第四节 杠杆
第四节 杠杆收购

怎么解决?
1、用软实力抵消“被四化” 长期从事企业研究的察哈尔学会高级研究 员欧阳君山认为,跨国企业要提高软实力, 还应该在走出去的过程中,尽量淡化政府 背景,更好地利用行业协会和民间非政府 组织(NGO)来协调事务,这样更有利于 西方社会接受。
2、以平常心面对“不公” 面对“被四化”,有些企业愤然,有些企业泰 然。 2010年,试图收购美国《新闻周刊》受挫的 南方报业集团属于后者。 “我们不认为那是一次失败,事实上,我们连 付学费都算不上。”南方报业集团董事长杨兴 锋在公共外交论坛上接受《国际先驱导报》采 访时指出,收购不成的主要原因不在己方,海 外市场也不全是按照市场规则来办的。
中国企业海外ቤተ መጻሕፍቲ ባይዱ购
动力一:占领市场,如联想并购IBM的 PC业务 动力二:能源和资源的战略考虑,如中 海油 动力三:获得核心技术。吉利并购沃尔 沃。
中国企业海外并购被“四化”
“两家工厂的180名工人都在为重庆市国有资 产监督管理委员会下属的庞大商业帝国效力。 重庆国资委是中国最大的国有控股企业。”在 这则报道中,中国企业被描绘成商业帝国,企 业成为演绎国家性质的代名词。 “中国在海外企业收购方面也许一度拥有谨慎 的名声,但中国已不再惧怕向棘手的经济或政 治地盘进军。”在这篇评论的字里行间,中国 企业的决策被政治化了。
第四节 杠杆收购
一、杠杆收购(LBO)
杠杆收购是企业兼并的一种特殊形式,其实质在于举债收 购,即收购方以目标公司的资产做抵押,运用财务杠杆加 大负债比例,以较少的股本投入(约占10%)融得数倍 的资金,收购成功,使其产生较高盈利能力后,再俟机出 售的一种资本运作方式。LBO主要分为管理层收购 (MBO)和机构收购(IBO)两类。
第四节 杠杆
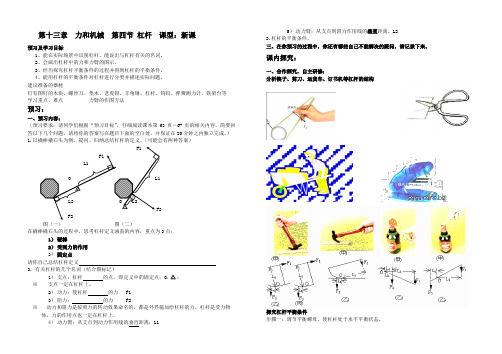
第十三章 力和机械 第四节 杠杆 课型:新课预习及学习目标1、能在实际场景中识别杠杆、能说出与杠杆有关的名词。
2、会画出杠杆中的力和力臂的图示。
3、经历探究杠杆平衡条件的过程并得到杠杆的平衡条件。
4、能用杠杆的平衡条件对杠杆进行分类并描述实际问题。
建议准备的器材钉有图钉的木块、螺丝刀、垫木、老虎钳、羊角锤、杠杆、钩码、弹簧测力计、铁架台等 学习重点、难点 力臂的作图方法预习:一、预习内容:(预习要求:请同学们根据“预习目标”,仔细阅读课本第63页-67页的相关内容,简要回答以下几个问题,请将你的答案写在题目下面的空白处,并保证在20分钟之内独立完成。
) 1.以撬棒撬石头为例,提问、归纳总结杠杆的定义。
(可能会有两种答案)图(一) 图(二)在撬棒撬石头的过程中,思考杠杆定义涵盖的内容,重点为3点:1) 硬棒2) 受到力的作用 3) 固定点请你自己总结杠杆定义 2. 有关杠杆的几个名词(结合图标记)1) 支点:杠杆 的点,即定义中的固定点;O ;※ 支点一定在杠杆上。
2) 动力:使杠杆 的力 F1 3) 阻力: 的力 F2※ 动力和阻力是按照力的转动效果命名的,都是外界施加给杠杆的力,杠杆是受力物体,力的作用点也一定在杠杆上。
4) 动力臂:从支点到动力作用线的垂直距离;L1 5) 动力臂:从支点到阻力作用线的垂直距离。
L23.杠杆的平衡条件。
三、在你预习的过程中,你还有哪些自己不能解决的疑问,请记录下来。
课内探究:一、合作探究,自主研修:分析筷子、剪刀、运货车、订书机等杠杆的结构探究杠杆平衡条件步骤一:调节平衡螺母,使杠杆处于水平平衡状态。
(注意:实验过程中不再调节平衡螺母)步骤二:选定钩码和弹簧测力计的位置,改变钩码的数目,观察弹簧测力计的示数变化。
读出一组数据记入表格中。
实验小结1:动力臂、阻力臂不变,增大阻力,则动力。
步骤三:保证钩码的数量和位置不变,改变弹簧测力计的位置,弹簧测力计的示数有何种变化?读出一组数据记入表格中。
第三章第四节简单机械-《杠杆》教学设计浙教版九年级科学上册
3.4简单机械-《杠杆》教学设计---浙教版九年级科学上一、学习目标:1、能通过观察生活和生产劳动中的各种杠杆提取出共同的特征,并能在杠杆上确认动力、阻力、支点、动力臂、阻力臂。
2、根据日常经验,通过参与科学探究活动,能对杠杆平衡条件进行猜想与假设,并设计出验证方案,对获得的信息进行处理,得出并记住杠杆的平衡条件。
3、针对杠杆的不同特点进行分类,并识别生产和生活中的三类杠杆。
二、教学重点:探究杠杆的平衡条件的实验和结论。
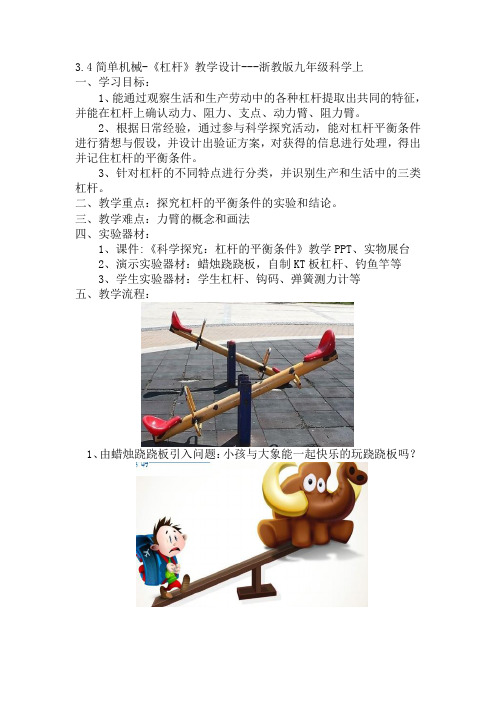
三、教学难点:力臂的概念和画法四、实验器材:1、课件:《科学探究:杠杆的平衡条件》教学PPT、实物展台2、演示实验器材:蜡烛跷跷板,自制KT板杠杆、钓鱼竿等3、学生实验器材:学生杠杆、钩码、弹簧测力计等五、教学流程:1、由蜡烛跷跷板引入问题:小孩与大象能一起快乐的玩跷跷板吗?2、引入杠杆,介绍古代杠杆的应用(舂、桔槔),引起文化认同。
3、由问题一引入亲手实践:一根硬棒怎样变成杠杆?(在研究之前,先用一用,感受一下)提水桶------用撬棒提水桶(无支点)-----找一个支点提水桶(总结出何为杠杆,学生列举几种身边的杠杆,老师列举几种)。
-----------找一下杠杆上的几个要素(支点、动力、阻力)4、继续上述实践:怎样更轻松的提起水桶呢?--------通过增加长度的方法等(在此处,当学生点出此点来之后,在长度不变的情况下,改变用力的方向,让学生产生困惑,然后引入力臂的概念,引起学生的认知感)-----------利用自制KT板杠杆,结合数学中点到点、点到线进行区分(暂时不强化)----认识杠杆的五要素,并实际画一下。
5、杠杆的平衡:针对刚才用杠杆提水桶的现象,你能提出一个有价值并且易于探究的物理问题吗?(学生说几个,给出自己的见解)----------在阻力和阻力臂一定的条件下,杠杆平衡时,动力和动力臂需要满足什么关系?重复重难点:在阻力和阻力臂一定的前提下,杠杆平衡时,动力和动力臂需要满足什么条件?(学生实验一:在杠杆水平平衡时,一侧20cm处挂两个钩码,另一侧不同位置用测力计,同时记录两个数值)---------交流:(1)为什么要水平平衡,这样做有什么好处?(2)测力计怎么拉动?-----分析归纳结论。
精选初中物理杠杆教案(优秀4篇)
精选初中物理杠杆教案(优秀4篇)杠杆教学设计教案篇一【教材分析】人民教育出版社九年级物理第十三章的内容是力和机械。
第四节“杠杆”具有以下特点:一是实用性,杠杆在生产、生活中的应用非常广泛,它源于生活,服务社会,充分体现了“从生活走向物理,从物理走向社会”这一理念。
二是探究性,杠杆平衡条件要求学生在老师的引导下,通过小组合作探究得出f1×l1=f2×l2这一结论。
三是基础性,这一节是学习滑轮和其他机械以及机械效率的重要基础。
本节内容设计如下。
【教学目标】一、知识与技能1、认识杠杆,知道杠杆的几个概念,会确认并画出力臂;2、知道杠杆平衡条件;3、了解杠杆的一些应用。
二、过程与方法1、通过观察和实验,了解杠杆中的几个概念。
2、经历探究杠杆平衡条件的过程,进一步学会提出问题,分析归纳实验数据。
三、情感、态度与价值观1、关心社会生产、生活,保持对自然现象的好奇心,并乐于探索自然现象和日常生活中的物理学道理。
2、逐步建立辩证唯物主义的世界观。
【教学重难点】重点:引导学生通过探究得出杠杆平衡条件。
难点:1、通过实验,理解力臂概念。
2、杠杆平衡条件的运用。
【实验器材及教学媒体的选择与使用】铁架台,木棍,砖块,绳子,弹簧测力计,钩码,杠杆原理演示器(教材图13.4-5),三角板,多媒体设备等。
【教学过程】一、创设情景,引入新课1、用古埃及人搬运巨石修建金字塔的故事导入;2、出示砖块、铁架台、木棍、细绳等,请同学上台模拟古埃及人搬运巨石修建金字塔的情景,调动学生激情。
二、认识杠杆用同学上台模拟古埃及人搬运巨石的实物,介绍支点o、动力f1、动力臂l1、阻力f2、阻力臂l2(如下图)。
三、探究:杠杆平衡条件1、用上图实物,演示并讲解什么叫杠杆平衡。
2、提出问题:如果将支点右移,观察l1、l2如何变化?f1又会如何变化?反之,又会怎样变化呢?(学生凭经验应该说能回答正确)。
3、探究:杠杆平衡条件(1)参照教材图13.4-5,引导学生思考:为什么要使杠杆在水平位置平衡?(2)为什么要改变几次钩码重和位置(f1、f2以及l1、l2)?(3)分组合作探究,教师巡回指导。
第三章第四节简单机械--杠杆教学设计浙教版九年级科学上册
3.4简单机械--杠杆教学设计---2021-2022学年度浙教版九年级科学上一、课标要求与教材分析(一)课标要求:知道简单机械,通过实验探究并了解杠杆的平衡条件对科学探究能力的要求:1、知道什么是杠杆,能从常见的工具中把杠杆识别出来。
2、通过实验探究并了解杠杆的平衡条件,能在杠杆上确定杠杆的五要素。
3、能用杠杆的平衡条件分析并解决实际问题。
(二)教材分析:这节课是在学生已有力学知识的基础上,进一步了解一些简单机械及应用。
这既符合学生的认知规律由易到难,由简到繁;同时又保持知识的结构性和系统性。
本节课内容包括:什么是杠杆?杠杆的五要素,研究杠杆的平衡条件。
其中理解力臂的概念并画出力臂,实验探究杠杆的平衡条件是本节课的主要内容。
教材把实验和结论紧密结合起来,加深了学生对知识的理解,为学生学习杠杆的应用及变形杠杆打下了基础。
(二)教学重点1.通过杠杆的生活实例指出杠杆的五要素;2.通过实验探究总结出杠杆的平衡条件;教学难点1.准确找出力臂;2.设计实验探究杠杆的平衡条件;3.应用杠杆的平衡条件解释实例二、学情分析对于初三的学生来说,具备一定的生活实践,并从生活实践中总结出一定的感性知识,且初步掌握了一定的科学知识和基本的技能,对生活中的很多例子都能知道,并能正确的使用部分简单机械,但他们对它们的原理并不甚了解,所以,在教学中,从生活常见的实例入手,概括杠杆的共同点。
考虑到学生对力臂理解有一定困难,可首先回顾点到直线的距离,能够将动力臂与点到线的距离联系起来,并比较力臂的大小;对实验探究问题理解起来有一定的难度,因此,对学生进行适当的引导,同时应组织学生团结合作,共同克服困难,共同完成探究活动。
三、教学目标(一)基本知识、技能目标1、知道杠杆的五要素,能识别杠杆。
2、得出杠杆的平衡条件,分析解决简单实际的问题。
(二)方法目标(认知策略)1、过科学探究,得出杠杆的平衡条件。
2、用杠杆的知识来解决一些实际问题。
第十三章第四节杠杆
初中物理《杠杆》导学案【学习目标】1.认识杠杆,知道杠杆的五要素。
2.知道杠杆的平衡条件及其杠杆的一些应用。
【重点、难点】1.重点:杠杆的五要素画力臂探究杠杆的平衡条件2.难点:把实物抽象成杠杆理解力臂的概念【器材准备】钩码、杠杆、弹簧测力计、铁架台。
课前预习学案【自主预习】认真阅读课本,找出本节重点写下来:【预习自测】1、在力的作用下能够饶着转动的叫杠杆。
2、杠杆绕着转动的固定点叫用字母表示。
3、使杠杆转动的力叫用字母表示。
4、阻碍杠杆转动的力叫用字母表示。
5、支点到动力作用线的距离叫用字母表示。
6、支点到阻力作用线的距离叫用字母表示。
7、杠杆可以分为三类:一是杠杆:这类杠杆的比长,它能省,却费。
我知道的这类杠杆有。
二是杠杆:这类杠杆的比短,它能省,却费。
我知道的这类杠杆有。
三是杠杆:这类杠杆的和相等,它不能省,也不费。
这类杠杆的主要代表是。
杠杆的平衡条件是。
我的疑问:【课内探究学案】(一)交流预习情况(二)课内探究『课内探究一』认识杠杆观察教材P64图13.4-4所示的几种工具。
想一想,它们有什么共同的特点?1、定义:在力的作用下能够饶着转动的叫杠杆。
2、五要素:支点指;动力是;阻力是杠杆转动的力;动力臂是到的距离;阻力臂是到的距离。
3、作出下列几个杠杆的力臂『课内探究二』杠杆的平衡条件:1、小组讨论:天平、杆秤都是我们熟悉的杠杆,它们在使用时都要达到平衡才行,当杠杆处于状态时,我们就说杠杆平衡了。
2、猜一猜:回忆一下杆秤的使用情况,杠杆平衡的条件是什么?3、自主探究:学生自学课本实验步骤分组进行实验。
(1)想一想:让杠杆在水平位置平衡是为了(2)将实验数据记录课本65页表格中4、我的结论:『课内探究三』杠杆的应用1、自主学习:学生自学课本第66页杠杆的应用部分,并把前面接触到的杠杆分类。
杠杆可以分为三类:一是杠杆:这类杠杆的比长,它能省,却费。
我知道的这类杠杆有。
二是杠杆:这类杠杆的比短,它能省,却费。
杠杆PPT课件(人教版)
阻力臂l2/m
0.1 0.04 0.2
④ 求出各次实验中动力×动力臂和阻力×阻 力臂的值,然后思考杠杆的平衡条件。
实验 动力 动力臂 动力动力臂 阻力
次数 F1/N l1/m
F2/N
1 2 0.15
0.3
3
2 5 0.08
0.4
10
3 10 0.1
ห้องสมุดไป่ตู้
1
5
阻力臂 阻力阻力臂
l2/m
0.1
0.3
0.04
例4: 在杠杆的A端施加力翻转石 头,如图6甲所示,作出最小动力.
例5:作用在杠杆一端且始终竖直向上的力F,将杠杆缓慢 地由位置A拉至位置B,在这个过程中,力F( ) A.不变 B.变大 C.变小 D.先变大后变小
解:如图,当杠杆匀速转动到水平位置时, ∵动力、阻力作用点不变,∴ 不变;又∵阻力(物重G不 变), ∴由FLOB=GLOA得: . ∴当杠杆匀速转动到水平位置时,动力F的大小不变
例6:如图所示.作用在杠杆一端且始终与杠杆垂直的力F, 将杠杆缓慢地由位置A拉至位置B,在这个过程中的动力
F( ) A 变大 B 变小 C 不变 D 先变大后变小
有关杠杆的 几个名词
F1
支点
O
动
力
L1
动力臂
阻力臂
L2
阻 力 F2
1支点O:杠杆绕转动的点。
2动力F1:使杠杆转动的力。
3阻力F2:阻碍杠杆转动的力。
4动力臂L1:从支点到动力作用线的 距离。
5动力臂L2:从支点到阻力作用线的
距离。
(朗读2遍)
力臂的作法
1.找出支点O 2.沿力的方向作出力的作用线 3.从支点向力的作用线作垂线段,并标出符号。
九年级物理 第十三章 第4-5节 杠杆 其他简单机械知识精讲 人教新课标版
初三物理第十三章第4-5节杠杆其他简单机械人教新课标版一、学习目标:1. 能识别生活中的杠杆;能分析杠杆受到的动力和阻力;会画杠杆的力臂。
2. 能利用杠杆的平衡条件进行分析和判断。
3. 能对生活中的杠杆进行分类。
4. 能说出动滑轮和定滑轮的特点。
5. 能利用动滑轮和定滑轮的特点解决实际问题。
二、重点、难点:重点:1. 杠杆以及杠杆的支点、动力、动力臂、阻力、阻力臂的意义;杠杆的平衡条件;2. 定滑轮、动滑轮和滑轮组的特点;根据需要选择简单的滑轮组;3. 知道轮轴和斜面也能省力。
难点:力臂的概念及力臂的画法。
三、考点分析:1. 发现和识别生活中的杠杆,按要求画力和力臂;利用杠杆的平衡条件解决实际问题。
题目类型主要是填空题、选择题、作图题。
2. 动、定滑轮类型的判断及省力特点;滑轮组的绕线方法的作图问题;滑轮组中各相关量的计算;滑轮组的一些实际应用性问题。
题型主要以选择题、填空题、作图题为主。
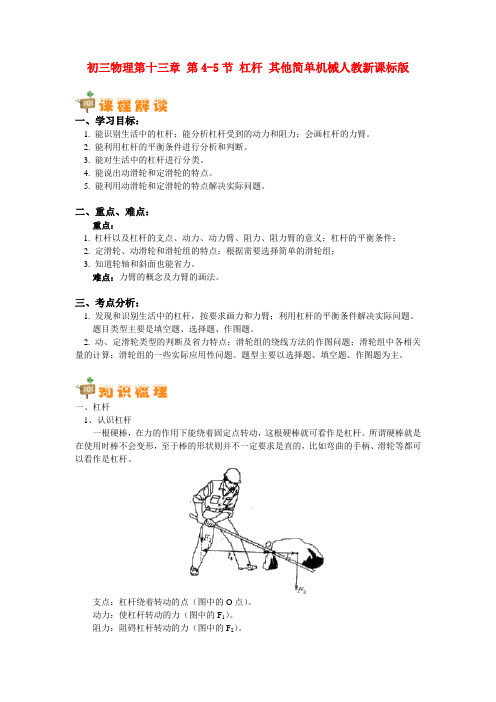
一、杠杆1、认识杠杆一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就可看作是杠杆。
所谓硬棒就是在使用时棒不会变形,至于棒的形状则并不一定要求是直的,比如弯曲的手柄、滑轮等都可以看作是杠杆。
支点:杠杆绕着转动的点(图中的O点)。
动力:使杠杆转动的力(图中的F1)。
阻力:阻碍杠杆转动的力(图中的F2)。
动力臂:从支点到动力作用线的距离(图中的l1)。
阻力臂:从支点到阻力作用线的距离(图中的l2)。
2、杠杆的平衡条件在力的作用下,如果杠杆处于静止状态(或绕支点匀速转动),就表明杠杆平衡了,杠杆的平衡条件是:动力×动力臂=阻力×阻力臂,或写作F1l1=F2l2.二、动滑轮、定滑轮、滑轮组、斜面1、定滑轮:轴固定不动,使用定滑轮不能省力,也不能省距离,但可以改变用力的方向,定滑轮实质上是一个等臂杠杆。
所用拉力都等于物重。
2、动滑轮:随物体一起移动,使用动滑轮可以省一半力(即用一半力),但要多费1倍的距离,且不能改变用力的方向(此方向是指物体运动的方向)。
第十三章第四节杠杆教案

O F1 F2 3、做书图 13、4---5 实验让学生做好记录并填入课本上 、 、 的表格中 4、分析表格中记录的数据,你能得出什么结论? 、分析表格中记录的数据,你能得出什么结论?
5、杠杆的平衡条件是(公式 : 、杠杆的平衡条件是 公式 公式): 公式中 F1 表示 L1 表示 、F2 表示 、L2 表示 .
当堂检测
完成当堂检测的内容
教学重点 教学难点 教具准备 课时安排 教学过程 知识回顾 交流展示 师生探究
力臂的概念; 力臂的概念;杠杆的平衡条件 力臂的画法; 力臂的画法;杠杆平衡条件的得出过程 演示杠杆、 演示杠杆、钩码等 1 课时 反思与收获 1、 力的作用效果有哪些? 、 力的作用效果有哪些? 1、完成学案的内容 、 2、仔细观察图 13、4—4 指出图中的工具有那些共同的 、 、 — 特点。教师再模拟撬石头让学生观察后回答: 特点。教师再模拟撬石头让学生观察后回答: 杠杆: 杠杆: 支点: 支点: 动力: 动力: 阻力: 阻力: 动力臂: 动力臂: 阻力臂: 阻力臂: 列举生活中的实例进一步说明杠杆,并分析它的五要素。 列举生活中的实例进一步说明杠杆,并分析它的五要素。 的实例进一步说明杠杆 例题分析:教师以撬石头为例分析杠杆的五要素和 例题分析:教师以撬石头为例分析杠杆的五要素和 撬石头 力臂的画法: 力臂的画法:
(3)图乙中杠杆水平平衡后,在杠杆左右两边钩码 图乙中杠杆水平平衡后, 下同时加一个相同的钩码, 这时杠杆将 下同时加一个相同的钩码, 、 ) “保持水平平衡”“顺时针转动”或“逆时针转动” 保持水平平衡” 顺时针转动” 逆时针转动” (4)如图丙所示的案秤是个不等臂杠杆,请你根据 如图丙所示的案秤是个不等臂杠杆, 杠杆的平衡条件, 杠杆的平衡条件, 说明用几个不重的砝码就能平衡 盘中重得多的货物的道理 总结提高 。
九年级物理全册 第十三章 第四节 杠杆学案(无答案) 新人教版
第四节杠杆学习目标:1、知识和技能知道什么是杠杆,能从常见的工具中辨认出杠杆。
知道有关杠杆的一些名词术语,理解力臂的概念,会画杠杆的力臂。
理解杠杆的平衡条件,并能用来解决简单的问题。
2、过程和方法通过观察和实验,了解杠杆的结构通过探究,了解杠杆平衡条件。
3、情感、态度、价值观通过了解杠杆的应用,进一步认识物理是有用的,提高学习物理的兴趣。
重、难点杠杆的力臂作图和通过探究,了解杠杆的平衡条件杠杆作图,画力臂以及利用杠杆平衡条件解决简单问题。
器材杠杆平衡条件教具和学具、剪刀、钳子、撬棒以及学生自备杠杆。
课时 2课时一、课前预习:(在书上找到以下定义把它们画下来并记下)1、什么是杠杆?2、杠杆五要素有哪些?3、杠杆平衡条件是什么:4、有哪些种类的杠杆:二、课前展示:(通过自学,试试下面这些问题你能解决吗?)在生活中你用过哪些杠杆,你了解哪些杠杆,请把它们写下来,比比看谁能写的更多。
三、创设情景:给我一个立足点和一根足够长的棍,我就可以翘起地球。
这句话大家并不陌生,这是古希腊的物理学家阿基米德的一句名言,这种想法究竟可行吗,希望通过今天我们对杠杆的研究,大家来分析阿基米德的这句话从物理角度看可行吗。
四、自主学习,合作探究。
五、展示汇报:1、在能绕着转动的硬棒就是杠杆。
图2 图3 图4图5 图6 图7图9图82、杠杆的五要素支点:杠杆 的点,即定义中的固定点,用字母_________表示;动力:使 的力;用字母_________表示; 阻力: 的力;用字母_________表示;图10图11支点OF l 1l 2F 2注释:动力和阻力是按照力的转动效果命名的,都是外界施加给杠杆的力,杠杆是受力物体,力的作用点也一定在杠杆上。
动力臂:从支点到的垂直距离,用字母_________表示;动力臂:从支点到的垂直距离。
用字母_________表示。
注意:1)力臂是支点到垂足的距离,不是支点到作用点的距离,因此力臂不一定在杠杆上。
新人教版物理九年级第十三章第四节杠杆典型习题

11、一学生用杠杆平衡的方法测量物重为G物的 固体的密度,杠杆本身的质量忽略不计。如 左图说是的杠杆平衡,量得右边的力臂为L1. 如右图将固体浸没于水中,移动钩码仍使杠 杆平衡,量得右边的力臂为L2,用测力计测得 钩码重为G,求:固体的密度是多少?
极值推理法
(变式题若增加)
如图5所示,将体积相同的物体G1、 G2分别挂在杠杆的两端,杠杆处于平衡 状态。若将两个物体G1、G2同时浸没在 水中,则 A.杠杆仍能保持平衡 B.杠杆不能平衡,A端下沉 C.杠杆不能平衡,B端下沉 D.无法确定杠杆的状态
图5
6、如图,一直杆可绕O点转动,杆下挂一重物, 为了提高重物,用一个始终跟直杆垂直的力 F将杠杆缓慢地由A位置拉至水平位置B,力F 的大小在这个过程中的变化情况是( ) A、变大 B、变小 C、不变 D、先变大后变小
9、如图,一直杆可绕O点转动,杆下挂一重物, 为了提高重物,用一个始终跟直杆垂直的力 F使直杆由竖直位置慢慢转动到水平位置。在 此过程中这个直杆:( ) A.始终是省力杠杆 B.始终是费力杠杆 C.先是省力杠杆,后是费力的杠杆 D.先是费力杠杆,后是省力的杠杆
O F
10、一架不准确的天平,主要是由于它横梁左右 两臂不等长。为了减少实验误差,在实验室 中常用“交换法”来测定物体的质量。即先将 被测物体放在左盘,当天平平衡时,右盘中 砝码的总质量为ml;再把被测物体放在右盘, 当天平平衡时,左盘中砝码的总质量为m2。 试证明被测物体的质量m= 。
1、下列关于杠杆的说法,正确的是( A、杠杆只可以是直的 B、杠杆一定有支点 C、杠杆的力臂一定在杠杆上 D、杠杆的长度等于动力臂和阻力臂
)
2、下列关于杠杆的说法,正确的是( ) A、杠杆的动力臂和阻力臂不可能在支点的同一侧 B、力臂等于零时,力的作用线将通过支点 C、费力杠杆对人们的生活没什么好处 D、等臂杠杆既不省力也不费力,所以它没有实际价值
第十三章.第四节 杠杆(二)
三类杠杆的特点(如下表),使用杠杆的好处是 省力 省距离 ____和____ . 分类 特 征 作 用 省力杠杆 F1<F2 动力臂大于阻臂 的杠杆 L1>L2 省了力但费了 距离 费力杠杆 F1>F2 等臂杠杆 F1=F2
动力臂小于阻力 动力臂等于阻力 臂的杠杆L1<L2 臂的杠杆L1=L2 费了力但省了 距离 镊子、理发剪刀 不省力不 费力 天平
讨论: A、B两图中的杠杆 都处于静止状态,实验时 采用哪幅图?为什么?
A
B
l1
·
O
便于读出力臂
F2
l2
F1
倾斜状态力臂比 杠杆上的刻度小
探究杠杆的平衡条件
实验步骤: (1).调节杠杆在水平位置平衡。 (2).在杠杆的左、右侧挂上适量的钩码, 使杠杆在水平位置平衡,记下钩码的重 量和钩码至支点的距离。 (3).改变钩码数量或位置,重复上面的步骤, 得出三组数据。
费力杠杆
F2 O F1
由 F1l1=F2l2
∵l1 < l2 ∴F1 > F2 这是费力杠杆
费力杠杆的特点
F1
O
B’ h
F2S=4h B F2
F1 A
A’
可见,费力杠杆虽然费了力,但可以省距离
等臂杠杆的特点
由 F1l1=F2l2 ∵l1 ∴F1
O
动力臂l1
= l2
= F2
F1
F2
这是等臂杠杆
等臂杠杆不省力,也不省距离
(4)进行实验与收集证据
实验次数
F1/N l1/m F1· F2/N l2/m F2· l1 l2
1
2
3
数据:
(5)结论:杠杆的平衡条件: 动力 X 动力臂=阻力 X 阻力臂
《杠杆》教学设计优秀6篇

《杠杆》教学设计优秀6篇【教学目标】1.知识与技能目标:认识杠杆,知道支点、动力、动力臂、阻力、阻力臂等概念。
2.过程与方法目标:通过观察和实验,了解杠杆的结构。
通过探究,了解杠杆的平衡条件。
3.情感、态度与价值观目标:通过学生的探究实验活动,加强学生之间的相互协作精神。
【教学重、难点】经历科学探究过程,归纳杠杆平衡条件。
【教学用具】1.学生自备的工具。
(剪刀、直尺、木棍等)2.分组实验器材:铁架台、杠杆、钩码等。
3.杆秤、水果、汽水瓶、多媒体、光盘等。
【教学过程】一、创设情境,导入新课问学生如何打开汽水瓶盖,激起学生的兴趣,引出“生活中使用的各种工具”的话题。
让学生展示自带的工具,说明它们的用途和好处。
教师利用多媒体进一步展示:生活中经常使用的工具(例如扳手、羊角锤、订书机等)。
教师提问:同学们在日常生活中见过大型机械吗?是否了解它们的用途?学生回答,教师予以鼓励,并利用多媒体展示:生产中常见的机械(如吊车、推土机、汽车、飞机、轮船等)。
介绍:我国古代就有了使用各种机械的先例。
指出,虽然当时的生产力水平低下,但勤劳的人民用自己的聪明才智制造的各种简单工具,改善了生产条件,方便了生活。
多媒体显示:古代天平、桔槔、舂在生活和生产中的使用情况。
教师总结并指出:生活和生产中的这些机械和工具实质上就是利用了“杠杆”的知识。
教师提问:为什么使用这些工具(杠杆)会给我们带来许多好处?由此导入新课。
二、新课教学探究杠杆的共同特征,认识杠杆:学生活动1 让学生观察桔槔(多媒体显示)。
学生活动2 学生观察教师用木棍撬重物的过程。
学生活动3 学生讨论。
通过讨论,说出它们的共同特征。
得到杠杆概念:在力的作用下,能绕其中一固定点转动的硬棒,叫杠杆。
学生活动4 找到上述桔槔、木棍撬重物的固定点。
学生活动5 教师利用多媒体展示:活塞式抽水机手柄压水画面,观察固定点。
学生活动6 教师让学生用杆秤称水果。
提问:杆秤是不是杠杆?它的固定点在哪里?并由此导入以下内容。
杠杆PPT课件(人教版)

它 们 都 是 杠 杆 , 有 什 么 共 同 特 点 ?
一、什么是杠杆?
• 1、定义:在力的作用下能绕固定点转 动的硬棒就是杠杆。
注意:硬棒可以是直,也可以是曲折的, 即硬棒可以是各种各样的形状.
撬棒在撬石 头的过程中 时怎么样运 动的?
什么是动力,什么是阻力
• 2、杠杆的五要素: 1 .支点(O):杠杆绕着转动的点。
2 .动力(F1) :使杠杆转动的力。
3 .阻力(F2) :阻碍杠杆转动的力。
4 .动力臂(L1) :从支点到动力作用线的距离。
5 .阻力臂(L2) :从支点到阻力作用线的距离。 a 力的作用线:通过力的作用点,沿力的方向所画的
一条直线。 b 距离:点到直线的垂线段的长度。
步骤2, 为什么在杠杆两边挂上不同数 量的钩码,调节钩码位置,使杠杆在水平 位置重新平衡?
答: 杠杆只有在水平位置平衡,量得支点到钩码的距离就是
力臂,此时杠杆如果不水平,则支点到钩码的距离就不是 力 臂。使杠杆在水平位置重新平衡,目的是从杠杆上的刻 度 值直接读出力臂的长度.
实验结论: 杠杆的平衡条件: 动力×动力臂=阻力×阻力臂 即:杠杆的平衡取决于力和力臂的 乘积.
(4)最后用大括号勾出力臂,并在旁边写上字母 L1或L2。
O F
BA
O
BA
.图2
.图1
• 【学习目标】
• 3.理解杠杆的平衡条件,能通过实验 探究总结出杠杆的平衡条件,会用杠 杆的平衡条件解题。
• 4.了解杠杆的应用,能对杠杆进行分 类,并了解分类原则。
二、杠杆平衡的条件
• 杠杆平衡:指杠杆静止不动或作缓慢 匀速转动时的状态。
杠杆示意图
18
第十八页,共20页。
三、杠杆 (gànggǎn)分
类
省力杠杆
由 F1L1=F2L2
F1
O
∵L1 〉L2
∴F1〈 F2
动力
阻力(zǔlì)
(dònglì) 臂L2
F2
臂L1
这是省力杠杆
可见,省力杠杆虽然省力,但费了距离
你知道的利用省力杠杆的机械有哪些?
练一练4:缝纫机的脚踏板杠杆 (gànggǎn)示意图
F2
O
F1
9
第九页,共20页。
练一练 5: 画出杠杆 (gànggǎn)示意图
剪刀 (jiǎndāo)
10
第十页,共20页。
练一练5 :剪刀(jiǎndāo)杠杆 示意图
L1
F1
L2 F2
11
第十一页,共20页。
作业 树剪杠杆(gànggǎn)
(zuòy 示意图
F2
è)1
F1
L1
L2
12
第十二页,共20页。
练一练6 : 画出杠杆 (gànggǎn)示意图
独轮车
13
第十三页,共20页。
练一练6 : 独轮车杠杆(gànggǎn)示意图
F
L独1 轮车 G L2 O
14
第十四页,共20页。
作业 (zuò yè)2
独轮车杠杆 (gànggǎn)示意图
o L2
F1
L1
第五页,共20页。
F2
5
2 (gànggǎn)
练 一 练
示 意 图
画 出 杠 杆
吸取(xīqǔ)式 抽水机
6
第六页,共20页。
人教版九年级第十二章第四节《杠杆》论文
人教版九年级第十二章第四节《杠杆》指导思想与理论依据:探究杠杆平衡这节内容,难点是学生对力臂概念的理解。
按照传统教学模式,先给出力臂再探究平衡条件,但是学生并不明白为什么要引入力臂,力臂为什么必须与力的作用线垂直。
本节课打破常规设计,按照学生思维发展来进行教学,先让学生探究力与杠杆垂直情况下即力臂在杠杆上的特殊情况,这使学生很容易得到杠杆的平衡条件f1s1=f2s2。
但是通过启发学生发现,当力与杠杆不垂直时,则该结论不成立,从而激起学生解决矛盾,重新探究的兴趣,再次实验后得出最终结论f1l1 = f2l2,并引出力臂的概念。
让学生真正学会探究,认识实验是不断探索、不断反思的过程。
教材分析:本节分两课时,第一课时是认识杠杆,探究杠杆的平衡条件,第二课时是杠杆的应用,我这节课是第一课时,重在探究。
本节课内容与生活联系非常紧密,跷跷板、剪指甲刀、剪刀、钳子、瓶起子、脚踩式垃圾桶、镊子、钓鱼竿等都是杠杆,学习本节是为了对生活中的物体和现象有一个更深的认识,明白其中的原理。
学情分析:学生对于生活中的杠杆,不能正确的找到支点、动力、阻力,因而力臂对于他们更是难点。
需要反复加强练习,巩固提高。
【教学目标】1.知识与技能:(1)能识别杠杆,正确找出支点、动力、阻力;(2)知道怎样画力臂,能够找出动力臂、阻力臂;(3)知道杠杆的平衡条件。
2.过程与方法:(1)能在探究中提出问题、进行合理猜想,并设计实验进行探究;(2)通过探究杠杆平衡条件的过程,体验科学研究的过程与方法;(3)学会收集数据、分析数据总结归纳科学规律。
3.情感、态度与价值观:(1)具有对科学的求知欲,勇于实验探究日常生活现象中的物理学规律;(2)在探究问题的过程中,有克服困难的信心和决心,有主动与他人合作和交流的精神;(3)密切联系实际,乐于在周围生活中发现和分析各种杠杆,具有利用杠杆方便自己生活的意识。
【教学重点与难点】重点:杠杆的平衡条件的探究过程、分析数据总结规律难点:引出力臂并能正确找到力臂及分析数据找规律。
第四节 杠杆

第四节杠杆(第一课时)学习目标1.了解杠杆及其五要素,会建立杠杆模型;2.会探究杠杆的平衡条件;3.掌握力臂的画法。
学习过程一.预习导学1.杠杆是在力的作用下能绕着转动的硬棒。
2.杠杆的五要素:(1)是指杠杆绕着转动的点,通常用字母O表示;(2)是使杠杆转动的力,用符号表示;(3)杠杆转动的力叫阻力,通常用字母F2 表示;(4)从到的距离叫动力臂;(5)从到的距离叫阻力臂。
3.在做“探究杠杆平衡条件”的实验时,实验前没有挂钩码时,若杠杆左端下倾,则应将平衡螺母向调节(选填“左”或“右”),使杠杆在水平位置平衡,其目的是。
4.课本68页第3题二.尝试练习1.3.如图所示的杠杆在水平位置处于平衡状态,则有F×=G×OB。
2..下列实物中,与杠杆无关的是()A.用鱼竿钓鱼B.用太平称质量C.用弹簧测力计测物体的重力D.用筷子夹菜3.作图题(1)如图2所示,AO是鱼竿,画出动力F1和阻力F2的力臂L1L2。
(2)如图3所示,一根轻质杠杆OA在力F1F2的作用下处于静止状态,L2是力F2的力臂。
请你在图中画出F2的示意图及F1的力臂。
三.互动点拨1.学生展示预习导学部分,教师演示实验“探究杠杆的平衡条件”2.学生演板练习画力臂。
四.课堂检测1.如图4所示,甲是我们常用的指甲刀,乙是它的示意图,使用时有个杠杆,分别是、、,支点分别是、、。
2.如图5所示,下列关于力F1力臂的作图正确的是()3.分别做出图6甲乙丙三个图中力F1的力臂4.在探究“杠杆平衡条件”的实验中:(1)实验前没有挂钩码时,若杠杆右端下倾,则应将平衡螺母向调节,使杠杆水平位置平衡,其目的是(2)如图7甲所示,杠杆每格长度相同,A处已挂4个相同钩码,要使杠杆在水平位置平衡,则应在杠杆B处挂个同样的钩码(3)如图7乙图所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,其示数将(填“变大”“变小”或“不变”),其原因是。
初三物理第十三章第四节杠杆作业(一)

初三物理第十三章第四、五节作业(一)班级:姓名:学号:一、判断题1、剪刀一定是省力杠杆。
()2、既省力又省移动距离的杠杆是没有的。
()3、杠杆上的支点总是在动力作用点与阻力作用点之间。
()二、实验题4、在研究“杠杆的平衡条件”的实验中,杠杆两端装有两只可调节的螺母,其作用是______________,实验中需要测量的物理量是_________,实验的结论是____________,若用弹簧秤代替杠杆一端的钩码进行实验,当弹簧秤由竖直方向拉改为斜向下拉时,(杠杆总处于平衡),弹簧秤的读数将______(选填变大、变小或不变),这是因为________________。
三、计算题5、杠杆AB长1米,支点距B端0.4米,AB两端分别挂200牛顿和250牛顿的物体,杠杆是否平衡?如果不平衡,应在哪一端增挂物体?该物重多少?6、如图13-11所示,物重500牛顿,它在外力F的作用下以0.2米/秒的速度匀速向左运动,设它与地面间的摩擦力为240牛顿,求:(1)拉力F是多少牛顿?(2)在2秒内绳的末端向右移动了多少距离?一、杠杆1、定义:在力的作用下能绕固定点转动的硬棒叫杠杆。
2、杠杆的五要素:支点、动力、阻力、动力臂、阻力臂。
3、杠杆的平衡条件:动力×动力臂=阻力×阻力臂F1·L1=F2·L24、杠杆分类:若L1>L2平衡时F1<F2这种杠杆叫省力杠杆,如钳子、扳手。
若L1=L2平衡时F1=F2这种杠杆叫等臂杠杆,如天平。
若L1<L2平衡时F1>F2这种杠杆叫费力杠杆,如理发剪、镊子、食物夹等。
二、滑轮1、定滑轮:概念:轴不随物体移动的滑轮。
支点:在滑轮轴上。
本质:等臂杠杆。
特点:不省力,但能改变力的方向。
2、动滑轮:概念:轴随物体一起移动的滑轮。
支点:在滑轮的边缘与固定边相切处。
本质:动力臂是阻力臂2倍的杠杆。
特点:可省一半的力,但不能改变力的方向,多移动距离。
3、滑轮组:特点:既可以省力,又可以改变力的方向省力情况:(n是承担吊着物体的绳子段数)。
第十三章.第四节 杠杆 (一)
F1动力 使杠杆转 动的力
L2阻力臂 支点O 杠杆绕着 转动的固 F2阻力 定点 阻碍杠杆 转动的力
L1动力臂 支点到动力作 用线的距离
动力作用线
杠杆五要素
图中所画力F的力臂L,对不对?
G
O A O C
L F
G
O B O L1 G
L F
L
G
F
D
L
F
1
古代建筑奇迹
埃及金字塔是世 界七大奇迹之一。其中 法老胡夫的陵墓最大, 高146.5米相当于40层 高的摩天大厦,由230 万块重约2.5吨的大石 块叠成,最大的一块重 约 16 吨!
你能说出阿基米德这样说的道理吗?
阿基米德:
给我一个支 点,我可以 撬动地球.
一、认识杠杆
观察下列工具,思考它们的共同特征。
(3)铁锹是一种杠杆,请在右图中画出F1和F2的力臂L1和L2。
L2
O
F1
o
L1
F2
5.如下左图,杠杆OA在力F1、F2的作用下处于静 止状态,L2是F2的力臂,画出F1的力臂L1和力F2
F2
L2
L1
6.如右图所示,使用羊角锤拔钉子,动力作用在锤柄上A 点. 请作出拔钉子时所用最小动力F的示意图.
L1
O
L2
画力臂的一般步骤
1、找出支点O的位置; 2、画出动力作用线和阻力作用线;
3、从支点分别作动力作用线和阻力 作用线的垂线即为动力臂和阻力臂, 并分别用l1、l2标出。
1.如下图所示,在图中分别画出力F1和F2对支点0的力臂L1和L2。
L2
L1
1.如下图所示,在图中分别画出力F1和F2对支点0的力臂L1和L2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4)最后用大括号勾出力臂,并在旁边写上字母 L1或L2。
一找支点 二画线(力的作用线)三定距离(力臂的长)
1、力臂是支点到力的作用线的垂直距离,
不是支点到力的作用点的距离;
2、 力的作用线是指通过力的作用点沿力
一条直线。 b 距离:点到直线的垂线段的长度。
F1
o L2
L1
F2
一、什么是杠杆
(
力
的
作
用
线
)
动
力
阻力臂支点ຫໍສະໝຸດ o(力动力臂
的
阻 力
作 用
杠杆“五要素”
线
)
o L2
L1
F2
F1
o L2
F1
L1
F2
画力臂的方法是:
(1)先确定杠杆的支点O和画动力、阻力的方向。
(2)过力的作用点沿力的方向画出力的作用线 (注意: 画的时候要用虚线将力的作用线延长。)
步骤2, 为什么在杠杆两边挂上不同数 量的钩码,调节钩码位置,使杠杆在水平 位置重新平衡?
答: 杠杆只有在水平位置平衡,量得支点到钩码的距离就是
力臂,此时杠杆如果不水平,则支点到钩码的距离就不是 力 臂。使杠杆在水平位置重新平衡,目的是从杠杆上的刻 度 值直接读出力臂的长度.
试验
观察实验,完成下列表格。
F1L1=F2L2
比较下列杠杆的动力臂和 阻力臂的大小
例题1:如图,一轻质杆OA一端固定 在竖直墙上,可绕O点转动,已知 0A=0.3cm,OB=0.2cm,在A点处悬挂 一重物G,质量为2kg,若在B处施一 竖直向上的拉力F,使杠杆在水平线 上平衡,此时拉力F为多少?
F
O
BA
例题2:如图:OB=2BA,物体重为 60N,不计杠杆自身重力,绳与杆的 夹角为30℃,则绳的拉力为多少?
O
BA
例题3:如图,杠杆上标有刻度, GB=5N,GA=8N,杠杆水平平 衡时,A物体对杠杆的拉力是多 少牛顿?
此时A物体受到地面对它的支持 力为多少?
A
B
一、杠杆的概念:在力的作用下能够绕固定点转动
的硬棒
支 点(o):杠杆绕着转动的点
动 力(F1):促使杠杆转动的力 阻 力(F2):阻碍杠杆转动的力 阻力臂(L2):从支点到阻力作用线的垂直距离
• 2、挂钩码后,不能再动平衡螺母。
• 3、读数时,杠杆仍要求是处于水平平 衡状态,以便直接读出力臂的长度。
提问:
步骤1,为什么调节杠杆两端的螺母使杠杆在 水平位置平衡?
答:在做“研究杠杆的平衡条件”的实验时,杠杆 有 一定的重力,为保证实验中杠杆的平衡条件: 动力×动力臂等于阻力×阻力臂成立,必须使 杠杆的重力(包括两端的平衡螺母的总重力) 乘以其力臂为零。调节杠杆两端的平衡螺母, 使杠杆在水平位置平衡,就是要保证杠杆的总 重力乘以其力臂为零,同时为了实验时方便在 杠杆上直接读出力臂。
杠杆平衡与哪些因素有关?
• 【猜想假设】 • 【所需器材】 • 【实验步骤】 • 【分析数据】 • 【实验结论】 • 【启发联想】
数据记录表格为;
实验 动力 次数 F1/N
1
动力臂 动力 阻力
l1/cm
动力臂 F2/N
阻力臂 阻力
l2/cm 阻力臂
2
3
实验过程
• 实验注意事项:
• 1、在实验前要通过调节杠杆两端的平 衡螺母,使杠杆水平平衡。
撬棒在撬石 头的过程中 时怎么样运 动的?
什么是动力,什么是阻力
• 2、杠杆的五要素: 1 .支点(O):杠杆绕着转动的点。
2 .动力(F1) :使杠杆转动的力。
3 .阻力(F2) :阻碍杠杆转动的力。
4 .动力臂(L1) :从支点到动力作用线的距离。
5 .阻力臂(L2) :从支点到阻力作用线的距离。 a 力的作用线:通过力的作用点,沿力的方向所画的
试验 次数
动力
F1 (牛)
动力 臂l1 (厘 米)
动力 ×动 力臂
阻力
F2 (牛)
阻力 臂l1 (厘 米)
阻力 ×阻 力臂
1
155
0.5 10 5
2
1 10 10 2 5 10
3
1.5 10 15 1 15 15
实验结论: 杠杆的平衡条件: 动力×动力臂=阻力×阻力臂 即:杠杆的平衡取决于力和力臂的 乘积.
(力的作用线:过力的作用点,沿力的方向的直线)
二、杠杆的平衡条件:动力动力臂=阻力阻力臂
L2 O F2
L1 F1
活动三:观察自行车和剪刀
研究杠杆平衡的条件
L1
L2
o
F2
F1
• 【学习目标】
• 3.理解杠杆的平衡条件,能通过实验 探究总结出杠杆的平衡条件,会用杠 杆的平衡条件解题。
• 4.了解杠杆的应用,能对杠杆进行分 类,并了解分类原则。
二、杠杆平衡的条件
• 杠杆平衡:指杠杆静止不动或作缓慢 匀速转动时的状态。
这些能给我们提供某些方便的工具都称为机械
复 杂 机 械 都 是 由 简 单 机 械 组 成 的
(抽油机)
它 们 都 是 杠 杆 , 有 什 么 共 同 特 点 ?
一、什么是杠杆?
• 1、定义:在力的作用下能绕固定点转 动的硬棒就是杠杆。
注意:硬棒可以是直,也可以是弯曲的, 即硬棒可以是各种各样的形状.
的方向所画的直线。
3、作用在杠杆上的力,若作用点不变,
但作用力的方向改变,力臂一般也改变,力 的作用效果也不同。
4、杠杆的力臂不一定在杠杆上。
L1 O
F1
F3 F2
力臂的两种表示方法:大括号和箭头
练习
找出下列各图中动力和阻力,并画出杠杆力臂。
F2
L1 O
F1
练习
找出下列各图中动力和阻力,并画出杠杆力臂。