matlab中robotics工具箱的几个指令的使用
matlab中robotics toolbox的应用
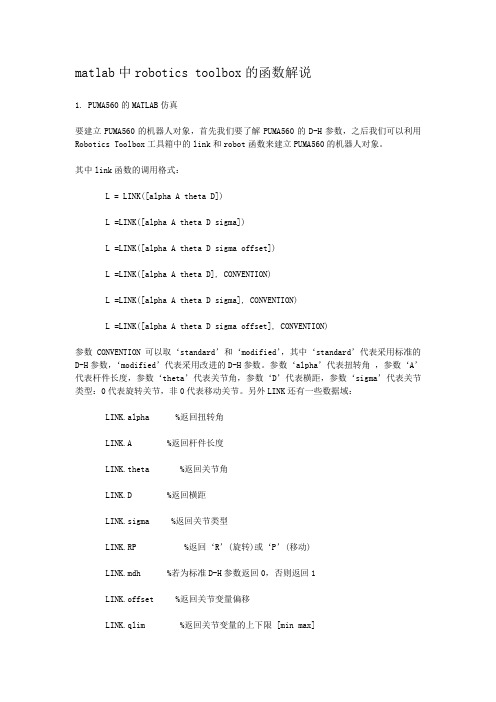
matlab中robotics toolbox的函数解说1. PUMA560的MATLAB仿真要建立PUMA560的机器人对象,首先我们要了解PUMA560的D-H参数,之后我们可以利用Robotics Toolbox工具箱中的link和robot函数来建立PUMA560的机器人对象。
其中link函数的调用格式:L = LINK([alpha A theta D])L =LINK([alpha A theta D sigma])L =LINK([alpha A theta D sigma offset])L =LINK([alpha A theta D], CONVENTION)L =LINK([alpha A theta D sigma], CONVENTION)L =LINK([alpha A theta D sigma offset], CONVENTION)参数CONVENTION可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H参数,‘modified’代表采用改进的D-H参数。
参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0代表旋转关节,非0代表移动关节。
另外LINK还有一些数据域:LINK.alpha %返回扭转角LINK.A %返回杆件长度LINK.theta %返回关节角LINK.D %返回横距LINK.sigma %返回关节类型LINK.RP %返回‘R’(旋转)或‘P’(移动)LINK.mdh %若为标准D-H参数返回0,否则返回1LINK.offset %返回关节变量偏移LINK.qlim %返回关节变量的上下限 [min max]LINK.islimit(q) %如果关节变量超限,返回 -1, 0, +1LINK.I %返回一个3×3 对称惯性矩阵LINK.m %返回关节质量LINK.r %返回3×1的关节齿轮向量LINK.G %返回齿轮的传动比LINK.Jm %返回电机惯性LINK.B %返回粘性摩擦LINK.Tc %返回库仑摩擦LINK.dh return legacy DH rowLINK.dyn return legacy DYN row其中robot函数的调用格式:ROBOT %创建一个空的机器人对象ROBOT(robot) %创建robot的一个副本ROBOT(robot, LINK) %用LINK来创建新机器人对象来代替robotROBOT(LINK, ...) %用LINK来创建一个机器人对象ROBOT(DH, ...) %用D-H矩阵来创建一个机器人对象ROBOT(DYN, ...) %用DYN矩阵来创建一个机器人对象2.变换矩阵利用MATLAB中Robotics Toolbox工具箱中的transl、rotx、roty和rotz可以实现用齐次变换矩阵表示平移变换和旋转变换。
MATLAB机器学习工具箱的使用方法
MATLAB机器学习工具箱的使用方法1. 引言在现代科技发展的背景下,机器学习在各个领域中的应用越来越广泛。
而MATLAB作为一款功能强大的数学软件,其机器学习工具箱为用户提供了丰富的算法和工具,方便快捷地进行机器学习任务。
本文将详细介绍MATLAB机器学习工具箱的使用方法,帮助读者更好地利用这个工具箱进行数据分析、模型训练和结果评估等任务。
2. 数据预处理在进行机器学习任务之前,首先需要对数据进行预处理。
MATLAB机器学习工具箱提供了多种数据预处理的方法和函数,如数据清洗、特征选择、数据变换等。
可以使用`preprocess`函数对数据进行缺失值处理,使用`featureselect`函数进行特征选择,或者使用`datapreprocessing`函数进行数据变换。
通过这些预处理的方法,可以使得数据更好地适用于后续的机器学习算法。
3. 特征工程特征工程是机器学习中一个重要的环节,它的目的是将原始数据转换为能够更好地反映问题特点的特征。
MATLAB机器学习工具箱提供了丰富的特征工程方法和函数,如特征提取、特征转换和特征选择等。
可以使用`featureextract`函数对原始数据进行特征提取,使用`featuretransform`函数进行特征转换,或者使用`featureselect`函数进行特征选择。
这些方法和函数的灵活使用可以帮助用户更好地理解数据并选择合适的特征。
4. 模型选择与训练在进行机器学习任务的过程中,选择适合问题的机器学习模型是非常重要的。
MATLAB机器学习工具箱提供了多种常见的机器学习模型,如线性回归、决策树、支持向量机等。
可以使用`fitmodel`函数来选择和训练机器学习模型。
用户可以根据具体的问题需求选择合适的模型,并通过调整模型参数来优化模型性能。
5. 模型评估与调优在完成模型的训练之后,需要对模型的性能进行评估和调优。
MATLAB机器学习工具箱提供了多种模型评估的方法和函数,如交叉验证、ROC曲线分析、精确度和召回率等。
Robotics ToolBox使用方法
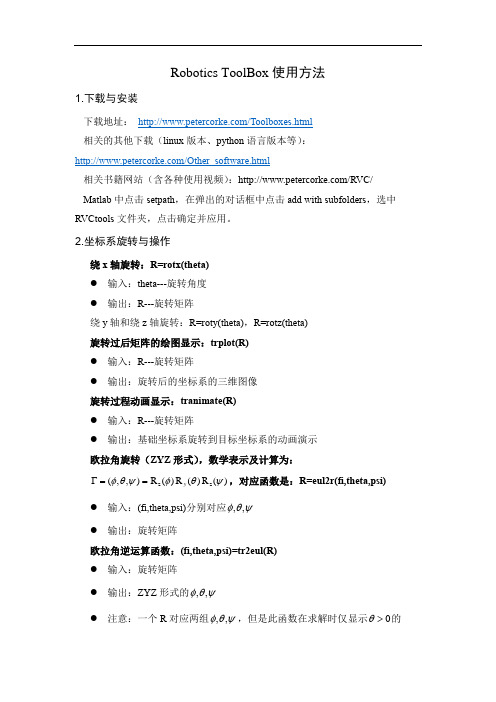
Robotics ToolBox 使用方法1.下载与安装下载地址:/Toolboxes.html相关的其他下载(linux 版本、python 语言版本等):/Other_software.html相关书籍网站(含各种使用视频):/RVC/Matlab 中点击setpath ,在弹出的对话框中点击add with subfolders ,选中RVCtools 文件夹,点击确定并应用。
2.坐标系旋转与操作绕x 轴旋转:R=rotx(theta)● 输入:theta---旋转角度● 输出:R---旋转矩阵绕y 轴和绕z 轴旋转:R=roty(theta),R=rotz(theta)旋转过后矩阵的绘图显示:trplot(R)● 输入:R---旋转矩阵● 输出:旋转后的坐标系的三维图像旋转过程动画显示:tranimate(R)● 输入:R---旋转矩阵● 输出:基础坐标系旋转到目标坐标系的动画演示欧拉角旋转(ZYZ 形式),数学表示及计算为:z z (,,)R ()R ()R ()y φθψφθψΓ==,对应函数是:R=eul2r(fi,theta,psi)● 输入:(fi,theta,psi)分别对应,,φθψ● 输出:旋转矩阵欧拉角逆运算函数:(fi,theta,psi)=tr2eul(R)● 输入:旋转矩阵● 输出:ZYZ 形式的,,φθψ● 注意:一个R 对应两组,,φθψ,但是此函数在求解时仅显示0θ>的解。
● 当0θ=对应于奇异值,也被称为万向节死锁(Gimbal lock ),得到的值为:φψ+,网上有讲:/soroman/archive/2008/03/24/1118996.html 。
(使用3个量来表示3维空间的朝向的系统都会遭遇这个问题,除非用4个量来表示,如四元数)rpy (roll-pitch-yaw )角,又被称为Cardan angles ,计算旋转矩阵SO(3)的函数为:R=rpy2r(theta_r, theta_p, theta_y)● 输入:rpy 角,theta_r, theta_p, theta_y● 输出:旋转矩阵Cardan angles 逆运算函数:(theta_r, theta_p, theta_y)=tr2rpy(R)● 输入:旋转矩阵R● 输出:rpy 角,,,r p y θθθ● 注意:与欧拉角逆变换不同,这里一个R 对应一组,,r p y θθθ● 当2p πθ=±时,达到奇异值或者Gimbal lock ,得到的值为r y θθ+ []xx x y y y z z z n o a R n o a n o a ⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦n o a ,其中=⨯n o a 由o 和a 计算R 的函数为:R=oa2r(q_o,q_a)● 输入:o 和a ,也即单位向量q_o 与q_a● 输出:旋转矩阵R求解旋转矩阵对应的旋转轴及旋转角度即为求旋转矩阵对应的特征值和特征向量:[v,lambda]=eig(R)● 输入:旋转矩阵R● 输出:3*3矩阵v 及3*3特征向量lambda ,其中v 向量对应于lambda=1的列即为旋转轴,lambda 其他的虚数对应辐角即为旋转角度。
Matlab中的运动规划和轨迹生成技巧

Matlab中的运动规划和轨迹生成技巧引言:Matlab是一种功能强大的数学软件,广泛用于科学研究、工程计算和数据分析等领域。
在机器人技术中,运动规划和轨迹生成是非常重要的环节。
本文将介绍在Matlab中进行运动规划和轨迹生成的一些基本技巧和实用工具,帮助读者更好地掌握这一领域。
一、运动规划基础运动规划是研究如何使机器人在给定约束条件下完成所需任务的过程。
常见的运动规划方法包括逆向运动学、欧拉角和四元数表示等。
在Matlab中,可以使用机器人学工具箱(Robotics Toolbox)来进行运动规划。
该工具箱提供了一系列函数,用于实现机器人的正逆向运动学计算、碰撞检测和轨迹规划等功能。
二、轨迹生成技巧1. 插值法轨迹的插值是生成平滑运动的常用技巧。
Matlab中有多种插值方法,如线性插值、样条插值和最小二乘法插值等。
通过对已知数据点进行插值,可以得到平滑的轨迹曲线,使机器人的运动更加平稳。
2. 优化算法优化算法常用于解决轨迹生成中的优化问题。
Matlab中提供了一些强大的优化函数,如fmincon和fminunc等。
可以使用这些函数对运动学约束、机器人能力和任务目标进行优化,并生成最佳轨迹。
三、示例应用为了更好地理解运动规划和轨迹生成技巧在实际应用中的作用,我们以机械臂路径规划为例进行说明。
假设我们有一个三自由度机械臂,需要实现从初始位置到目标位置的平滑运动。
首先,我们可以利用机器人学工具箱计算机械臂的逆向运动学,确定关节角度。
然后,通过插值法生成关节角度的平滑过渡曲线,并利用优化算法解决机械臂关节运动的优化问题。
最后,根据优化的结果,通过逆向运动学计算获得末端执行器的位置和姿态,从而生成最佳轨迹。
四、工具箱推荐除了Matlab内置的机器人学工具箱外,还有一些第三方工具箱可以用于运动规划和轨迹生成。
例如,Peter Corke开发的Robotics System Toolbox是一个强大且易于使用的工具箱,提供了丰富的功能,包括机器人建模、路径规划和轨迹生成等。
MATLAB操作命令大全
MATLAB操作命令大全1.基本操作:- clear: 清除工作区中的所有变量。
- clc: 清除命令窗口的内容。
- close all: 关闭所有图形窗口。
- help function-name: 显示与函数相关的帮助文档。
- who: 显示当前工作区中的所有变量。
- save file-name: 保存当前工作区中的所有变量到指定的文件。
- load file-name: 从文件中加载变量到当前工作区。
2.变量操作:-=:赋值操作符,将右边的值赋给左边的变量。
-+:加法操作符。
--:减法操作符。
-*:乘法操作符。
-/:除法操作符。
-^:幂运算操作符。
- sqrt(x): 计算 x 的平方根。
- abs(x): 计算 x 的绝对值。
- max(x): 返回 x 中的最大值。
- min(x): 返回 x 中的最小值。
- sum(x): 计算 x 中所有元素的和。
3.数组操作:- zeros(m, n): 创建一个 m 行 n 列的全零数组。
- ones(m, n): 创建一个 m 行 n 列的全一数组。
- eye(n): 创建一个 n 行 n 列的单位矩阵。
- size(x): 返回 x 的维度。
- length(x): 返回 x 的长度。
- reshape(x, m, n): 将 x 重新排列为一个 m 行 n 列矩阵。
- transpose(x): 将 x 的行和列互换。
4.控制流程:- if-else: 条件语句,根据条件执行不同的代码块。
- for loop: 循环语句,执行指定次数的代码块。
- while loop: 循环语句,根据条件反复执行代码块。
- break: 在循环中使用,用来跳出当前循环。
- continue: 在循环中使用,用来跳过当前循环的剩余部分。
5.统计分析:- mean(x): 计算 x 的平均值。
- median(x): 计算 x 的中位数。
- std(x): 计算 x 的标准差。
对于在matlab中的robotics工具箱几个指令的使用文档

机器人PUMA560 的MATLAB 仿真要建立PUMA560 的机器人对象,首先我们要了解PUMA560 的D-H 参数,之后我们可以利用Robotics Toolbox 工具箱中的link 和robot 函数来建立PUMA560 的机器人对象。
其中link 函数的调用格式:L = LINK([alpha A theta D])L =LINK([alpha A theta D sigma])L =LINK([alpha A theta D sigma offset])L =LINK([alpha A theta D], CONVENTION)L =LINK([alpha A theta D sigma], CONVENTION)L =LINK([alpha A theta D sigma offset], CONVENTION)参数CONVENTION 可以取‘standard’和‘modified’,其中‘standard’代表采用标准的D-H 参数,‘modified’代表采用改进的D-H 参数。
参数‘alpha’代表扭转角,参数‘A’代表杆件长度,参数‘theta’代表关节角,参数‘D’代表横距,参数‘sigma’代表关节类型:0 代表旋转关节,非0 代表移动关节。
另外LINK 还有一些数据域:LINK.alpha %返回扭转角LINK.A %返回杆件长度LINK.theta %返回关节角LINK.D %返回横距LINK.sigma %返回关节类型LINK.RP %返回‘R’(旋转)或‘P’(移动)LINK.mdh %若为标准D-H 参数返回0,否则返回1LINK.offset %返回关节变量偏移LINK.qlim %返回关节变量的上下限[min max]LINK.islimit(q) %如果关节变量超限,返回-1, 0, +1LINK.I %返回一个3×3 对称惯性矩阵LINK.m %返回关节质量LINK.r %返回3×1 的关节齿轮向量LINK.G %返回齿轮的传动比LINK.Jm %返回电机惯性LINK.B %返回粘性摩擦LINK.Tc %返回库仑摩擦LINK.dh return legacy DH rowLINK.dyn return legacy DYN row其中robot 函数的调用格式:ROBOT %创建一个空的机器人对象ROBOT(robot) %创建robot 的一个副本ROBOT(robot, LINK) %用LINK 来创建新机器人对象来代替robotROBOT(LINK, ...) %用LINK 来创建一个机器人对象ROBOT(DH, ...) %用D-H 矩阵来创建一个机器人对象ROBOT(DYN, ...) %用DYN 矩阵来创建一个机器人对象利用MATLAB 中Robotics Toolbox 工具箱中的transl、rotx、roty 和rotz 可以实现用齐次变换矩阵表示平移变换和旋转变换。
MATLAB工具箱的功能及使用方法
MATLAB工具箱的功能及使用方法引言:MATLAB是一种常用的用于数值计算和科学工程计算的高级计算机语言和环境。
它的灵活性和强大的计算能力使得它成为工程师、科学家和研究人员的首选工具之一。
而在MATLAB中,工具箱则提供了各种专业领域的功能扩展,使得用户能够更方便地进行数据分析、信号处理、优化和控制系统设计等任务。
本文将介绍MATLAB工具箱的一些常见功能及使用方法,并探讨其在不同领域中的应用。
一、图像处理工具箱图像处理工具箱(Image Processing Toolbox)是MATLAB的核心工具之一,它提供了一套强大的函数和算法用于处理和分析数字图像。
在图像处理方面,可以使用MATLAB工具箱实现各种操作,如图像增强、降噪、边缘检测、图像分割等。
其中最常用的函数之一是imread,用于读取图像文件,并将其转换为MATLAB中的矩阵形式进行处理。
此外,还有imwrite函数用于将处理后的图像保存为指定的文件格式。
二、信号处理工具箱信号处理工具箱(Signal Processing Toolbox)是用于处理连续时间和离散时间信号的工具箱。
它提供了一系列的函数和工具用于信号的分析、滤波、变换和频谱分析等操作。
在该工具箱中,最常用的函数之一是fft,用于计算信号的快速傅里叶变换,从而获取信号的频谱信息。
此外,还有滤波器设计函数,用于设计和实现各种数字滤波器,如低通滤波器、高通滤波器和带通滤波器等。
三、优化工具箱优化工具箱(Optimization Toolbox)提供了解决各种优化问题的函数和算法。
MATLAB中的优化工具箱支持线性规划、非线性规划、整数规划、二次规划等多种优化问题的求解。
其中最常用的函数之一是fmincon,用于求解无约束和约束的非线性优化问题。
通过传入目标函数和约束条件,该函数可以找到满足最优性和约束条件的最优解。
四、控制系统工具箱控制系统工具箱(Control System Toolbox)用于建模、设计和分析各种控制系统。
matlab 中robatics工具包的inverse kinematics指令
MATLAB中Robotics工具包的Inverse Kinematics指令1. 简介在机器人学中,逆运动学是一个重要的问题。
它涉及到根据机器人末端执行器的位置和姿态,计算出使得末端执行器达到所需位置和姿态的关节角度。
MATLAB提供了一个强大的工具包——Robotics System Toolbox,其中包含了许多用于机器人运动学和逆运动学分析的函数和类。
本文将重点介绍该工具包中的Inverse Kinematics指令。
2. Robotics System Toolbox简介Robotics System Toolbox是MATLAB中专门用于机器人建模、仿真和控制的一个工具箱。
它提供了一系列函数、类和工具,方便用户进行机器人相关任务的开发和研究。
其中,Inverse Kinematics指令是该工具箱中一个非常有用且常用的功能。
3. Inverse Kinematics(逆运动学)逆运动学是机器人学中的一个重要问题。
在许多应用中,我们需要控制机器人末端执行器(如手臂、夹爪等)达到特定位置和姿态。
而逆运动学就是根据末端执行器所需位置和姿态,计算出使得机械臂关节角度满足要求的问题。
4. Inverse Kinematics指令在MATLAB的Robotics System Toolbox中,提供了一个方便的函数来解决逆运动学问题。
该函数是inverseKinematics,使用该函数可以实现对机器人关节角度的逆运动学求解。
4.1 函数语法ik = inverseKinematics('RigidBodyTree')其中,’RigidBodyTree’是一个机器人模型对象,用于描述机器人的结构和关节参数。
4.2 参数说明•'RigidBodyTree':一个由Robotics System Toolbox提供的机器人模型对象。
该对象包含了机器人的结构、关节参数等信息。
matlab机器人工具箱函数
matlab机器人工具箱函数使用Matlab机器人工具箱进行轨迹规划和控制Matlab机器人工具箱是一个常用的用于机器人建模、仿真、控制和运动规划的工具箱。
其中包含了众多函数,能够帮助用户快速完成机器人任务的规划和控制。
本文将介绍Matlab机器人工具箱的一些常用函数,包括轨迹规划、控制和运动学分析等方面。
1. 轨迹规划轨迹规划是机器人控制中的一个重要环节。
Matlab机器人工具箱中内置了许多轨迹规划函数,其中最常用的是trapezoidal和cubic spline函数。
Trapezoidal函数是一种基于梯形速度剖面的轨迹规划方法,能够保证机器人在规定的时间内从起始点到达终点,并且经过指定的路线。
使用该函数时需要指定起始点、终点、时间和最大速度等参数,例如:traj = trapveltraj(q0,qf,t,vmax,amax);其中,q0和qf是起始点和终点的位置,t是规定的时间,vmax和amax是机器人的最大速度和加速度。
Cubic spline函数是一种基于三次多项式的轨迹规划方法,能够实现平滑的轨迹规划。
该函数能够自动选择合适的多项式系数,以满足起始点、终点和速度等限制条件。
使用该函数时需要指定起始点、终点、时间和边界条件等参数,例如:[q,qd,qdd] = cubicpolytraj(q0,qf,t,qd0,qdf);其中,q0和qf是起始点和终点的位置,t是规定的时间,qd0和qdf是起始点和终点的速度。
2. 控制控制是机器人控制中的核心内容之一。
Matlab机器人工具箱中提供了许多控制函数,包括PID控制器、模型预测控制器和自适应控制器等。
PID控制器是一种基于比例、积分和微分三个控制分量的控制方法,能够实现快速响应和稳定性能。
使用该函数时需要指定比例、积分和微分系数,例如:Kp = 1; Ki = 0.1; Kd = 0.01;pidController = pid(Kp,Ki,Kd);Model Predictive Control(MPC)是一种基于模型的控制方法,能够预测机器人的未来状态,并基于预测结果进行控制。
MATLAB中的帮助指令的使用

MATLAB中的帮助指令的使用
在MATLAB中,帮助指令是一个极其有用的工具,用于获取有关内置函数、语法和常见问题的详细信息。
本文将介绍MATLAB中常用的帮助指令以及如何使用它们。
3. lookfor指令:lookfor指令用于函数和命令的摘要,以便找到与给定关键字匹配的函数或命令。
在命令窗口中输入lookfor keyword(关键字)即可列出所有匹配的函数和命令。
5. verLess下的帮助命令:有些MATLAB工具箱或应用程序包含更多的帮助函数,可以使用其中的特定帮助命令获取更多细节。
例如,instrument toolbox中的toolboxinfo命令可以显示有关工具箱的详细信息。
7. 扩展帮助-命令窗口:MATLAB在命令窗口中提供了更多的帮助功能。
例如,通过使用“tab”键进行命令补全,可以了解命令和函数的所有可用选项。
还可以使用“?(两个问号)”符号来查看函数的源代码,这将打开一个新窗口显示函数的实际代码。
8. MATLAB文档:MATLAB的官方文档是最全面和详细的资源,提供了关于所有MATLAB函数和工具的详细说明。
您可以在MATLAB的官方网站上找到文档,或在MATLAB中使用前面提到的doc指令打开文档。
MATLAB在机器人控制中的使用教程

MATLAB在机器人控制中的使用教程导言:机器人控制是现代工业和科研中的重要领域。
MATLAB作为一种强大的计算工具,提供了丰富的功能和工具箱,可以在机器人控制中发挥重要作用。
本文将介绍MATLAB在机器人控制中的使用教程,并深入探讨其中的关键概念和技术。
一、MATLAB中的机器人建模1. 机器人建模的概念和意义在机器人控制中,建模是实现各种控制算法的基础。
机器人建模的目的是将机器人的动力学特性抽象为数学模型,以方便控制算法的开发和仿真验证。
MATLAB提供了机器人工具箱(Robotics Toolbox),其中包括了常见的机器人模型和动力学模型,方便用户进行建模和分析。
2. 刚体变换和坐标系机器人建模中重要的概念之一是刚体变换和坐标系。
刚体变换描述了一个物体在三维空间中的平移和旋转,它们的组合可以描述机器人的末端执行器在空间中的位置和姿态。
MATLAB中的Homogeneous Transformations(齐次变换矩阵)提供了一种便捷的方式来表示刚体变换和坐标系之间的关系。
3. 建模示例以一个简单的二自由度机械臂为例,介绍如何在MATLAB中建立机器人模型。
首先,需要定义机器人的连接方式和几何结构,包括关节类型、关节限制等。
然后,根据机械结构确定机器人的运动学方程和动力学方程。
最后,结合机器人工具箱提供的函数,可以快速地生成机器人模型,并进行运动学和动力学分析。
二、MATLAB中的机器人控制1. 机器人运动学分析机器人运动学是研究机器人运动和位置的学科,是机器人控制的重要组成部分。
MATLAB提供了丰富的运动学函数和工具箱,可以帮助用户进行机器人的正向和逆向运动学分析。
通过正向运动学,可以根据给定的关节角度计算出末端执行器的位置和姿态。
通过逆向运动学,可以根据给定的末端执行器的位置和姿态计算出关节角度。
2. 机器人轨迹规划与插补轨迹规划是指在给定起始点和目标点的情况下,生成机器人的轨迹,使得机器人在指定时间内平稳地从起始点运动到目标点。
MATLABRoboticsToolbox机械臂建模实战(1)——常用函数语法规则
MATLABRoboticsToolbox机械臂建模实战(1)——常⽤函数语法规则@⽬录常⽤函数语法Link——定义机器⼈关节% theta d a alpha sigmaL(1) = Link([ 0 0 10 0 0 ]);L(2) = Link([ 0 0 20 0 0 ]);前四个为机械臂的DH参数,sigma为0时表⽰转动关节,⾮0时表⽰移动关节Link中还可设置其他多个参数,详情参阅附件。
jtraj——计算关节空间的轨迹[Q,QD,QDD] = jtraj(Q0, QF, M, QD0, QDF)[Q,QD,QDD] = jtraj(Q0, QF, T, QD0, QDF)语法规则Q(M×N)是每个关节按照步长M或时间向量T从Q0变换到QF的位置Q、时间QD、和加速度QDD的值,⼀⾏表⽰每⼀步或每⼀个时间点,⼀列表⽰每⼀个关节。
五次(5次)多项式⽤于速度和加速度的默认零边界条件。
QD0和QDF表⽰每个关节的初始速度与末端速度,可省略。
举例例:两个关节,分别从0转动到90°和从45°转动到180°init = [0 pi/4];targ = [pi/2 pi];step = 200;[q,qd,qdd]=jtraj(init,targ,step);注:jtraj的计算与机械臂结构⽆关,仅计算⼀个关节的转动⾓度。
所以可以看到输⼊函数中没有与机械臂定义的量(如L(1))fkine——输出机器⼈末端的齐次变换矩阵ETS.fkine(Q, OPTIONS)ETS.fkine(Q, N, OPTIONS)语法规则ETS——初等变换序列类计算在某⼀⾓度Q(1×N)下机器⼈末端相对于⾸端的齐次变换矩阵OPTIONS,默认弧度制,需要⾓度制时,使⽤'deg'N,只处理转换序列的前N个元素举例% theta d a alpha sigmaL(1) = Link([ 0 0 10 0 0 ]);L(2) = Link([ 0 0 20 0 0 ]);% 正运动学解算,得到机器⼈末端的齐次变换矩阵T0=robot.fkine(init);Tf=robot.fkine(targ);ctraj——计算在每⼀步(step)变换时的末端相对于⾸端的齐次变换矩阵TC=ctraj(T0,T1,N)语法规则从T0到T1,⼀共经历N步(step),计算每⼀步的齐次变换矩阵举例% theta d a alpha sigmaL(1) = Link([ 0 0 10 0 0 ]);L(2) = Link([ 0 0 20 0 0 ]);% 正运动学解算,得到机器⼈末端的齐次变换矩阵T0=robot.fkine(init);TF=robot.fkine(targ);TC=ctraj(T0,TF,step);transl——将齐次变换矩阵转换为坐标值T = transl(P)语法规则P是ctraj变换得到的每⼀步末端的齐次变换矩阵,通过transl函数,T为每⼀步(step)变换时末端的xyz坐标值(在⾸端坐标系中的坐标值)。
matlab中机器人工具箱生成d-h参数

matlab中机器人工具箱生成d-h参数机器人工具箱(Robotics Toolbox)是MATLAB中常用的一个工具箱,用于辅助机器人的建模、仿真、控制等应用。
其中,机器人的建模主要包括如何确定机器人的d-h参数。
在机器人工具箱中,可以通过函数来自动生成机器人的d-h参数,本文将介绍在MATLAB中机器人工具箱生成d-h参数,并对其进行详细讲解。
1. 基本介绍机器人的d-h参数,全名为Denavit-Hartenberg参数,是一种用于描述机器人关节之间的位置关系的标准方法。
通过确定机器人各关节之间的距离、长度、旋转角度等属性,可以建立机器人的运动模型,进而实现机器人的运动控制等功能。
在机器人工具箱中,可以通过直接设置机器人经d-h参数来实现机器人的建模。
针对机器人的d-h参数,机器人工具箱提供了两种方法来完成参数的确定:手动输入法和自动计算法。
下面我们将依次介绍这两种方法的具体实现过程。
2. 自动计算方法机器人工具箱中提供了一系列函数,可以通过直接调用这些函数来计算机器人的d-h 参数。
这些函数主要包括:- DHparameters:用于生成机器人的d-h参数矩阵- DHFactorization:用于分解机器人的d-h参数矩阵- DYNparameters:用于计算机器人的动力学参数- Link:用于创建机器人的链接对象下面我们将以机器人Puma560为例,介绍自动生成d-h参数的具体步骤。
(1)创建链接对象在MATLAB命令行窗口中,输入以下命令:>> L1 = Link('d',0,'a',0,'alpha',pi/2,'offset',0)上述命令的作用是创建一个名为L1的链接对象,用于描述机器人的第一关节。
其中,'d'表示链接对象相对前一关节坐标系在z方向上的偏移量,'a'表示链接对象相对前一关节坐标系在x方向上的偏移量,'alpha'表示链接对象相对前一关节坐标系的旋转角度,'offset'表示链接对象的初始位移。
MATLAB操作命令大全

MATLAB操作命令大全1.基本操作- help:查看函数的帮助文档。
- save:将变量保存到文件中。
- load:从文件中加载变量。
- clear:清除当前工作空间中的变量。
- who:列出当前工作空间中的变量。
- whos:显示当前工作空间中变量的详细信息。
- quit:退出MATLAB。
2.变量操作-=:赋值操作,将值赋给变量。
- disp:显示变量的值。
- length:返回数组的长度。
- size:返回数组的大小。
- max:返回数组的最大值。
- min:返回数组的最小值。
- sum:返回数组元素的和。
3.数学操作-+:加法操作,将两个数值相加。
--:减法操作,将两个数值相减。
-*:乘法操作,将两个数值相乘。
-/:除法操作,将两个数值相除。
-^:指数操作,将一个数值提高到指定次幂。
- sqrt:返回一个数值的平方根。
- abs:返回一个数值的绝对值。
4.矩阵操作- eye:创建一个单位矩阵。
- zeros:创建一个全0矩阵。
- ones:创建一个全1矩阵。
- rand:创建一个0到1之间的随机矩阵。
- diag:返回对角线元素。
- inv:返回矩阵的逆矩阵。
- det:返回矩阵的行列式。
5.图形操作- plot:绘制二维线图。
- scatter:绘制散点图。
- bar:绘制柱状图。
- hist:绘制直方图。
- surf:绘制三维曲面图。
- contour:绘制等高线图。
- imagesc:绘制矩阵的颜色图。
6.控制流程操作- if:用于条件判断。
- for:用于循环操作。
- while:用于循环操作。
- switch:用于多条件判断。
- break:跳出循环。
- continue:跳过当前循环,并继续执行下一次循环。
7.文件操作- fopen:打开文件。
- fclose:关闭文件。
- fprintf:将数据写入文件。
- fscanf:从文件中读取数据。
- fseek:设置文件指针的位置。
RoboticsToolbox_电子版说明文档

2 机器人运动学
逆向运动学求解:
例2.7:
21
右手
左手
存在多解,可通过option参数选取期望解
2 机器人运动学
22
逆向运动学求解:
例2.8:
右手、肘在上
例2.9:
无解
2 机器人运动学
雅可比矩阵:
例2.10:
23
参考 的雅可比矩阵 参考 的雅可比矩阵
参考坐标系: 参考坐标系:
本课内容
24
Matlab Robotics Toolbox
机器人学基础
Robotics Toolbox
本课内容
2
Matlab Robotics Toolbox
1. 三维位姿描述 2. 机器人运动学 3. 机器人轨迹规划 4. 机器人动力学
1 三维位姿描述
3
三维旋转基本表示
绕 轴旋转theta的旋转矩阵 绕 轴旋转theta的旋转矩阵 绕 轴旋转theta的旋转矩阵 在图中绘制旋转矩阵 旋转矩阵 描述的旋转动画
1 三维位姿描述 三维旋转基本表示
例1.1
4
默认弧度,后缀deg表示角度; 先绕x转30,后绕新z轴转60,即
相对于动坐标系(右乘关系)
R1旋转坐标系标注为1, 用蓝色画出
R2旋转坐标系标注为2, 用红色画出
旋转顺序不可变
1 三维位姿描述
5
欧拉旋转(相对于动坐标系)
Robotics Toolbox中定义欧拉角旋转顺序为Z-Y-Z,即: 初始{B}与{A}重合,先绕 转 、再绕 转 、最后绕 转
给定位姿、速度和加速度,计算所需关节力或力矩 (逆动力学)
4 机器人动力学
逆向动力学
例4.1:
(学习笔记)matlab机器人工具箱攻略

(学习笔记)matlab机器人工具箱攻略一.旋转矩阵:(1)基本R = rotx(pi/2)R = roty(pi/2)R = rotz(pi/2)分别对X Y Z轴生成3*3的旋转矩阵R = rotx(30, 'deg')R = roty(30, 'deg')R = rotz(30, 'deg')可以改变输入的方式(2)姿态的叙述方法:1.Y-Z-Y欧拉角R = rotz(a)*roty(b)*rotz(c)eul2r(a,b,c)旋转矩阵反解出y-z-y欧拉角度的函数为tr2eul(R)2.x-y-z欧拉角R = rotx(r)*roty(p)*rotz(y)rpy2r(r,p,y)旋转矩阵反解出x-y-z欧拉角度的函数为tr2rpy(R)3.等效轴角坐标表示法把坐标系b看做原坐标a按向量V方向按右手方向旋转theta度旋转矩阵反解出等效轴角坐标表示的函数为[theta,V] = tr2angvec(R)由等效轴角坐标表示转换为旋转矩阵的函数R = angvec2r(theta, V)(记得把v做单位化的处理v = v / norm(v))4.欧拉参数法表示(4元数)在等效轴角坐标表示法的基础上更进一步E1=Kx*sin(θ/2);E2=Ky*sin(θ/2);E3=Kz*sin (θ/2);E4=cos(θ/2);求解4元数的函数为Quaternion(R)二.齐次变换矩阵4*4矩阵用于描述坐标系的位置和姿态1.平移算子transl(x, y, z)2.旋转算子trotx(pi/2);troty(pi/2);trotz(pi/2)3.各种表示下齐次矩阵的求解rpy2tr(roll, pitch, yaw, options) 求解x-y-z欧拉角变化对应的齐次矩阵 options:’deg’或不填angvec2tr(theta, V)求解等效轴角坐标表示的齐次矩阵eul2tr(phi, theta, psi, options)反解出Y-Z-Y欧拉角 options:’deg’或不填同样可以用tr2eul(t)反解出Y-Z-Y欧拉角tr2rpy(t)反解出x-y-z欧拉角[theta,vec] = tr2angvec(R);反解等效轴角坐标表示Quaternion(R) 反解4元数表示4.求出姿态的相关表示trprint(T, OPTIONS)可以表示出齐次矩阵的参数Options为:(1)'rpy' ; 'euler' ;'angvec' ;改变转换的方式为rpy,欧拉角,等效轴角坐标(2)'radian' ;改变显示的方式,和‘deg’功能相对。
matlab机械臂路径球
在MATLAB中,可以使用Robotics System Toolbox来控制机械臂运动。
以下是一个基本的示例代码,演示如何使用路径球来规划机械臂的轨迹:```matlab创建机械臂模型robot = robotics.RigidBodyTree;定义机械臂关节参数L1 = 0.4;L2 = 0.3;L3 = 0.2;添加机械臂关节body1 = robotics.RigidBody('link1');joint1 = robotics.Joint('joint1', 'revolute');setFixedTransform(joint1,trvec2tform([0 0 0]));joint1.JointAxis = [0 0 1];body1.Joint = joint1;addBody(robot, body1, 'base');body2 = robotics.RigidBody('link2');joint2 = robotics.Joint('joint2','revolute');setFixedTransform(joint2, trvec2tform([L1, 0, 0]));joint2.JointAxis = [0 1 0];body2.Joint = joint2;addBody(robot, body2, 'link1');body3 = robotics.RigidBody('link3');joint3 = robotics.Joint('joint3','revolute');setFixedTransform(joint3, trvec2tform([L2, 0, 0]));joint3.JointAxis = [0 1 0];body3.Joint = joint3;addBody(robot, body3, 'link2');body4 = robotics.RigidBody('link4');joint4 = robotics.Joint('joint4','revolute');setFixedTransform(joint4, trvec2tform([L3, 0, 0]));joint4.JointAxis = [0 1 0];body4.Joint = joint4;addBody(robot, body4, 'link3');创建路径球ballCenter = [0.6, 0, 0];ballRadius = 0.3;ball = robotics.RigidBodySphere(ballRadius);setFixedTransform(ball, trvec2tform(ballCenter));定义规划器planner = robotics.PRM;planner.NumNodes = 50;planner.ConnectionDistance = 0.2;规划路径startConfig = [pi/2 pi/2 pi/2 0];endConfig = [-pi/2 -pi/2 -pi/2 0];path = plan(planner, robot, startConfig, endConfig);显示路径figure;show(robot, path);hold on;plot(ball, 'FaceColor', 'blue', 'FaceAlpha', 0.5);```该代码创建了一个机械臂模型,并使用路径球来规划机械臂的轨迹。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用MATLAB中Robotics Toolbox工具箱中的transl、rotx、roty和rotz可以实现用齐次变换矩阵表示平移变换和旋转变换。
下面举例来说明:
A 机器人在x轴方向平移了0.5米,那么我们可以用下面的方法来求取平移变换后的齐次矩阵:
>> transl(0.5,0,0)
ans =
1.0000 0 0 0.5000
0 1.0000 0 0
0 0 1.0000 0
0 0 0 1.0000
B 机器人绕x轴旋转45度,那么可以用rotx来求取旋转后的齐次矩阵:
>> rotx(pi/4)
ans =
1.0000 0 0 0
0 0.7071 -0.7071 0
0 0.7071 0.7071 0
0 0 0 1.0000
C 机器人绕y轴旋转90度,那么可以用roty来求取旋转后的齐次矩阵:
>> roty(pi/2)
ans =
0.0000 0 1.0000 0
0 1.0000 0 0
-1.0000 0 0.0000 0
0 0 0 1.0000
D 机器人绕z轴旋转-90度,那么可以用rotz来求取旋转后的齐次矩阵:
>> rotz(-pi/2)
ans =
0.0000 1.0000 0 0
-1.0000 0.0000 0 0
0 0 1.0000 0
0 0 0 1.0000
当然,如果有多次旋转和平移变换,我们只需要多次调用函数在组合就可以了。
另外,可以和我们学习的平移矩阵和旋转矩阵做个对比,相信是一致的。
3 轨迹规划
利用Robotics Toolbox提供的ctraj、jtraj和trinterp函数可以实现笛卡尔规划、关节空间规划和变换插值。
其中ctraj函数的调用格式:
TC = CTRAJ(T0, T1, N)
TC = CTRAJ(T0, T1, R)
参数TC为从T0到T1的笛卡尔规划轨迹,N为点的数量,R为给定路径距离向量,R的每个值必须在0到1之间。
其中jtraj函数的调用格式:
[Q QD QDD] = JTRAJ(Q0, Q1, N)
[Q QD QDD] = JTRAJ(Q0, Q1, N, QD0, QD1)
[Q QD QDD] = JTRAJ(Q0, Q1, T)
[Q QD QDD] = JTRAJ(Q0, Q1, T, QD0, QD1)
参数Q为从状态Q0到Q1的关节空间规划轨迹,N为规划的点数,T为给定的时间向量的长度,速度非零边界可以用QD0和QD1来指定。
QD和QDD 为返回的规划轨迹的速度和加速度。
其中trinterp函数的调用格式:
TR = TRINTERP(T0, T1, R)
参数TR为在T0和T1之间的坐标变化插值,R需在0和1之间。
要实现轨迹规划,首先我们要创建一个时间向量,假设在两秒内完成某个动作,采样间隔是56ms,那么可以用如下的命令来实现多项式轨迹规划:t=0:0.056:2; [q,qd,qdd]=jtraj(qz,qr,t);
其中t为时间向量,qz为机器人的初始位姿,qr为机器人的最终位姿,q为经过的路径点,qd为运动的速度,qdd为运动的加速度。
其中q、qd、qdd都是六列的矩阵,每列代表每个关节的位置、速度和加速度。
如q(:,3)代表关节3的位置,qd(:,3)代表关节3的速度,qdd(:,3)代表关节3的加速度。
4 运动学的正问题
利用Robotics Toolbox中的fkine函数可以实现机器人运动学正问题的求解。
其中fkine函数的调用格式:
TR = FKINE(ROBOT, Q)
参数ROBOT为一个机器人对象,TR为由Q定义的每个前向运动学的正解。
以PUMA560为例,定义关节坐标系的零点qz=[0 0 0 0 0 0],那么fkine(p560,qz)将返回最后一个关节的平移的齐次变换矩阵。
如果有了关节的轨迹规划之后,我们也可以用fkine来进行运动学的正解。
比如:
t=0:0.056:2; q=jtraj(qz,qr,t); T=fkine(p560,q);
返回的矩阵T是一个三维的矩阵,前两维是4×4的矩阵代表坐标变化,第三维是时间。
5 运动学的逆问题
利用Robotics Toolbox中的ikine函数可以实现机器人运动学逆问题的求解。
其中ikine函数的调用格式:
Q = IKINE(ROBOT, T)
Q = IKINE(ROBOT, T, Q)
Q = IKINE(ROBOT, T, Q, M)
参数ROBOT为一个机器人对象,Q为初始猜测点(默认为0),T为要反解的变换矩阵。
当反解的机器人对象的自由度少于6时,要用M进行忽略某个关节自由度。
有了关节的轨迹规划之后,我们也可以用ikine函数来进行运动学逆问题的求解。
比如:
t=0:0.056:2; T1=transl(0.6,-0.5,0); T2=transl(0.4,0.5,0.2); T=ctraj(T1,T2,length(t));
q=ikine(p560,T);
我们也可以尝试先进行正解,再进行逆解,看看能否还原。
Q=[0 –pi/4 –pi/4 0 pi/8 0]; T=fkine(p560,q); qi=ikine(p560,T);
6 动画演示
有了机器人的轨迹规划之后,我们就可以利用Robotics Toolbox中的plot函数来实现对规划路径的仿真。
puma560;T=0:0.056:2; q=jtraj(qz,qr,T); plot(p560,q);
当然,我们也可以来调节PUMA560的六个旋转角,来实现动画演示。
drivebot(p560)。