halcon threshold函数
halcon区域仿射变换
Halcon区域仿射变换1. 介绍Halcon是一种强大的机器视觉库,用于开发各种视觉应用程序。
其中之一的功能是区域仿射变换,它可以将一个图像区域按照指定的仿射变换矩阵进行变形。
本文将介绍Halcon中区域仿射变换的基本原理、使用方法和示例。
2. 原理区域仿射变换是指对一个二维图像区域进行平移、旋转、缩放和剪切等线性变换操作。
这些操作可以通过一个3x3的仿射变换矩阵来表示,该矩阵可以通过多个参数进行定义。
常见的仿射变换包括平移、旋转、缩放和剪切。
平移通过改变图像区域的原点坐标来实现;旋转通过改变图像区域中每个点的坐标来实现;缩放通过改变图像区域中每个点的坐标和大小来实现;剪切通过改变图像区域中每个点的坐标和倾斜角度来实现。
3. 使用方法在Halcon中,要进行区域仿射变换,需要先创建一个表示待处理图像区域的对象,然后定义一个仿射变换矩阵,并将其应用于图像区域对象上。
下面是一个示例代码,演示了如何使用Halcon进行区域仿射变换:read_image(Image, 'image.jpg')threshold(Image, Region, 128, 255)affine_trans_region(Region, TransformedRegion, HomMat2D)在这个示例中,首先使用read_image函数读取一张图像,并使用threshold函数对图像进行二值化处理,得到一个表示图像区域的对象Region。
然后通过定义一个仿射变换矩阵HomMat2D,并使用affine_trans_region函数将变换应用于图像区域对象上,得到变形后的图像区域对象TransformedRegion。
4. 示例下面是一个具体的示例,展示了如何使用Halcon进行区域仿射变换。
首先,我们读取一张待处理的图像,并对其进行二值化处理:read_image(Image, 'image.jpg')threshold(Image, Region, 128, 255)接下来,我们定义一个仿射变换矩阵,并设置相关参数:HomMat2D := hom_mat2d_identity()HomMat2D := hom_mat2d_translate(HomMat2D, 100, -50) // 平移HomMat2D := hom_mat2d_rotate(HomMat2D, 30) // 旋转HomMat2D := hom_mat2d_scale(HomMat2D, 0.8, 1.2) // 缩放HomMat2D := hom_mat2d_shear(HomMat2D, 0.1, 0.2) // 剪切然后,我们将定义好的仿射变换矩阵应用于图像区域对象上:affine_trans_region(Region, TransformedRegion, HomMat2D)最后,我们可以显示原始图像和变形后的图像进行对比:dev_display(Image)dev_display(TransformedRegion)通过运行上述代码,我们可以看到原始图像和变形后的图像同时显示在屏幕上。
Halcon常见算子的用法

Halcon常见算子的用法1.threshold ( Image :Region : MinGray, MaxGray : )选取从输入图像灰度值的g满足下列条件:MinGray < = g < = MaxGray 的像素为目标。
2.bin_threshold( Image : Region : : )自动确定阈值 Region:黑暗区域为目标图像。
举例:threshold(Image,CircleRegion,200,255)bin_threshold(Image, Region)处理结果如下图:对于threshold 可用于提取任意区域,本例中白色为目标,可提取圆形。
bin_threshold只能将工件区域作为目标。
3.dyn_threshold ( OrigImage, ThresholdImage : RegionDynThresh : Offset, LightDark : )自适应阈值分割:主要用于光照不均匀图像的局部阈值分割,比较两个像素的图像像素RegionDynThresh(Out) 分割区域Offset: 减少噪音引起的问题LightDark 提取光明、黑暗或类似的地方常常与mean_image 函数一起用来处理背景光照分布不均匀的问题。
举例:mean_image (ParticlesRed, Mean, 31, 31) #均值滤波dyn_threshold (ParticlesRed, Mean, SmallRaw, 3, 'light')4.reduce_domain( Image, ROI : ImageReduced : : )主要用来获得选取Image图像中的ROI范围的区域。
用于提取原始图像中感兴趣的区域。
举例:read_image (Image, 'mreut')gen_circle (ROI, 256, 256, 200) * 创建一个圆reduce_domain (Image, ROI, ImageReduced) *和图像结合起来--- 选取图像中的圆范围的图像形成了ROIedges_sub_pix (ImageReduced, Edges, 'lanser2', 0.5, 20, 40) dev_display (Image)dev_display (ROI)dev_display (Edges)处理结果如下图:说明后续处理的区域都在圆的范围内。
Halcon学习(五)获取特征点

Halcon学习(五)获取特征点这个例程是要检查图中焊接点,并获取焊接点的直径。
处理过程:首先,分离比较明亮的区域,然后将找出来的结果,转换成最小的平行矩形,即获得了图像处理的ROI。
这里采用了阈值分割:将图像中的灰度值处于某一指定灰度值范围内全部点选到输出区域中。
threshold (Bond, Bright, 100, 255) 然后,在ROI区域内选择比较暗的区域,移除不适合的区域(利用形状,面积等参数),把物体抽出变成一个独立的物,找出圆形物体,并且排列物体即可。
程序如下:dev_close_window ()dev_open_window(0, 0, -1, -1, 'black', WindowID)read_image(Die, 'E:/halcon图像/die_03.png')dev_display(Die)threshold(Die, Brightregion,100,255)shape_trans(Brightregion, ROI, 'rectangle2')reduce_domain(Die, ROI, DieROI)threshold(DieROI, RawSegmentation,0,50)fill_up_shape(RawSegmentation, Wires, 'area', 1, 100) opening_circle(Wires, BallRegion, 15.5)connection(BallRegion, Balls)select_shape(Balls, FinalBalls, 'circularity', 'and', 0.85, 1.0) count_obj(FinalBalls,NumBalls)smallest_circle(FinalBalls, Row, Column, Radius) meanRadius := sum(Radius)/|Radius|area_center(FinalBalls, Area, RowCenter, Colcenter) minArea := min(Area)disp_circle(WindowID, Row, Column, Radius)所用到的算子如下:threshold(Image : Region : MinGray, MaxGray : )阈值处理算子,MinGray <= g <= MaxGray,halcon软件将g 所在的范围变成红色。
halcon函数

threshold 按设置的阙值提取图像区域。
connection 合并所有选定像素触摸相互连通区。
Select_shape 选择区域面积(属性:'面积')在指定区间内。
Smallest_rectangle1计算每个区域的坐标(连续/栏)的包围矩形。
dilation_circle ( Region ,RegionDilation , Radius ) 膨胀Radius为半径complement ( Region , RegionComplement )反填充Region区域get_mbutton ( WindowHandle, &Row, &Column, &Button ) 等待至用户鼠标有输入,Row,和Column返回坐标,左键输入:Button=1;中键:Button=2;右键:Button=4set_tposittion(windowhandle,Row,Column)设置文本输出坐标mean_image ( Image : ImageMean : MaskWidth, MaskHeight : )取平均值平滑图像MaskWidt h &MaskHeight ∈ {3, 5, 7, 9, 11, 15, 23, 31, 43, 61, 101} select_region_point (ConnectRegion, OneObject, Row, Column)在连同区ConnectRegion中用坐标选中区域gauss_image ( Image : ImageGauss : Size : )高斯模糊图像,size:3,5,7,9,11 sub_image ( ImageMinuend, ImageSubtrahend : ImageSub : Mult, Add : ) ImageSub=(ImageMinuend-ImageSubtrahend)*Mult+Add,增强两幅图像的差异elliptic_axis ( Regions : : : Ra, Rb, Phi ),计算Region区域中的椭圆参数decompose3 ( MultiChannelImage : Image1, Image2, Image3 : : )三通道图像转换为三个图像trans_from_rgb ( ImageRed, ImageGreen, ImageBlue :ImageResult1,ImageResult2, ImageResult3 : ColorSpace : )从一个rgb图像转换为一个任意格式图像difference ( Region, Sub : RegionDifference )计算两个区域的不同,并返回dev_update_pc ( DisplayMode) 设置程序是否总在前面,对置顶有作用(不支持C++代码)dev_update_window (DisplayMode) 默认状态下所有的对象(图像,区域,或XLD)都在活动图形窗口显示。
Halcon阈值化算子dual_threshold和var_threshold的理解

Halcon阈值化算⼦dual_threshold和var_threshold的理解Halcon中阈值⼆值化的算⼦众多,通常⽤得最多的有threshold、binary_threshold、dyn_threshold等。
threshold是最简单的阈值分割算⼦,理解最为简单;binary_threshold是⾃动阈值算⼦,它可以⾃动选出暗(dark)的区域,或者⾃动选出亮(light)的区域,理解起来也没有难度。
动态阈值算⼦dyn_threshold理解起来稍微复杂⼀点,使⽤dyn_threshold算⼦的步骤基本是这样的:①将原图进⾏滤波平滑处理。
②⽤原图和平滑后的图逐个像素做⽐较,它可以根据参数分割出原图⽐平滑后的图灰度⾼(或者低)若⼲个灰度值的区域。
举例如下:处理程序是这样的:1 read_image (Image, 'C:/Users/happy xia/Desktop/dynPic.png')2mean_image (Image, ImageMean, 9, 9)3 dyn_threshold (Image, ImageMean, RegionDynThresh, 10, 'dark')程序分析:本例中,将图⽚模糊后,点阵字的⿊⾊扩散了,随之就是字的⿊⾊不如原图那么⿊了,那么通过给定的限值“10”和“dark”,就可以将原图⽐模糊后的图暗10个灰阶以上的区域(即⿊⾊⽂字部分)选出来了。
以上所说的三个算⼦并不是本⽂的重点,但却是理解下⾯的两个阈值分割算⼦的准备知识。
1、dual_threshold先看程序和效果图再分析。
1 read_image (Image, 'C:/Users/happy xia/Desktop/2.png')2 dual_threshold (Image, RegionCrossings, 174, 200, 180)dual_threshold(Image : RegionCrossings : MinSize, MinGray, Threshold : )该算⼦签名中:Threshold 表⽰⽤于分割的阈值数值,MinSize表⽰分割出来的区域的最⼩⾯积(即数像素的数⽬个数),MinGray表⽰分割出来的区域对应的原图中图像像素的最⾼灰度不能低于MinGray设定值。
3Halcon的threshold()函数,用于阈值分割

3Halcon的threshold()函数,用于阈值分割函数原型:threshold(Image: Region: MinGray,MaxGray: )功能:使用全局阈值分割图像,获取像素值介于MinGray和MaxGray 的区域。
参数列表:第1个参数Image是输入变量,表示输入图像第2个参数Region是输出变量,表示被分割后的图像第3个参数MinGray是输入变量,阈值分割像素的最小值,默认值为128.0,建议可用值:0.0, 10.0, 30.0, 64.0, 128.0, 200.0, 220.0, 255.0第4个参数MaxGray是输入变量,阈值分割像素的最大值,默认值为255.0,建议可用值:0.0, 10.0, 30.0, 64.0, 128.0, 200.0, 220.0, 255.0注:最后两个参数的限制条件:MaxGray>=MinGray。
可能的前置应用函数:histo_to_thresh()(根据直方图决定灰度值门限)、min_max_gray()(计算区域内最大最小灰度值)、sobel_amp()(Sobel算子检测边缘)、binomial_filter()(binomial 滤波器平滑图像)、gauss_image()(离散高斯函数平滑图像)、reduce_domain()(缩小图像区域)、fill_interlace()(插补两个半个视频图像)可能的后置应用函数:connection()(连接区域)、dilation1()(扩大区域)、erosion1()(腐蚀区域,变小)、opening()(打开区域)、closing()(关闭区域)、rank_region()(归类区域)、shape_trans()(改变区域形状)、skeleton()(计算区域框架)可被替换函数:class_2dim_sup()(采用二维空间像素分类分割图像)、hysteresis_threshold()(磁滞门限操作)、dyn_threshold()(局域阀值分割图像)、bin_threshold()(自动产生的阀值分割图像)、char_threshold()(为提取的字符产生一个分割阀值)、auto_threshold()(直方图决定阀值分割图像)、dual_threshold()(对标记的图像做门限操作)。
halcon四个顶点坐标排序

halcon四个顶点坐标排序摘要:1.引言2.Halcon四个顶点坐标排序的背景和意义3.Halcon四个顶点坐标排序的方法和步骤4.实例演示5.总结正文:Halcon是一种常用的机器视觉开发软件,它提供了丰富的图像处理和分析功能。
在实际应用中,我们常常需要对图像中的四个顶点坐标进行排序,以满足特定算法或功能的需求。
本篇文章将详细介绍Halcon四个顶点坐标排序的方法和步骤。
首先,我们需要了解Halcon四个顶点坐标排序的背景和意义。
在机器视觉领域,对四个顶点坐标进行排序可以帮助我们更好地处理和分析图像,例如在目标检测、识别和跟踪等任务中,需要根据四个顶点坐标对目标进行定位和描述。
此外,排序后的四个顶点坐标可以简化图像处理算法,提高算法的执行效率。
接下来,我们将介绍Halcon四个顶点坐标排序的方法和步骤。
整个过程可以分为以下几个部分:1.读取图像并进行预处理:使用Halcon的ReadImage函数读取图像,然后通过一系列图像处理操作对图像进行预处理,例如平滑、阈值处理等,以便更好地提取四个顶点坐标。
2.提取四个顶点坐标:使用Halcon的FindCorners函数提取图像中的四个顶点坐标。
这个函数可以根据用户设定的参数,如极值、阈值等,找到图像中满足条件的角点。
3.排序四个顶点坐标:使用Halcon的Sort function对提取到的四个顶点坐标进行排序。
排序可以根据用户设定的规则进行,例如按照横坐标或纵坐标进行升序或降序排列。
4.实例演示:为了更好地理解上述方法,我们提供一个实例演示。
假设我们有一张如下所示的图像:```1 1 11 1 11 1 11 1 1```假设我们使用以下代码对图像进行处理:```halconread_image (Image, "path/to/image")threshold (Image, Region, 128, 255)find_corners (Region, Corners)sort_function (Corners, "y", "asc")```执行以上代码后,我们可以得到按照纵坐标升序排列的四个顶点坐标。
halcon函数手册

halcon函数手册threshold(Image : Region : MinGray, MaxGray : )Descriptionthreshold selects the pixels from the input image whose gray values g fulfill the following condition:All points of an image fulfilling the condition are returned as one region. If more than one gray valueinterval is passed (tuples for MinGray and MaxGray), one separate region is returned for each interval. For vector field images, the threshold is not applied to gray values but to the lengths of the vectors.找出图像中灰度值大于MinGray,小于MaxGray的像素点connection(Region : ConnectedRegions : : )Descriptionconnection determines the connected components of the input regions given in Region. The neighborhood used for this can be setvia set_system('neighborhood',<4/8>). The default is 8-neighborhood, which is useful for determining the connected components of the foreground. The maximum number of connected components that is returnedby connection can be set via set_system('max_connection',). The default value of 0 causes all connected components to be returned. The inverse operator of connection is union1.select_shape(Regions : SelectedRegions : Features, Operat ion, Min, Max : )DescriptionThe operator select_shape chooses regions according to shape. For each input region from Regions the indicated features(Features) are calculated. If each (Operation = 'and') or at least one (Operation = 'or') of the calculated features is within the default limits (Min,Max) the region is adapted into the output (duplicated).Condition:For an illustration of the different features, please refer to the documentationof the operator region_features.选择指定特征(满足指定条件)的区域,特征常见为面积。
halcon 函数 中文说明

halcon 函数中文说明
Halcon 是一种计算机视觉库,提供了丰富的函数来进行图像处理和分析。
以下是一些常见的 Halcon 函数及其中文说明:
1. read_image:读取图像文件。
2. write_image:将图像数据写入文件。
3. rgb_to_gray:将 RGB 图像转换为灰度图像。
4. threshold:进行图像二值化处理。
5. reduce_domain:将图像限制在指定的区域内。
6. crop_rectangle:裁剪图像的矩形区域。
7. find_shape_model:在图像中查找指定形状的模板。
8. affine_trans_image:对图像进行仿射变换。
9. gen_circle_contour_xld:生成圆形轮廓。
10. intersection_lines:计算两条直线的交点。
以上只是 Halcon 库中的一小部分函数,它还提供了许多其他的函数和工具,用于各种图像处理和计算机视觉任务。
halcon膨胀腐蚀算子
halcon膨胀腐蚀算子Halcon膨胀腐蚀算子Halcon是一个图像处理和分析软件库,拥有丰富的工具和算法,可以用于各种图像处理任务。
在Halcon中,膨胀和腐蚀是两个基本的形态学操作,用于图像分割、边缘检测、形状分析等任务中。
本文将详细介绍Halcon中的膨胀腐蚀算子及其应用。
1. 膨胀算子膨胀是一种用于增强和扩展物体的操作,可以将物体的边缘向外扩展。
在Halcon中,我们可以使用dilate()函数来对图像进行膨胀操作。
dilate()函数所需的参数包括:输入图像、结构元素和输出图像。
其中,结构元素可以是矩形、十字、圆形等形状,用于指定膨胀的方向和大小。
输出图像是一个与输入图像大小相同的二值图像,其中物体的边缘被扩大。
例如,我们可以使用以下代码对一个二值图像进行膨胀操作:* 读取图像 * read_image(Image, 'test.png')* 定义结构元素 * SparseStruct := [0,1,0, 1,1,1, 0,1,0]* 膨胀 * dilate(Image, DilatedImage,SparseStruct)在上面的代码中,我们首先使用read_image()函数读取了一张二值图像,然后定义了一个矩形的结构元素,最后使用dilate()函数对输入图像进行膨胀操作,并将结果保存到输出图像DilatedImage中。
2. 腐蚀算子腐蚀是一种用于缩小和去除物体边缘的操作,可以将物体的边缘向内收缩。
在Halcon中,我们可以使用erode()函数来对图像进行腐蚀操作。
erode()函数的参数与dilate()函数的参数类似,需要指定输入图像、结构元素和输出图像。
不同的是,结构元素需要与膨胀算子中的结构元素相对应,用于指定腐蚀的方向和大小。
输出图像是一个与输入图像大小相同的二值图像,其中物体的边缘被缩小。
例如,我们可以使用以下代码对一个二值图像进行腐蚀操作:* 读取图像 * read_image(Image, 'test.png')* 定义结构元素 * SparseStruct := [0,1,0, 1,1,1, 0,1,0]* 腐蚀 * erode(Image, ErodedImage,SparseStruct)在上面的代码中,我们首先使用read_image()函数读取了一张二值图像,然后定义了一个矩形的结构元素,最后使用erode()函数对输入图像进行腐蚀操作,并将结果保存到输出图像ErodedImage中。
halcon 聚类算法

Halcon 聚类算法1. 简介Halcon是一款广泛应用于机器视觉领域的软件库,提供了丰富的图像处理和分析功能。
其中,聚类算法是Halcon中重要的一部分,用于将数据集划分为不同的群组。
本文将介绍Halcon中常用的聚类算法及其应用。
2. K-Means 聚类算法K-Means是一种常见的聚类算法,它通过将数据集划分为K个簇来实现聚类。
该算法具有简单、高效的特点,并且在实际应用中广泛使用。
2.1 算法原理K-Means算法基于以下几个步骤:1.随机选择K个初始聚类中心。
2.将每个样本点分配到距离最近的聚类中心。
3.根据每个簇内样本点的均值更新聚类中心。
4.重复步骤2和3,直到收敛或达到最大迭代次数。
2.2 Halcon中使用K-Means算法在Halcon中,可以使用kmeans_clustering函数来执行K-Means聚类算法。
该函数需要指定输入数据集、簇数目以及其他参数。
以下是使用Halcon进行K-Means聚类的示例代码:read_image(Image, 'image.jpg')convert_image_type(Image, 'byte')reduce_domain(Image, ImageReduced)features := create_feature_set()add_features_object(features, ImageReduced, 7)kmeans_clustering(features, 4, KMeansHandle)get_clusters(KMeansHandle, Clusters)上述代码首先读取图像并将其转换为灰度图像,然后使用reduce_domain函数减少领域以提高聚类性能。
接下来,创建一个特征集并将图像添加到特征集中。
最后,使用kmeans_clustering函数执行聚类并获取聚类结果。
3. DBSCAN 聚类算法DBSCAN(Density-Based Spatial Clustering of Applications with Noise)是一种基于密度的聚类算法,它能够发现任意形状的簇,并且对噪声数据具有较好的鲁棒性。
部分halcon函数整理版

halcon函数应用1、read_image (Image, 'F:/image/001.bmp') 读入图像2、threshold (Image, region, 100, 200) 阈值分割,获取区域3、dev_close_window() 关闭当前图形窗口4、dev_open_window (0, 0, 640, 480, 'black', WindowHandle) 打开一个新的图像窗口5、decompose3 (Image, Red, Green, Blue) 三通道图像转换成三幅单通道图像5.5、compose3(Red, Green, Blue, Image) 三幅单通道图像组合为三通道图像6、connection (Region, ConnectedRegions) 将像素有相连的区域合并成一个元素element7、count_obj(ConnectedRegions, Number) 计算元素element的个数8、select_shape(Regions, SelectedRegions, Features, Operation, Min, Max)select_shape (ConnectedRegions,SelectedRegions,['area','anisometry'], 'and', [500,1.0], [50000,1.7]) 连通域形状的选择circularity:表示环状;充实度roundness:圆度9、dev_set_color('red') 设定输出的颜色10、dev_set_draw ('margin') 或者dev_set_draw ('fill') 确定区域填充模式11、get_image_size (Image, Width, Height) 得到图像的宽度和高度12、get_image_pointer1 (Image_slanted, Pointer, Type, Width, Height) 设定Pointer 指向Image_slanted的起点位置。
halcon threshold函数
halcon threshold函数【最新版】目录1.halcon threshold 函数概述2.halcon threshold 函数的基本语法3.halcon threshold 函数的应用实例4.halcon threshold 函数的优点与局限性正文【1.halcon threshold 函数概述】halcon threshold 函数是一种图像处理函数,它可以在 Halcon 软件中使用。
该函数的主要作用是对图像进行阈值处理,即根据设定的阈值,将图像中的像素点分为两类或多类,从而实现对图像的简化和特征提取。
【2.halcon threshold 函数的基本语法】halcon threshold 函数的基本语法如下:```THRESHOLD (Image, Threshold)```其中,Image 表示输入的图像,Threshold 表示设定的阈值。
通过调整阈值,可以改变图像中被划分的像素点的数量,从而达到不同的图像处理效果。
【3.halcon threshold 函数的应用实例】以下是一个 halcon threshold 函数的应用实例:假设我们有一张包含目标物体的图像,现在我们希望提取出目标物体的轮廓。
首先,我们可以使用 halcon threshold 函数对图像进行阈值处理,将图像中的目标物体和背景进行区分。
然后,我们可以对阈值处理后的图像进行轮廓提取,从而得到目标物体的轮廓。
具体的操作步骤如下:1.读取图像,并将其存储在变量 Image 中。
2.设定阈值,例如,我们可以将阈值设定为 128,这样图像中的像素点会被分为两类:大于 128 的像素点和小于等于 128 的像素点。
3.使用 halcon threshold 函数对图像进行阈值处理,并将结果存储在变量 ThresholdedImage 中。
4.对 ThresholdedImage 进行轮廓提取,并将结果存储在变量Contour 中。
halcon自动计算阈值方法
halcon自动计算阈值方法对自动计算阈值的分割算法Otsu进行分析,参考:https:///liyuanbhu/article/details/49387483等资料。
Otsu法也称为大津法或最大类间方差法,算法的基本原理是假设检测图像由前景和背景部分组成,通过统计学方法计算选取出阈值,使得这个阈值可以将前景和背景最大程度的区分开。
任意选取一个阈值t将图像分为两部分(前景和背景),前景像素点占图像的比例为W0、均值为U0,背景像素点占图像的比例为W1、均值为U1,图像整体的均值为U= W0* U0+ W1* U1,建立目标函数g(t)= W0*(U0-U)^2+ W1*( U1-U)^2,g(t)即为当分割阈值为t时的类间方差。
Otsu算法使得g(t)最大时所对应的t为最佳阈值(遍历不同阈值下[0,255])。
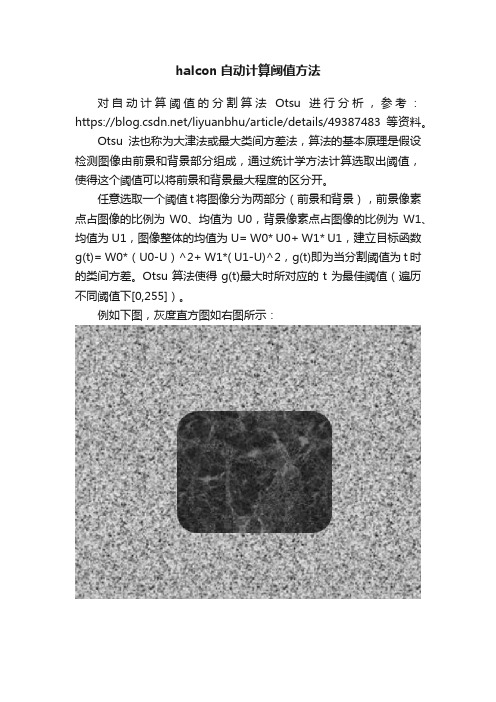
例如下图,灰度直方图如右图所示:我们遍历阈值为0-255时,g(t)的结果值并绘图,最大值在t=122位置处,则阈值为122时是最佳的分割阈值。
(1)halcon算子Image为输入图像,Region为提取的区域,UsedThreshold为阈值结果。
(2)matlab函数T=graythresh(Image);BW=im2bw(Image,T);Image为输入图像,BW为二值化后的图像。
T为阈值结果。
(3)opencv函数threshold函数,将第五个参数设置为CV_THRESH_OTSU。
Otsu算法适合于直方图为双峰直方图的图像。
若目标与背景图像还存在较大的干扰时,该算法会分割出错误的目标;或当目标与背景的大小比例悬殊时,g(t)函数可能出现双峰或多峰,分割效果不好。
例如下图,提取到了干扰区域,因为干扰区域在灰度直方图上出现了一个波峰,目标区域的波峰与背景被分在一起。
halcon中根据轮廓拟合直线
Halcon中根据轮廓拟合直线1. 介绍在图像处理领域,Halcon是一款功能强大的视觉软件库,提供了丰富的图像处理和分析工具。
其中,根据轮廓拟合直线是Halcon中常用的一个功能,可以用于检测和测量图像中的直线。
本文将介绍如何使用Halcon实现根据轮廓拟合直线的方法,并提供详细的代码示例和步骤说明。
读者可以按照本文提供的步骤进行操作,并根据自己的需求进行调整和优化。
2. 背景知识在开始编写代码之前,我们需要了解一些背景知识。
首先,了解什么是轮廓和直线。
在图像处理中,轮廓是指图像中连接相同灰度或颜色像素的边界线。
而直线则是由一组有序点构成的几何形状。
其次,我们需要了解Halcon中相关函数和操作。
在Halcon中,有几个函数可以用于根据轮廓拟合直线:•gen_contour_polygon_xld:将轮廓转换为多边形表示。
•fit_line_contour_xld:基于多边形表示的轮廓拟合直线。
•get_contour_xld:获取轮廓的点集。
了解这些函数和操作将有助于我们理解接下来的代码示例和步骤说明。
3. 代码示例下面是一个使用Halcon实现根据轮廓拟合直线的代码示例:read_image(Image, 'p ath/to/image.jpg')threshold(Image, BinaryImage, 128, 255)connection(BinaryImage, ConnectedRegions)select_shape(ConnectedRegions, SelectedRegions, 'a rea', 'a nd', [100, Inf])gen_contour_region(SelectedRegions, Contours, 'b order')gen_contour_polygon_xld(Contours, Polygon)fit_line_contour_xld(Polygon, Lines, 't ukey', 10, 0.5)上述代码首先读取一张图像,并对图像进行阈值处理,得到二值化图像。
Halcon阈值分割

Halcon阈值分割threshold(Image : Region : MinGray, MaxGray : )全局阈值分割,⽤户指定硬阈值binary_threshold(Image : Region : Method, LightDark : UsedThreshold)全局阈值分割,指定计算阈值fast_threshold(Image : Region : MinGray, MaxGray, MinSize : )使⽤全局阈值快速分割auto_threshold(Image : Regions : Sigma : )先通过⾼斯滤波对灰度直⽅图进⾏平滑,然后计算出极⼩值点,然后在极⼩值点处对图像进⾏分割,Regions数⽬为minima+1dyn_threshold(OrigImage, ThresholdImage : RegionDynThresh : Offset, LightDark : )使⽤局部阈值对图像进⾏分割,⼀般ThresholdImage由OrigImage进⾏平滑滤波得到,滤波模板尺⼨越⼤,则找到的区域越⼤,⼀般设置模板尺⼨为要提取⽬标的直径值的2倍。
local_threshold(Image : Region : Method, LightDark, GenParamName, GenParamValue : )局部阈值分割,基于局部的均值和标准差watersheds(Image : Basins, Watersheds : : )分⽔岭分割,适⽤于⽬标物体具有蜂窝状结构,⼀般阈值分割前先进⾏滤波regiongrowing(Image : Regions : Row, Column, Tolerance, MinSize : )区域⽣长阈值分割,适⽤于⽬标物具有⼀致的灰度值,⼀般阈值分割前先进⾏滤波。
Halcon一日一练:阈值分割的几个算子
Halcon⼀⽇⼀练:阈值分割的⼏个算⼦threshold(Image:Region:MinGray:MaxGray:)功能:得到灰度值在最⼩与最⼤这间的那些部分。
其返回仍然是⼀个区域。
MinGray<MaxGray.这个算⼦可以⽤灰度直⽅图求取到最佳的域值如在上⼀篇中,我们使⽤灰度直⽅图求取图像的最佳阈值,我们发现0-56时最佳,将值代⼊程序中即可。
read_image(Image, 'Clip')//读取图像threshold(Image, Region, 0, 56)//对图像进⾏分割connection(Region, ConnectedRegions)//连通区域select_obj(ConnectedRegions, ObjectSelected, 1)//选择区域中的索引区域1char_threshold(Image,HistoRegion:Characters:Sigma,Percent:Threshold)功能:阈值分割提取字符此⽅法的关键在于找到直⽅图中的最⼤值,在最⼤值的左侧找到关键阈值,其中阈值的计算⽅法如下:histogram[threshold]*100.0<histogram[maximum]*(100.0-Percent)也就是threshold所对应的灰度值频率不能⼤于最⼤值频率*(100。
0-percent)例程:dev_close_window ()read_image (Alpha1, 'alpha1')get_image_size (Alpha1, Width, Height)dev_open_window (0, 0, Width, Height, 'black', WindowHandle)set_display_font (WindowHandle, 16, 'mono', 'true', 'false')dev_display (Alpha1)dev_set_color ('white')dev_clear_window ()char_threshold (Alpha1, Alpha1, Characters, 6, 95, Threshold)dev_display (Characters)gray_histo (Alpha1, Alpha1, AbsoluteHisto, RelativeHisto)disp_continue_message (WindowHandle, 'black', 'true')stop ()dev_display (Alpha1)dev_set_color ('green')gen_region_histo (Histo1, RelativeHisto, 255, 255, 1)。
halcon中获取多边形顶点的方法

halcon中获取多边形顶点的方法
在Halcon中,您可以使用`gen_contour_polygon`函数获取多边形的顶点。
以下是一个示例代码,演示如何使用`gen_contour_polygon`函数获取多边形的顶点:
```python
import halcon as hl
# 读取图像
image = hl.read_image('image.jpg')
# 设置阈值并进行二值化
threshold = 128
binary_image = image > threshold
# 查找轮廓
contours = hl.gen_contours(binary_image, 'poly_approx')
# 获取第一个轮廓的顶点
x, y = hl.get_contour_xld(contours[0])
# 显示图像和顶点
hl.disp_image(image)
hl.disp_polygon(x, y)
# 关闭窗口
hl.close_window()
```
这段代码首先读取图像,然后使用阈值进行二值化。
接下来,通过`gen_contours`函数查找轮廓,并使用`get_contour_xld`函数获取第一个轮廓的顶点坐标。
最后,使用`disp_image`函数显示图像,并使用`disp_polygon`函数显示多边形的顶点。
请注意,以上示例代码仅适用于Python语言,如果您使用的是其他语言,可以参考Halcon的官方文档中关于`gen_contour_polygon`函数的说明。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Halcon Threshold函数详解
1. 函数定义
Halcon Threshold函数是图像处理库Halcon中的一个函数,用于对输入图像进行阈值分割。
其函数原型如下:
void threshold (HObject Image, out HObject Region, HTuple Threshold)
2. 函数用途
Halcon Threshold函数用于将输入图像根据阈值进行分割,将图像中大于或小于阈值的像素点分别标记为前景或背景,并将分割结果保存为Region对象。
该函数常用于图像分割、目标检测、图像二值化等应用场景。
3. 函数参数
•Image:输入图像,类型为HObject。
•Region:输出的分割结果,类型为HObject。
•Threshold:阈值,类型为HTuple,可以是单个值或者一个元组。
4. 函数工作方式
Halcon Threshold函数的工作方式如下:
1.将输入图像转换为灰度图像(如果输入图像为彩色图像)。
2.获取图像的尺寸和像素数。
3.遍历图像的每个像素点,将像素值与阈值进行比较。
4.如果像素值大于阈值,则将该像素标记为前景(即Region中的目标)。
5.如果像素值小于等于阈值,则将该像素标记为背景(即Region中的非目
标)。
6.将分割结果保存为Region对象。
5. 函数示例
下面是一个使用Halcon Threshold函数进行图像分割的示例代码:
// 导入Halcon库
using HalconDotNet;
// 定义图像路径
string imagePath = "image.jpg";
// 创建Halcon图像对象
HObject image;
// 读取图像
HOperatorSet.ReadImage(out image, imagePath);
// 创建Halcon Region对象
HObject region;
// 设置阈值
HTuple threshold = 128;
// 进行阈值分割
HOperatorSet.Threshold(image, out region, threshold);
// 显示分割结果
HOperatorSet.DispObj(region);
// 清除资源
HOperatorSet.ClearObj(image);
HOperatorSet.ClearObj(region);
上述示例代码中,首先导入Halcon库,并定义了一个图像路径。
然后,使用HalconDotNet命名空间中的HObject和HOperatorSet类创建了一个图像对象image。
接着,通过HOperatorSet.ReadImage函数读取图像。
然后,创建了一个HObject类
型的region对象,用于保存分割结果。
设置阈值为128,并调用
HOperatorSet.Threshold函数进行阈值分割。
最后,使用HOperatorSet.DispObj函数显示分割结果,并通过HOperatorSet.ClearObj函数清除资源。
6. 函数注意事项
在使用Halcon Threshold函数时,需要注意以下几点:
•输入图像必须为灰度图像或者彩色图像,不能为其他类型的图像。
•阈值可以是单个值,也可以是一个元组。
如果是元组,则表示多个阈值,函数会对每个阈值进行分割,并将结果合并。
•分割结果保存在Region对象中,可以使用其他Halcon函数对Region对象进行进一步处理,如形状分析、区域合并等。
7. 总结
通过本文对Halcon Threshold函数的详细解释,我们了解了该函数的定义、用途
和工作方式。
Threshold函数是Halcon图像处理库中的一个重要函数,用于对图
像进行阈值分割。
通过设置阈值,可以将图像中的目标与背景分离,并将分割结果
保存为Region对象。
在实际应用中,Threshold函数常用于图像分割、目标检测、图像二值化等场景。
通过灵活使用Threshold函数,可以实现各种图像处理任务。