*cos(y)*exp(-sqrt(x.^2+y.^2));mesh(x,y,z) 画等高线7,x=[1 5 8 10 12 5 3];subplot(1,3,1)pie3(x);title('1');subplot(1,3,2)bar3(x);title('2');subplot(1,3,3)bar(x);title('3')8,x=-8:0.5:8;y=[];for x0=x;if x0>=-3&x0<=-1;y=[y,(-x0.^2-4*x0-3)/2];elseif x0>=-1&x0<1y=[y,(-x0.^2+1)];elseif x0>=1&x0<3y=[y,(-x0.^2+4*x0-3)/2];else y=[y,0];endendy9,a=zeros(1,15);b=a;c=a;a(1)=2;a(2)=3;b(1)=1;b(2)=2;for i=3:15a(i)=a(i-1)+a(i-2);b(i)=b(i-1)+b(i-2);end>> format rat有理数形式输出>> c=a./b法二;:x=[2/1 3/2 5/3 8/5 13/8 21/13 34/21 55/34 89/55 144/89 233/144 377/233 610/377 987/610 1597/987];r=sum(x)10,a=unifrnd(10,100,1,20);>> b=floor(a);>> p=mean(b);>> m=find(b<p);>> c=b(m);>> n=find(mod(c,2)==0);>> d=c(n)11,a=primes(100)12,b=0;for i=1:40;b=b+i*(i+1);f(i)=bendf(i)f(40)/(f(30)+f(20))13,a=randi([10,99],1,10);>> b=reshape(a,1,10);>> b=sort(b);>> [b,i]=sort(b,'descend');>> a=b(randperm(length(b)))14,,t=1:10;y=[4.842,4.362,3.754,3.368, 3.169,3.038,3.034,3.016,3.012,3.005]; x1=exp(-t)x2=t.*exp(-t)y1=polyfit(x1,y,1)y1=5.2165*exp(-t)+3.1564y2=polyfit(x2,y,1)y2=5.0273*t.*exp(-t)plot(t,y,t,y1,'r--',t,y2,'gx')15,第一个:建立m文件:function f=jifen1(x)f=exp(-2*x);在命令窗口输入:[z1,n]=quad(@jifen1,0,2)得到结果:z1=0.4908n =25第二个:x=0:0.01:2;z2=exp(2*x);trapz(x,z2)得到结果:ans =26.8000第三个:t=-1:0.01:1;z3=x.^2-3*x+0.5;trapz(x,z3)得到结果:ans =1.6667第四个syms x yF2=int(int(exp(-x^2/2)*sin(x^2+y),x,-2,2),y,-1,1)>> VF2=vpa(F2)161(1),t=0:0.01:25;[x,y]=dsolve('Dx=0.5-x','Dy=x-4*y','x(0)=1','y(0)=-0.5','t')求方程再求图像t=0:0.01:25;x=1/2+1/2*exp(-t);y =1/8+1/6*exp(-t)-19/24*exp(-4*t);plot(t,x,t,y)(2)y=dsolve('D2y*x+(1-5)*Dy+y=0','y(0)=0,Dy(0)=0','x') 17,t=[0 0.3 0.8 1.1 1.6 2.3];y=[0.5 0.82 1.14 1.25 1.35 1.41]; tt=0:0.01:2.3;a=polyfit(t,y,2) 拟合曲线命令yy1=polyval(a,tt); 多项式模拟z1=polyval(a,t);wucha1=sqrt(sum((z1-y).^2)) 均方误差B=[ones(size(t')) exp(-t)' ( t.*exp(-t))']; 指数函数模拟b=B\y'yy2=b(1)+b(2)*exp(-tt)+b(3)*tt.*exp(-tt);z2=b(1)+b(2)*exp(-t)+b(3)*t.*exp(-t);wucha2=sqrt(sum((z2-y).^2))figure(1); 再一个图中画出plot(t,y,'+',tt,yy1,t,z1,'o')18,(1),x=-1:0.01:1;y=exp(x)-1.5*cos(2*pi*x);plot(x,y,'g')hold on>> y0=0;>> plot(x,y0,'k')z=fzero('f',-0.8)z = -0.7985(2)f.mfunction y=f(x);y=exp(x)-1.5*cos(2*pi*x);x=fminsearch('f',-0.2,0.2) 寻找极小值在-0.2到0.2之间x =-0.0166>> x=fminsearch('f',-1,1)x =-1.0062f1.mfunction y=f(x);y=-exp(x)+1.5*cos(2*pi*x);x=fminsearch('f1',0.4,0.6)x =0.5288>> x=fminsearch('f1',-0.6,-0.4)x =-0.4897x1=-1.0062 ;y1=exp(x1)-1.5*cos(2*pi*x1)y1 =-1.1333plot(x1,y1,'*')19,(1)[x1,x2,x3]=solve('10*x1-x2=9','-x1+10*x2-2*x3=7','-3*x1+10*x3=6') (2)法一:function q=myxyz(p)x=p(1);y=p(2);z=p(3);q(1)=sin(x)+y^2+log(z)-7;q(2)=3*x+2^y-z^3+1;q(3)=x+y+z-5;命令窗口:x=fsolve('myxyz',[1 1 1])或xyz0=[1 1 1];>> x=fsolve('myxyz',xyz0)0.5991 2.3959 2.0050法二[x,y,z]=solve('sin(x)+y^2+ln(z)-7=0','3*x+2^y-z^3+1=0','x+y+z-5=0','x ','y','z')20, syms xy=sin(x^2);taylor(y,10)22,22,max=x+2*y;2*x+y-12<=0;3*x-2*y+10>=0;x-4*y+10<=0;End Global optimal solution found.结果分析Objective value: 18.00000 最优值Infeasibilities: 0.000000Total solver iterations: 2Variable Value Reduced CostX 2.000000 0.000000 最优的x,y,解Y 8.000000 0.000000Row Slack or Surplus Dual Price1 18.00000 1.0000002 0.000000 1.1428573 0.000000 -0.42857144 20.00000 0.00000023,model:sets: %定义day/1..7/:a,x;endsetsdata: %赋值a=28 15 24 25 19 31 28;enddatamin=@sum(day:x); %对于day中的每个x的值进行求和的最小值@for(day:@gin(x)); %gin(x)限制x为整数表示对每个x取整都有限制@for(day(i):@sum(day(j):x(j))-x(@mod(i,7)+1)-x(@mod(i+1,7)+1)>=a(i)); End。
数学建模答案(完整版)

数学建模答案(完整版)1 建立一个命令M 文件:求数60.70.80,权数分别为1.1,1.3,1.2的加权平均数。
在指令窗口输入指令edit ,打开空白的M 文件编辑器;里面输入s=60*1.1+70*1.3+80*1.2;ave=s/3 然后保存即可2 编写函数M 文件SQRT.M;函数()f x = x=567.889与0.0368处的近似值(保留有效数四位)在指令窗口输入指令edit ,打开空白的M 文件编辑器;里面输入syms x1 x2 s1 s2 zhi1 zhi2x1=567.889;x2=0.368; s1=sqrt(x1);s2=sqrt(x2); zhi1=vpa(s1,4) zhi2=vpa(s2,4)然后保存并命名为SQRT.M 即可3用matlab 计算()f x =的值,其中a=2.3,b=4.89.>> syms a b>> a=2.3;b=4.89;>> sqrt(a^2+b^2)/abs(a-b)ans =2.08644用matlab 计算函数()f x =在x=3π处的值. >> syms x>> x=pi/3;>> sqrt(sin(x)+cos(x))/abs(1-x^2)ans =12.09625用matlab 计算函数()arctan f x x =在x=1.23处的值. >> syms x >> x=1.23;>> atan(x)+sqrt(log(x+1))ans =1.78376 用matlab 计算函数()()f x f x ==在x=-2.1处的值. >> syms x>> x=-2.1;>> 2-3^x*log(abs(x)) ans =1.92617 用蓝色.点连线.叉号绘制函数[0,2]上步长为0.1的图像.>> syms x y>> x=0:0.2:2;y=2*sqrt(x); >> plot(x,y,'b.-')8 用紫色.叉号.实连线绘制函数ln 10y x =+在[20,15]--上步长为0.2的图像. >> syms x y>> x=-20:0.2:-15;y=log(abs(x+10)); >> plot(x,y,'mx-')ln 10[20,y x =+--9 用红色.加号连线虚线绘制函数sin()22x y π=-在[-10,10]上步长为0.2的图像. >> syms x y;>> x=-10:0.2:10;y=sin(x/2-pi/2); >> plot(x,y,'r+--')10用紫红色.圆圈.点连线绘制函数sin(2)3y x π=+在[0,4]π上步长为0.2的图像.sin(2)sin()[0,4]322x y x y πππ=+=- >> syms x y>> x=0:0.2:4*pi;y=sin(2*x+pi/3); >> plot(x,y,'mo-.')11 在同一坐标中,用分别青色.叉号.实连线与红色.星色.虚连线绘制y=与y =.>> syms x y1 y2>> x=0:pi/50:2*pi;y1=cos(3*sqrt(x));y2=3*cos(sqrt(x)); >> plot(x,y1,'cx-',x,y2,'r*--')12 在同一坐标系中绘制函数234,,y x y x y x ===这三条曲线的图标,并要求用两种方法加各种标注.234,,y x y x y x === >> syms x y1 y2 y3;>> x=-2:0.1:2;y1=x.^2;y2=x.^3;y3=x.^4;plot(x,y1,x,y2,x,y3);13 作曲线2sin x t y t z t ?=?=??=?的3维图像>> syms x y t z >> t=0:1/50:2*pi; >> x=t.^2;y=sin(t);z=t;>> stem3(x,y,z)14 作环面(1cos )cos (1cos )sin sin x u v y u v z u =+??=+??=?在(0,2)(0,2)ππ?上的3维图像>> syms x y u v z>> u=0:pi/50:2*pi;v=0:pi/50:2*pi;>>x=(1+cos(u)).*cos(v);y=(1+cos(u)).*sin(v);z=sin(u); >> plot3(x,y,z)15 求极限0lim x +→0lim x +→>> syms x y>> y=sin(2^0.5*x)/sqrt(1-cos(x)); >> limit(y,x,0,'right') ans = 216 求极限1201lim()3x x +→ >> syms y x>> y=(1/3)^(1/(2*x)); >> limit(y,x,0,'right') ans = 0 17求极限limx>> syms x y>> y=(x*cos(x))/sqrt(1+x^3); >> limit(y,x,+inf) ans = 0 18 求极限21lim ()1xx x x →+∞+- >> syms x y>> y=((x+1)/(x-1))^(2*x); >> limit(y,x,+inf) ans =exp(4)19 求极限01cos 2limsin x xx x→->> syms x y>> y=(1-cos(2*x))/(x*sin(x)); >> limit(y,x,0) ans = 220 求极限 0x →>> syms x y>> y=(sqrt(1+x)-sqrt(1-x))/x; >> limit(y,x,0) ans = 121 求极限2221lim 2x x x x x →+∞++-+>> syms x y>> y=(x^2+2*x+1)/(x^2-x+2); >> limit(y,x,+inf) ans = 1 22 求函数y=5(21)arctan x x -+的导数 >> syms x y>> y=(2*x-1)^5+atan(x); >> diff(y) ans =10*(2*x - 1)^4 + 1/(x^2 + 1) 23 求函数y=2tan 1x xy x=+的导数 >> syms y x>> y=(x*tan(x))/(1+x^2); >> diff(y) ans =tan(x)/(x^2 + 1) + (x*(tan(x)^2 + 1))/(x^2 + 1) - (2*x^2*tan(x))/(x^2 + 1)^224 求函数3tan x y e x -=的导数>> syms y x>> y=exp^(-3*x)*tan(x) >> y=exp(-3*x)*tan(x) y =exp(-3*x)*tan(x)>> diff(y) ans =exp(-3*x)*(tan(x)^2 + 1) - 3*exp(-3*x)*tan(x) 25 求函数y=2 2ln sin2xx π+在x=1的导数>> syms x y>> y=(1-x)/(1+x); >> diff(y,x,2) ans =2/(x + 1)^2 - (2*(x - 1))/(x + 1)^3>> syms x y>> y=2*log(x)+sin(pi*x/2)^2; >> dxdy=diff(y)dxdy =2/x + pi*cos((pi*x)/2)*sin((pi*x)/2) zhi=subs(dxdy,1)zhi =226 求函数y=01cos 2lim sin x x x x →-11xx-+的二阶导数>> syms x y>> y=(1-x)/(1+x); >> diff(y,x,2) ans =2/(x + 1)^2 - (2*(x - 1))/(x + 1)^327 求函数的导数;>> syms x y>> y=((x-1)^3*(3+2*x)^2/(1+x)^4)^0.2; >> diff(y) ans =(((8*x + 12)*(x - 1)^3)/(x + 1)^4 + (3*(2*x + 3)^2*(x - 1)^2)/(x + 1)^4 - (4*(2*x + 3)^2*(x - 1)^3)/(x + 1)^5)/(5*(((2*x + 3)^2*(x - 1)^3)/(x + 1)^4)^(4/5))28在区间(,-∞+∞)内求函数43()341f x x x =-+的最值. >> f='-3*x^4+4*x^3-1'; >> [x,y]=fminbnd(f,-inf,inf) x =NaN y =NaN>> f='3*x^4-4*x^3+1';>> [x,y]=fminbnd(f,-inf,inf) x =NaN y =NaN29在区间(-1,5)内求函数发()(f x x =-.>> f='(x-1)*x^0.6';>> [x,y]=fminbnd(f,-1,5) x =0.3750 y =-0.3470 >>>> f='-(x-1)*x^0.6';>> [x,y]=fminbnd(f,-1,5) x =4.9999 y =-10.505930 求不定积分(ln 32sin )x x dx -?(ln 32sin )x x dx -? >> syms x y>> y=log(3*x)-2*sin(x); >> int(y) ans =2*cos(x) - x + x*log(3) + x*log(x)31求不定积分2sin x e xdx ?>> syms x y>> y=exp(x)*sin(x)^2; >> int(y) ans =-(exp(x)*(cos(2*x) + 2*sin(2*x) - 5))/1032. 求不定积分>> syms x y>> y=x*atan(x)/(1+x)^0.5; >> int(y)Warning: Explicit integral could not be found. ans = int((x*atan(x))/(x + 1)^(1/2), x)33.计算不定积分2(2cos )x x x edx --?>> syms x y>> y=1/exp(x^2)*(2*x-cos(x)); >> int(y) Warning: Explicit integral could not be found. ans = int(exp(-x^2)*(2*x - cos(x)), x) 34.计算定积分1(32)xex dx -+?>> syms x y>> y=exp(-x)*(3*x+2); >> int(y,0,1) ans =5 - 8*exp(-1)1(32)x e x dx -+?35.计算定积分0limx x→120(1)cos x arc xdx +?>> syms y x>> y=(x^2+1)*acos(x); >> int(y,0,1) ans =11/936.计算定积分1cos ln(1)x x dx+?>> syms x y>> y=(cos(x)*log(x+1)); >> int(y,0,1)Warning: Explicit integral could not be found. ans = int(log(x + 1)*cos(x), x == 0..1) 37计算广义积分2122x x dx +∞++-∞?;>> syms y x>> y=(1/(x^2+2*x+2)); >> int(y,-inf,inf) ans = pi 38.计算广义积分20xdx x e+∞-?;>> syms x y>> y=x^2*exp(-x); >> int(y,0,+inf) ans = 2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数学建模习题答案数学建模部分课后习题解答中国地质大学能源学院华文静1.在稳定的椅子问题中,如设椅子的四脚连线呈长方形,结论如何?解:模型假设(1)椅子四条腿一样长,椅脚与地面接触处视为一点,四脚的连线呈长方形(2)地面高度是连续变化的,沿任何方向都不会出现间断(没有像台阶那样的情况),即从数学角度来看,地面是连续曲面。
这个假设相当于给出了椅子能放稳的必要条件(3)椅子在任何位置至少有三只脚同时着地。
为了保证这一点,要求对于椅脚的间距和椅腿的长度而言,地面是相对平坦的。
因为在地面上椅脚间距和椅腿长度的尺寸大小相当的范围内,如果出现深沟或凸峰(即使是连续变化的),此时三只脚是无法同时着地的。
模型建立在上述假设下,解决问题的关键在于选择合适的变量,把椅子四只脚同时着地表示出来。
首先,引入合适的变量来表示椅子位置的挪动。
生活经验告诉我们,要把椅子通过挪动放稳,通常有拖动或转动椅子两种办法,也就是数学上所说的平移与旋转变换。
然而,平移椅子后问题的条件没有发生本质变化,所以用平移的办法是不能解决问题的。
于是可尝试将椅子就地旋转,并试图在旋转过程中找到一种椅子能放稳的情形。
注意到椅脚连线呈长方形,长方形是中心对称图形,绕它的对称中心旋转180度后,椅子仍在原地。
把长方形绕它的对称中心旋转,这可以表示椅子位置的改变。
于是,旋转角度θ这一变量就表示了椅子的位置。
为此,在平面上建立直角坐标系来解决问题。
设椅脚连线为长方形ABCD,以对角线AC 所在的直线为x 轴,对称中心O 为原点,建立平面直角坐标系。
椅子绕O 点沿逆时针方向旋转角度θ后,长方形ABCD 转至A1B1C1D1的位置,这样就可以用旋转角)0(πθθ≤≤表示出椅子绕点O 旋转θ后的位在地面上所处的位置不变,由此可知,f (π)=g (0),g (π)=f (0).而由f (0)>0,g (0)=0,得g (π)>0,f (π)=0。
令h (θ)=f(θ)-g (θ),由f(θ)和g(θ)的连续性知h(θ)也是连续函数。
又0)()()(,0)0()0()0(<-=>-=πππg f h g f h ,根据连续函数介值定理,必存在),,0(0πθ∈使得)()(即,0)(000θθθg f h ==; 又因为0)()(所以,0)()(0000===•θθθθg f g f 。
于是,椅子的四只脚同时着地,放稳了。
模型讨论 用函数的观点来解决问题,引入合适的函数是关键.本模型的巧妙之处就在于用变量θ表示椅子的位置,用θ的两个函数表示椅子四只脚与地面的竖直距离.运用这个模型,不但可以确信椅子能在不平的地面上放稳,而且可以指导我们如何通过旋转将地面上放不稳的椅子放稳.2. 人、狗、鸡、米均要过河,船需要人划,另外至多还能载一物,而当人不在时,狗要吃鸡,鸡要吃米。
问人、狗、鸡、米怎样过河? 模型假设人带着猫、鸡、米过河,从左岸到右岸,船除了需要人划之外,只能载猫、鸡、米三者之一,人不在场时猫要吃鸡,鸡要吃米。
试设计一个安全过河方案,使渡河次数尽量地少。
符号说明1X :代表人的状态,人在该左岸或船上取值为1,否则为0; 2X :代表猫的状态,猫在该左岸或船上取值为1,否则为0; 3X :代表鸡的状态,鸡在该左岸或船上取值为1,否则为0; 4X :代表米的状态,米在该左岸或船上取值为1,否则为0:; ),,,(4321X X X X S k =:状态向量,代表时刻K 左岸的状态; ),,,(4321X X X X D k =:决策向量,代表时刻K 船上的状态;模型建立限制条件:⎩⎨⎧≠+≠+⇒=22043321X X X X X初始状态:)0,0,0,0(),1,1,1,1(00==D S模型求解根据乘法原理,四维向量),,,(4321X X X X 共有1624=种情况根据限制条件可以排除)1,1,0,0)(1,0,1,0)(1,1,1,0(三种情况,其余13种情况可以归入两个集合进行分配,易知可行决策集仅有五个元素{})0,0,,0,0(),0,0,0,1(),1,0,0,1(),0,1,0,1(),0,1,1,1(=D ,状态集有8个元素,将其进行分配,共有两种运送方案:方案一:人先带鸡过河,然和人再回左岸,把米带过右岸,人再把鸡运回左岸,人再把猫带过右岸,最后人回来把鸡带去右岸(状态见表1); 方案二:人先带鸡过河,然后人再回左岸,把猫带过右岸,人再把鸡运回左岸,人再把米带过右岸,最后人回来把鸡带去右岸(状态见表2); 目标:确定有效状态集合,使得在有限步内左岸状态由)0,0,0,0()1,1,1,1(→表一: 时刻 左岸状态K S 船上KD K=0K=1 K=2 K=3 K=4 K=5 (1,1,1,1) (0,1,1,1) (1,1,0,1) (0,1,0,(0,0,0,0) (1,0,1,0)(1,0,0,0)(1,0,0,1)(1,0,1,0)(1,1,0,0)K=6 K=70)(1,1,1,0)(0,0,1,0)(1,0,1,0)(0,0,0,0)(1,0,0,0)(1,0,1,0)表二:时刻左岸状态KS船上K DK=0 K=1 K=2 K=3 K=4 K=5 K=6 K=7 (1,1,1,1)(0,1,0,1)(1,1,0,1)(0,0,0,1)(1,0,1,1)(0,0,1,(0,0,0,0)(1,0,1,0)(1,0,0,0)(1,1,0,0)(1,0,1,0)(1,0,0,1)(1,0,0,0)(1,0,1,0)0)(1,0,1,0)(0,0,0,0)3. 学校共1000名学生,235人住在A宿舍,333人住在B宿舍,432人住在C宿舍。
学生们要组织一个10人的委员会,试用下列办法分配各宿舍的委员数:(1)按比例分配取整数的名额后,剩下的名额按惯例分给小数部分较大者.(2)2.1节中的Q值方法.(3)d’Hondt方法:将各宿舍的人数用正整数,2,1 n ,3相除,其商数如下表:1 2 34 5 …A B C 235 117.5 78.3 58.75 …333 166.5 111 83.25 …432 216 144108 86.4将所得商数从大到小取前10个(10为席位数),在数字下标以横线,表中A ,B ,C 行有横线的数分别为2,3,5,这就是3个宿舍分配席位.你能解释这种方法的道理吗。
如果委员会从10人增至15人,用以上3种方法再分配名额.将3种方法两次分配的结果列表比较.(4)你能提出其他的方法吗.用你的方法分配上面的名额.解:先考虑N=10的分配方案,∑=====313211000,432,333,235i i p p p p方法一(按比例分配)4,33.3,35.2332211======N p q N p q N p q分配结果为:4,3,3321===n n n方法二(Q 值方法)9个席位的分配结果(可用按比例分配)为: 4,3,3321===n n n 第10个席位:计算Q 值为92407543333,920417322352221=⨯==⨯=Q Q 933125443223=⨯=QQ3最大,第10个席位应给 C.分配结果为5,3,2321===n n n方法三(d ’Hondt 方法)原理:记pi 和ni 为各宿舍的人数和席位(i=1,2,3代表A 、B 、C 宿舍),ii n p是每席位代表的人数,取in =3,2,1…,从而得到的iin p 中选较大者,可使对所有的i ,ii n p 尽量接近。
所以此方法的分配结果为:5,3,2321===n n n再考虑15=N 的分配方案,类似地可得名额分配结果。
现将3中方法两次分配额结果列表如下:宿舍 (1) (2) (3)(1) (2)(3) A B C3 2 23 3 345 5 4 435 556 67总计10 10 15 1510 154. 一垂钓俱乐部鼓励垂钓者将钓上的鱼放生,打算按照放生的鱼的重量给予奖励,俱乐部只准备了一把软尺用与测量,请你设计按照测量的长度估计鱼的重量的方法。
假设鱼池中只有一种鲈鱼,并且得到了8条鱼的如下数据(胸围指鱼身的最大周长):身长(cm)36.8 31.8 43.8 36.8 32.1 45.1 35.9 32.1重量(g) 756 482 1162 737 482 1389 652 454胸围(cm)24.8 21.3 27.9 24.8 21.6 31.8 22.9 21.6先用机理分析,再用数据确定参数。
模型分析本题为了知道鱼的重量,用估计法来通过估计鱼的长度而确定鱼的重量,这种方法只能针对同一种体形相似鱼,但是一般而言世界上没有两种完全相同的东西,所以对于同一种类的鱼也有可能肥瘦不一。
所以在此,我们应该先不妨假设同一种鱼它的整体形状是相似的,密度也大体上是相同的。
模型假设(1) 设鱼的重量为ω; (2) 鱼的身长记为l ; 模型的构成与求解因为我们前面假设了鱼的整体形状是相似的,密度也相同,所以鱼的重量ω与身长l 的立方成正比,为这两者之间的比例系数。
即131,k k νω=为比例系数。
不过常钓得较肥的垂钓者不一定认可上面的模型,因为它对肥鱼和瘦鱼同等看待,如果只假定鱼的截面是相似的,则横截面积与鱼身最大周长的平方成正比,于是222,k l d k =ω为比例系数。
利用题中给的数据,估计模型中的系数可得:,0322.0,0146.021==k k 将实际数据与模型结果比较如下表: 实际重量(g ) 765 482 1162 737 4821389 652 454模型31νωk =727 469 1226 727 4831339 675 483模型l d k 22=ω730 465 1100 730 4831471 607 483通过机理分析,基本上满意5.生物学家认为,对于休息状态的热血动物消耗的能量主要用于维持体温,能量与从心脏到全身的血流量成正比,而体温主要通过身体表面散失,建立一个动物体重与心率之间关系的模型,并用下面的数据加以检验。
动物体重(g)心率(次/分)田鼠家属兔小狗大狗羊人马25 670 200 420 2000 205 5000 120 30000 85 50000 70 70000 72 450000 38解:动物消耗的能量P主要用于维持体温,而体内热量通过表面积S散失,记动物体重为ω,则PSPαω,3/2-∝∝正比于血流量Q,而qrQ=,其中q是动物每次心跳泵出的血流量,r为心率。
合理地假设q与ω成正比,于是rqω∝,综上可得3/13/1或,-=∝ωωk r r 。
由所给数据估计得310897.20⨯=k,将实际数据与模型结果比较如下表:动物 实际心率(次/分) 模型结果(次/分)田鼠 家属 兔 小狗 大狗 羊 人 马670 715420 375205 166120 12285 6770 5772 5138 276. 速度为v 的风吹在迎风面积s 为的风车上,空气密度是ρ。