欧洲车路协同技术发展与展望
欧盟铁路科技发展规划
- 104 -CHINA RAILWAY 2016/01路作为欧洲经济发展至关重要的运输骨干,在21世纪面临着前所未有的发展机遇。
科技发展水平是决定铁路兴衰的关键因素,为充分发挥其对铁路发展的支撑作用,欧盟把科技放在优先发展的战略地位,先后出台了一系列欧洲铁路科技发展战略和规划,对未来铁路技术发展重点领域、关键技术和主要任务进行部署,指明欧洲铁路未来技术发展的主要方向。
1 铁路科技规划制定基本情况欧盟提倡建立一体化、可持续的综合交通系统,以实现节能、环保和欧盟范围内互联互通的目标。
为促进各种交通运输方式的协调发展,20世纪90年代开始,欧盟陆续发布了多个交通运输发展白皮书,明确了整个交通系统的发展战略和方向。
2011年欧盟委员会制定的《通向欧盟一体化之路——建立更具竞争力、能源利用效率更高的交通系统》白皮书,强调要重点发展铁路运输,提出到2050年的铁路发展目标:将运距在300 km以上公路货运量的50%转移至铁路或水运,大多数中等距离客运均由铁路完成。
为响应白皮书提出的支持铁路发展的政策,欧洲议会、欧盟理事会和欧洲铁路研究咨询委员会等机构制定发布了一系列铁路发展战略,并对欧洲铁路未来发展进行了展望。
在此基础上,各机构又制定了相应的铁路科技发展规划,高度重视科技对铁路发展的支撑作用,力求通过科技创新实现铁路发展的目标。
(1)《地平线2020》。
2013年12月,欧洲议会和欧盟理事会制定了《2014—2020年研究和创新框架规划》,也称为《地平线2020》,这是欧盟至今规模最大的科技发展规划之一,计划7年内投入资金约800亿欧元。
铁路方面,欧盟理事会于2014年6月通过法令确定成立Shift2Rail联合工作组,正式出台Shift2Rail公私合作科技创新项目。
Shift2Rail是欧盟第一个以市场为导向的科研项目,几乎包含了铁路领域所有科技创新内容,把新的先进技术与创新产品相结合,以满足欧盟2020年发展战略和交通运输政策的要求。
车路协同技术在交通管理中的应用
车路协同技术在交通管理中的应用随着城市化进程的加速,人口密度和交通量的不断增加,交通管理问题成为当代城市面临的一大难题。
为了解决这一问题,各国普遍采用了车路协同技术,以提高交通的安全性、舒适性和便利性。
本文将重点探讨车路协同技术在交通管理中的应用,并对未来发展进行展望。
一、车路协同技术的定义及特点车路协同技术(Cooperative Vehicle-to-Infrastructure Systems)是指基于智能交通系统的车辆和道路设施之间的信息交互和互动,从而实现车辆与道路设施之间的协同共享,提高交通效率和安全性。
其特点主要有以下几点:1.信息共享。
车辆和道路设施之间能够实现信息共享,通过交流和转发信息来提供更加准确的路况信息和服务。
2.数据交换。
车辆和道路设施之间可以进行数据交换,包括车辆位置、速度、方向和车辆状态等信息。
3.决策互动。
车辆和道路设施之间可以进行决策互动,包括路况信息传输和车辆控制等方面。
二、车路协同技术在交通管理中的应用1.智能交通流量控制。
智能交通流量控制是指通过车路协同技术,对路面的交通流量进行监测和控制,从而实现优化路面的车辆流动性和安全性。
其中,主要包括交通信号控制、智能酷路导航、智慧停车等方面。
2.智能安全管理。
车路协同技术可以通过车辆与道路设施之间的信息交互和互动,实现对驾驶行为的监测和控制,从而提高行车安全性和道路通行能力。
例如,通过车辆信息共享和实时路况反馈,实现事故预警、交通状态监测和道路危险区域提示等功能。
3.智能环境治理。
车路协同技术可以通过对路面的监测和控制,实现智能环境治理。
例如,通过路面传感器和车辆信息共享,实现对空气质量、噪声污染和固体废物等方面的监测和管理。
三、车路协同技术的未来发展随着车路协同技术的不断发展和普及,其在交通管理中的应用将会越来越广泛和深入。
未来车路协同技术将会在以下几个方面取得更加显著的进展。
1.人工智能技术的应用。
随着人工智能技术的不断发展,其在车路协同技术中的应用将会更加广泛和深入。
V2X车路协同现状及发展趋势
根据交通运输部《2020年交通运输行业发展统计公报》 显示,全国二级及以上等级公路里程67.20万公里。假设主 要道路中期渗透率20%,约对应1612.8亿元市场规模,其 中RSU市场规模约268.8亿元市场规模。
➢ 高速公路V2X设备市场空间测算
2019年我国高速公路里程达到14.96万公里,假设主要道 路中期渗透率20%,约对应59.84亿元市场规模,其 中 RSU 市场规模约29.92亿元市场规模。
团体标准
C-ITS
完成送审
对应空口控制面和 用户面协议
制定中
对应空口控制面和 用户面协议
网络层
合作式智能运输系统 专用短程 通信 第3部分 网络层及应用层 规范
国家标准
TC/ITS和 CCSA
完成送审
分别对用基于IP和非 IP传输
合作式智能运输系统 专用短程 通信 第3部分 网络层及应用层 规范
国家标准
我国发展现状
信息通信领域
经过 3G 突破、4G 并跑的发展阶段,我国通信企业 已跻身世界领先地位,在国际 C-V2X、5G 等新一代 通信标准制定中发挥着越来越重要的作用。
汽车制造领域
基础环境
我国汽车产业在整体规模保持世界领先,自主品牌市 场份额逐步提高,核心技术也不断取得突破。
车联网 产业
基础设施建设
围内的投资和监管框架的融合,推动从2019年开始部署C-ITS业务计划 全国范围能实现智能道路交通系统,到2040年实现零交通事故
。
技术标准逐渐成熟,频谱规划明确
验证示范同步推进,产业化进程加速
➢ 技术路径 中国企业主推LTE-V2X技术;美国电信运营商、福特等国
际主流车企倾向于LTE-V2X;欧洲的奥迪、宝马、标致雪铁 龙等品牌已转向LTE-V2X;日本ITS行业标准和产业组织技术 中立, LTE-V2X作为备选技术。 ➢ 频率资源
国内外车路协同系统发展现状综述
国内外车路协同系统发展现状综述付姗姗,吕植勇,陈超,彭琪(武汉理工大学智能交通系统研究中心水路公路交通安全控制与装备教育部工程研究中心武汉430063)摘要:智能交通运输系统(ITS)是目前世界交通运输领域的前沿领域,在美国、日本及欧盟等众多先进国家中尤其受到重视。
车路协同系统(CVIS)作为ITS 的重要子系统,近年来也备受国内外科研人员关注,是世界交通发达国家的研究、发展与应用热点。
本文介绍了CVIS的概念以及内涵,介绍了美国IntelliDriveSM、欧洲eSafety、日本Smartway以及我国车路协同的发展情况,并对我国车路协同未来的发展进行了展望。
关键词:智能交通运输系统(ITS);车路协同系统(CVIS);IntelliDrive SM中图分类号:U492.25Overview of the Developments about Cooperative Vehicle-InfrastructureOverseas and InsideFu Shanshan,Lv Zhiyong,Chen Chao,Peng Qi(Intelligent Transport Systems Research Center, Engineering Research Center for Transportation Safety(Ministry of Education)Wuhan University of Technology, Wuhan, 430063, P. R. China)Abstract:Intelligent Transport Systems (ITS) is the frontier areas of tran-sportation and transportation all over the world, which in the United Stat es, Japan, the European Union and many other advanced countries attra ct more attention particularly.Cooperative Vehicle-Infrastructure System (C VIS) as a major ITS subsystems, has also been oncerned about domestic and foreign in recent years,which is the hot spot of overseas developed countries in research, development and application.This paper introduces the concept and connotation of CVIS, introduces the United States' IntelliDrive SM, the European Union' eSafety, Japanese Smartway and our collaborative development of the carriageway. And the same time, it makes the future development of the CVIS in our coubtry. Key words:Intelligent Transportation Systems; Cooperative Vehicle nfrast-ructure System; IntelliDrive SM引言智能交通运输系统(Intelligent Transportation Systems,ITS)是目前世界交通运输领域的前沿领域,已成为世界各国极力投注资源推动的重点之一,在美国、日本及欧盟等众多先进国家尤其受到重视,被认为是提高道路交通的可靠性、安全性和减少环境污染的有效手段之一。
国内外车路协同系统发展现状综述-陈超概要
国内外车路协同系统发展现状综述随着智能交通技术的迅猛发展,车路协同系统(V2X)逐渐受到各国政府和企业的关注。
车路协同系统是指通过车辆与路边设施之间进行无线通信,实现信息共享、交通安全和交通效率的智能交通系统。
本文将对国内外车路协同系统的发展现状进行综述。
国内车路协同系统发展现状中国车路协同系统的发展起步较晚,但近年来发展迅速,政府和企业积极推进相关技术和标准的研究和制定。
目前,国内的车路协同系统主要分为两类,即车对车(V2V)和车对设施(V2I)。
在V2V方面,国内主要采用车联网技术,通过车辆间的无线通信实现信息共享和交通安全,主要包括谷歌的自动驾驶技术、百度的Apollo、华为和宝马合作的5G技术等。
在V2I方面,主要应用智能交通设施,通过路侧设备向车辆发送相关信息,例如路况信息、拥堵情况、停车位等,提高交通效率和通行安全。
目前国内的智能交通设施主要包括车道指示器、红绿灯、监控相机、车载路侧单元等。
国外车路协同系统发展现状在国际上,车路协同系统得到了广泛的应用。
目前,欧洲是车路协同系统的主要应用地区之一。
欧洲的车路协同系统涵盖了车对车、车对设施、车对行人等模式,实现了多种交通方式的智能连接。
在V2V方面,欧洲主要采用车间通信技术(DSRC)和车联网等技术,实现车辆之间的信息共享和交通安全。
同时,欧盟也制定了与车路协同系统相关的标准和法规,例如欧盟车厢设计规范等。
在V2I方面,欧洲大量应用智能交通系统,例如智能交通灯、路侧储存器、电子高速公路等。
同时,欧洲各国采用的车路协同系统标准也大同小异,例如国际标准化组织的V2X标准等。
未来趋势车路协同系统的研究和应用将是智能交通领域的重点。
未来的趋势将是车路协同系统与5G、云计算等技术的深度融合。
同时,车路协同系统也要应对新的安全挑战,例如黑客攻击、虚假信息等。
目前,国内的车路协同系统仍然需要进一步完善标准和法规,以保证系统的稳定和安全。
同时,各企业也要加强协同,推进技术和应用的共同发展。
智能交通中的车路协同技术研究
智能交通中的车路协同技术研究一、引言车路协同技术是智能交通领域研究的热点之一,也是实现智能交通系统的关键技术之一。
在当今交通拥堵和交通事故频发的背景下,车路协同技术的研究已成为智能交通领域中重要的研究方向,其具有非常广阔的应用前景。
本文将着重探讨智能交通中的车路协同技术的研究现状、主要技术、发展趋势等方面。
二、车路协同技术的概述车路协同是指车辆和道路基础设施之间的信息交换和协同行动。
该技术通过将车辆与道路设施相互联系,实现交通管理与车辆舒适、安全和高效的协同,优化道路交通系统,提升道路交通安全和服务效率。
车路协同技术是现代交通领域的新技术,也是智能交通系统一个重要的组成部分。
车路协同技术主要包括以下几个方面:1.车辆间通信技术:通过车辆间通信技术,实现车辆与车辆之间的信息交换,提供车辆位置、速度、行驶轨迹等信息,相互协同实现行驶安全和路况信息的共享。
2.车辆-路侧通信技术:通过车辆-路侧通信技术,实现车辆与路侧设施之间的信息交换。
路侧设施可以向车辆提供路况信息、交通管理信息和服务信息等。
3.车辆-公共交通协同技术:通过车辆-公共交通协同技术,实现车辆和公共交通之间的协同,提供公共交通信息、实现公共交通优先等。
4.车辆-行人协同技术:通过车辆-行人协同技术,实现车辆和行人之间的协同,提供行人信息,实现交通安全、行人保护等。
三、车路协同技术的主要技术车路协同技术的实现依赖于以下几个核心技术:1.车辆-车辆通信技术车辆-车辆通信技术( V2V ),是车路协同技术中至关重要的一项技术。
它可以实现车辆间的实时信息交换,例如车辆位置、速度、行驶方向和状态等。
通过车辆与车辆之间的通信,可以大大提高行驶安全和行驶效率。
该技术的主要标准有 IEEE 802.11p 和LTE-V 。
2.车辆-路侧通信技术车辆-路侧通信技术(V2I)是车路协同技术中重要的一项技术。
它可以通过车辆与路侧基础设施之间的通信,提供路况信息、交通管理信息和公共服务信息等。
欧洲车路协同政策

欧洲车路协同政策
欧洲车路协同政策是指欧洲各国在交通领域的政策合作,旨在实现车辆与道路
基础设施之间的有效互联互通。
这一政策的目标是通过推动科技创新和合作,提高交通系统的安全性、效率和可持续性。
在欧洲车路协同政策的框架下,各国政府、道路管理机构、汽车制造商和其他
相关利益方密切合作,共同致力于推动交通系统的协同发展。
该政策的核心是通过信息和通信技术的应用,实现车辆与道路之间的信息交流和协同操作,从而提高交通系统的整体性能。
一个重要的组成部分是智能交通系统(ITS),它利用先进的通信和信息技术,将车辆、驾驶员和道路基础设施连接起来。
通过车辆与道路之间的实时数据交流,系统可以提供驾驶辅助功能、实时交通信息、智能导航和远程故障检测等服务,提高交通安全、减少交通拥堵、降低碳排放。
此外,欧洲车路协同政策还鼓励各国在道路基础设施方面进行改进和升级,例
如建设智能交通信号灯、引入电动车充电设备等。
这些措施可以进一步提高交通效率和环境友好性。
欧洲车路协同政策面临一些挑战,例如技术标准的统一、数据隐私和安全等问题。
然而,欧洲各国和相关利益方通过积极合作和协商,正在寻找解决方案,促进这一政策的有效实施。
总之,欧洲车路协同政策是欧洲各国合作推动交通系统创新和升级的重要举措。
通过车辆与道路之间的信息互通和协同操作,可以提高交通安全性、效率和可持续性。
虽然还存在一些挑战,但欧洲各国积极合作,努力克服这些问题,为实现一个更加智能、高效和环保的交通系统而努力。
2023年车路协同行业市场前景分析

2023年车路协同行业市场前景分析车路协同是指车辆和道路的互相协助,共同实现交通安全和交通效率的提升。
车路协同技术是未来汽车产业发展的重要方向之一,具有广阔的市场前景。
市场规模:近年来,随着城市化进程的加速和汽车保有量的增加,交通拥堵、安全问题等成为了城市发展的重要瓶颈,车路协同技术因其可以解决这些问题而备受关注。
据市场研究机构统计,全球车路协同市场在2018年达到了417亿美元,预计到2025年将达到918亿美元,复合年增长率为12.4%。
市场驱动:一是政策驱动。
面对交通拥堵和安全问题,政府部门重视车路协同技术的应用推广,并出台了一系列政策来扶持其发展。
例如,中国“新基建”政策中明确提出促进车路协同技术的发展,韩国也制定了“ITS未来战略”计划,以推进智能交通系统的建设。
二是市场推动。
智能化、网络化、数据化已经成为当前汽车产业发展的趋势。
车路协同技术的应用将对汽车的安全性、舒适性、性能等多方面产生影响,在提升用户体验的同时,也能促进汽车销售和服务的升级。
市场前景:车路协同技术将对未来交通领域的发展产生重要影响。
从市场上来看,车路协同技术分为交通管理、车联网、驾驶辅助三大领域,具体市场前景如下:交通管理:在城市交通拥堵问题越来越严重的背景下,车路协同技术的应用将优化城市交通管理。
例如,基于车道车速、车流量等数据的交通调度系统,可以通过设备控制和信息提示等方式引导车辆行驶,从而缓解交通拥堵问题。
据预测,到2025年,交通管理市场将占据车路协同市场的大部分份额。
车联网:车联网是车路协同技术的重要应用领域,其应用场景包括驾驶辅助、车辆控制和信息服务等多个方面。
在未来,车联网将成为汽车产业发展的主要方向之一,催生出一系列新的商业模式和产业链。
驾驶辅助:在车辆的技术提升和驾驶员的安全需求之间,驾驶辅助领域将成为车路协同技术的发展方向。
例如,采用车道保持辅助系统、前车碰撞预警系统等智能辅助功能,提升驾驶安全性并降低交通事故发生率。
车路协同技术 发展趋势

车路协同技术发展趋势随着智能交通系统的不断发展,车路协同技术作为其中的重要组成部分,正逐渐引起广泛关注。
车路协同技术是指通过车辆与道路基础设施之间的信息交互和协调,提高交通系统的安全性、效率和环境友好性。
本文将从多个角度探讨车路协同技术的发展趋势。
车路协同技术在智能交通系统中的应用将越来越广泛。
随着车辆和道路基础设施的智能化水平提高,车辆能够通过与交通信号灯、路况监测设备等道路设施的信息交互,获取实时的路况信息,从而智能调整行驶路径和速度,提高交通效率。
此外,通过车辆与道路基础设施之间的协同,还可以实现自动驾驶技术的更好应用,提高交通安全性。
车路协同技术将与其他新兴技术相结合,进一步提升交通系统的智能化水平。
例如,车路协同技术与5G通信技术的结合,可以实现车辆与道路设施之间的高速、低延迟的信息传输,从而更加精准地获取路况信息,提高交通系统的响应速度。
另外,车路协同技术还可以与人工智能、大数据等技术相结合,通过对海量数据的分析和处理,为交通管理者提供更准确、更全面的决策支持。
第三,车路协同技术将促进交通系统的智能化管理与优化。
通过车辆与道路基础设施之间的信息交互,交通管理者可以实时获取道路使用情况、交通拥堵情况等信息,从而及时调整交通流量,优化交通系统的整体运行效率。
此外,车路协同技术还可以实现对交通事故的预测和预防,提前采取措施避免交通事故的发生,提高交通系统的安全性。
第四,车路协同技术的发展还将带来交通出行方式的变革。
通过车辆与道路基础设施之间的信息交互,交通管理者可以更加精确地控制交通流量,减少交通拥堵,从而提高公共交通的吸引力。
另外,车路协同技术还可以实现车辆之间的协同行驶,减少交通事故的发生,提高交通出行的安全性。
这些变革将促使人们更加愿意选择公共交通和共享交通工具,减少私家车的使用,降低交通拥堵和尾气排放,改善城市交通环境。
车路协同技术作为智能交通系统的重要组成部分,其发展趋势十分明确。
车路协同技术 发展趋势
车路协同技术发展趋势以车路协同技术发展趋势为题,本文将从以下几个方面来探讨车路协同技术的发展趋势。
一、智能化发展趋势随着人工智能和物联网技术的快速发展,智能化已成为车路协同技术发展的必然趋势。
智能化车路协同技术可以通过车载传感器、通信设备和云计算系统实现车辆与道路基础设施的实时交互和信息共享。
未来,车辆将通过自动驾驶系统和智能交通管理系统实现智能路况预测、交通拥堵预警和自动驾驶等功能,进一步提高交通效率和安全性。
二、大数据应用趋势随着车辆和道路基础设施的智能化程度不断提高,大量的交通数据将被采集和存储。
这些数据包括车辆位置、速度、加速度等信息,以及道路状况、交通信号灯状态等信息。
通过对这些大数据的分析和挖掘,可以实现交通拥堵预测、智能导航、交通信号优化等功能。
因此,大数据应用将成为车路协同技术发展的重要趋势。
三、5G通信技术的应用5G通信技术的快速发展将为车路协同技术提供更高的通信带宽和更低的时延。
5G通信技术可以实现车辆与道路基础设施、其他车辆之间的高速通信,从而实现实时的车辆位置、速度、行驶轨迹等信息的交换和共享。
这将为车辆自动驾驶、交通拥堵预测等应用场景提供更好的技术支持,推动车路协同技术的发展。
四、人工智能技术的应用人工智能技术在车路协同技术中的应用将进一步提高交通的智能化水平。
通过人工智能技术,车辆可以实现自主感知、自主决策和自主控制,实现自动驾驶功能。
同时,人工智能技术还可以通过对交通数据的分析和学习,实现交通拥堵预测、交通信号优化等功能,进一步提高交通效率和安全性。
五、安全性的提升在车路协同技术的发展中,安全性始终是重中之重。
未来的车路协同技术将更加注重车辆和道路基础设施之间的安全交互。
通过车辆与道路基础设施之间的实时通信和信息交换,可以实现交通事故的预防和减少。
同时,车辆的自动驾驶系统也将更加注重安全性,通过各种传感器和算法的组合,实现对交通环境的全方位感知和判断,确保行驶安全。
2023-面向自动驾驶的车路协同关键技术与展望(百度)-1
面向自动驾驶的车路协同关键技术与展望(百度)随着科技的不断发展,自动驾驶汽车已逐渐走进我们的生活,成为汽车行业的新热点。
而要想实现真正意义上的自动驾驶,就需要进行车路协同技术的研发。
面向自动驾驶的车路协同关键技术是指,在自动驾驶汽车与路旁物体、其他车辆、交通信号灯等进行通信和协调,以实现道路交通的安全与高效。
下面,我们将从几个方面来具体分析它的技术实现及其展望。
1. 感知技术自动驾驶汽车作为交通参与者,需要对周围的环境、交通状况进行态势感知,并实时判断、规划和决策。
感知技术主要包括摄像头、激光雷达、毫米波雷达等多种传感器,以及视觉、听觉、触觉等多种感知方式的融合,从而实现对环境信息的全方位感知。
2. 识别与推理技术自动驾驶汽车需要对环境进行识别和理解,包括车道、障碍物、交通信号等。
同时,它还需要预测其他车辆和行人的动向。
通过这种技术的应用,自动驾驶汽车可以更好地适应交通状况变化,改善驾驶体验,减少交通事故发生的可能性。
3. 通信技术车路协同的实现离不开广域和局域通信技术的支持。
广域通信技术主要指5G通信技术,用于无线网络与道路之间、车辆与车辆之间的数据传输;局域通信技术主要指DSRC(车辆间通信),用于车辆与交通信号之间的通讯。
4. 制图技术高精度地理信息制图技术是实现自动驾驶汽车的另一个关键技术之一。
通过地面扫描仪、地面相机、卫星遥感等技术,获取道路的精准地图数据,再将其与自动驾驶汽车的感知角度进行匹配,以便更好地控制车辆的行驶。
展望自动驾驶的安全性、稳定性和可靠性一直是业界关注的焦点。
在未来,随着人工智能、大数据、云计算等技术不断演化,自动驾驶汽车的车路协同技术也将更加高效、智能和人性化,将逐渐实现自动驾驶平台的完美交通体系。
未来,无人驾驶将助力城市交通更智能化,更环保,更安全。
智能交通系统中的车路协同技术研究

智能交通系统中的车路协同技术研究近年来,随着城市化进程的加快,交通拥堵问题越来越显著。
传统的交通规划和管理方式已经不能满足现代城市对交通的需求。
因此,智能交通系统应运而生。
智能交通系统是指通过先进的技术手段,将交通信息、控制、管理和服务等有关方面的信息集成起来,使其达到高效运作、安全可靠、环保等多重目标。
而车路协同技术作为智能交通系统中的重要技术之一,旨在实现车辆和道路之间的信息交互和资源共享,以提高交通运输系统的整体效率和安全性。
一、车路协同技术的研究现状车路协同技术是智能交通系统的关键技术之一,目前已经成为国内外研究的热点。
在道路交通领域,车路协同技术主要包括车联网技术、智能交通控制技术、交通信息处理与管理技术等。
这些技术相互协作,构建了高效、安全、绿色的交通管理系统。
目前,我国已经开展了大量的车路协同技术研究和实验工作。
比如,我国在2019年率先全球发行了5G自动驾驶公交车,实现了5G无人驾驶技术在城市交通领域的落地应用。
此外,我国还在北京、上海、重庆等城市建设了智慧交通管理平台,以实现交通规划、资源调度和交通管理的现代化。
在国外,车路协同技术已经得到了广泛应用。
美国、欧洲、日本等发达国家都在发展智能交通系统,特别是在智能交通管理、车辆间通信和自动驾驶技术等方面的研究和应用尤为突出。
二、车路协同技术的发展趋势未来,车路协同技术的发展趋势将具有以下几个方面:1. 交通规划、调度和管理将更加精细化。
车路协同技术能够实时监测交通状况、分析路况和根据需求进行调度等,将为交通规划和管理提供更为有效的手段。
2. 无人驾驶技术将得到更广泛的应用。
在无人驾驶技术的支持下,车辆可以自动执行路线规划和交通规则,从而提高交通安全性和避免拥堵。
3. 交通服务将更加多样化和个性化。
车路协同技术可以更好地满足个性化需求,如自定义路线、特殊出行需求等。
4. 内容丰富的位置信息将更为广泛地应用于整个交通系统,以提高信息共享和服务质量。
欧洲对车联网行业的政策扶持
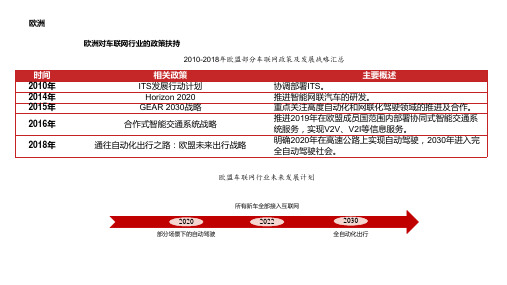
欧盟车联网行业未来发展计划
2020
部分场景下的自动驾驶
所有新车全部接入互联网
2022
2030
全自动化出行
欧洲
时间 2010年 2014年 2015年 2016年 2018年
欧洲对车联网行业的政策扶持
2010-2018年欧盟部分车联网政策及发展战略汇总
相关政策 ITS发展行动计划
Horizon 2020 GEAR 2030战略
合作式智能略
主要概述 协调部署ITS。 推进智能网联汽车的研发。 重点关注高度自动化和网联化驾驶领域的推进及合作。 推进2019年在欧盟成员国范围内部署协同式智能交通系 统服务,实现V2V、V2I等信息服务。 明确2020年在高速公路上实现自动驾驶,2030年进入完 全自动驾驶社会。
2024年智能车路协同系统市场规模分析
2024年智能车路协同系统市场规模分析智能车路协同系统是一种综合应用了车辆、道路以及通信技术的系统,通过车辆与道路之间的信息交互与协调,达到提高交通流畅性、减少交通事故发生率等目标。
近年来,智能车路协同系统市场呈现出快速增长的趋势。
本文将对智能车路协同系统市场规模进行分析。
1. 市场概述智能车路协同系统市场是智能交通领域的一个重要组成部分。
随着信息技术的不断发展,智能车路协同系统的应用场景日益丰富,市场需求日益增长。
智能车路协同系统具备降低交通拥堵、提高交通安全性、提升车辆燃油利用率等优势,受到政府和用户的广泛关注。
目前,全球范围内智能车路协同系统市场规模呈现稳步增长的态势。
2. 市场规模分析2.1 历史数据分析据市场研究数据显示,智能车路协同系统市场自上世纪90年代以来逐渐崭露头角。
起初,市场规模相对较小且发展缓慢,受限于技术、成本等因素。
然而,随着移动互联网的普及和无线通信技术的进步,智能车路协同系统迎来了新的发展机遇。
从2010年开始,市场规模快速增长,年均增长率达到20%以上。
2.2 当前市场状况目前,智能车路协同系统市场呈现出愈发火热的态势。
全球范围内,各国政府纷纷推出政策支持智能车路协同系统的发展,促进市场增长。
同时,智能车路协同系统的技术不断成熟,应用场景逐渐扩大。
智能交通领域的领先企业也加大了研发投入,推动市场进一步扩大。
2.3 预测分析根据市场研究机构的预测,智能车路协同系统市场规模将继续保持高速增长。
预计到2025年,全球智能车路协同系统市场规模将达到X亿美元。
这一预测基于以下几点因素:一是智能交通需求的增长;二是技术的不断突破与创新;三是政府支持力度的增加。
预计未来几年,智能车路协同系统市场将进一步扩大,为行业带来巨大的商机和发展空间。
3. 市场机遇与挑战3.1 市场机遇智能车路协同系统市场面临着巨大的机遇。
一方面,智能交通领域的发展迅速,政府对交通拥堵和交通安全等问题的重视程度不断提高,为智能车路协同系统的应用提供了广阔的市场空间。
车路协同 综述
车路协同综述车路协同是一种新兴的交通系统,它利用无线通信技术建立起车辆与道路之间实时的信息交换平台,使得车辆之间和车辆与道路交通基础设施之间的相互作用得以实现。
车路协同可以提高智能交通系统的效率,降低驾驶员的操作难度和交通事故的发生率。
本文将针对车路协同的定义、技术发展和现有应用进行综述。
一、车路协同的定义二、车路协同技术发展随着无线通信技术的不断发展,车路协同得以快速发展。
目前,车路协同主要采用以下技术:1.车联网技术:车辆通过网络连接起来,形成车联网。
车联网可以使车辆之间实现网络通信和信息交换。
2.5G通信技术:5G通信技术是一种新型的无线通信技术,具有高速率、低延迟和高可靠性的特点,可以提供更加稳定和快速的网络连接。
3.车载传感技术:车载传感器可以感知车辆的状态,如速度、方向和位置等信息。
4.自主驾驶技术:自主驾驶技术可以通过计算机算法和人工智能模型实现自动驾驶,并实现车辆之间的相互协作。
5.车辆识别码技术:车辆识别码技术是一种通过无线电信号识别车辆身份的技术,可以提高车辆安全性和识别误差率。
三、车路协同的现有应用目前,车路协同已经在一些国家得到了广泛的推广和应用,主要的应用包括以下几个方面:1.交通管理:车路协同可以实现交通信号灯的智能化优化控制、追踪道路拥堵状况、提供即时路况等服务。
2.车辆安全:车路协同可以实现预测车辆碰撞的风险,并提示驾驶员进行避免碰撞的操作。
3.自主驾驶:车路协同可以实现车辆之间的自主驾驶协作,使得车辆之间可以互相识别、协调行驶。
4.公共交通:车路协同可以通过车道优化和智能调度实现公共交通的提升,使得公共交通更高效。
随着科技的不断进步和技术的发展,车路协同将会呈现以下发展趋势:1.智能化升级:车路协同将会更加智能化,实现更高效的交通管理和更高安全性的车辆驾驶。
2.更多的应用场景:车路协同的应用范围将得到扩大,同时将覆盖更多的细节应用场景。
3.更加个性化的服务:车路协同将会根据驾驶者的偏好和需求,提供更加个性化的交通服务。
面向智能网联汽车的车路协同感知技术及发展趋势
面向智能网联汽车的车路协同感知技术及发展趋势在科技的海洋中,智能网联汽车如同一艘扬帆起航的巨轮,承载着人类对未来出行的美好憧憬。
而车路协同感知技术,则是这艘巨轮上不可或缺的导航系统,指引着它驶向更加安全、高效、智能的未来。
本文将深入探讨这一技术的奥秘,揭示其发展趋势。
首先,我们要明白车路协同感知技术的核心在于“协同”。
正如一支交响乐团中的乐手们需要相互配合才能奏出和谐美妙的乐曲一样,智能网联汽车与道路基础设施也需要紧密协作,共同构建一个互联互通的信息网络。
在这个网络中,车辆不再是孤立的个体,而是成为了整个交通生态系统中的一个节点,能够实时获取并共享周围环境的信息。
这种信息共享的方式犹如蜜蜂之间的舞蹈传递花蜜的位置,使得每一辆智能网联汽车都能像拥有了一双“千里眼”和一对“顺风耳”,对周围的路况、天气、障碍物等了如指掌。
这不仅极大地提高了行车的安全性,还为自动驾驶技术的发展奠定了坚实的基础。
然而,车路协同感知技术的发展并非一帆风顺。
目前,这一技术还面临着诸多挑战。
比如,如何确保信息传输的稳定性和安全性?如何实现不同品牌、不同型号汽车之间的互联互通?如何平衡隐私保护与数据利用的关系?这些问题都亟待我们去思考和解决。
展望未来,车路协同感知技术的发展趋势将呈现出以下特点:1.标准化与互操作性:随着技术的不断成熟和市场的逐渐统一,行业标准将逐步建立和完善,不同品牌和型号的智能网联汽车将能够无缝对接和协同工作。
2.智能化与自动化:借助人工智能、大数据等先进技术,车路协同感知系统将变得更加智能化和自动化,能够自主学习和优化决策过程。
3.安全性与可靠性:随着技术的不断进步和应用范围的扩大,系统的安全性和可靠性将成为重中之重。
我们将看到更多针对网络安全、数据保护等方面的创新解决方案的出现。
4.个性化与定制化:未来的车路协同感知系统将更加注重用户体验,提供更加个性化和定制化的服务,以满足不同用户的需求。
5.绿色化与可持续性:在环保理念日益深入人心的背景下,车路协同感知技术也将致力于降低能耗、减少排放,推动智能交通系统的绿色发展。
车路协同技术
车路协同技术随着智能交通系统的发展和普及,车路协同技术作为其中的重要组成部分,正成为解决交通拥堵、提高交通效率的有效手段。
本文将探讨车路协同技术的定义、应用、挑战和发展前景。
一、车路协同技术的定义车路协同技术是指基于智能交通系统的思想,通过车辆与道路设施之间的信息交换和共享,以及交通管理者与驾驶员的协同合作,实现交通系统的互联互通,从而提高交通效率、减少时间成本、改善行车安全。
二、车路协同技术的应用1. 交通流优化:车路协同技术可以通过实时监测交通状况,及时调整信号灯控制、限速措施等,优化交通流的分配和引导,降低交通拥堵,提高道路通行能力。
2. 信号协调:通过车辆的定位和交通信号的控制,车路协同技术可以实现交通信号的协调和同步,减少交通灯停留时间,提高整体交通效率。
3. 路况共享:车辆通过车载设备将实时的路况信息上传至交通管理中心,交通管理者可以通过这些数据及时了解路况情况,作出相应的调整措施,提供给其他车辆导航系统,从而减少交通事故和拥堵。
4. 高速公路自动驾驶系统:通过车辆与道路设施的信息交互,自动驾驶系统可以实时感知道路状况、车辆密度等,从而进行自主的车辆控制和行驶规划,提高高速公路上的行车安全性和通行效率。
5. 智能停车导航:停车成为城市交通拥堵的主要原因之一,车路协同技术可以通过车辆和停车场的信息交流,提供实时的停车位导航和预约系统,减少在寻找停车位上的浪费时间和资源。
三、车路协同技术的挑战1. 数据安全和隐私问题:车路协同技术需要大量的车辆和道路设施之间的信息交换,这就带来了个人隐私及数据安全的风险,如何保护用户的个人信息和交通数据,是车路协同技术发展中的一大挑战。
2. 技术标准和统一性:车路协同技术需要各类设备、车辆以及交通管理者之间的协同合作,需要制定一套统一的标准和规范,以确保不同设备之间的互联互通。
3. 技术成本和更新迭代:车路协同技术需要大量的智能设备和基础设施的支持,这将涉及新的投资和技术成本。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
欧洲车路协同技术发展与展望车路协同技术是基于车车通信与车路通信技术的智能交通技术。
车辆之间和车辆与路侧系统能实时交换车辆传感器与事故信息,从而增强驾驶员对前方路况的了解,及时采取有效措施。
路侧系统和交通管理中心也可以通过车路通信及时提供实时路况信息,因此车路协同技术能有效提高道路安全和交通效率。
欧洲的车路协同技术经过了大约10年的技术研发,随着技术标准的制定与完善,已经进入了大规模路测和市场部署的准备阶段。
欧盟,欧洲车厂,系统提供商和相关产业正在积极推动协同系统的发展,计划从2015年开始进入市场。
日立一直积极参与车路协同技术的研发,测试与技术标准制定工作。
是欧洲大型车路协同系统路测项目的主要技术提供商。
本文介绍车路协同技术在欧洲的开发与前景,包括2012年世界智能交通大会展示的车路协同项目,欧洲大规模路测项目与采用的关键技术,技术标准的制定以及开发部署计划。
1、2012智能交通世界大会展示的车路协同项目·车路协同项目是2012年智能交通世界大会的重点展示项目。
欧洲车车通信联盟(car to car communication consortium C2C CC)[1]联同奥地利路侧系统供应商联盟Test Field Telematics组织了为期一周的实地道路展示。
展示的主要目标为:·"车载系统,路侧系统与交通管理中心的通信互通性(communication interoper ability).·"车辆,路侧与交通管理中心的数据融合(Information harmonization)·"车辆协同通信标准的适应性展示·"道路安全,交通效率等应用的实地演示本次展示包括的主要应用有:·"基于车车通信的道路安全应用,如前车紧急刹车风险警报(Electronic brake light warning),摩托车接近风险警报(Motorcycle approaching warning),紧急救援车辆让路信息等等(emergency vehicle approaching warning)。
·"基于车路通信的交通管理应用,如信号灯路口车速控制(Green light optimal speed),路侧动态信息的车载显示(Invehicle signage).本次展示由欧洲大型车路协同道路运行测试项目(Field Operational Tests,FOTs)DRIVEC2X[2]参与并提供技术支持。
日立作为DRIVEC2X项目的技术规格的负责单位,担任了本次展示的技术协调主管,成功演示了车路协同技术由不同车厂和系统供应商的系统集成成果,是C2C-CC首次协同交通管理中心和路侧系统的大型展示。
相对于C2C-CC于2008年举行的车车通信大型展示,该展示突出体现了欧洲针对车路协同系统以车载与路侧系统同步开发为目标的开发部署模式(deployment scenario)。
另外,基于近年欧洲与美国国际标准融合合作,C2CCC和美国车辆协同测试项目CAMP联合进行了车车协同通信共通性演示。
该展示实现了欧洲与美国的主要道路安全应用中心数据包的交换(coreroad safety message),是车路协同项目的通信标准国际融合的主要成果。
另外,参与DRIVEC2X项目的法国国家车路协同FoT项目SCORE@F也在本次大会中进行了静止模拟演示。
参与本次世界大会的车路协同项目展示的主要包括欧洲和国际各大车厂(戴姆勒,宝马,沃尔沃,雷诺,标志,本田,欧宝,福特),系统供应商(电装,日立,NEC,Delphi),交通管理中心(TT)以及科研机构(FOKUS).2、欧洲车路协同项目的系统框架和关键技术车路协同技术是无线通信技术在车,路,交通中心的应用,以允许车辆和路侧的信息融合和交换(如图1所示)。
车路协同技术可根据其系统集成环境分为4大种类:"车载站(Vehicle ITS station):提供车车与车路无线通信技术支持和车载应用支持。
"路侧站(Roadside ITS station):提供路车无线通信技术和与中心站的数据交换,并可针对具体应用需求进行数据处理和数据提供。
"中心站(Central ITS station):中心站可通过有线或无线网络与其他站进行数据交换,可集成入交通管理中心或者telematics服务中心."用户站(Personal ITS station):可集成于个人用户系统(e.g.智能手机或导航仪).图1:车路协同系统([3])无线频段5,795-5,825(ITSG5A和ITSG5B)已经被欧盟分配在交通安全和交通管理等应用上。
然而,车路协同也可以在非安全应用上使用其他通信技术(比如3G/4G)。
欧洲电信通信标准协会ITS标准委员会(ETSITCITS)为各类协同系统站(ITS 站)制定了统一的功能性框架(如图2所示)。
一个ITS站可划分为以下功能层:"信道技术层(access layer):提供物理层与介质访问控制层服务。
"网络交通层(Networking&Transport layer):提供数据路由与传输服务。
"服务设施层(Facilities layer):为多个应用提供高层数据传输协议与信息管理服务。
"应用层(Application layer):车路协同应用。
"跨层管理(Management layer):提供跨层管理以及站内数据交换服务。
"安全(Security Entity):为各层提供通信安全和凭证应用与更新服务(Certificate Update).图2:ITS S communication reference architecture([3]) ETSI定义的统一架构是开放式的,该架构支持多应用,多通信堆栈,多信道技术,为多模式应用和未来系统开发提供了架构支持。
目前针对车路协同技术的研发工作已经臻于成熟。
近两年,欧洲致力于车路协同技术的大规模道路运行测试项目DRIVEC2X。
DRIVEC2X涵盖了欧洲7国(德国,法国,荷兰,意大利,西班牙,芬兰,瑞典)的车路协同系统测试项目,测试的主要目的为:"针对5.9Ghz的车路协同系统的关键技术进行标准适应性和性能测试。
"车路协同系统在现有道路运行的适应性以及多方面应用的性能评价。
"创建泛欧洲车路协同项目的统一测试架构与评估平台。
DRIVEC2X项目的主要测试应用包括道路安全,交通管理与环境保护,商业应用等。
项目开发和测试的主要关键技术包括:"ITSG5接入技术:ITSG5提供快速信道接入(short latency radio access)与对等通信(ad hoc communication),以满足道路安全应用的短时数据交换的需求以及避免对通信基础设施的依赖性。
ITSG5技术采用IEEE802.11p标准,该标准是基于WiFi(IEEE802.11)的技术改进并支持广播传输协议,由电气电子工程师学会IEEE于2010年发表。
尽管ITSG5与美国DSRC使用同一频段,欧洲ITSG5的带宽较之DSRC窄。
欧洲电信通信标准协会ETSI发表了欧洲应用方案以适应欧洲带宽设置.是车车与车路通信的关键技术。
ITSG5涵盖了50MHz 的总带宽,其中,ITSG5A(5.875-5.905Ghz)主要用于交通安全应用,ITSG5B(5.855-5.875GHz)主要应用于交通效率管理应用,该频段已被欧洲划为车路协同技术的专用频段,以降低干扰和提高通信可靠性。
另外ITSG5C(5470MHz-5725MHz)则属于公共频段(ISM),可用于支持其他的ITS 应用。
根据ETSI制定的标准设置,ITSG5的典型发射范围为300-500米,路侧站发射范围可达到800-1200米。
可满足基本道路安全应用的需求。
"地理位置路由通信协议(Geo Networking):地理位置路由协议利用地理位置信息作为数据包的寻址方案(addressing scheme),区别于由IP地址为主的IP路由协议。
该协议适用于车辆的动态移动,以满足车路协同系统应用的以地理区域为数据传播目的区域的需求。
以车车通信实现的道路安全应用为例,车辆一旦检测到交通安全隐患(例如由交通事故引发的非正常停车),车载站发送的事故风险警报信息所要求的发送区域为停车事故车后方几百米至几公里的地理范围,以确保接收车辆能及时处理信息并通知驾驶员采取有效措施避免二次事故(secondary accidents),以地理位置为寻址方案的网络层协议能有效实现此类需求。
另外,地理位置协议堆栈(Protocol stack)支持单跳以及多跳(multi-hop),因此车载站或者路侧站可作为中转路由站,以扩大数据的传输范围。
"信息传输协议:信息传输协议是服务设置层的通信协议,提供ITS应用所需的站间数据交换的支持。
DRIVEC2X系统实现了一系列标准化信息传输协议构件,包括车车直接交换数据协议和车路交换数据协议:o 合作意识信息交换协议(Cooperative Awareness Message CAM):该协议是车车通信的心跳协议。
车载站定期发射车辆地理位置,车速,车载系统状态(加速度,刹车系数,车载灯开启状态等等)。
该数据由车载站以1至10赫兹的发射频率广播传输至所有在直接信号接收范围内的车载接收站。
该协议允许车辆实时意识到邻近车辆的动态与驾驶动向,以提前预测碰撞风险并提醒驾驶员采取有效措施。
该协议标准由ETSITCITS制定并预定于2013年发表。
o 突发事件警报协议(Decentralized Event Notification Message DENM):由ITS站基于交通安全事故或驾驶危险环境或引发的警报协议。
一旦通过车载电子设备检测到安全隐患事件,车载站相关应用就立即发射DENM信息。
根据事件发生地点与事件类型,DENM的发射范围可从几百米至几公里不等。
DENM数据包提供安全隐患类型,地理位置,持续时间,受影响路段等信息。
接收车辆可对比车辆自身位置与行车路线判断事件对自车的关联性并预测可能的碰撞风险和提前通知驾驶员采取有效措施。
DENM的发射频率为1至10赫兹不等,发射持续时间根据事件类型决定。
如果检测事件是动态事件,DENM 的内容可实时更新。
该协议标准由ETSITCITS制定并预定于2013年发表。
o 交通灯信号相信息(Signal Phaseand Timing message SPAT):该协议由路侧站通过车路无线网发射实时交通灯信号信息,包括信号当前相位(红,绿,黄)与持续时间,以及预测交通灯相交换信息与预测相位交换时间。